

Development trends of waterway transportation technology
Article Text (Baidu Translation)
-
摘要: 对水路交通技术趋势相关文献开展文献计量分析,从主要研究国家、作者与关键词等方面梳理了研究脉络;综合国内外水路交通发展指导政策、前瞻报告与典型案例,分析并总结了水路交通技术发展现状,研判了未来水路交通技术发展趋势。研究结果表明: 水路交通技术将朝着以下5个方向发展。在水路运载工具方面,运输船舶逐步少人化,内河、近海、深远海船舶发展趋于谱系化;在航运基础设施方面,航道设施、能源供给、信息网络发展趋于一体化,并且船岸协同能力增强,船舶远程操控可实现,岸基船舶控制中心建设成为水运基础设施重要组成部分;在船舶动力方面,日趋严格的减排目标推动船用清洁能源发展,船舶动力系统将呈现多能源化和电动化;在船舶航行方面,多船协同运输可提高运输效率,内河、近海船舶编队航行成为运输新模式;在海事监管与安全方面,智能系统的应用使船舶人因事故逐步降低,智能无人系统救援成为现实。研究成果可以有效指导水路交通系统的未来规划、设计、建设与应用,为培育和发展水运新业态,逐步实现未来新一代航运系统提供有力支撑。Abstract: A bibliometric analysis of literatures related to waterway transportation technology trends was carried out to sort out the research lineage in terms of major research countries, authors and keywords. The current development of waterway transportation technology was analyzed and summarized by comprehensively studying guiding policies, forward-looking reports and typical cases of waterway transportation development both in China and abroad, and the future development trend of waterway transportation technology was judged. Research results show that waterway transportation technology will develop in the following five directions. In terms of waterway carriers, transport vessels will gradually require less manpower, and inland river, offshore and deep-sea vessels will form a spectrum. In terms of shipping infrastructure, the waterway facilities, energy supply, and information networks will be integrated. The ship-shore collaboration ability will be strengthened, the ship remote control can be realized, and the construction of shore-based ship control centre will become an important part of waterway transport infrastructure. In terms of ship power, increasingly stringent emission reduction targets will promote the development of ship clean energy, and the ship power system will be driven by multi-diversified energy and electricity. In terms of ship navigation, multi-ship cooperative transportation can improve transportation efficiency, and the inland river and offshore ship formation navigation becomes a new mode of transportation. In terms of maritime supervision and safety, the application of intelligent system makes ship human-caused accidents gradually reduce, and intelligent unmanned system rescue becomes a reality. The research results can effectively guide the future planning, design, construction and application of waterway transportation system, and provide strong support for cultivating and developing new waterway transportation industry and gradually realizing the future new generation shipping system.
-

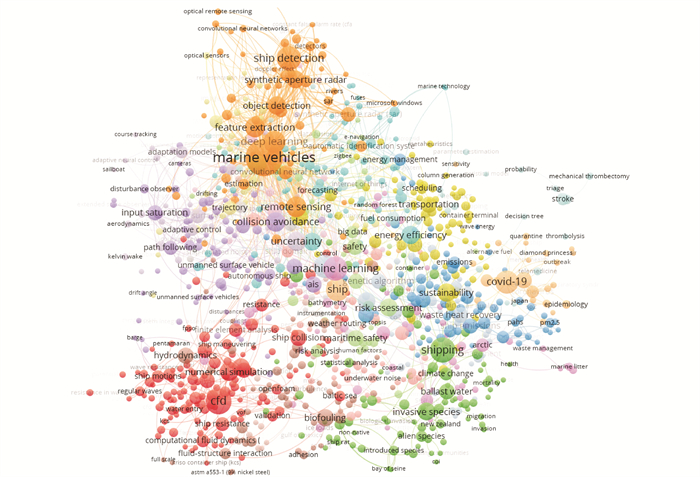
图 1 水路交通技术文献的可视化图谱
Figure 1. Visualization map of literatures on waterway transportation technology

图 2 水路交通技术主要研究国家共现图谱
Figure 2. Co-occurrence map of major research countries on waterway transportation technology

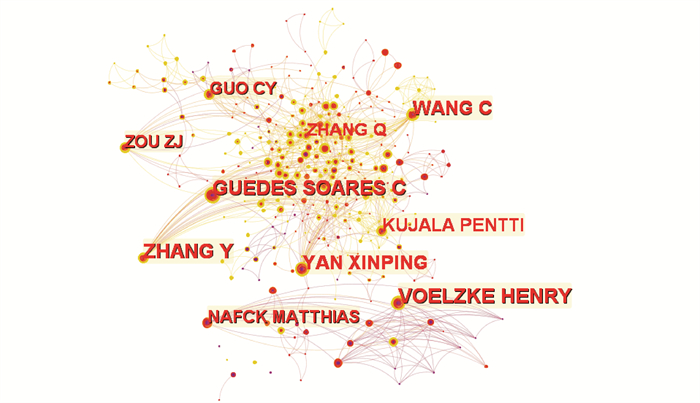
图 3 水路交通技术前10位作者共现图谱
Figure 3. Co-occurrence map of top 10 authors on waterway transportation technology
-
[1] 严新平. 智能船舶的研究现状与发展趋势[J]. 交通与港航, 2016(1): 25-28. doi: 10.3969/j.issn.1001-599X.2016.01.006YAN Xin-ping. Research status and development trends of intelligent ships[J]. Communication and Shipping, 2016(1): 25-28. (in Chinese) doi: 10.3969/j.issn.1001-599X.2016.01.006 [2] 杨邦杰, 严以新, 安雪晖. 长江流域"黄金水道"问题分析及对策建议[J]. 中国发展, 2015, 15(1): 1-7. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGFZ201501002.htmYANG Bang-jie, YAN Yi-xin, AN Xue-hui. Analyses and Policy Recommendations on the Yangtze Golden Waterway[J]. China Development, 2015, 15(1): 1-7. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGFZ201501002.htm [3] FAN Ai-long, WANG Jun-teng, HE Ya-peng, et al. Decarbonising inland ship power system: alternative solution and assessment method[J]. Energy, 2021, 226: 120266. doi: 10.1016/j.energy.2021.120266 [4] JENS U S H, DONG W S, FONSECA T, et al. Transport 2040: automation, technology, employment—the future of work[R]. Malmo: World Maritime University, 2019. [5] 交通运输部, 中央网信办, 国家发展改革委, 等. 智能航运发展指导意见[R]. 北京: 交通运输部, 2019.Ministry of Transport of the People's Republic of China, Cyberspace Administration of China, National Development and Reform Commission, et al. Instruction on the development of smart shipping[R]. Beijing: Ministry of Transport of the People's Republic of China, 2019. (in Chinese) [6] 周翔宇, 吴兆麟, 王凤武, 等. 自主船舶的定义及其自主水平的界定[J]. 交通运输工程学报, 2019, 19(6): 149-162. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201906016.htmZHOU Xiang-yu, WU Zhao-lin, WANG Feng-wu, et al. Definition of autonomous ship and its autonomy level[J]. Journal of Traffic and Transportation Engineering, 2019, 19(6): 149-162. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201906016.htm [7] 李文华, 张君彦, 林珊颖, 等. 水面自主船舶技术发展路径[J]. 船舶工程, 2019, 41(7): 64-73. https://www.cnki.com.cn/Article/CJFDTOTAL-CANB201907016.htmLI Wen-hua, ZHANG Jun-yan, LIN Shan-ying, et al. The development path of maritime autonomous surface ships technology[J]. Ship Engineering, 2019, 41(7): 64-73. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-CANB201907016.htm [8] 曾晓光. 智能船舶发展新态势[J]. 中国船检, 2018(1): 43-45. doi: 10.3969/j.issn.1009-2005.2018.01.010ZENG Xiao-guang. New trends in the development of smart ships[J]. China Ship Survey, 2018(1): 43-45. (in Chinese) doi: 10.3969/j.issn.1009-2005.2018.01.010 [9] 严新平, 刘佳仑, 范爱龙, 等. 智能船舶技术发展与趋势简述[J]. 船舶工程, 2020, 42(3): 15-20. https://www.cnki.com.cn/Article/CJFDTOTAL-CANB202003008.htmYAN Xin-ping, LIU Jia-lun, FAN Ai-long, et al. Brief introduction of the development and trend of smart ship technology[J]. Ship Engineering, 2020, 42(3): 15-20. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-CANB202003008.htm [10] 沈新琴. 分析数字航道技术在内河航道管理中的应用[J]. 中国水运, 2014, 14(7): 92-93. https://www.cnki.com.cn/Article/CJFDTOTAL-ZSUX201407039.htmSHEN Xin-qin. Application analysis of digital waterway technology in inland waterway management[J]. China Water Transport, 2014, 14(7): 92-93. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZSUX201407039.htm [11] 范爱龙, 贺亚鹏, 严新平, 等. 智能新能源船舶的概念及关键技术[J]. 船舶工程, 2020, 42(3): 9-14. https://www.cnki.com.cn/Article/CJFDTOTAL-CANB202003013.htmFAN Ai-long, HE Ya-peng, YAN Xin-ping, et al. Concept and key technologies of intelligent new energy ship[J]. Ship Engineering, 2020, 42(3): 9-14. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-CANB202003013.htm [12] Department for Transport(UK). Maritime 2050: navigating the future[R]. London: Department for Transport(UK), 2019. [13] VOJKOVI AC'G G, MILENKOVI AC'G M. Autonomous ships and legal authorities of the ship master[J]. Case Studies on Transport Policy, 2020, 8(2): 333-340. [14] DNV·GL. Maritime forecast to 2050[R]. Norway: DNV·GL, 2019. [15] RAFIEI M, BOUDJADAR J, KHOOBAN M H. Energy management of a zero-emission ferry boat with a fuel cell-based hybrid energy system: feasibility assessment[J]. IEEE Transactions on Industrial Electronics, 2021, 68(2): 1739-1748. [16] YUAN Yu-peng, WANG Ji-xiang, YAN Xin-ping, et al. A review of multi-energy hybrid power system for ships[J]. Renewable and Sustainable Energy Reviews, 2020, 132: 110081. [17] 蒋仲廉, 初秀民, 严新平. 智能水运的发展现状与展望——第十届中国智能交通年会《水路交通智能化论坛》综述[J]. 交通信息与安全, 2015, 33(6): 1-8. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201506001.htmJIANG Zhong-lian, CHU Xiu-min, YAN Xin-ping. Developments and prospects of intelligent water transport: a review of the symposium on intelligent water transport, in conjunction with the 10th annual meeting of China ITS[J]. Journal of Transport Information and Safety, 2015, 33(6): 1-8. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201506001.htm [18] CHEN Lin-ying, HUANG Ya-min, ZHENG Hua-rong, et al. Cooperative multi-vessel systems in urban waterway networks[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(8): 3294-3307. [19] CHEN L Y, HOPMAN H, NEGENBORN R R. Distributed model predictive control for vessel train formations of cooperative multi-vessel systems[J]. Transportation Research Part C: Emerging Technologies, 2018, 92: 101-118. [20] CURCIO J, LEONARD J, PATRIKALAKIS A. SCOUT— a low cost autonomous surface platform for research in cooperative autonomy[C]//IEEE. 2005 Proceedings of MTS/IEEE OCEANS. New York: IEEE, 2005: 725-729. [21] 马天宇, 杨松林, 王涛涛, 等. 多USV协同系统研究现状与发展概述[J]. 舰船科学技术, 2014, 36(6): 7-13. https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201406003.htmMA Tian-yu, YANG Song-lin, WANG Tao-tao, et al. An outline of current status and development of the multiple USV cooperation system[J]. Ship Science and Technology, 2014, 36(6): 7-13. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201406003.htm [22] 顾颖闽. 水面无人艇艇群技术发展概述[J]. 舰船科学技术, 2019, 41(23): 35-38. https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201923009.htmGU Ying-min. Overview of technology development of the USV group[J]. Ship Science and Technology, 2019, 41(23): 35-38. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201923009.htm [23] European Maritime Safety Agency. Annual overview of marine casualties and incidents 2018[R]. Lisbon: European Maritime Safety Agency, 2018. [24] 范诗琪, 严新平, 张金奋, 等. 水上交通事故中人为因素研究综述[J]. 交通信息与安全, 2017, 35(2): 1-8. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201702001.htmFAN Shi-qi, YAN Xin-ping, ZHANG Jin-fen, et al. A review on human factors in maritime accidents[J]. Journal of Transport Information and Safety, 2017, 35(2): 1-8. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201702001.htm [25] ROBINSON B H. The coevolution of undersea vehicles and deep-sea research[J]. Marine Technology Society Journal, 1999, 33(4): 65-73. [26] 沈克, 严允, 晏红文. 我国深海作业级ROV技术现状及发展展望[J]. 控制与信息技术, 2020(3): 1-7. https://www.cnki.com.cn/Article/CJFDTOTAL-BLJS202003001.htmSHEN Ke, YAN Yun, YAN Hong-wen. Research status and development trend of deep-sea work class ROV in China[J]. Control and Information Technology, 2020(3): 1-7. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-BLJS202003001.htm [27] 余明刚, 张旭, 陈宗恒. 自治水下机器人技术综述[J]. 机电工程技术, 2017, 46(8): 155-157. https://www.cnki.com.cn/Article/CJFDTOTAL-JXKF201708048.htmYU Ming-gang, ZHANG Xu, CHEN Zong-heng. Summary of autonomous underwater vehicle(AUV) technology[J]. Mechanical and Electrical Engineering Technology, 2017, 46(8): 155-157. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXKF201708048.htm [28] 曹俊, 胡震, 刘涛, 等. 深海潜水器装备体系现状及发展分析[J]. 中国造船, 2020, 61(1): 204-218. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGZC202001021.htmCAO Jun, HU Zhen, LIU Tao, et al. Current Situation and development of deep-sea submersible equipment[J]. Shipbuilding of China, 2020, 61(1): 204-218. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGZC202001021.htm [29] 庞硕, 纠海峰. 智能水下机器人研究进展[J]. 科技导报, 2015, 33(23): 66-71. https://www.cnki.com.cn/Article/CJFDTOTAL-KJDB201523033.htmPANG Shuo, JIU Hai-feng. Current status of autonomous underwater vehicles research and development[J]Science and Technology Review, 2015, 33(23): 66-71. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KJDB201523033.htm [30] TEAGUE J, ALLEN M J, SCOTT T B. The potential of low-cost ROV for use in deep-sea mineral, ore prospecting and monitoring[J]. Ocean Engineering, 2018, 147: 333-339. -

 下载:
下载:


 点击查看大图
点击查看大图
图(6)
计量
- 文章访问数: 3285
- HTML全文浏览量: 867
- PDF下载量: 503
- 被引次数: 0
