

3D reconstruction of train accident scene based on monocular image
Article Text (Baidu Translation)
-
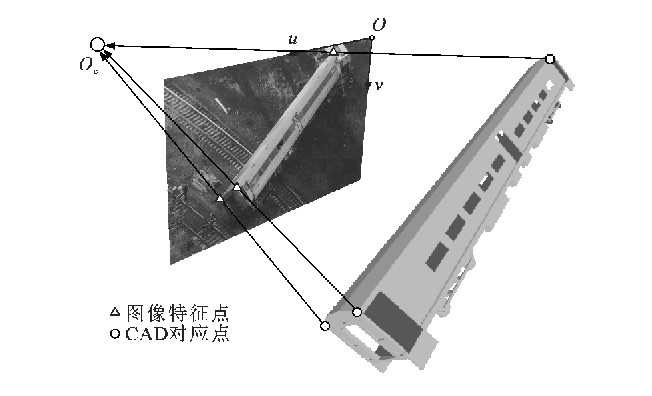
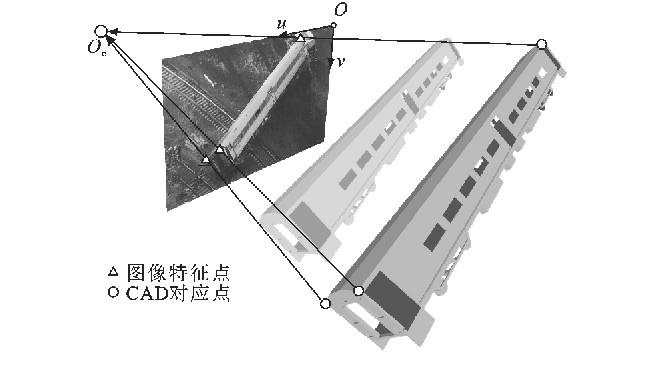
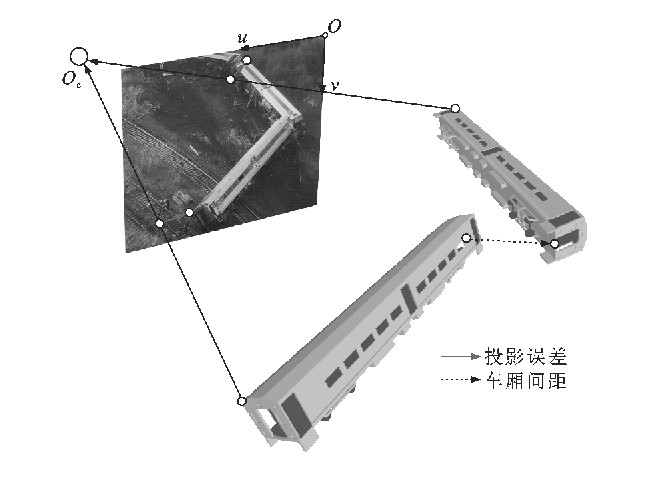
摘要: 为了辅助铁路事故应急救援方案的制定, 提出了一种基于单目图像的列车事故场景快速三维重建方法。考虑不同应用场景的2种相机投影模型, 采用SIFT算法提取图像特征并与事故列车的CAD模型相匹配, 通过引入车厢之间的几何约束, 将三维重建转换为求解带约束的非线性最小二乘问题, 最终还原事故主体的位置与姿态。为了定量与定性验证该方法的计算效果, 分别对模拟列车事故场景与真实列车事故场景进行车厢的三维重建。在模拟列车事故场景中采用了较精确的有限相机投影模型进行离线标定, 在真实列车事故场景中采用了较稳定的针孔模型进行自标定。分析结果表明: 通过对模拟场景的定量分析, 重建两节车厢中用于测量的8个节点的最大相对误差为4.54%, 平均相对误差为1.85%;通过对真实场景的定性分析, 结合地形信息校正, 同样能够实现车厢位置与姿态的三维还原; 最终借助三维可视化引擎, 可在视觉上还原整个事故环境全貌。该方法还可用于应急救援电子沙盘的开发以进行铁路事故分析和安全教育。Abstract: To help with making an emergency rescue plan for train accidents, a rapid 3D reconstruction method of train accident scene based on a monocular image was proposed.Taking two camera projection models for different application scenarios into consideration, the SIFT algorithm was introduced to extract and match image feature with the CAD model of an accident train.Geometric constraints between vehicles were provided to transform the 3D reconstruction to solving a nonlinear least square problem with constraints, by which the position and pose of accident subjects were reduced at last.To quantitatively and qualitatively verify the calculation performance of the method, the mimicked train accident scene and the real train accident scene were respectively used to carry out 3D reconstruction.The precise finite camera projection model was applied in the mimicked train accident scene to carry out offline calibration, and the stable pin-hole model was adopted in the real train accident scene to carry out auto calibration.Analysisresult shows that through quantitative analysis of mimicked scene, the maximal and average relative error of 8 nodes for measurement in reconstructing two vehicles are 4.54% and 1.85% respectively.Through qualitative analysis of real scene, the 3D reduction of position and pose for vehicles can also be realized by combining the topographic information correction.The whole accident environmental panorama reduces visually with the help of 3D visualization engine.
-

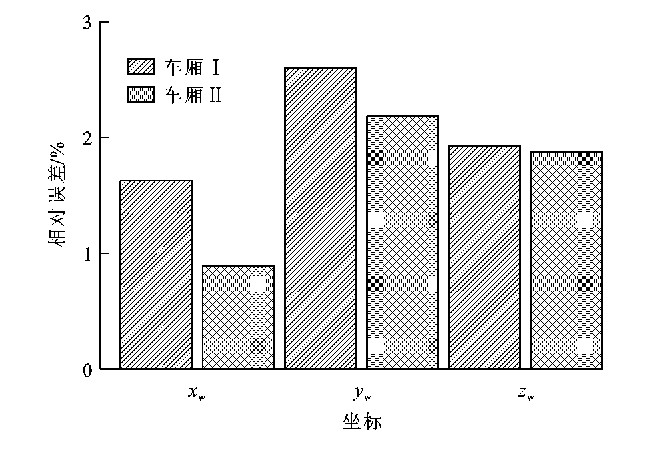
图 11 各方向下不同车厢的平均相对误差
Figure 11. Average relative errors from different carriages for each direction

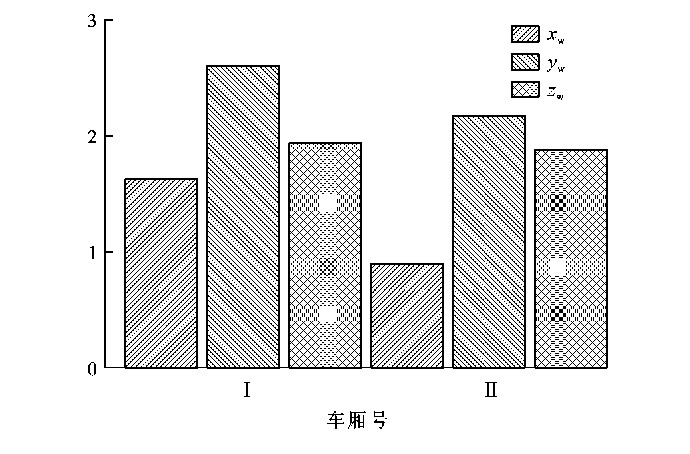
图 12 各车厢不同方向下的平均相对误差
Figure 12. Average relative errors from different directions for each carriage
-
[1] SMILEY A M. The hinton train disaster[J]. Accident Analysis and Prevention, 1990, 22 (5): 443-455. doi: 10.1016/0001-4575(90)90039-N [2] WU Yan-han, WANG Fu-zhang. Research on location and optimization of railway emergency rescue center[C]//IEEE. 2011 2nd IEEE International Conference on Emergency Management and Management Sciences. New York: IEEE, 2011: 330-333. [3] HOU Lin, LAO Yun-teng, WANG Yin-hai, et al. Modeling freeway incident response time: a mechanism-based approach[J]. Transportation Research Part C: Emerging Technologies, 2013, 28 (3): 87-100. [4] LI Ying, TRINH H, HAAS N, et al. Rail component detection, optimization, and assessment for automatic rail track inspection[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15 (2): 760-770. doi: 10.1109/TITS.2013.2287155 [5] GIBERT X, PATEL V M, CHELLAPPA R. Robust fastener detection for autonomous visual railway track inspection[C]//IEEE. 2015 IEEE Winter Conference on Applications of Computer Vision. New York: IEEE, 2015: 694-701. [6] 闵永智, 殷超, 党建武, 等. 基于图像色相值突变特征的钢轨区域快速识别方法[J]. 交通运输工程学报, 2016, 16 (1): 46-54. http://transport.chd.edu.cn/article/id/201601006MIN Yong-zhi, YIN Chao, DANG Jian-wu, et al. Fast recognition method of rail region based on hue value mutation feature of image[J]. Journal of Traffic and Transportation Engineering, 2016, 16 (1): 46-54. (in Chinese). http://transport.chd.edu.cn/article/id/201601006 [7] TAŞTIMUR C, AKIN E, KARAKÖSE M, et al. Detection of rail faults using morphological feature extraction based image processing[C]//IEEE. 2015 23th Signal Processing and Communications Applications Conference. New York: IEEE, 2015: 1244-1247. [8] RESENDIZ E, HART J M, AHUJA N. Automated visual inspection of railroad tracks[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14 (2): 751-760. doi: 10.1109/TITS.2012.2236555 [9] CAMARGO L F M, EDWARDS J R, BARKAN C P L. Emerging condition monitoring technologies for railway track components and special trackwork[C]//IEEE. 2011ASME/ASCE/IEEE Joint Rail Conference. New York: IEEE, 2011: 151-158. [10] 廖军洪, 刘仍奎. 基于GIS的铁路行车事故救援系统研究[J]. 中国安全科学学报, 2003, 13 (11): 5-8. https://www.cnki.com.cn/Article/CJFDTOTAL-ZAQK200311001.htmLIAO Jun-hong, LIU Reng-kui. Study on emergency rescue system for accidents of running train based on GIS[J]. China Safety Science Journal, 2003, 13 (11): 5-8. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZAQK200311001.htm [11] 王东亮. 接触网下内电机车客货车辆快速救援起复方法[J]. 铁道机车车辆, 2009, 29 (5): 84-87. https://www.cnki.com.cn/Article/CJFDTOTAL-TDJC200905028.htmWANG Dong-liang. Diesel and electric locomotive, coach and lorry car rapid rescue recovery method under contact line[J]. Railway Locomotive and Car, 2009, 29 (5): 84-87. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-TDJC200905028.htm [12] MOHR R, TRIGGS B. Projective geometry for image analysis[R]. Vienna: ISPRS, 1996. [13] KOLB C, MITCHELL D, HANRAHAN P. A realistic camera model for computer graphics[C]//ACM. Proceedings of the 22nd Annual Conference on Computer Graphics and Interactive Techniques. New York: ACM, 1995: 317-324. [14] HEIKKILJ, SILVN O. A four-step camera calibration procedure with implicit image correction[C]//IEEE. 1997IEEE Computer Society Conference on Computer Vision and Pattern Recognition. New York: IEEE, 1997: 1106-1112. [15] ZHANG Zheng-you. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22 (11): 1330-1334. doi: 10.1109/34.888718 [16] SANTAGATI C, INZERILLO L. 123Dcatch: efficiency, accuracy, constraints and limitations in architectural heritage field[J]. International Journal of Heritage in the Digital Era, 2013, 2 (2): 263-289. doi: 10.1260/2047-4970.2.2.263 [17] TORR P H S, ZISSERMAN A. Feature based methods for structure and motion estimation[J]. Lecture Notes in Computer Science, 2002, 1883: 278-294. [18] BROWN M, LOWE D G. Automatic panoramic image stitching using invariant features[J]. International Journal of Computer Vision, 2007, 74 (1): 59-73. doi: 10.1007/s11263-006-0002-3 [19] BROWN M, LOWE D G. Recognising panoramas[C]//IEEE. Ninth IEEE International Conference on Computer Vision. New York: IEEE, 2003: 1218-1227. [20] LOWE D G. Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004, 60 (2): 91-110. doi: 10.1023/B:VISI.0000029664.99615.94 [21] JUAN L, GWUN O. A comparison of SIFT, PCA-SIFT and SURF[J]. International Journal of Image Processing, 2009, 3 (4): 143-152. [22] FISCHLER M A, BOLLES R C. Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography[J]. Communications of the ACM, 1981, 24 (6): 381-395. [23] TRIGGS B, MCLAUCHLAN P, HARTLEY R, et al. Bundle adjustment—a modern synthesis[J]. Lecture Notes in Computer Science, 2002, 1883: 298-372. [24] MORJ J, SORENSEN D C. Computing a trust region step[J]. SIAM Journal on Scientific and Statistical Computing, 1983, 4 (3): 553-572. [25] HEIKKILJ, SILVN O. Calibration procedure for short focal length off-the-shelf CCD-cameras[C]//IEEE. Proceedings of13th International Conference on Pattern Recognition. New York: IEEE, 1996: 166-170. -

 下载:
下载:




图(18) / 表(3)
计量
- 文章访问数: 1420
- HTML全文浏览量: 441
- PDF下载量: 689
- 被引次数: 0
