

Integrated simulation platform of braking system of rolling stock based on multi-discipline collaborative analysis
Article Text (Baidu Translation)
-
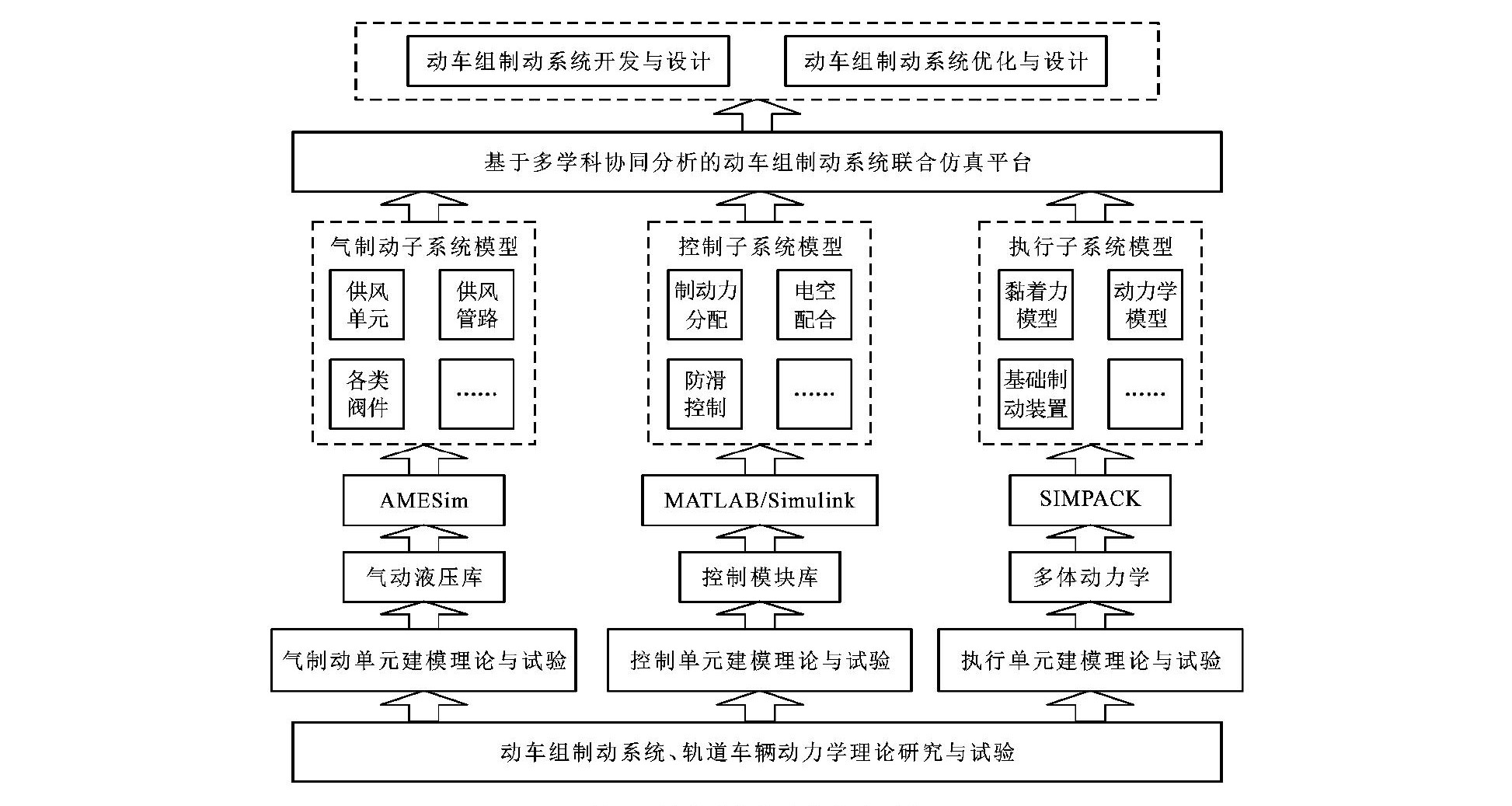
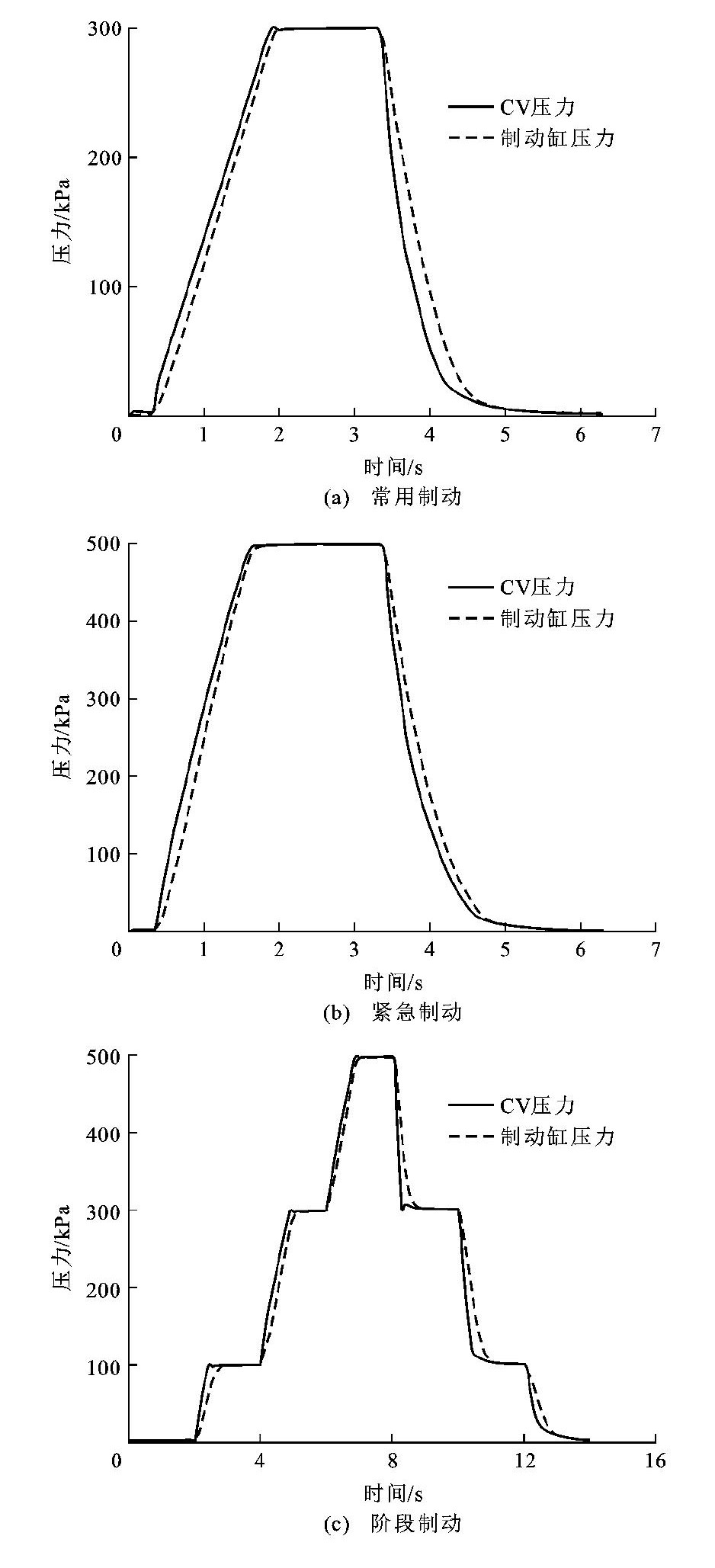
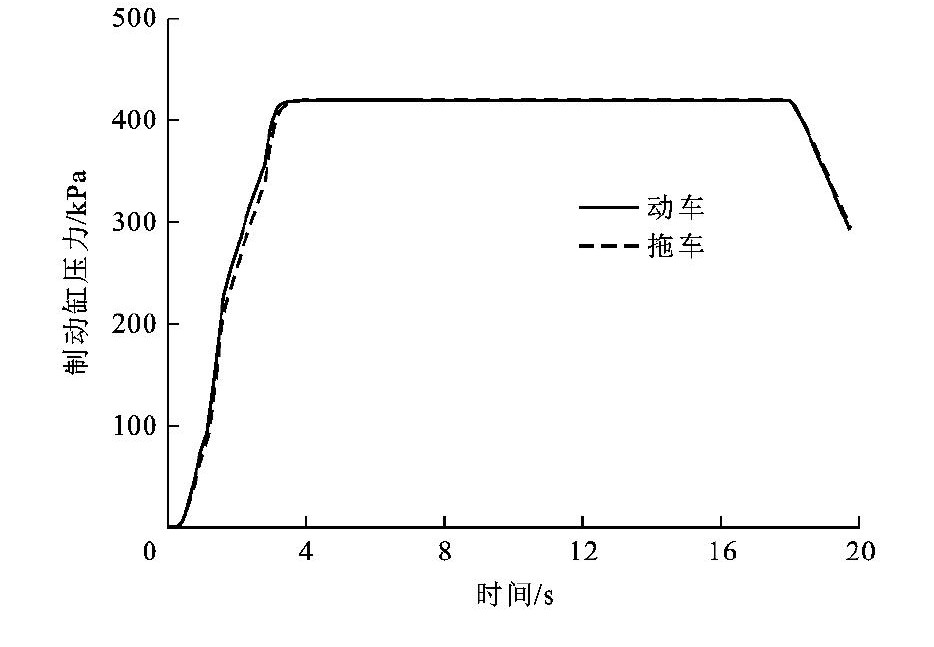
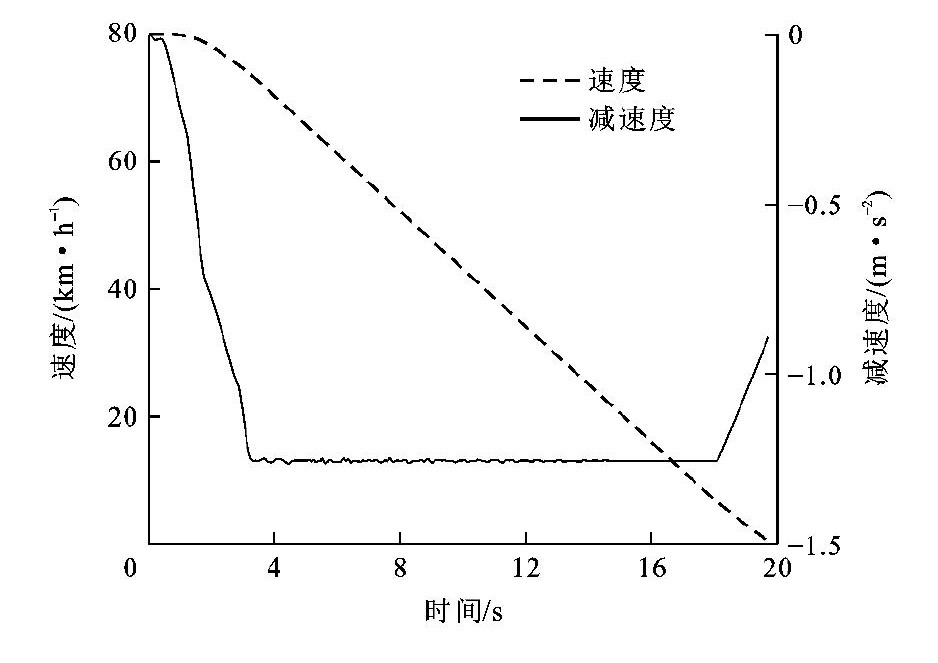
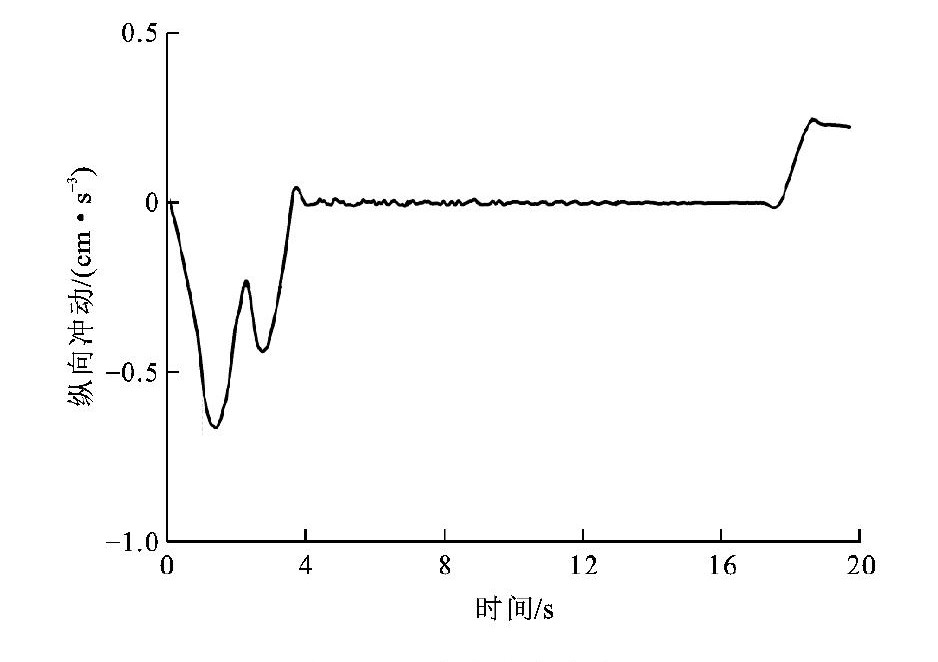
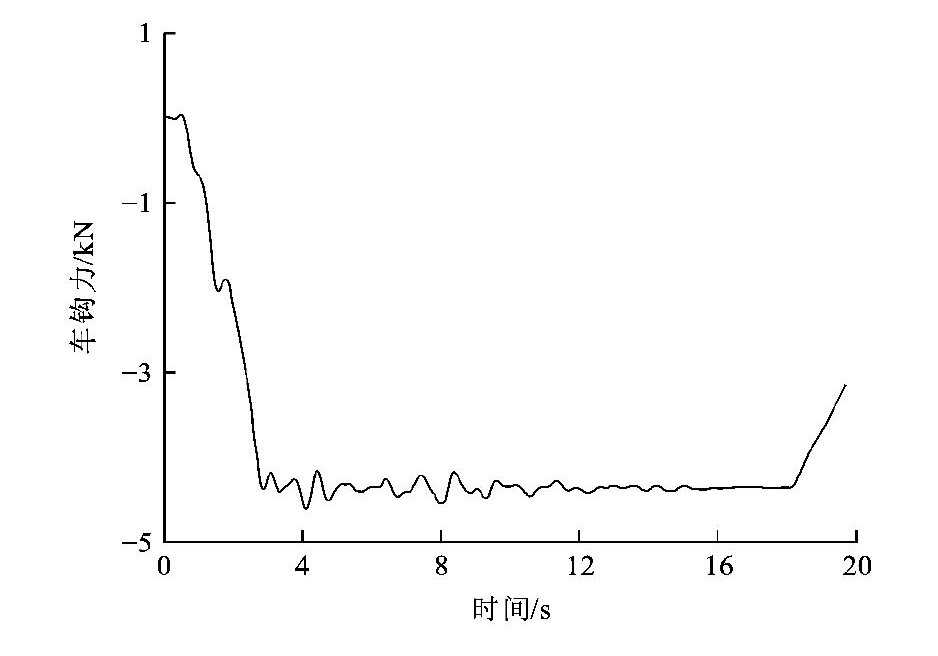
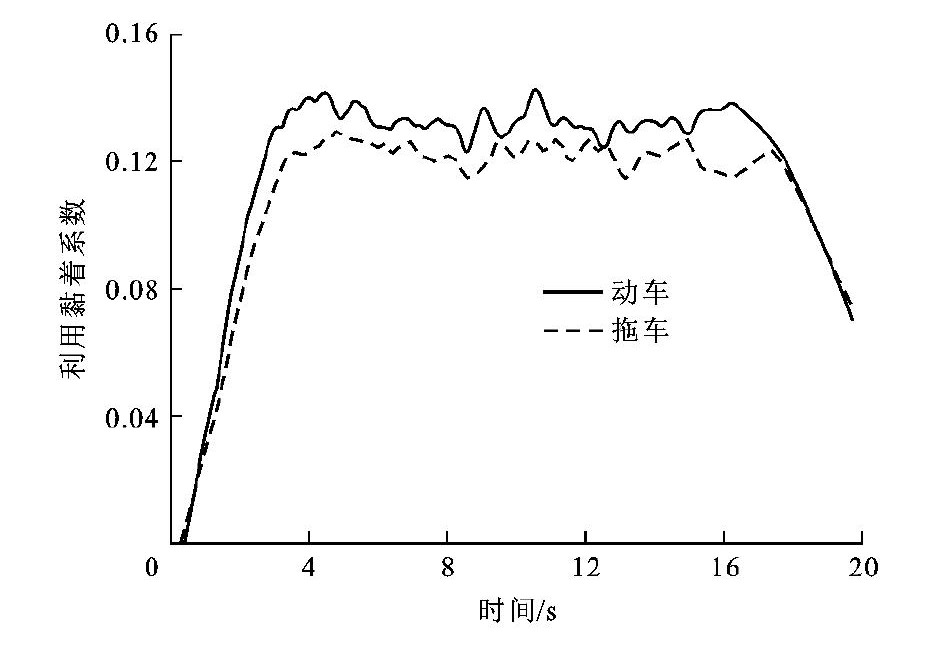
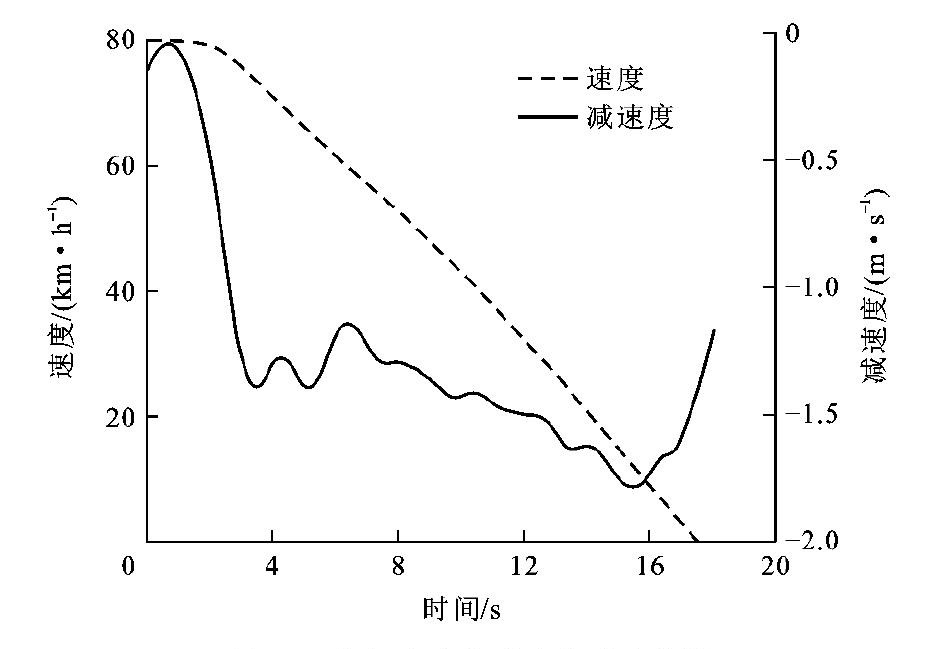
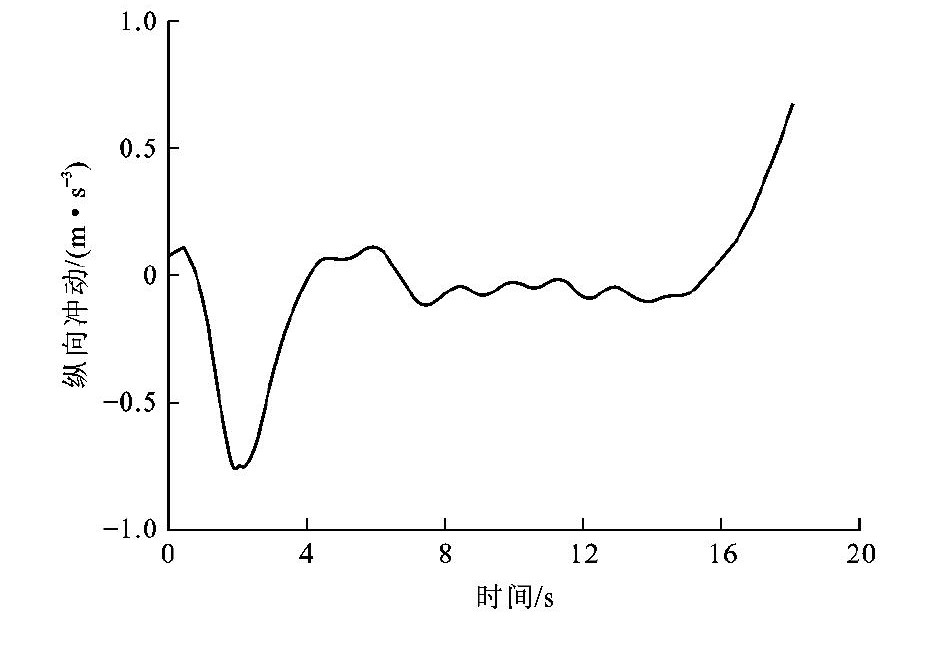
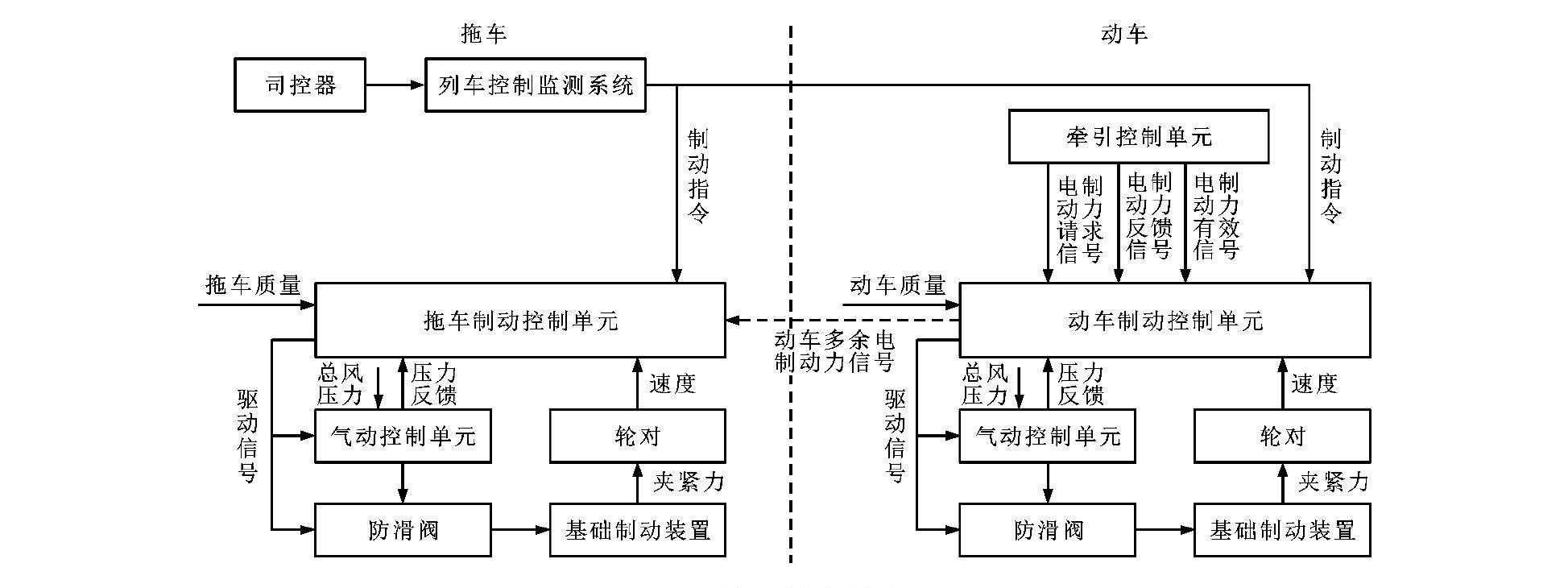
摘要: 根据轨道车辆电空复合制动的工作原理, 以全车制动系统为研究对象, 一动一拖制动控制单元为研究载体, 基于多学科协同分析方法, 建立了控制子系统、气制动子系统、电制动子系统与制动执行子系统模型, 基于各子系统之间的关联参数, 搭建了制动系统的联合仿真平台; 根据广佛二期车辆的实际参数, 模拟列车电制动失效工况下常用全制动的运行工况, 计算了空走时间、制动时间、制动距离、制动减速度、瞬时速度、平均减速度、纵向冲动、车钩力、利用黏着系数与制动缸压力, 并与试验结果进行了对比, 以验证集成化仿真平台的可行性和有效性。仿真和试验结果表明: 在制动稳定后, 仿真和试验的列车制动减速度约为1.25m·s-2, 仿真的平均减速度约为1.05m·s-2, 试验的平均减速度约为1.09m·s-2, 误差较小, 且均符合常用全制动的平均减速度不小于1.0m·s-2的要求; 在常用全制动工况下, 采取等磨耗制动力分配的动、拖车利用黏着系数不同, 动车约为0.13, 拖车约为0.12, 但都未超过0.16的最大可利用黏着系数的限制; 虽然动、拖车的质量不同, 但等磨耗工况下施加常用全纯空气制动后, 试验和仿真的动、拖车的制动缸压力均相等, 约为420kPa。由此可见, 可利用基于多学科协同分析的联合仿真平台对轨道车辆制动系统进行车辆级的研究, 为制动系统的开发和设计优化提供理论依据。Abstract: On the basis of the working principle of electro-pneumatic brake, the braking system of rolling stock was taken as research object, one motor car and one trailer were taken as a control unit, and the control subsystem model, air brake subsystem model, electric braking subsystem model and braking executing subsystem model were built based on multi-discipline collaborative analysis. By the correlation parameters of the subsystems, a co-simulation platform was established. The operating condition of full service braking was simulated under the failure of electric braking according to the actual parameters of second phase of Guangfo Metro, and the idling braking time, braking time, braking distance, braking deceleration, instantaneous speed, mean deceleration, longitudinal jerk, coupler force, adhesion utilization and braking cylinderpressure were calculated. The simulation and test results were compared to verify the feasibility and validity of the platform. Simulation and test results show that the braking decelerations of train in simulation and test are about 1.25 m·s-2 after braking process is steady, the mean braking deceleration in simulation is about 1.05 m·s-2, the decelerate in test is about 1.09 m·s-2, all of them meet the requirement that the mean braking deceleration of full service braking is more than 1.0 m·s-2, and the simulation error is lesser. In full service braking, the adhesion utilizations are different under the equivalent wear braking force distribution strategy, it is 0.13 for motor car and 0.12 for tailor, but both of them are less than the adhesion limited 0.16. Although the qualities of motor car and trailer car are different, the pressures of braking cylinders in full service braking are same under the equivalent wear strategy, and the value is about 420 kPa. In summary, the multi-discipline collaborative analysis and co-simulation platform are effective in modelling and analyzing the braking system of rolling stock, and are theoretical basis to research and develop braking system.
-
Key words:
- rolling stock /
- braking system /
- multi-discipline analysis /
- integrated simulation /
- braking performance
-
[1] MURTAZA M A, GARG S B L. Brake modelling in train simulation studies[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 1989, 203 (1): 87-95. [2] MURTAZA M A, GARG S B L. Transients during a railway air brake release demand[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 1990, 204 (1): 31-38. doi: 10.1243/PIME_PROC_1990_204_183_02 [3] MURTAZA M A. Railway air brake simulation: an empirical approach[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 1993, 207 (1): 51-56. doi: 10.1243/PIME_PROC_1993_207_226_02 [4] PUGI L, MALVEZZI M, ALLOTTA B, et al. A parametric library for the simulation of a Union International des Chemins de Fer (UIC) pneumatic braking system[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 2004, 218 (2): 117-132. doi: 10.1243/0954409041319632 [5] PUGI L, PALAZZOLO A, FIORAVANTI D. Simulation of railway brake plants: an application to SAADKMS freight wagons[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 2008, 222 (4): 321-329. doi: 10.1243/09544097JRRT118 [6] CANTONE L, CRESCENTINI E, VERZICCO R, et al. A numerical model for the analysis of unsteady train braking and releasing maneuvres[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 2009, 223 (3): 305-317. doi: 10.1243/09544097JRRT240 [7] PIECHOWIAK T. Pneumatic train brake simulation method[J]. Vehicle System Dynamics, 2009, 47 (12): 1473-1492. doi: 10.1080/00423110802600946 [8] PIECHOWIAK T. Verification of pneumatic railway brake model[J]. Vehicle System Dynamics, 2010, 48 (3): 283-299. doi: 10.1080/00423110902780622 [9] 魏伟, 张开文. 列车空气制动系统的数学模型[J]. 西南交通大学学报, 1994, 29 (3): 286-291. https://www.cnki.com.cn/Article/CJFDTOTAL-XNJT403.009.htmWEI Wei, ZHANG Kai-wen. A mathematical model of air brake system of trains[J]. Journal of Southwest Jiaotong University, 1994, 29 (3): 286-291. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XNJT403.009.htm [10] 魏伟, 赵旭宝, 姜岩, 等. 列车空气制动与纵向动力学集成仿真[J]. 铁道学报, 2012, 34 (4): 39-46. doi: 10.3969/j.issn.1001-8360.2012.04.007WEI Wei, ZHAO Xu-bao, JIANG Yan, et al. The integrated model of train air brake and longitudinal dynamics[J]. Journal of the China Railway Society, 2012, 34 (4): 39-46. (in Chinese). doi: 10.3969/j.issn.1001-8360.2012.04.007 [11] 陈哲明, 曾京, 罗仁. 列车空气制动防滑控制及其仿真[J]. 铁道学报, 2009, 31 (4): 25-31. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB200904007.htmCHEN Zhe-ming, ZENG Jing, LUO Ren. Wheel-slip prevention control and simulation under train pneumatic braking[J]. Journal of the China Railway Society, 2009, 31 (4): 25-31. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB200904007.htm [12] 罗仁, 曾京. 铁道车辆防滑控制仿真[J]. 机械工程学报, 2008, 44 (3): 29-34. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200803007.htmLUO Ren, ZENG Jing. Anti-sliding control simulation of railway vehicle braking[J]. Chinese Journal of Mechanical Engineering, 2008, 44 (3): 29-34. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200803007.htm [13] 陆强, 杨美传. 基于AMESim的地铁车辆空气制动系统的建模及仿真[J]. 液压气动与密封, 2011 (10): 45-48. https://www.cnki.com.cn/Article/CJFDTOTAL-YYQD201110017.htmLU Qiang, YANG Mei-chuan. Modeling and simulation methodology of pneumatic braking system in motro vehicles using AMESim[J]. Hydraulics Pneumatics and Seals, 2011 (10): 45-48. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YYQD201110017.htm [14] 左建勇, 任利惠, 吴萌岭. 铁道车辆制动系统防滑控制仿真与试验研究[J]. 同济大学学报: 自然科学版, 2010, 38 (6): 912-916. doi: 10.3969/j.issn.0253-374x.2010.06.023ZUO Jian-yong, REN Li-hui, WU Meng-ling. Simulation and experimental research on anti-sliding control of railway vehicle braking[J]. Journal of Tongji University: Natural Science, 2010, 38 (6): 912-916. (in Chinese). doi: 10.3969/j.issn.0253-374x.2010.06.023 [15] 左建勇, 王宗明, 吴萌岭. 地铁列车空气制动系统仿真模型[J]. 交通运输工程学报, 2013, 13 (2): 42-47. http://transport.chd.edu.cn/article/id/201302006ZUO Jian-yong, WANG Zong-ming, WU Meng-ling. Simulation model of air Braking system for subway train[J]. Journal of Traffic andTransportation Engineering, 2013, 13 (2): 42-47. (in Chinese). http://transport.chd.edu.cn/article/id/201302006 [16] 朱德泉. 基于联合仿真的机电液一体化系统优化设计方法研究[D]. 合肥: 中国科学技术大学, 2012.ZHU De-quan. Study on optimization design method for mechanical-electrical-hydraulic integrated system based on collaborative simulation[D]. Hefei: University of Science and Technology of China, 2012. (in Chinese). [17] 刘建, 杨美传, 夏海龙. 基于AMESim的开关型EP阀仿真研究[J]. 铁道车辆, 2014, 52 (4): 12-14. https://www.cnki.com.cn/Article/CJFDTOTAL-TDCL201404004.htmLIU Jian, YANG Mei-chuan, XIA Hai-long. Simulation research on the on-off EP valves based on AMESim[J]. Rolling Stock, 2014, 52 (4): 12-14. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-TDCL201404004.htm [18] 许志泉. 基于AMESim动车组空气制动系统仿真与研究[D]. 成都: 西南交通大学, 2013.XU Zhi-quan. Simulation and study on air brake system of EMU based on AMESim[D]. Chengdu: Southwest Jiaotong University, 2013. (in Chinese). [19] 缪炳荣, 肖守讷, 金鼎昌. 应用SIMPACK对复杂机车多体系统建模与分析方法的研究[J]. 机械科学与技术, 2006, 25 (7): 813-816. https://www.cnki.com.cn/Article/CJFDTOTAL-JXKX200607015.htmMIAO Bing-rong, XIAO Shou-ne, JIN Ding-chang. Research on modeling and analysis of a complex multibody system by using SIMPACK[J]. Mechanical Science and Technology, 2006, 25 (7): 813-816. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXKX200607015.htm [20] 陈龙, 方宇, 潘以成, 等. 基于SIMPACK的城市轨道车辆脱轨安全性分析[J]. 城市轨道交通研究, 2013, 16 (8): 126-129, 133. https://www.cnki.com.cn/Article/CJFDTOTAL-GDJT201308029.htmCHEN Long, FANG Yu, PAN Yi-cheng, et al. Safety analysis of urban rail vehicle derailment based on SIMPACK[J]. Urban mass Transit, 2013, 16 (8): 126-129, 133. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GDJT201308029.htm [21] 黄安宁. 基于SIMPACK的某型轨道车辆动态性能仿真研究[D]. 昆明: 昆明理工大学, 2012.HUANG An-ning. Simulation research on dynamic performances of a certain type of railway vehicles based on SIMPACK[D]. Kunming: Kunming University of Science and Technology, 2012. (in Chinese). [22] POLACH O. Creep forces in simulations of traction vehicles running on adhesion limit[J]. Wear, 2005, 258 (7/8): 992-1000. [23] POLACH O. Fast wheel-rail forces calculation computer code[J]. Vehicle System Dynamics, 2000, 33 (S): 728-739. [24] MELI E, RIDOLFI A, RINDI A. An innovative degraded adhesion model for railway vehicles: development and experimental validation[J]. Meccanica, 2014, 49 (4): 919-937. [25] 许桂红. 地铁制动系统的研究与仿真[D]. 成都: 西南交通大学, 2014.XU Gui-hong. Research and simulation of metro braking system[D]. Chengdu: Southwest Jiaotong University, 2014. (in Chinese). -

 下载:
下载:






图(23) / 表(2)
计量
- 文章访问数: 1392
- HTML全文浏览量: 589
- PDF下载量: 629
- 被引次数: 0
