

Receding horizon optimization of en route flight conflict resolution strategy
-
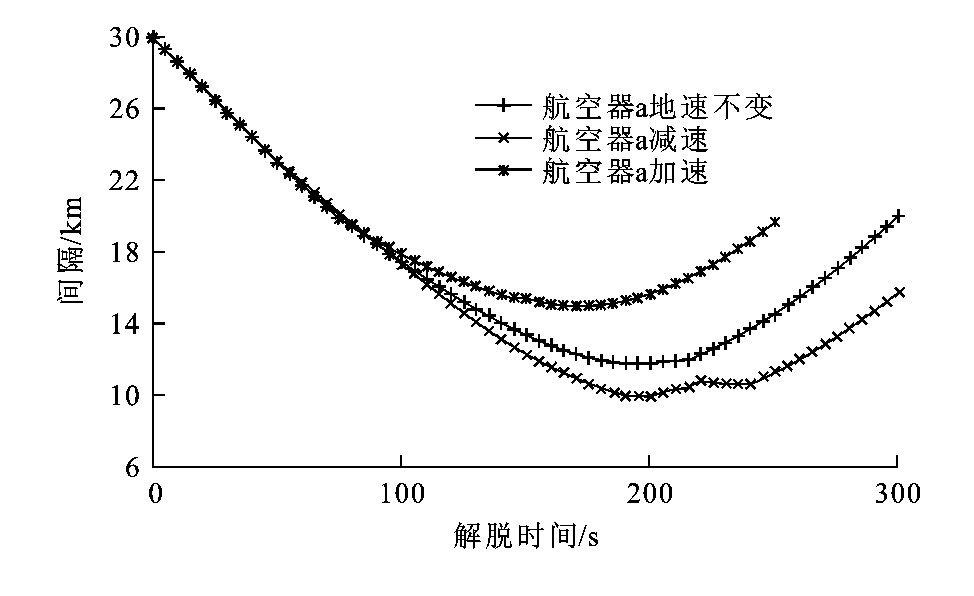
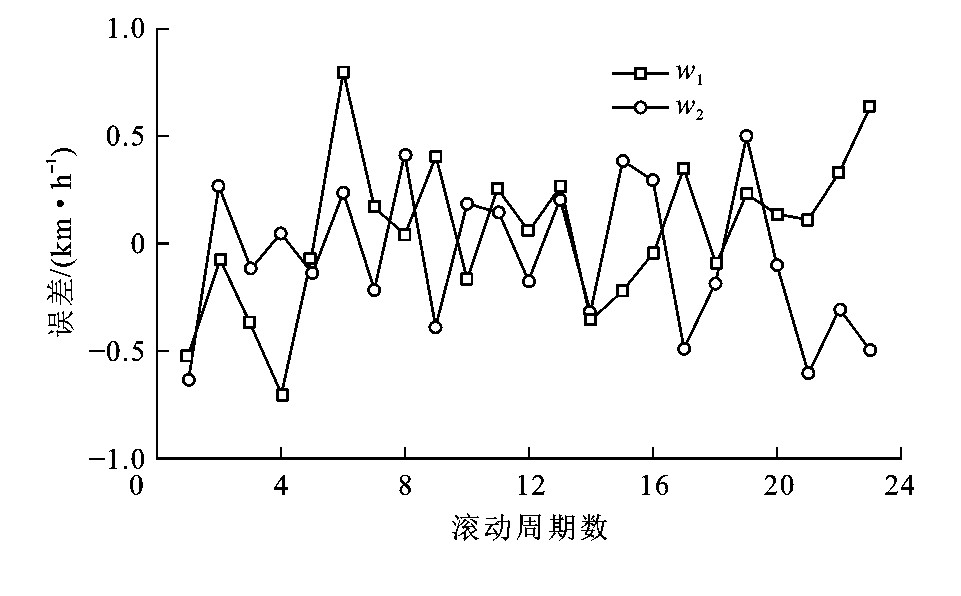
摘要: 针对固定航路上2架航空器的冲突解脱问题, 在基于航向角和地速调整的静态单一最优解脱策略的基础上, 考虑航空器飞行过程中可能存在的速度扰动等不确定因素, 给出了一种基于滚动时域优化的动态混合最优解脱策略, 采用极大似然估计和牛顿-拉夫逊迭代算法对风矢量进行辨识, 对无扰动下的静态优化、航空器地速变化条件下的滚动时域优化以及风矢量变化条件下的滚动时域优化3种策略进行对比。分析结果表明: 调整航向角的最短解脱时间为195s, 调整地速的最短解脱时间为285s;第1架航空器减速、匀速、加速时, 解脱时间分别为240、215、150s;风矢量横向、纵向分量估计值的平均绝对误差分别为0.049、-0.067km·h-1, 相对误差分别为0.173%、-0.205%;对风矢量进行辨识后解脱时间从215s减少为160s。可见, 基于风矢量辨识与滚动时域优化的动态混合最优解脱策略能够及时应对风矢量、航空器地速突然变化的情况, 具有较好的动态适应性。
-
关键词:
- 空中交通管理 /
- 下一代空管自动化系统 /
- 冲突解脱 /
- 滚动时域控制 /
- 参数辨识
Abstract: Aiming at conflict resolution problem of two aircrafts on fixed airway, the static single optimal resolution strategy based on adjusting course angle and ground speed was analyzed, the uncertain factors such as speed disturbance possibly existing in aircraft flying process were considered, and a dynamic mixed optimal resolution strategy based on receding horizon optimization was proposed.The maximum likelihood estimation and Newton-Raphson iteration algorithm were used to identify wind vector.Three strategies including static optimization without disturbance, receding horizon optimization with changing ground speed of aircraft and receding horizon optimization with changing wind vector were compared.Analysis result shows that the shortest resolution time by adjusting course angle is 195 s, and the shortest resolution time by adjusting ground speed is 285 s.When the first aircraft decelerates, keeps uniform speed and accelerates, the resolution times are 240, 215 and 150 srespectively.The mean absolute errors of estimated values for wind vector's transversal and longitudinal components are 0.049 and-0.067 km ·h-1 respectively, and the relative errors are 0.173% and-0.205% respectively.The resolution time decreases from 215 sto 160 safter wind vector is identificated.The dynamic mixed optimal resolution strategy based on wind vector identification and receding horizon optimization can timely response to the suddenly changing situation of wind vector and the ground speed of aircraft, and has good dynamic adaptability.15 figs, 27 refs. -

图 2 航空器 b 通过调整航向角解脱冲突的航迹
Figure 2. Flight path of aircraft b by adjusting course angle to resolve conflict

图 3 航空器 b 通过调整地速解脱冲突的航迹
Figure 3. Flight path of aircraft b by adjusting ground speed to resolve conflict

图 4 航空器 b 通过滚动时域优化解脱冲突的航迹
Figure 4. Flight path of aircraft b by using receding horizon optimization

图 6 两架航空器在惯性坐标系内的初始位置关系
Figure 6. Initial position relation of two aircrafts in inertial coordinate system

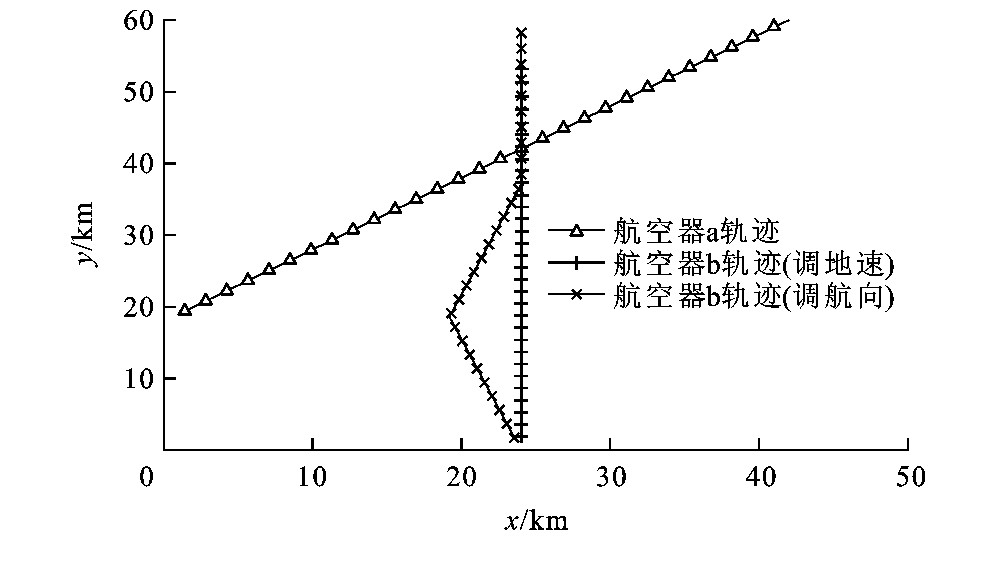
图 7 解脱过程中2架航空器的轨迹曲线
Figure 7. Trajectory curves of two aircrafts in resolution process

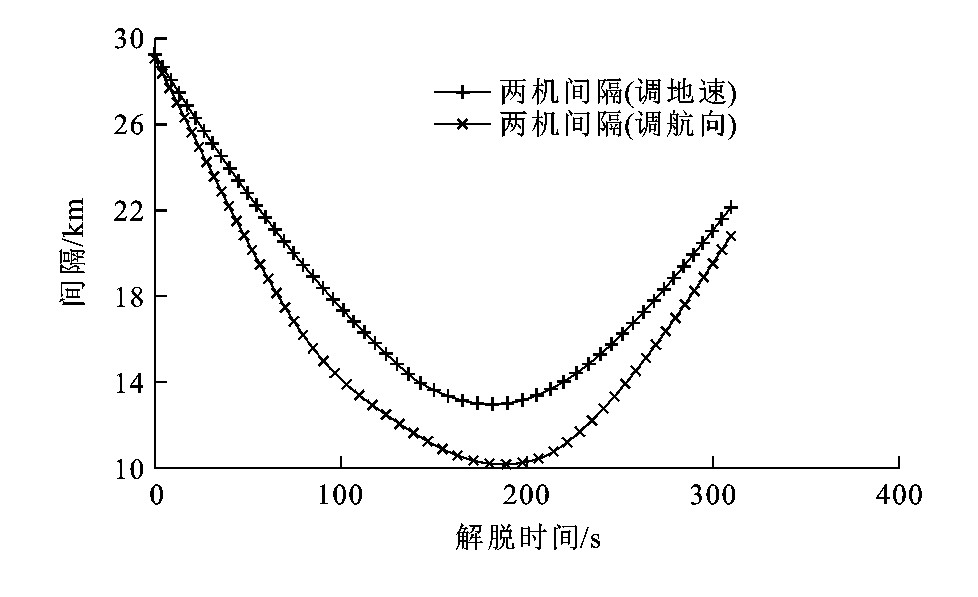
图 8 静态单一解脱策略下2架航空器之间间隔的变化曲线
Figure 8. Variation curves of interval between two aircrafts under static single resolution strategy

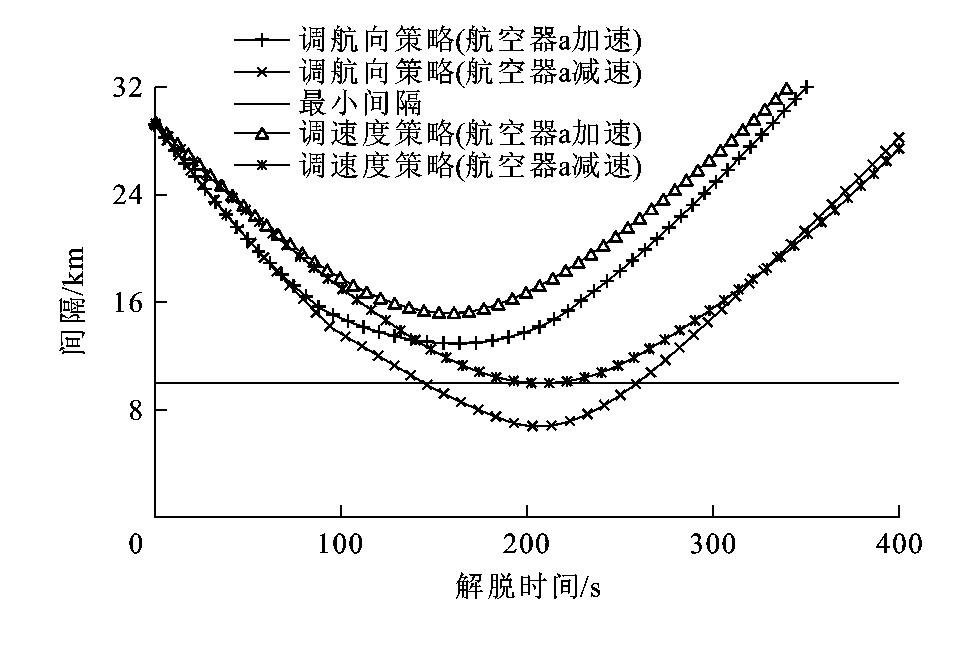
图 9 航空器 a 地速变化时静态解脱策略下2架航空器之间间隔的变化曲线
Figure 9. Variation curves of interval between two aircrafts under static resolution strategy with changing ground speed of aircraft a

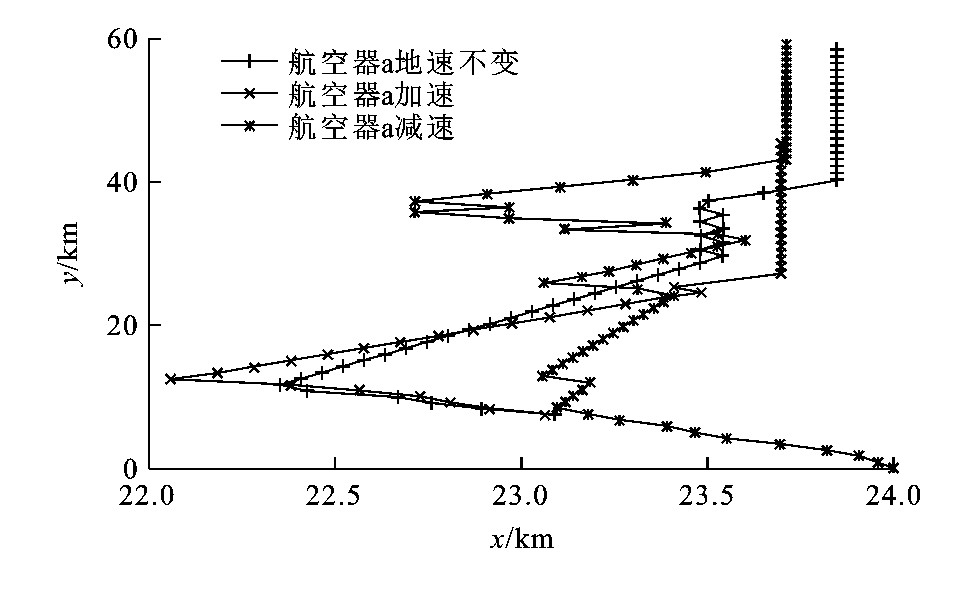
图 10 解脱过程中航空器 b 的轨迹曲线
Figure 10. Trajectory curves of aircraft b in resolution process

图 11 滚动时域优化策略下2架航空器之间间隔的变化曲线
Figure 11. Variation curves of interval between two aircrafts under receding horizon optimization strategy

图 13 随机风场风分量与实际风场风分量的差值
Figure 13. Differences between wind components of random wind field and actual wind field

图 14 风矢量辨识前后航空器 b 的轨迹曲线
Figure 14. Trajectory curves of aircraft b before and after wind vector identification
-
[1] ERZBERGER H. Automated conflict resolution for air traffic control[C]//ICAS. 25th International Congress of the Aeronautical Sciences. Bonn: ICAS, 2006: 1-27. [2] PAPPAS G J, TOMLIN C, SASTRY S. Conflict resolution for multi-agent hybrid systems[C]//IEEE. Proceedings of the35th IEEE Conference on Decision and Control. New York: IEEE, 1996: 1184-1189. [3] TOMLIN C, PAPPAS G J, SASTRY S. Conflict resolution for air traffic management: a study in multiagent hybrid systems[J]. IEEE Transactions on Automatic Control, 1998, 43(4): 509-521. doi: 10.1109/9.664154 [4] MENON P K, SWERIDUK G D, SRIDHAR B. Optimal strategies for free-flight air traffic conflict resolution[J]. Journal of Guidance, Control, and Dynamics, 1999, 22(2): 202-211. doi: 10.2514/2.4384 [5] 靳学梅, 韩松臣, 孙樊荣. 自由飞行中冲突解脱的线性规划法[J]. 交通运输工程学报, 2003, 3(2): 75-79. doi: 10.3321/j.issn:1671-1637.2003.02.017JIN Xue-mei, HAN Song-chen, SUN Fan-rong. Conflict resolution in free flight with linear programming[J]. Journal of Traffic and Transportation Engineering, 2003, 3(2): 75-79. (in Chinese). doi: 10.3321/j.issn:1671-1637.2003.02.017 [6] 程丽媛, 韩松臣, 刘星. 采用内点约束的最优冲突解脱方法[J]. 交通运输工程学报, 2005, 5(2): 80-84. doi: 10.3321/j.issn:1671-1637.2005.02.020CHENG Li-yuan, HAN Song-chen, LIU Xing. Optimal conflict resolution method based on inner-point restriction[J]. Journal of Traffic and Transportation Engineering, 2005, 5(2): 80-84. (in Chinese). doi: 10.3321/j.issn:1671-1637.2005.02.020 [7] VALENZUELA A, RIVAS D. Conflict resolution in converging air traffic using trajectory patterns[J]. Journal of Guidance, Control, and Dynamics, 2011, 34(4): 1172-1189. doi: 10.2514/1.50751 [8] 韩云祥, 汤新民, 韩松臣. 固定航路最优飞行冲突解脱模型[J]. 交通运输工程学报, 2012, 12(1): 115-120. doi: 10.3969/j.issn.1671-1637.2012.01.018HAN Yun-xiang, TANG Xin-min, HAN Song-chen. Conflict resolution model of optimal flight for fixation airway[J]. Journal of Traffic and Transportation Engineering, 2012, 12(1): 115-120. (in Chinese). doi: 10.3969/j.issn.1671-1637.2012.01.018 [9] HU Jiang-hai, LYGEROS J, PRANDINI M, et al. Aircraft conflict prediction and resolution using Brownian motion[C]//IEEE. Proceedings of the 38th IEEE Conference on Decision and Control. New York: IEEE, 1999: 2438-2443. [10] GESER A, MUOZ C. A geometric approach to strategic conflict detection and resolution[C]//IEEE. Proceedings of the 21st Digital Avionics Systems Conference(DASC 2002). New York: IEEE, 2002: 1-11. [11] CLEMENTS J C. The optimal control of collision avoidance trajectories in air traffic management[J]. Transportation Research Part B: Methodological, 1999, 33(4): 265-280. doi: 10.1016/S0191-2615(98)00031-9 [12] 何晓菊, 廖志武. 基于动态调速的定航线飞行冲突探测与解脱[J]. 计算机应用, 2010, 30(2): 540-542, 559. https://www.cnki.com.cn/Article/CJFDTOTAL-JSJY201002073.htmHE Xiao-ju, LIAO Zhi-wu. Airline flying conflict survey and extrication based on dynamic velocity modulation[J]. Journal of Computer Applications, 2010, 30(2): 540-542, 559. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JSJY201002073.htm [13] PALLOTTINO L, FERON E M, BICCHI A. Conflict resolution problems for air traffic management systems solved with mixed integer programming[J]. IEEE Transactions on Intelligent Transportation Systems, 2002, 3(1): 3-11. doi: 10.1109/6979.994791 [14] ALONSO-AYUSO A, ESCUDERO L F, MARTÍN-CAMPO F J. A mixed 0-1nonlinear approach for the collision avoidance in ATM: velocity changes through a time horizon[J]. Computer and Operations Research, 2012, 39(12): 3136-3146. doi: 10.1016/j.cor.2012.03.015 [15] TOMLIN C, PAPPAS G, LYGEROS J, et al. Hybrid control models of next generation air traffic management[J]. Lecture Notes in Computer Science, 1997, 1273: 378-404. [16] SASTRY S, MEYER G, TOMLIN C, et al. Hybrid control in air traffic management systems[C]//IEEE. Proceedings of the 34th IEEE Conference on Decision and Control. New York: IEEE, 1995: 1478-1483. [17] BILIMORIA K D, SRIDHAR B, CHATTERJI G B. Effects of conflict resolution maneuvers and traffic density of free flight[C]//AIAA. 1996 AIAA Guidance, Navigation and Control Conference. Reston: AIAA, 1996: 1-11. [18] VELA A E, SOLAK S, CLARKE J B, et al. Near real-time fuel-optimal en route conflict resolution[J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(4): 826-837. doi: 10.1109/TITS.2010.2051028 [19] BOUSSON K. Model predictive control approach to global air collision avoidance[J]. Aircraft Engineering and Aerospace Technology: An International Journal, 2008, 80(6): 605-612. [20] ROUSSOS G P, CHALOULOS G, KYRIAKOPOULOS K J, et al. Control of multiple non-holonomic air vehicles under wind uncertainty using model predictive control and decentralized navigation functions[C]//IEEE. Proceedings of the 47th IEEE Conference on Decision and Control. New York: IEEE, 2008: 1225-1230. [21] CHALOULOS G, HOAYEM P, LYGEROS J. Distributed hierarchical MPC for conflict resolution in air traffic control[C]//AACC. 2010America Control Conference. Baltimore: AACC, 2010: 3945-3950. [22] MONDOLONI S. A multiple-scale model of wind-prediction uncertainty and application to trajectory prediction[C]//AIAA. 6th AIAA Aviation Technology, Integration and Operations Conference(ATIO). Reston: AIAA, 2006: 1-14. [23] CHALOULOS G, LYGEROS J. Effect of wind correlation on aircraft conflict probability[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(6): 1742-1752. [24] DELAHAYE D, PUECHMOREL S. Aircraft local wind estimation from radar tracker data[C]//IEEE. ICARCV 2008 10th International Conference on Control, Automation, Robotics and Vision. New York: IEEE, 2008: 1033-1038. [25] 徐琴, 汤新民, 韩松臣, 等. 基于参数辨识的短期4D航迹预测[J]. 信息与控制, 2014, 43(4): 501-505. https://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201404021.htmXU Qin, TANG Xin-min, HAN Song-chen, et al. Shortterm 4D trajectory prediction based on parameter identification[J]. Information and Control, 2014, 43(4): 501-505. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201404021.htm [26] LYMPEROPOULOS I, LYGEROS J. Sequential Monte Carlo method for multi-aircraft trajectory prediction in air traffic management[J]. International Journal of Adaptive Control and Signal Processing, 2010, 24(10): 830-849. [27] COLE R E, RICHARD C, KIM S, et al. An assessment of the60km rapid update cycle(RUC)with near real-time aircraft reports[R]. Cambridge: Lincoln Laboratory, Massachusetts Institute of Technology, 1998. -

 下载:
下载:




计量
- 文章访问数: 3683
- HTML全文浏览量: 547
- PDF下载量: 1801
- 被引次数: 0
