

Cooperative vehicle positioning method based on GNSS/DSRC fusion
-
摘要: 以全球导航卫星系统(GNSS)定位与专用短程无线通信(DSRC)协同定位的集成信息融合为目标, 在DSRC协同定位层面, 基于水平精度因子最小化原则, 提出了一种邻车节点的优选策略。在GNSS/DSRC融合定位层面, 采用分散式融合估计思想, 设计了一种松耦合模式下的车辆组合定位方法, 基于GNSS、DSRC并行滤波进行全局估计, 利用反馈策略改善了对不同定位条件的适应能力。利用车路协同仿真平台对协同车辆定位方法进行了仿真验证。验证结果表明: 邻车节点优选策略显著提升了DSRC定位精度, 将其用于GNSS/DSRC融合定位, 在常规运行条件下, 带反馈机制的分散式估计精度优于单传感器模式与无反馈分散式估计精度; 在给定的GNSS多径干扰条件下, 东向、北向位置估计的均方根误差与单GNSS模式相比分别降低了42.6%和37.0%, 与集中式融合估计相比分别降低了24.8%和20.3%。协同车辆定位方法的定位性能优于常规定位方案, 对GNSS多径干扰条件具有良好的适应能力, 具备更优的精确性、可用性及工程应用价值。Abstract: Aiming at the integration and information fusion of global navigation satellite system(GNSS)positioning and the cooperative positioning based on dedicated short-range communication(DSRC), an advanced selection strategy for neighborhood vehicle nodes for DSRC-based cooperative positioning was proposed based on the minimum principle of horizontal dilution of precision.For GNSS/DSRC integrated vehicle positioning, a loose-coupling positioning method was designed according to decentralized estimation scheme.In the positioning method, the parallel GNSS and DSRC filters were combined for global estimation, and the adaptive capability against different operation conditions was enhanced based on feedback strategy.The cooperative vehicle positioning method was verified by using a cooperative vehicle infrastructure simulation platform.Verification result indicates that the precision of DSRC-based positioning method was significantly improved by the selection strategy of neighborhood vehicle nodes.When the DSRCbased positioning method was used in the GNSS/DSRC integrated positioning, under normal operation condition, the precision of decentralized fusion estimation with feedback is better than that with single sensor mode and the decentralized estimation without feedback.Compared to the GNSS-alone mode under the given GNSS multipath interference condition, the root mean square errors of vehicle positioning method reduce by 42.6% and 37.0% in east and north direction respectively, and they reduce by 24.8% and 20.3% compared to the centralized fusion estimation.The performance of proposed positioning method is better than conventional positioning solutions, and has an enhanced tolerant ability to GNSS multipath interference conditions, which suggest the better precision, availability and practical application value of proposed method.
-

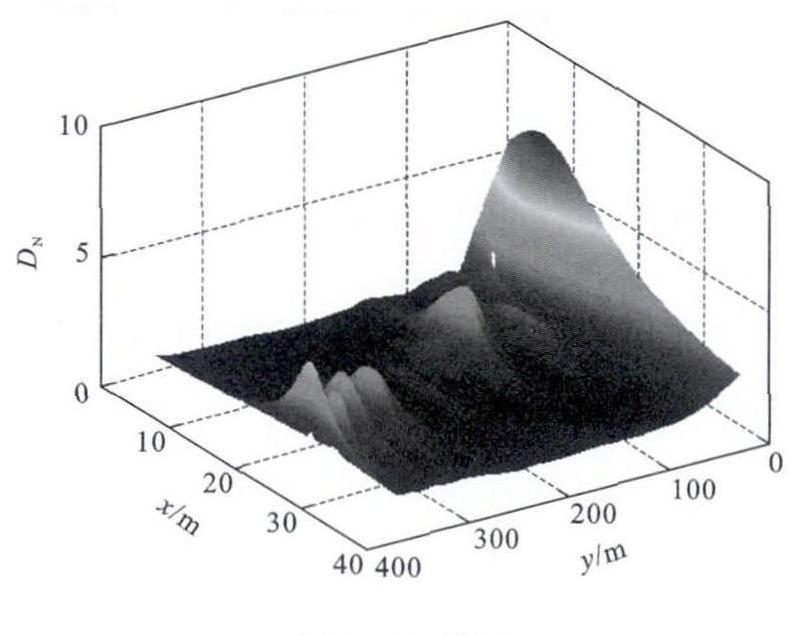
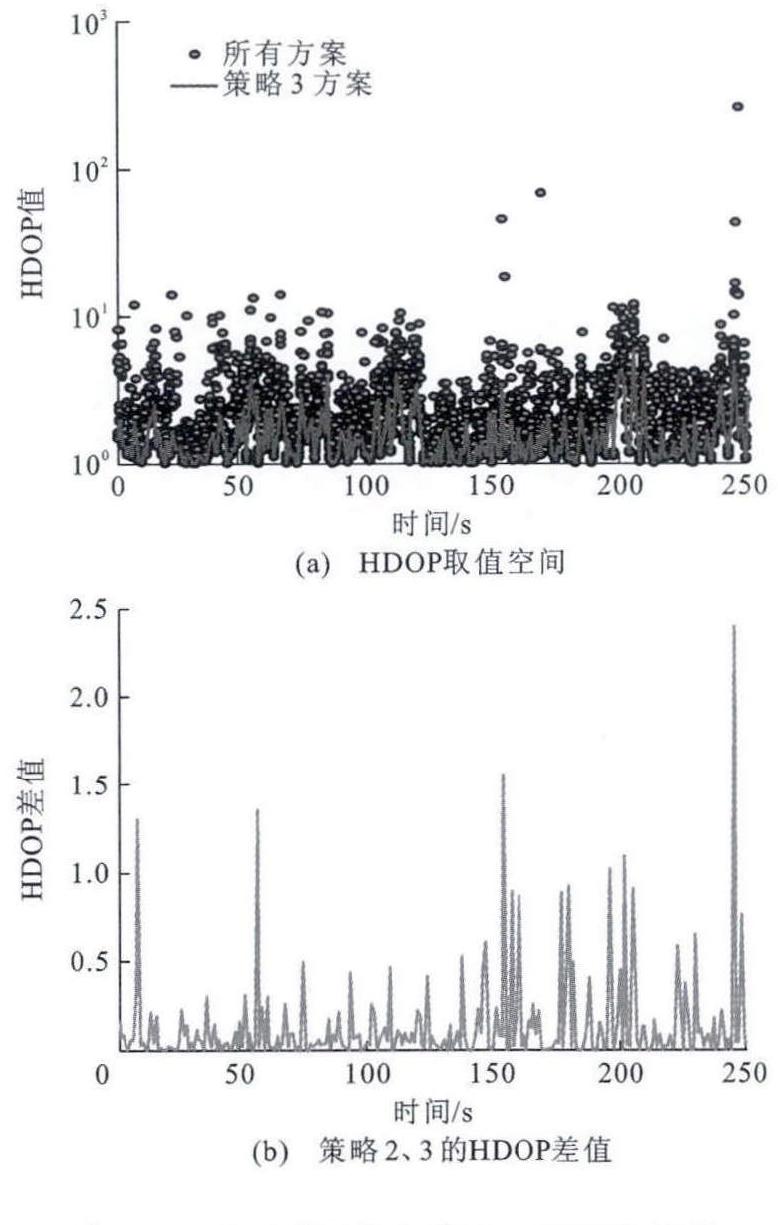
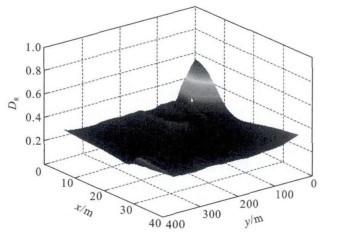
图 8 HDOP取值空间与策略2、3HDOP差值
Figure 8. Space of HDOP values and differences of HDOP values between strategy 2 and 3

图 10 六种策略东向定位误差比较
Figure 10. Comparison of positioning errors in east direction under six strategies

图 11 六种策略下北向定位误差比较
Figure 11. Comparison of positioning errors in north direction under six strategies

图 12 DSRC、GNSS滤波器信息分配系数
Figure 12. Information distribution coefficients of DSRC and GNSS filters

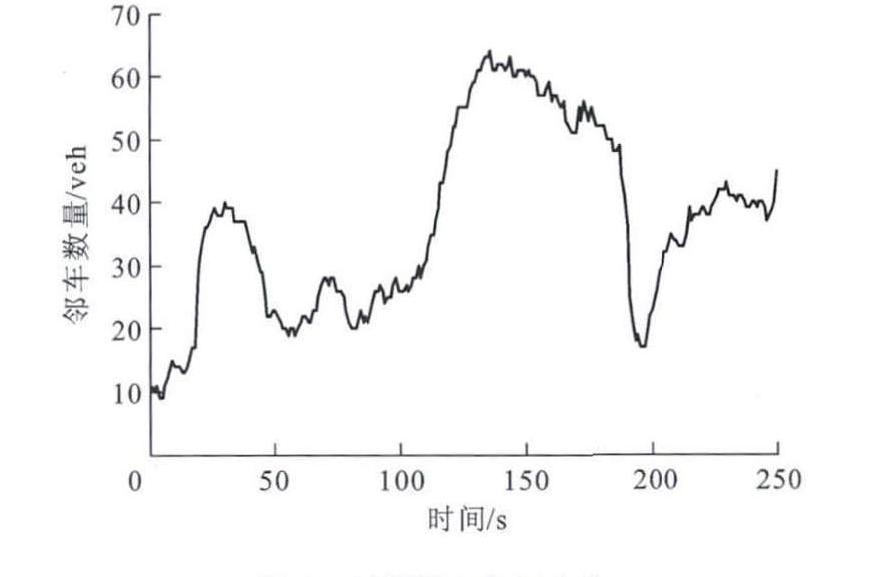
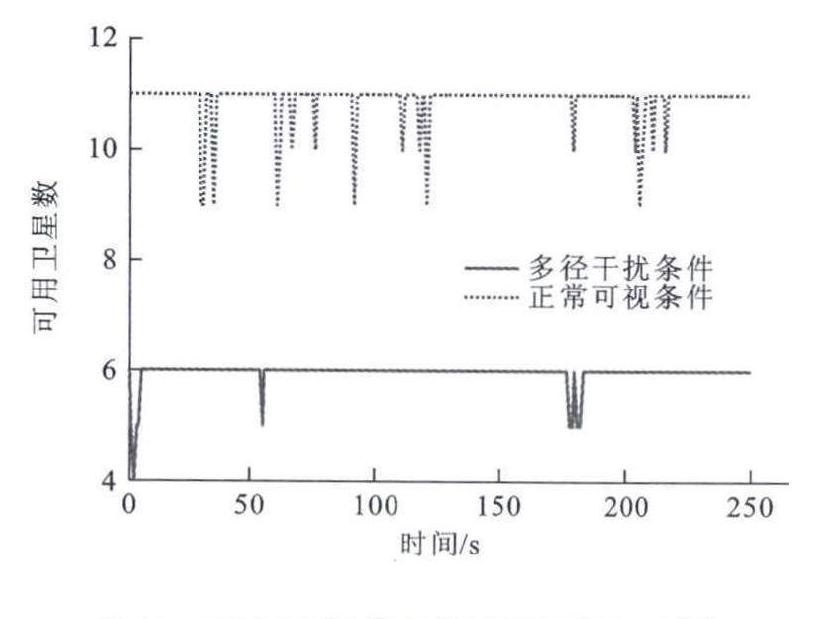
图 14 不同GNSS信号条件下的可用卫星数
Figure 14. Available satellite numbers under different GNSS signal conditions

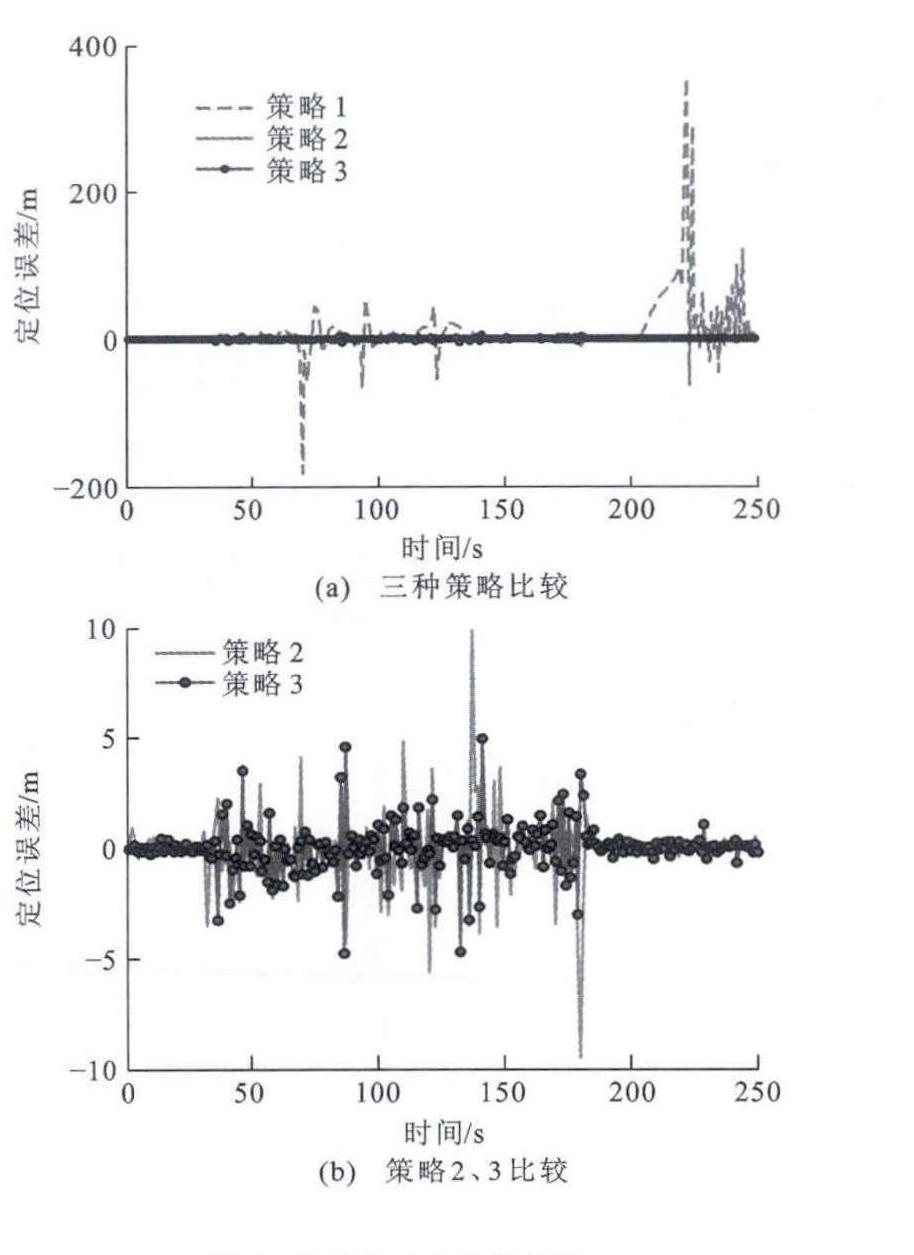
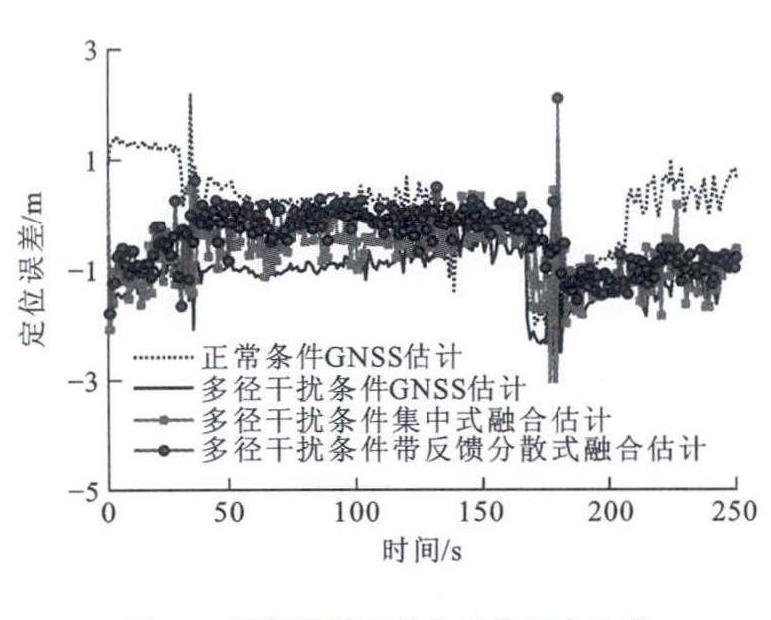
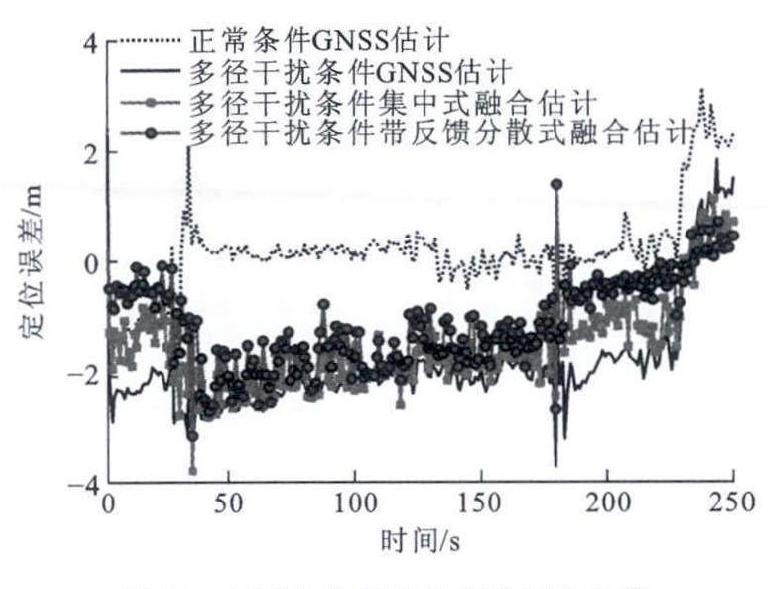
图 15 不同条件下东向定位误差比较
Figure 15. Comparison of positioning errors in east direction under different conditions

图 16 不同条件下北向定位误差比较
Figure 16. Comparison of positioning errors in north direction under different conditions
-
[1] 王云鹏, 易振国, 夏海英. 等. 基于流行病模型的车路协同预警信息交互方法[J]. 北京航空航天大学学报. 2011, 37(5): 515-518.WANG Yun-peng, Yl Zhen-guo. XIA Hai-ying, et al. Cooperative traffic alarming method based on epidemic model[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(5): 515-518. (in Chinese). [2] MATTERN N, OBST M, SCHUBERT R, et al. Simulative analysis of accuracy demands of co-operative localization in the COVEL project[C]//IEEE. Proceedings of 2011 IEEE Intelligent Vehicles Symposium. Baden-Baden: IEEE, 20111516-521. [3] SCHLINGELHOF M, BETAILLE D, BONNIFAIT P, et al. Advanced positioning technologies for co-operative systems[J]. IET Intelligent Transport Systems, 2008, 2(2): 81-91. [4] TOLEDOMOREO R. ZAMORA-IZQUIERDO M A, UBEDAMINARRO B, et al. High-integrity IMM-EKF-based road vehicle navigation with low-cost GPS/SBAS/INS[J]. IEEE Transactions on Intelligent Transportation Systems, 2007, 8(3): 491-511. doi: 10.1109/TITS.2007.902642 [5] 彭登, 徐建闽, 林培群. 城市车路协同系统的通信及定位技术研究[J]. 计算机工程与设计. 2011, 32(3): 859-862.PENG Deng, XU Jian-min, LIN Pei-qun. Research on communication of city cooperative vehicle infrastructure system and it's positioning technology[J]. Computer Engineering and Design, 2011, 32(3): 859-862. (in Chinese). [6] LI Hao, NASHASHIBI F, TOULMINET G. Localization for intelligent vehicle by fusing mono-camera, low-cost GPS and map data[C]/'IEEE. Proceedings of the 13th International IEEE Annual Conference on Intelligent Transportation Systems. Funchah IEEE, 2010: 1657-1662. [7] LI Kang, TAN H S, HEDRICK J K. Map-aided GPS/INS localization using a low-order constrained unscented Kalman filter[C]//IEEE. Proceedings of the 48th IEEE Conference on Decision and Control Held Jointly with 2009 28th Chinese Control Conference. Shanghai: IEEE, 2009: 4607-4612. [8] TOLEDO-MOREO R, BET AILLE D, PEYRET F. Lanelevel integrity provision for navigation and map matching with GNSS, dead reckoning, and enhanced maps[J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(1): 100-112. doi: 10.1109/TITS.2009.2031625 [9] EFATMANESHNIK M, ALAM N, KEALY A, et al. Evaluation of a cooperative positioning algorithm by tight GPS/DSRC integration for vehicular networks[C]//IGNSS Society. Proceedings of International Global Navigation Satellite Systems Symposium. Tweed Heads: IGNSS Society, 2011: 1-14. [10] ALAM N, BALAEI A T, DEMPSTER A G. An instantaneous lane-level positioning using DSRC carrier frequency offset[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(4): 1566-1575. doi: 10.1109/TITS.2012.2195177 [11] ALAM N. Three dimensional positioning with two GNSS satellites and DSRC for vehicles in urban canyons[C]/^Institute of Navigation. Proceedings of the 24th International Technical Meeting of the Satellite Division of the Institute of Navigation. Portland: Institute of Navigation, 2011: 3975-3983. [12] ALAM N, BALAEI A T, DEMPSTER A G. A DSRC dopplerbased cooperative positioning enhancement for vehicular networks with GPS availability[J]. IEEE Transactions on Vehicular Technology, 2011, 60(9): 4462-4470. doi: 10.1109/TVT.2011.2168249 [13] REZAEI S, SENGUPTA R, KRISHNAN H, et al. Tracking the position of neighboring vehicles using wireless communications[J]. Transportation Research Part C: Emerging Technologies, 2010, 18(3): 335-350. doi: 10.1016/j.trc.2009.05.010 [14] EFATMANESHNIK M, BALAEI A T, ALAM N, et al. A modified multidimensional scaling with embedded particle filter algorithm for cooperative positioning of vehicular networks[C]//IEEE. Proceedings of 2009 IEEE International Conference on Vehicular Electronics and Safety. Pune: IEEE, 2009: 7-12. [15] LI Jian, LU Wen-hua. Full truckload vehicle routing problem with profits[J]. Journal of Traffic and Transportation Engineering: English Edition, 2014, 1(2): 146-152. doi: 10.1016/S2095-7564(15)30099-4 [16] EFATMANESHNIK M, KEALY A, BALAEI A T, et al. Information fusion for localization within vehicular networks[J]. The Journal of Navigation, 2011, 64(3): 401-416. doi: 10.1017/S0373463311000075 [17] ANSARI K, WANG C, WANG L, et al. Vehicle-to-vehicle real-time relative positioning using 5.9 GHz DSRC media[C]//IEEE. Proceedings of 2013 IEEE 78th Vehicular Technology Conference. Las Vegas: IEEE, 2013: 1-7. [18] WILLIAMS T, ALVES P, LACHAPELLE G, et al. Evaluation of GPS-based methods of relative positioning for automotive safety applications[J]. Transportation Research Part C: Emerging Technologies, 2012, 23(1): 98-108. [19] 来磊, 曲仕茹. 交通无线传感网络运动车辆定位方法[J]. 交通运输工程学报, 2013, 13(1): 114-120. doi: 10.3969/j.issn.1671-1637.2013.01.017LAI Lei, QU Shi-ru. Moving vehicle location method based on traffic wireless sensor network[J]. Journal of Traffic and Transportation Engineering, 2013, 13(1): 114-120. (in Chinese). doi: 10.3969/j.issn.1671-1637.2013.01.017 [20] PEKER A U, ACARMAN T, YAMAN C, et al. Vehicle localization enhancement with VANETs[C]//IEEE. Proceedings of 2014 IEEE Intelligent Vehicles Symposium. Lansing: IEEE, 2014: 661-666. [21] NAJJAR M, BONNIFAIT P. A road-matching method for precise vehicle localization using belief theory and Kalman filtering[J]. Autonomous Robots, 2005, 19(2): 173-191. doi: 10.1007/s10514-005-0609-1 [22] PESONEN H, PICHE R. Cubature-based Kalman filters for positioning[J]/'IEEE. Proceedings of the 7th Workshop on Positioning Navigation and Communication. Piscataway: IEEE, 2010: 45-49. [23] ALAM N, BABAEI A, DEMPSTER A. A filtering method for improving the precision of cooperative positioning in VANETs[C]//IGNSS Society. Proceedings of International Global Navigation Satellite Systems Symposium. Tweed Heads: IGNSS Society, 2011: 45-55. [24] NDIENG A N, GRUYER D, GLASER S, et al. Low cost IMU-odometer-GPS ego localization for unusual maneuvers[J]. Information Fusion, 2011, 12(4): 264-274. doi: 10.1016/j.inffus.2010.06.006 [25] ARASARATNAM I, HAYKIN S. Cubature Kalman filters[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1254-1269. doi: 10.1109/TAC.2009.2019800 [26] CARLSON N A. Federated square root filter for decentralized parallel processes[J]. IEEE Transactions on Aerospace and Electronic Systems, 1990, 26(3): 517-525. doi: 10.1109/7.106130 -

 下载:
下载:







计量
- 文章访问数: 1335
- HTML全文浏览量: 350
- PDF下载量: 844
- 被引次数: 0
