

Effect of differential brake on braking stability of automobile
Article Text (Baidu Translation)
-
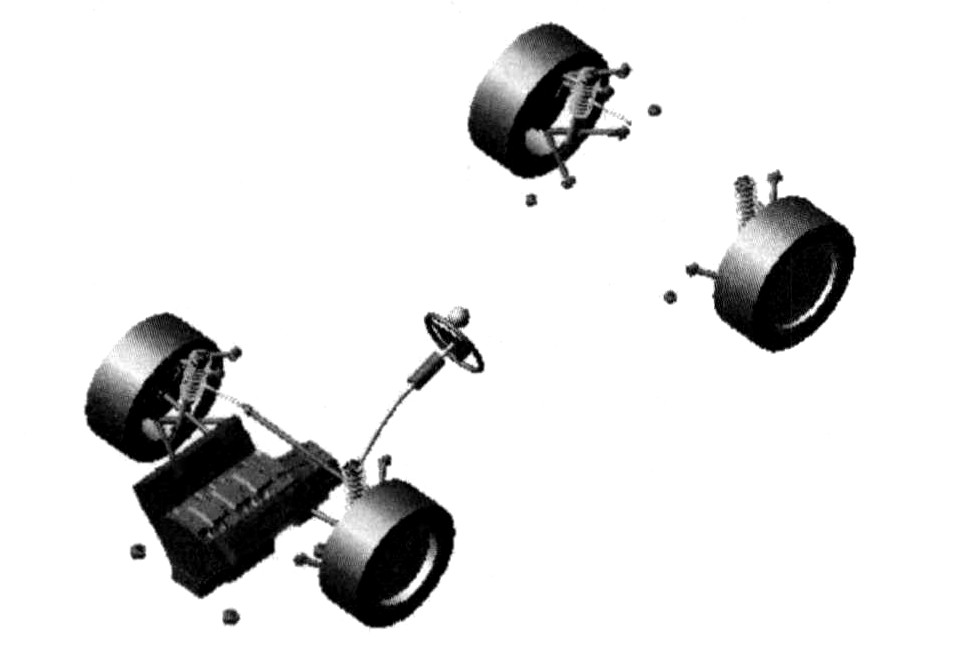
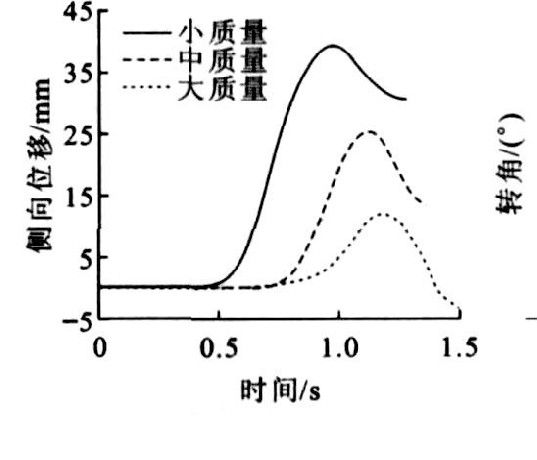
摘要: 为了提高汽车制动的安全性, 对差动制动的力学特性进行了分析, 运用ADAMS/Car软件建立了汽车各子系统动力学模型, 通过对主要子系统进行相应的设置, 建立了整车动力学仿真模型, 进行了直线制动及转弯制动稳定性仿真分析, 研究了差动制动对制动稳定性的影响。仿真结果表明: 差动制动方式可以减小汽车转弯制动时的质心侧偏角, 提高汽车的制动稳定性, 但汽车质量对于制动稳定性影响较大, 因此, 应用差动制动时应注意制动力分配方式, 并考虑质量变化的影响。Abstract: To improve the braking safety of automobile, the mechanics characteristic of differential brake was analyzed, automotive subsystems models were built by applying ADAMS/Car, automotive mechanics simulation model was built by setting some main subsystems, beeline braking stability and turning braking stability were simulated, and the effect of differential brake on the stabilities was studied. Simulation result shows that differential brake can reduce the side-slip angle of mass center for automobile, and improve its braking stability when turning braking, but the effect of automotive mass on its braking stability is great, so the distribution mode of braking force and the effect of mass change should be considered while applying differential brake.
-
Key words:
- automobile engineering /
- differential brake /
- braking stability /
- simulation analysis
-
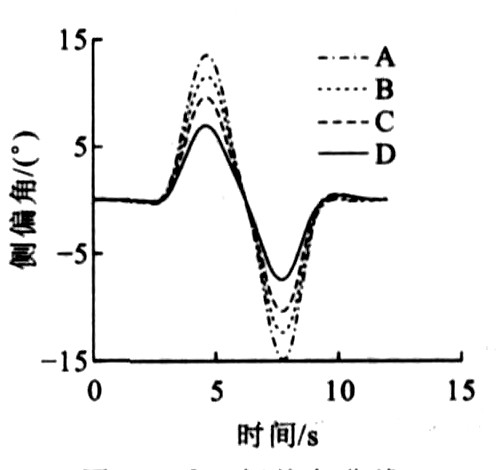
表 1 制动力
Table 1. Braking forces
N 工况 左前轮Flf 右前轮Frf 左后轮Flr 右后轮Frr A 300 300 300 300 B 350 250 250 350 C 400 200 200 400 D 450 150 150 450  下载: 导出CSV
下载: 导出CSV
-
[1] 高红红, 李平, 劳奇成, 等. 汽车制动性能检测系统的设计与分析[J]. 西安工业大学学报, 2006, 26(5): 435-438. doi: 10.3969/j.issn.1673-9965.2006.05.007Gao Hong-hong, Li Ping, Lao Qi-cheng, et al. Design and analysis of test system for automobile brake performance[J]. Journal of Xi'an Technological University, 2006, 26(5): 435-438.(in Chinese) doi: 10.3969/j.issn.1673-9965.2006.05.007 [2] 杨啟梁. 汽车制动过程中方向稳定性仿真分析[J]. 拖拉机与农用运输车, 2007, 34(1): 28-29. https://www.cnki.com.cn/Article/CJFDTOTAL-TLJY200701013.htmYang Qi-liang. Study on simulation of automobile braking stability[J]. Tractor and Farm Transporter, 2007, 34(1): 28-29.(in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TLJY200701013.htm [3] Pahngroc O, Zhou Hao, Kevin P. Stability control of combination vehicle[J]. SAE Paper 2001-01-0138. [4] Yasui Y, Tozu K. Improvement of vehicle directional stability for transient steering maneuvers using active brake control[J]. SAE Paper 960485. [5] Koibuchi K, Yamamoto M. Vehicle stability control in limit cornering by active brake[J]. SAE Paper 960487. [6] 何锋, 杨利勇, 刘章仪. 基于差动制动的防侧翻车辆动力学控制研究[J]. 现代机械, 2003, 30(5): 31-33. https://www.cnki.com.cn/Article/CJFDTOTAL-XDJX200305015.htmHe Feng, Yang Li-yong, Liu Zhang-yi. Study on differential-braking-based vehicle dynamics control with rollover prevention[J]. Modern Machinery, 2003, 30(5): 31-33. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XDJX200305015.htm [7] 郭孔辉, 丁海涛. 轮胎附着极限下差动制动对汽车横摆力矩的影响[J]. 汽车工程, 2002, 24(2): 101-104. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC200202002.htmGuo Kong-hui, Ding Hai-tao. The effect of yaw moment through differential braking under tire adhesion limit[J]. Automotive Engineering, 2002, 24(2): 101-104. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC200202002.htm [8] 王国林, 陆永华. 拖挂式房车差动制动稳定性[J]. 江苏大学学报: 自然科学版, 2006, 27(2): 130-132. https://www.cnki.com.cn/Article/CJFDTOTAL-JSLG200602008.htmWang Guo-lin, Lu Yong-hua. Braking stability analysis of car-trailer[J]. Journal of Jiangsu University: Natural Science Edition, 2006, 27(2): 130-132.(in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSLG200602008.htm [9] 周均, 张卓, 徐进, 等. ADAMS在汽车制动分析中的应用研究[J]. 机械设计与制造, 2006, 44(6): 54-56. https://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ200606025.htmZhou Jun, Zhang Zhuo, Xu Jin, et al. Research on the application of ADAMS in braking analysis of automobile[J]. Machinery Design and Manufacture, 2006, 44(6): 54-56.(in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ200606025.htm [10] Jiang Li-biao, Xie Dong. Development of full truck template in ADAMS/Car[J]. Journal of Harbin Institute of Technology, 2006, 13(2): 178-181. -





图(7) / 表(1)
计量
- 文章访问数: 1536
- HTML全文浏览量: 609
- PDF下载量: 639
- 被引次数: 0
