

-
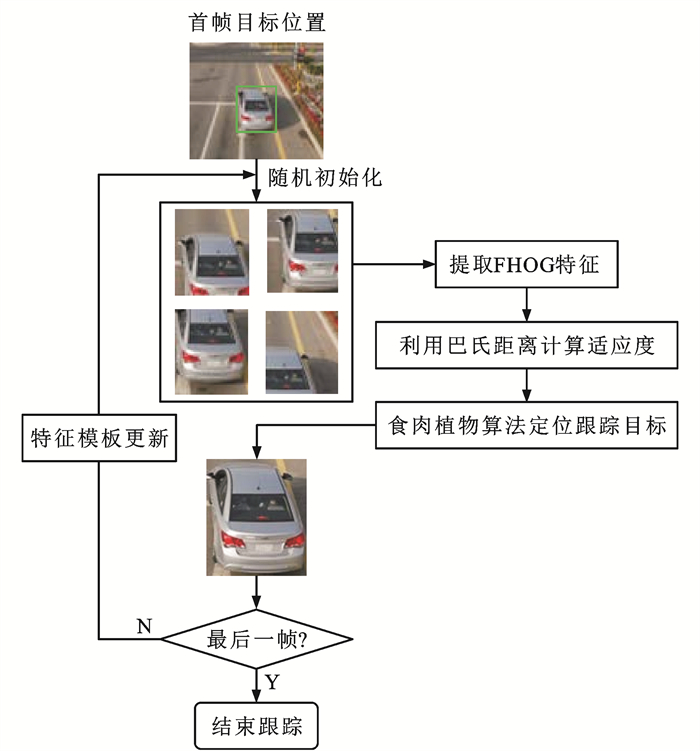
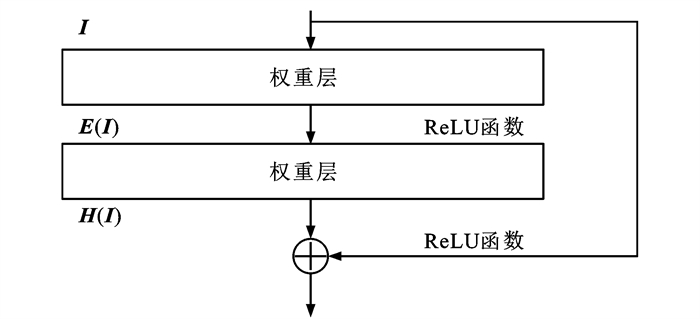
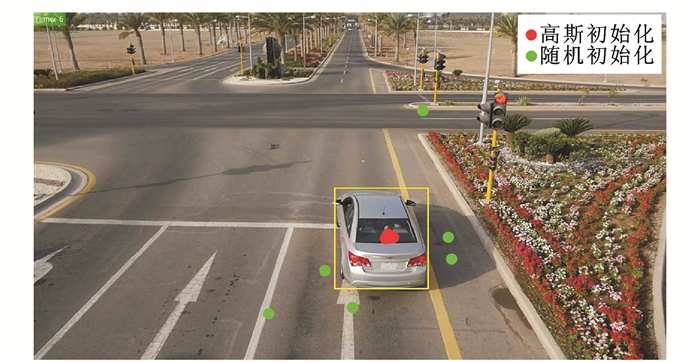
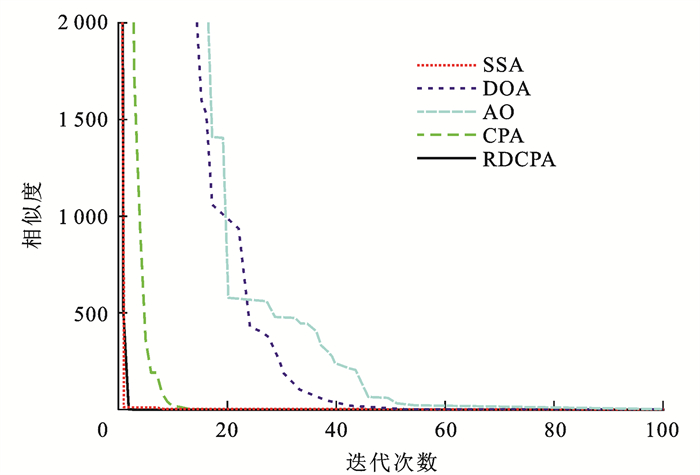
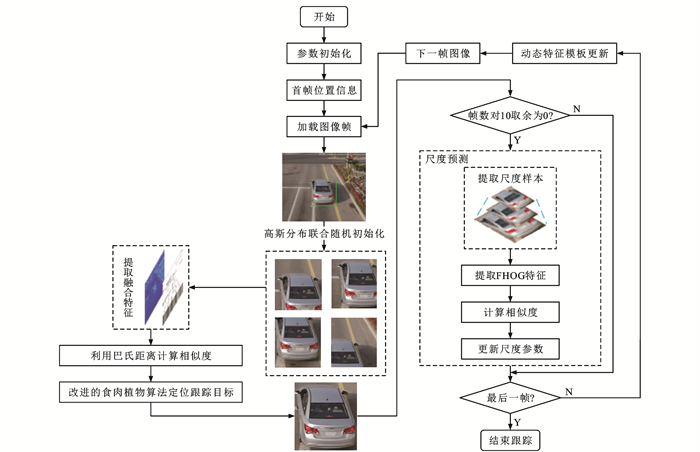
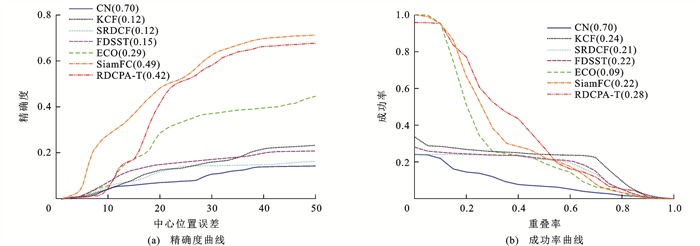
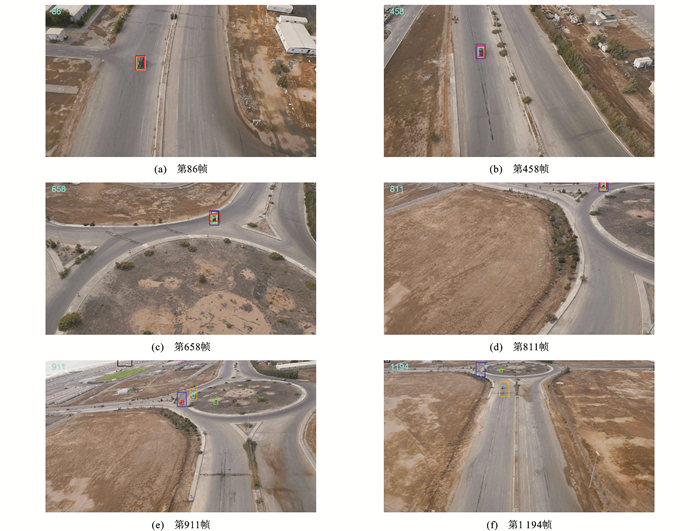
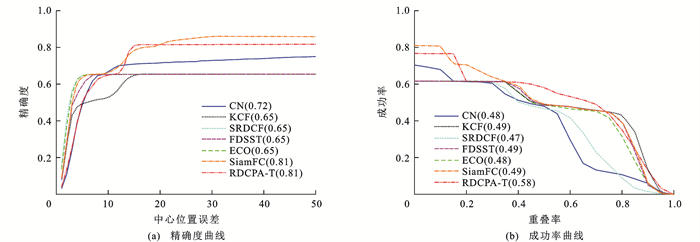
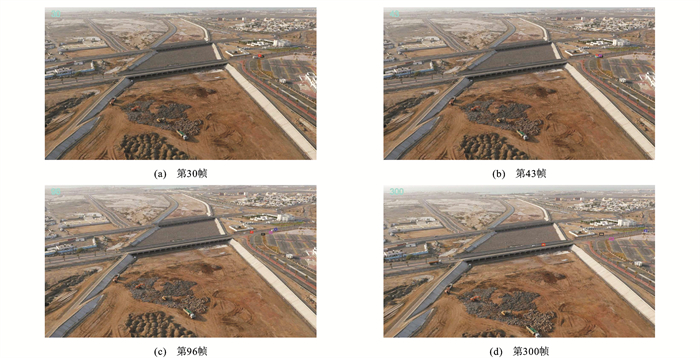
摘要: 研究了群体智能算法与目标跟踪相关的机理,提取了跟踪区域快速方向梯度直方图(FHOG)作为特征模板,利用食肉植物算法在图像搜索区域搜寻目标位置,基于巴氏距离作为模板匹配的相似度函数设计了一种食肉植物算法跟踪框架;考虑到实际跟踪过程的遮挡、背景杂乱等复杂状况,设计了一种短期记忆模块来预测跟踪过程中食肉植物算法的初始化个体,该模块采用高斯分布方式,利用视频序列前2帧中目标位置来预测运动轨迹;为更好地利用食肉植物算法优化目标跟踪,在迭代过程中设计了一种随机跟随策略与种群划分机制,并作为搜索策略引入跟踪框架中;为弥补方向梯度直方图单特征对目标的表述能力不强的问题,在FHOG基础上融合了ResNet-50中的Conv2-1与Conv4-1两层特征,并在融合特征的基础上设计了一种自适应学习率动态更新模板;在种群维度上添加二维比例感知因子,使得目标窗口的长宽比各自变化,更好适应目标窗口的尺度变化。研究结果表明: 随机跟随策略和种群划分机制的引入显著改善了食肉植物算法的迭代速度和寻优能力;融合特征和自适应模板更新增强了目标特征表述能力, 解决了由于遮挡等情况学习到大量无效信息,从而导致特征模板退化的问题;算法在跟踪UAV123中几个具有挑战性的车辆视频序列时性能优越,精确度和成功率分别为0.81和0.58,速度为每秒11.05帧;与同类算法相比,跟踪精度和鲁棒性均有大幅提升,能够适应复杂场景中的环境变化,对目标车辆长期保持稳定跟踪。Abstract: The mechanism of the swarm intelligence (SI) algorithm related to target tracking was studied. The fast histogram of oriented gradients (FHOG) of the tracking region was extracted as a feature template, and a carnivorous plant algorithm (CPA) was employed to search for the target's position in the image search region. A tracking framework based on the CPA was designed using the Bhattacharyya distance as the similarity function for template matching. Considering the complexity situations in the actual tracking process, such as the occlusion and busy background, a short-term memory module was designed to predict the individual initialized by the CPA during the tracking. This module, utilizing a Gaussian distribution, predicted the motion trajectory according to the target's position in the first two frames of the video sequence. To better optimize the target tracking with the CPA, a random tracking strategy and a population division mechanism were developed in the iterative process and integrated into the tracking framework as a search strategy. To make up for the poor representation ability of the single feature of the target by the FHOG, Conv2-1 and Conv4-1 features of ResNet-50 were integrated on the basis of the FHOG. A dynamic update template of the adaptive learning rate was designed based on this fused feature. A two-dimensional scale perception factor was added to the population dimension, allowing the aspect ratio of the target window to vary, so as to better adapt to the change in the scale of the target window. Analysis results show that the introduction of the random tracking strategy and population division mechanism significantly improves the iteration speed and optimization capability of the CPA. The fused feature and adaptive template update enhance the representation of target features, addressing the issues related to learning abundant irrelevant information due to the occlusion and preventing feature template degradation. The proposed algorithm demonstrates notable performance in tracking challenging vehicle video sequences from UAV123. The precision and success rate are 0.81 and 0.58, respectively, with a speed of 11.05 frames per second. Compared with the algorithms in similar literature, the tracking accuracy and robustness of the proposed algorithm improves substantially, making it adaptable to environmental change in complex scenes and ensuring a stable long-term tracking of target vehicles.
-
表 1 各算法测试结果
Table 1. Test results of each algorithm
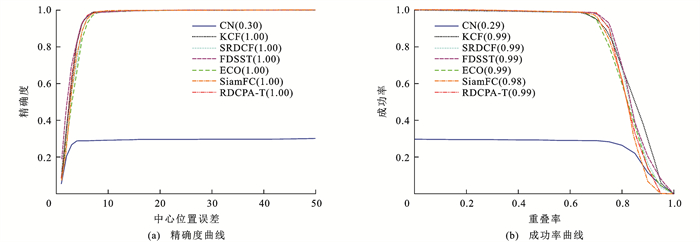
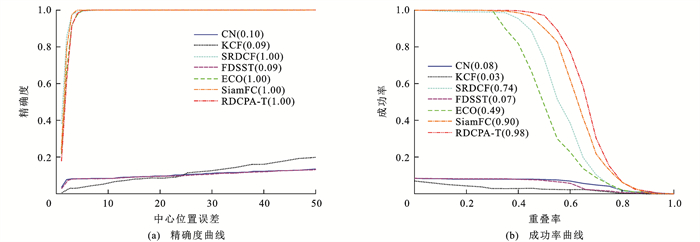
算法 成功率 精确度 每秒帧数 RDCPA-T 0.58 0.81 11.05 CN 0.36 0.40 477.00 KCF 0.37 0.39 788.00 SRDCF 0.50 0.60 10.71 FDSST 0.45 0.50 165.00 SiamFC 0.57 0.80 4.68 ECO 0.45 0.64 11.53  下载: 导出CSV
下载: 导出CSV
-
[1] HASSABALLAH M, KENK M A, MUHAMMAD K, et al. Vehicle detection and tracking in adverse weather using a deep learning framework[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(7): 4230-4242. [2] 杨彪, 闫国成, 刘占文, 等. 基于异构图学习的交通场景运动目标感知[J]. 交通运输工程学报, 2022, 22(3): 238-250.YANG Biao, YAN Guo-cheng, LIU Zhan-wen, et al. Perception of moving objects in traffic scenes based on heterogeneous graph learning[J]. Journal of Traffic and Transportation Engineering, 2022, 22(3): 238-250. (in Chinese) [3] FIAZ M, MAHMOOD A, JAVED S, et al. Handcrafted and deep trackers: recent visual object tracking approaches and trends[J]. ACM Computing Surveys, 2019, 52(2): 1-44. [4] ALTAN A, HACIOGLU R. Model predictive control of three-axis gimbal system mounted on UAV for real-time target tracking under external disturbances[J]. Mechanical Systems and Signal Processing, 2020, 138: 106548. doi: 10.1016/j.ymssp.2019.106548 [5] BOLME D S, BEVERIDGE J R, DRAPER B A, et al. Visual object tracking using adaptive correlation filters[C]// IEEE. Proceedings of the 2010 IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2010: 2544-2550. [6] DANELLJAN M, KHAN F S, FELSBERG M, et al. Adaptive color attributes for real-time visual tracking[C]// IEEE. Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2014: 1090-1097. [7] HENRIQUES J F, CASEIRO R, MARTINS P, et al. High- speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(3): 583-596. doi: 10.1109/TPAMI.2014.2345390 [8] DANELLJAN M, HAGER G, SHAHBAZ K F, et al. Learning spatially regularized correlation filters for visual tracking[C]//IEEE. Proceedings of the IEEE International Conference on Computer Vision. New York: IEEE, 2015: 4310-4318. [9] DANELLJAN M, HAGER G, KHAN F S, et al. Discriminative scale space tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 39(8): 1561-1575. [10] DANELLJAN M, BHAT G, SHAHBAZ K F, et al. ECO: efficient convolution operators for tracking[C]//IEEE. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2017: 6638-6646. [11] WANG Nai-yan, YEUNG D Y. Learning a deep compact image representation for visual tracking[J]. Advances in Neural Information Processing Systems, 2013, 26: 1-9. [12] NAM H, HAN B. Learning multi-domain convolutional neural networks for visual tracking[C]// IEEE. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2016: 4293-4302. [13] BERTINETTO L, VALMADRE J, HENRIQUES J F, et al. Fully-convolutional Siamese networks for object tracking[C]//Springer. Proceedings of 2016 European Conference on Computer Vision. Berlin: Springer, 2016: 850-865. [14] LI Bo, YAN Jun-jie, WU Wei, et al. High performance visual tracking with Siamese region proposal network[C]//IEEE. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2018: 8971-8980. [15] LI Bo, WU Wei, WANG Qiang, et al. SiamRPN++ : evolution of siamese visual tracking with very deep net-works[C]// IEEE. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2019: 4282-4291. [16] HE Kai-ming, ZHANG Xiang-yu, REN Shao-qing, et al. Deep residual learning for image recognition[C]// IEEE. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2016: 770-778. [17] XU Yin-da, WANG Ze-yu, LI Zuo-xin, et al. SiamFC++ : towards robust and accurate visual tracking with target estimation guidelines[C]//AAAI. Proceedings of the 2020 AAAI Conference on Artificial Intelligence. New York: AAAI, 2020: 12549-12556. [18] ZHANG Zhi-peng, PENG Hou-wen, FU Jian-long, et al. Ocean: object-aware anchor-free tracking[C]//Springer. Proceedings of 2020 European Conference on Computer Vision. Berlin: Springer, 2020: 771-787. [19] SZEGEDY C, LIU Wei, JIA Yang-qing, et al. Going deeper with convolutions[C]//IEEE. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2015: 1-9. [20] 黄鹤, 李文龙, 吴琨, 等. 基于ALCE-SSA优化的三维无人机低空突防[J]. 南京大学学报(自然科学), 2022, 58(3): 448-459.HUANG He, LI Wen-long, WU Kun, et al. 3D UAV low altitude penetration optimization based on ALCE-SSA[J]. Journal of Nanjing University (Natural Science), 2022, 58(3): 448-459. (in Chinese) [21] ONG K M, ONG P, SIA C K, et al. Effective moving object tracking using modified flower pollination algorithm for visible image sequences under complicated background[J]. Applied Soft Computing, 2019, 83: 105625. doi: 10.1016/j.asoc.2019.105625 [22] NENAVATH H, JATOTH R K. Hybrid SCA-TLBO: a novel optimization algorithm for global optimization and visual tracking[J]. Neural Computing and Applications, 2019, 31(9): 5497-5526. doi: 10.1007/s00521-018-3376-6 [23] ZHANG Huang-long, GAO Zeng, ZHANG Jie, et al. Hybridizing extended ant lion optimizer with sine cosine algorithm approach for abrupt motion tracking[J]. EURASIP Journal on Image and Video Processing, 2020, 2020(1): 1-18. doi: 10.1186/s13640-020-0490-z [24] ONG P, CHONG T K, ONG K M, et al. Tracking of moving athlete from video sequences using flower pollination algorithm[J]. The Visual Computer, 2022, 38(3): 939-962. doi: 10.1007/s00371-021-02060-2 [25] 黄鹤, 李文龙, 吴琨, 等. 动态自适应特征融合的MFOPA跟踪器[J]. 电子学报, 2023, 51(5): 1350-1358.HUANG He, LI Wen-long, WU Kun, et al. MFOPA tracker with dynamic adaptive feature fusion[J]. Acta Electronica Sinica, 2023, 51(5): 1350-1358. (in Chinese) [26] ONG K M, ONG P, SIA C K. A carnivorous plant algorithm for solving global optimization problems[J]. Applied Soft Computing, 2021, 98: 106833. [27] GACAV C, BENLIGIRAY B, ÖZKAN K, et al. Facial expression recognition with FHOG features[C]//IEEE. 2018 26th Signal Processing and Communications Applications Conference (SIU). New York: IEEE, 2018: 1-4. [28] PERAZA-VAZQUEZ H, PENA-DELGADO A F, ECHAVARRIA-CASTILLO G, et al. A bio-inspired method for engineering design optimization inspired by dingoes hunting strategies[J]. Mathematical Problems in Engineering, 2021, 2021: 1-19. [29] ABUALIGAH L, YOUSRI D, ABD E M, et al. Aquila optimizer: a novel meta-heuristic optimization algorithm[J]. Computers and Industrial Engineering, 2021, 157: 107250. [30] MUELLER M, SMITH N, GHANEM B. A benchmark and simulator for UAV tracking[C]//Springer. Proceedings of 2016 European Conference on Computer Vision. Berlin: Springer, 2016: 445-461. [31] FAN H, LIN L, YANG F, et al. LaSOT: a high-quality benchmark for large-scale single object tracking[C]//IEEE. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2019: 5374-5383. -


 点击查看大图
点击查看大图
图(23) / 表(1)
计量
- 文章访问数: 134
- HTML全文浏览量: 20
- PDF下载量: 56
- 被引次数: 0
