

Adaptive thresholds edge detection of traffic image
Article Text (Baidu Translation)
-
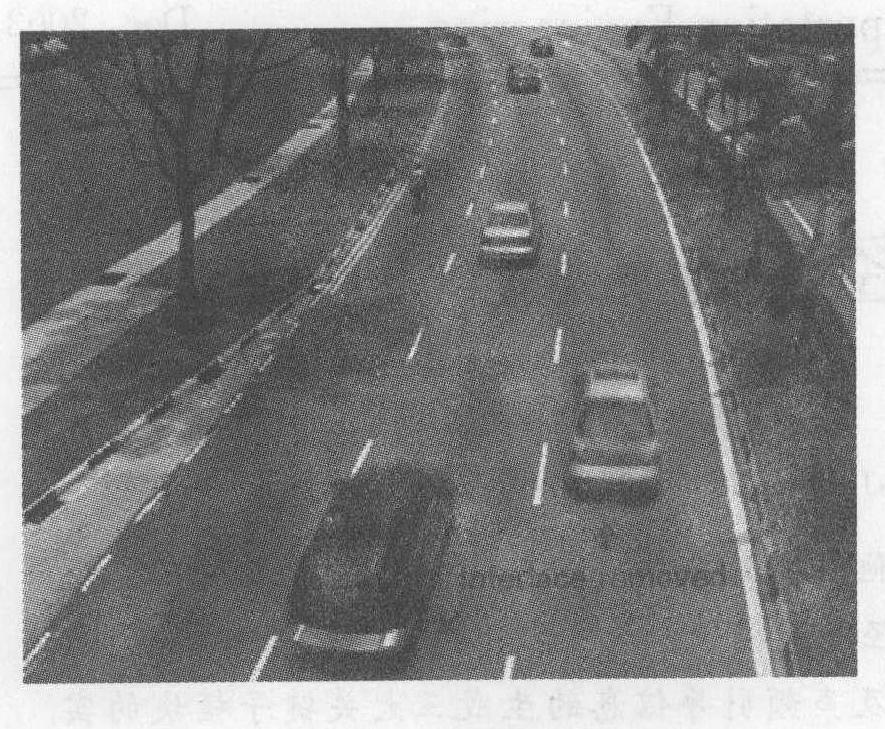
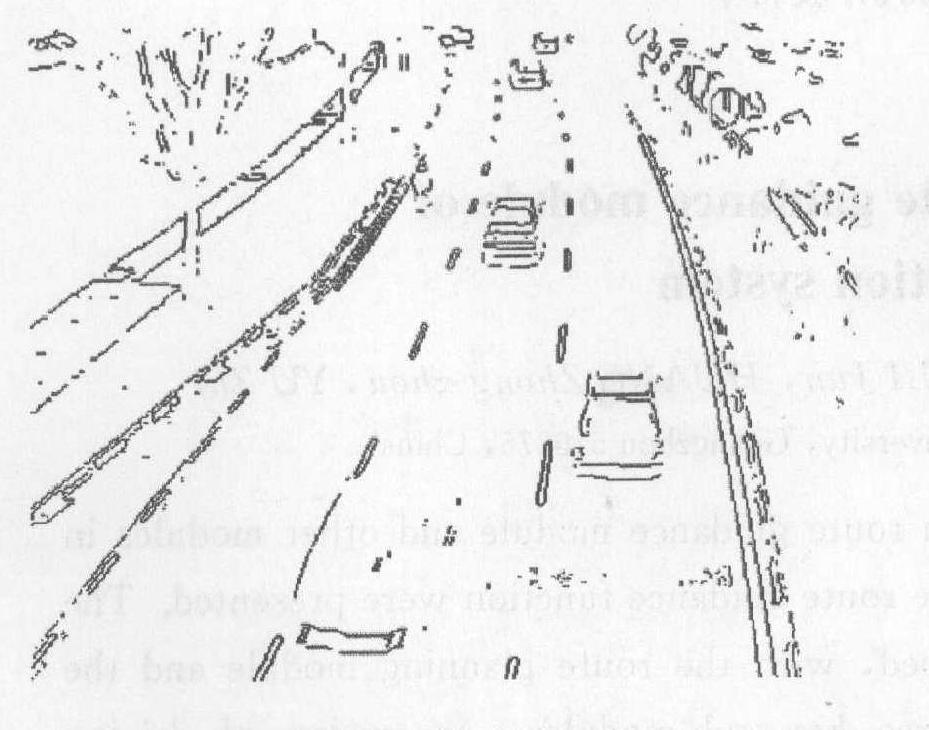
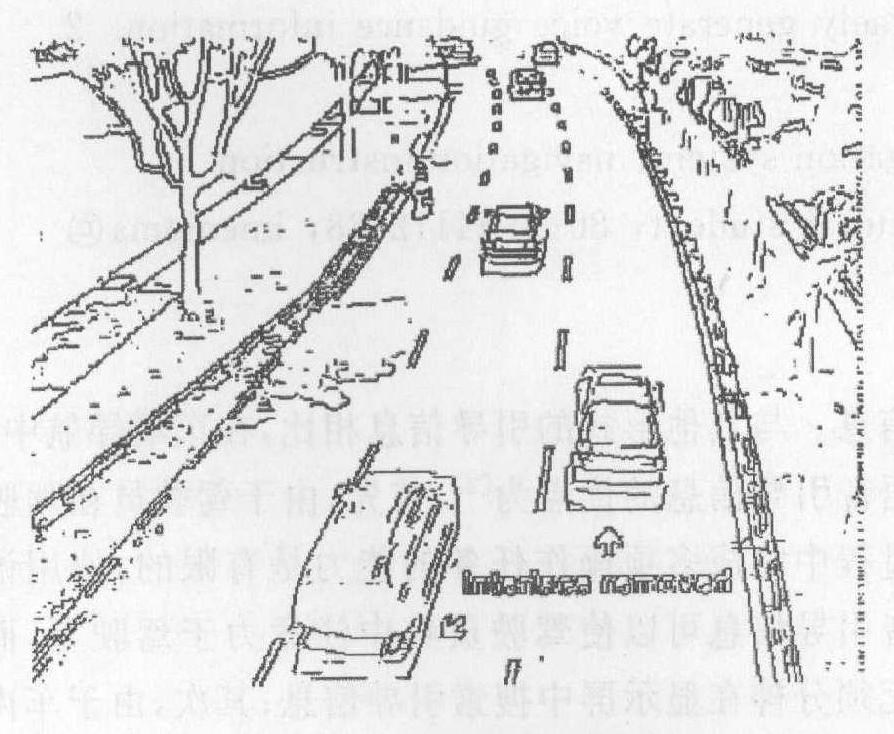
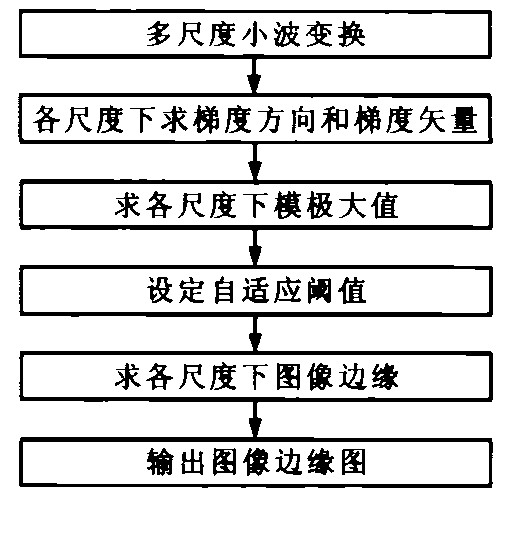
摘要: 应用小波变换对视频交通图像进行边缘检测, 研究了边缘评价指标、尺度对性能指标的影响及自适应阈值边缘检测, 并与经典的边缘检测Sobel算子进行了对比。提出用大尺度滤波器去抑制原图像的噪声, 可靠地识别噪声; 而用小尺度滤波器为图像边缘精确定位, 并构造出紧支二次B样条小波。结果表明, 二次B样条小波边缘检测方法具有计算量小, 抗噪能力和适应能力强, 且有改进余地等优点, 仿真效果也明显好于经典的Sobel算子。Abstract: The edge of traffic image was detected with wavelet transform. Its scale influence, meteyard and adaptive thresholds were studied. Large scale filter was used to restrain and identify noise, while small scale fiter was used to precisely position for image edge. A quadric B-spline wavelet was constructed, which has eminent characters, such as narrow support, small computation amount. Simulation results prove its effect is better than that of classical Sobel operator, the former method has good anti-noise and adaptive ability.
-
Key words:
- traffic monitoring /
- wavelet transform /
- edge detection /
- quadric B-spline /
- adaptive thresholds
-
[1] Canny J. A computational approach to edge detection[J]. IEEETrans., PAMI, 1986, 8(6): 679-698. [2] Fathy M, Siyal M Y. A window-based image processing tech-nique for quantitative and qualitative analysis of road traffic pa-rameters[J]. IEEE Trans., 1998, 47(4): 1342-1349. [3] Fathy M, Siyal M Y. Real-time image processing approach tomeasure traffic queue parameters[J]. IEE Proceedings-Vision, Image and Signal Processing, 1995, 142(5): 297-303. [4] Picton P D. Tracking and Segmentation of Moving Objects in aScene[M]. Warwick, UK, 1989. [5] Fathy M, Siyal M Y. An image detection technique based onmorphological edge detection and background differencing forreal-time traffic analysis[J]. Pattern Recognition Letters, 1995, 16(12): 1321-1330. [6] Ashworth R, Darkin D G, Dickinson K W, et al. Applications ofvideo image processing for traffic control systems[A]. SecondInternational Conference on Road Traffic Control[C]. London, UK, 1985. [7] Mallat S G, Zhong S. Characterization of signal from multi-scales edges[J]. IEEE Trans., PAMI, 1992, 14(7): 701-732. -

 下载:
下载:

图(4) / 表(1)
计量
- 文章访问数: 698
- HTML全文浏览量: 289
- PDF下载量: 412
- 被引次数: 0
