

Longitudinal and lateral coupling control for lane change
Article Text (Baidu Translation)
-
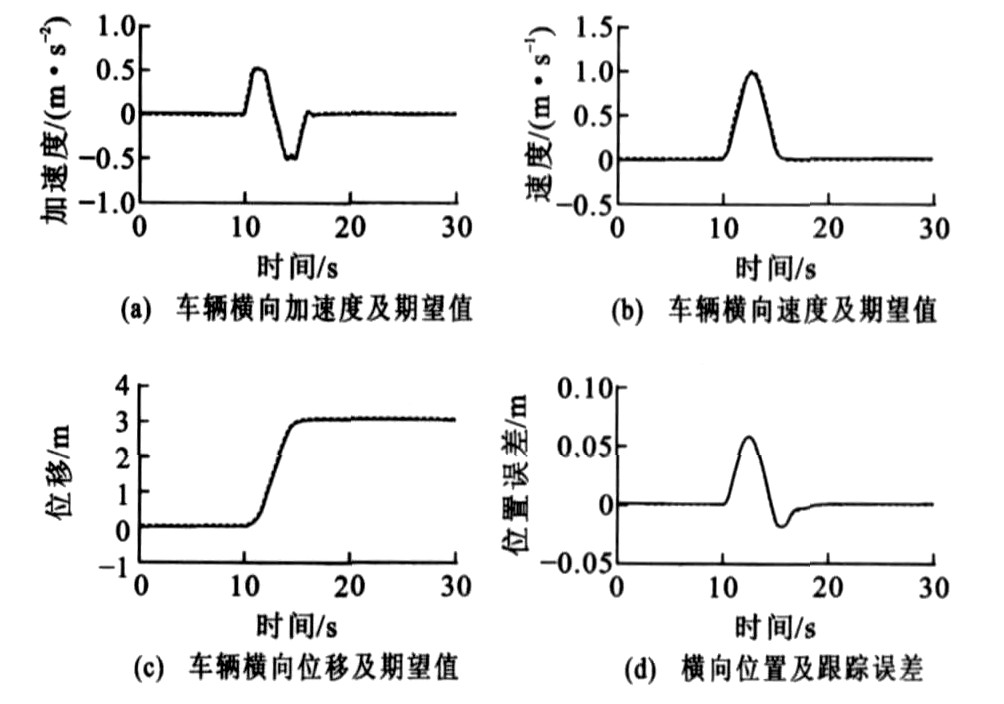
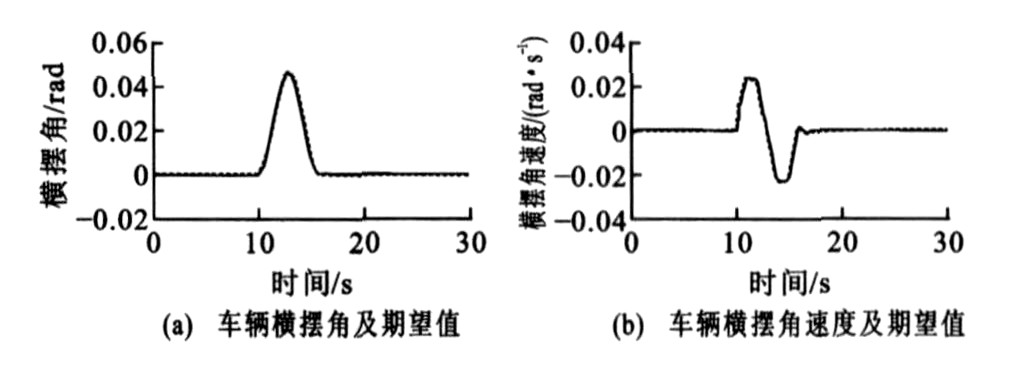
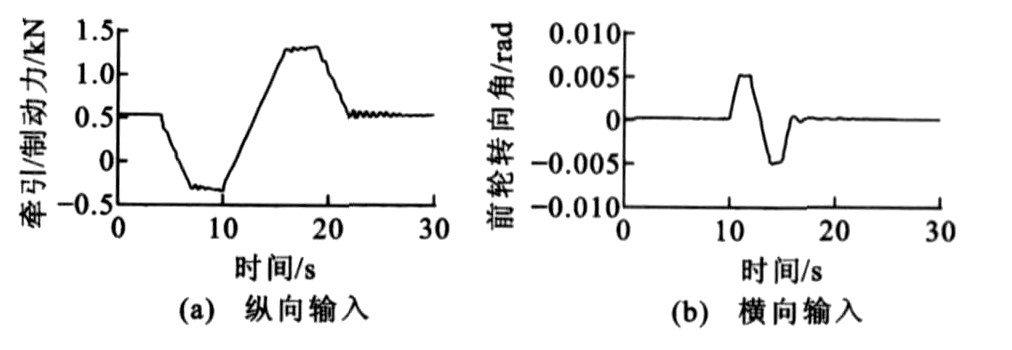
摘要: 基于车辆纵横向动力学耦合模型, 研究了自动化公路系统车辆换道纵横向耦合控制。假定换道过程中车辆横向加速度满足梯形约束, 根据期望换道轨迹计算车辆换道时的期望横摆角和横摆角速度, 依靠车载传感器获得车辆横摆角速度信息。采用有限时间滑模趋近律, 设计了车辆换道纵横向耦合变结构控制规律。基于李雅普诺夫稳定性理论, 对控制系统的稳定性进行了分析, 得到了系统渐进稳定的充分条件。仿真结果表明: 采用该控制规律, 车辆在纵向速度变化的情况下能够良好地跟踪期望换道轨迹, 跟踪误差小于0.06 m。Abstract: Based on vehicle longitudinal and lateral coupling dynamics model, the integrated longitudinal and lateral control for lane change in automated highway system was studied.Assuming the lateral acceleration meeted trapezoidal constraint, the desired yaw angle and yaw rate for lane change were derived by predetermined virtual trajectory, and the data of yaw rate can be measured with onboard sensors.With finite time sliding mode reaching law, the coupled lane change variable structure control law was designed.The stability of the control system was analyzed by using Lyapunov function method, and the sufficient condition ensuring the asymptotic stability of the control system was obtained.Simulation result shows that based on the proposed control law, vehicle has good track performance under various longitudinal velocities, and the track error is less than 0.06 m.
-
Key words:
- traffic control /
- lane change /
- vehicle following /
- variable structure control
-
[1] 陈斌, 魏朗. 高速公路意外事件影响下的车辆跟驰模型[J]. 交通运输工程学报, 2006, 6(3): 103-108. http://transport.chd.edu.cn/article/id/200603022CHEN Bin, WEI Lang. Car-following model under influenceof expressway accident[J]. Journal of Traffic and Transpor-tation Engineering, 2006, 6(3): 103-108. (in Chinese) http://transport.chd.edu.cn/article/id/200603022 [2] RAJAMANI R, TAN HS, LAWB K, et al. Demonstrationof integrated longitudinal andlateral control for the operationof automated vehicles in platoons[J]. IEEE Transactions onControl Systems Technology, 2000, 8(4): 695-708. doi: 10.1109/87.852914 [3] 游峰. 智能车辆自动换道与自动超车控制方法的研究[D]. 长春: 吉林大学, 2005.YOU Feng. Study on autonomous lane-changing and autono-mous overtaking control method of intelligent vehicle[D]. Changchun: Jilin Uinversity, 2005. (in Chinese) [4] TAN H S, GULDNER J, CHEN C, et al. Lane changingwith look-down reference systems on automated highways[J]. Control Engineering Practice, 2000, 8(9): 1033-1043. doi: 10.1016/S0967-0661(00)00026-5 [5] HATIPOGLU C, OZGUNER U, REDMILL K A, et al. Auto-mated lane change controller design[J]. IEEE Transactions onIntelligent Transportation Systems, 2003, 4(1): 13-22. doi: 10.1109/TITS.2003.811644 [6] HEDRICKJ K, SWAROOP D. Dynamic couplingin vehiclesunder automatic control[J]. Vehicle System Dynamics, 1994, 23(S1): 209-220. [7] 李以农, 杨柳, 郑玲, 等. 基于滑模控制的车辆纵横向耦合控制[J]. 中国机械工程, 2007, 18(7): 866-870. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX200707026.htmLI Yi-nong, YANG Liu, ZHENG Ling, et al. Vehicle longi-tudinal and lateral coupling control based on sliding modecontrol[J]. China Mechanical Engineering, 2007, 18(7): 866-870. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX200707026.htm [8] 赵成, 胡增荣, 陈大跃. 半主动悬架的滑模变结构控制[J]. 中国公路学报, 2007, 20(3): 109-114. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200703019.htmZHAO Cheng, HUZeng-rong, CHEN Da-yue. Sliding modevarying structure control for semi-active suspension[J]. China Journal of Highway and Transport, 2007, 20(3): 109-114. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200703019.htm [9] ZHANG J R, XU S J. Nonlinear observer design for auto-matic steering of vehicles[C]//IEEE. Proceedings of Interna-tional Conference on Intelligent Transportation Systems. Sin-gapore: IEEE, 2002: 179-182. -

 下载:
下载:



图(4) / 表(2)
计量
- 文章访问数: 577
- HTML全文浏览量: 162
- PDF下载量: 737
- 被引次数: 0
