

Flexible multibody system dynamics predicting method of high-speed vehicle handling
Article Text (Baidu Translation)
-
摘要: 为了评价、鉴定汽车在高速公路上高速行驶时的操纵性, 运用柔性多体系统动力学方法, 建立了基于ADAMS软件平台的整车刚柔耦合多体系统操纵动力学仿真分析模型。对模型中柔性体, 应用有限元分析软件ANSYS进行模态分析, 利用ADAMS/Flex模块, 将模态变形融入柔性多体系统的运动学、动力学仿真中。通过"转向盘中间位置的仿真", 得到了转向盘力输入的主要评价指标值, 仿真计算与实测结果最大误差在10%以内。因此, 在汽车设计阶段, 可以利用柔性多体模型较准确地预测汽车在高速公路上高速行驶时的操纵性, 并可替代实车测量方法。Abstract: In order to evaluate the handling of high-speed vehicle, taking the vehicle with a standard structure as its object of study, and using flexible multibody system dynamics method, this paper founded the subsystem models of steering, suspension, tire, body and the dynamics analysis model of automotive handling and stability based on ADAMS software platform. As to the flexible part in the models, the finite element analysis software, ANSYS, was used to process model analysis, and the ADAMS/Flex module was employed to amalgamate the module deformation into the kinematic and dynamics simulation. The major assessment target of steering wheel torque input was obtained by the simulation of steering wheel center location. The error of simulating data compared with the testing data is less then 10%. So in the vehicle design phase, the flexible multibody model can be used to predict the handling of high-speed vehicle, and substitute the sample test.
-
Key words:
- vehicle engineering /
- automotive dynamics /
- flexible mutibody dynamics /
- handling
-

图 4 扭转梁式后桥有限元模态分析模型
Figure 4. Figi4 Finite element mode analysis model of torsion beam rear axle
表 1 扭转梁式后桥有限元模态分析结果
Table 1. Finite element mode analysis results of torsion beam rear axle
模态阶数 1 2 3 4 5 频率/Hz 235.8 294.0 605.4 913.5 942.7 模态阶数 6 7 8 9 10 频率/Hz 1 098.7 1 145.1 1 229.6 1 269.0 1 349.3  下载: 导出CSV
下载: 导出CSV
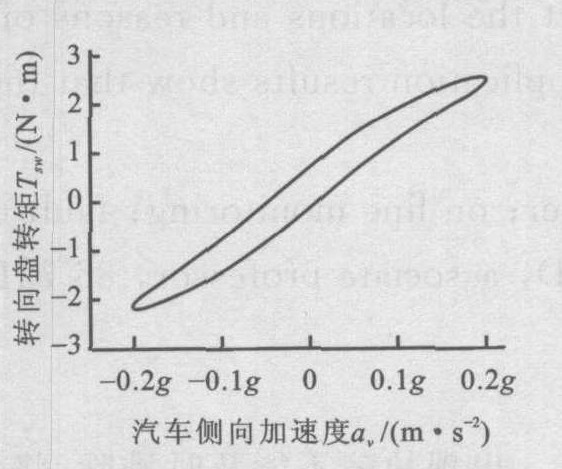
表 2 转向盘力输入的主要评价指标值
Table 2. Major assessment targets of steering wheel torque input
评价指标 仿真值 测量值 转向盘转矩为0时的侧向加速度/(m·s-2) 0.676 0.735 侧向加速度为0时的转向盘转矩/(N·m) 0.694 0.791 侧向加速度为0时的转向盘转矩梯度/(N·m) 149.45 159.94 侧向加速度为0.1g时的转向盘转矩/(N·m) 1.92 2.02 侧向加速度为0.1g时的转向盘转矩梯度/(N·m) 91.24 96.73
下载: 导出CSV
-
[1] Hugo S R. Vehicle handling responses using stability derivatives[J]. SAE Transactions, 960483: 516-536. [2] [德]H-P威鲁麦特. 车辆动力学模拟及其方法[M]. 北京: 北京理工大学出版社, 1998. [3] 郭孔辉. 汽车操纵动力学[M]. 吉林: 吉林科学技术出版社, 1991. [4] 陆佑方. 柔性多体系统动力学[M]. 北京: 高等教育出版社, 1996. [5] 余志生. 汽车理论[M]. 北京: 机械工业出版社, 1990. -


图(5) / 表(2)
计量
- 文章访问数: 1020
- HTML全文浏览量: 267
- PDF下载量: 352
- 被引次数: 0
