

Cooperative merging control of connected and automated vehicles in merging area for one-way three-lane freeway
-
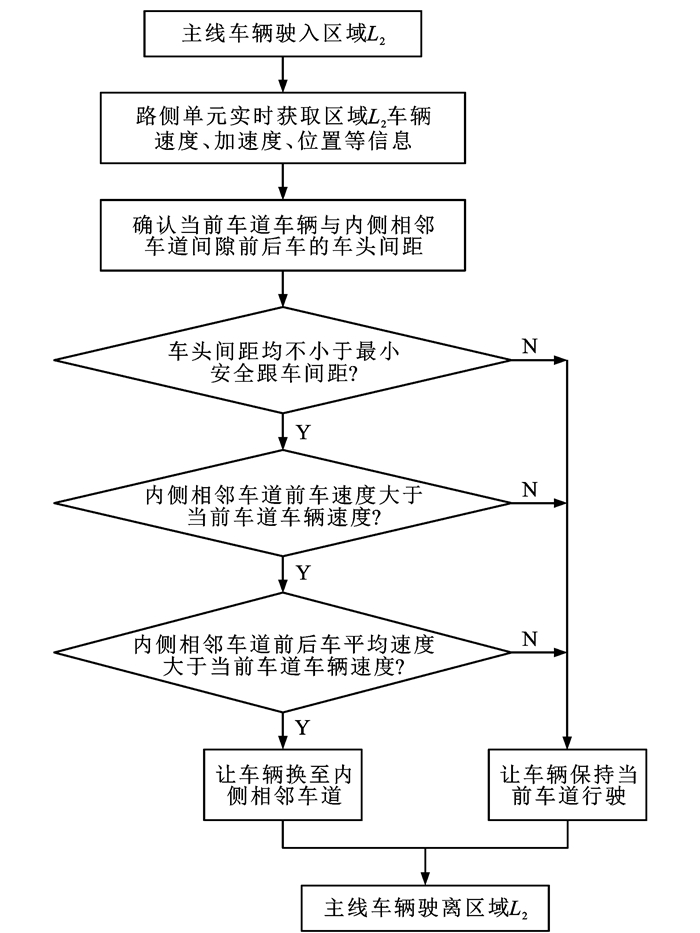
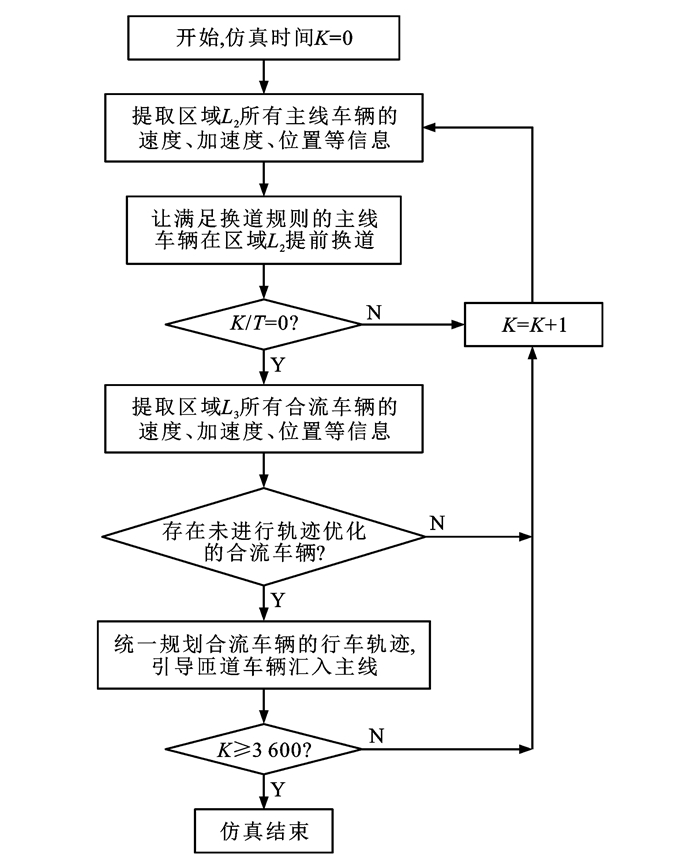
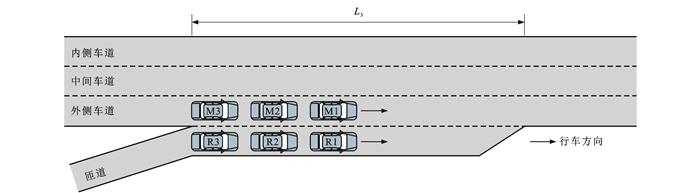
摘要: 为提高多车道高速公路入口匝道智能网联车辆合流安全性与通行效率,提出了一种基于规则的换道策略和一个时间离散的车辆轨迹优化模型,以进行协同汇入控制;以普通单向三车道高速公路匝道合流区为研究对象,将合流区及其上下游路段划分为4个区域,并对关键的提前换道区和协同合流区分别进行交通控制;在上游提前换道区,基于最小安全跟车间距和速度效益的换道规则,将部分主线外侧车道、中间车道的车辆在合流区上游提前换道至内侧相邻车道,以此减轻合流区外侧车道的交通压力,提高合流效率;在下游协同合流区,选取合适的周期时长,以周期内合流车辆行驶速度最大为目标,不固定合流点,规划合流车辆的纵向行车轨迹,引导匝道车辆在周期结束后汇入主线,实现协同合流;利用SUMO和Python仿真验证提出的协同汇入控制方法,并进行临界跟驰车头间距的敏感性分析。仿真结果表明:与无控制自然合流相比,提出的协同汇入控制方法在不同的交通需求水平下能使车辆平均速度提高4.9%~21.1%,平均延误降低29.9%~56.5%,且不会出现停车现象;与先进先出合流控制相比,在高匝道交通需求水平下能使车辆平均速度提高3.4%~9.6%,平均延误降低22.9%~39.4%;较低的临界跟驰车头间距可以更好地提高合流区通行效率,且在主线交通需求水平较高时更明显。Abstract: In order to improve the merging safety and traffic efficiency of connected and automated vehicles (CAVs) at multilane freeway on-ramps, a rule-based lane-changing strategy and a discrete-time vehicle trajectory optimization model were proposed to implement cooperative merging control. With the merging area for common one-way three-lane freeway ramps as the research object, the merging area and its upstream and downstream sections were divided into four areas, and traffic control was carried out in the key lane-changing area and cooperative merging area. In the upstream lane-changing area, based on the lane change rules of minimum safe following headway and speed benefit, the vehicles in the outer lane and the middle lane of part of the mainline could change to the adjacent inner lanes in the upstream of the merging area in advance, so as to reduce the traffic pressure on the outer lane of the merging area and improve the merging efficiency. In the downstream cooperative merging area, the appropriate cycle time was chosen. With the maximum speed of merging vehicles during the cycle time as the goal, the longitudinal trajectory of the merging vehicle was planned without a fixed merging point, and the ramp vehicles were guided to merge into the mainline at the end of the cycle, so as to realize cooperative merging. The cooperative merging control method was verified by SUMO and Python simulation, and the sensitivity analysis of critical car-following headway was conducted. Simulation results show that compared with uncontrolled natural merging, the proposed cooperative merging control method can increase the average speed of vehicles by 4.9%-21.1% and reduce the average delay of vehicles by 29.9%-56.5% under different traffic demand levels, and it ensures that no vehicle stops. Compared with first-in first-out merging control, the proposed cooperative merging control method can increase the average speed of vehicles by 3.4%-9.6% and reduce the average delay of vehicles by 22.9%-39.4% under high ramp traffic demand levels. Furthermore, the lower critical car-following headway can improve the traffic efficiency in the merging area, and it is more obvious under the high demand level of mainline traffic.
-

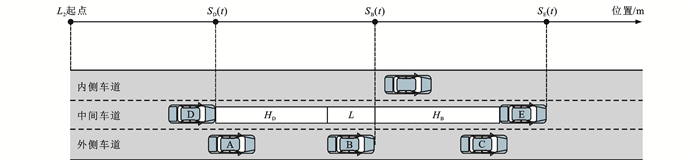
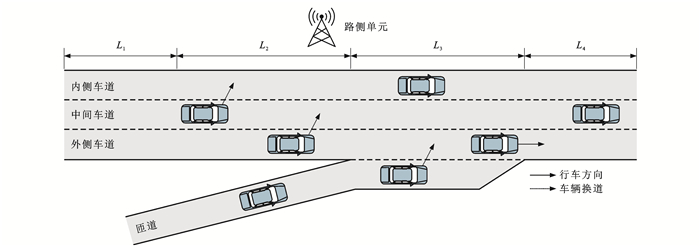
图 1 单向三车道高速公路协同合流场景
Figure 1. Cooperative merging Scenarios of one-way three-lane freeway

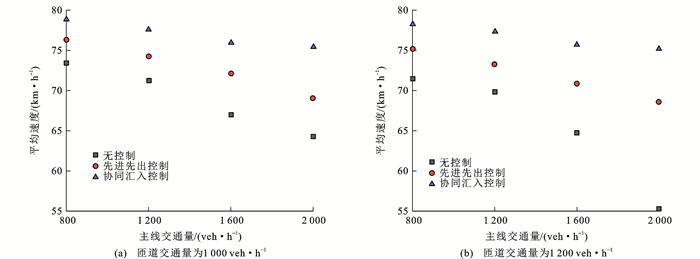
图 8 不同主线交通需求水平下车辆平均速度对比
Figure 8. Comparison of average speeds of vehicles under different mainline traffic demand levels

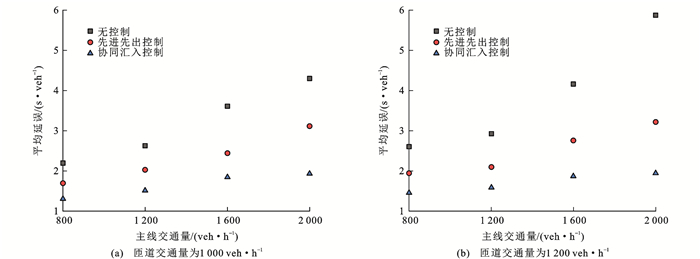
图 9 不同主线交通需求水平下车辆平均延误对比
Figure 9. Comparison of average delays of vehicles under different mainline traffic demand levels

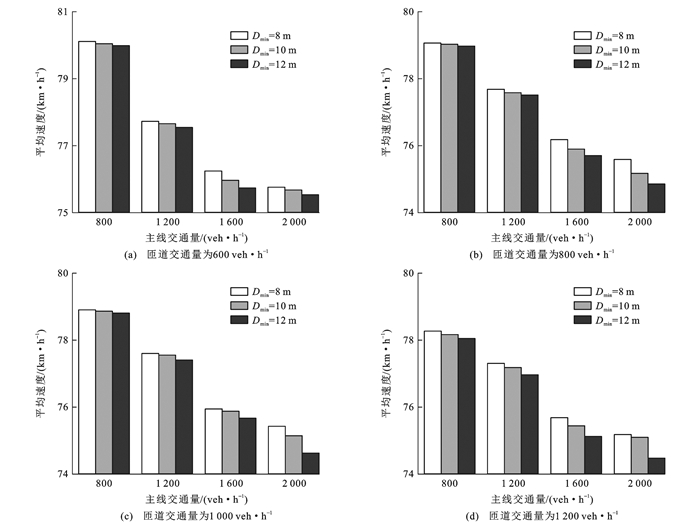
图 10 不同的临界跟驰车头间距下车辆平均速度对比
Figure 10. Comparison of average speeds of vehicles under different critical car-following headways

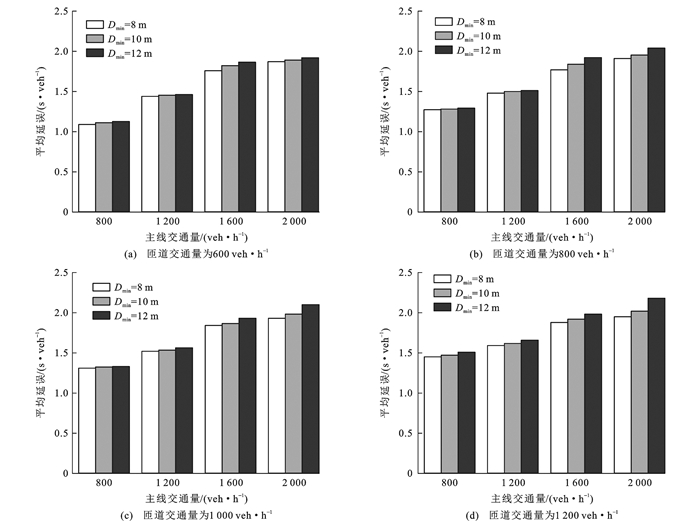
图 11 不同的临界跟驰车头间距下车辆平均延误对比
Figure 11. Comparison of average delays of vehicles under different critical car-following headways
表 1 仿真试验参数
Table 1. Simulated experimental parameters
参数 数值 参数 数值 t0/s 1.2 vr_max/(m·s-1) 16.7 s0/m 2 amax/(m·s-2) 5 L/m 5 amin/(m·s-2) -5 H1/m 200 Amax/(m·s-2) 3 H2/m 300 Dmin/m 8 H3/m 300 Δk/s 1 H4/m 200 T/s 6 vm_max/(m·s-1) 25  下载: 导出CSV
下载: 导出CSV
表 2 不同交通需求水平下车辆平均速度对比
Table 2. Comparison of average speeds of vehicles under different traffic demand levels
km·h-1 匝道交通量/(veh·h-1) 控制方式 主线交通量/(veh·h-1) 800 1 200 1 600 2 000 600 无控制 77.40 74.85 70.99 69.37 仅轨迹优化控制 78.88(+1.9%) 76.43(+2.1%) 75.13(+5.8%) 74.48(+7.4%) 协同汇入控制 80.10(+3.5%) 77.72(+3.8%) 76.24(+7.4%) 75.76(+9.2%) 800 无控制 75.56 72.07 68.65 65.12 仅轨迹优化控制 77.47(+2.5%) 76.01(+5.5%) 75.02(+9.3%) 74.45(+14.3%) 协同汇入控制 79.07(+4.6%) 77.68(+7.8%) 76.18(+11.0%) 75.59(+16.1%) 1 000 无控制 73.44 71.24 67.00 64.30 仅轨迹优化控制 77.25(+5.2%) 75.28(+5.7%) 74.27(+10.8%) 73.84(+14.8%) 协同汇入控制 78.90(+7.4%) 77.60(+8.9%) 75.94(+13.3%) 75.43(+17.3%) 1 200 无控制 71.50 69.84 64.73 55.01 仅轨迹优化控制 76.86(+7.5%) 75.05(+7.5%) 73.26(+13.2%) 71.49(+30.0%) 协同汇入控制 78.26(+9.5%) 77.30(+10.7%) 75.68(+16.9%) 75.19(+36.7%)
下载: 导出CSV
表 3 不同交通需求水平下车辆平均延误对比
Table 3. Comparison of average delays of vehicles under different traffic demand levels s·veh-1
匝道交通量/(veh·h-1) 控制方式 主线交通量/(veh·h-1) 800 1 200 1 600 2 000 600 无控制 1.44 2.02 2.70 3.05 仅轨迹优化控制 1.27(-11.8%) 1.68(-16.8%) 1.98(-26.7%) 2.08(-31.8%) 协同汇入控制 1.10(-23.6%) 1.44(-28.7%) 1.76(-34.8%) 1.87(-38.7%) 800 无控制 1.77 2.43 3.22 4.10 仅轨迹优化控制 1.54(-13.0%) 1.80(-25.9%) 1.99(-38.2%) 2.11(-48.5%) 协同汇入控制 1.27(-28.2%) 1.48(-39.1%) 1.77(-45.0%) 1.91(-53.4%) 1 000 无控制 2.20 2.63 3.61 4.30 仅轨迹优化控制 1.56(-29.1%) 1.93(-26.6%) 2.13(-41.0%) 2.21(-48.6%) 协同汇入控制 1.31(-40.4%) 1.52(-42.2%) 1.84(-49.0%) 1.93(-55.1%) 1 200 无控制 2.60 2.93 4.17 5.89 仅轨迹优化控制 1.65(-36.5%) 1.94(-33.8%) 2.30(-44.8%) 2.58(-56.2%) 协同汇入控制 1.45(-44.2%) 1.59(-45.7%) 1.88(-54.9%) 1.95(-66.9%)
下载: 导出CSV
表 4 不同交通需求水平下车辆总停车次数对比
Table 4. Comparison of total stops of vehicles under different traffic demand levels
匝道交通量/(veh·h-1) 控制方式 主线交通量/(veh·h-1) 800 1 200 1 600 2 000 600 无控制 0 0 0 0 仅轨迹优化 0 0 0 0 协同汇入控制 0 0 0 0 800 无控制 0 0 2 9 仅轨迹优化 0 0 0 0 协同汇入控制 0 0 0 0 1 000 无控制 0 0 5 24 仅轨迹优化 0 0 0 0 协同汇入控制 0 0 0 0 1 200 无控制 0 4 10 68 仅轨迹优化 0 0 0 3 协同汇入控制 0 0 0 0
下载: 导出CSV
-
[1] 《中国公路学报》编辑部. 中国交通工程学术研究综述·2016[J]. 中国公路学报, 2016, 29(6): 1-161.Editorial Department of China Journal of Highway and Transport. Review on China's traffic engineering research progress: 2016[J]. China Journal of Highway and Transport, 2016, 29(6): 1-161. (in Chinese) [2] 郭延永, 刘佩, 袁泉, 等. 网联自动驾驶车辆道路交通安全研究综述[J]. 交通运输工程学报, 2023, 23(5): 19-38. doi: 10.19818/j.cnki.1671-1637.2023.03.018GUO Yan-yong, LIU Pei, YUAN Quan, et al. Review on research of road traffic safety of connected and automated vehicles[J]. Journal of Traffic and Transportation Engineering, 2023, 23(5): 19-38. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2023.03.018 [3] PAPAGEORGIOU M, HADJ-SALEM H, MIDDELHAM F. ALINEA local ramp metering: summary of field results[J]. Transportation Research Record, 1997, 1603(1): 90-98. doi: 10.3141/1603-12 [4] SUN X, HOROWITZ R. A localized switching ramp-metering controller with a queue length regulator for congested freeways[C]//IEEE. 2005 American Control Conference. New York: IEEE, 2005: 2141-2146. [5] WU J, MCDONALD M, CHATTERJEE K. A detailed evaluation of ramp metering impacts on driver behaviour[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2007, 10(1): 61-75. doi: 10.1016/j.trf.2006.06.003 [6] LIN P, KANG K, CHANG G. Exploring the effectiveness of variable speed limit controls on highway work-zone operations[J]. Journal of Intelligent Transportation Systems, 2004, 8(3): 155-168. doi: 10.1080/15472450490492851 [7] ABDEL-ATY M, DILMORE J, DHINDSA A. Evaluation of variable speed limits for real-time freeway safety improvement[J]. Accident Analysis and Prevention, 2006, 38(2): 335-345. doi: 10.1016/j.aap.2005.10.010 [8] 李志斌, 金茂菁, 刘攀, 等. 提高高速公路通行效率的可变限速控制策略[J]. 吉林大学学报(工学版), 2013, 43(5): 1204-1209.LI Zhi-bin, JIN Mao-jing, LIU Pan, et al. Evaluation of impact variable speed limits on improving traffic efficiency on freeways[J]. Journal of Jilin University (Engineering and Technology Edition), 2013, 43(5): 1204-1209. (in Chinese) [9] XU Ling-hui, LU Jia, RAN Bin, et al. Cooperative merging strategy for connected vehicles at highway on-ramps[J]. Journal of Transportation Engineering, Part A: Systems, 2019, 145(6): 04019022. doi: 10.1061/JTEPBS.0000243 [10] MIN Hai-gen, FANG Yu-kun, WU Xia, et al. On-ramp merging strategy for connected and automated vehicles based on complete information static game[J]. Journal of Traffic and Transportation Engineering (English Edition), 2021, 8(4): 582-595. doi: 10.1016/j.jtte.2021.07.003 [11] LOZANO DOMÍNGUEZ J M, MATEO SANGUINO T J. Review on V2X, I2X, and P2X communications and their applications: a comprehensive analysis over time[J]. Sensors, 2019, 19(12): 2756. doi: 10.3390/s19122756 [12] MARINESCU D, AČG URN J, BOUROCHE M, et al. On-ramp traffic merging using cooperative intelligent vehicles: a slot-based approach[C]//IEEE. 2012 15th International IEEE Conference on Intelligent Transportation Systems. New York: IEEE, 2012: 900-906. [13] PARK H, BHAMIDIPATI C S, SMITH B L. Development and evaluation of enhanced intellidrive-enabled lane changing advisory algorithm to address freeway merge conflict[J]. Transportation Research Record, 2011, 2243(1): 146-157. doi: 10.3141/2243-17 [14] KARBALAIEALI S, OSMAN O A, ISHAK S. A dynamic adaptive algorithm for merging into platoons in connected automated environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(10): 4111-4122. doi: 10.1109/TITS.2019.2938728 [15] DING J, LI L, PENG H, et al. A rule-based cooperative merging strategy for connected and automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(8): 3436-3446. doi: 10.1109/TITS.2019.2928969 [16] 高志军, 王江锋, 陈磊, 等. 基于智能网联车辆编队的高速公路协同合流控制方法[J]. 东南大学学报(自然科学版), 2022, 52(2): 335-343.GAO Zhi-Jun, WANG Jiang-feng, CHEN Lei, et al. Cooperative merging control on freeway based on platooning of connected and automated vehicles[J]. Journal of Southeast University (Natural Science Edition), 2022, 52(2): 335-343. (in Chinese) [17] 杨敏, 王立超, 张健, 等. 面向智慧高速的合流区协作车辆冲突解脱协调方法[J]. 交通运输工程学报, 2020, 20(3): 217-224. doi: 10.19818/j.cnki.1671-1637.2020.03.020YANG Min, WANG Li-chao, ZHANG Jian, et al. Collaborative method of vehicle conflict resolution in merging area for intelligent expressway[J]. Journal of Traffic and Transportation Engineering, 2020, 20(3): 217-224. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2020.03.020 [18] HANG Peng, LYU Chen, HUANG Chao, et al. Cooperative decision making of connected automated vehicles at multi-lane merging zone: a coalitional game approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(4): 3829-3841. doi: 10.1109/TITS.2021.3069463 [19] 郝威, 龚雅馨, 张兆磊, 等. 面向高速公路混合交通流的车辆协同合流策略[J]. 交通运输系统工程与信息, 2023, 23(1): 224-235.HAO Wei, GONG Ya-Xin, ZHANG Zhao-lei, et al. Cooperative merging strategy for freeway ramp in a mixed traffic environment[J]. Journal of Transportation Systems Engineering and Information Technology, 2023, 23(1): 224-235. (in Chinese) [20] RIOS-TORRES J, MALIKOPOULOS A, PISU P. Online optimal control of connected vehicles for efficient traffic flow at merging roads[C]//IEEE. 2015 18th International Conference on Intelligent Transportation Systems. New York: IEEE, 2015: 2432-2437. [21] LETTER C, ELEFTERIADOU L. Efficient control of fully automated connected vehicles at freeway merge segments[J]. Transportation Research Part C: Emerging Technologies, 2017, 80: 190-205. doi: 10.1016/j.trc.2017.04.015 [22] HU X, SUN J. Trajectory optimization of connected and autonomous vehicles at a multilane freeway merging area[J]. Transportation Research Part C: Emerging Technologies, 2019, 101: 111-125. doi: 10.1016/j.trc.2019.02.016 [23] 刘畅, 庄伟超, 殷国栋, 等. 高速匝道入口多智能网联车协同合流控制[J]. 东南大学学报(自然科学版), 2020, 50(5): 965-972.LIU Chang, ZHUANG Wei-chao, YIN Guo-dong, et al. Cooperative merging control of multiple connected and automated vehicles on freeway ramp[J]. Journal of Southeast University (Natural Science Edition), 2020, 50(5): 965-972. (in Chinese) [24] 江浩斌, 胡子牛, 刘擎超, 等. 智能网联汽车中心式匝道合流协同控制[J]. 湖南大学学报(自然科学版), 2021, 48(4): 159-170.JIANG Hao-bin, HU Zi-niu, LIU Qing-chao, et al. Centralized coordinated ramp merging control for intelligent and connected vehicles[J]. Journal of Hunan University(Natural Sciences), 2021, 48(4): 159-170. (in Chinese) [25] 王秋玲, 赵祥模, 徐志刚, 等. 特种CAV优先的集中式匝道合流协同控制方法[J]. 交通运输工程学报, 2022, 22(1): 263-272. doi: 10.19818/j.cnki.1671-1637.2022.01.022WANG Qiu-ling, ZHAO Xiang-mo, XU Zhi-gang, et al. Centralized ramp confluence cooperative control method with special connected and automated vehicle priority[J]. Journal of Traffic and Transportation Engineering, 2022, 22(1): 263-272. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2022.01.022 [26] DING Heng, DI Yun-ran, ZHENG Xiao-yan, et al. Automated cooperative control of multilane freeway merging areas in connected and autonomous vehicle environments[J]. Transportmetrica B: Transport Dynamics, 2021, 9(1): 437-455. doi: 10.1080/21680566.2021.1887774 [27] SHI Yan-jun, YU Hao, GUO Yi-jia, et al. A collaborative merging strategy with lane changing in multilane freeway on-ramp area with V2X network[J]. Future Internet, 2021, 13(5): 123. doi: 10.3390/fi13050123 [28] WANG Z, WU G, BARTH M. Distributed consensus-based cooperative highway on-ramp merging using V2X communications[C]//SAE International. 2018 SAE World Congress Experience. Warrendale: SAE International, 2018: 1-9. [29] ERDMANN J. SUMO's lane-changing model[C]//Springer. 2014 2nd SUMO Conference. Berlin: Springer, 2015: 105-123. [30] XIE Yuan-chang, ZHANG Hui-xing, GARTNER N H, et al. Collaborative merging strategy for freeway ramp operations in a connected and autonomous vehicles environment[J]. Journal of Intelligent Transportation Systems, 2017, 21(2): 136-147. doi: 10.1080/15472450.2016.1248288 -


 点击查看大图
点击查看大图
计量
- 文章访问数: 236
- HTML全文浏览量: 87
- PDF下载量: 91
- 被引次数: 0
