

Fuzzy adaptive control for ship steering autopilot based on backstepping technique
Article Text (Baidu Translation)
-
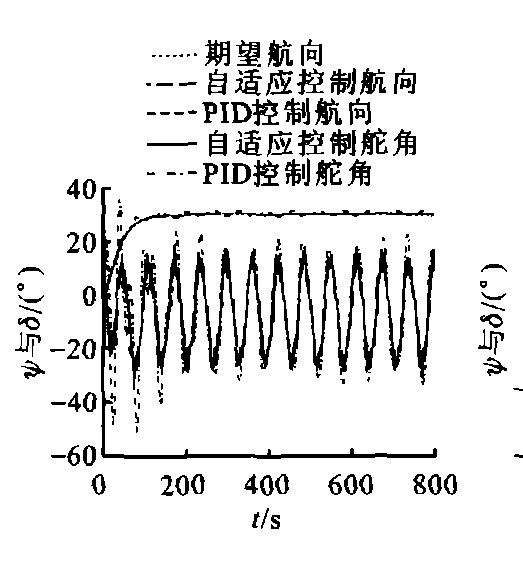
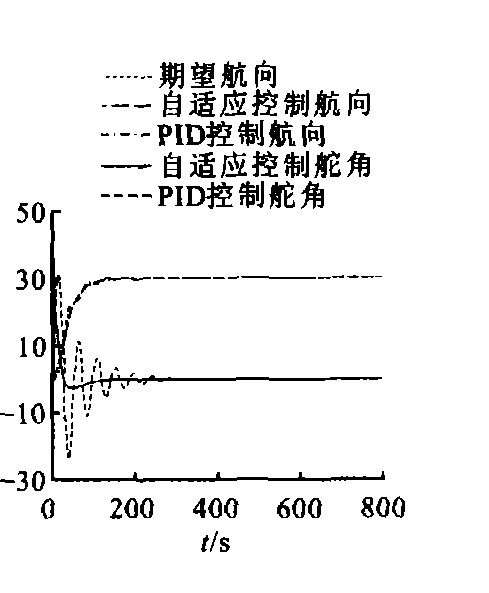
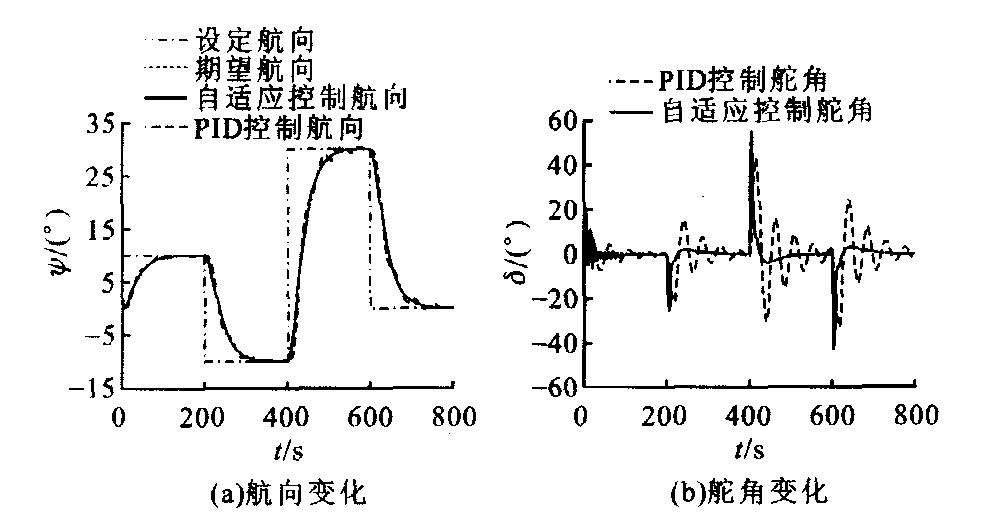
摘要: 针对诺宾(Norbin)非线性船舶模型, 基于反馈线性化方法和由径向基函数(RBF)神经网络构建的模糊系统的逼近能力, 提出了基于反馈线性化的船舶航向保持模糊自适应控制算法。运用泰勒级数展开的线性化技术, 使模糊系统的所有参数均可实时调节, 引入了鲁棒控制消除模糊逼近系统带来的误差, 在李雅普诺夫稳定性理论的基础上导出了自适应控制率。该算法可以确保闭环系统渐近稳定, 使系统的模型跟踪误差为0, 优于传统的PID控制策略, 具有良好的自适应能力。Abstract: In allusion to the nonlinear Norbin ship model, a new fuzzy adaptive control algorithm for ship steering autopilot based on backstepping technique and the approximation capability of the fuzzy system constructed by radial basis function(RBF) was put forward, all parameters of the fuzzy system were on-line tuned by Taylor linearization technique. A robust controller was employed to dispel the effect of the approximation error introduced by the fuzzy estimation system. The adaptation laws of the control system were derived based on Lyapunov function. Simulation result shows that the closed-loop control system of steering autopilot is asymptoticalry stable, the error of the output trajectory of ship model and a desired trajectory is zero. The proposed algorithm has better adaptive ability than traditional PID control algorithm.
-
Key words:
- marine engineering /
- ship autopilot /
- adaptive control /
- backstepping
-
[1] Krstic M. Nonlinear and Adaptive Control Design[M]. New York: Wiley, 1995. [2] Nomoto K. On the steering quality of ships[J]. International Shipbuilding Progress, 1957, 35(5): 354—370. [3] 杨盐生. 船舶运动控制研究[J]. 交通运输工程学报, 2003, 3(2): 34—39. http://transport.chd.edu.cn/article/id/200302008Yang Yan-sheng. Reviewon ship motion control[J]. Journal of Traffic and Transportation Engineering, 2003, 3(2): 34—39. (in Chinese) http://transport.chd.edu.cn/article/id/200302008 [4] 杨盐生. 船舶航向非线性系统的输出反馈鲁棒控制[J]. 交通运输工程学报, 2002, 2(1): 118—121. http://transport.chd.edu.cn/article/id/200201026Yang Yan-sheng. Output feedback robust control algorithm applied to ship steering autopilot with uncertain nonlinear system[J]. Journal of Traffic and Transportation Engineering, 2002, 2(1): 118—121. (in Chinese) http://transport.chd.edu.cn/article/id/200201026 [5] Lee C C. Fuzzylogic in control systems[J]. IEEE Transactions on Systems Man Cybernet, 1990, 20(2): 419—435. doi: 10.1109/21.52552 [6] Jang J S, Sun C T. Functional equivalence between radial basis function networks and fuzzy inference systems[J]. IEEE Transactions on Neural Networks, 1993, 4(1): 156—159. [7] Wang L X. Adaptive Fuzzy Systems and Control[M]. NJ: Prentice Hall, 1994. [8] Wang L X. Stable adaptive fuzzy control of nonlinear systems[J]. IEEE Transactions on Fuzzy Systems, 1993, 1(1): 146—155. [9] Narendra KS, Annaswamy A M. Stable Adaptive Systems[M]. NJ: Prentice Hall, 1989. -

 下载:
下载:
图(3)
计量
- 文章访问数: 729
- HTML全文浏览量: 295
- PDF下载量: 247
- 被引次数: 0
