

Detection method of queuing vehicles on urban road
-
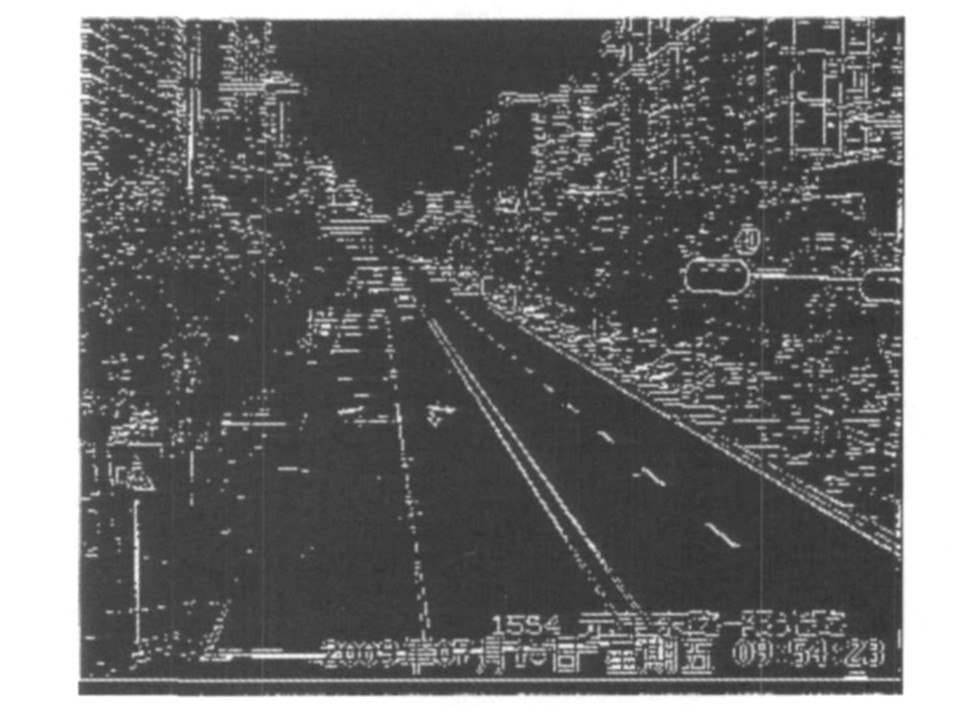
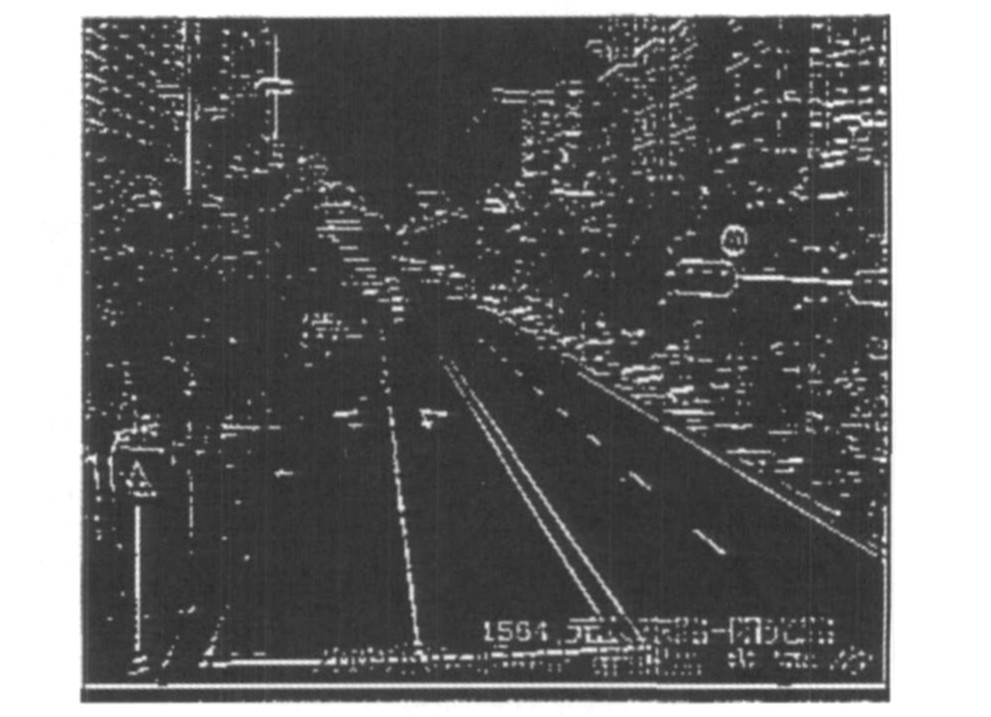
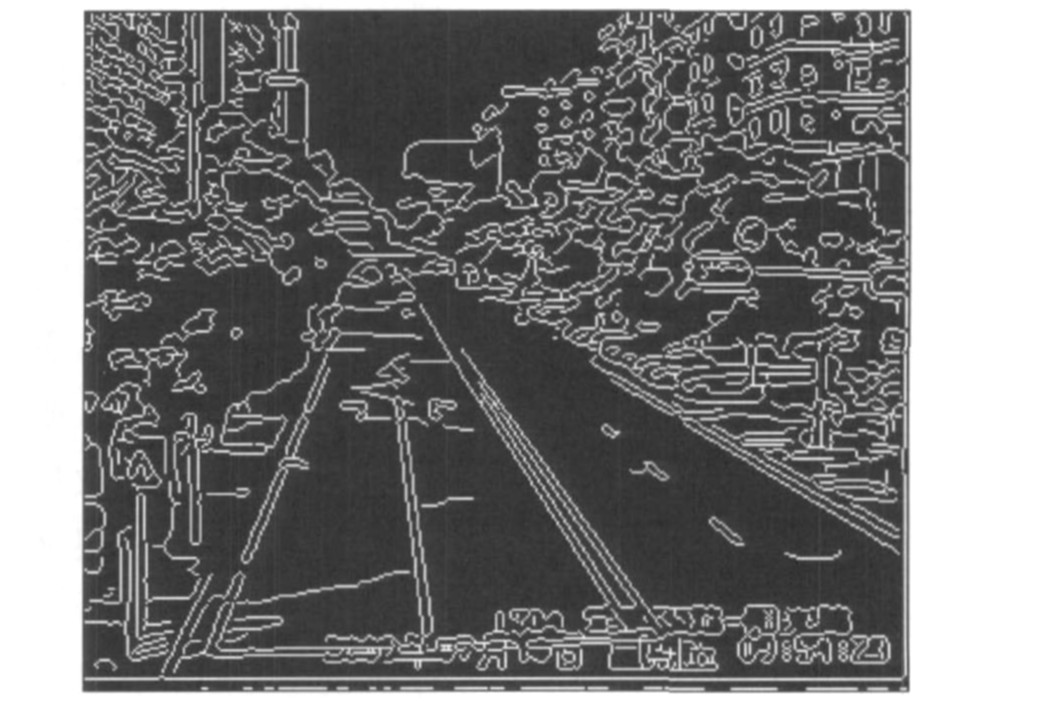
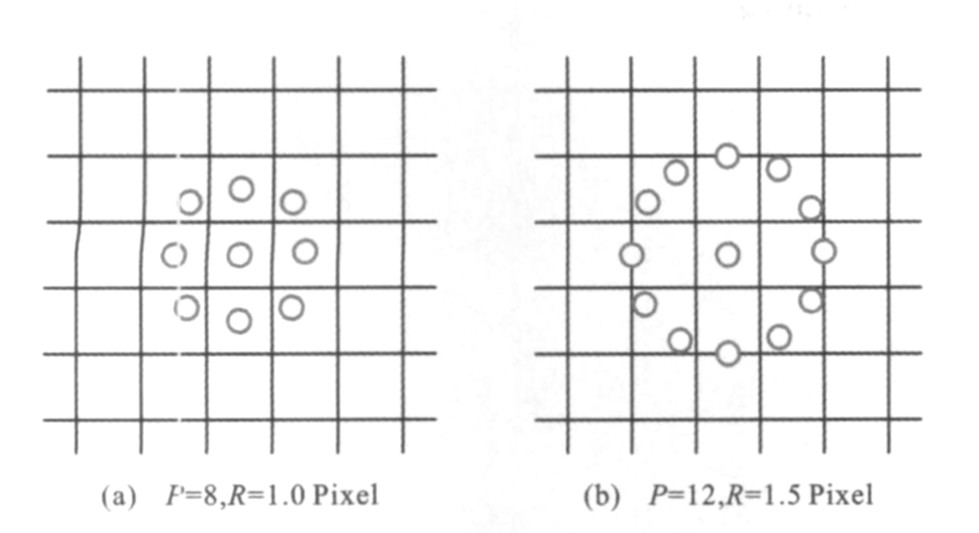
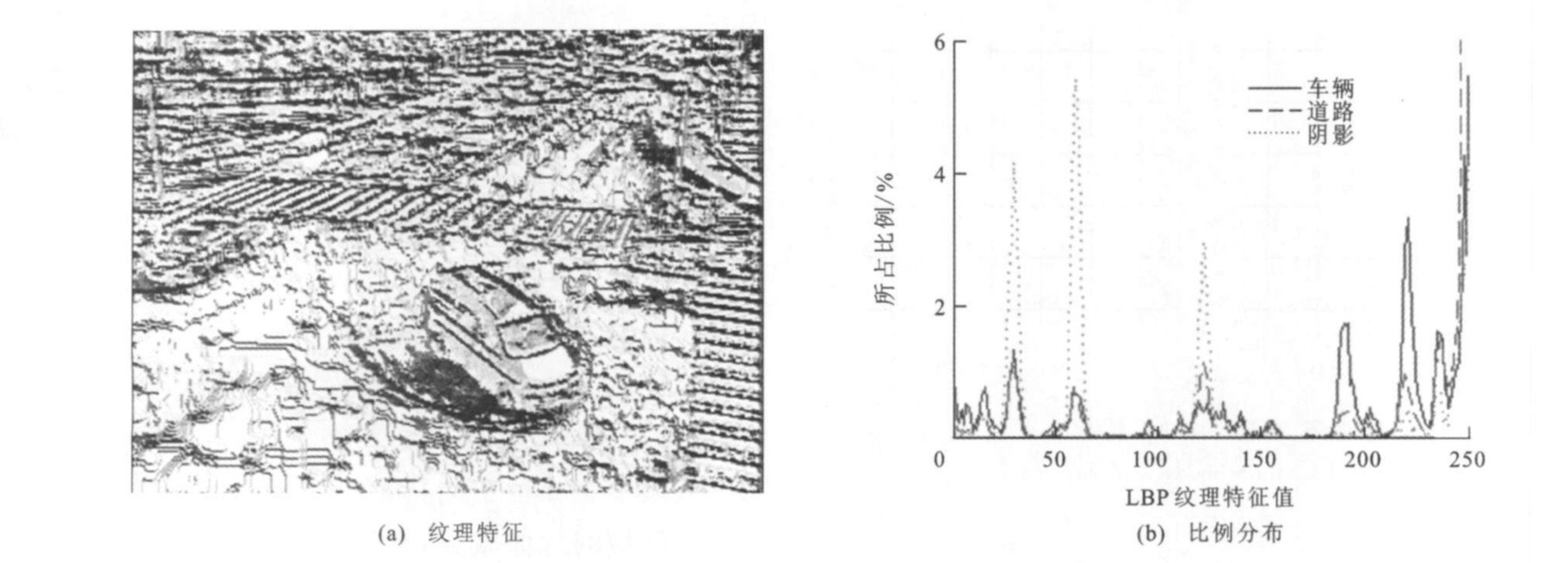
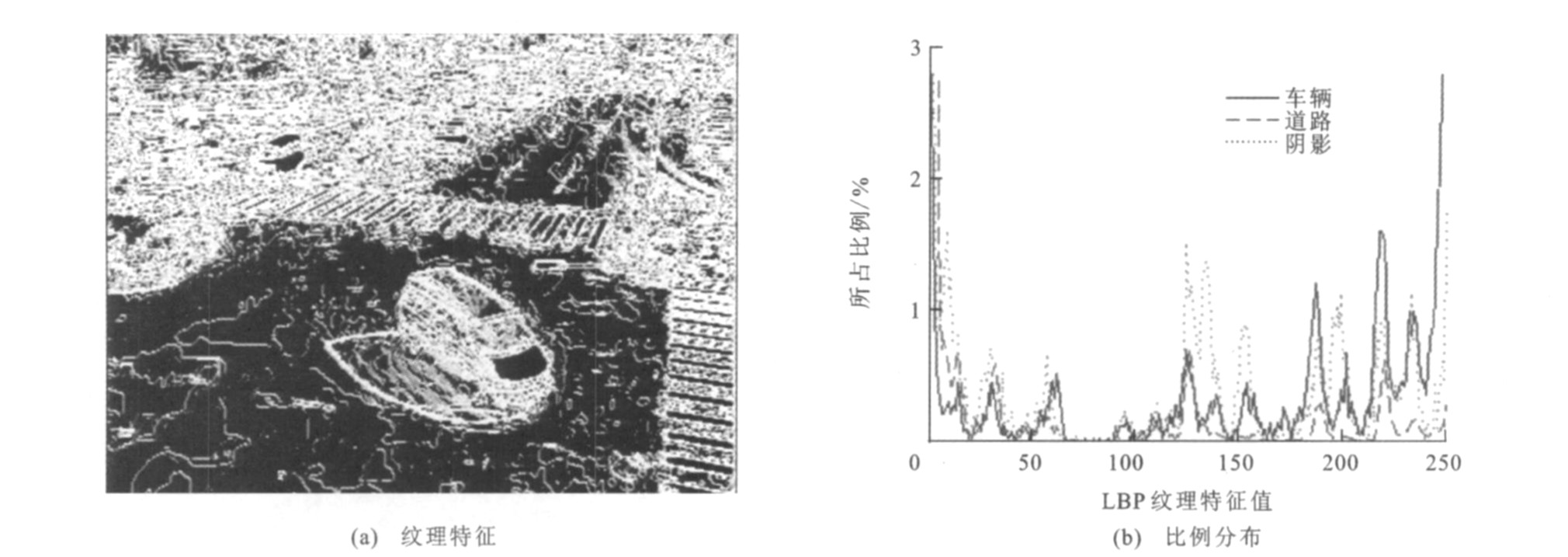
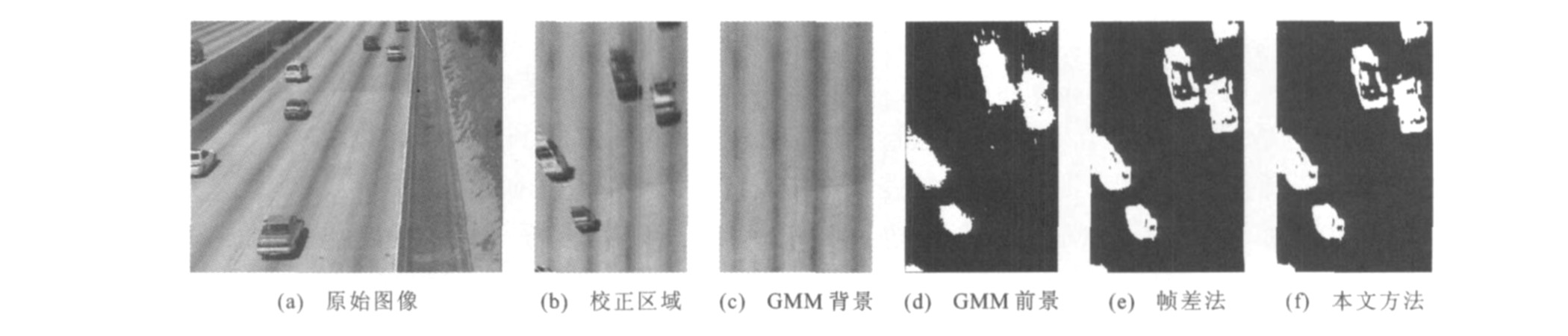
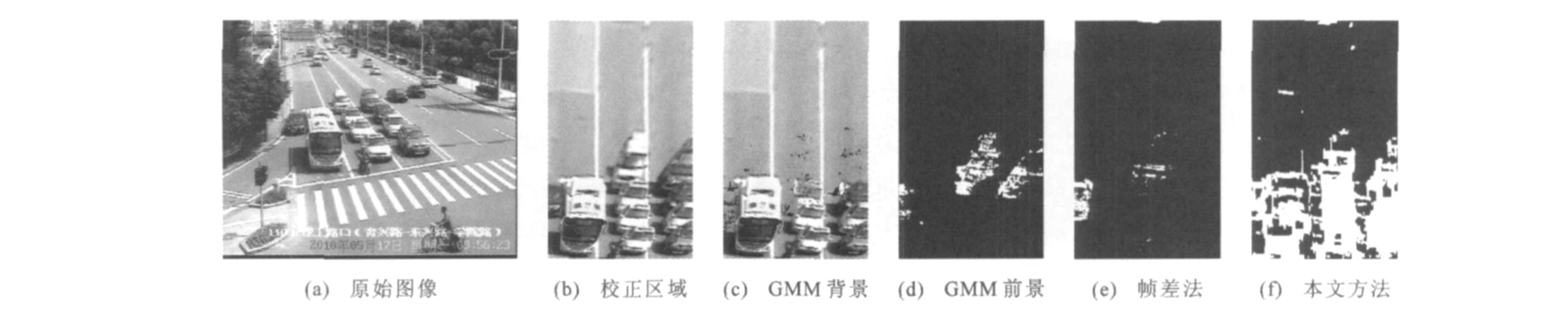
摘要: 针对城市道路环境下的排队车辆检测问题, 提出一种基于边缘信息和局部纹理特征的综合检测方法。根据交通环境的特点, 对比5种不同边缘检测方法的性能, 采用Canny算法提取边缘信息, 采用改进的LBP方法提取纹理特征, 得到车辆的综合检测结果, 提取车辆排队长度和车道占有率等交通参数。分别采用综合检测方法、高斯混合模型和帧差法处理快速路、交叉路口、阴雨天气、光线突变、大雪天气、浓雾天气等场景下的视频图像, 并采用ROC曲线对检测性能进行量化评价。分析结果表明: 在快速路和大雪天气场景中, 3种方法检测性能基本相似, 最佳检测率分别接近90.0%和60.0%, 虚警率分别不超过5.0%和10.0%;在交叉路口场景中, 3种方法的最佳检测率分别为77.1%、31.5%、13.6%, 虚警率分别为16.5%、3.2%、19.0%;在阴雨天气场景中, 3种方法的最佳检测率分别为65.2%、3.0%、62.4%, 虚警率分别为10.5%、5.0%、56.5%;在光线突变场景中, 3种方法的最佳检测率分别为62.0%、18.9%、39.7%, 虚警率分别为10.8%、55.1%、36.0%;在浓雾天气场景中, 当能见度较低时, 3种方法的检测率和虚警率均接近于0。Abstract: Aiming at the detection problem of queuing vehicles under the condition of urban road, a synthesis method based on edge information and local texture feature was put out. According to the characteristics of traffic enviroment, the performances of five different edge detection methods were compared, Canny algorithm was used to extract the edge information, and the improved LBP method was used to extract texture feature. The comprehensive detection result of vehicle was obtained, and the traffic parameters such as vehicle queuing length and lane occupancy rate were extracted. The proposed method, Gaussian mixture model and frame difference method were used to treat the video images of different scenes such as expressway, intersection, rainy weather, illumination mutation, heavy snowy weather and dense fog weather, and the quantitative evaluation of detection performance was carried out through ROC curve. Analysis result shows that under the scenes of expressway and heavy snowy weather, the detection performances of three methods are almost same, the best detection rates are close to 90.0% and 60.0% respectively, and false alarm rates are no more than 5.0% and 10.0% respectively. Under the scene of intersection, the best detection rates of three methods are 77.1%, 31.5% and 13.6% respectively, false alarm rates are 16.5%, 3.2% and 19.0% respectively. Under the scene of rainy weather, the best detection rates of three methods are 65.2%, 3.0% and 62.4%, false alarm rates are 10.5%, 5.0% and 56.5% respectively. Under the scene of illumination mutation, the best detection rates of three methods are 62.0%, 18.9% and 39.7%, false alarm rates are 10.8%, 55.1% and 36.0% respectively. Under the scene of dense fog weather, when visibility is lower, the detection rates and false alarm rates of three methods are close to zero.
-
Key words:
- traffic detection /
- traffic parameter /
- urban road /
- texture feature /
- ROC curve /
- Gaussian mixture model /
- frame difference method
-

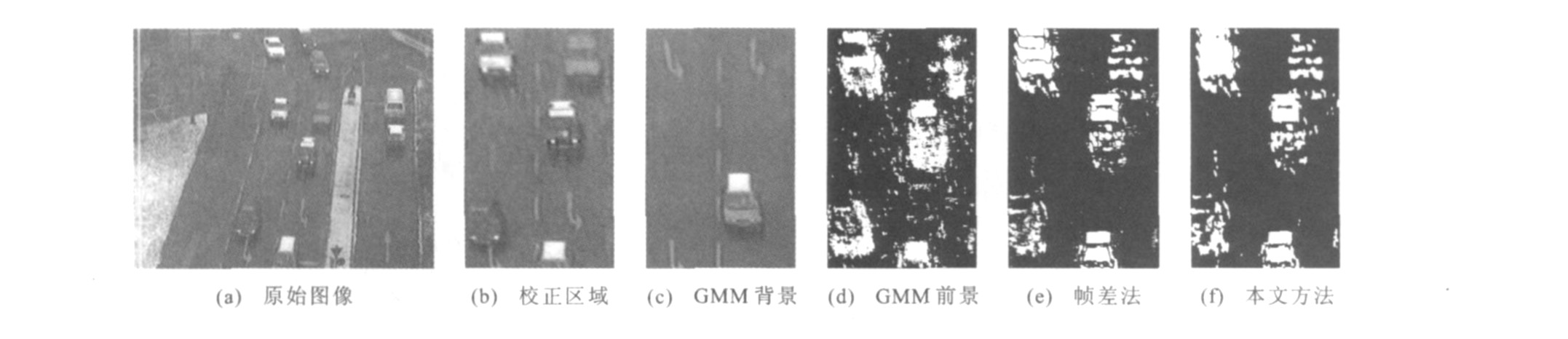
图 14 快速路序列中第490帧的试验结果
Figure 14. Experiment results of 490th frame in expressway sequence

图 15 快速路序列中第495帧的试验结果
Figure 15. Experiment results of 495th frame in expressway sequence

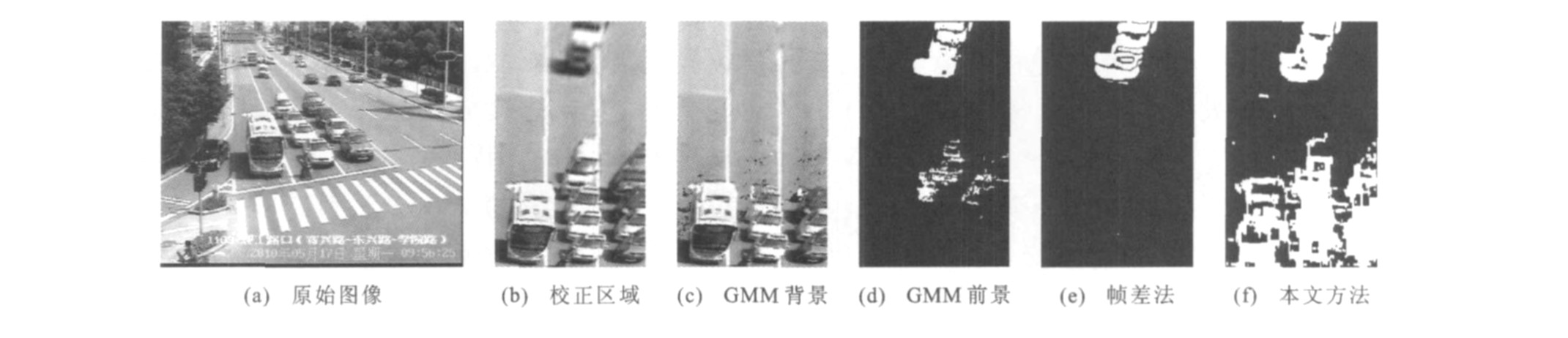
图 16 交叉路口序列中第551帧的试验结果
Figure 16. Experiment results of 551st frame in intersection sequence

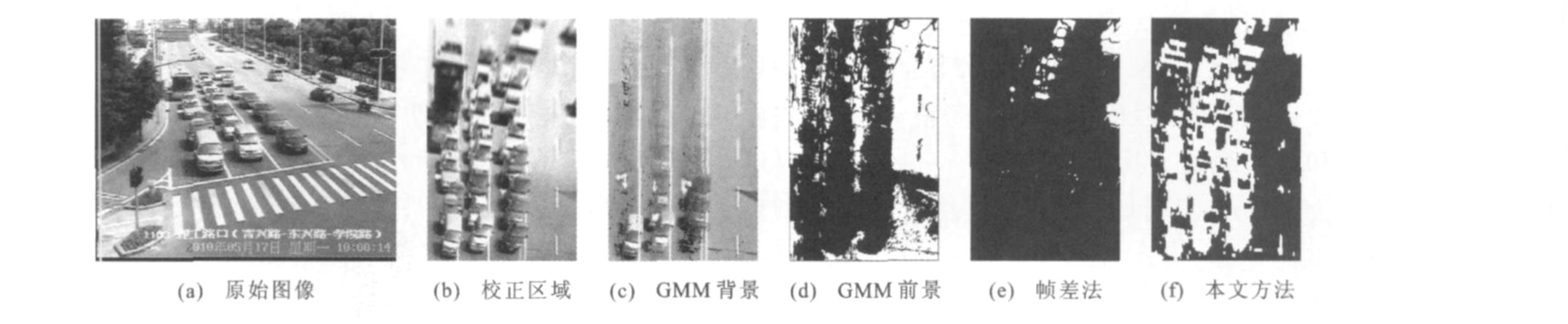
图 17 交叉路口序列中第559帧的试验结果
Figure 17. Experiment results of 559th frame in intersection sequence

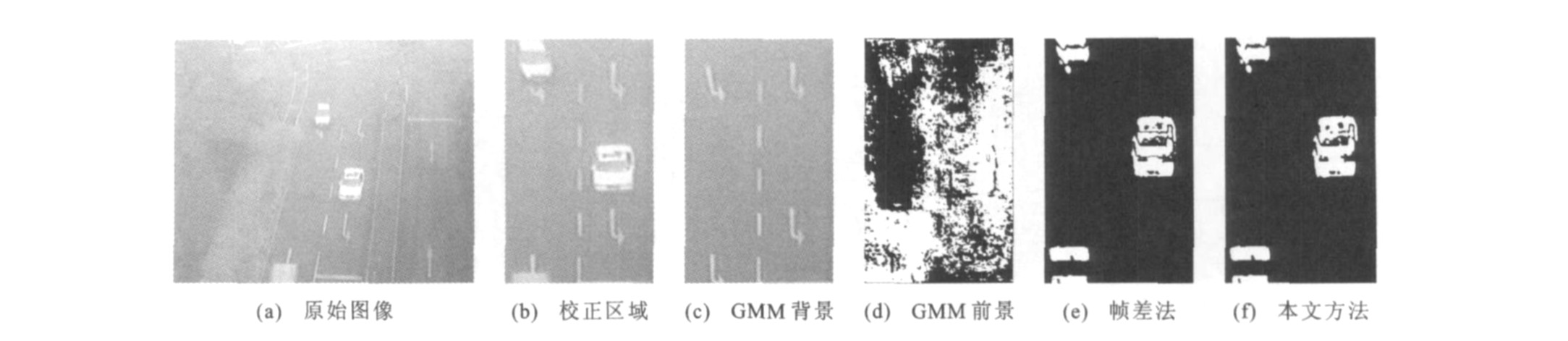
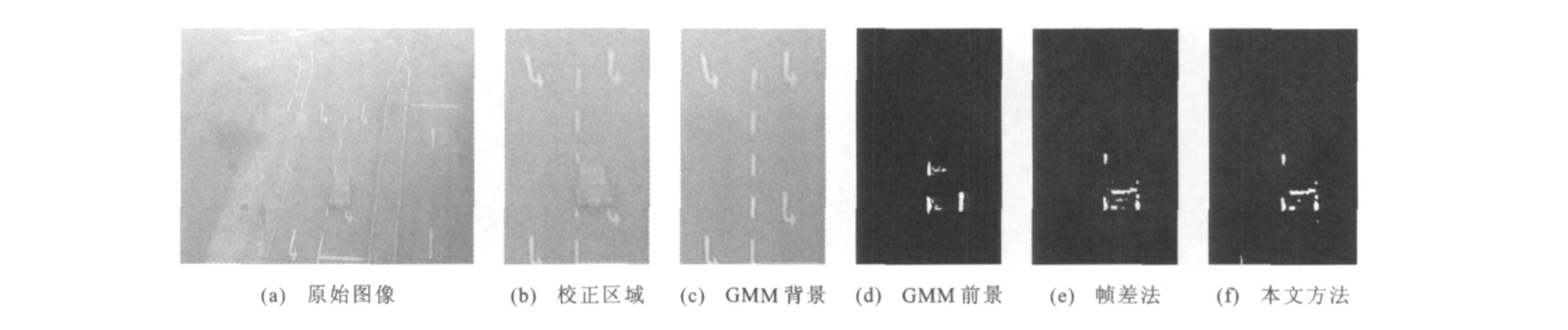
图 18 阴雨天气序列中第640帧的试验结果
Figure 18. Experiment results of 640th frame in rainy weather sequence

图 19 阴雨天气序列中第705帧的试验结果
Figure 19. Experiment results of 705th frame in rainy weather sequence

图 20 光线突变序列中第1 265帧的试验结果
Figure 20. Experiment results of 1 265th frame in illumination mutation sequence

图 21 光线突变序列中第1 355帧的试验结果
Figure 21. Experiment results of 1 355th frame in illumination mutation sequence

图 22 大雪天气序列中第130帧的试验结果
Figure 22. Experiment results of 130th frame in heavy snowy weather sequence

图 23 大雪天气序列中第185帧的试验结果
Figure 23. Experiment results of 185th frame in heavy snowy weather sequence

图 24 浓雾天气序列中第165帧的试验结果
Figure 24. Experiment results of 165th frame in dense fog weather sequence
-
[1] BUCH N, VELASTIN S A, ORWELL J. A review of com-puter vision techniques for the analysis of urban traffic[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(3): 920-939. doi: 10.1109/TITS.2011.2119372 [2] WANG Guo-lin, XIANG De-yun, GU J. Review on vehicle detection based on video for traffic surveillance[C]∥IEEE. IEEE International Conference on Automation and Logistics. Qingdao: IEEE, 2008: 2961-2966. [3] ZHENG Jian-yang, WANG Ying-hai, NIHAN N L, et al. Extracting roadway background image: mode-based approach[J]. Transportation Research Record, 2006(1944): 82-88. [4] STAUFFER C, GRIMSON W E L. Learning patterns of activity using real-time tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(8): 747-757. doi: 10.1109/34.868677 [5] ELGAMMAL A, DURAISWAMI R, HARWOOD D, et al. Background and foreground modeling using nonparametric kernel density estimation for visual surveillance[J]. Proceed-ings of the IEEE, 2002, 90(7): 1151-1163. doi: 10.1109/JPROC.2002.801448 [6] ZHANG Wei, FANG Xiang-zhong, YANG Xiao-kang. Moving vehicles segmentation based on Bayesian framework for Gaussian motion model[J]. Pattern Recognition Letters, 2006, 27(9): 956-967. doi: 10.1016/j.patrec.2005.12.013 [7] SUN Y, YUAN B. Hierarchical GMM to handle sharp changes in moving object detection[J]. Electronics Letters, 2004, 40(13): 801-802. doi: 10.1049/el:20040552 [8] STURGESS P, ALAHARI K, LADICKY L, et al. Combining appearance and structure from motion features for toad scene understanding[C]∥BMVA. British Machine Vision Conference. London: BMVA, 2009: 1-11. [9] KIM Z W, MALIK J. Fast vehicle detection with probabilistic feature grouping and its application to vehicle tracking[C]∥IEEE. Proceedings of the Ninth IEEE International Conference on Computer Vision. Sacramento: IEEE, 2003: 524-531. [10] JOHANSSON B, WIKLUND J, FORSSEN P E, et al. Com-bining shadow detection and simulation for estimation of vehicle size and position[J]. Pattern Recognition Letters, 2009, 30(8): 751-759. doi: 10.1016/j.patrec.2009.03.005 [11] HSIEHJ W, YU S H, CHEN Y S, et al. Automatic traffic surveillance system for vehicle tracking and classification[J]. IEEE Transactions on Intelligent Transportation Systems, 2006, 7(2): 175-187. doi: 10.1109/TITS.2006.874722 [12] OPELT A, PINZ A, FUSSENEFFER M, et al. Generic object recognition with boosting[J]. IEEE Transactions on Pattern Analysis and Machine Inteligence, 2006, 28(3): 416-431. [13] OJALA T, PIETIKAINEN M. Unsupervised texture segmenta-tion using feature distributions[J]. Pattern Recognition, 1999, 32(3): 477-486. doi: 10.1016/S0031-3203(98)00038-7 [14] OJALA T, PIETIKAINEN M, MAENPAA T. Multiresolu-tion gray-scale and rotation invariant texture classification with local binary patterns[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002, 24(7): 971-987. doi: 10.1109/TPAMI.2002.1017623 [15] HUANG Di, SHAN Cai-feng, WANG Yun-hong, et al. Local binary patterns and its application to facial image analysis: a survey[J]. IEEE Transactions on System, Man, and Cybernetics—Part C: Applications and Reviews, 2011, 41(6): 765-781. doi: 10.1109/TSMCC.2011.2118750 [16] ZHAO Guo-ying, PIETKAINEN M. Dynamic texture recog-nition using local binary patterns with an application to facial expressions[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2007, 29(6): 915-928. [17] AHONEN T, HADID A, PIETIKAINEN M. Face description with local binary patterns: application to face recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelli-gence, 2006, 28(12): 2037-2041. [18] DAVIS J, GOADRICH M. The relationship between precisionrecall and ROC curves[C]∥ICML. Proceedings of the 23rd International Conference on Machine Learning. Pittsburgh: ICML, 2006: 233-240. [19] 揣锦华, 李续龙, 许宏科. 基于视频图像处理的交通流检测方法[J]. 长安大学学报: 自然科学版, 2005, 25(6): 86-89. https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200505020.htmCHUAI Jin-hua, LI Xu-long, XU Hong-ke. Traffic flow detection method based on video images processing[J]. Jour-nal of Chang'an University: Natural Science Edition, 2005, 25(6): 86-89. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200505020.htm [20] 连静, 王珂, 杨兆升. 结合信号配准技术的小波多尺度车辆边缘检测方法[J]. 中国公路学报, 2007, 20(5): 95-100. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200705018.htmLIAN Jing, WANG Ke, YANG Zhao-sheng. Method of wavelet multi-scale vehicle edge detection combined with signal registration technology[J]. China Journal of Highway and Transport, 2007, 20(5): 95-100. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200705018.htm [21] 马奔, 史忠科, 张宇. 移动目标的自动监视报警方法[J]. 长安大学学报: 自然科学版, 2007, 27(2): 103-106. https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200702027.htmMA Ben, SHI Zhong-ke, ZHANG Yu. Auto-monitoring method for moving object[J]. Journal of Chang'an University: Natural Science Edition, 2007, 27(2): 103-106. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200702027.htm [22] 高韬, 刘正光, 岳士宏, 等. 用于智能交通的运动车辆跟踪算法[J]. 中国公路学报, 2010, 23(3): 89-94. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201003015.htmGAO Tao, LIU Zheng-guang, YUE Shi-hong, et al. Moving vehicle tracking algorithm used for intelligent traffic[J]. China Journal of Highway and Transport, 2010, 23(3): 89-94. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201003015.htm -

 下载:
下载:











计量
- 文章访问数: 927
- HTML全文浏览量: 155
- PDF下载量: 1087
- 被引次数: 0
