

-
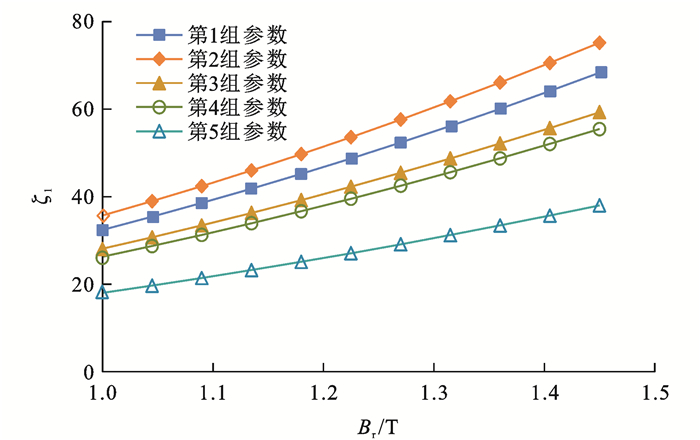
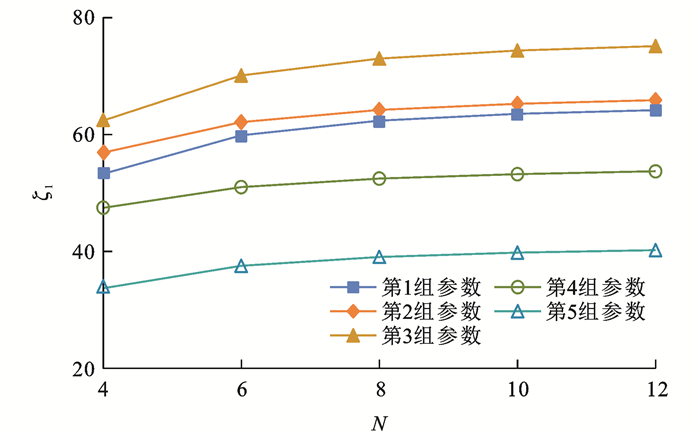
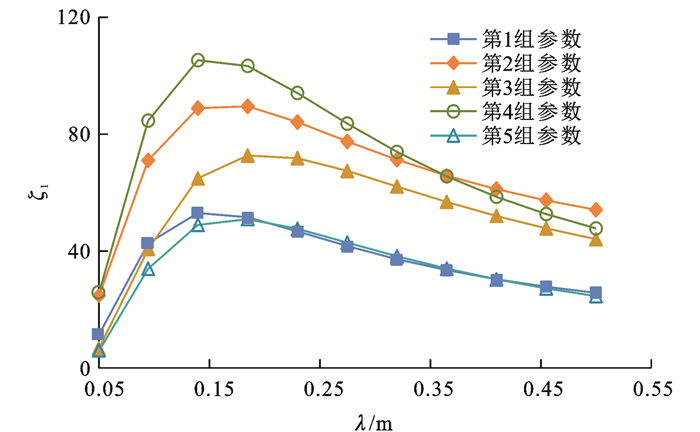
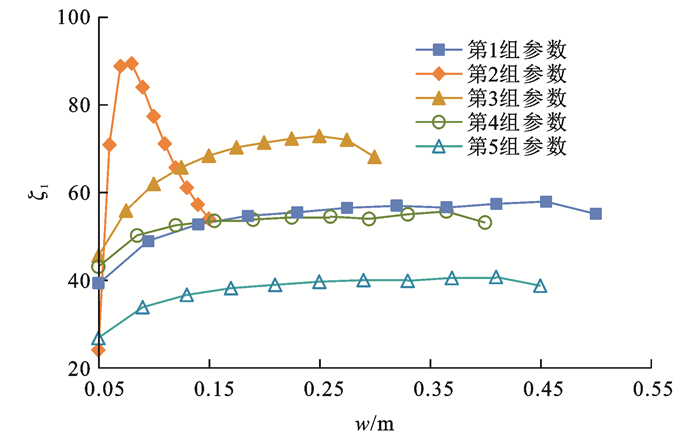
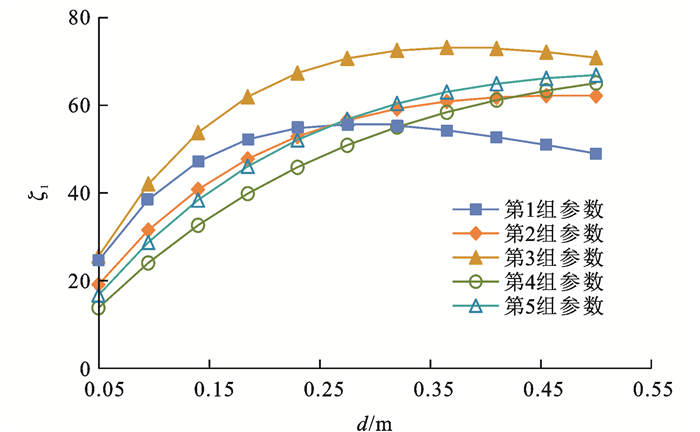
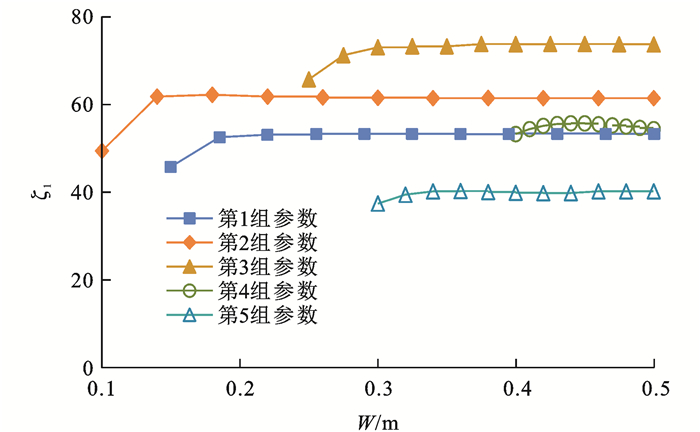
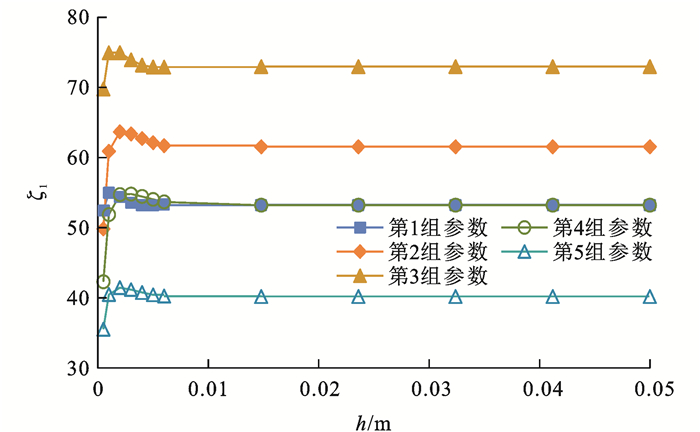
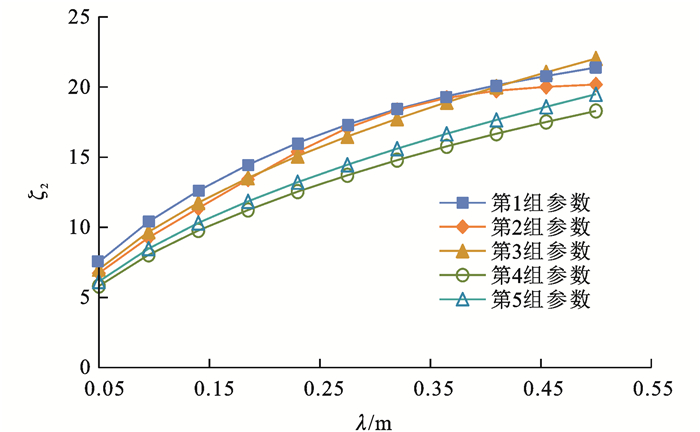
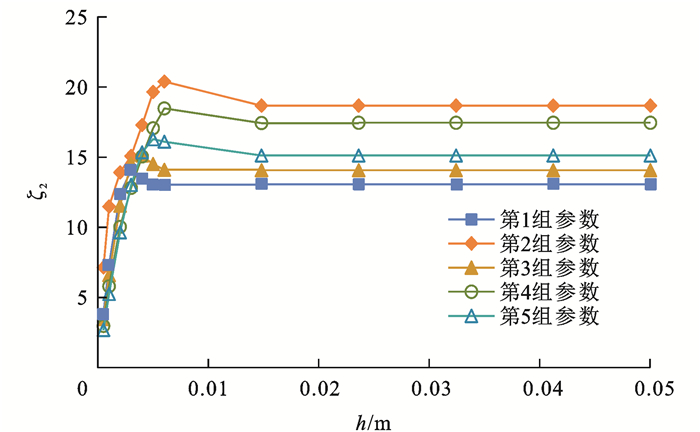
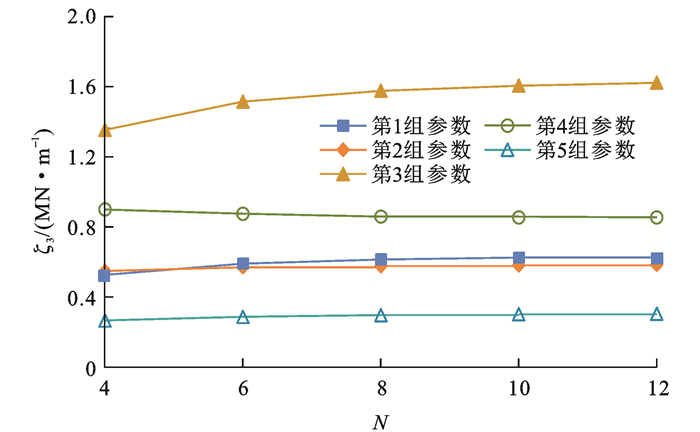
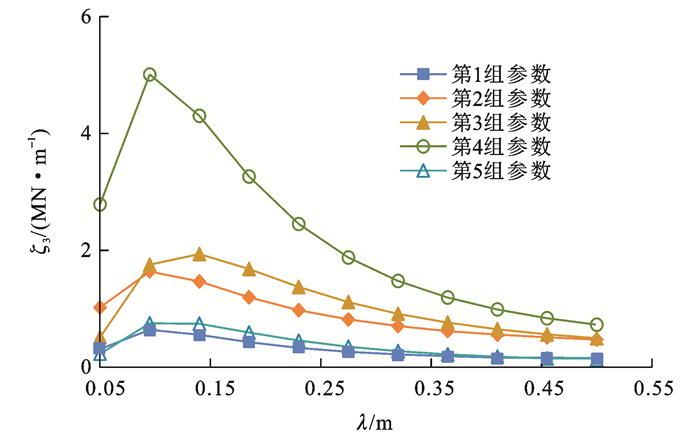
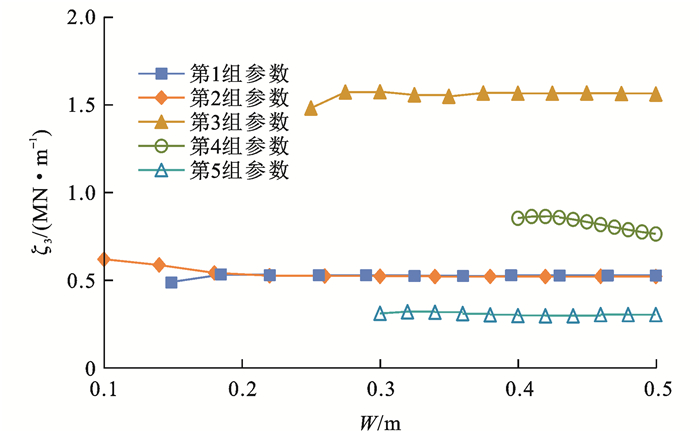
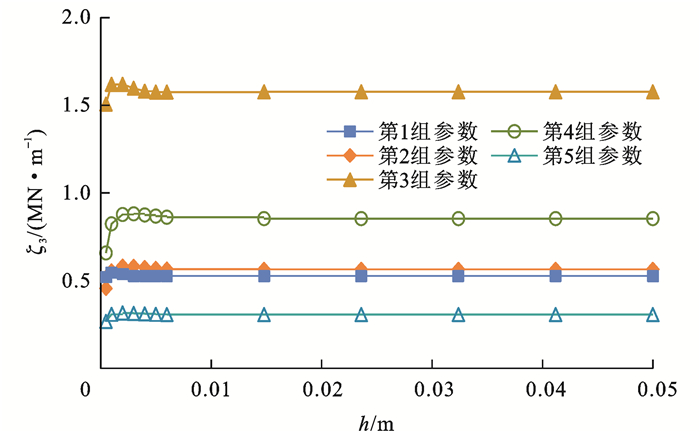
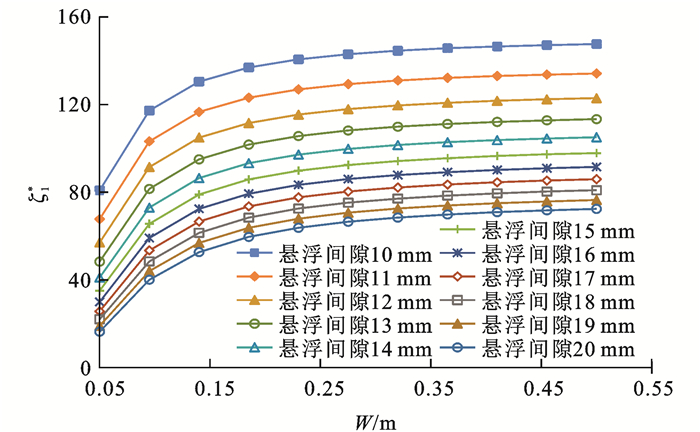
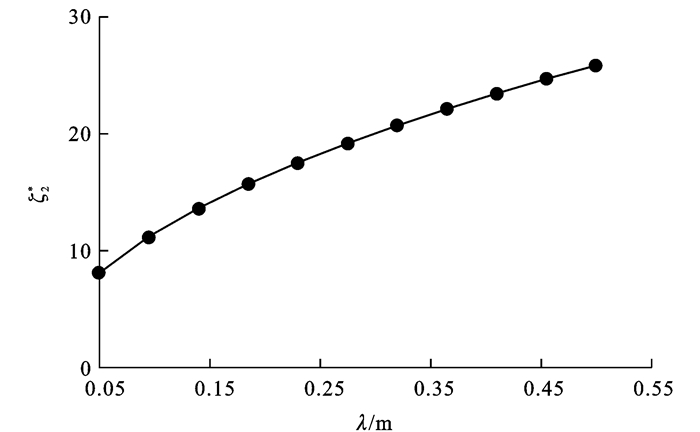
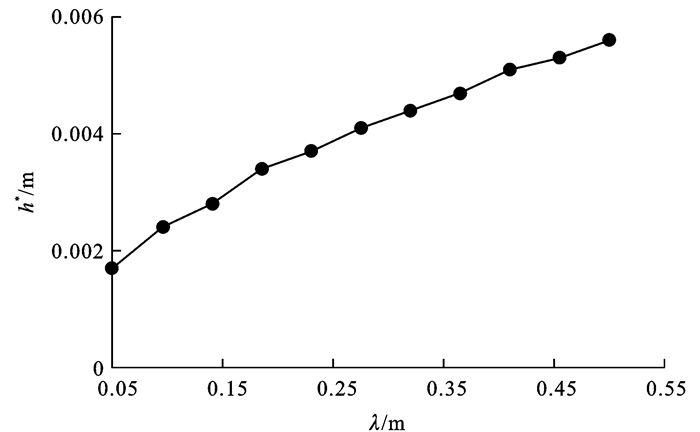
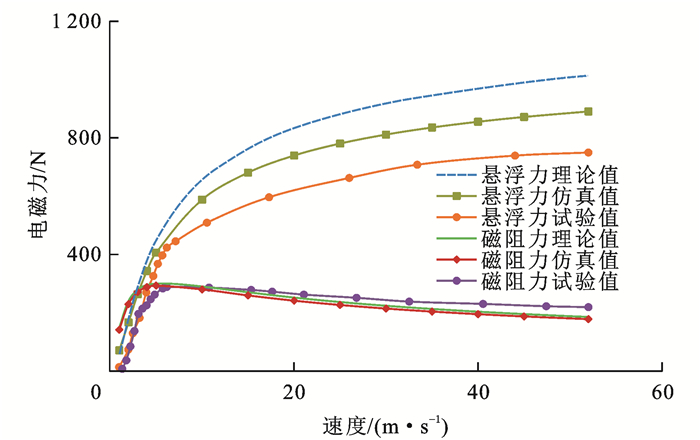
摘要: 针对超高速永磁电动悬浮系统浮重比、浮阻比和悬浮刚度的优化问题,划分了求解域,建立了边界条件,明确了电磁力的表达式;采用了控制变量法,选取了5组相互独立的特征参数,分析了特征参数对各优化指标的影响,指出了不同优化指标的可优化变量;研究了不同悬浮间隙下浮重比最大时,永磁阵列波长、厚度、宽度和感应板宽度、厚度的取值,探讨了不同悬浮间隙下浮阻比最大时,永磁阵列波长和感应板厚度的取值,分析了不同悬浮间隙下悬浮刚度最大时,永磁阵列波长、厚度、宽度和感应板厚度的取值;开展了永磁电动悬浮系统试验研究,得到了电磁力随永磁阵列线速度的变化规律。研究结果表明:超高速情况下,浮重比随永磁阵列剩磁的增加而显著增加,随单位波长永磁体个数的增加而单调增加,随永磁阵列波长和宽度的增加大体上先增加后减少, 浮重比受永磁阵列厚度的影响明显;浮阻比受永磁阵列剩磁、永磁阵列宽度、感应板宽度、悬浮间隙的影响较小,受感应板厚度影响明显,永磁阵列波长、厚度和速度越大对提高浮阻比越有利;悬浮刚度随永磁阵列剩磁、永磁阵列宽度及厚度的增加单调递增,随永磁阵列波长的增加先增加后减少,随导体板厚度的增加先迅速增加然后缓慢下降,随悬浮间隙的增加变化显著,随速度几乎不发生变化;以浮重比为优化指标,当悬浮间隙从0.012 m增加至0.020 m时,永磁阵列厚度、波长、感应板宽度的最优取值逐渐增加,而永磁阵列宽度的最优取值逐渐减小,浮重比最优值下降了约50.00%;以浮阻比为优化指标,当永磁阵列波长从0.050 m增加至0.500 m时,感应板厚度的最优值逐渐增加,浮阻比的最优值提高了约2倍;以悬浮刚度为优化指标,当悬浮间隙从0.012 m增加至0.020 m时,永磁阵列波长的最优取值逐渐增加,永磁阵列宽度最优值等于感应板宽度,感应板厚度的最优取值约为0.001 m,悬浮刚度的最优值下降约50.00%;试验得到的线速度为0~50.00 m·s-1时的电磁力变化趋势与理论计算、仿真结果一致,悬浮力随速度的增加先迅速增加,然后逐渐平稳;磁阻力随速度的增加先迅速增加,在线速度为4.00 m·s-1附近时达到最大,然后缓慢下降。Abstract: In view of the optimization of the lift-to-weight ratio, lift-to-drag ratio, and suspension stiffness of the ultra-high speed permanent magnet(PM) electrodynamic suspension (EDS) system, the solution domain was divided, and boundary conditions were established. In addition, the expression of the electromagnetic force was clarified. The control variable method was adopted, five groups of independent characteristic parameters were selected, the influences of characteristic parameters on each optimization indicator were analyzed, and the optimizable variables of different optimization indicators were pointed out. The values of wavelength, thickness, and width of the permanent magnet array and the width and thickness of the induction plate were studied when the lift-to-weight ratio was the maximum under different suspension gaps. The values of wavelength of the permanent magnet array and the thickness of the induction plate were studied when the lift-to-drag ratio was the maximum under different suspension gaps. The wavelength, thickness, and width of the permanent magnet array and the thickness of the induction plate were studied when the suspension stiffness was the maximum under different suspension gaps. An experimental study of the PM EDS system was carried out, and the variation rules of electromagnetic force with the linear velocity of the permanent magnet array were obtained. Research results show that at an ultra-high speed, the lift-to-weight ratio increases significantly with the increase in the remanence of the permanent magnet array, increases monotonically with the increase in the number of permanent magnets per unit wavelength, and generally increases initially and then decreases as the wavelength and width of the permanent magnet array increase. The lift-to-weight ratio is significantly affected by the thickness of the permanent magnet array. The lift-to-drag ratio is less affected by the remanence of the permanent magnet array, the widths of the permanent magnet array and the induction plate, and the suspension gap. In addition, the lift-to-drag ratio is significantly affected by the thickness of the induction plate. Greater wavelength, thickness, and speed of the permanent magnet array are more beneficial to improve the lift-to-drag ratio. The suspension stiffness increases monotonically with the increase in the remanence, width, and thickness of the permanent magnet array, initially increases and then decreases with the increase in the wavelength of the permanent magnet array, and initially increases rapidly and then slowly decreases with the increase in the thickness of the conductor plate. The suspension stiffness changes significantly with the increase in the suspension gap and changes little with speed. By taking the lift-to-weight ratio as the optimization indicator, when the suspension gap increases from 0.012 m to 0.020 m, the optimal thickness and wavelength of the permanent magnet array and the width of the induction plate gradually increase, while the optimal width of the permanent magnet array gradually decreases. The optimal lift-to-weight ratio drops by about 50.00%. By taking the lift-to-drag ratio as the optimization indicator, when the wavelength of the permanent magnet array increases from 0.050 m to 0.500 m, the optimal thickness of the induction plate gradually increases, and the optimal lift-to-drag ratio triples approximately. By taking the suspension stiffness as the optimization indicator, when the suspension gap increases from 0.012 m to 0.020 m, the optimal wavelength of the permanent magnet array gradually increases, and the optimal width of the permanent magnet array is equal to the width of the induction plate. Furthermore, the optimal thickness of the induction plate is around 0.001 m, and the optimal suspension stiffness decreases by approximately 50.00%. Through experiments, the changing trend of electromagnetic forces at linear speeds of 0-50.00 m·s-1 is consistent with the theoretical calculation and simulation results. The lift force first increases rapidly with the increase in speed and then gradually becomes stable. The detent force increases sharply with the increase in speed, reaches the maximum value when the linear speed is about 4.00 m·s-1, and then decreases slowly. 3 tabs, 19 figs, 30 refs.
-

图 19 电磁力的理论、仿真与试验结果对比
Figure 19. Electromagnetic force comparation among theoretical, simulation and experimental results
表 1 五组特征参数的取值
Table 1. Values of characteristic parameters in five groups
编号 1 2 3 4 5 N 4 6 8 10 12 Br/T 1.28 1.35 1.40 1.42 1.44 λ/m 0.150 0.400 0.200 0.450 0.300 w/m 0.150 0.100 0.250 0.400 0.300 d/m 0.020 0.045 0.035 0.030 0.015 H/m 0.020 0.050 0.010 0.015 0.025 W/m 0.500 0.150 0.300 0.400 0.450 δ/m 0.015 0.010 0.017 0.012 0.020 v/(m·s-1) 300.00 240.00 260.00 180.00 200.00  下载: 导出CSV
下载: 导出CSV
表 2 进行浮重比优化时特征参数的最优取值
Table 2. Optimal values of characteristic parameters for lift-to-weight ratio optimization
δ/m d*/m λ*/m w*/m h*/m ζ1* 0.012 0.026 0.143 0.153 0.001 111.50 0.014 0.029 0.164 0.150 0.001 93.20 0.016 0.033 0.184 0.148 0.001 79.30 0.018 0.035 0.204 0.146 0.001 68.40 0.020 0.038 0.222 0.145 0.001 59.60
下载: 导出CSV
表 3 进行悬浮刚度优化时特征参数的最优取值
Table 3. Optimal values of characteristic parameters for suspension stiffness optimization
δ/m λ*/m w*/m d*/m h*/m ζ3*/(MN·m-1) 0.012 0.113 0.320 0.050 0.001 5.60 0.014 0.125 0.320 0.050 0.001 4.50 0.016 0.137 0.320 0.050 0.001 3.70 0.018 0.148 0.320 0.050 0.001 3.00 0.020 0.158 0.320 0.050 0.001 2.60
下载: 导出CSV
-
[1] 邓自刚, 刘宗鑫, 李海涛, 等. 磁悬浮列车发展现状与展望[J]. 西南交通大学学报, 2022, 57(3): 455-474, 530.DENG Zi-gang, LIU Zong-xin, LI Hai-tao, et al. Development status and prospect of maglev train[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 455-474, 530. (in Chinese) [2] 周永刚, 王鹏, 陈高华, 等. 基于实测数据的磁浮列车设备加速振动试验研究[J]. 机车电传动, 2023(4): 57-63.ZHOU Yong-gang, WANG Peng, CHEN Gao-hua, et al. Research of accelerated vibration test of maglev train equipment based on measured data[J]. Electric Drive for Locomotives, 2023(4): 57-63. (in Chinese) [3] HE Jian-liang, ROTE D M, COFFEY H T. Applications of the dynamic circuit theory to maglev suspension systems[J]. IEEE Transactions on Magnetics, 1993, 29(6): 4153-4164. doi: 10.1109/20.280868 [4] WALIA S, SATYA V, MALIK S, et al. Rocket sled based high speed rail track test facilities: a review[J]. Defence Science Journal, 2022, 72(2): 182-194. doi: 10.14429/dsj.72.17014 [5] 熊嘉阳, 邓自刚. 高速磁悬浮轨道交通研究进展[J]. 交通运输工程学报, 2021, 21(1): 177-198. doi: 10.19818/j.cnki.1671-1637.2021.01.008XIONG Jia-yang, DENG Zi-gang. Research progress of high-speed maglev rail transit[J]. Journal of Traffic and Transportation Engineering, 2021, 21(1): 177-198. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2021.01.008 [6] 贺光. 基于Halbach结构的永磁电动与电磁混合悬浮技术研究[D]. 长沙: 国防科学技术大学, 2010.HE Guang. Research on permanent-magnet EDS and EMS hybrid suspension system based on Halbach structure[D]. Changsha: National University of Defense Technology, 2010. (in Chinese) [7] 李春生. 永磁电动式磁悬浮的研究[D]. 北京: 中国科学院, 2007.LI Chun-sheng. Study on permanent magnet electrodynamic maglev system[D]. Beijing: Chinese Academy of Sciences, 2007. (in Chinese) [8] 陈殷. 低速永磁电动悬浮电磁力特性研究[D]. 成都: 西南交通大学, 2015.CHEN Yin. Characteristic analysis of electromagnetic forces created by low-speed PM electrodynamic suspension[D]. Chengdu: Southwest Jiaotong University, 2015. (in Chinese) [9] CHEN Yin, ZHANG Wen-long, BIRD J Z, et al. A 3-D analytic-based model of a null-flux Halbach array electrodynamic suspension device[J]. IEEE Transactions on Magnetics, 2015, 51(11): 1-5. [10] CHEN Yin, ZHANG Kun-lun. Electromagnetic force calculation of conductor plate double Halbach permanent magnet electrodynamic suspension[J]. ACES Journal, 2014, 29(11): 916-922. [11] GUROL H. General atomics linear motor applications: moving towards deployment[J]. Proceedings of the IEEE, 2009, 97(11): 1864-1871. doi: 10.1109/JPROC.2009.2030244 [12] GUROL H, BALDI R, JETER P, et al. General atomics low speed maglev technology development program (supplemental#3) [J]. Magnetic Levitation Vehicles, 2005, 57(10): 2988-3000. [13] POST R F, RYUTOV D D. The inductrack: a simpler approach to magnetic levitation[J]. IEEE Transactions on Applied Superconductivity, 2000, 10(1): 901-904. doi: 10.1109/77.828377 [14] FLANKL M, WELLERDIECK T, TUYSUZ A, et al. Scaling laws for electrodynamic suspension in high-speed transportation[J]. IET Electric Power Applications, 2017, 12(3): 357-364. [15] ABDELRAHMAN A S, SAYEED J, YOUSSEF M Z. Hyperloop transportation system: analysis, design, control, and implementation[J]. IEEE Transactions on Industrial Electronics, 2017, 65(9): 7427-7436. [16] DAVEY K. Optimization shows Halbach arrays to be non-ideal for induction devices [J]. IEEE Transactions on Magnetics, 2000, 36(4): 1035-1038. doi: 10.1109/20.877618 [17] HAN Qing-hua. Analysis and modeling of the EDS maglev system based on the Halbach permanent magnet array[D]. Orlando: University of Central Florida, 2004. [18] 李春生, 杜玉梅, 严陆光. 应用于磁浮列车的直线型Halbach磁体的结构优化设计[J]. 高技术通讯, 2007, 17(7): 724-729.LI Chun-sheng, DU Yu-mei, YAN Lu-guang. Optimal design of linear PM Halbach array for EDS maglev [J]. Chinese High Technology Letters, 2007, 17(7): 724-729. (in Chinese) [19] 李春生, 杜玉梅, 夏平畴, 等. 直线型Halbach磁体和导体板构成的电动式磁悬浮系统的分析及实验[J]. 电工技术学报, 2009, 24(1): 18-22.LI Chun-sheng, DU Yu-mei, XIA Ping-chou, et al. Analysis and experimental resting of EDS maglev with linear Halbach and conducting sheet[J]. Transactions of China Electrotechnical Society, 2009, 24(1): 18-22. (in Chinese) [20] DUAN Jia-heng, SONG Xiao, ZHANG Kun-lun, et al. Analysis and optimization of asymmetrical double-sided electrodynamic suspension devices [J]. IEEE Transactions on Magnetics, 2019, 55(6): 1-5. [21] 段家珩. 永磁板式电动悬浮边端效应及三维电磁力特性的研究[D]. 成都: 西南交通大学, 2021.DUAN Jia-heng. Characteristic investigation of transverse end effects and electromagnetic forces generated by PM electrodynamic suspension system[D]. Chengdu: Southwest Jiaotong University, 2021. (in Chinese) [22] 罗成, 张昆仑, 王滢. 永磁电磁混合Halbach阵列电动悬浮的稳定性控制[J]. 西南交通大学学报, 2022, 57(3): 574-581.LUO Cheng, ZHANG Kun-lun, WANG Ying. Stability control of electrodynamic suspension with permanent magnet and electromagnet hybrid Halbach array[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 574-581. (in Chinese) [23] 罗成, 张昆仑, 靖永志. 新型Halbach阵列永磁电动悬浮系统垂向稳定性[J]. 交通运输工程学报, 2019, 19(2): 101-109. doi: 10.19818/j.cnki.1671-1637.2019.02.010LUO Cheng, ZHANG Kun-lun, JING Yong-zhi. Vertical stability of permanent magnet EDS system with novel Halbach array[J]. Journal of Traffic and Transportation Engineering, 2019, 19(2): 101-109. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2019.02.010 [24] 罗成, 朱开锋, 张昆仑, 等. 永磁电磁混合Halbach阵列空间磁场三维解析计算及参数分析[J]. 电机与控制学报, 2021, 25(7): 20-29.LUO Cheng, ZHU Kai-feng, ZHANG Kun-lun, et al. Analytical calculation and parameter analysis of 3D space magnetic field of permanent magnet and electromagnet hybrid Halbach array[J]. Electric Machines and Control, 2021, 25(7): 20-29. (in Chinese) [25] LUO Cheng, ZHANG Kun-lun, ZHANG Wen-long, et al. 3D analytical model of permanent magnet and electromagnetic hybrid Halbach array electrodynamic suspension system[J]. Journal of Electrical Engineering and Technology, 2020, 15(4): 1713-1721. doi: 10.1007/s42835-020-00449-y [26] 巫川, 李冠醇, 王东. 永磁电动悬浮系统三维解析建模与电磁力优化分析[J]. 电工技术学报, 2021, 36(5): 924-934.WU Chuan, LI Guan-chun, WANG Dong. 3-D analytical modeling and electromagnetic force optimization of permanent magnet electrodynamic suspension system[J]. Transactions of China Electrotechnical Society, 2021, 36(5): 924-934. (in Chinese) [27] WANG Fu-yao, ZHANG Jie-long, ZHAO Ji-ding, et al. Two dimensional analytical modeling and electromagnetic force optimization of permanent magnet electrodynamic suspension system[C]//IEEE. 202113th International Symposium on Linear Drives for Industry Applications (LDIA). New York: IEEE, 2021: 1-5. [28] HU Yong-pan, LONG Zhi-qiang, ZENG Jie-wei, et al. Analytical optimization of electrodynamic suspension for ultrahigh-speed ground transportation[J]. IEEE Transactions on Magnetics, 2021, 57(8): 1-11. [29] HU Yong-pan, LONG Zhi-qiang, XU Yun-song, et al. Control-oriented modeling for the electrodynamic levitation with permanent magnet Halbach array[J]. International Journal of Applied Electromagnetics and Mechanics, 2021, 67(3): 1-19. [30] LONG Zhi-qiang, HE Guang, XUE Song. Study of EDS and EMS hybrid suspension system with permanent-magnet Halbach array[J]. IEEE Transactions on Magnetics, 2011, 47(12): 4717-4724. doi: 10.1109/TMAG.2011.2159237 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 99
- HTML全文浏览量: 13
- PDF下载量: 43
- 被引次数: 0
