

Coordination control method of regional traffic flow
-
摘要: 根据Agent技术和模糊控制方法, 提出了区域交通流协调控制方法。以路段拥挤度和绿灯持续时间为输入变量, 以绿灯修正延长时间为输出变量, 确定了变量数据的获取方式以及变量之间的对应关系, 设计了协调控制器。根据下游交叉口配时的不同方案, 制定了不同的模糊控制规则, 修正了控制策略, 并运用MATLAB进行仿真。仿真结果表明: 采用Agent技术和模糊控制方法后, 平均总延误为127.431 s·km-1, 下降了约9.9%;路段平均流量密度为18.828 veh·km-1; 路段平均流量为9 597 veh·h-1; 平均车速为17.798 km·h-1, 提高了约6.3%。可见, 路网密度明显降低, 交通状况明显改善。Abstract: On the basis of agent technology and fuzzy control method, a coordination control method of regional traffic flow was proposed. Section congestion degree and green light duration were taken as input variables, green light's correction prolong time was taken as output variable, the acquiring methods of variable data and the corresponding relationships among the variables were determined, and a coordination controller was designed. According to different schemes of time assignments at downstream intersections, various fuzzy control rules were formulated, control strategy was corrected, and corresponding simulation was carried out by MATLAB. Simulation result shows that after using the control method, average total delay is 127.431 s·km-1, and decreases by about 9.9%. Average section density is 18.828 veh·km-1. Average section flow is 9 597 veh·h-1. Average speed is 17.798 km·h-1, and rises by about 6.3%. It can be significantly seen that with the method section density decreases, and traffic condition is improved.
-
Key words:
- traffic control /
- regional traffic flow /
- coordination control /
- fuzzy control /
- agent technology
-
表 1 路段拥挤度参数值
Table 1. Parameter values of road congestion degrees
参数 Z VS S M L VL σ1 0.11 0.12 0.11 0.11 0.09 0.10 a1 0.00 0.17 0.37 0.58 0.80 1.00  下载: 导出CSV
下载: 导出CSV
表 2 绿灯持续时间参数值
Table 2. Parameter values in green light duration
参数 VS S M L VL σ2 0.136 0.100 0.120 0.100 0.100 a2 0.000 0.250 0.500 0.750 1.000
下载: 导出CSV
表 3 绿灯修正延长时间参数值
Table 3. Parameter values of correction prolong times for green light
参数 Z VS S M L VL σ3 0.95 0.96 0.96 0.95 0.95 0.85 a3 0.00 2.00 4.00 6.00 8.00 10.00
下载: 导出CSV
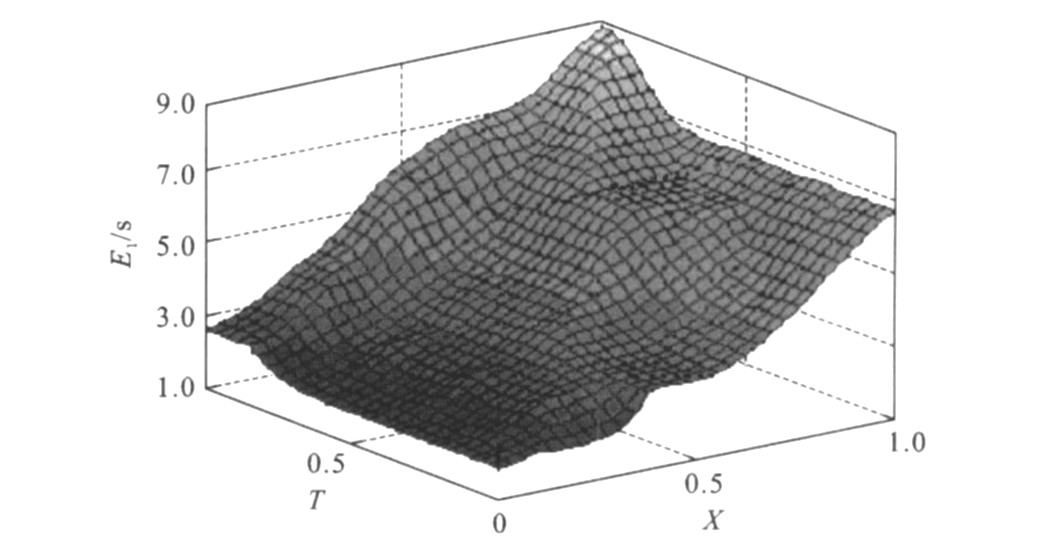
表 4 绿灯时模糊规则
Table 4. Fuzzy rules in green time
T X Z VS S M L VL VS Z Z VS VS S M S Z Z VS VS S M M Z Z VS S S M L Z Z S S M M VL Z VS S M M L
下载: 导出CSV
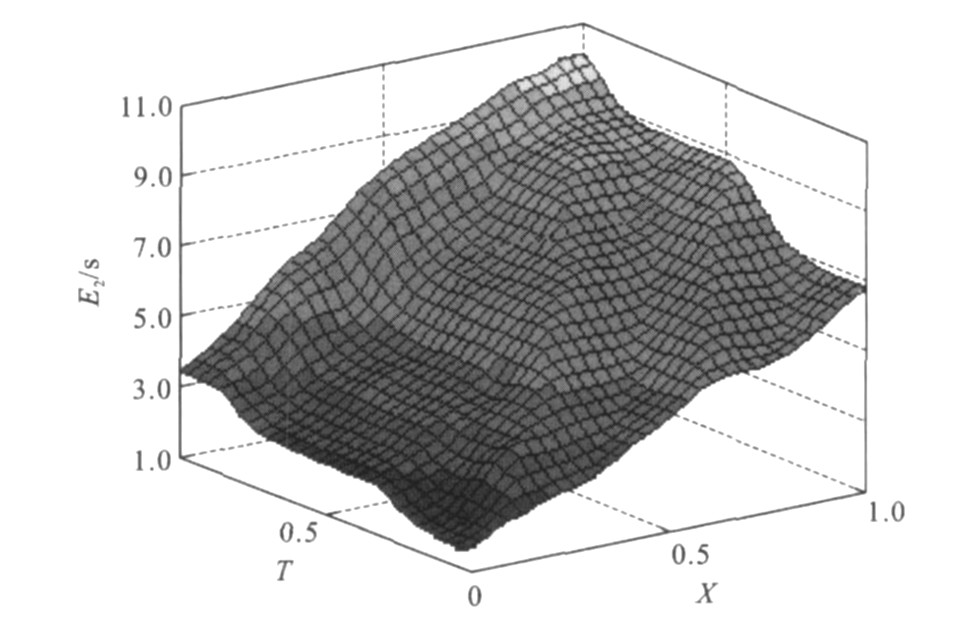
表 5 红灯时模糊规则制定
Table 5. Fuzzy rule in red time
T X Z VS S M L VL VS Z Z VS S S M S Z Z S S M M M Z VS S M M L L Z VS S M L L VL Z Z M L L VL
下载: 导出CSV
表 6 仿真结果
Table 6. Simulation result
指标 小汽车 货车 公交车 总体 均值 标准差 均值 标准差 均值 标准差 均值 标准差 延误/(s·km-1) 定时控制 139.771 6.347 152.951 8.493 174.329 9.119 141.355 6.443 模糊控制 125.739 4.395 142.773 6.633 159.364 3.411 127.431 4.353 密度/(veh·km-1) 定时控制 17.264 0.783 1.007 19.054 模糊控制 17.062 0.759 1.007 18.828 流量/(veh·h-1) 定时控制 9 057 398 295 9750 模糊控制 8 917 392 288 9597 行程车速/(km·h-1) 定时控制 16.815 0.489 14.951 0.519 14.922 0.544 16.666 0.488 模糊控制 17.979 0.357 15.606 0.428 15.889 0.237 17.798 0.346
下载: 导出CSV
表 7 分析结果
Table 7. Analysis result
评价指标 定时控制 模糊控制 总路程/km 21 266.4 20 872.7 总行程时间/h 1 167.2 1 055.4 停车次数/[次·(veh·km)-1] 2.7 2.6 停车时间/min 144.7 112.7
下载: 导出CSV
-
[1] 严飞, 潘明阳, 曹晓东, 等. Agent技术在交通仿真中的应用[J]. 电脑开发与应用, 2003, 16(8): 31-33. doi: 10.3969/j.issn.1003-5850.2003.08.005YAN Fei, PAN Ming-yang, CAO Xiao-dong, et al. Application of agent technology in traffic simulation[J]. Computer Development and Applications, 2003, 16(8): 31-33. (in Chinese) doi: 10.3969/j.issn.1003-5850.2003.08.005 [2] 曹富禄, 苏诗琳, 蔡占华, 等. 基于多Agent技术的城市交通信号控制系统的研究[J]. 现代电子技术, 2004, 27(15): 11-12, 14. doi: 10.3969/j.issn.1004-373X.2004.15.005CAO Fu-lu, SU Shi-lin, CAI Zhan-hua, et al. Research of urban traffic signal control systembased on multi-agents technology[J]. Modern Electronics Technique, 2004, 27(15): 11-12, 14. (in Chinese) doi: 10.3969/j.issn.1004-373X.2004.15.005 [3] 申徐洲. 基于Agent的智能交通控制的研究[D]. 大庆: 大庆石油学院, 2006.SHEN Xu-zhou. Research on intelligent traffic control based on agent technology[D]. Daqing: Daqing Petroleum College, 2006. (in Chinese) [4] 孙晋文. 基于Agent的智能交通控制策略与可视化动态仿真研究[D]. 北京: 中国农业大学, 2001.SUN Jin-wen. Study on agent-based intelligent traffic control strategy and visual dynamic simulation[D]. Beijing: China Agricultural University, 2001. (in Chinese) [5] ADLER J L, SATAPATHY G, MANIKONDA V, et al. A multi-agent approach to cooperative traffic management and route guidance[J]. Transportation Research Part B: Methodological, 2005, 39(4): 297-318. doi: 10.1016/j.trb.2004.03.005 [6] 韩印. 基于多智能体的道路多交叉口信号集成控制仿真系统及信息诱导技术研究与开发应用研究报告[R]. 上海: 上海理工大学, 2009.HAN Yin. Study report on multi-intersection signal integrated control simulation systembased on agents and information guidance technology[R]. Shanghai: University of Shanghai for Science and Technology, 2009. (in Chinese) [7] 高海军, 俞国军, 李振龙. 基于Agent的城市交通信号控制[J]. 控制与决策, 2004, 19(7): 737-740. doi: 10.3321/j.issn:1001-0920.2004.07.004GAO Hai-jun, YU Guo-jun, LI Zhen-long. Agent-based urban traffic signal control[J]. Control and Decision, 2004, 19(7): 737-740. (in Chinese) doi: 10.3321/j.issn:1001-0920.2004.07.004 [8] ROOZEMOND D A. Using intelligent agents for pro-active, realtime urban intersection control[J]. European Journal of Operational Research, 2001, 131(2): 293-301. doi: 10.1016/S0377-2217(00)00129-6 [9] TAYLORJAMES C, MCKENNA P G, YOUNG P C, et al. Macroscopic traffic flow modelling and ramp metering control using MATLAB/Simulink[J]. Environmental Modelling and Software, 2004, 19(10): 975-988. doi: 10.1016/j.envsoft.2003.11.009 [10] 安实, 李静, 崔建勋. 面向多智能体的出行前信息下通勤者出行行为研究[J]. 中国公路学报, 2009, 22(3): 95-100. doi: 10.3321/j.issn:1001-7372.2009.03.017AN Shi, LI Jing, CUI Jian-xun. Research on commuter's travel behavior faced to multi-agent under pre-trip information[J]. China Journal of Highway and Transport, 2009, 22(3): 95-100. (in Chinese) doi: 10.3321/j.issn:1001-7372.2009.03.017 [11] 梁新荣, 刘志勇, 毛宗源. 高速公路入口匝道模糊控制及其仿真研究[J]. 系统仿真学报, 2005, 17(2): 444-447. doi: 10.3969/j.issn.1004-731X.2005.02.051LIANG Xin-rong, LIU Zhi-yong, MAO Zong-yuan. Fuzzy ramp control in freeway and simulation research[J]. Jourual of SystemSi mulation, 2005, 17(2): 444-447. (in Chinese) doi: 10.3969/j.issn.1004-731X.2005.02.051 [12] 臧利林, 贾磊. 城市交通智能控制优化算法[J]. 中国公路学报, 2006, 19(6): 97-101. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200606018.htmZANG Li-lin, JIA Lei. Urban traffic intelligent control optimization algorithm[J]. China Journal of Highway and Transport, 2006, 19(6): 97-101. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200606018.htm [13] 吕斌, 牛惠民. 随机条件下单点交叉口信号配时优化[J]. 交通运输工程学报, 2010, 10(6): 116-120. http://transport.chd.edu.cn/article/id/201006019LU Bin, NIU Hui-min. Signal timing opti mization at isolated intersections under random condition[J]. Journal of Traffic and Transportation Engineering, 2010, 10(6): 116-120. (in Chinese) http://transport.chd.edu.cn/article/id/201006019 [14] 韩印, 张楠, 马万达, 等. 右转车辆穿越行人流的延误模型[J]. 交通运输工程学报, 2010, 10(6): 121-126. http://transport.chd.edu.cn/article/id/201006020HAN Yin, ZHANG Nan, MA Wan-da, et al. Delay models of right-turning vehicle crossing through pedestrian flow[J]. Journal of Traffic and Transportation Engineering, 2010, 10(6): 121-126. (in Chinese) http://transport.chd.edu.cn/article/id/201006020 -


计量
- 文章访问数: 1173
- HTML全文浏览量: 305
- PDF下载量: 548
- 被引次数: 0
