

Measurement method of reference points of railway fixed pile based on monocular vision
Article Text (Baidu Translation)
-
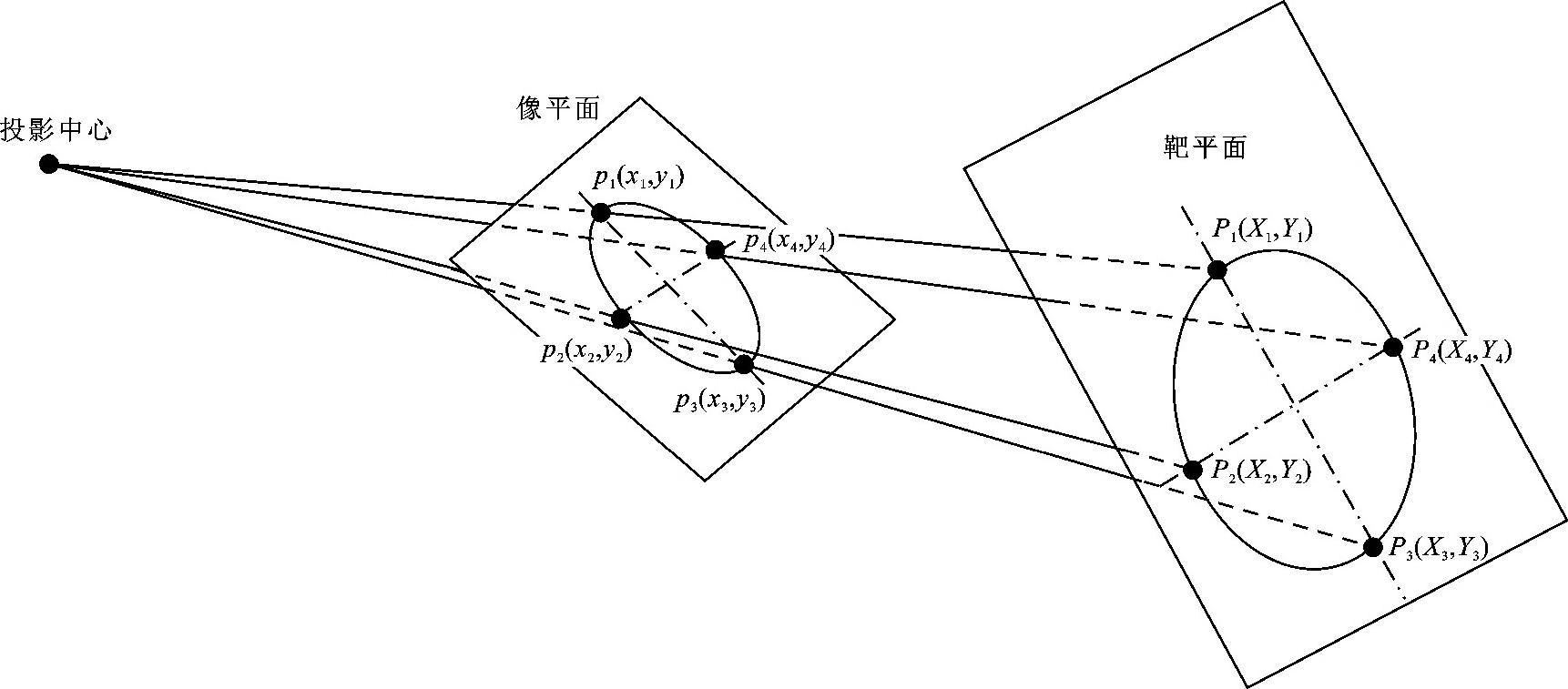
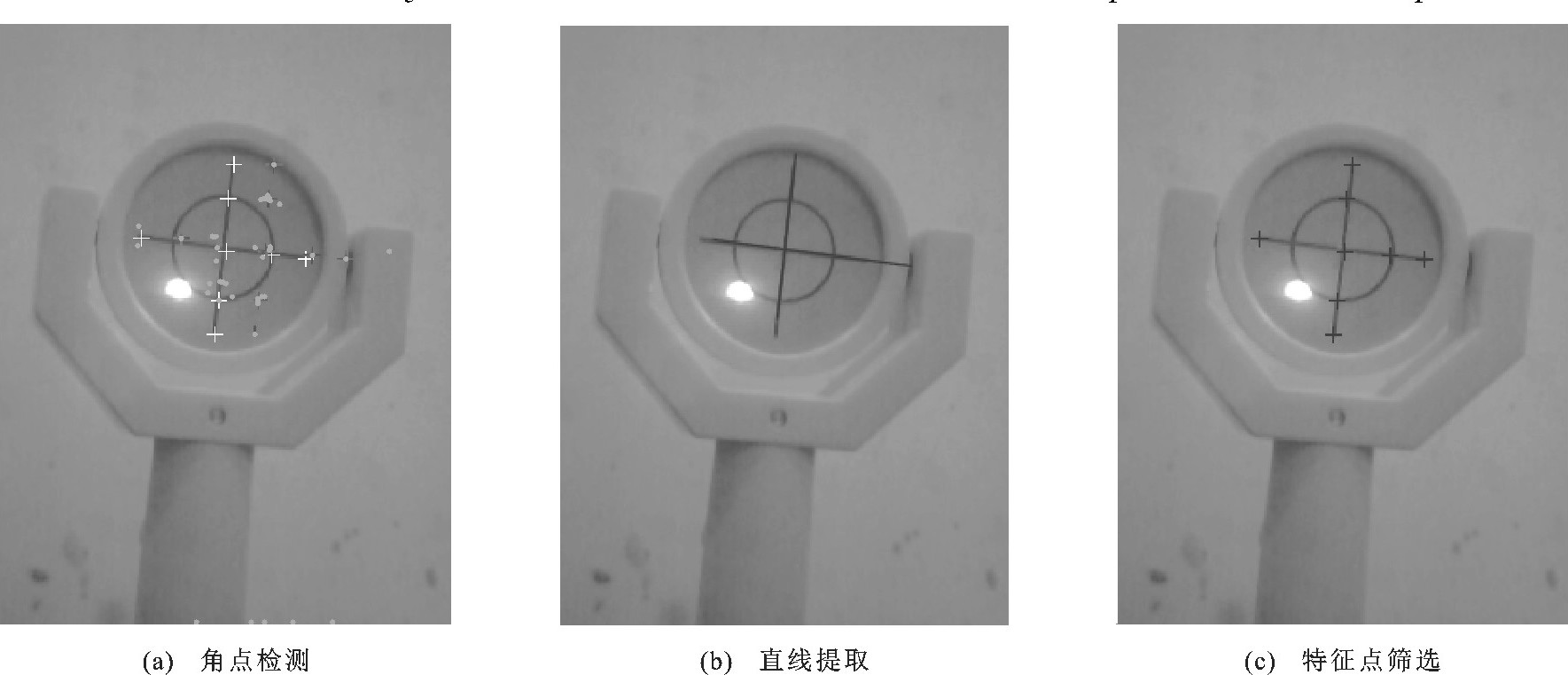
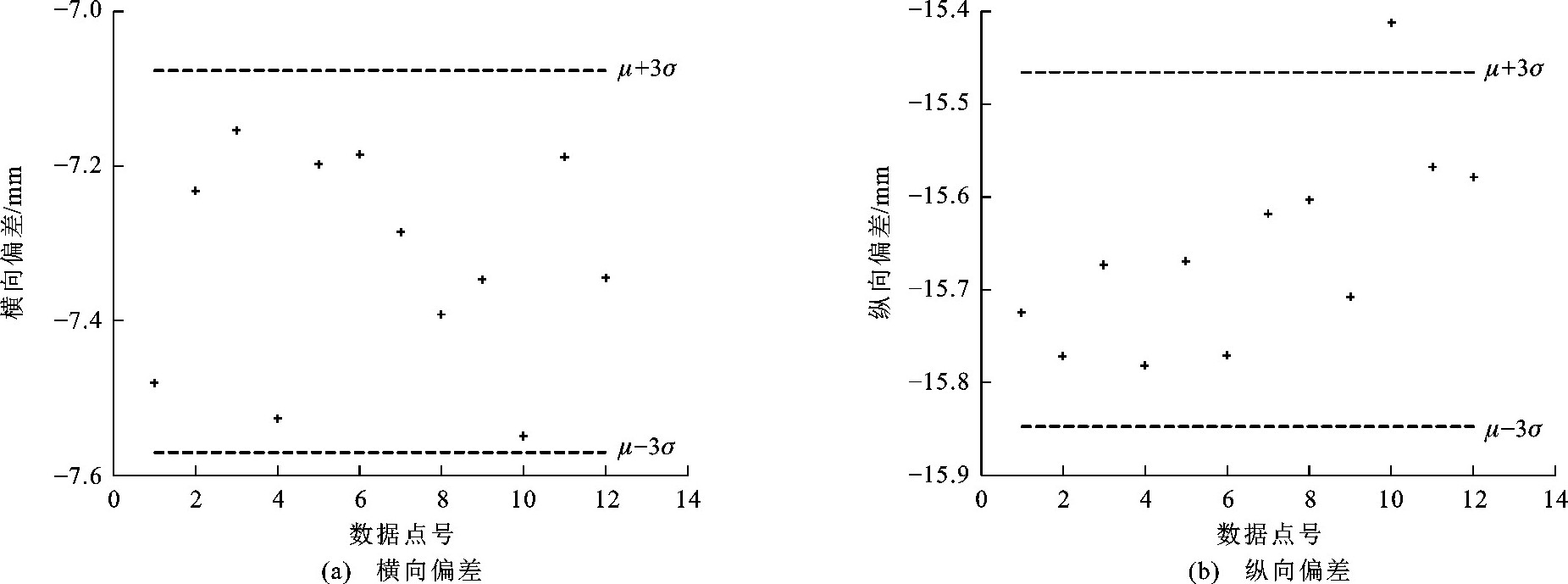
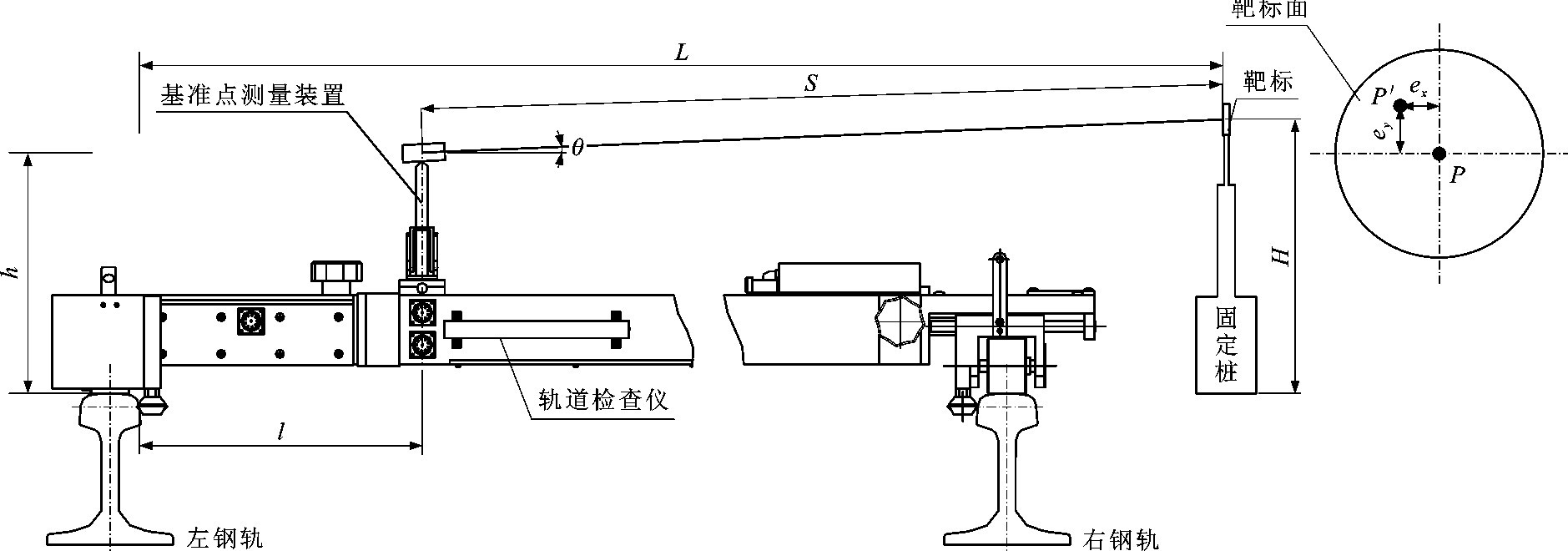
摘要: 为了提高铁路线路固定桩基准点绝对坐标测量的效率, 提出了一种新的测量方法; 建立了无合作目标的单点测量模型, 采用单目相机采集激光靶标图像, 利用光饱和点重心法提取激光光斑中心; 研究了平面直线成像规律, 构造了基于正交直线的单应性矩阵求解方法, 并对图像进行透视畸变校正; 根据校正后的图像与靶标的几何相似关系, 计算了激光光斑与靶标的横、纵向偏差; 在室内环境下, 进行了靶标图片拍摄的正交试验, 计算与比较了横、纵向偏差。试验结果表明: 在激光光斑和靶标固定的条件下, 保持相机与靶标的距离不变, 改变相机角度拍摄图片, 经过透视变换校正后, 横、纵向偏差与期望偏差分别为0.082、0.254mm; 相机拍摄角度固定, 改变相机与靶标距离拍摄图片, 经过透视变换校正后, 横、纵向偏差与期望偏差分别为0.126、0.014mm; 在相机的角度、相机与靶标的距离都改变的情况下, 拍摄的图片经过透视变换校正后, 横、纵向偏差与期望偏差分别为0.329、0.064mm; 可见3组试验的横、纵向偏差与期望偏差的误差均小于0.5mm; 系统的水平距离测量误差范围为±1.52mm, 高程测量误差范围为±0.67mm, 根据轨道检查仪性能指标, 线路水平距离误差范围为±3.0mm, 高程误差范围为±2.5mm, 因此, 本文的测量方法精度满足轨道测量要求。水平距离测量误差完全由激光测距仪和倾角传感器决定, 而高程测量误差是由激光测距仪、倾角传感器与激光点和靶心的偏移量共同决定的。Abstract: To improve the efficiency of absolute coordinates measurement of railway line fixed pile reference points, a new measurement method was proposed.The single-point measurement model of non-cooperative target was established.The laser target images were captured by monocular camera, the centroid method of saturation point was applied to exact laser spot center.The imaging rules of lines in plane were studied.A homography matrix solving method was constructed based on the orthogonal straight lines, and the image was corrected by perspective distortion.Then the horizontal and vertical offsets of laser spot and target were calculated based on the geometric similarity relationship between corrected image and target.In the indoor environment, orthogonal experiments of target image shooting were carried out. The horizontal and vertical offsets were calculated and compared.Experimental result shows that under the condition that laser spot and target are fixed, the distance from camera to target is constant, and the camera's angle is only variable, after the images are shot and corrected by perspective transformation, the errors between the horizontal and vertical offsets and the expected values are 0.082 and 0.254 mm, respectively.Under keeping the camera's angle and changing the distance from camera to target, the errors of corrected images are 0.126 and 0.014 mm, respectively.When the camera's angle and the distance from camera to target both change, the errors of corrected images are 0.329 and 0.064 mm, respectively.The errors between the horizontal and vertical offsets and the expected values of 3 tests are less than 0.5 mm.The range of horizontal and height measure errors of the system are ±1.52 and ±0.67 mm, respectively.According to the index of railway inspection tester's performance, the horizontal measure errors of railway are within ±3.0 mm and the height measure errors are within ±2.5 mm.Obviously, the precision of the measurement method can meet the railway measurement requirements.The horizontal distance measure error is totally depended on the laser range finder and tilt sensor, while the height measure error is depended on the laser range finder, tilt sensor and the offsets of laser spot to the target.8 figs, 26 refs.
-
[1] 任轶南. 基于现代检测技术的高速铁路曲线状态评价与整正方法[D]. 成都: 西南交通大学, 2014.REN Yi-nan. Based on evaluation of the state of modem highspeed rail curve detection technology and correction methods[D]. Chengdu: Southwest Jiaotong University, 2014. (in Chinese). [2] 姚连璧, 孙海丽, 王璇, 等. 基于激光跟踪仪的轨道静态平顺性检测系统[J]. 同济大学学报: 自然科学版, 2016, 44 (8): 1260-1265. https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ201608018.htmYAO Lian-bi, SUN Hai-li, WANG Xuan, et al. Detecting system of track static regularities based on the laser tracker[J]. Journal of Tongji University: Natural Science, 2016, 44 (8): 1260-1265. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ201608018.htm [3] 朱洪涛, 徐宜敏, 吴维军. 全站仪免置平自由设站及其测量方法[J]. 铁道标准设计, 2013 (6): 25-28. https://www.cnki.com.cn/Article/CJFDTOTAL-TDBS201306008.htmZHU Hong-tao, XU Yi-min, WU Wei-jun. Free stationing and its surveying method for electronic total station without manual leveling[J]. Railway Standard Design, 2013 (6): 25-28. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-TDBS201306008.htm [4] IOANNOU D, HUDA W, LAINE A F. Circle recognition through a 2D Hough Transform and radius histogramming[J]. Image and Vision Computing, 1999, 17 (1): 15-26. doi: 10.1016/S0262-8856(98)00090-0 [5] 闵永智, 康飞, 党建武, 等. 无砟轨道沉降监测系统光斑中心定位技术研究[J]. 铁道学报, 2014, 36 (2): 81-85. doi: 10.3969/j.issn.1001-8360.2014.02.013MIN Yong-zhi, KANG Fei, DANG Jian-wu, et al. Technology of light spot center positioning of ballastless track settlement monitoring system[J]. Journal of the China Railway Society, 2014, 36 (2): 81-85. (in Chinese). doi: 10.3969/j.issn.1001-8360.2014.02.013 [6] 王会峰, 汪大宝, 刘上乾. 激光靶标图像识别和测量方法研究[J]. 激光与红外, 2007, 37 (6): 564-566, 574. doi: 10.3969/j.issn.1001-5078.2007.06.023WANG Hui-feng, WANG Da-bao, LIU Shang-qian. Research on auto identify and measurement approach of laser target image[J]. Laser and Infrared, 2007, 37 (6): 564-566, 574. (in Chinese). doi: 10.3969/j.issn.1001-5078.2007.06.023 [7] 孔兵, 王昭, 谭玉山. 基于圆拟合的激光光斑中心检测算法[J]. 红外与激光工程, 2002, 31 (3): 275-279. doi: 10.3969/j.issn.1007-2276.2002.03.020KONG Bing, WANG Zhao, TAN Yu-shan. Algorithm of laser spot detection based on circle fitting[J]. Infrared and Laser Engineering, 2002, 31 (3): 275-279. (in Chinese). doi: 10.3969/j.issn.1007-2276.2002.03.020 [8] 章秀华, 杨坤涛. 一种改进的二维Hough变换提取激光光斑参数方法[J]. 激光与红外, 2006, 36 (10): 995-997. doi: 10.3969/j.issn.1001-5078.2006.10.023ZHANG Xiu-hua, YANG Kun-tao. An improved 2D Hough transform method for extracting laser spot parameter[J]. Laser and Infrared, 2006, 36 (10): 995-997. (in Chinese). doi: 10.3969/j.issn.1001-5078.2006.10.023 [9] 王丽丽, 胡中文, 季杭馨. 基于高斯拟合的激光光斑中心定位算法[J]. 应用光学, 2012, 33 (5): 985-990. https://www.cnki.com.cn/Article/CJFDTOTAL-YYGX201205033.htmWANG Li-li, HU Zhong-wen, JI Hang-xin. Laser spot center location algorithm based on Gaussian fitting[J]. Journal of Applied Optics, 2012, 33 (5): 985-990. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YYGX201205033.htm [10] FAN Yi-yan, ZHAO Bin. Combined non-contact coordinate measurement system and calibration method[J]. Optics and Laser Technology, 2015, 70: 100-105. doi: 10.1016/j.optlastec.2015.01.001 [11] ARULMOZHI K, ARUMUGA PERUMAL S, THANOOJA PRIYADARSINI C S, et al. Image refinement using skew angle detection and correction for Indian license plates[C]//IEEE. 2012IEEE International Conference on Computational Intelligence and Computing Research. New York: IEEE, 2012: 1-4. [12] GONG Li-xia, HU Hong-ping, BAI Yan-ping. Vehicle license plate slant correction based on mathematical morphology and Radon transformation[C]//IEEE. 6th International Conference on Natural Computation. New York: IEEE, 2010: 3457-3461. [13] 刘慧娟. 快速响应码图像的全方位识别[J]. 仪器仪表学报, 2006, 27 (4): 376-379, 388. doi: 10.3321/j.issn:0254-3087.2006.04.011LIU Hui-juan. Omnidirectional recognition of quick response code image[J]. Chinese Journal of Scientific Instrument, 2006, 27 (4): 376-379, 388. (in Chinese). doi: 10.3321/j.issn:0254-3087.2006.04.011 [14] SEEDAHMED G H. Direct retrieval of exterior orientation parameters using a 2D projective transformation[J]. Photogrammetric Record, 2006, 21 (115): 211-231. doi: 10.1111/j.1477-9730.2006.00381.x [15] SHAN Jian, SHI Yuan-yuan, LIU Jia, et al. Comparative study of linear feature transformation techniques for mandarin digit string recognition[C]//ISCA Archive. The 2th International Symposium on Chinese Spoken Language Processing. Hong Kong: SIG-CSLP, 2002: 1-4. [16] EL-ASHMAWY K L A. A comparison study between collinearity condition, coplanarity condition, and direct linear transformation (DLT) method for camera exterior orientation parameters determination[J]. Geodesy and Cartography, 2015, 41 (2): 66-73. doi: 10.3846/20296991.2015.1051335 [17] LONGUET-HIGGINS H C. A computer algorithm for reconstructing a scene from two projections[J]. Nature, 1981, 293: 133-135. doi: 10.1038/293133a0 [18] HARRIS C, STEPHENS M. A combined corner and edge detector[C]//TAYLOR C J. Proceedings of the 4th Alvey Vision Conference. Manchester: AVC, 1988: 147-151. [19] SMITH S M, BRADY J M. SUSAN-a new approach to low level image processing[J]. International Journal of Computer Vision, 1997, 23 (1): 45-78. doi: 10.1023/A:1007963824710 [20] LOWE D G. Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004, 60 (2): 91-110. doi: 10.1023/B:VISI.0000029664.99615.94 [21] BAY H, TUYTELAARS T, VAN GOOL L. SURF: speeded up robust features[J]. Lecture Notes in Computer Science, 2006, 3951: 404-417. [22] TOLA E, LEPETIT V, FUA P. DAISY: an efficient dense descriptor applied to wide-baseline stereo[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32 (5): 815-830. doi: 10.1109/TPAMI.2009.77 [23] 袁春兰, 熊宗龙, 周雪花, 等. 基于Sobel算子的图像边缘检测研究[J]. 激光与红外, 2009, 39 (1): 85-87. doi: 10.3969/j.issn.1001-5078.2009.01.023YUAN Chun-lan, XIONG Zong-long, ZHOU Xue-hua, et al. Study of infrared image edge detection based on Sobel operator[J]. Laser and Infrared, 2009, 39 (1): 85-87. (in Chinese). doi: 10.3969/j.issn.1001-5078.2009.01.023 [24] MIKOLAJCZYK K, SCHMID C. Scale and affine invariant interest point detectors[J]. International Journal of Computer Vision, 2004, 60 (1): 63-86. doi: 10.1023/B:VISI.0000027790.02288.f2 [25] 柳晨光, 初秀民, 谢朔, 等. 基于单目视觉的水面船舶多目标定位方法[J]. 交通运输工程学报, 2015, 15 (5): 91-100. doi: 10.3969/j.issn.1671-1637.2015.05.012LIU Chen-guang, CHU Xiu-min, XIE Shuo, et al. Multitarget locating method of surface ship based on monocular vision[J]. Journal of Traffic and Transportation Engineering, 2015, 15 (5): 91-100. (in Chinese). doi: 10.3969/j.issn.1671-1637.2015.05.012 [26] LU Ping-ping, LIU Qing, GUO Jian-ming. Camera calibration implementation based on Zhang Zhengyou plane method[J]. Lecture Notes in Electrical Engineering, 2016, 359: 29-40. -

 下载:
下载:




图(8)
计量
- 文章访问数: 835
- HTML全文浏览量: 177
- PDF下载量: 417
- 被引次数: 0
