2021 Vol. 21, No. 2
Display Method:
























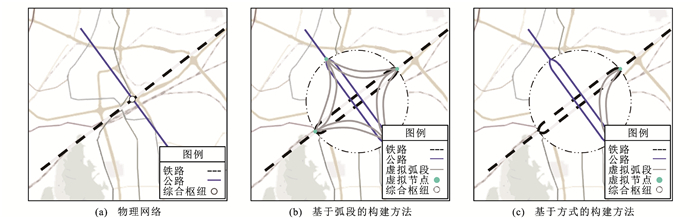
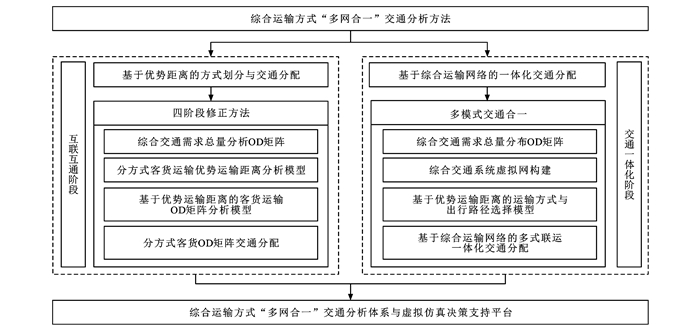
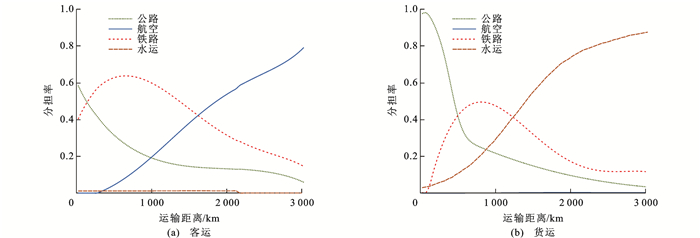
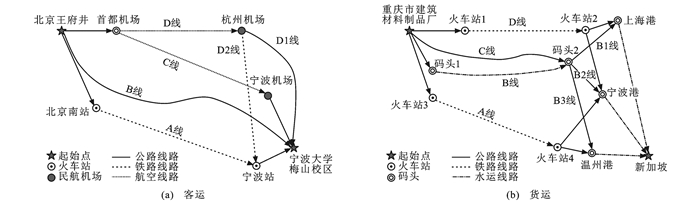
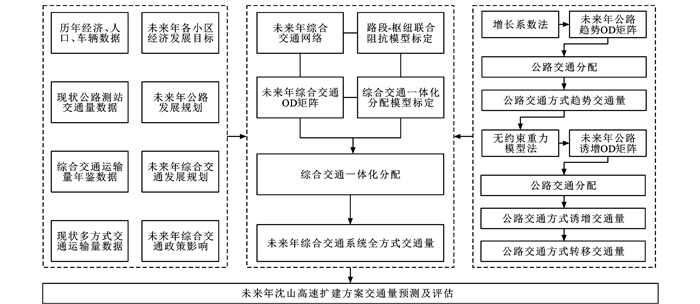
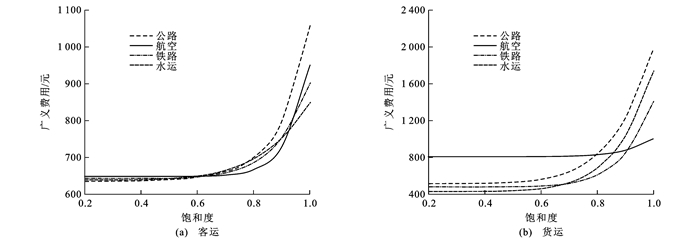
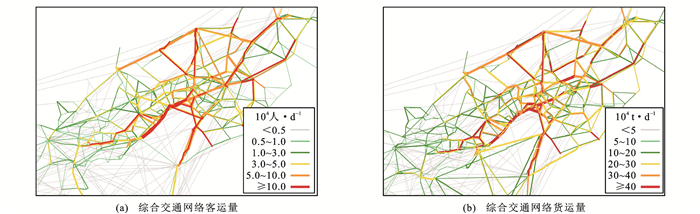
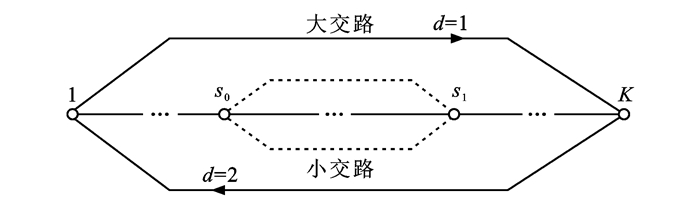
Multi-network integrated traffic analysis model and algorithm of comprehensive transportation system
Abstract:
2021, 21(2): 159-172.
doi: 10.19818/j.cnki.1671-1637.2021.02.014

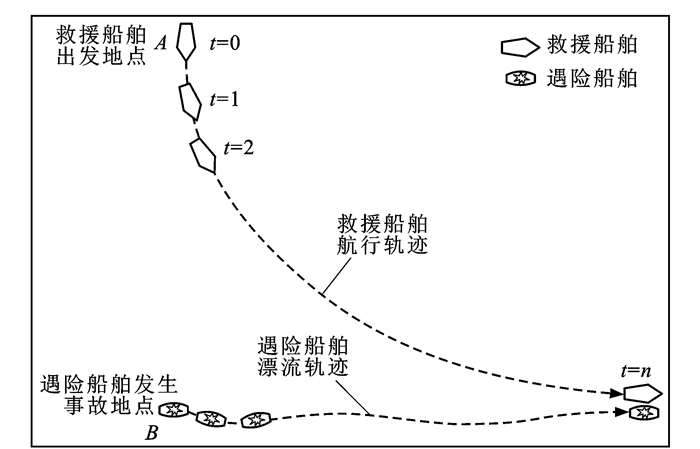
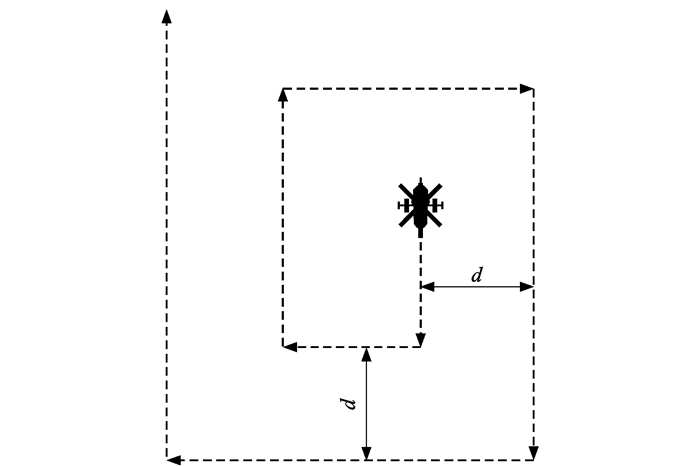
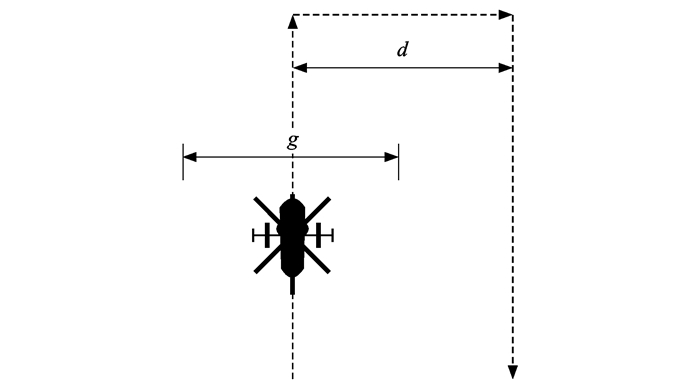
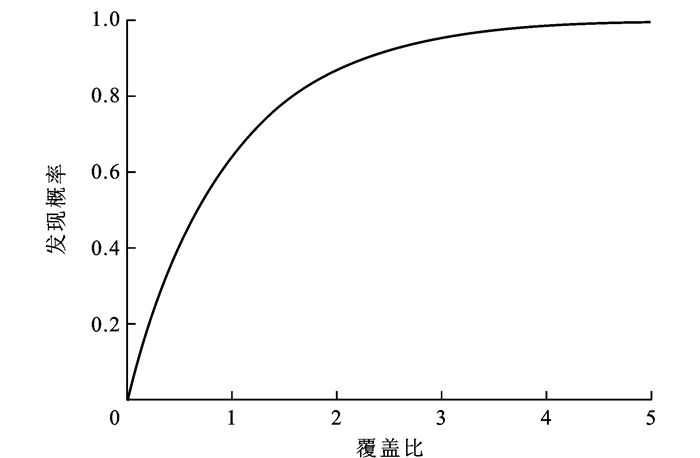
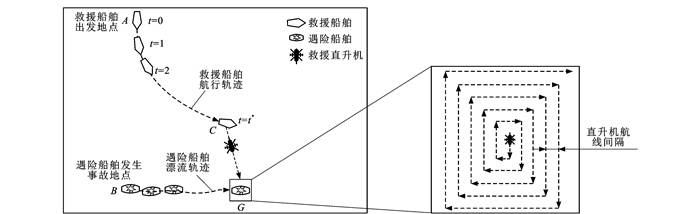
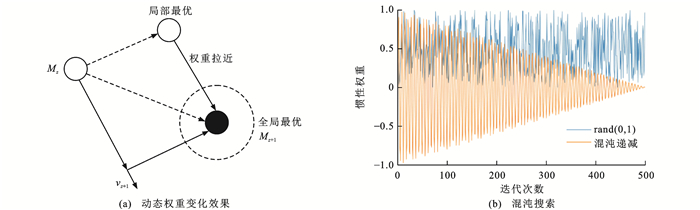
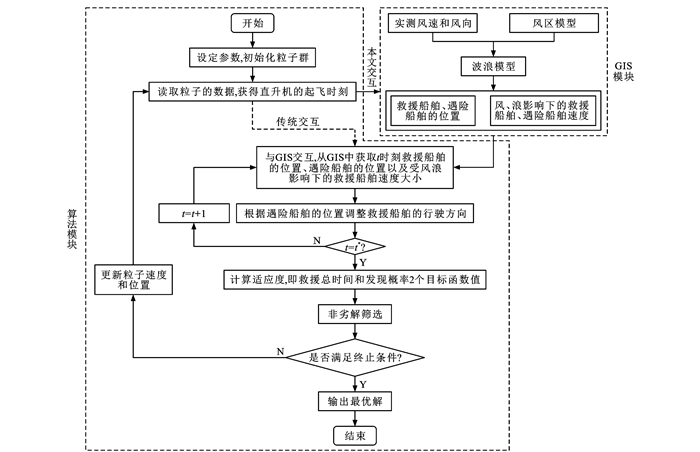
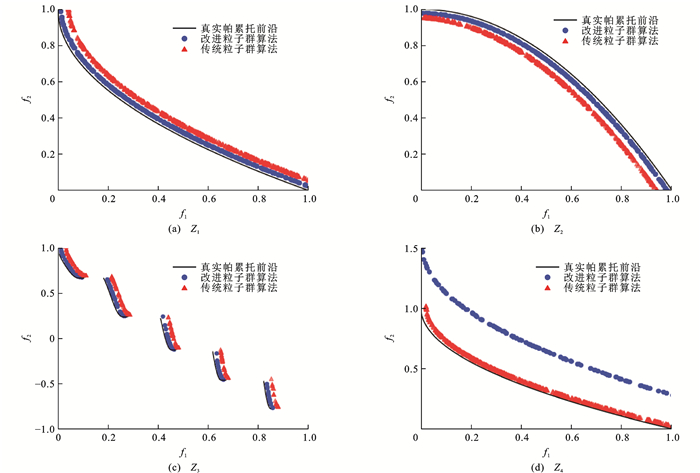
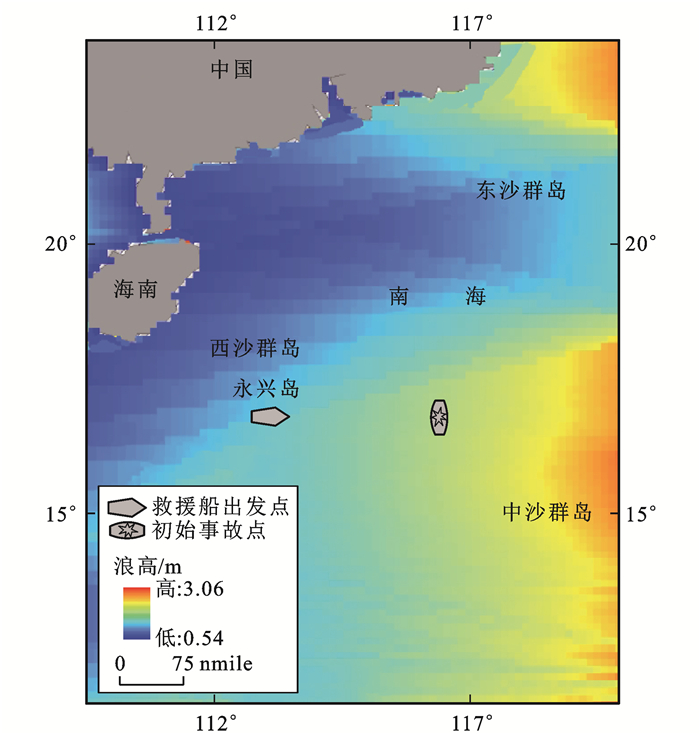
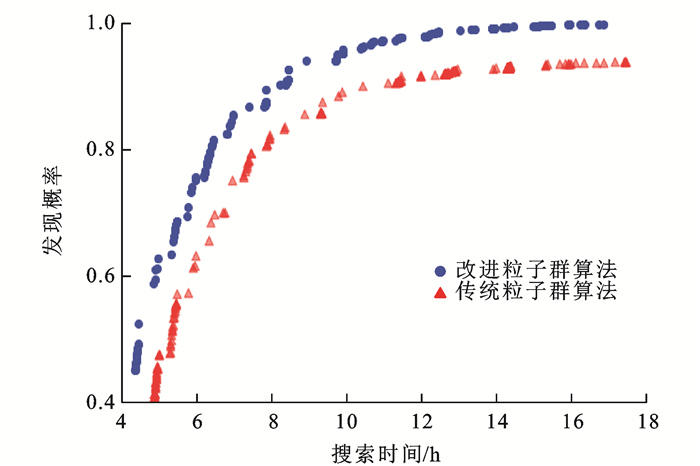
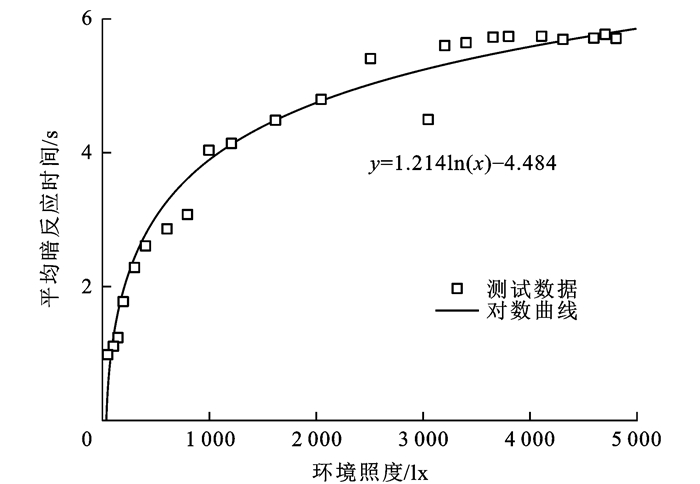
Associated searching and rescuing optimization of salvage vessels and helicopters in remote sea area
Abstract:
2021, 21(2): 187-199.
doi: 10.19818/j.cnki.1671-1637.2021.02.016