

Optimum-preview control model of rail vehicle active suspension
-
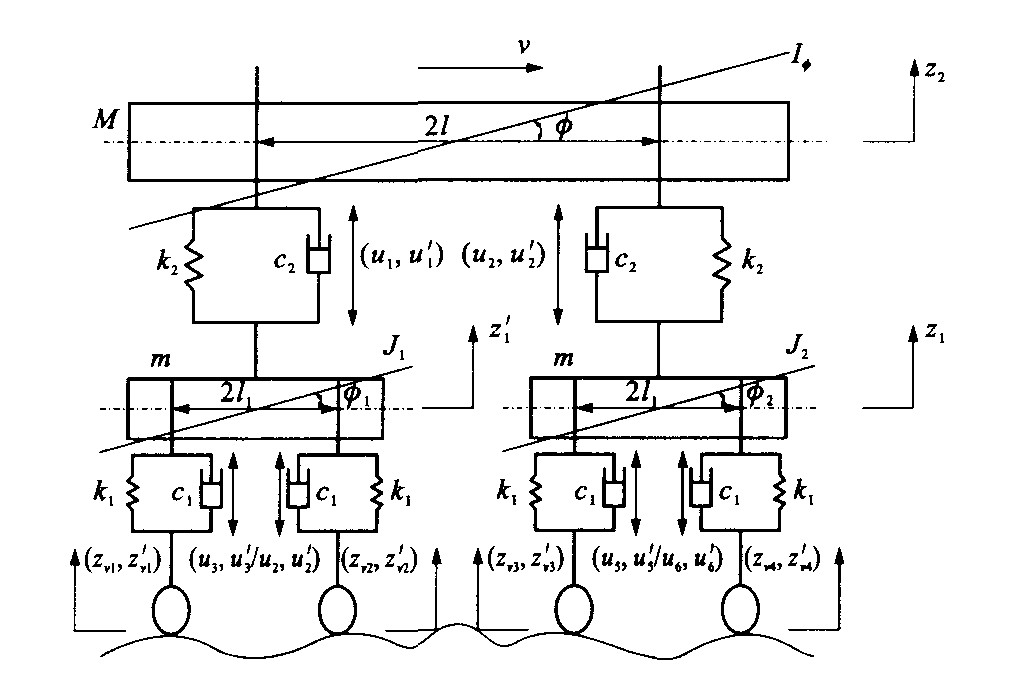
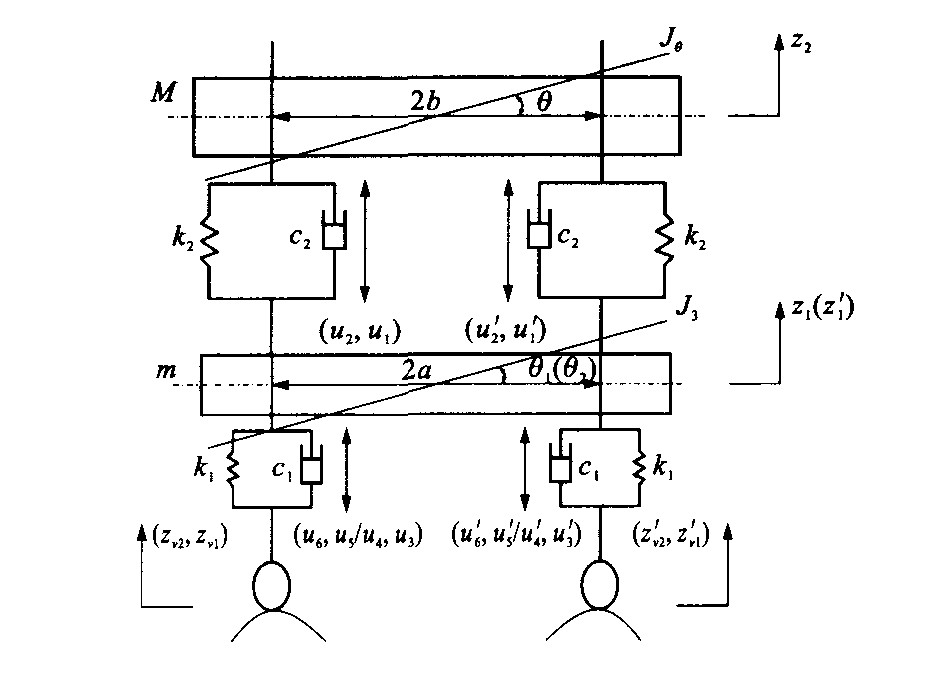
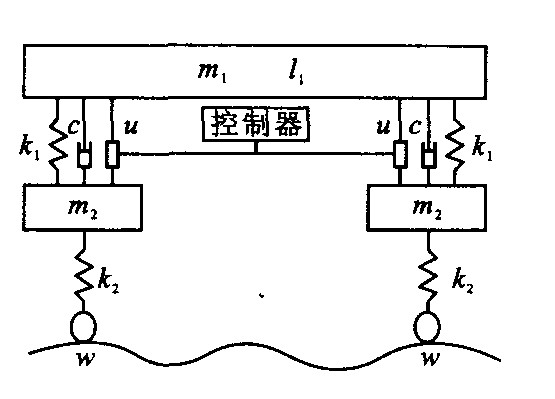
摘要: 以复杂多自由度的车辆系统设计模型代替传统的简化模型, 建立了主动悬挂控制车辆系统模型, 设计了最优预见控制器, 研究了车体的浮沉、点头、侧滚3种运动状态在加控制和未加控制时的路面激扰响应。仿真计算结果表明在最优控制下车体的浮沉响应降低了27%, 点头响应降低了30%, 侧滚响应降低了30%;在预见控制二次加权矩阵的作用下, 车体的浮沉响应降低了54%, 点头响应降低了50%, 侧滚响应降低了45%;根据预见控制的提前预见可适时响应的特点, 系统可按设定目标预见步数提前作出响应, 由此验证了最优预见控制在复杂多自由度的车辆主动悬挂设计模型中应用的可行性和有效性。Abstract: Based on the design model of multi-degrees of freedom, a new modelling method of rail vehicle system with active suspension was put forward, a kind of optimum-preview controller was designed to restrain the vertical vibration, nodding and rolling of carbody, the system respond with controller was analysed.Simulation results indicate that the vertical vibration, nodding and rolling levels of carbody are reduced by about 27%, 30%, 30% respectively using optimum control method, and the levels of carbody are reduced by about 54%, 50%, 45% respectively using preview control method, preview control strategy can make vehicle system respond ahead according to target value.It is feasible that the optimum-preview controller is used in designning the active suspension of rail vehicle system based on complex multi-degrees of freedom model.
-

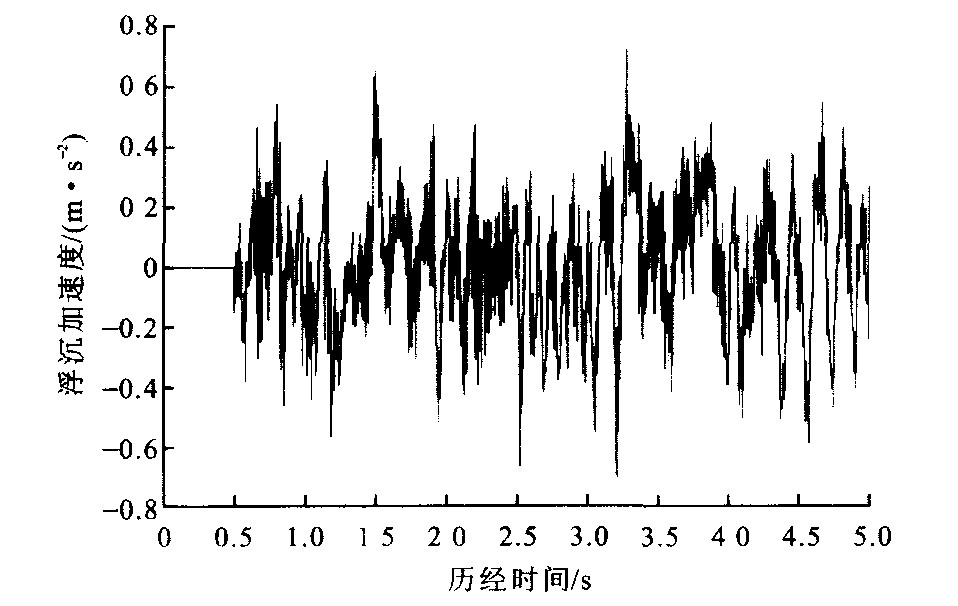
图 4 车体质心无控制浮沉加速度
Figure 4. Vertical acceleration of carbody mass center without control

图 5 车体质心最优控制浮沉加速度
Figure 5. Vertical acceleration of carbody mass center under optimum control

图 6 车体质心预见控制浮沉加速度
Figure 6. Vertical acceleration of carbody mass center under preview control

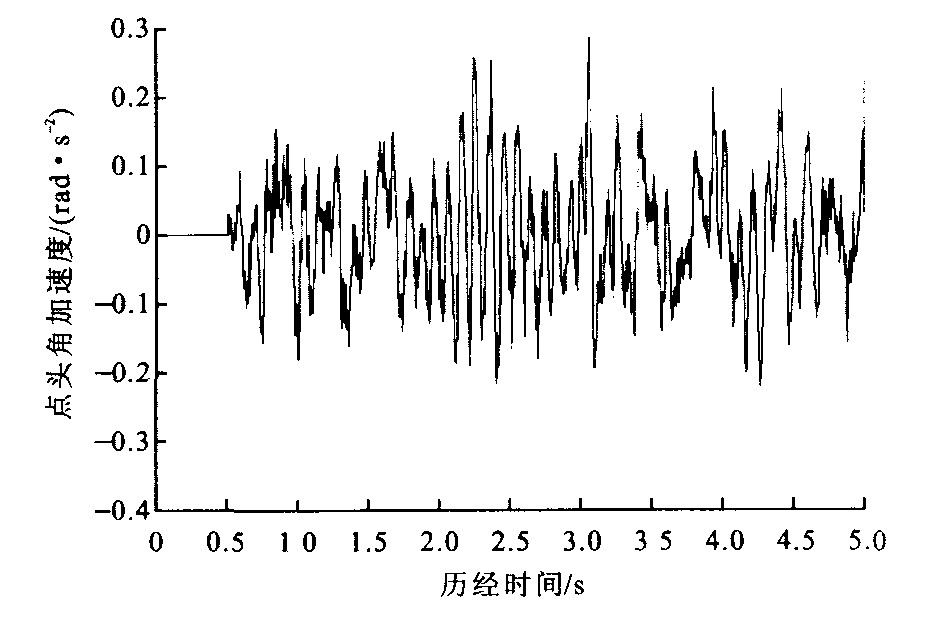
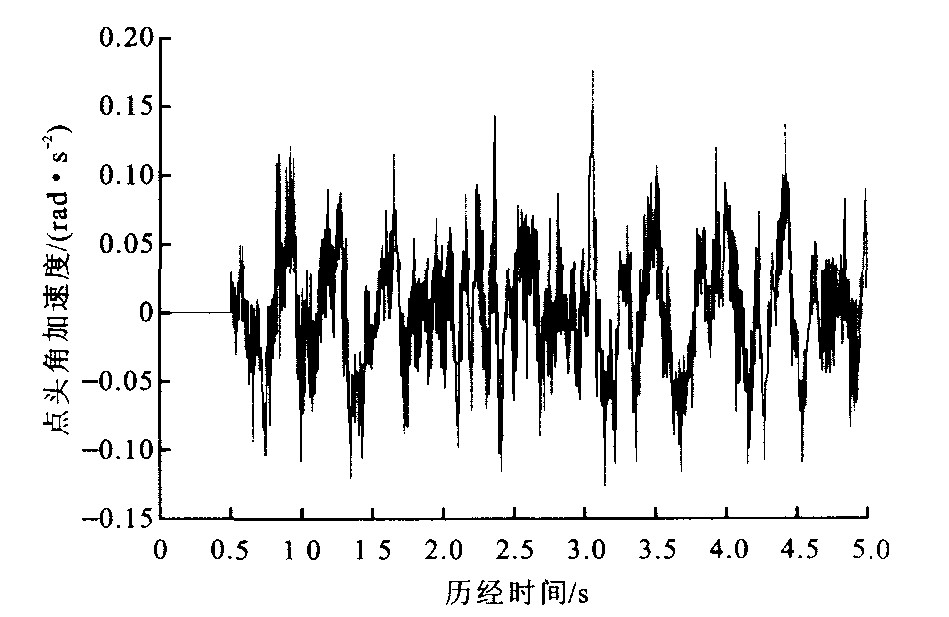
图 8 车体点头最优控制角加速度
Figure 8. Angular acceleration of carbody nodding under optimum control

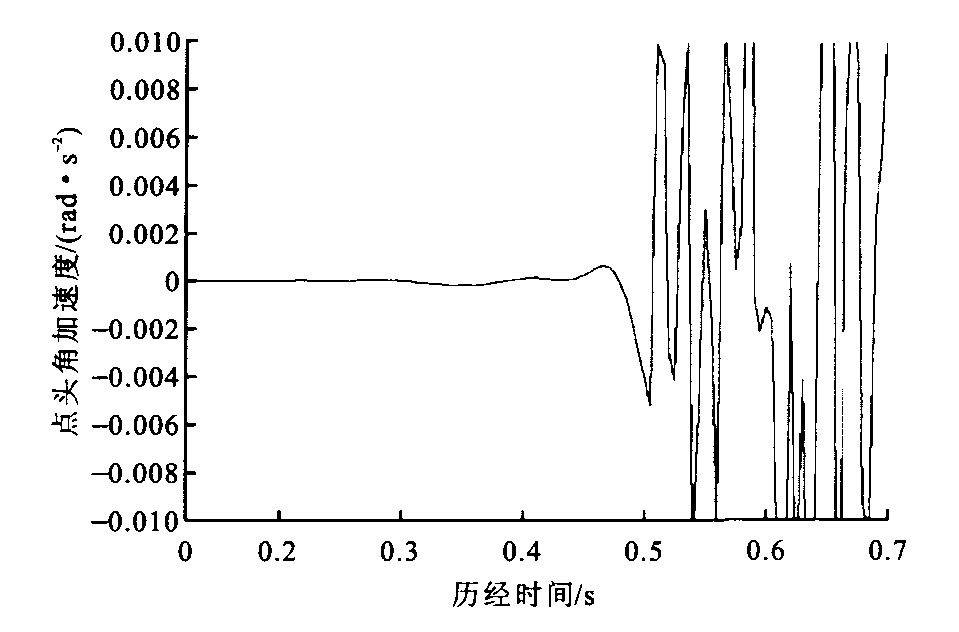
图 9 车体点头预见控制角加速度
Figure 9. Angular acceleration of carbody nodding under preview control

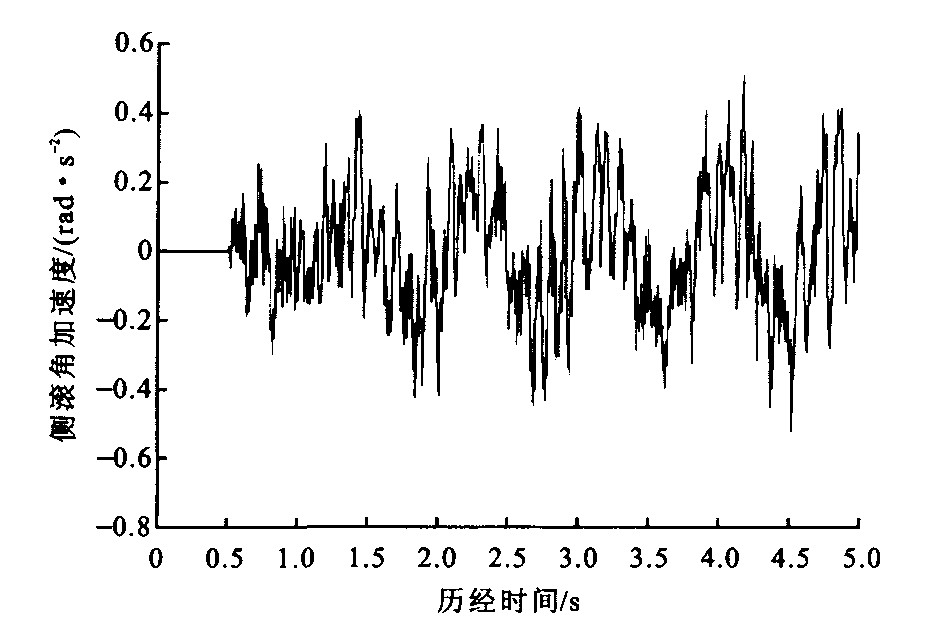
图 11 车体侧滚最优控制角加速度
Figure 11. Angular acceleration of carbody rolling under optimum control

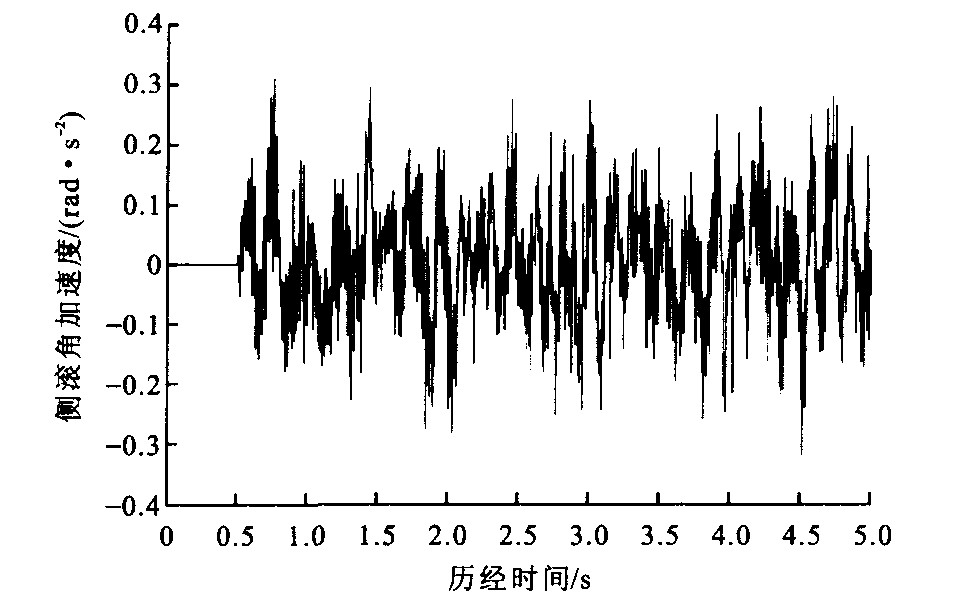
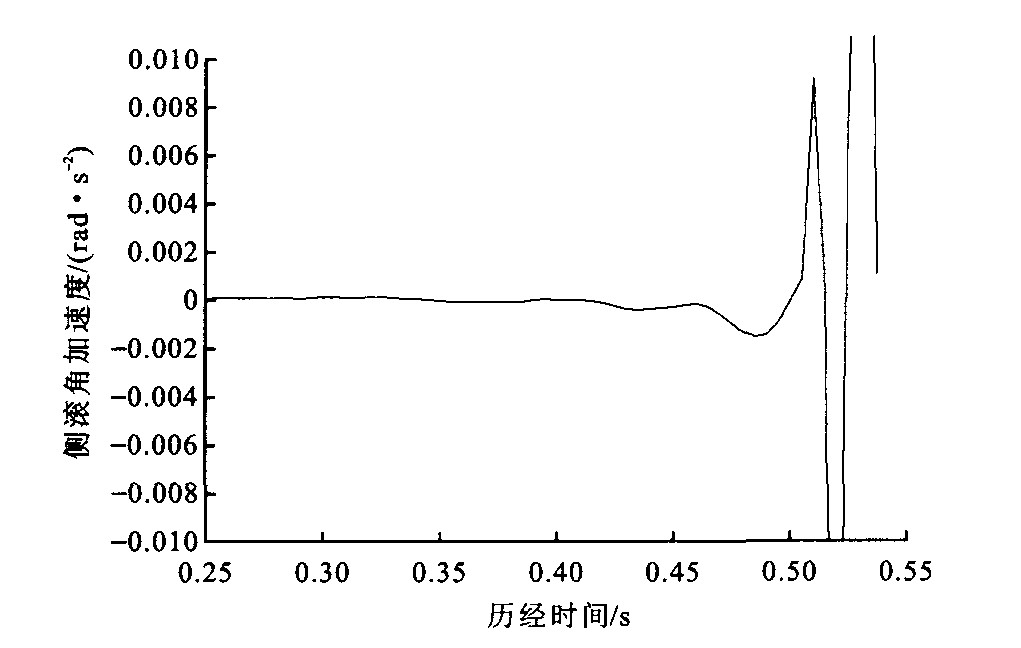
图 12 车体侧滚预见控制角加速度
Figure 12. Angular acceleration of carbody rolling under preview control

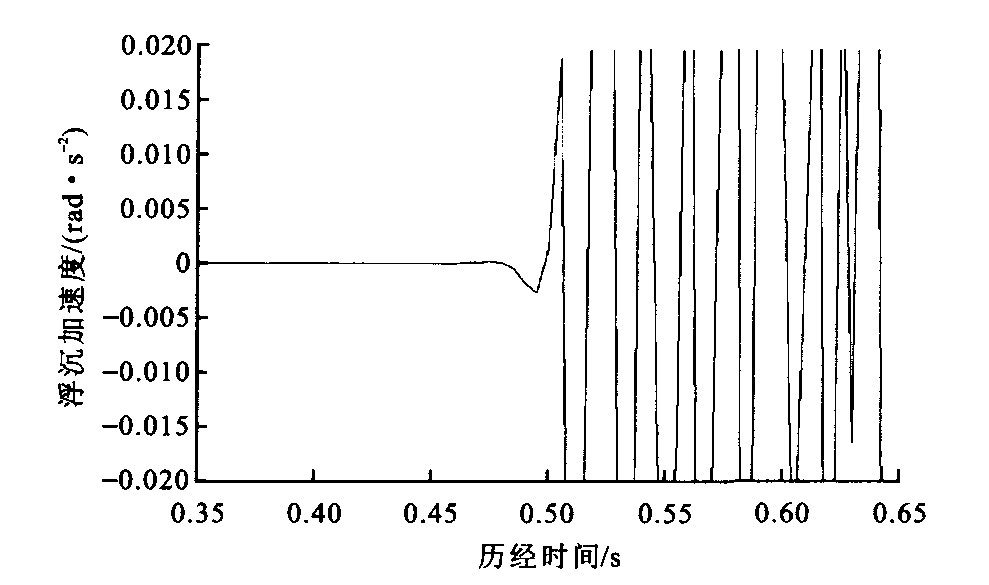
图 13 车体质心预见控制浮沉加速度局部放大
Figure 13. Part amplification of vertical acceleration of carbody mass center under preview control

图 14 车体点头预见控制角加速度局部放大
Figure 14. Part amplification of angular acceleration of carbody nodding under preview control

图 15 车体侧滚预见控制角加速度局部放大
Figure 15. Part amplification of angular acceleration of carbody rolling under preview control
表 1 车辆模型参数
Table 1. Parameters of vehicle model
车体质量M/kg 47 000 前转向架质量m/kg 2 400 后转向架质量m/kg 2 400 车体点头转动惯量Iϕ/(kg·m2) 1 315 600 前转向架点头转动惯量J1/(kg·m2) 6 330 后转向架点头转动惯量J2/(kg·m2) 6 330 一系悬挂弹簧垂向刚度k1/(N·m-1) 2 399 600 二系悬挂弹簧垂向刚度k2/(N·m-1) 874 400 二系垂向阻尼c2/(N·s·m-1) 18 750 一系垂向阻尼c1/(N·s·m-1) 18 750 前、后转向架构架侧滚转动惯量J3/(kg·m2) 2 100  下载: 导出CSV
下载: 导出CSV
-
[1] Roger G. Active railway suspension imlementation status and technological trends[J]. Vehicle System Dynamics, 1997, 28 (2): 87-98. https://www.cnki.com.cn/Article/CJFDTOTAL-DLXT201418023.htm [2] 戴焕云. 车辆主动悬挂的鲁棒控制研究[D]. 成都: 西南交通大学, 1999. [3] Wang Yong-gang, Gong Jing, Zhang Jing-hui. Dynamics of active structures and suspension system[J]. Mechanical Science and Technology, 2002, 21(Sup): 32-33. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MTKJ201910001.htm [4] 王福天. 车辆系统动力学[M]. 北京: 中国铁道出版社, 1994. [5] 刘少军. 现代控制方法及计算机辅助设计[M]. 长沙: 中南大学出版社, 2003. [6] Huiman R G M. Preview estimation and control for(semi-) active suspensions[J]. Vehicle System Dynamics, 1993, 22(2): 335-346. https://www.cnki.com.cn/Article/CJFDTOTAL-DLXT201409028.htm [7] 陆正刚, 沈刚. 试验型铰接式高速客车转向架动力学性能计算报告[R]. 上海: 上海铁道大学, 1996. [8] Wang Kai-yun, Zhai Wan-ming, Cai Cheng-biao. Method of equivalency transform for power spectrum density of track irregularity on central line form on left/right rail[J]. Journal of Traffic and Transportation Engineering, 2002, 2(3): 27-29. (in Chinese) http://transport.chd.edu.cn/article/id/200203006 -





计量
- 文章访问数: 2665
- HTML全文浏览量: 455
- PDF下载量: 655
- 被引次数: 0
