

Optimal path algorithm of road network with traffic restriction
Article Text (Baidu Translation)
-
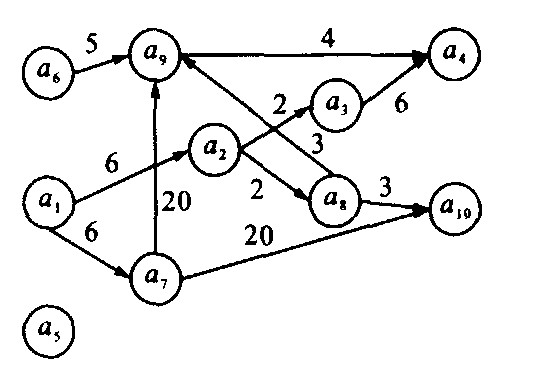
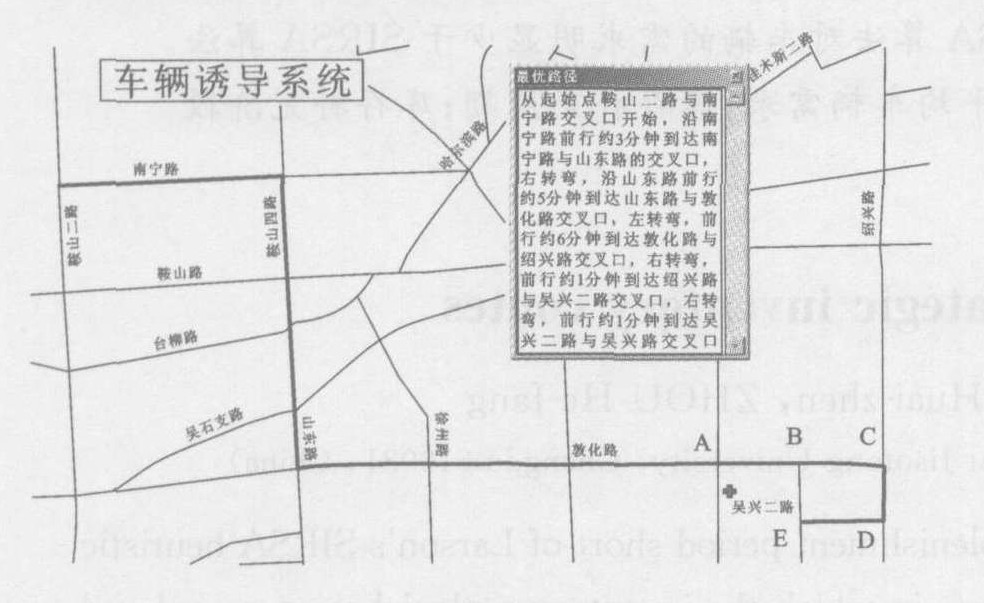
摘要: 为了解决车辆诱导系统中复杂道路结构表达及因为城市道路交通信号管理而产生的最优路径选择求解的复杂性, 依据图论中最短路径算法的基本原理, 提出了含有禁行路线路网的最优路径求解算法。以行程时间最少为目标, 按照网络转化法把含有禁行路线的路网转化为不含有禁行路线的路网, 采用邻接节点矩阵和邻接节点权矩阵实现了道路节点关系的表达, 改善了传统的Dijkstra算法, 将全局节点路径的求解转化为与求解节点紧密联系的局部区域求解, 将所研究的网络转化方法和改进的路径寻优算法应用于车辆诱导系统。结果表明应用该算法能够在含有禁行路线的路网中求解最优路径, 减少了问题求解的路网节点数, 提高了计算效率。Abstract: Based on the principle of the shortest path algorithm in graphic theory, this paper described the optimal path solution in practical urban road network, which includes traffic control signal. The characteristics of road network with restricted routes were analyzed, the corresponding mathematic model was constructed to convert it into another road network with free routes. The relationship of road network joints was expressed, the traditional Dijkstra algorithm was optimized by dynamic adjacent node relation matrix and adjacent node weight matrix, the corresponding algorithm was constructed. A vehicle guidance system was developed with the optimized Dijkstra algorithm to find the optimal routes in the network. The results indicate that the system can reduce the computation nodes of road networks.
-
Key words:
- traffic planning /
- road network /
- vehicle guidance system /
- optimal path algorithm /
- traffic restriction
-
[1] 刘灿齐. 车流在交叉口分流向延误的最短路径及算法[J]. 同济大学学报, 2002, 30(1): 52-53. https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ200201010.htmLIU Can-qi. Shortest path including deday of each flow at intersection and its algorithm[J]. Journal of Tongji University, 2002, 30(1): 52-53. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ200201010.htm [2] 郑祖武. 现代城市交通[M]. 北京: 人民交通出版社, 1998. [3] 张长健. 新型交通监控指挥自动化系统设计[J]. 计算机工程与设计, 2001, 22(3): 44-46. https://www.cnki.com.cn/Article/CJFDTOTAL-SJSJ200103011.htmZHANG Chang-jian. A novel traffic monitoring and command automation system design[J]. Computer Engineering and Design, 2001, 22(3): 44-46. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SJSJ200103011.htm [4] Dial R B. A computational analysis of alternative algorithms and labeling techniques for finding shortest path trees[J]. Network, 1979, 25(3): 215-248. [5] Benjamin Zhan F. Three fastest shortest path algorithms on real road networks[J]. Journal of Geographic Information and Decision Analysis, 1995, 1(1): 69-82. [6] 严尉敏, 吴伟民. 数据结构[M]. 北京: 清华大学出版社, 1997. [7] 张飞舟. 智能交通系统中的公交车辆调度方法研究[J]. 中国公路学报, 2003, 16(2): 82-85. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200302020.htmZHANG Fei-zhou. Research on dispatching methods of public traffic vehicles in intelligent transport system[J]. China Journal of Highway and Transport, 2003, 16(2): 82-85. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200302020.htm [8] 李军. 车辆优化调度可视化系统[J]. 交通运输工程学报, 2004, 4(1): 80-83. cle/id/200401020LI Jun. Vehicle visual scheduling system[J]. Journal of Traffic and Transportation Engineering, 2004, 4(1): 80-83. (in Chinese) cle/id/200401020 -

 下载:
下载:


图(4)
计量
- 文章访问数: 1048
- HTML全文浏览量: 354
- PDF下载量: 718
- 被引次数: 0
