

Adjacent cross-coupling synchronous formation control with collision avoidance for multiple ships under unknown disturbances
-
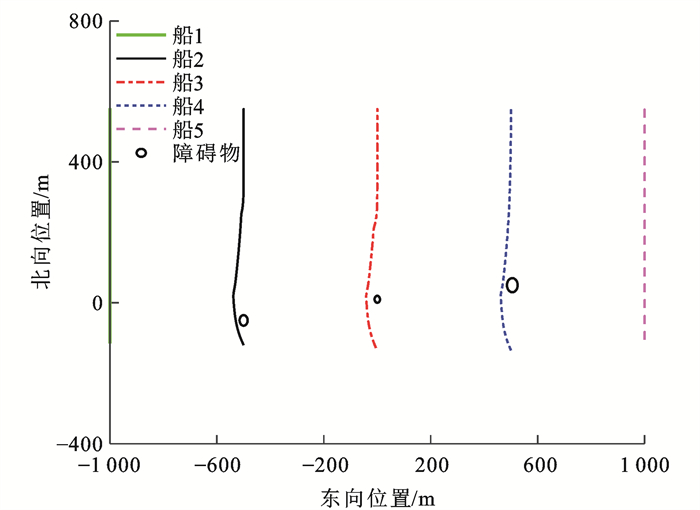
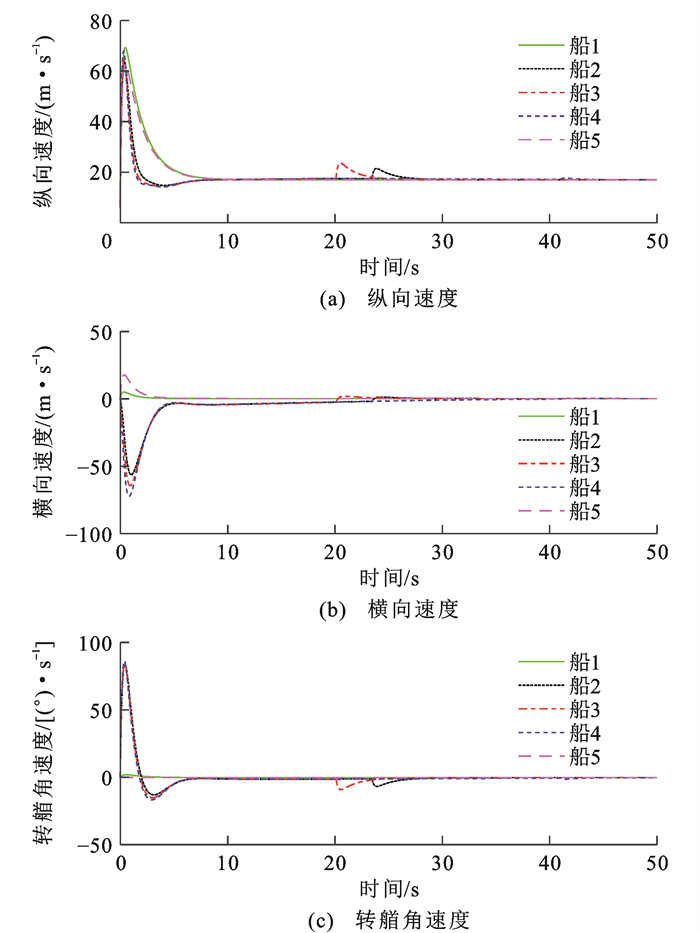
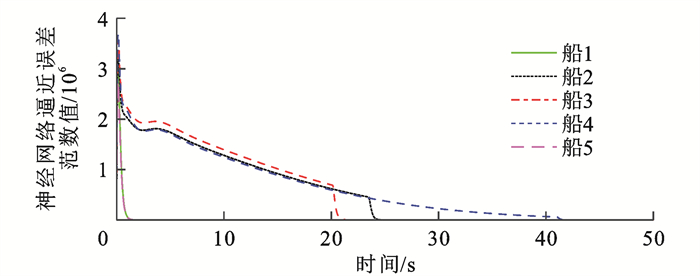
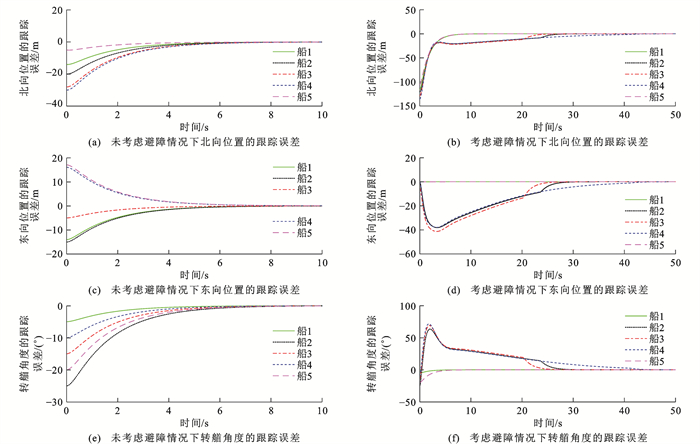
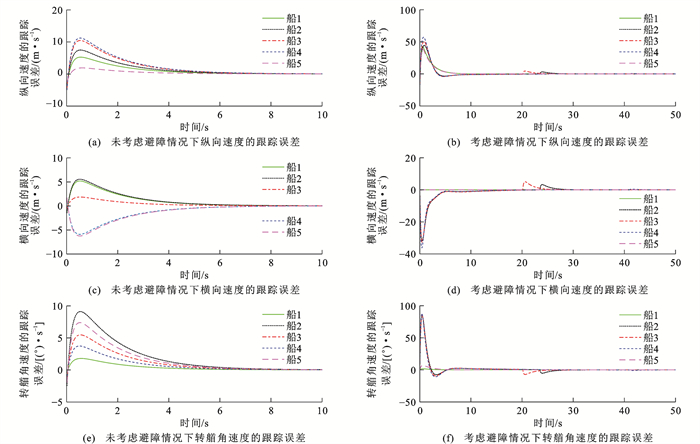
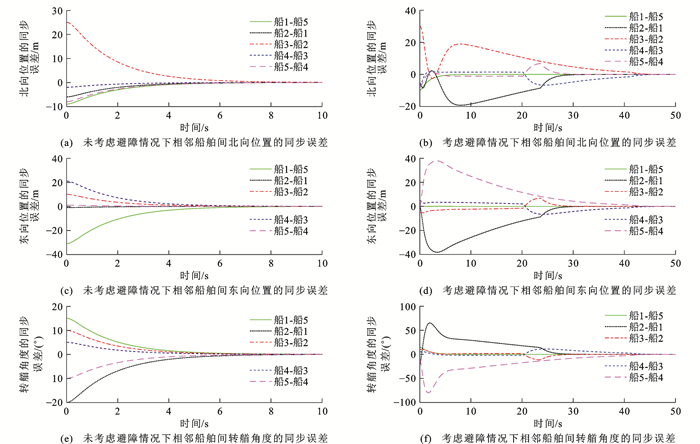
摘要: 针对在未知海洋干扰下编队航行时的同步性能差和障碍物碰撞风险问题,提出了一种多船舶分布式相邻交叉耦合同步编队避障鲁棒控制方法和具有更高同步控制精度的相邻交叉耦合同步控制策略, 并利用神经网络估计未知海洋干扰;为防止船舶与障碍物、船舶与船舶之间的碰撞风险,将人工势场法应用到多船舶编队控制系统当中;通过模拟5艘船舶在具有多个障碍物和未知海洋干扰情况下的并排编队航行场景,测试了提出方法的有效性。研究结果表明:在考虑障碍物与外界海洋干扰的环境下,5艘船舶在安全躲避障碍物后,均能够以期望的编队形式完成航行;9 s左右这些船舶就能够达到一致的速度,面对障碍物干扰时,速度会出现轻微波动,但30 s后仍可趋于一致,并保持相同的速度继续航行;船舶的位置跟踪误差、速度跟踪误差、相邻船舶的位置同步误差与神经网络逼近误差会出现小幅度的振荡,但30 s后这些误差最终都收敛于0,保证了5艘船舶位置与速度信息的同步。可见,该方法不仅可解决未知海洋干扰下船舶编队控制同步性能较差的问题,同时可有效降低船舶与障碍物、船舶与船舶之间的碰撞风险,一定程度上提高了船舶编队航行时的自主性与安全性。Abstract: In view of the poor synchronization performance and obstacle collision risk during formation navigation under unknown marine disturbances, a distributed adjacent cross-coupling synchronous formation robust control method with collision avoidance was proposed for multiple ships, and an adjacent cross-coupling synchronous control strategy was proposed to achieve higher synchronous control accuracy, and the unknown marine disturbances were estimated by the neural network. In order to effectively prevent collision risks between ships and obstacles, as well as between ships, the artificial potential field method was applied to the multi-ship formation control system. The effectiveness of the proposed method was tested by simulating the parallel formation navigation scenarios of five ships facing multiple obstacles and unknown marine disturbances. Research results show that all ships can navigate in the expected formation after safely avoiding the obstacles in considering obstacles and external marine disturbances. After about 9 s, the ships can reach consistent velocities. Although the velocities of the ships fluctuate slightly when there are obstacles, the ships are able to continue navigating with consistent velocity after 30 s. Besides, there also exist small oscillations in the position and velocity tracking errors, position synchronization errors of adjacent ships, and neural network approximation errors. However, these errors can eventually converge to 0 after 30 s, ensuring the synchronization of the position and velocity information of the five ships. Therefore, the proposed method can not only solve the problem of poor synchronization performance when ships are sailing in formation under unknown marine disturbances, but also effectively reduce the collision risk between ships and obstacles, as well as between ships. To some extent, the autonomy and safety of the ships during formation navigation have been improved.
-

图 7 同步编队鲁棒控制的位置跟踪误差曲线
Figure 7. Position tracking error curves of synchronous formation robust control

图 8 同步编队鲁棒控制的速度跟踪误差曲线
Figure 8. Velocity tracking error curves of synchronous formation robust control

图 9 同步编队鲁棒控制作用下的相邻船舶同步误差曲线
Figure 9. Synchronous error curves of adjacent ships of synchronous formation robust control
-
[1] PENG Zhou-hua, WANG Jun, WANG Dan, et al. An overview of recent advances in coordinated control of multiple autonomous surface vehicles[J]. IEEE Transactions on Industrial Informatics, 2021, 17(2): 732-745. doi: 10.1109/TII.2020.3004343 [2] 陆宇. 面向多船协同的自适应编队控制方法研究[D]. 上海: 上海交通大学, 2022.LU Yu. Adaptive formation control for the cooperation of autonomous surface vehicles[D]. Shanghai: Shanghai Jiao Tong University, 2022. (in Chinese) [3] 柳晨光, 初秀民, 吴青, 等. USV发展现状及展望[J]. 中国造船, 2014, 55(4): 194-205. doi: 10.3969/j.issn.1000-4882.2014.04.024LIU Chen-guang, CHU Xiu-min, WU Qing, et al. A review and prospect of USV research[J]. Shipbuilding of China, 2014, 55(4): 194-205. (in Chinese) doi: 10.3969/j.issn.1000-4882.2014.04.024 [4] 侯瑞超, 唐智诚, 王博, 等. 水面无人艇智能化技术的发展现状和趋势[J]. 中国造船, 2020, 61(增1): 211-220.HOU Rui-chao, TANG Zhi-cheng, WANG Bo, et al. Development status and trend of intelligent technology for unmanned surface vehicles[J]. Shipbuilding of China, 2020, 61(S1): 211-220. (in Chinese) [5] 柳晨光, 贺治卜, 初秀民, 等. 船舶编队控制综述[J]. 交通运输工程学报, 2022, 22(4): 10-27. doi: 10.19818/j.cnki.1671-1637.2022.04.002LIU Chen-guang, HE Zhi-bo, CHU Xiu-min, et al. Overview on ship formation control[J]. Journal of Traffic and Transportation Engineering, 2022, 22(4): 10-27. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2022.04.002 [6] TUO Yu-long, WANG Sha-sha, PENG Zhou-hua, et al. Reliability-based fixed-time nonsingular terminal sliding mode control for dynamic positioning of turret-moored vessels with uncertainties and unknown disturbances[J]. Ocean Engineering, 2022, 248: 110748. doi: 10.1016/j.oceaneng.2022.110748 [7] LIANG Xiao, QU Xing-ru, WANG Ning, et al. A novel distributed and self-organized swarm control framework for underactuated unmanned marine vehicles[J]. IEEE Access, 2019, 7: 112703-112712. doi: 10.1109/ACCESS.2019.2934190 [8] LU Yu, ZHANG Guo-qing, SUN Zhi-jian, et al. Adaptive cooperative formation control of autonomous surface vessels with uncertain dynamics and external disturbances[J]. Ocean Engineering, 2018, 167: 36-44. doi: 10.1016/j.oceaneng.2018.08.020 [9] 马雨飞. 基于确定学习方法的无人水面艇编队控制与学习研究[D]. 广州: 华南理工大学, 2020.MA Yu-fei. Formation control and learning of multiple unmanned surface vehicles based on deterministic learning method[D]. Guangzhou: South China University of Technology, 2020. (in Chinese) [10] FU Ming-yu, JIAO Jian-fang, YIN Shen. Robust coordinated formation for multiple surface vessels based on backstepping sliding mode control[J]. Abstract and Applied Analysis, 2013, 2013: 681319. [11] SUN Dong, WANG Can, SHANG Wen, et al. A synchronization approach to trajectory tracking of multiple mobile robots while maintaining time-varying formations[J]. IEEE Transactions on Robotics, 2009, 25(5): 1074-1086. doi: 10.1109/TRO.2009.2027384 [12] LI Le-bao, SUN Ling-ling, ZHANG Sheng-zhou. Mean deviation coupling synchronous control for multiple motors via second-order adaptive sliding mode control[J]. ISA Transactions, 2016, 62: 222-235. doi: 10.1016/j.isatra.2016.01.015 [13] 杨立炜, 付丽霞, 李萍. 多智能体系统编队控制发展综述[J]. 电子测量技术, 2020, 43(24): 18-27.YANG Li-wei, FU Li-xia, LI Ping. Summary of development of multi-agent system formation control[J]. Electronic Measurement Technology, 2020, 43(24): 18-27. (in Chinese) [14] ZHANG Ying, LI Xu. Leader-follower formation control and obstacle avoidance of multi-robot based on artificial potential field[C]//IEEE. The 27th Chinese Control and Decision Conference (2015 CCDC). New York: IEEE, 2015: 4355-4360. [15] DING Guo-hua, ZHU Da-qi, SUN Bing. Formation control and obstacle avoidance of multi-AUV for 3-D underwater environment[C]//IEEE. Proceedings of the 33rd Chinese Control Conference. New York: IEEE, 2014: 8347-8352. [16] ZHOU Ding-jiang, WANG Zi-jian, SCHWAGER M. Agile coordination and assistive collision avoidance for quadrotor swarms using virtual structures[J]. IEEE Transactions on Robotics, 2018, 34(4): 916-923. doi: 10.1109/TRO.2018.2857477 [17] CHEN Xuan-lin, HUANG Fang-hao, ZHANG You-gong, et al. A novel virtual-structure formation control design for mobile robots with obstacle avoidance[J]. Applied Sciences, 2020, 10(17): 5807. doi: 10.3390/app10175807 [18] LIN Jin-ling, HWANG K S, WANG Ya-ling. A simple scheme for formation control based on weighted behavior learning[J]. IEEE Transactions on Neural Networks and Learning Systems, 2014, 25(6): 1033-1044. doi: 10.1109/TNNLS.2013.2285123 [19] 徐肖豪, 李成功, 赵嶷飞, 等. 基于人工势场算法的改航路径规划[J]. 交通运输工程学报, 2009, 9(6): 64-68. doi: 10.19818/j.cnki.1671-1637.2009.06.013XU Xiao-hao, LI Cheng-gong, ZHAO Yi-fei, et al. Rerouting path planning based on artificial potential field algorithm[J]. Journal of Traffic and Transportation Engineering, 2009, 9(6): 64-68. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2009.06.013 [20] KHATIB O. Real-time obstacle avoidance system for manipulators and mobile robots[C]//IEEE. Proceedings of 1985 IEEE International Conference on Robotics and Automation. New York: IEEE, 2003: 500-505. [21] 郭银景, 刘琦, 鲍建康, 等. 基于人工势场法的AUV避障算法研究综述[J]. 计算机工程与应用, 2020, 56(4): 16-23.GUO Yin-jing, LIU Qi, BAO Jian-kang, et al. Overview of AUV obstacle avoidance algorithm based on artificial potential field method[J]. Journal of Computer Engineering and Applications, 2020, 56(4): 16-23. (in Chinese) [22] 刘琨, 张永辉, 任佳. 基于改进人工势场法的无人船路径规划算法[J]. 海南大学学报(自然科学版), 2016, 34(2): 99-104.LIU Kun, ZHANG Yong-hui, REN Jia. Path planning algorithm for unmanned surface vehicle based on an improved artificial potential field method[J]. Natural Science Journal of Hainan University, 2016, 34(2): 99-104. (in Chinese) [23] LAZAROWSKA A. A new potential field inspired path planning algorithm for ships[C]//IEEE. 2018 23rd International Conference on Methods and Models in Automation and Robotics (MMAR). New York: IEEE, 2018: 166-170. [24] LYU Hong-guang, YIN Yong. Ship's trajectory planning for collision avoidance at sea based on modified artificial potential field[C]//IEEE. 2017 2nd International Conference on Robotics and Automation Engineering (ICRAE). New York: IEEE, 2018: 351-357. [25] 迟岑. 基于机器学习的无人艇自主避碰方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2016.CHI Cen. Research on autonomous collision avoidance method of USV based on machine learning method[D]. Harbin: Harbin Engineering University, 2016. (in Chinese) [26] WANG Jia, WU Xiao-bei, XU Zhi-liang. Decentralized formation control and obstacles avoidance based on potential field method[C]//IEEE. 2006 International Conference on Machine Learning and Cybernetics. New York: IEEE, 2009: 803-808. [27] WANG Yi-fan, SUN Xing-yan. Formation control of multi-UAV with collision avoidance using artificial potential field[C]// IEEE. 2019 11th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC). New York: IEEE, 2019: 296-300. [28] 徐玉杰. 多动力定位船避碰控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2018.XU Yu-jie. Research on collision avoidance control methods for multiple dynamic positioning ships[D]. Harbin: Harbin Engineering University, 2018. (in Chinese) [29] 王永军, 郑丽. 关于Young不等式和Schwarz不等式的证明[J]. 数学学习与研究, 2020(26): 145-147.WANG Yong-jun, ZHENG Li. Proof of the Young inequality and the Schwarz inequality[J]. Mathematics Learning and Research, 2020(26): 145-147. (in Chinese) -

 下载:
下载:
 点击查看大图
点击查看大图
图(10)
计量
- 文章访问数: 118
- HTML全文浏览量: 30
- PDF下载量: 48
- 被引次数: 0
