| Citation: | YANG Long-hai, ZHANG Chun, CHOU Xiao-yun, LI Shuai, WANG Hui. Research progress on car-following models[J]. Journal of Traffic and Transportation Engineering, 2019, 19(5): 125-138. doi: 10.19818/j.cnki.1671-1637.2019.05.013

|

| [1] |
REUSCHEL A. Vehicle movements in the column uniformly accelerated or delayed[J]. Oesterreich IngrArch, 1950, 4: 193-215.
|
| [2] |
PIPES L A. An operational analysis of traffic dynamics[J]. Journal of Applied Physics, 1953, 24(3): 274-281. doi: 10.1063/1.1721265
|
| [3] |
BRACKSTONE M, MCDONALD M. Car-following: a historical review[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 1999, 2(4): 181-196. doi: 10.1016/S1369-8478(00)00005-X
|
| [4] |
NAGEL K, SCHRECKENBERG M. A cellular automaton model for freeway traffic[J]. Journal de Physique I, 1992, 2(12): 2221-2229. doi: 10.1051/jp2:1992262
|
| [5] |
FUKUI M, ISHIBASHI Y. Traffic flow in 1D cellular automaton model including cars moving with high speed[J]. Journal of the Physical Society of Japan, 1996, 65(6): 1868-1870. doi: 10.1143/JPSJ.65.1868
|
| [6] |
KRAUSS S, WAGNER P, GAWRON C. Continuous limit of the Nagel-Schreckenberg model[J]. Physical Review E: Statistical Physics, Plasmas, Fluids, and Related Interdisciplinary Topics, 1996, 54(4): 3707-3712.
|
| [7] |
KRAUSS S, WAGNER P, GAWRON C. Metastable states in a microscopic model of traffic flow[J]. Physical Review E: Statistical Physics, Plasmas, Fluids, and Related Interdisciplinary Topics, 1997, 55(5): 5597-5602.
|
| [8] |
BARLOVIC R, SANTEN L, SCHADSCHNEIDER A, et al. Metastable states in cellular automata for traffic flow[J]. European Physical Journal B, 1998, 5(3): 793-800. doi: 10.1007/s100510050504
|
| [9] |
HOOGENDOORN S P, BOVY P H L. State-of-the-art of vehicular traffic flow modelling[J]. Proceedings of the Institution of Mechanical Engineers Part I: Journal of Systems and Control Engineering, 2001, 215(4): 283-303. doi: 10.1177/095440890121500403
|
| [10] |
OLSTAM J J, TAPANI A. Comparison of car-following models[R]. Stockholm: Swedish National Road and Transport Research Institute, 2004.
|
| [11] |
PANWAI S, DIA H. Comparative evaluation of microscopic car-following behavior[J]. IEEE Transactions on Intelligent Transportation Systems, 2005, 6(3): 314-325. doi: 10.1109/TITS.2005.853705
|
| [12] |
TOLEDO T. Driving behaviour: models and challenges[J]. Transport Reviews, 2007, 27(1): 65-84. doi: 10.1080/01441640600823940
|
| [13] |
WANG Dian-hai, JIN Sheng. Review and outlook of modeling of car following behavior[J]. China Journal of Highway and Transport, 2012, 25(1): 115-127. (in Chinese). doi: 10.3969/j.issn.1001-7372.2012.01.018
|
| [14] |
SAIFUZZAMAN M, ZHENG Zu-duo. Incorporating human-factors in car-following models: a review of recent developments and research needs[J]. Transportation Research Part C: Emerging Technologies, 2014, 48: 379-403. doi: 10.1016/j.trc.2014.09.008
|
| [15] |
WAHLE J, NEUBERT L, SCHRECKENBERG M. Modeling and simulation of traffic flow[J]. Computer Physics Communications, 1999, 121/122: 402-405. doi: 10.1016/S0010-4655(99)00367-7
|
| [16] |
FRITZSCHE H T. A model for traffic simulation[J]. Traffic Engineering and Control, 1994, 35(5): 317-321.
|
| [17] |
FANCHER P S, BAREKET Z. Evolving model for studying driver-vehicle system performance in longitudinal control of headway[J]. Transportation Research Record, 1998, 1631: 13-19. doi: 10.3141/1631-03
|
| [18] |
MICHAELS R M, COZAN L W. Perceptual and field factors causing lateral displacement[J]. Highway Research Record, 1963, 25: 1-13.
|
| [19] |
GRAY R, REGAN D. Accuracy of estimating time to collision using binocular and monocular information[J]. Vision Research, 1998, 38(4): 499-512. doi: 10.1016/S0042-6989(97)00230-7
|
| [20] |
ANDERSEN G J, SAUER C W. Optical information for car following: the driving by visual angle (DVA) model[J]. Human Factors, 2007, 49(5): 878-896. doi: 10.1518/001872007X230235
|
| [21] |
HAMDAR S H, TREIBER M, MAHMASSANI H S, et al. Modeling driver behavior as sequential risk-taking task[J]. Transportation Research Record, 2008(2088): 208-217.
|
| [22] |
HAMDAR S H, MAHMASSANI H S, TREIBER M. From behavioral psychology to acceleration modeling: calibration, validation, and exploration of drivers' cognitive and safety parameters in a risk-taking environment[J]. Transportation Research Part B: Methodological, 2015, 78: 32-53. doi: 10.1016/j.trb.2015.03.011
|
| [23] |
TALEBPOUR A, MAHMASSANI H S, HAMDAR S H. Multiregime sequential risk-taking model of car-following behavior: specification, calibration, and sensitivity analysis[J]. Transportation Research Record, 2016(2260): 60-66.
|
| [24] |
STANTON N A, SALMON P M. Human error taxonomies applied to driving: a generic driver error taxonomy and its implications for intelligent transport systems[J]. Safety Science, 2009, 47(2): 227-237. doi: 10.1016/j.ssci.2008.03.006
|
| [25] |
YOUNG K L, SALMON P M. Examining the relationship between driver distraction and driving errors: a discussion of theory, studies and methods[J]. Safety Science, 2012, 50(2): 165-174. doi: 10.1016/j.ssci.2011.07.008
|
| [26] |
PRZYBYLA J, TAYLOR J, JUPE J, et al. Simplified, data-driven, errorable car-following model to predict the safety effects of distracted driving[C]∥IEEE. 2012 15th International IEEE Conference on Intelligent Transportation Systems. New York: IEEE, 2012: 1149-1154.
|
| [27] |
CHEN Dan-jue, LAVAL J, ZHENG Zu-duo, et al. A behavioral car-following model that captures traffic oscillations[J]. Transportation Research Part B: Methodological, 2012, 46(6): 744-761. doi: 10.1016/j.trb.2012.01.009
|
| [28] |
YANG H H, PENG H. Development of an errorable car-following driver model[J]. Vehicle System Dynamics, 2010, 48(6): 751-773. doi: 10.1080/00423110903128524
|
| [29] |
FULLER R. The task-capability interface model of the driving process[J]. Recherche Transports Sécurité, 2000, 66: 47-57.
|
| [30] |
FULLER R. Towards a general theory of driver behaviour[J]. Accident Analysis and Prevention, 2005, 37(3): 461-472. doi: 10.1016/j.aap.2004.11.003
|
| [31] |
SAIFUZZAMAN M, ZHENG Zu-duo, MAZHARUL HAQUE M, et al. Revisiting the task-capability interface model for incorporating human factors into car-following models[J]. Transportation Research Part B: Methodological, 2015, 82: 1-19.
|
| [32] |
TANG Tie-qiao, WANG Yun-peng, YANG Xiao-bao, et al. A new car-following model accounting for varying road condition[J]. Nonlinear Dynamics, 2012, 70(2): 1397-1405. doi: 10.1007/s11071-012-0542-8
|
| [33] |
TANG T Q, LI J G, HUANG H J, et al. A car-following model with real-time road conditions and numerical tests[J]. Measurement: Journal of the International Measurement Confederation, 2014, 48: 63-76. doi: 10.1016/j.measurement.2013.10.035
|
| [34] |
YANG Long-hai, ZHANG Xi-qiao, GONG Jie-kun, et al. The research of car- following model based on real-time maximum deceleration[J]. Mathematical Problems in Engineering, 2015, 2015: 1-9.
|
| [35] |
LI Chuan-yao, TANG Tie-qiao, HUANG Hai-jun, et al. A new car-following model with consideration of driving resistance[J]. Chinese Physics Letters, 2011, 28(3): 38902-1-4. doi: 10.1088/0256-307X/28/3/038902
|
| [36] |
JIN Sheng, WANG Dian-hai, TAO Peng-fei, et al. Non-lane-based full velocity difference car following model[J]. Physica A: Statistical Mechanics and its Applications, 2010, 389(21): 4654-4662. doi: 10.1016/j.physa.2010.06.014
|
| [37] |
LIANG Yu-juan, XUE Yu. Study on traffic flow affected by the road turning[J]. Acta Physica Sinica, 2010, 59(8): 5325-5331. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-WLXB201008028.htm
|
| [38] |
ZHANG H M. Driver memory, traffic viscosity and a viscous vehicular traffic flow model[J]. Transportation Research Part B: Methodological, 2003, 37(1): 27-41. doi: 10.1016/S0191-2615(01)00043-1
|
| [39] |
TANG T Q, HUANG H J, ZHAO S G, et al. An extended OV model with consideration of driver's memory[J]. International Journal of Modern Physics B, 2009, 23(5): 743-752. doi: 10.1142/S0217979209051966
|
| [40] |
TANG T Q, LI C Y, HUANG H J. A new car-following model with the consideration of the driver's forecast effect[J]. Physics Letters A, 2010, 374(38): 3951-3956. doi: 10.1016/j.physleta.2010.07.062
|
| [41] |
QIN Yan-yan, WANG Hao, WANG Wei, et al. Review of car-following models of adaptive cruise control[J]. Journal of Traffic and Transportation Engineering, 2017, 17(3): 121-130. (in Chinese). doi: 10.3969/j.issn.1671-1637.2017.03.013
|
| [42] |
HUA Xue-dong, WANG Wei, WANG Hao. A car-following model with the consideration of vehicle-to-vehicle communication technology[J]. Acta Physica Sinica, 2016, 65(1): 44-55. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-WLXB201601006.htm
|
| [43] |
WANG Tao, ZHAO Jing, LI Peng. An extended car-following model at un-signalized intersections under V2V communication environment[J]. Plos One, 2018, 13(2): 1-13.
|
| [44] |
TANG Tie-qiao, SHI Wei-feng, SHANG Hua-yan, et al. A new car-following model with consideration of inter-vehicle communication[J]. Nonlinear Dynamics, 2014, 76(4): 2017-2023. doi: 10.1007/s11071-014-1265-9
|
| [45] |
TANG Tie-qiao, SHI Wei-feng, SHANG Hua-yan, et al. An extended car-following model with consideration of the reliability of inter-vehicle communication[J]. Measurement: Journal of the International Measurement Confederation, 2014, 58: 286-293. doi: 10.1016/j.measurement.2014.08.051
|
| [46] |
OU Hui, TANG Tie-qiao. An extended two-lane car-following model accounting for inter-vehicle communication[J]. Physica A: Statistical Mechanics and its Applications, 2018, 495: 260-268. doi: 10.1016/j.physa.2017.12.100
|
| [47] |
SHEN Feng-chun. Studies on mixed traffic flow modeling based on extended cellular automaton[D]. Hangzhou: Zhejiang University, 2012. (in Chinese).
|
| [48] |
YU Dan. Research on characteristics analysis of car-truck heterogeneous traffic based on the cellular automata model[D]. Chengdu: Southwest Jiaotong University, 2016. (in Chinese).
|
| [49] |
QIN Yan-yan, WANG Hao, WANG Wei, et al. Fundamental diagram model of heterogeneous traffic flow mixed with cooperative adaptive cruise control vehicles and adaptive cruise control vehicles[J]. China Journal of Highway and Transport, 2017, 30(10): 127-136. (in Chinese). doi: 10.3969/j.issn.1001-7372.2017.10.016
|
| [50] |
KNORR F, SCHRECKENBERG M. Influence of inter-vehicle communication on peak hour traffic flow[J]. Physica A: Statistical Mechanics and its Applications, 2012, 391(6): 2225-2231. doi: 10.1016/j.physa.2011.11.027
|
| [51] |
BOSE A, IOANNOU P. Analysis of traffic flow with mixed manual and semi-automated vehicles[C]//IEEE. Proceedings of the 1999 American Control Conference. New York: IEEE, 1999: 2173-2177.
|
| [52] |
BOSE A, IOANNOU P. Mixed manual/semi-automated traffic: a macroscopic analysis[J]. Transportation Research Part C: Emerging Technologies, 2003, 11(6): 439-462. doi: 10.1016/j.trc.2002.04.001
|
| [53] |
QIU Xiao-ping, MA Li-na, ZHOU Xiao-xia, et al. The mixed traffic flow of manual-automated driving based on safety distance[J]. Journal of Transportation Systems Engineering and Information Technology, 2016, 16(4): 101-108, 124. (in Chinese). doi: 10.3969/j.issn.1009-6744.2016.04.015
|
| [54] |
ZHU W X, ZHANG H M. Analysis of mixed traffic flow with human-driving and autonomous cars based on car-following model[J]. Physica A: Statistical Mechanics and its Applications, 2018, 496: 274-285. doi: 10.1016/j.physa.2017.12.103
|
| [55] |
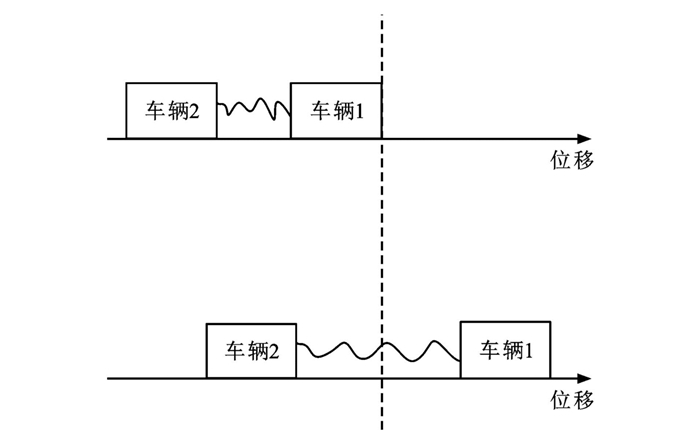
WANG Dian-hai, YANG Shao-hui, CHU Lian-yu. Modeling car-following dynamics during the starting and stopping process based on a spring system model[J]. Tsinghua Science and Technology, 2004, 9(6): 643-652.
|
| [56] |
ZADEH L A. Outline of a new approach to the analysis of complex systems and decision processes[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1973, SMC-3(1): 28-44. doi: 10.1109/TSMC.1973.5408575
|
| [57] |
CHAKROBORTY P. Models of vehicular traffic: an engineering perspective[J]. Physica A: Statistical Mechanics and its Applications, 2006, 372(1): 151-161. doi: 10.1016/j.physa.2006.05.009
|
| [58] |
JIA Hong-fei, JUAN Zhi-cai, WANG Xiao-yuan. Development of a car-following model based on artificial neural networks[J]. Journal of Highway and Transportation Research and Development, 2001, 18(4): 92-94. (in Chinese). doi: 10.3969/j.issn.1002-0268.2001.04.025
|
| [59] |
XU Xue-ming, RONG Jian, WANG Li. Development of a car-following model based on combined neural network model[J]. Journal of Highway and Transportation Research and Development, 2007, 24(3): 130-132. (in Chinese). doi: 10.3969/j.issn.1002-0268.2007.03.031
|
| [60] |
ZHOU Li-jun, WANG Dian-hai, LI Wei-qing. Application of artificial neural network and particle swarm optimization in car-following model[J]. Journal of Jilin University (Engineering and Technology Edition), 2009, 39(4): 896-899. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY200904013.htm
|
| [61] |
HUANG Su-nan, REN Wei. Use of neural fuzzy networks with mixed genetic/gradient algorithm in automated vehicle control[J]. IEEE Transactions on Industrial Electronics, 1999, 46(6): 1090-1102. doi: 10.1109/41.807993
|
| [62] |
MA Xiao-liang. A neural-fuzzy framework for modeling car-following behavior[C]//IEEE. IEEE International Conference on Systems, Man and Cybernetics. New York: IEEE, 2007: 1178-1183.
|
| [63] |
LI De-hui, LIU Xiao-ming, RONG Jian, et al. Car-following safety modeling and simulation with fuzzy neural network[J]. Journal of Beijing University of Technology, 2007, 33(4): 398-401. (in Chinese). doi: 10.3969/j.issn.0254-0037.2007.04.012
|
| [64] |
TOLEDO T, KOUTSOPOULOS H N, AHMED K I. Estimation of vehicle trajectories with locally weighted regression[J]. Transportation Research Record, 2007(1999): 161-169.
|
| [65] |
PAPATHANASOPOULOU V, ANTONIOU C. Towards data-driven car-following models[J]. Transportation Research Part C: Emerging Technologies, 2015, 55: 496-509. doi: 10.1016/j.trc.2015.02.016
|
| [66] |
HE Zheng-bing, ZHENG Liang, GUAN Wei. A simple nonparametric car-following model driven by field data[J]. Transportation Research Part B: Methodological, 2015, 80: 185-201. doi: 10.1016/j.trb.2015.07.010
|
| [67] |
WEI Da-li, LIU Hong-chao. Analysis of asymmetric driving behavior using a self-learning approach[J]. Transportation Research Part B: Methodological, 2013, 47: 1-14. doi: 10.1016/j.trb.2012.09.003
|
| [68] |
HINTON G E, SALAKHUTDINOV R R. Reducing the dimensionality of data with neural networks[J]. Science, 2006, 313(5786): 504-507. doi: 10.1126/science.1127647
|
| [69] |
ZHOU Mo-fan, QU Xiao-bao, LI Xiao-peng. A recurrent neural network based microscopic car following model to predict traffic oscillation[J]. Transportation Research Part C: Emerging Technologies, 2017, 84: 245-264. doi: 10.1016/j.trc.2017.08.027
|
| [70] |
WANG Xiao, JIANG Rui, LI Li, et al. Capturing car-following behaviors by deep learning[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(3): 910-920. doi: 10.1109/TITS.2017.2706963
|
| [71] |
HUANG Xiu-ling, SUN Jie, SUN Jian. A car-following model considering asymmetric driving behavior based on long short-term memory neural networks[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 346-362. doi: 10.1016/j.trc.2018.07.022
|
| [72] |
SUN Qian, GUO Zhong-yin. Vehicle following model based on LSTM neural network[J]. Journal of Jilin University(Engineering and Technology Edition), DOI: 10.13229/j.cnki.jdxbgxb20190287.(inChinese).
|
| [73] |
MNIH V, KAVUKCUOGLU K, SILVER D, et al. Human-level control through deep reinforcement learning[J]. Nature, 2015, 518: 529-533. doi: 10.1038/nature14236
|
| [74] |
ZHU Mei-xin, WANG Xue-song, WANG Yin-hai. Human-like autonomous car-following model with deep reinforcement learning[J]. Transportation Research Part C: Emerging Technologies, 2018, 97: 348-368. doi: 10.1016/j.trc.2018.10.024
|
| [75] |
LAVAL J A, LECLERCQ L. A mechanism to describe the formation and propagation of stop-and-go waves in congested freeway traffic[J]. Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences, 2010, 368: 4519-4541. doi: 10.1098/rsta.2010.0138
|
| [76] |
GONG Si-yuan, SHEN Jing-lai, DU Li-li. Constrained optimization and distributed computation based car following control of a connected and autonomous vehicle platoon[J]. Transportation Research Part B: Methodological, 2016, 94: 314-334. doi: 10.1016/j.trb.2016.09.016
|
| [77] |
HAMDAR S H, QIN Ling-qiao, TALEBPOUR A. Weather and road geometry impact on longitudinal driving behavior: exploratory analysis using an empirically supported acceleration modeling framework[J]. Transportation Research Part C: Emerging Technologies, 2016, 67: 193-213. doi: 10.1016/j.trc.2016.01.017
|
| [78] |
HUANG Yueng-hsang, ZHANG Wei, ROETTING M, et al. Experiences from dual-country drivers: driving safely in China and the US[J]. Safety Science, 2006, 44(9): 785-795. doi: 10.1016/j.ssci.2006.05.002
|
| [79] |
JIANG R, HU M B, ZHANG H M, et al. Traffic experiment reveals the nature of car-following[J]. Plos One, 2014, 9(4): 1-9.
|
| [80] |
JIANG R, HU M B, ZHANG H M, et al. On some experimental features of car-following behavior and how to model them[J]. Transportation Research Part B: Methodological, 2015, 80: 338-354. doi: 10.1016/j.trb.2015.08.003
|
| [81] |
JIANG R, JIN C J, ZHANG H M, et al. Experimental and empirical investigations of traffic flow instability[J]. Transportation Research Part C: Emerging Technologies, 2018, 94: 83-98. doi: 10.1016/j.trc.2017.08.024
|
| [82] |
ZHU Mei-xin, WANG Xue-song, TARKO A, et al. Modeling car-following behavior on urban expressways in Shanghai: a naturalistic driving study[J]. Transportation Research Part C: Emerging Technologies, 2018, 93: 425-445.
|
| [83] |
LUO Ying, QIN Wen-hu. Combination low-speed car-following model based on IDM and RBFNN[J]. Application Research of Computers, 2019, 37(8): 1-7. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JSYJ202008023.htm
|
Copyright《Journal of Traffic and Transportation Engineering》编辑部陕ICP备05001904号-1
Address :Editorial Department of Journal of Traffic and Transportation Engineering, Chang 'an University, Middle Section of South Second Ring Road, Xi 'an, Shaanxi(710064) Tel:029-82334388 Email:jygc@chd.edu.cn
All visit:Today's visit:
Supported by:
Beijing Renhe Information Technology Co. Ltd




 DownLoad:
DownLoad: