

-
摘要: 基于电磁悬浮型中低速磁浮列车的工作原理,阐述了中低速磁浮各核心子系统(悬浮导向系统、牵引电机、走行机构、制动系统、轨道-桥梁结构等)的技术特征,综合分析了各子系统存在的技术问题和解决方案;梳理了日本Linimo列车、韩国EcoBee列车、长沙磁浮快线、北京磁浮S1线和西南交通大学自主研发的(悬挂)中置式磁浮列车的发展历程及技术特点,总结了中低速磁浮列车的技术重点和难点。研究结果表明:车-轨耦合振动应综合考虑悬浮控制、车辆结构参数、桥梁结构参数、空气动力效应、直线电机等因素的影响,建立完备的车-轨耦合振动研究模型;悬浮冗余匮乏可综合利用机械冗余和电气冗余的技术特点,对中低速磁浮的冗余设计方案进行改进;磁浮靴轨受流应与地铁靴轨受流区分,充分考虑磁浮列车的耦合作用特性,探索无缝供电轨技术在中低速磁浮中的工程实用性;悬浮控制由于控制器主频较低,程序运行周期过长,应提高控制算法和悬浮系统故障诊断技术的精确性和稳定性;车辆轻量化设计应在保证结构强度的基础上,综合考虑车体、走行机构等多因素的结构特点,以提高中低速磁浮列车运载能力;应综合不同磁浮线路要求,建立统一的线路标准,提高中低速磁浮工程化应用能力。Abstract: Based on the working principle of electro-magnetic suspension (EMS) type medium and low speed maglev (MLSM) train, the technical characteristics of each core subsystem (levitation-guidance system, traction motor, running gear, braking system and track-bridge structure, etc.) of MLSM train were described, and the technical problems and solutions of each subsystem were comprehensively analyzed. The development histories and technical characteristics of Linimo train in Japan, EcoBee train in Korea, maglev express in Changsha, maglev line S1 in Beijing as well as the self-developed MLSM train with mid-set suspension of Southwest Jiaotong University were summarized, and also the technical key points and difficulties of MLSM train. Research results show that, for the vehicle-guideway coupling vibration, a complete vehicle-guideway coupling vibration research model should be established considering the influences of levitation control, structural parameters of vehicle and bridge, aerodynamic effect, linear induction motor and other factors. For the lack of suspension redundancy, the redundancy design scheme of MLSM should be improved by comprehensively utilizing the characteristics of mechanical redundancy and electrical redundancy. For the boots-rail current collection, the current collection relationship of maglev boots-rail should be distinguished from metro boots-rail, the coupling characteristics of maglev train are fully considered, and the engineering practicability of seamless power rail technology in MLSM is explored. For the levitation control, the accuracy and stability of control algorithm and levitation system fault diagnosis technology should be improved due to the low dominant frequency of controller and long running cycle of program. For the light-weight design of vehicle, the structural characteristics of vehicle, running gear and other factors should be comprehensively considered on the basis of ensuring the structural strength, so as to improve the MLSM train carrying capacity. In addition, a unified track standard should be established based on different maglev line requirements, so as to improve the engineering application ability of MLSM. 7 tabs, 12 figs, 97 refs.
-

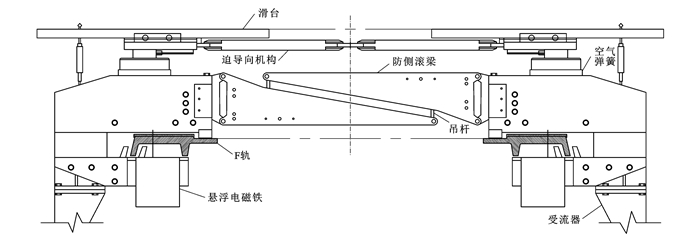
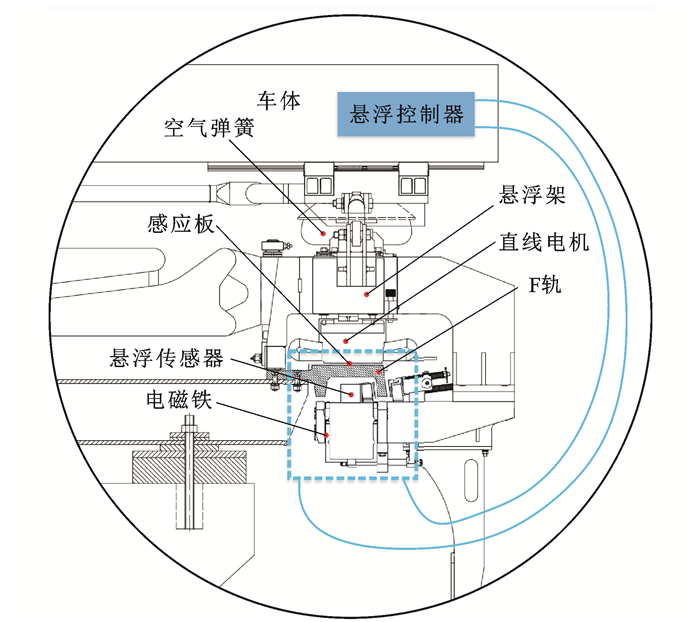
图 1 中低速磁浮车辆悬浮与导向系统断面
Figure 1. Cross section of levitation-guidance system of medium and low speed maglev vehicle

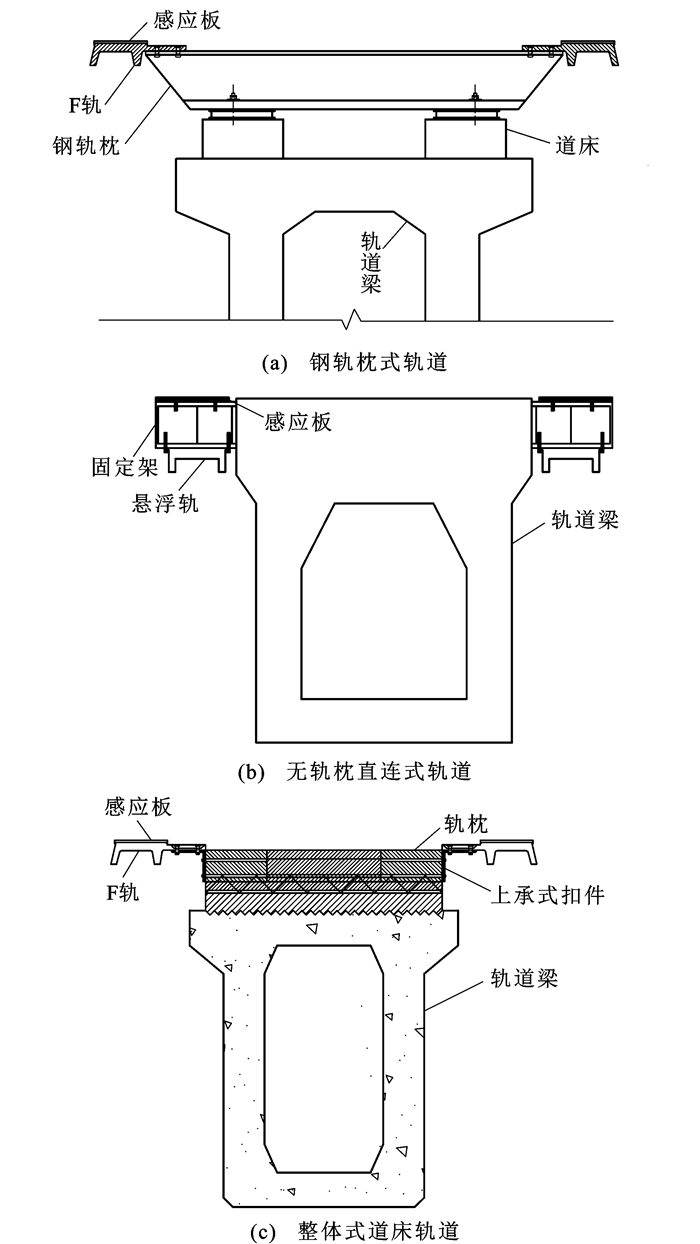
图 6 中低速磁浮轨道-桥梁结构断面
Figure 6. Structure sections of track-bridge of medium and low speed maglev

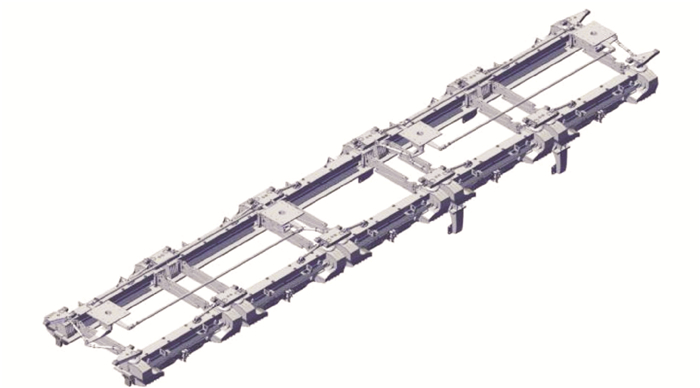
图 11 (悬挂)中置式磁浮工程试验车
Figure 11. Maglev engineering test vehicle of (suspension) mid-set

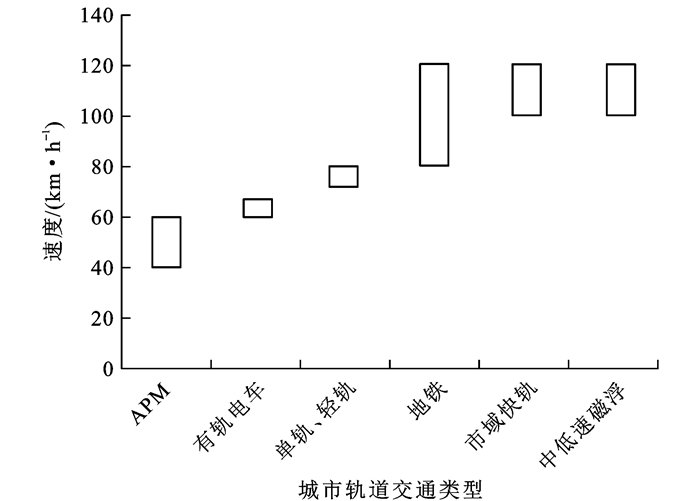
图 12 城市轨道交通各制式最高运行速度域
Figure 12. Maximum operating speed ranges of different modes of urban rail transit
表 1 各国中低速磁浮走行机构基本特点
Table 1. Basic characteristics of medium and low speed maglev running gears in various countries
参数 日本
Linimo列车韩国
EcoBee列车中国 长沙磁浮线 北京磁浮S1线 (悬挂)中置式 单节车悬浮架数 5 4 5 5 3~6 悬浮架结构形式 “口”字型 “口”字型 “口”字型 “口”字型 “工”字型 设计最高运行速度/(km·h-1) 100 110 110 110 160~200 驱动方式 LIM LIM LIM LIM LIM 轨距/mm 1 700 1 850 1 860 2 000 1 900  下载: 导出CSV
下载: 导出CSV
表 2 简支梁关键设计参数限值
Table 2. Limit values of key design parameters of simply supported beams
现有磁浮线路规范 挠跨比限值 垂向基频最低限值 动力系数限值 长沙磁浮线 L/4 600 90/ L 1.15 北京磁浮S1线 L/3 800 唐山中低速磁浮试验线 L/3 800 64/ L 韩国UTM磁浮系统 L/4 000 日本HSST磁浮系统 L/1 500(20 < L≤25) 63/ L 1.1/1.2(钢梁)
下载: 导出CSV
表 3 不同车辆质量和速度作用下跨中动力系数
Table 3. Dynamic coefficients of midspan under different vehicle masses and speeds
车体质量/t 速度/(km·h-1) 10 20 30 40 50 60 70 80 25 1.030 1.033 1.036 1.037 1.040 1.041 1.047 1.061 30 1.031 1.036 1.045 1.053 1.053 1.066 1.071 1.075 35 1.035 1.040 1.049 1.057 1.057 1.068 1.073 1.076
下载: 导出CSV
表 4 日本Linimo列车主要性能参数
Table 4. Main performance parameters of Linimo train in Japan
最高运行速度/(km·h-1) 最大爬坡能力/‰ 最大加速度/(m·s-2) 常用制动最大减速度/(m·s-2) 最小通过曲线半径/m 编组 单节车载客量/人 100 70 1.11 1.25 50 3 82
下载: 导出CSV
表 5 韩国EcoBee列车主要性能参数
Table 5. Main performance parameters of EcoBee train in Korea
最高运行速度/(km·h-1) 最大爬坡能力/‰ 最大加速度/(m·s-2) 常用制动最大减速度/(m·s-2) 最小通过曲线半径/m 编组 单节车载客量/人 110 70 1.11 1.25 50 2 115
下载: 导出CSV
表 6 长沙磁浮线列车主要性能参数
Table 6. Main performance parameters of Changsha maglev line train
最高运行速度/(km·h-1) 最大爬坡能力/‰ 最大加速度/(m·s-2) 常用制动最大减速度/(m·s-2) 最小通过曲线半径/m 编组 单节车载客量/人 110 70 1.1 1.1 50 3 121
下载: 导出CSV
表 7 北京磁浮S1线列车主要性能参数
Table 7. Main performance parameters of Beijing maglev line S1 train
设计最高速度/(km·h-1) 最大爬坡能力/‰ 最大加速度/(m·s-2) 常用制动最大减速度/(m·s-2) 最小通过曲线半径/m 编组 单节车载客量/人 110 70 1.1 1.1 50 6 168
下载: 导出CSV
-
[1] 翟婉明, 赵春发. 现代轨道交通工程科技前沿与挑战[J]. 西南交通大学学报, 2016, 51(2): 209-226. doi: 10.3969/j.issn.0258-2724.2016.02.001ZHAI Wan-ming, ZHAO Chun-fa. Frontiers and challenges of sciences and technologies in modern railway engineering[J]. Journal of Southwest Jiaotong University, 2016, 51(2): 209-226. (in Chinese) doi: 10.3969/j.issn.0258-2724.2016.02.001 [2] 中国城市轨道交通协会. 城市轨道交通2019年度统计和分析报告[R]. 北京: 中国城市轨道交通协会, 2020.China Association of Metros. Statistics and analysis report of urban rail transit in 2019[R]. Beijing: China Association of Metros, 2020. (in Chinese) [3] LEE H W, KIM K C, JU L. Review of maglev train technologies[J]. IEEE Transactions on Magnetics, 2006, 42(7): 1917-1925. doi: 10.1109/TMAG.2006.875842 [4] 徐飞, 罗世辉, 邓自刚. 磁悬浮轨道交通关键技术及全速度域应用研究[J]. 铁道学报, 2019, 41(3): 40-49. doi: 10.3969/j.issn.1001-8360.2019.03.006XU Fei, LUO Shi-hui, DENG Zi-gang. Study on key technologies and whole speed range application of maglev rail transport[J]. Journal of the China Railway Society, 2019, 41(3): 40-49. (in Chinese) doi: 10.3969/j.issn.1001-8360.2019.03.006 [5] 辛本雨, 何思源, 刘春秀. 中低速磁悬浮直线牵引电机设计[J]. 防爆电机, 2019, 54(1): 6-9. doi: 10.3969/J.ISSN.1008-7281.2019.01.02XIN Ben-yu, HE Si-yuan, LIU Chun-xiu. Design of medium-and low-speed maglev linear traction motor[J]. Explosion-Proof Electric Machine, 2019, 54(1): 6-9. (in Chinese) doi: 10.3969/J.ISSN.1008-7281.2019.01.02 [6] ZHANG Min, LUO Shi-hui, GAO Chang, et al. Research on the mechanism of a newly developed levitation frame with mid-set air spring[J]. Vehicle System Dynamics, 2018, 56(12): 1797-1816. doi: 10.1080/00423114.2018.1435892 [7] KIM M, JEONG J H, LIM J, et al. Design and control of levitation and guidance systems for a semi-high-speed maglev train[J]. Journal of Electrical Engineering and Technology, 2017, 12(1): 117-125. doi: 10.5370/JEET.2017.12.1.117 [8] 蔡文锋, 颜华, 杨平. 中低速磁浮轨道系统特点及工程适应性分析[J]. 铁道工程学报, 2015, 32(2): 54-59. doi: 10.3969/j.issn.1006-2106.2015.02.011CAI Wen-feng, YAN Hua, YANG Ping. Analysis of the characteristics and engineering adaptability of track system for medium and low speed maglev transit[J]. Journal of Railway Engineering Society, 2015, 32(2): 54-59. (in Chinese) doi: 10.3969/j.issn.1006-2106.2015.02.011 [9] ZHOU Dan-feng, HANSEN C H, LI Jie, et al. Review of coupled vibration problems in EMS maglev vehicles[J]. International Journal of Acoustics and Vibration, 2010, 15(1): 10-23. http://www.researchgate.net/publication/286222067_Review_of_Coupled_Vibration_Problems_in_EMS_Maglev_Vehicles [10] YABUNO H, KANDA R, LACARBONARA W, et al. Nonlinear active cancellation of the parametric resonance in a magnetically levitated body[J]. Journal of Dynamic Systems Measurement and Control-transactions of the ASME, 2004, 126(3): 433-442. doi: 10.1115/1.1789530 [11] KIM K J, HAN J B, HAN H S, et al. Coupled vibration analysis of maglev vehicle-guideway while standing still or moving at low speeds[J]. Vehicle System Dynamics, 2015, 53(4): 587-601. doi: 10.1080/00423114.2015.1013039 [12] 耿杰. 中低速磁浮简支轨道梁关键设计参数的理论与试验研究[D]. 成都: 西南交通大学, 2018.GENG Jie. Theory and experimental research of key parameters design on simply-supported track girders of low to medium speed maglev line[D]. Chengdu: Southwest Jiaotong University, 2018. (in Chinese) [13] 李小珍, 金鑫, 王党雄, 等. 长沙中低速磁浮运营线列车-桥梁系统耦合振动试验研究[J]. 振动与冲击, 2019, 38(13): 57-63. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ201913010.htmLI Xiao-zhen, JIN Xin, WANG Dang-xiong, et al. Tests for coupled vibration of a train-bridge system on Changsha low-medium speed maglev line[J]. Journal of Vibration and Shock, 2019, 38(13): 57-63. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ201913010.htm [14] 杨平, 刘德军, 李小珍. 中低速磁浮简支轨道梁动力系数研究[J]. 桥梁建设, 2016, 46(4): 79-84. https://www.cnki.com.cn/Article/CJFDTOTAL-QLJS201604015.htmYANG Ping, LIU De-jun, LI Xiao-zhen. Investigation of dynamic factors of low and medium speed maglev simply-supported guideway beam[J]. Bridge Construction, 2016, 46(4): 79-84. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QLJS201604015.htm [15] HAN H S, YIM B H, LEE N J, et al. Effects of the guideway's vibrational characteristics on the dynamics of a maglev vehicle[J]. Vehicle System Dynamics, 2009, 47(3): 309-324. doi: 10.1080/00423110802054342 [16] 刘卫东. 日本Linimo磁浮线的技术特点和运行情况[J]. 城市轨道交通研究, 2014, 17(4): 133-136. https://www.cnki.com.cn/Article/CJFDTOTAL-GDJT201404036.htmLIU Wei-dong. Technical characters and operation of the low-speed maglev line"Linimo" in Japan[J]. Urban Mass Transit, 2014, 17(4): 133-136. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GDJT201404036.htm [17] 张志洲, 张惠霞. 韩国磁悬浮列车发展[J]. 国外铁道车辆, 2006(4): 8-12. doi: 10.3969/j.issn.1002-7610.2006.04.002ZHANG Zhi-zhou, ZHANG Hui-xia. Development of magnetic levitation trains in Korea[J]. Foreign Rolling Stock, 2006(4): 8-12. (in Chinese) doi: 10.3969/j.issn.1002-7610.2006.04.002 [18] PARK D Y, SHIN B C, HAN H. Korea's urban maglev program[J]. Proceedings of the IEEE, 2009, 97(11): 1886-1891. doi: 10.1109/JPROC.2009.2030247 [19] 佟来生. 长沙磁浮快线列车概述[J]. 电力机车与城轨车辆, 2020, 43(4): 1-5. https://www.cnki.com.cn/Article/CJFDTOTAL-DJJI202004001.htmTONG Lai-sheng. Summary of Changsha maglev express train[J]. Electric Locomotives and Mass Transit Vehicles, 2020, 43(4): 1-5. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DJJI202004001.htm [20] 周源. 长沙中低速磁浮列车磁浮走行部的组装工艺[J]. 城市轨道交通研究, 2019, 22(7): 159-160, 164. https://www.cnki.com.cn/Article/CJFDTOTAL-GDJT201907043.htmZHOU Yuan. Assembly process of the levitation stock of Changsha medium and low speed maglev train[J]. Urban Mass Transit, 2019, 22(7): 159-160, 164. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GDJT201907043.htm [21] 王波, 罗世辉, 孙琦, 等. EMS型磁浮列车车体响应与轨道不平顺的相干性分析[J]. 机车电传动, 2020(2): 113-117. https://www.cnki.com.cn/Article/CJFDTOTAL-JCDC202002026.htmWANG Bo, LUO Shi-hui, SUN Qi, et al. Coherence analysis between vehicle vibration response of EMS maglev vehicles and track irregularities[J]. Electric Drive for Locomotives, 2020(2): 113-117. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCDC202002026.htm [22] 梁鑫, 罗世辉, 马卫华, 等. 磁浮列车单铁悬浮车桥耦合振动分析[J]. 交通运输工程学报, 2012, 12(2): 32-37. doi: 10.3969/j.issn.1671-1637.2012.02.006LIANG Xin, LUO Shi-hui, MA Wei-hua, et al. Coupling vibration an analysis of single-magnet suspension vehicle-bridge for maglev train[J]. Journal of Traffic and Transportation Engineering, 2012, 12(2): 32-37. (in Chinese) doi: 10.3969/j.issn.1671-1637.2012.02.006 [23] 梁鑫, 罗世辉, 马卫华. 单磁铁悬浮控制系统反馈参数动力学特性分析[J]. 噪声与振动控制, 2012, 32(5): 62-66, 135. https://www.cnki.com.cn/Article/CJFDTOTAL-ZSZK201205015.htmLIANG Xin, LUO Shi-hui, MA Wei-hua. Dynamic characteristics of feedback coefficient of single magnet suspension control system[J]. Noise and Vibration Control, 2012, 32(5): 62-66, 135. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZSZK201205015.htm [24] 徐银光, 蔡文锋. 中低速磁浮交通工程建设核心技术研究[J]. 铁道工程学报, 2015, 32(7): 82-87. doi: 10.3969/j.issn.1006-2106.2015.07.016XU Yin-guang, CAI Wen-feng. Research on the core technology of engineering construction for medium and low speed maglev transit[J]. Journal of Railway Engineering Society, 2015, 32(7): 82-87. (in Chinese) doi: 10.3969/j.issn.1006-2106.2015.07.016 [25] CAI Y, CHEN S S, ROTE D M. Vehicle/guideway dynamic interaction in maglev systems[J]. Journal of Dynamic Systems Measurement and Control, 1992, 118(3): 61-65. http://search.ebscohost.com/login.aspx?direct=true&db=aph&AN=9704253232&site=ehost-live [26] REN Shi-bo, ROMEIJN A, KALP K. Dynamic simulation of the maglev vehicle/guideway system[J]. Journal of Bridge Engineering, 2010, 15(3): 269-278. doi: 10.1061/(ASCE)BE.1943-5592.0000071 [27] MEISINGER R. Simulation of maglev vehicles riding over single and double span guideways[J]. Mathematics and Computers in Simulation, 1979, 21(2): 197-206. doi: 10.1016/0378-4754(79)90134-4 [28] MIN D J, JUNG M R, KIM M Y, et al. Dynamic interaction analysis of maglev-guideway system based on a 3D full vehicle model[J]. International Journal of Structural Stability and Dynamics, 2017, 17(1): 175-180. doi: 10.1142/S0219455417500067 [29] KWON S D, LEE J S, MOON J W, et al. Dynamic interaction analysis of urban transit maglev vehicle and guideway suspension bridge subjected to gusty wind[J]. Engineering Structures, 2008, 30(12): 3445-3456. doi: 10.1016/j.engstruct.2008.05.003 [30] KWON S D, LEE J S, KIM Y P, et al. Urban maglev transportation system and its dynamic coupling behaviours[J]. IABSE Symposium Report, 2009, 96(16): 54-61. http://www.ingentaconnect.com/content/iabse/report/2009/00000096/00000016/art00007 [31] 李小珍, 王党雄, 耿杰, 等. F轨对中低速磁浮列车-桥梁系统竖向耦合振动的影响研究[J]. 土木工程学报, 2017, 50(4): 97-106. https://www.cnki.com.cn/Article/CJFDTOTAL-TMGC201704012.htmLI Xiao-zhen, WANG Dang-xiong, GENG Jie, et al. Study on the influence of F-rail in vertical coupling vibration of low-medium speed maglev train-bridge system[J]. China Civil Engineering Journal, 2017, 50(4): 97-106. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TMGC201704012.htm [32] 黎松奇, 张昆仑. 磁浮列车车轨耦合振动仿真研究[J]. 计算机仿真, 2014, 31(8): 137-141. doi: 10.3969/j.issn.1006-9348.2014.08.031LI Song-qi, ZHANG Kun-lun. On simulation of track coupling vibration for maglev train[J]. Computer Simulation, 2014, 31(8): 137-141. (in Chinese) doi: 10.3969/j.issn.1006-9348.2014.08.031 [33] 梁鑫, 罗世辉, 马卫华. 基于相似原理的磁浮车桥耦合振动研究[J]. 铁道科学与工程学报, 2014, 11(3): 31-36. doi: 10.3969/j.issn.1672-7029.2014.03.005LIANG Xin, LUO Shi-hui, MA Wei-hua. Study on coupling vibration of maglev vehicle-bridge based on the similarity theory[J]. Journal of Railway Science and Engineering, 2014, 11(3): 31-36. (in Chinese) doi: 10.3969/j.issn.1672-7029.2014.03.005 [34] CHI Zhen-xiang, LI Jie. Simulation analysis of the vehicle-guideway coupling vibration of EMS maglev train[C]//IEEE. Proceedings of the 36th Chinese Control Conference. New York: IEEE, 2017: 10376-10380. [35] YAU J D. Aerodynamic vibrations of a maglev vehicle running on flexible guideways under oncoming wind actions[J]. Journal of Sound and Vibration, 2010, 329(10): 1743-1759. doi: 10.1016/j.jsv.2009.11.039 [36] YAU J D. Interaction response of maglev masses moving on a suspended beam shaken by horizontal ground motion[J]. Journal of Sound and Vibration, 2010, 329(2): 171-188. doi: 10.1016/j.jsv.2009.08.038 [37] YAU J D. Vibration control of maglev vehicles traveling over a flexible guideway[J]. Journal of Sound and Vibration, 2009, 321: 184-200. doi: 10.1016/j.jsv.2008.09.030 [38] 赵春发, 翟婉明. 低速磁浮车辆导向方式及其横向动态特性[J]. 中国铁道科学, 2005, 26(6): 28-32. doi: 10.3321/j.issn:1001-4632.2005.06.006ZHAO Chun-fa, ZHAI Wan-ming. Guidance mode and lateral dynamic characteristics of low speed maglev vehicle[J]. China Railway Science, 2005, 26(6): 28-32. (in Chinese) doi: 10.3321/j.issn:1001-4632.2005.06.006 [39] 赵春发, 翟婉明. 常导电磁悬浮动态特性研究[J]. 西南交通大学学报, 2004, 39(4): 464-468. doi: 10.3969/j.issn.0258-2724.2004.04.011ZHAO Chun-fa, ZHAI Wan-ming. Dynamic characteristics of electromagnetic levitation systems[J]. Journal of Southwest Jiaotong University, 2004, 39(4): 464-468. (in Chinese) doi: 10.3969/j.issn.0258-2724.2004.04.011 [40] 邹东升, 佘龙华, 张志强, 等. 磁浮系统车轨耦合振动分析[J]. 电子学报, 2010, 38(9): 2071-2075. https://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201009019.htmZOU Dong-sheng, SHE Long-hua, ZHANG Zhi-qiang, et al. Maglev vehicle and guideway coupling vibration analysis[J]. Acta Electronica Sinica, 2010, 38(9): 2071-2075. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201009019.htm [41] 王洪坡, 李杰. 一类非自治位置时滞反馈控制系统的亚谐共振响应[J]. 物理学报, 2007, 56(5): 2504-2516. doi: 10.3321/j.issn:1000-3290.2007.05.007WANG Hong-po, LI Jie. Sub-harmonic resonances of the non-autonomous system with delayed position feedback control[J]. Acta Physica Sinica, 2007, 56(5): 2504-2516. (in Chinese) doi: 10.3321/j.issn:1000-3290.2007.05.007 [42] WANG Hong-po, LI Jie, ZHANG Kun. Stability and Hopf bifurcation of the maglev system with delayed speed feedback control[J]. Acta Automatica Sinica, 2007, 33(8): 829-834. doi: 10.1360/aas-007-0829 [43] 张玲玲. 磁浮列车悬浮系统的Hopf分岔及滑模控制研究[D]. 长沙: 湖南大学, 2010.ZHANG Ling-ling. Research on Hopf bifurcation and sliding mode control for suspension system of maglev train[D]. Changsha: Hunan University, 2010. (in Chinese) [44] ZHANG Ling-ling, HUANG Li-hong, ZHANG Zhi-zhou. Stability and Hopf bifurcation of the maglev system with delayed position and speed feedback control[J]. Nonlinear Dynamics, 2009, 57(1/2): 197-207. http://www.cqvip.com/QK/90250X/20078/25131143.html [45] 李金辉. EMS型磁浮列车-桥梁耦合振动控制技术研究[D]. 长沙: 国防科学技术大学, 2015.LI Jin-hui. The vibration control technology of EMS maglev vehicle-bridge coupled system[D]. Changsha: Graduate School of National University of Defense Technology, 2015. (in Chinese) [46] HE Guang, LI Jie, CUI Peng. Decoupling control design for the module suspension control system in maglev train[J]. Mathematical Problems in Engineering, 2015, DOI: 10.1155/2015/865650. [47] HE Guang, LI Jie, LI Yun, et al. Interactions analysis in the maglev bogie with decentralized controllers using an effective relative gain array measure[C]//IEEE. 2013 10th IEEE International Conference on Control and Automation. New York: IEEE, 2013: 1070-1075. [48] HE Guang, LI Jie, CUI Peng. Nonlinear Control scheme for the levitation module of maglev train[J]. Journal of Dynamic Systems, Measurement and Control, 2016, 138(7): 4-8. http://smartsearch.nstl.gov.cn/paper_detail.html?id=eedee43c001462a102cf4914024cc997 [49] LI Yun, HE Guang, LI Jie. Nonlinear robust observer-based fault detection for networked suspension control system of maglev train[J]. Mathematical Problems in Engineering, 2013(14): 147-160. http://www.researchgate.net/publication/258397490_Nonlinear_Robust_Observer-Based_Fault_Detection_for_Networked_Suspension_Control_System_of_Maglev_Train [50] LONG Zhi-qiang, HE Guang, XUE Song. Study of EDS and EMS hybrid suspension system with per-manent magnet Halbach array[J]. IEEE Transactions on Magnetics, 2011, 47(12): 4717-4724. doi: 10.1109/TMAG.2011.2159237 [51] HE Guang, LI Jie, CUI Peng, et al. T-S fuzzy model based control strategy for the networked suspension control system of maglev train[J]. Mathematical Problems in Engineering, 2015, DOI: 10.1155/2015/291702. [52] CHEN Xiao-hao, MA Wei-hua, LUO Shi-hui, et al. A vehicle-track beam matching index in EMS maglev transportation system[J]. Archive of Applied Mechanics, 2020, 90(4): 773-787. doi: 10.1007/s00419-019-01638-6 [53] CHEN Xiao-hao, MA Wei-hua, LUO Shi-hui. Study on stability and bifurcation of electromagnet-track beam coupling system for EMS maglev vehicle[J]. Nonlinear Dynamics, 2020, 101(4): 2181-2193. doi: 10.1007/s11071-020-05917-8 [54] 张志洲, 李晓龙, 龙志强. 基于状态观测器的磁悬浮列车传感器故障容错方法[J]. 机车电传动, 2008(4): 39-42. https://www.cnki.com.cn/Article/CJFDTOTAL-JCDC200804011.htmZHANG Zhi-zhou, LI Xiao-long, LONG Zhi-qiang. Sensor fault tolerance method for maglev train based on state-observer[J]. Electric Drive for Locomotives, 2008(4): 39-42. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCDC200804011.htm [55] YETENDJE A, SERON M M, DE DONA J A, et al. Sensor fault-tolerant control of a magnetic levitation system[J]. International Journal of Robust and Nonlinear Control, 2010, 20(18): 2108-2121. doi: 10.1002/rnc.1572 [56] HE Ning, LONG Zhi-qiang, XUE Song. Switching algorithm for maglev train double-modular redundant positioning sensors[J]. Sensors, 2012, 12(8): 11294-11306. doi: 10.3390/s120811294 [57] 秦岭. 磁悬浮列车悬浮系统容错控制的研究[J]. 智慧工厂, 2014(7): 80-84, 90. https://www.cnki.com.cn/Article/CJFDTOTAL-JCDC201201005.htmQIN Ling. Research on fault-tolerant controllers for maglev levitation system[J]. Smart Factory, 2014(7): 80-84, 90. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCDC201201005.htm [58] 龙志强, 薛松, 陈慧星. 基于LMI的磁浮列车悬浮系统被动容错控制[J]. 计算机仿真, 2008(2): 265-268. doi: 10.3969/j.issn.1006-9348.2008.02.069LONG Zhi-qiang, XUE Song, CHEN Hui-xing. Passive fault tolerant control for suspension system of maglev train based on LMI[J]. Computer Simulation, 2008(2): 265-268. (in Chinese) doi: 10.3969/j.issn.1006-9348.2008.02.069 [59] 严伟, 滕青芳, 范多旺. 考虑输入滞后的磁悬浮列车悬浮系统的鲁棒H∞容错控制[J]. 机车电传动, 2012(1): 25-29, 32. doi: 10.3969/j.issn.1000-128X.2012.01.006YAN Wei, TENG Qing-fang, FAN Duo-wang. Robust H∞ fault tolerant control on suspension system of maglev train with delayed input[J]. Electric Drive for Locomotives, 2012(1): 25-29, 32. (in Chinese) doi: 10.3969/j.issn.1000-128X.2012.01.006 [60] SUNG H K, KIM D S, CHO H J, et al. Fault tolerant control of electromagnetic levitation system[J]. Advances in Industrial Control, 2004, 57(10): 676-689. http://www.researchgate.net/publication/228814877_Fault_tolerant_control_of_electromagnetic_levitation_system [61] SUNG H K, LEE S H, BIEN Z. Design and implementation of a fault tolerant controller for EMS systems[J]. Mechatronics, 2005, 15(10): 1253-1272. doi: 10.1016/j.mechatronics.2005.04.003 [62] ZHOU Hai-bo, DUAN Ji-an. A novel levitation control strategy for a class of redundant actuation maglev system[J]. Control Engineering Practice, 2011, 19(12): 1468-1478. doi: 10.1016/j.conengprac.2011.08.006 [63] 向湘林, 龙志强, 梁潇, 等. 中低速磁悬浮列车、走行部及用于提高冗余的搭接结构: 中国, CN208452798U[P]. 2019-02-01.XIANG Xiang-lin, LONG Zhi-qiang, LIANG Xiao, et al. Medium and low speed maglev train, running gear and overlap structure for improving redundancy: China, CN208452798U[P]. 2019-02-01. (in Chinese) [64] 韩鹏, 林国斌, 徐俊起, 等. 一种中低速磁浮列车悬浮冗余系统: 中国, CN108372798A[P]. 2018-08-07.HAN Peng, LIN Guo-bin, XU Jun-qi, et al. Suspension redundancy system of medium and low speed maglev train: China, CN108372798A[P]. 2018-08-07. (in Chinese) [65] 孙友刚, 林国斌, 高定刚, 等. 一种具有冗余功能的中低速磁浮车辆走行部: 中国, CN110254446A[P]. 2019-09-20.SUN You-gang, LIN Guo-bin, GAO Ding-gang, et al. A middle and low speed maglev vehicle running gear with redundancy function: China, CN110254446A[P]. 2019-09-20. (in Chinese) [66] 龙志强, 吕治国, 常文森. 基于模糊故障树的磁浮列车悬浮系统故障诊断[J]. 控制与决策, 2004(2): 139-142. doi: 10.3321/j.issn:1001-0920.2004.02.004LONG Zhi-qiang, LYU Zhi-guo, CHANG Wen-sen. Fault diagnosis to suspension system of maglev train based on fuzzy fault tree[J]. Control and Decision, 2004(2): 139-142. (in Chinese) doi: 10.3321/j.issn:1001-0920.2004.02.004 [67] 钟慧娟, 龙志强, 洪华杰. 磁悬浮列车PLC故障自诊断方法研究[J]. 电气传动, 2003(1): 40-42, 50. doi: 10.3969/j.issn.1001-2095.2003.01.010ZHONG Hui-juan, LONG Zhi-qiang, HONG Hua-jie. The method of PLC diagnosis on maglev train[J]. Electric Drive, 2003(1): 40-42, 50. (in Chinese) doi: 10.3969/j.issn.1001-2095.2003.01.010 [68] LIU Zhi-gang, HOU Yun-chang, FU Wei-jie. Communication simulation of on-board diagnosis network in high-speed maglev trains[J]. Journal of Modern Transportation, 2011, 19(4): 240-246. doi: 10.1007/BF03325764 [69] CUI Ying-pu, SHE Long-hua, LI Xiao-long, et al. Fault diagnosis for suspension signal of maglev vehicle based on mathematical model[J]. Applied Mechanics and Materials, 2012, 190-191: 987-992. doi: 10.4028/www.scientific.net/AMM.190-191.987 [70] LI Yun, LI Jie, ZHANG Geng, et al. Disturbance decoupled fault diagnosis for sensor fault of maglev suspension system[J]. Journal of Central South University, 2013, 20(6): 1545-1551. doi: 10.1007/s11771-013-1646-0 [71] 翟婉明, 赵春发. 磁浮车辆/轨道系统动力学(Ⅰ)——磁/轨相互作用及稳定性[J]. 机械工程学报, 2005(7): 1-10. doi: 10.3321/j.issn:0577-6686.2005.07.001ZHAI Wan-ming, ZHAO Chun-fa. Dynamics of maglev vehicle/track system (Ⅰ)——magnetic/track interaction and stability[J]. Journal of Mechanical Engineering, 2005(7): 1-10. (in Chinese) doi: 10.3321/j.issn:0577-6686.2005.07.001 [72] 王成杰, 伍星, 张静, 等. 中低速磁浮列车悬浮控制策略研究综述[J]. 电气自动化, 2019, 41(5): 1-3, 56. doi: 10.3969/j.issn.1000-3886.2019.05.001WANG Cheng-jie, WU Xing, ZHANG Jing, et al. Summary of researches on levitation control strategies for low and medium speed maglev trains[J]. Electrical Automation, 2019, 41(5): 1-3, 56. (in Chinese) doi: 10.3969/j.issn.1000-3886.2019.05.001 [73] 孙玉昆, 张昆仑. 磁悬浮列车的非线性鲁棒控制[J]. 机车电传动, 2005(6): 29-32. doi: 10.3969/j.issn.1000-128X.2005.06.008SUN Yu-kun, ZHANG Kun-lun. Nonlinear robust control of maglev train[J]. Electric Drive for Locomotives, 2005(6): 29-32. (in Chinese) doi: 10.3969/j.issn.1000-128X.2005.06.008 [74] 马忠宝, 孙荣斌. 磁悬浮列车电磁悬浮系统的自适应模糊滑模控制[J]. 机车电传动, 2007(1): 29-32. doi: 10.3969/j.issn.1000-128X.2007.01.010MA Zhong-bao, SUN Rong-bin. Adaptive fuzzy sliding mode control for electromagnetic suspension system of maglev train[J]. Electric Drive for Locomotives, 2007(1): 29-32. (in Chinese) doi: 10.3969/j.issn.1000-128X.2007.01.010 [75] 李云钢, 常文森. 磁浮列车悬浮系统的串级控制[J]. 自动化学报, 1999(2): 107-111. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO902.016.htmLI Yun-gang, CHANG Wen-sen. Cascade control of an EMS maglev vehicle's levitation control system[J]. Acta Automatica Sinica, 1999(2): 107-111. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO902.016.htm [76] 黎松奇, 张昆仑, 刘国清, 等. 基于逆系统方法的磁浮列车非线性控制[J]. 控制工程, 2017, 24(8): 1542-1546. https://www.cnki.com.cn/Article/CJFDTOTAL-JZDF201708004.htmLI Song-qi, ZHANG Kun-lun, LIU Guo-qing, et al. Nonlinear control of maglev train based on inverse system method[J]. Control Engineering of China, 2017, 24(8): 1542-1546. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JZDF201708004.htm [77] LIANG Xiao. Research of maglev train suspension algorithm based on active disturbance rejection control[C]//IEEE. 2016 IEEE International Conference on Information and Automation. New York: IEEE, 2016: 1296-1300. [78] CHEN Chen, XU Jun-qi, JI Wen, et al. Adaptive levitation control for characteristic model of low speed maglev vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2020, 234(7): 1-12. http://www.researchgate.net/publication/338486371_Adaptive_levitation_control_for_characteristic_model_of_low_speed_maglev_vehicle [79] SUN You-gang, LI Wan-li, QIANG Hai-yan. The design and realization of magnetic suspension controller of low-speed maglev train[C]//IEEE. 2016 IEEE/SICE International Symposium on System Integration. New York: IEEE, 2016: 1-6. [80] 王玉国. 电磁悬浮系统的专家PID控制[J]. 唐山学院学报, 2008(2): 29-30. doi: 10.3969/j.issn.1672-349X.2008.02.012WANG Yu-guo. Expert PID control for electro-magnetic suspension system[J]. Journal of Tangshan College, 2008(2): 29-30. (in Chinese) doi: 10.3969/j.issn.1672-349X.2008.02.012 [81] DAGHOOGHI Z, MENHAJ M B, ZOMORODIAN A, et al. A real-time control of maglev system using neural networks and genetic algorithms[C]//IEEE. 2012 IEEE International Conference on Information and Automation(ICIA). New York: IEEE, 2012: 527-532. [82] 陈屹. 城市轨道交通四轨供电方式的探讨[J]. 电气化铁道, 2010(2): 49-50. doi: 10.3969/j.issn.1007-936X.2010.02.016CHEN Yi. Discussion on four rail power supply mode of urban rail transit[J]. Electric Railway, 2010(2): 49-50. (in Chinese) doi: 10.3969/j.issn.1007-936X.2010.02.016 [83] 胡基士, 潘慧龙. 磁浮列车受流器设计依据分析[J]. 西南交通大学学报, 2000(2): 170-173. doi: 10.3969/j.issn.0258-2724.2000.02.015HU Ji-shi, PAN Hui-long. A design basis for collector of maglev trains[J]. Journal of Southwest Jiaotong University, 2000(2): 170-173. (in Chinese) doi: 10.3969/j.issn.0258-2724.2000.02.015 [84] 李宁, 陈革. 常导中低速磁悬浮列车受流方式选择及受流器结构设计[J]. 电力机车与城轨车辆, 2007(2): 14-15, 19. doi: 10.3969/j.issn.1672-1187.2007.02.004LI Ning, CHEN Ge. Current collection modes choice and collector structure design of the mid-/low-speed EMS maglev train[J]. Electric Locomotives and Mass Transit Vehicles, 2007(2): 14-15, 19. (in Chinese) doi: 10.3969/j.issn.1672-1187.2007.02.004 [85] 宋伟. 接触轨安装精度对中低速磁浮列车受流的影响[J]. 电气化铁道, 2014(5): 33-35. doi: 10.3969/j.issn.1007-936X.2014.05.010SONG Wei. Influence of installation accuracy of contact rail on current collection of medium and low speed maglev train[J]. Electric Railway, 2014(5): 33-35. (in Chinese) doi: 10.3969/j.issn.1007-936X.2014.05.010 [86] 张鹏飞. 中低速磁浮列车靴轨系统优化[D]. 成都: 西南交通大学, 2018.ZHANG Peng-fei. Optimization of boot and rail system for medium and low speed maglev train[D]. Chengdu: Southwest Jiaotong University, 2018. (in Chinese) [87] 刘铭. 160 km·h-1磁浮列车靴轨系统动力学研究[D]. 成都: 西南交通大学, 2018.LIU Ming. Research on dynamics of the 160 km·h-1 maglev train collector shoe and contact rail system[D]. Chengdu: Southwest Jiaotong University, 2018. (in Chinese) [88] 彭宝林, 历洋. 160 km·h-1速度等级磁浮列车受流器研究[J]. 机电信息, 2019(11): 13-15. doi: 10.3969/j.issn.1671-0797.2019.11.007PENG Bao-lin, LI Yang. Research on current collector of 160 km·h-1 maglev train[J]. Mechanical and Electrical Information, 2019(11): 13-15. (in Chinese) doi: 10.3969/j.issn.1671-0797.2019.11.007 [89] WESTON P F, STEWART E, ROBERTS C. Measuring the dynamic interaction between electric vehicle shoegear and the third rail[C]//IEEE. IET International Conference on Railway Engineering 2008. New York: IEEE, 2008: 14-17. [90] STEWART E, WESTON P F, HILLMANSEN S, et al. Using bogie-mounted sensors to understand the dynamics of third rail current collection systems[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 2011, 225(2): 219-227. doi: 10.1177/09544097JRRT401 [91] 杨新斌. 中低速磁浮车辆轻量化探讨[J]. 电力机车与城轨车辆, 2014, 37(1): 58-60. https://www.cnki.com.cn/Article/CJFDTOTAL-DJJI201401019.htmYANG Xin-bin. Lightweight discussion of mid-low speed maglev vehicle[J]. Electric Locomotives and Mass Transit Vehicles, 2014, 37(1): 58-60. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DJJI201401019.htm [92] 赵洪伦, 俞程亮, 王文斌. 高速磁浮列车车体承载结构优化设计研究[J]. 铁道学报, 2007(4): 43-47. doi: 10.3321/j.issn:1001-8360.2007.04.009ZHAO Hong-lun, YU Cheng-liang, WANG Wen-bin. Study on optimization design of carbody structure of high-speed maglev train[J]. Journal of the China Railway Society, 2007(4): 43-47. (in Chinese) doi: 10.3321/j.issn:1001-8360.2007.04.009 [93] 赵军. 中低速磁浮列车车体轻量化设计[D]. 成都: 西南交通大学, 2017.ZHAO Jun. Lightweight design of medium-low speed maglev train carbody[D]. Chengdu: Southwest Jiaotong University, 2017. (in Chinese) [94] 周益, 刘放, 何岚, 等. 长定子中低速磁浮直线电机动力学数值分析与优化设计[J]. 机械设计与制造, 2012(5): 36-38. doi: 10.3969/j.issn.1001-3997.2012.05.014ZHOU Yi, LIU Fang, HE Lan, et al. Dynamics numerical analysis and optimization design of long stator linear motor for low-speed maglev train[J]. Machinery Design and Manufacture, 2012(5): 36-38. (in Chinese) doi: 10.3969/j.issn.1001-3997.2012.05.014 [95] 罗玗琪, 许平, 谢卓君. 磁浮列车走行机构结构优化研究[J]. 城市轨道交通研究, 2011, 14(11): 86-89, 92. doi: 10.3969/j.issn.1007-869X.2011.11.020LUO Yu-qi, XU Ping, XIE Zhuo-jun. Research on structure optimization of running gear of maglev train[J]. Urban Mass Transit, 2011, 14(11): 86-89, 92. (in Chinese) doi: 10.3969/j.issn.1007-869X.2011.11.020 [96] 何肖, 顾保南. 我国大陆各城市轨道交通线路旅行速度统计分析—基于中国城市轨道交通协会数据分析的研究报告之七[J]. 城市轨道交通研究, 2020, 23(1): 1-5. https://www.cnki.com.cn/Article/CJFDTOTAL-GDJT202001002.htmHE Xiao, GU Bao-nan. Statistical analysis of travel speed of urban rail transit lines in mainland China—Report 7: Analysis of data from China association of metros[J]. Urban Mass Transit, 2020, 23(1): 1-5. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GDJT202001002.htm [97] 梁潇, 陈峰, 傅庆湘. 160 km·h-1中速磁浮交通系统的关键技术问题[J]. 城市轨道交通研究, 2019, 22(9): 21-26. https://www.cnki.com.cn/Article/CJFDTOTAL-GDJT201909008.htmLIANG Xiao, CHEN Feng, FU Qing-xiang. Key technical issues on 160 km·h-1 medium-speed maglev transit system[J]. Urban Mass Transit, 2019, 22(9): 21-26. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GDJT201909008.htm -







 点击查看大图
点击查看大图
计量
- 文章访问数: 1766
- HTML全文浏览量: 1660
- PDF下载量: 524
- 被引次数: 0
