

-
摘要: 为促进中国自动驾驶技术发展,在充分调研论证的基础上,按照工具化设计的理念,国家自然科学基金委员会交通与运载工程学科提出了场景库社会共建、开发环境敏捷、被测技术解耦、测试部署轻量化、评测结果公开透明的自动驾驶测试公共服务平台OnSite的建设构想,设置了战略委员会、技术委员会、用户委员会、创新基金会,自主决策,达成公共服务平台独立发展,良好运行的目标。2021年,交通与运载工程学科通过面上项目群快速启动本领域研究,2022年起,持续通过重点项目、面上项目群资助自动驾驶测评相关技术研究,推动OnSite平台建设,积极开展有组织科研。制定了单项决策规划能力测评-从单项测评到全栈技术测评-从虚拟测评到虚实融合测评-从单车测评到车队测评-从测评导向到开发测评一体五阶段公共服务平台建设计划;目前,已完成第1阶段建设目标,已形成面向单项决策规划功能的测试能力。以OnSite平台为依托,学科已成功举办第一届OnSite自动驾驶算法挑战赛,有助于科研人员明确研究差距,促进实现需求牵引,问题导向的研究范式。打破科研机构与产业部门的壁垒,实现产-学-研精准、快速对接。此外,通过以赛代评,将进一步完善基础研究项目评价体系,切实推进破“四唯”工作。Abstract: To promote the development of autonomous driving technology in China, by conducting a comprehensive survey and adhering to the principles of instrumental design, the transportation and vehicle engineering discipline of the National Natural Science Foundation of China proposed a public service platform for autonomous driving tests (OnSite). The platform embodied the principles of socially co-constructed scenario library, agile development environment, system-under-test decoupling, lightweight test deployment, and transparent test result sharing. To ensure the independent development and smooth operation of the public service platform, the strategic committee, technical committee, user committee, and innovation foundation were set up through the self-decision-making. In 2021, research in this field was launched rapidly through the support of general programs by the transportation and vehicle engineering discipline. From 2022, research related to the autonomous driving technology testing was supported by the key and general programs. The construction of the OnSite platform was promoted, and the organized scientific research was actively carried out. A five-stage construction plan for the public service platform was devised, which follows the steps of single-item decision-making and planning testing, from single-item testing to full-stack testing, from virtual testing to virtual-real fusion testing, from single-vehicle testing to fleet testing, and from testing-orientation to development testing. The first phase of the construction goals was accomplished, and the testing capability for the single-item decision-making and planning functions was developed. Relying on the OnSite platform, the First OnSite Autonomous Driving Algorithm Competition was successfully held by the transportation and vehicle engineering discipline, which assisted researchers in pinpointing research gaps and promoted the realization of a demand-driven and problem-oriented research paradigm. It broke the barriers between the scientific research institutions and the industrial sectors and realized the accurate and rapid docking among industry, academia, and research. Furthermore, the OnSite competition was utilized the competition for testing, improved the evaluation system of the basic research programs, and contributed to addressing the issue of pursuing only four aspects.
-

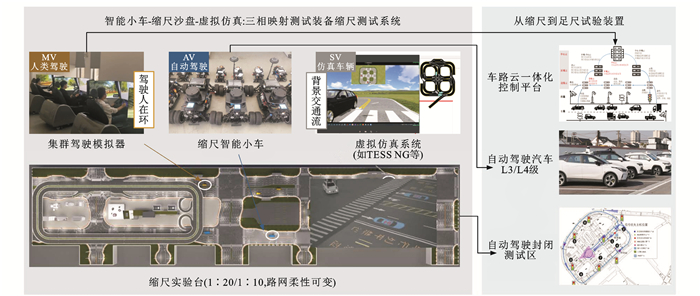
图 5 OnSite 3.0虚实融合测试(通过三相映射装置支持整车在环测试能力)
Figure 5. OnSite 3.0 virtual-real fusion test (supporting full vehicle in-the-loop testing capability via three-phase mapping device)

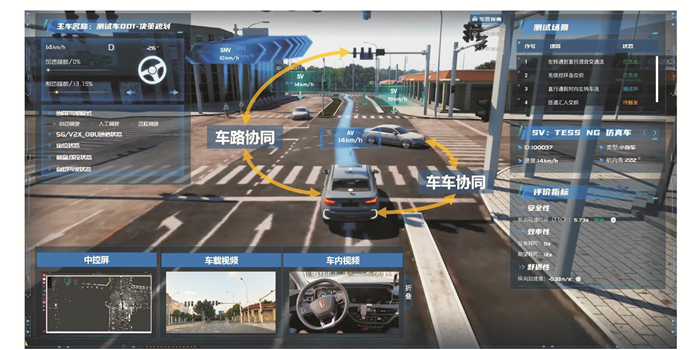
图 6 OnSite 4.0协同自动驾驶测试(支持多车协同、对抗测试能力)
Figure 6. OnSite 4.0 collaborative autonomous driving test (supporting multi-vehicle collaboration, adversarial testing capabilities)
表 1 第二届OnSite自动驾驶算法挑战赛框架
Table 1. Framework for 2nd OnSite Autonomous Driving Algorithm Competition
2类测试场景 片段式场景 连续式场景 基本段 汇入汇出区 长时、复杂路网 交叉口 环岛 两大测试方法 回放测试 双向交互测试 六大赛道 面向决策规划算法 面向全栈算法 综合场景回放测试 非结构化场景测试 端到端测试 片段式场景交互测试 连续式场景交互测试 多车对抗/生存赛 六维评价 安全性 舒适性 效率性 交互性 拟人性 合规性  下载: 导出CSV
下载: 导出CSV
-
[1] NAUMANN R B, KREUGER L K, SANDT L, et al. Examining the safety benefits of partial vehicle automation technologies in an uncertain future[R]. Washington DC: AAA Foundation for Traffic Safety, 2023. [2] 王之中, 皮大伟, 刘全民, 等. 国家自然科学基金委员会交通与运载工程学科2022年度管理工作综述与展望[J]. 交通运输工程学报, 2023, 23(1): 1-7. doi: 10.19818/j.cnki.1671-1637.2023.01.001WANG Zhi-zhong, PI Da-wei, LIU Quan-min, et al. Management summary and prospect of transportation and vehicle engineering discipline of NSFC in 2022[J]. Journal of Traffic and Transportation Engineering, 2023, 23(1): 1-7. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2023.01.001 [3] 王之中, 皮大伟, 吴兵. 国家自然科学基金委员会交通与运载工程学科2021年度管理工作综述与未来工作展望[J]. 交通运输工程学报, 2021, 21(6): 1-7. doi: 10.19818/j.cnki.1671-1637.2021.06.001WANG Zhi-zhong, PI Da-wei, WU Bing. Management summary of transportation and vehicle engineering discipline in NSFC: review and prospects in 2021[J]. Journal of Traffic and Transportation Engineering, 2021, 21(6): 1-7. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2021.06.001 [4] 王之中, 皮大伟, 吴兵. 从工程科学走向工程技术—新时期交通与运载工程学科发展与展望[J]. 交通运输工程学报, 2021, 21(5): 1-5. doi: 10.19818/j.cnki.1671-1637.2021.05.001WANG Zhi-zhong, PI Da-wei, WU Bing. From engineering science towards engineering technology: development and prospect of transportation and vehicle engineering in new era[J]. Journal of Traffic and Transportation Engineering, 2021, 21(5): 1-5. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2021.05.001 [5] 王之中, 皮大伟, 吴兵. 交通与运载工程学科践行板块改革侧记[J]. 中国科学基金, 2023, 37(1): 115-119.WANG Zhi-zhong, PI Da-wei, WU Bing. Sidelights on the reform of transportation and vehicle engineering discipline[J]. Bulletin of National Natural Science Foundation of China, 2023, 37(1): 115-119. (in Chinese) [6] SUN Jian, ZHANG He, ZHOU Hua-jun, et al. Scenario-based test automation for highly automated vehicles: a review and paving the way for systematic safety assurance[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(9): 14088-14103. doi: 10.1109/TITS.2021.3136353 [7] 余荣杰, 田野, 孙剑. 高等级自动驾驶汽车虚拟测试: 研究进展与前沿[J]. 中国公路学报, 2020, 33(11): 125-138.YU Rong-jie, TIAN Ye, SUN Jian. Highly automated vehicle virtual testing: a review of recent developments and research frontiers[J]. China Journal of Highway and Transport, 2020, 33(11): 125-138. (in Chinese) [8] ZHANG He, SUN Jian, TIAN Ye. Accelerated safety testing for highly automated vehicles: application and capability comparison of surrogate models[J]. IEEE Transactions on Intelligent Vehicles, 2023, 9: 1-10. -



 点击查看大图
点击查看大图

计量
- 文章访问数: 683
- HTML全文浏览量: 114
- PDF下载量: 258
- 被引次数: 0
