

Mathematical model of ship motion in regular wave based on three-dimensional time-domain Green function method
-
摘要: 在小时间区域采用级数展开法, 在大时间区域采用渐进展开法, 在大、小时间过渡区域采用精细积分法, 对三维时域Green函数进行数值计算; 采用线性叠加原理求解船舶辐射与绕射问题, 构造出船舶在规则波浪中的运动数学模型, 并采用数值方法计算WigleyⅠ型船舶和S60型船舶以Froude数为0.2迎波浪航行时的水动力系数、波浪激励力与运动时间历程。计算结果表明: 由于不规则频率的影响, 当量纲一频率为1.7时, WigleyⅠ型船舶的垂荡附加质量计算结果比试验结果小44%, 当量纲一频率为2.5时, S60型船舶的纵摇阻尼系数计算结果比试验结果小43%;随着入射波频率的增加, WigleyⅠ型船舶和S60型船舶的水动力系数和波浪激励力的大部分计算结果与试验结果的相对误差小于30%, 且二者的变化趋势一致; 对于WigleyⅠ型船舶, 当波长与船长比为1.25时, 采用三维时域方法计算的垂荡幅值响应因子和纵摇幅值响应因子分别比试验值小11.3%和4.8%, 采用三维频域方法计算的垂荡幅值响应因子比试验值大48.4%, 纵摇幅值响应因子比试验值小48.4%, 当波长与船长比为1.50时, 采用三维时域方法计算的垂荡幅值响应因子和纵摇幅值响应因子分别比试验值小3.0%和11.3%, 采用三维频域方法计算的垂荡幅值响应因子比试验值大9.8%, 纵摇幅值响应因子比试验值小23.6%。可见, 采用三维时域方法能准确地仿真船舶在波浪中的运动时间历程。Abstract: The series expansion method was adopted in the short time interval region, the asymptotic expansion method was adopted in the long time interval region, and the precise integration method was adopted in the transitional region between the short and long time interval regions to numerically calculate the three-dimensional time-domain Green function. The radiation and diffraction problems of ship were solved by the linear superposition principle. The ship motion mathematical model in regular wave was formulated. The hydrodynamic coefficients, wave exciting forces and motion time histories of a Wigley Ⅰ hull and a S60 hull were calculated by the numerical method when they sail on the wave with a Froude number of 0.2. Calculation result shows that due to the influence of irregular frequencies, when the dimensionless frequency is 1.7, the numerical result of heave added mass of Wigley Ⅰ hull is 44% smaller than the test result. When the dimensionless frequency is 2.5, the numerical result of pitch damping coefficient of S60 hull is 43% smaller than the test result. As the incident wave frequency increases, for a Wigley Ⅰ hull and a S60 hull, the relative errors of hydrodynamic coefficients and wave exciting forces between most of the numerical results and the test results are less than 30%, and the two have a same variation trend. For a Wigley Ⅰ hull, when the ratio of wave length to ship length is 1.25, the heave response amplitude operator and the pitch response amplitude operator calculated by the three-dimensional time-domain method are 11.3% and 4.8% smaller than the test values, respectively, the heave response amplitude operator calculated by the three-dimensional frequency-domain method is 48.4% larger than the test value, and the pitch response amplitude operator is 48.4% smaller than the test value. When the ratio of wave length to ship length is 1.50, the heave response amplitude operator and the pitch response amplitude operator calculated by the three-dimensional time-domain method are 3.0% and 11.3% smaller than the test values, respectively, the heave response amplitude operator calculated by the three-dimensional frequency-domain method is 9.8% larger than the test value, and the pitch response amplitude operator is 23.6% smaller than the test value. Thus, the three-dimensional time-domain method can accurately simulate the time history of ship motion in wave.
-
0. 引言
航海模拟器已经广泛地应用于航海教育、培训与相关科学研究中。航海模拟器的性能主要由行为真实感、物理真实感和操作环境真实感等决定[1]。行为真实感主要取决于船舶运动数学模型的可靠性与精准性。目前, 中国航海模拟器中的船舶运动数学模型很大一部分依赖于进口, 这极大地影响了中国航海模拟器的自主性与竞争力, 因此, 建立可靠、精确与实用的船舶运动数学模型具有重要意义。
船舶航行在海洋中, 时时刻刻遭受波浪的作用, 如何有效地预报船舶在波浪中每时每刻的运动姿态对航海模拟器的行为真实感具有极大意义。钱小斌等基于Froude-Krylov假设, 建立了船舶在规则波浪中的运动数学模型和受力模型[2], 但将船舶假定为箱体, 极大地限制了船舶运动模型的适用范围; 侯圣贤在二维频域理论范畴内基于普通切片法对田才图谱进行插值, 从而求得了船舶水动力系数, 并建立了船舶迎浪垂荡纵摇运动数学模型[3], 但田才图谱只适用于特定船型和频率, 极大地限制了其应用范围, 且在插值调用田才图谱时也容易产生较大误差; Salvensen等基于切片法在二维频域内建立了船舶在规则波浪中的线性运动模型, 预报结果与实船运动吻合良好[4], 但由于切片法固有的理论局限性, 只能应用于细长体(忽略船体三维几何特征) 在特定频率和航速下的运动预报, 且其对船体表面压力和随波浪下的运动预报存在不可忽视的误差。计算机性能的快速提高使得基于三维频域理论预报船舶在波浪中的运动取得了极大成果。洪亮等对有航速三维频域Green函数进行了精确数值计算, 并进一步分析了不同航速下三维移动脉动源的波形, 为三维频域内船舶水动力分析和运动预报奠定了基础[5]; 邹元杰等基于高频低速假定对零航速Green函数进行了航速修正, 并计算了船舶在波浪中低速行驶时所受的压力[6]; Guevel等基于三维频域Green函数法, 对有航速船舶的绕射与辐射问题进行了水动力分析[7]; 周正全等采用低航速理论对船舶在波浪中的相对运动进行了数值计算, 与切片法和零航速Green函数法相比, 其数值预报精度有较大提高[8]。总体来说, 三维频域理论虽然在一定程度上解决了二维切片理论适用范围不广的缺陷, 但有航速频域Green函数计算耗时且复杂, 水线积分项数值处理极其困难, 对高航速下的船舶运动预报造成了严重的误差。此外, 三维频域理论不能解决船舶操纵等瞬态问题。在三维时域范畴下, Liapis等基于三维时域Green函数法建立了船舶在静水中的水动力分析与运动模型[9, 10]; King等进一步建立了船舶在波浪中的三维时域运动模型, 精确地求解出船舶以任意航速在规则波浪中的摇荡运动, 也为甲板上浪、螺旋桨出水和舰载机着舰等其他航海情景的仿真奠定了基础[11, 12, 13, 14, 15, 16]。三维时域Green函数精确计算是准确预报船舶三维时域运动的关键。Liapis等采用小时间区域级数展开和大时间区域渐进式算法对三维时域Green函数进行了数值计算[9, 11, 17], 但其直接计算耗时较长, 且大、小时间区域划分不明确; 黄德波采用节点制表和节点间插值方法求解三维时域Green函数, 极大地缩短了三维时域Green函数的数值求解时间[18], 但由于三维时域Green函数中的被积分函数是高频振荡函数, 在大时间区域制表中节点不够密的情况下进行插值会带来较大误差; Chuang等基于Taylor级数展开求解满足三维时域Green函数的常微分方程[19, 20, 21, 22], 但当场点与源点都接近或位于自由液面时, 三维时域Green函数振荡增幅尤为剧烈, 且Taylor展开项数较难选择与判断; Li等采用精细时程积分法求解满足三维时域Green函数的常微分方程, 在大时间区域内避免了采用4阶Runge-Kutta法制表带来的三维时域Green函数发散问题[23, 24, 25, 26], 但由于其将计算域划分得过于精细, 且求解常微分方程过程中所形成的系数矩阵阶数较高, 导致其制表耗时过长。
针对现有航海模拟器中船舶运动数学模型建模方法的不足, 本文基于三维时域理论建立船舶在规则波浪中的运动数学模型, 将三维时域Green函数划分为3个时间区域[27], 在小时间区域采用级数展开法, 在中间过渡时间区域采用精细积分法, 在大时间区域采用渐进展开法, 并对三维时域Green函数进行数值计算; 将三维时域Green函数分为振荡较为激烈的解析解部分与振荡较为平缓的数值解部分, 并对平缓数值解部分进行节点制表以便插值调用; 以Wigley Ⅰ型船舶与S60型船舶为仿真对象, 对比数值计算结果和试验结果, 以验证在规则波浪中建立的船舶运动数学模型的精准性与可靠性。
1. 船舶在规则波浪中的运动数学模型
1.1 建立坐标系
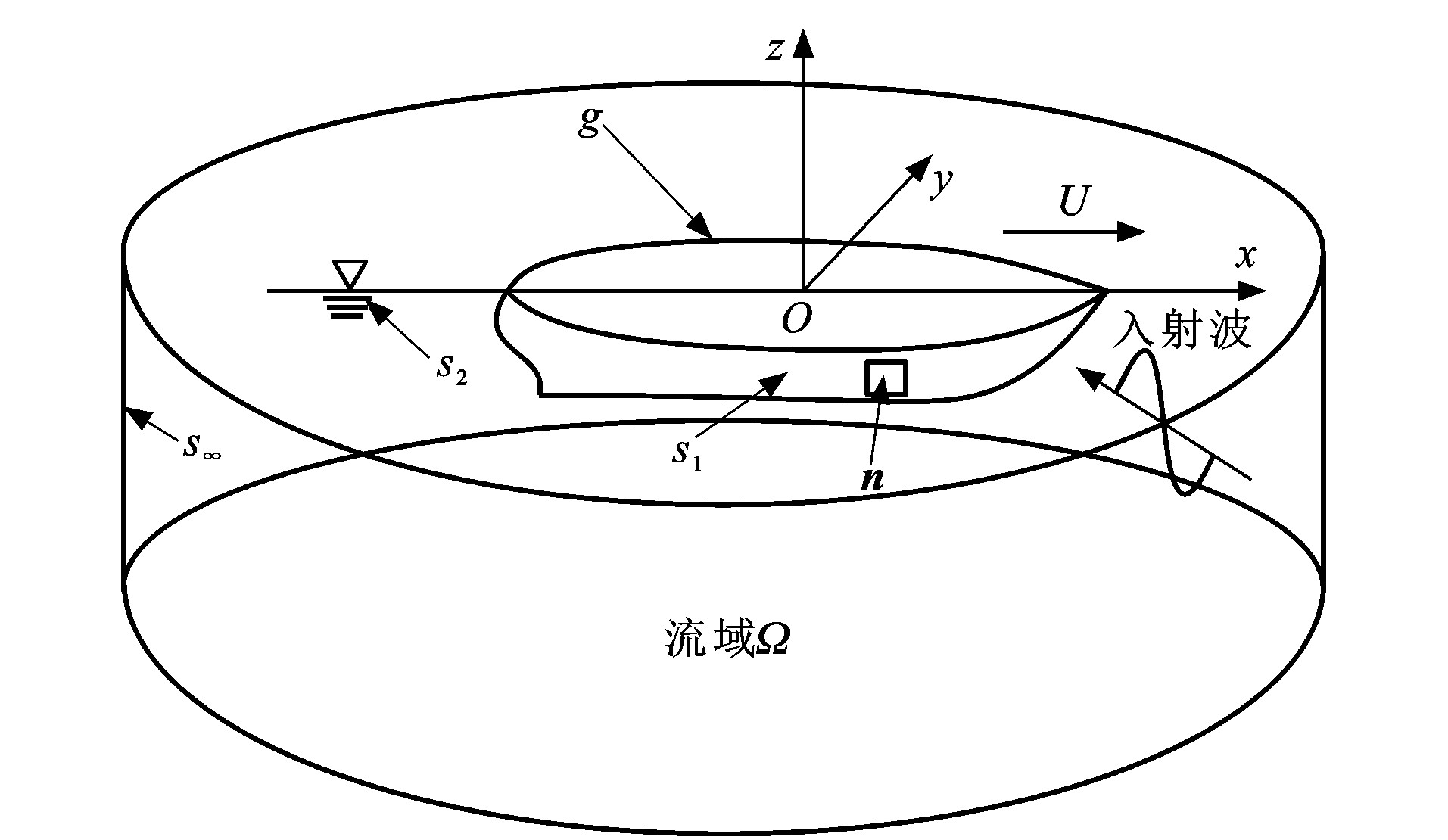
为便于研究船舶在波浪中的运动情况, 采用随船运动坐标系, 见图 1, 参考坐标系Oxyz随船舶以定常且平行于x轴的航速U移动, xOy面与静水面(z=0) 重合, z轴垂直向上; 流域Ω由船体平均湿表面S1、线性自由液面S2和无穷远处控制面S∞围成; n为单位法线矢量, 指向船体内部; S1与S2的交线为γ, 以逆时针方向为正方向。
1.2 边界条件与初值条件
本文在势流理论的范畴内进行研究, 假定流体无黏性, 流动无旋且不可压缩, 在Oxyz参考坐标系下流场存在速度势Φ1, 基于线性理论可以将速度势Φ1分解为[11]
Φ1=-Ux+Φ2(x,y,z,t)+ϕ0(x,y,z,t)+7∑k=1ϕk(x,y,z,t) (1)
式中: Φ2 (x, y, z, t) 为由定常速度产生的兴波速度势; ϕ0 (x, y, z, t) 为入射波速度势; ϕk (x, y, z, t) 为不定常速度势, 其中ϕ1 (x, y, z, t)、ϕ2 (x, y, z, t)、…、ϕ6 (x, y, z, t) 为辐射速度势, ϕ7 (x, y, z, t) 为绕射速度势; t为当前时刻。
不定常速度势ϕk (x, y, z, t) 应满足如下条件。
(1) 在流域Ω中满足Laplace方程
∇2ϕk(x,y,z,t)=0 (2)
式中: ∇2为Laplace算子。
(2) 在线性自由液面S2处应满足的条件为
(∂∂t-U∂∂x)2ϕk(x,y,z,t)+ g∂ϕk(x,y,z,t)∂z=0 (3)
式中: g为重力加速度。
(3) 在船体平均湿表面S1处应满足的条件为
∂ϕ7(x,y,z,t)∂n=-∂ϕ0(x,y,z,t)∂n (4)∂ϕk(x,y,z,t)∂n=nk⋅ζk(t)+mkζk(t) (5)
式中: ζk (t) 为船舶k (k=1, 2, …, 6) 模态运动位移; nk为广义法向量的k模态分量; mk为恒定速度的k模态梯度。
由船体几何形状可得k模态的nk和mk分别为[9]
r=(x,y,z) (6)n=(n1,n2,n3) (7)r×n=(n4,n5,n6) (8)(m1,m2,m3)=(0,0,0) (9)(m4,m5,m6)=(0,Un3,-Un2) (10)
式中: r为船体平均湿表面上任意一点的位置矢量。
(4) 在无穷远处控制面S∞处应满足的条件为
ϕk(x,y,z,t),∇ϕk(x,y,z,t)→0 (11)
(5) 初始条件为
{ϕk(x,y,z,t)=0∂ϕk(x,y,z,t)/∂t=0t0=0 k=1,2,⋯,6t0=-∞ k=7 (12)
式中: t0为初始时刻。
引入三维时域Green函数求解上述定解问题, 则无限水深三维时域Green函数G (x1, y1, z1, x2, y2, z2, t, τ) 为[9]






式中: R1为场点P (x1, y1, z1) 到源点Q (x2, y2, z2) 的距离; R2为场点P与源点Q关于静水面镜像点的距离; R3为场点P到源点Q的水平距离; τ为过去某一时刻; δ (·) 为Dirac函数; H (·) 为单位阶跃函数; J0 (·) 为第1类0阶贝塞尔函数; K为波数; G1 (x1, y1, z1, x2, y2, z2, t, τ) 为三维时域Green函数的波动部分; G0 (x1, y1, z1, x2, y2, z2) 为三维时域Green函数的瞬时部分。
三维时域Green函数的瞬时部分G0 (x1, y1, z1, x2, y2, z2) 在四边形平面面元积分可以用Hess-Smith方法[28]计算。
不定常速度势ϕk (x1, y1, z1, t) 的边界积分方程为[11]
2πϕk(x1,y1,z1,t)+∬S1ϕk(x2,y2,z2,t)∂G0(x1,y1,z1,x2,y2,z2)∂nQdS=∬S1G0(x1,y1,z1,x2,y2,z2)⋅∂ϕk(x2,y2,z2,t)∂nQdS+∫tt0dτ∬S1G1(x1,y1,z1,x2,y2,z2,t,τ)∂ϕk(x2,y2,z2,τ)∂nQdS-∫tt0dτ∬S1ϕk(x2,y2,z2,τ)∂G1(x1,y1,z1,x2,y2,z2,t,τ)∂nQdS-U2g∫tt0dτ∮γϕk(x2,y2,z2,τ)⋅∂G1(x1,y1,z1,x2,y2,z2,t,τ)∂x2dy2+U2g∫tt0dτ∮γG1(x1,y1,z1,x2,y2,z2,t,τ)∂ϕk(x2,y2,z2,τ)∂x2dy2+2Ug∫tt0dτ∮γϕk(x2,y2,z2,τ)∂G1(x1,y1,z1,x2,y2,z2,t,τ)∂τdy2 (19)
式中: S为积分面积变量; nQ为源点Q处的单位法线矢量。
将船体平均湿表面离散为满足精度要求的一定数量的四边形平面面元, 并假定各个面元上的不定常速度势为常数(常数面元法), 建立线性方程组, 求解出每个面元上的不定常速度势。
1.3 辐射问题求解
应用脉冲响应方法, 则辐射速度势ϕk (x1, y1, z1, t) (k=1, 2, …, 6) 可表示为[9]
ϕk(x1,y1,z1,t)=∫t0φk(x1,y1,z1, t-τ)⋅ζk(τ)dτ (20)
式中: φk (x1, y1, z1, t) 为辐射速度势ϕk (x1, y1, z1, t) 的脉冲响应函数。
ϕk (x1, y1, z1, t) 可由瞬时部分Ψ1k (x1, y1, z1) 和记忆部分Ψ2k (x1, y1, z1)、χk (x1, y1, z1, t) 组成, 即
φk (x1, y1, z1, t) =Ψ1k (x1, y1, z1) δ (t) +
Ψ2k (x1, y1, z1) H (t) +χk (x1, y1, z1, t) (21)
将式(20)、(21) 代入式(19) 即可得到船体表面各个面元上的Ψ1k (x1, y1, z1)、Ψ2k (x1, y1, z1) 和χk (x1, y1, z1, t)。则由k模态运动引起j模态辐射力和力矩Fjk (t) 可表示为
Fjk(t)=-ajk⋅⋅ζk(t)-bjk⋅ζk(t)-cjkζk(t)- ∫t0dτκjk(t-τ)⋅ζk(τ) (22)ajk=-ρ∬S1Ψ1k(x1,y1,z1)njdS (23)bjk=-ρ∬S1[Ψ2k(x1,y1,z1)nj-Ψ1k(x1,y1, z1)mj]dS (24)cjk=-ρ∬S1Ψ2k(x1,y1,z1)mjdS (25)κjk(t)=ρ∬S1[∂χk(x1,y1,z1,t)∂tnj- χk(x1,y1,z1,t)mj]dS (26)
式中: ρ为流体密度; nj (j=1, 2, …, 6) 为广义法向量的j模态分量; mj为恒定速度的j模态梯度; ajk为由k模态运动引起的j模态下与船体几何形状有关的参数; bjk、cjk均为由k模态运动引起的j模态下与船体几何形状及航速有关的参数; κjk (t) 为与船体几何形状、航速和时间有关的参数。
由傅里叶变换[10]得, 频域内附加质量Ajk (ω) 与阻尼系数Bjk (ω) 为
{Ajk(ω)=ajk-1ω∫+∞0κjk(τ)sin(ωτ)dτ-cjkω2Bjk(ω)=bjk+∫+∞0κjk(τ)cos(ωτ)dτ (27)
式中: ω为波浪圆频率。
1.4 绕射问题求解
在参考坐标系下, 入射波速度势为
ϕ0(x1,y1,z1,t)=iξ0gωeΚ[z1-i(x1cos(α)+y1sin(α))]eiωet (28)ωe=ω-UΚcos(α) (29)
式中: α为浪向角; ξ0为波幅; ωe为遭遇频率。
原点处的入射波波幅ξ1 (t) 为
ξ1(t)=ξ0eiωet (30)
入射波波幅ξ1 (t) 作为线性系统输入, W1 (x1, y1, z1, t) 为入射波速度势的速度场脉冲响应函数, 则入射波速度势的速度场[11]可表示为


结合式(28)、(30) 和(31) 并通过傅里叶变换可得W1 (x1, y1, z1, t)。时域线性系统下任意入射波压力p (x1, y1, z1, t) 为
p(x1,y1,z1,t)=∫+∞-∞dτp1(x1,y1,z1, t-τ)ξ1(τ) (32)
式中: p1 (x1, y1, z1, t) 为入射波压力的脉冲响应函数。
由线性Bernoulli方程可得参考坐标系下的入射波压力p (x1, y1, z1, t) 为
p(x1,y1,z1,t)=ρgξ0eΚ[z1-i(x1cos(α)+y1sin(α))]eiωet (33)
结合式(32)、(33) 和傅里叶变换可得p1 (x1, y1, z1, t)。将入射波压力在船体湿表面上积分得到j模态Froude-Krylov力FjI (t) 为
FjΙ(t)=∬S1p(x1,y1,z1,t)njdS= ∫+∞-∞ξ1(τ)dτ∬S1p1(x1,y1,z1,t-τ)njdS (34)
j模态Froude-Krylov力FjI (t) 的脉冲响应函数WjI (t) 为
WjΙ(t)=∬S1p1(x1,y1,z1,t-τ)njdS (35)
则j模态Froude-Krylov力FjI (t) 的脉冲表达式为
FjΙ(t)=∫+∞-∞WjΙ(t-τ)ξ1(τ)dτ (36)
绕射速度势ϕ7 (x1, y1, z1, t) 应用脉冲响应方法表示为
ϕ7 (x1, y1, z1, t) =∫ +∞-∞ φ7 (x1, y1, z1, t-τ) ξ1 (τ) dτ (37)
式中: φ7 (x1, y1, z1, t) 为绕射速度势ϕ7 (x1, y1, z1, t) 的脉冲响应函数。
由式(4)、(31) 和(37) 可得[29]
∂ϕ7(x1,y1,z1,t)∂n=-nW1(x1,y1,z1,t-τ) (38)
结合式(19)、(31)、(37) 和(38) 便可求得φ7 (x1, y1, z1, t), 则j模态绕射力的脉冲响应函数Wj7 (t) 为
Wj7(t)=∬S1ρ[φ7(x1,y1,z1,t)mj-∂φ7(x1,y1,z1,t)nj∂t]dS (39)
则j模态波浪激励力Fjw (t) 由j模态Froude-Krylov力FjI (t) 和j模态绕射力Fj7 (t) 组成, 即
Fjw (t) =FjI (t) +Fj7 (t) =∫ +∞-∞ ζ1 (τ) WjI (t-τ) +Wj7 (t-τ) dτ (40)
1.5 运动微分方程求解
将船舶作为刚体考虑, 根据牛顿第二定律, 可得有航速船舶运动方程为
6∑k=1Μjk⋅⋅ζk(t)=Fj(t) (41)
式中: Fj (t) 为j模态船舶所受的合力; Mjk为广义质量矩阵的元素。
将由k模态运动引起的j模态辐射力Fjk (t)、波浪激励力Fjw (t) 和静水恢复力Fjs (t) 代入式(41) 可得
6∑k=1[(Μjk+ajk)⋅⋅ζk(t)+bjk⋅ζk(t)+(Cjk+cjk)ζk(t)+ ∫t0dτκjk(t-τ)⋅ζk(τ)]=Fjw(t) (42)
式中: Cjk为恢复力系数矩阵的元素。
在初始的短时间(一般设置为2个波浪遭遇周期) 内对式(42) 右端波浪力应用平滑函数, 以避免由于初始扰动造成的数值发散。运动微分方程可采用4阶Runge-Kutta法等数值方法求解, 最终得到稳定的船舶运动时间历程。
2. 三维时域Green函数计算
2.1 三维时域Green函数波动项计算
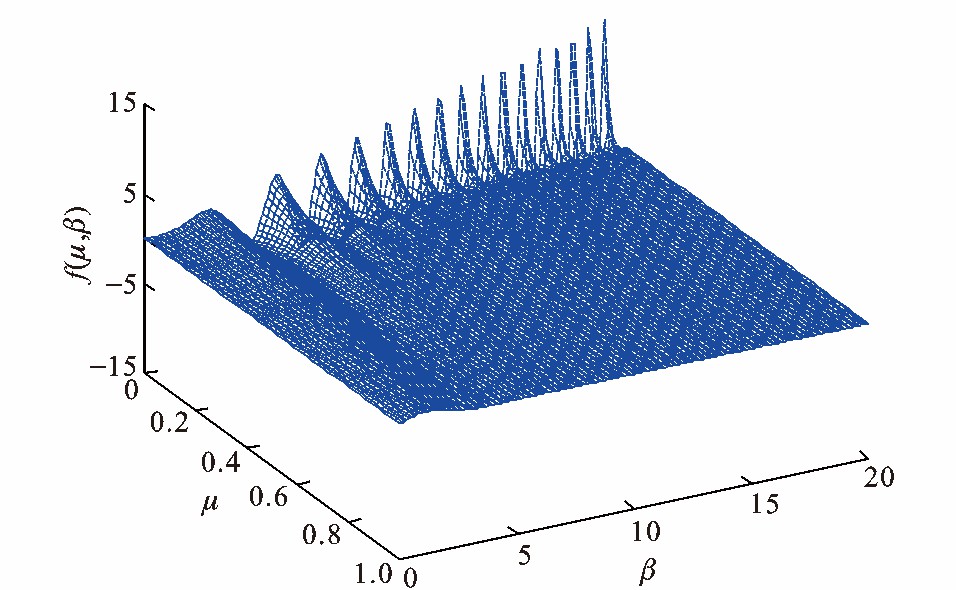
令μ=cos (θ) =- (z1+z2) /R2 (θ为地顶角), q=KR2, 量纲一时间β为√g/R2(t-τ), 则式(15) 可以写为
G1(x1,y1,z1,x2,y2,z2,t,τ)=2√g/R32f(μ,β) (43)f(μ,β)=∫+∞0√qsin(β√q)e-qμJ0(q√1-μ2)dq (44)
将β划分为3个区间段, 分别为0≤β≤2、2 < β≤12和β > 12。当0≤β≤2时, f (μ, β) 为
f(μ,β)=+∞∑n=0(-1)nβ2n+1(n+1)!(2n+1)!Ρn+1(μ) (45)
式中: Pn (μ) 为关于μ的n阶Legendre函数。
当2 < β≤12时, f (μ, β) 满足关于β的四阶常微分方程[12]为
∂4f(μ,β)∂β4+μβ∂3f(μ,β)∂β3+β2+16μ4∂2f(μ,β)∂β2+ 7β4∂f(μ,β)∂β+7f(μ,β)4=0 (46)
采用式(45) 计算出f (μ, β) 及其1~3阶导数在β=2时的值并作为式(46) 的初值, 接着采用文献[23]中提出的精细积分法求解式(46)。
当β > 12时, f (μ, β) 为
f(μ,β)=(iβ)3+∞∑n=0(2n+2)!n!2β2nΡn(μ)+ e-β2μ/4√2√1-μ2+∞∑n=02(√1-μ2)n⋅ +∞∑n=0dmneiθmn(2β)2m+2n-1 (47) θmn=β24√1-μ2+(34-2m+n2)π+ (m+2n-32)θ (48) cn=[Γ(n+1/2)]22nπn! (49) dmn={cn(1-2n)!(1-2m-2n)!22mm!1-2n>0cn(2m+2n-2)!(2n-2)!22mm!1-2n≤0 (50)
式中: Γ (·) 为伽马函数; m为整数变量。
2.2 三维时域Green函数波动项节点制表
申亮等采用4阶Runge-Kutta法求解式(46) [25], 本文采用精细积分法[24]求解式(46)。2种方法均以式(45) 的计算结果作为式(46) 的初值。当μ=0时, f (0, β) 解析解为
f(0,β)=πβ316√2[J14(β28)J-14(β28)+J34(β28)J-34(β28)] (51)
式中: J14、J-14、J34和J-34分别为第1类14、-14、34、-34阶贝塞尔函数。
统一以精细积分法求解式(46), 作为4阶Runge-Kutta法和精细积分法求解式(46) 的初值, 计算步长Δβ=0.01。
表 1为4阶Runge-Kutta法和精细积分法的计算结果与解析解的相对误差, 可知: 在相同步长和初始值下, 在过渡时间区域采用精细积分法所得结果的精度比4阶Runge-Kutta法有极大的提高。
表 1 不同方法计算所得f (0, β) 的相对误差Table 1. Relative errors of f (0, β) calculated by different methods计算方法 β取值不同时各方法计算结果与解析解的相对误差 2.53 6.26 9.15 12.48 4阶Runge-Kutta法 3.0×10-5 2.9×10-2 -2.5×10-2 6.8×10-3 精细积分法 1.3×10-16 4.7×10-14 6.3×10-15 -5.1×10-14 图 2为本文方法计算所得f (μ, β), 可知: 当场点与源点靠近或位于水面时, 即μ较小时, f (μ, β) 在β方向上具有强烈的振荡增幅特性; 随着μ的逐渐增大, 其在β方向上的振荡幅度逐渐变小; f (μ, β) 变化趋势符合三维时域Green函数波动项的性质, 可验证本文三维时域Green函数波动项节点制表的可靠性。
f (μ, β) 可以写为[29]
f(μ,β)=e-β2μ/4f(0,β)+f0(μ,β) (52)
式中: f0 (μ, β) 为f (μ, β) 中变化平缓的部分。
经过数值试验可知, 将f (0, β) 按式(51) 进行计算并以二进制文本形式存储, 其中计算步长Δβ取0.001, 此时线性插值即可满足精度要求。将f0 (μ, β) 在μ、β方向上以适当的均匀间隔存储, 经过数值试验可得, 取计算步长Δμ、Δβ分别为0.005、0.010时即可满足工程精度要求。同理, 可以得到三维时域Green函数波动项空间和时间导数的制表。
3. 数值模拟结果分析
3.1 仿真对象
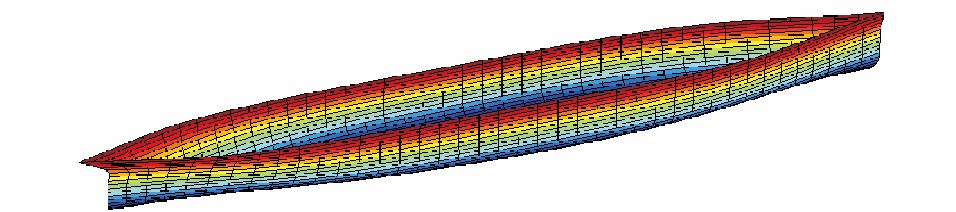
为验证在航海模拟器中建立船舶运动模型的可靠性, 在迎浪海况下, 当船舶前进航速的Froude数为0.2时, 对Wigley Ⅰ型船舶和S60型船舶进行仿真, 2种船型的主要参数见表 2, 面元分布分别见
表 2 Wigley Ⅰ型船舶与S60型船舶的参数Table 2. Parameters of Wigley Ⅰand S60 hulls船型 船长L/m 船宽/m 吃水/m 排水量/m3 纵摇惯性半径 重心距离基线距离/m 方形系数 Wigley Ⅰ 3 0.3 0.187 5 0.094 6 0.25L 0.17 0.56 S60 140 20 8 15 680 0.25L 8 0.70 3.2 辐射问题分析
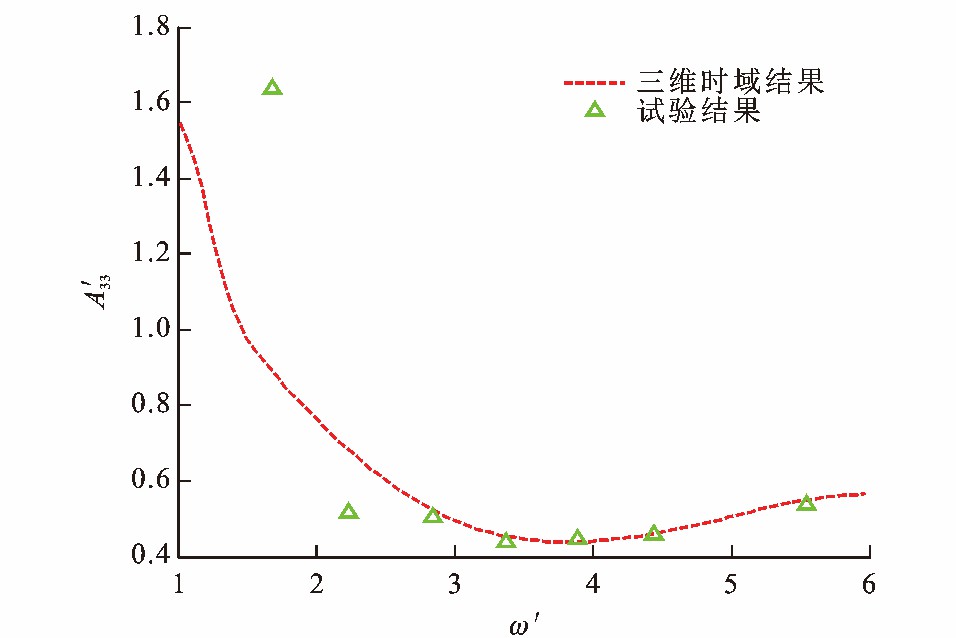
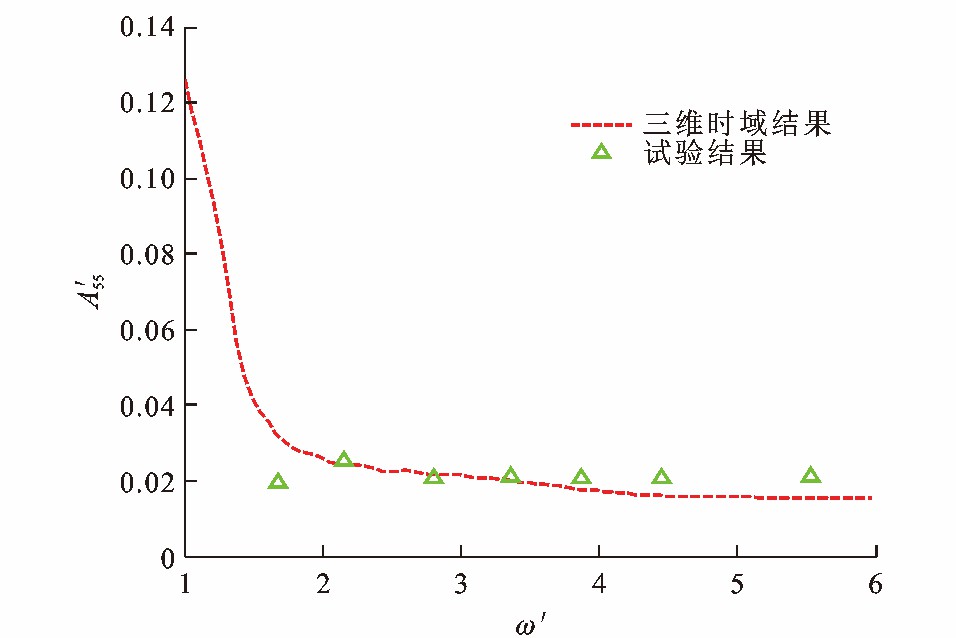
对比影响船舶运动性能较大的水动力系数(包括附加质量和阻尼系数) A33、B33、A55和B55, 其量纲一形式A′33、B′33、A′55、B′55和波浪圆频率ω的量纲一形式ω′分别为
A′33=A33/(ρV) (53)B′33=B33√L/gρV (54)A′55=A55/(ρVL2) (55)B′55=B55√L/gρVL2 (56)ω′=ω√L/g (57)
式中: V为船舶排水体积。
图 5~8为Wigley Ⅰ型船舶水动力系数, 可知: 由于不规则频率的影响, 在低频处, 当量纲一频率为1.7时, 垂荡附加质量计算结果比试验结果低44%, 垂荡阻尼系数和纵摇阻尼系数计算结果分别比试验结果高21%和67%;随着量纲一频率的增加, 垂荡附加质量与阻尼系数的大部分数值计算结果与试验值的相对误差小于20%。可见, Wigley Ⅰ型船舶的水动力系数计算结果与文献[30]中的试验值在大部分频率范围内能较好地吻合。
 图 6 Wigley Ⅰ型船舶量纲一垂荡阻尼系数Figure 6. Dimensionless heave damping coefficients of Wigley Ⅰ hull
图 6 Wigley Ⅰ型船舶量纲一垂荡阻尼系数Figure 6. Dimensionless heave damping coefficients of Wigley Ⅰ hull 图 8 Wigley Ⅰ型船舶量纲一纵摇阻尼系数Figure 8. Dimensionless pitch damping coefficients of Wigley Ⅰ hull
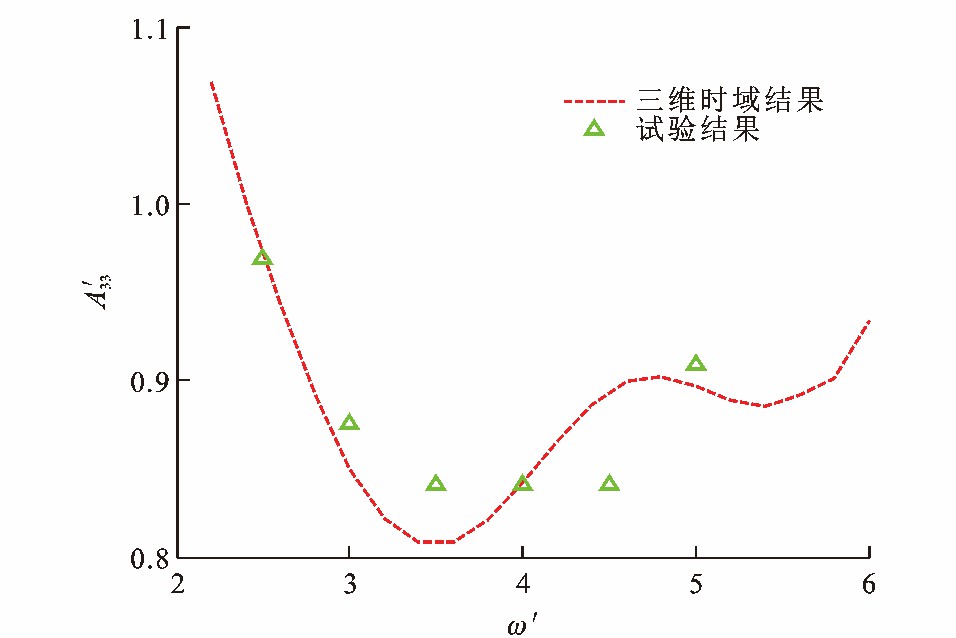
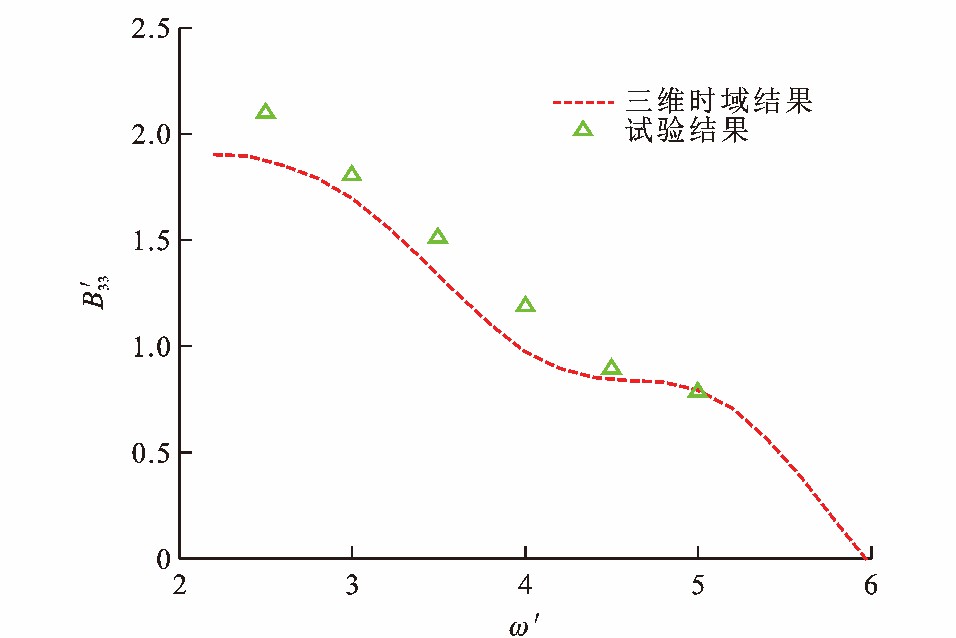
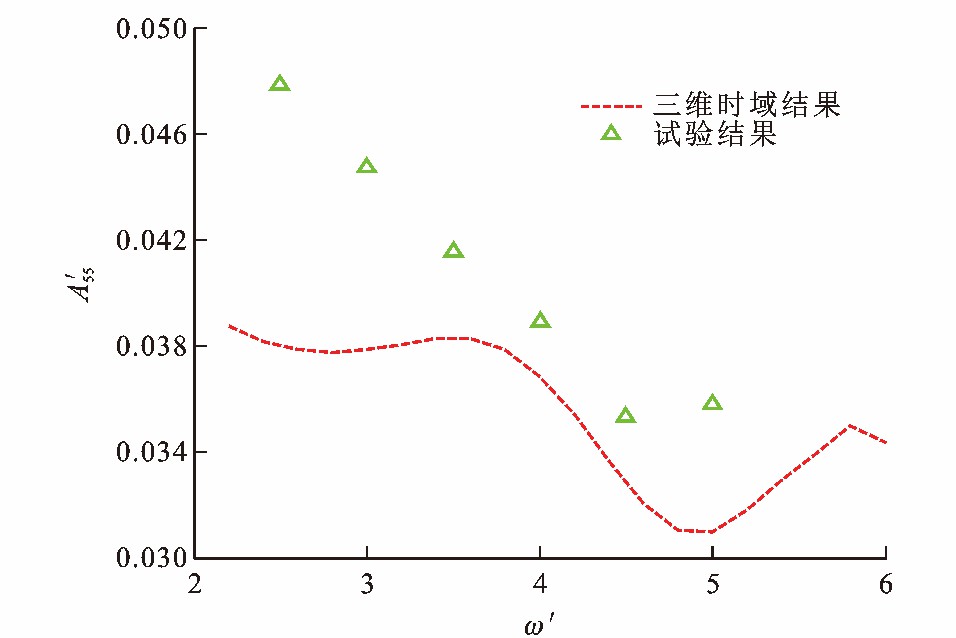
图 8 Wigley Ⅰ型船舶量纲一纵摇阻尼系数Figure 8. Dimensionless pitch damping coefficients of Wigley Ⅰ hull图 9~12为S60型船舶水动力系数, 可知: 由于不规则频率的影响, 在低频处, 当量纲一频率为2.5时, 纵摇附加质量和纵摇阻尼系数的计算结果分别比试验结果低21%和43%;随着量纲一频率的增加, 垂荡附加质量与阻尼系数的大部分数值计算结果与试验值的相对误差小于30%。可见, S60型船舶的水动力系数计算结果与文献[31]中的试验值在大部分频率范围内能较好地吻合。
3.3 绕射问题分析
对波浪激励力进行傅里叶变换可以得到垂荡波浪力的频响函数F3w (ωe) 与纵摇波浪力的频响函数F5w (ωe) 的量纲一形式F′3w和F′5w分别为
F′3w=F3wωeL/(ρgVξ0) (58)F′5w=F5wωe/(ρgVξ0) (59)
 图 13 Wigley Ⅰ型船舶量纲一垂荡波浪力幅值Figure 13. Dimensionless heave wave exciting force amplitudes of Wigley Ⅰ hull
图 13 Wigley Ⅰ型船舶量纲一垂荡波浪力幅值Figure 13. Dimensionless heave wave exciting force amplitudes of Wigley Ⅰ hull 图 14 Wigley Ⅰ型船舶量纲一纵摇波浪力幅值Figure 14. Dimensionless pitch wave exciting force amplitudes of Wigley Ⅰ hull
图 14 Wigley Ⅰ型船舶量纲一纵摇波浪力幅值Figure 14. Dimensionless pitch wave exciting force amplitudes of Wigley Ⅰ hull图 13、14为Wigley Ⅰ型船舶所受波浪激励力, 其中KL为波数的量纲一形式, 可知: Wigley Ⅰ型船舶所受的垂荡波浪力与纵摇波浪力的频率响应的数值计算结果与试验值的相对误差小于10%。
 图 15 S60型船舶量纲一垂荡波浪力幅值Figure 15. Dimensionless heave wave exciting force amplitudes of S60 hull
图 15 S60型船舶量纲一垂荡波浪力幅值Figure 15. Dimensionless heave wave exciting force amplitudes of S60 hull 图 16 S60型船舶量纲一纵摇波浪力幅值Figure 16. Dimensionless pitch wave exciting force amplitudes of S60 hull
图 16 S60型船舶量纲一纵摇波浪力幅值Figure 16. Dimensionless pitch wave exciting force amplitudes of S60 hull图 15、16为S60型船舶所受波浪激励力幅值, 可知: S60型船舶所受的垂荡波浪力与纵摇波浪力的频响函数的大部分计算结果与试验值的相对误差小于20%, 二者吻合较好。
3.4 规则波浪中船舶的运动仿真
为与文献[30]中的试验结果对比, 本文只对Wigley Ⅰ型船舶进行垂荡和纵摇2个自由度的运动数值模拟, 垂荡位移ζ3、纵摇位移ζ5和时间t的量纲一形式ζ′3、ζ′5和t′分别为
ζ′3=ζ3/ζ0 (60)ζ′5=ζ5L/(2πζ0) (61)t′=t/Τw (62)
式中: Tw为遭遇周期。
波浪参数设定: 波幅ξ0为0.018 m; 波长λ与船长比λ/L分别为1.25、1.50和2.00;浪向角α为π。图 17~22为Wigley Ⅰ型船舶在不同波长处14个周期的垂荡纵摇运动的响应时间历程, 可知: 当λ/L=1.25时, 三维时域方法计算的垂荡幅值响应因子和纵摇幅值响应因子分别比试验值低11.3%和4.8%, 三维频域方法计算的垂荡幅值响应因子比试验值高48.4%, 纵摇幅值响应因子比试验值低48.4%;当λ/L=1.50时, 三维时域方法计算的垂荡幅值响应因子和纵摇幅值响应因子分别比试验值低3.0%和11.3%, 三维频域方法计算的垂荡幅值响应因子比试验值高9.8%, 纵摇幅值响应因子比试验值低23.6%;当λ/L=2.0时, 三维时域方法计算的垂荡幅值响应因子比试验值高1.6%, 纵摇幅值响应因子比试验低7.3%, 三维频域方法计算的垂荡幅值响应因子和纵摇幅值响应因子分别比试验值低0.5%和7.3%;经过3~5个波浪遭遇周期之后, 初始瞬时扰动效应渐渐消失, 运动时间历程趋于平稳, 证明了本文开发的三维时域数值程序的稳定性; 入射波较长时, 本文的三维时域方法和三维频域方法均可得到较好的船舶运动数值解, 但入射波长较短时, 三维时域方法比三维频域方法更接近试验值; 入射波较短时[6], 绕射力与辐射力合力占船体受力比例较大, 对船舶运动影响较大; 采用三维频域方法求解绕射力与辐射力时, 由于有航速频域Green函数数值求解复杂且误差较大, 最终造成船舶运动预报误差较大。综上所述, 本文提出的三维时域方法较三维频域方法具有更强的适用性。
 图 17 λ/L为1.25时Wigley Ⅰ型船舶量纲一垂荡运动时间历程Figure 17. Dimensionless heave motion time histories of Wigley Ⅰ hull when λ/L is 1.25
图 17 λ/L为1.25时Wigley Ⅰ型船舶量纲一垂荡运动时间历程Figure 17. Dimensionless heave motion time histories of Wigley Ⅰ hull when λ/L is 1.25 图 18 λ/L为1.25时Wigley Ⅰ型船舶量纲一纵摇运动时间历程Figure 18. Dimensionless pitch motion time histories of Wigley Ⅰ hull when λ/L is 1.25
图 18 λ/L为1.25时Wigley Ⅰ型船舶量纲一纵摇运动时间历程Figure 18. Dimensionless pitch motion time histories of Wigley Ⅰ hull when λ/L is 1.25 图 19 λ/L为1.50时Wigley Ⅰ型船舶量纲一垂荡运动时间历程Figure 19. Dimensionless heave motion time histories of Wigley Ⅰ hull when λ/L is 1.50
图 19 λ/L为1.50时Wigley Ⅰ型船舶量纲一垂荡运动时间历程Figure 19. Dimensionless heave motion time histories of Wigley Ⅰ hull when λ/L is 1.50 图 20 λ/L为1.50时Wigley Ⅰ型船舶量纲一纵摇运动时间历程Figure 20. Dimensionless pitch motion time histories of Wigley Ⅰ hull when λ/L is 1.50
图 20 λ/L为1.50时Wigley Ⅰ型船舶量纲一纵摇运动时间历程Figure 20. Dimensionless pitch motion time histories of Wigley Ⅰ hull when λ/L is 1.50 图 21 λ/L为2.0时Wigley Ⅰ型船舶量纲一垂荡运动时间历程Figure 21. Dimensionless heave motion time histories of Wigley Ⅰ hull when λ/L is 2.0
图 21 λ/L为2.0时Wigley Ⅰ型船舶量纲一垂荡运动时间历程Figure 21. Dimensionless heave motion time histories of Wigley Ⅰ hull when λ/L is 2.0 图 22 λ/L为2.0时Wigley Ⅰ型船舶量纲一纵摇运动时间历程Figure 22. Dimensionless pitch motion time histories of Wigley Ⅰ hull when λ/L is 2.0
图 22 λ/L为2.0时Wigley Ⅰ型船舶量纲一纵摇运动时间历程Figure 22. Dimensionless pitch motion time histories of Wigley Ⅰ hull when λ/L is 2.04. 结语
(1) 在线性时域理论范畴内, 本文基于三维时域Green函数法, 为航海模拟器建立可靠实用的船舶在规则波中的运动数学模型, 可以进一步提高航海模拟器的行为真实感。
(2) 在数值计算三维时域Green函数时, 在大、小时间过渡区域采用精细积分法, 其数值精度较4阶Runge-Kutta法有较大提高。特别是当μ=0时, 采用精细积分法的数值计算结果精度较4阶Runge-Kutta法提高了至少10个数量级。进一步将三维时域Green函数分为解析表达的波动剧烈项与可以插值调用的波动平缓项, 并根据实际工程应用进行节点制表, 可为三维时域内研究船舶水动力系数和运动提供有效的求解器。
(3) 通过对Wigley Ⅰ型船舶和S60型船舶进行水动力分析与运动数值计算, 水动力系数与波浪力频响函数的数值结果与试验结果吻合良好。对于Wigley Ⅰ型船舶运动响应预报, 当λ/L=1.25时, 采用三维频域方法计算所得垂荡纵摇幅值响应因子比试验值大48.4%, 而采用三维线性时域方法计算所得垂荡幅值响应因子和纵摇幅值响应因子分别比试验值低11.3%和4.8%, 与试验结果吻合良好, 因此, 基于三维时域方法所构建的船舶运动数学模型具有较强的工程适用性。
(4) 在海况恶劣情况时, 船舶摇荡运动较为剧烈, 具有强非线性的运动特性, 此时线性理论难以满足建模要求, 因此, 如何为航海模拟器建立船舶非线性运动数学模型是下一步研究的重点。
-
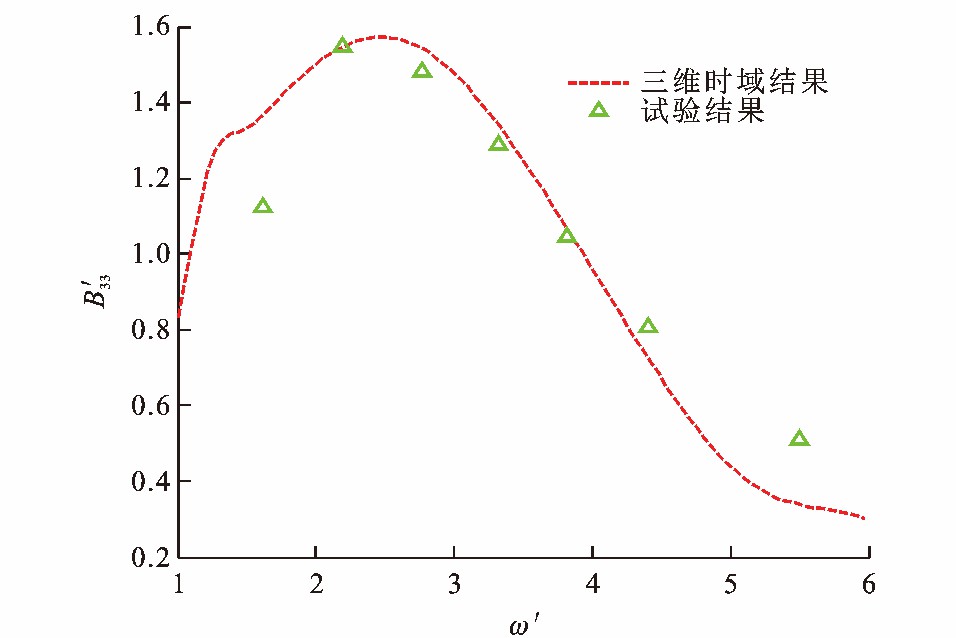
图 6 Wigley Ⅰ型船舶量纲一垂荡阻尼系数
Figure 6. Dimensionless heave damping coefficients of Wigley Ⅰ hull
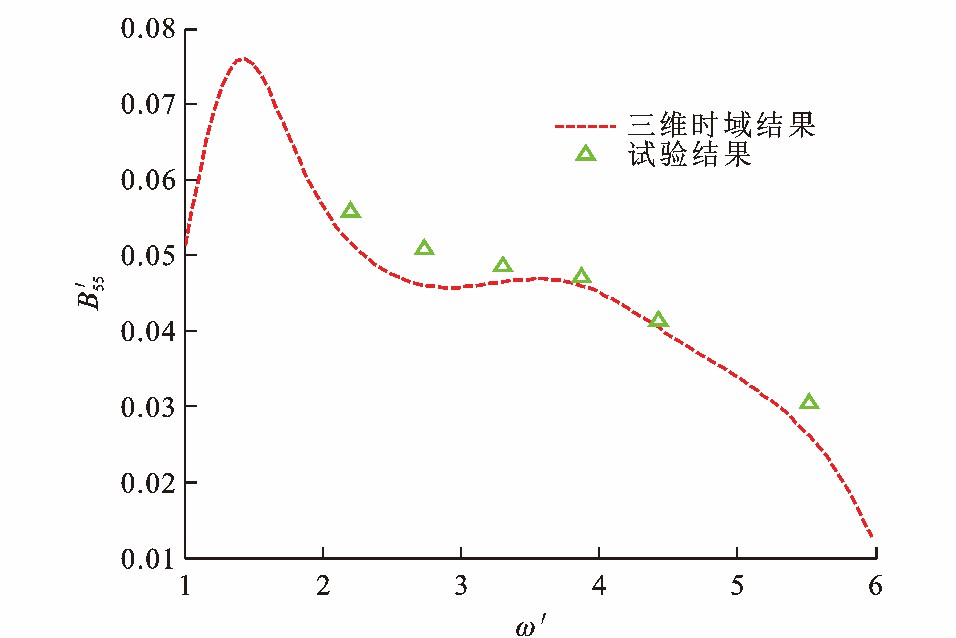
图 8 Wigley Ⅰ型船舶量纲一纵摇阻尼系数
Figure 8. Dimensionless pitch damping coefficients of Wigley Ⅰ hull

图 13 Wigley Ⅰ型船舶量纲一垂荡波浪力幅值
Figure 13. Dimensionless heave wave exciting force amplitudes of Wigley Ⅰ hull
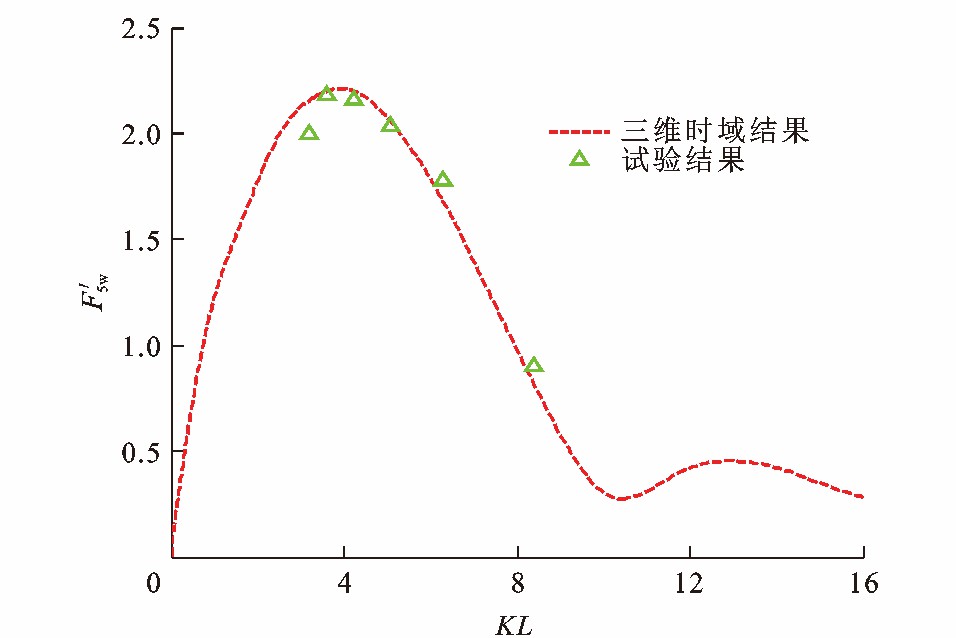
图 14 Wigley Ⅰ型船舶量纲一纵摇波浪力幅值
Figure 14. Dimensionless pitch wave exciting force amplitudes of Wigley Ⅰ hull
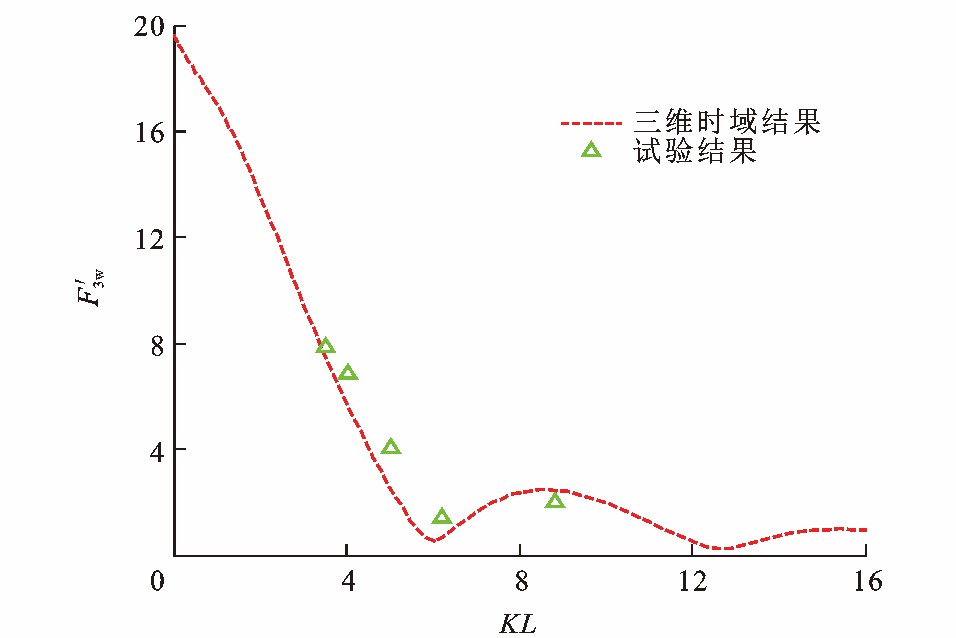
图 15 S60型船舶量纲一垂荡波浪力幅值
Figure 15. Dimensionless heave wave exciting force amplitudes of S60 hull

图 16 S60型船舶量纲一纵摇波浪力幅值
Figure 16. Dimensionless pitch wave exciting force amplitudes of S60 hull

图 17 λ/L为1.25时Wigley Ⅰ型船舶量纲一垂荡运动时间历程
Figure 17. Dimensionless heave motion time histories of Wigley Ⅰ hull when λ/L is 1.25

图 18 λ/L为1.25时Wigley Ⅰ型船舶量纲一纵摇运动时间历程
Figure 18. Dimensionless pitch motion time histories of Wigley Ⅰ hull when λ/L is 1.25

图 19 λ/L为1.50时Wigley Ⅰ型船舶量纲一垂荡运动时间历程
Figure 19. Dimensionless heave motion time histories of Wigley Ⅰ hull when λ/L is 1.50

图 20 λ/L为1.50时Wigley Ⅰ型船舶量纲一纵摇运动时间历程
Figure 20. Dimensionless pitch motion time histories of Wigley Ⅰ hull when λ/L is 1.50
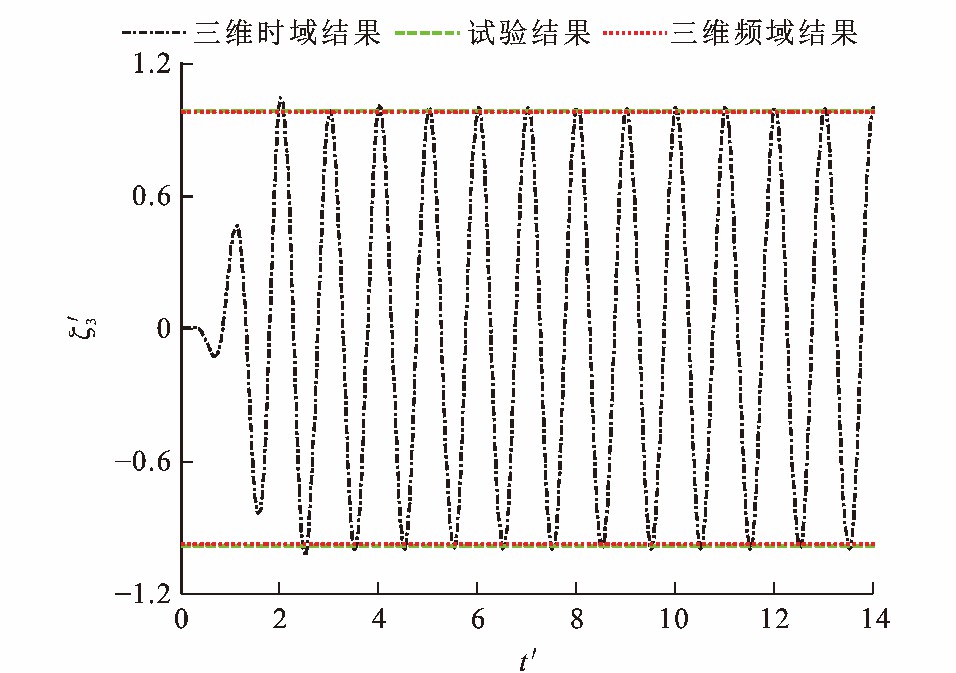
图 21 λ/L为2.0时Wigley Ⅰ型船舶量纲一垂荡运动时间历程
Figure 21. Dimensionless heave motion time histories of Wigley Ⅰ hull when λ/L is 2.0
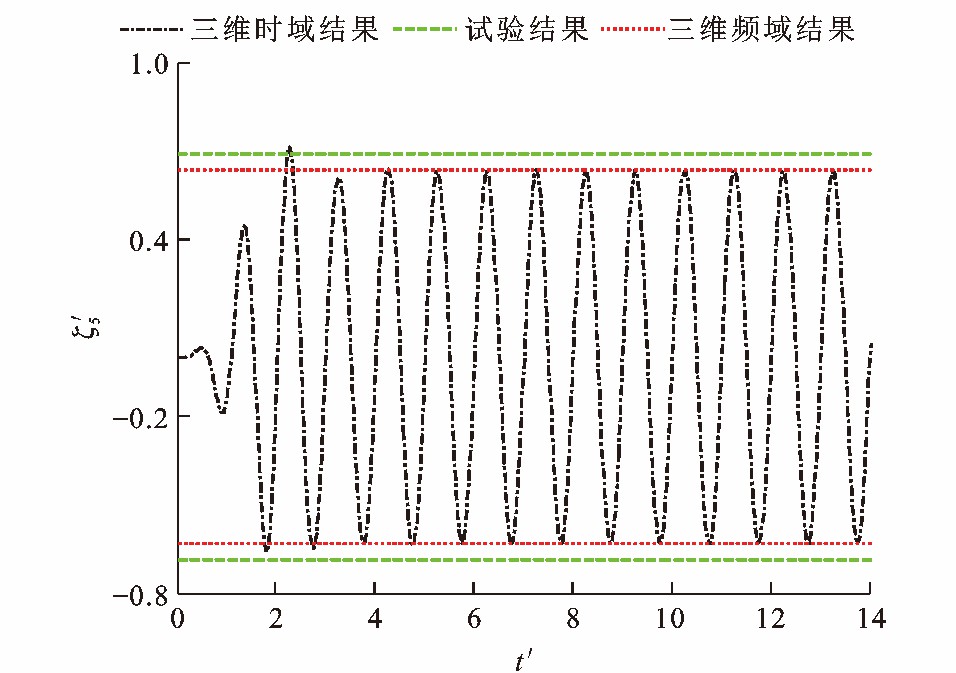
图 22 λ/L为2.0时Wigley Ⅰ型船舶量纲一纵摇运动时间历程
Figure 22. Dimensionless pitch motion time histories of Wigley Ⅰ hull when λ/L is 2.0
表 1 不同方法计算所得f (0, β) 的相对误差
Table 1. Relative errors of f (0, β) calculated by different methods
计算方法 β取值不同时各方法计算结果与解析解的相对误差 2.53 6.26 9.15 12.48 4阶Runge-Kutta法 3.0×10-5 2.9×10-2 -2.5×10-2 6.8×10-3 精细积分法 1.3×10-16 4.7×10-14 6.3×10-15 -5.1×10-14  下载: 导出CSV
下载: 导出CSV
表 2 Wigley Ⅰ型船舶与S60型船舶的参数
Table 2. Parameters of Wigley Ⅰand S60 hulls
船型 船长L/m 船宽/m 吃水/m 排水量/m3 纵摇惯性半径 重心距离基线距离/m 方形系数 Wigley Ⅰ 3 0.3 0.187 5 0.094 6 0.25L 0.17 0.56 S60 140 20 8 15 680 0.25L 8 0.70
下载: 导出CSV
-
[1] 金一丞, 尹勇. 公约、技术与航海模拟器的发展[J]. 中国航海, 2010, 33 (1): 1-6. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGHH201001002.htmJIN Yi-cheng, YIN Yong. Maritime simulators: convention and technology[J]. Navigation of China, 2010, 33 (1): 1-6. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGHH201001002.htm [2] 钱小斌, 尹勇, 张秀凤, 等. 海上不规则波浪扰动对船舶运动的影响[J]. 交通运输工程学报, 2016, 16 (3): 116-124. doi: 10.3969/j.issn.1671-1637.2016.03.014QIAN Xiao-bin, YIN Yong, ZHANG Xiu-feng, et al. Influence of irregular disturbance of sea wave on ship motions[J]. Journal of Traffic and Transportation Engineering, 2016, 16 (3): 116-124. (in Chinese). doi: 10.3969/j.issn.1671-1637.2016.03.014 [3] 侯圣贤. 迎浪航行时船舶垂荡纵摇运动建模与仿真[D]. 大连: 大连海事大学, 2015.HOU Sheng-xian. Simulation on ship heave and pitch motions in head seas[D]. Dalian: Dalian Maritime University, 2015. (in Chinese). [4] SALVENSEN N, TUCK E O, FALTINSEN O. Ship motions and sea loads[J]. Transactions Society of Naval Architects and Marine Engineers, 1970, 78: 250-287. [5] 洪亮, 朱仁传, 缪国平, 等. 三维频域有航速格林函数的数值计算与分析[J]. 水动力学研究与进展, 2013, 28 (4): 423-430. https://www.cnki.com.cn/Article/CJFDTOTAL-SDLJ201304009.htmHONG Liang, ZHU Ren-chuan, MIAO Guo-ping, et al. Numerical calculation and analysis of 3-D Green's function with forward speed in frequency domain[J]. Chinese Journal of Hydrodynamics, 2013, 28 (4): 423-430. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-SDLJ201304009.htm [6] 邹元杰, 段文洋, 任慧龙, 等. 船舶在波浪中脉动压力预报的三维方法[J]. 哈尔滨工程大学学报, 2002, 23 (1): 20-25. doi: 10.3969/j.issn.1006-7043.2002.01.005ZOU Yuan-jie, DUAN Wen-yang, REN Hui-long, et al. Three-dimensional method for prediction of oscillating pressure on ship in waves[J]. Journal of Harbin Engineering University, 2002, 23 (1): 20-25. (in Chinese). doi: 10.3969/j.issn.1006-7043.2002.01.005 [7] GUEVEL P, BOUGIS J. Ship-motions with forward speed in infinite depth[J]. International Shipbuilding Progress, 1982, 29: 103-117. doi: 10.3233/ISP-1982-2933202 [8] 周正全, 顾懋祥, 孙伯起, 等. 预报船舶在波浪中航行时相对运动的三维模型[J]. 中国造船, 1992 (2): 1-10. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGZC199202000.htmZHOU Zheng-quan, GU Mao-xiang, SUN Bai-qi, et al. Predictions of relative motions of ships in regular waves[J]. Shipbuilding of China, 1992 (2): 1-10. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGZC199202000.htm [9] LIAPIS S J. Time-domain analysis of ship motions[D]. Ann Arbor: The University of Michigan, 1986. [10] SUN Wei, REN Hui-long, LI Hui, et al. Numerical solution for ship with forward speed based on transient Green function method[J]. Journal of Ship Mechanics, 2014, 18 (12): 1444-1452. [11] KING B K. Time domain analysis of wave exciting forces on ships and bodies[D]. Ann Arbor: The University of Michigan, 1987. [12] KORSMEYER F T, BINGHAM H B. The forward speed diffraction problem[J]. Journal of Ship Research, 1998, 42 (2): 99-112. doi: 10.5957/jsr.1998.42.2.99 [13] SINGH S P, SEN D. A comparative linear and nonlinear ship motion study using 3-D time domain methods[J]. Ocean Engineering, 2007, 34 (13): 1863-1881. doi: 10.1016/j.oceaneng.2006.10.016 [14] SINGH S P, SEN D. A comparative study on 3D wave load and pressure computations for different level of modelling of nonlinearities[J]. Marine Structures, 2007, 20 (1/2): 1-24. [15] DATTA R, RODRIGUES J M, SOARES C G. Study of the motions of fishing vessels by a time domain panel method[J]. Ocean Engineering, 2011, 38 (5/6): 782-792. [16] 孙葳, 任慧龙. 时域格林函数法求解有航速船舶运动问题[J]. 水动力学研究与进展, 2018, 33 (2): 216-222. https://www.cnki.com.cn/Article/CJFDTOTAL-SDLJ201802010.htmSUN Wei, REN Hui-long. Ship motions with forward speed by time-domain Green function method[J]. Chinese Journal of Hydrodynamics, 2018, 33 (2): 216-222. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-SDLJ201802010.htm [17] NEWMAN J N. The approximation of free-surface Green functions[M]//Cambridge University Press. Wave Asymptotic. Cambridge: Cambridge University Press, 1992: 108-135. [18] 黄德波. 时域Green函数及其导数的数值计算[J]. 中国造船, 1992 (1): 16-25. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGZC199204001.htmHUANG De-bo. Approximation of time-domain free surface function and its spatial derivatives[J]. Shipbuilding of China, 1992 (1): 16-25. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGZC199204001.htm [19] CHUANG J M, QIU W, PENG H. On the evaluation of time-domain Green function[J]. Ocean Engineering, 2007, 34 (7): 962-969. doi: 10.1016/j.oceaneng.2006.05.010 [20] CLEMENT A H. An ordinary differential equation for the Green function of time-domain free-surface hydrodynamics[J]. Journal of Engineering Mathematics, 1998, 33 (2): 201-217. doi: 10.1023/A:1004376504969 [21] BINGHAM H B. A note on the relative efficiency of methods for computing the transient free-surface Green function[J]. Ocean Engineering, 2016, 120: 15-20. doi: 10.1016/j.oceaneng.2016.05.020 [22] DUAN Wen-yang, DAI Yi-shan. New derivation of ordinary differential equations for transient free-surface Green functions[J]. China Ocean Engineering, 2001, 15 (4): 499-507. [23] LI Zhi-fu, REN Hui-long, TONG Xiao-wang, et al. A precise computation method of transient free surface Green function[J]. Ocean Engineering, 2015, 105: 318-326. doi: 10.1016/j.oceaneng.2015.06.048 [24] 钟万勰. 结构动力方程的精细时程积分法[J]. 大连理工大学学报, 1994, 34 (2): 131-136. https://www.cnki.com.cn/Article/CJFDTOTAL-DLLG199402003.htmZHONG Wan-xie. On precise time-integration method for structural dynamics[J]. Journal of Dalian University of Technology, 1994, 34 (2): 131-136. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DLLG199402003.htm [25] 申亮, 朱仁传, 缪国平, 等. 深水时域格林函数的实用数值计算[J]. 水动力学研究与进展, 2007, 22 (3): 380-386. doi: 10.3969/j.issn.1000-4874.2007.03.017SHEN Liang, ZHU Ren-chuan, MIAO Guo-ping, et al. A practical numerical method for deep water time-domain Green function[J]. Chinese Journal of Hydrodynamics, 2007, 22 (3): 380-386. (in Chinese). doi: 10.3969/j.issn.1000-4874.2007.03.017 [26] 昝英飞, 马悦生, 韩端锋, 等. 基于辨识理论的船舶时域运动快速计算[J]. 交通运输工程学报, 2018, 18 (4): 182-190. doi: 10.3969/j.issn.1671-1637.2018.04.019ZAN Ying-fei, MA Yue-sheng, HAN Duan-feng, et al. Fast computation of vessel time-domain motion based on identification theory[J]. Journal of Traffic and Transportation Engineering, 2018, 18 (4): 182-190. (in Chinese). doi: 10.3969/j.issn.1671-1637.2018.04.019 [27] 张腾, 任俊生, 李志富, 等. 时域格林函数的新实用数值计算方法[J]. 大连海事大学学报, 2018, 44 (1): 1-8. https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS201801001.htmZHANG Teng, REN Jun-sheng, LI Zhi-fu, et al. A new and practical numerical calculation method for time-domain Green function[J]. Journal of Dalian Maritime University, 2018, 44 (1): 1-8. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS201801001.htm [28] HESS J L, SMITH A M O. Calculation of non-lifting potential flow about arbitrary three-dimensional bodies[J]. Journal of Ship Research, 1964, 8 (2): 22-44. [29] MAGEE A R. Large amplitude ship motions in the time domain[D]. Ann Arbor: The University of Michigan, 1991. [30] JOURNÉE J M J. Experiments and calculations on 4 Wigley hull forms in head waves[R]. Delft: Delft University of Technology, 1992. [31] KARA F. Time domain hydrodynamic and hydroelastic analysis of floating bodies with forward speed[D]. Glasgow: University of Strathclyde, 2000. 期刊类型引用(10)
1. 朱曼,文元桥,孙吴强,雷涛. 一种基于扩展状态观测器的智能船舶Nomoto模型参数辨识方法. 中国舰船研究. 2023(03): 75-85 .  百度学术
百度学术2. 赵照,张会霞,肖声浩. 集装箱船运动和控制数学模型的建模研究. 今日制造与升级. 2023(05): 8-10+149 . 百度学术3. 李馥颖,蒋强. 基于信息图形化的网页界面视觉均衡优化仿真. 计算机仿真. 2023(07): 195-199 . 百度学术4. 赵翔,谢非. 梁的强迫振动问题Green函数解及应用研究综述. 动力学与控制学报. 2023(10): 5-17 . 百度学术5. 王开源,臧照良. 基于ProE曲面建模的三维船体造型设计. 舰船科学技术. 2022(04): 25-28 . 百度学术6. 张秀凤,王晓雪,孟耀,尹勇. 船舶运动建模与仿真研究进展及未来发展趋势. 大连海事大学学报. 2021(01): 1-8 . 百度学术7. 闫春娟. 基于非线性数学模型的舰船运动特性分析. 舰船科学技术. 2021(08): 1-3 . 百度学术8. 李兆斌. 船舶故障发生概率的数学模型构建及研究. 舰船科学技术. 2021(12): 43-45 . 百度学术9. 吴海鹏,刘寅东. STF切片理论的实用数值计算方法改进. 大连海事大学学报. 2020(01): 10-19 . 百度学术10. 张腾,任俊生,梅天龙. 基于傅汝德-克雷洛夫力非线性法的规则波浪中船舶运动数学模型. 交通运输工程学报. 2020(02): 77-87 .  本站查看
本站查看其他类型引用(9)
-


 下载:
下载:























 百度学术
百度学术 点击查看大图
点击查看大图
计量
- 文章访问数: 1273
- HTML全文浏览量: 385
- PDF下载量: 322
- 被引次数: 19
