

-
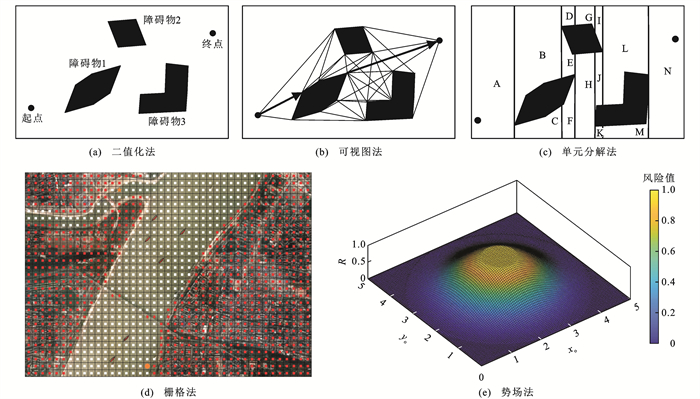
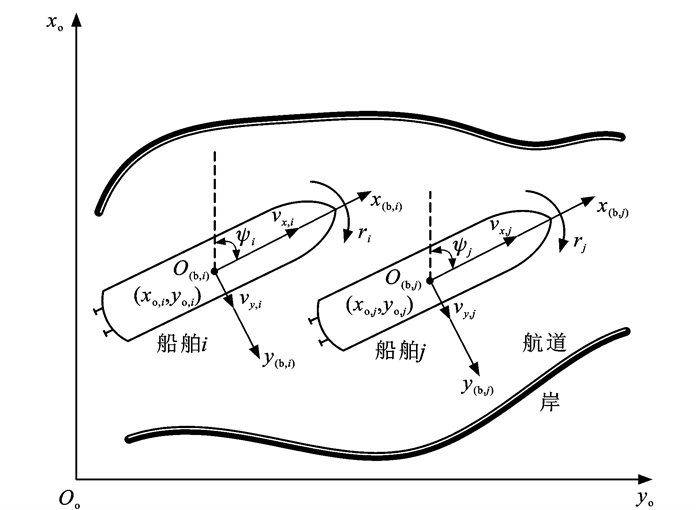
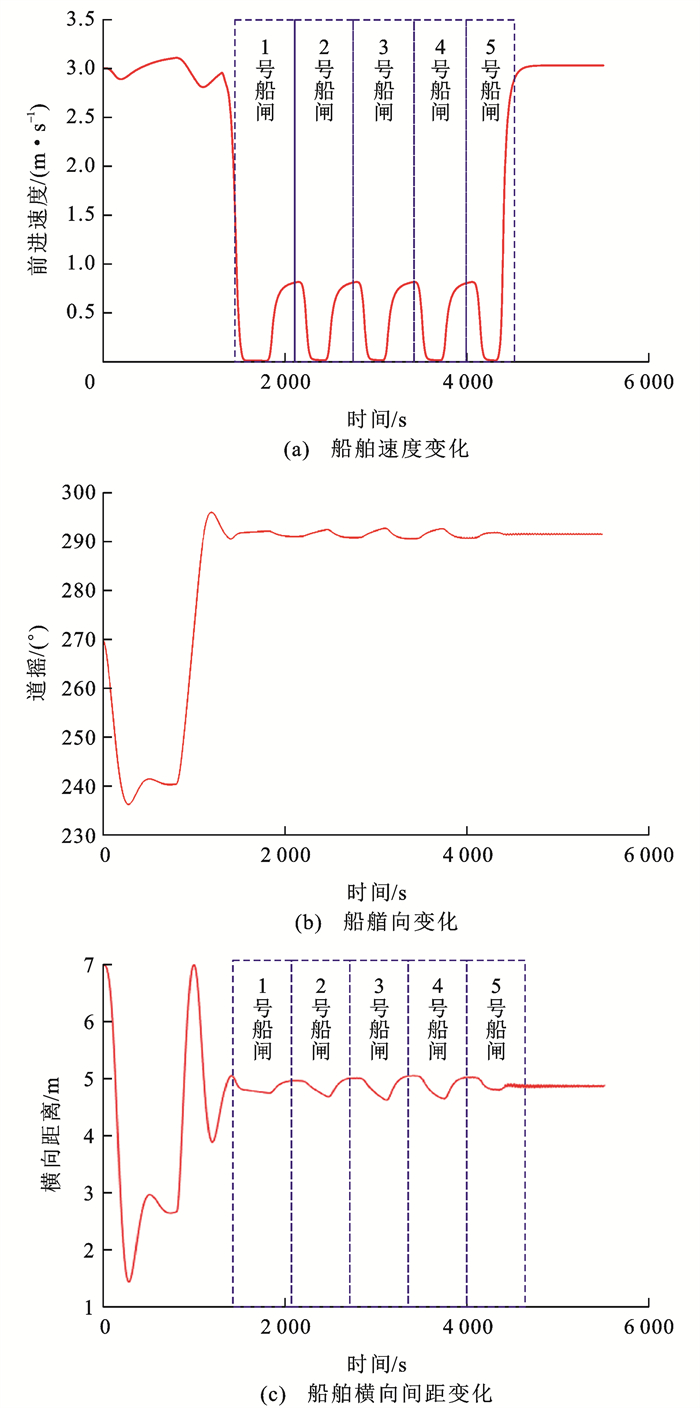
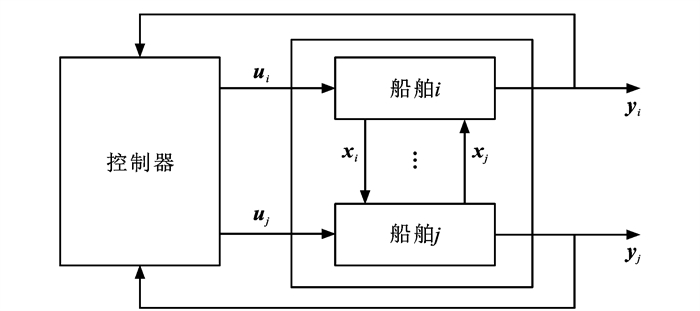
摘要: 研究了船舶编队控制的特点,从船舶编队控制结构、编队路径规划、编队运动建模和编队运动控制4个方面分别对现状和方法进行分析;介绍了船舶编队控制原理,描述了船舶编队领导-跟随结构、虚拟结构、图论结构、基于行为结构的数学表示方法及应用场景;针对船舶编队路径规划,总结了编队环境建模、全局路径规划和局部避碰规划等最新方法及其特点,展示了基于粒子群优化算法的船舶编队局部避碰效果;针对船舶编队控制运动建模,构建了考虑干扰、控制时延和约束的船舶编队水动力模型,并将该模型在船舶编队过闸控制场景中进行了验证;针对船舶编队运动控制,归纳了典型集中式、分散式和分布式编队控制器特点,指出分布式编队控制器具有更好的鲁棒性和可扩展性,设计了基于分布式模型预测控制的编队航行控制器。研究结果表明:目前船舶编队控制技术瓶颈主要体现在有人/无人编队共融、岸端驾控为主的内河船舶编队控制、不确定干扰下的船舶编队控制、通信受限下船舶编队鲁棒控制、特殊水域船舶编队控制和船舶编队控制一致性等方面;在未来船舶编队发展中,应重点解决船舶编队分布式协同控制、船舶编队任务多元化控制、基于生物群体机制的船舶编队控制、特殊水域船舶编队控制、人工智能技术在船舶编队控制中的应用等问题。Abstract: The characteristics of ship formation control were studied, and its current situation and methods were analyzed from the aspects of the structure of ship formation control, formation path planning, formation motion modeling, and formation motion control. The principle of ship formation control was introduced, and the mathematical representation methods and application scenarios of leader-follower structure, virtual structure, graph theory structure, and behavior-based structure of ship formations were described. For the path planning of ship formations, the latest methods and characteristics of formation environment modeling, global path planning, and local collision avoidance planning were summarized, and the local collision avoidance effect of ship formations based on the particle swarm optimization algorithm was demonstrated. For the motion modeling of ship formation control, a hydrodynamic model of ship formations considering the disturbance, control delay, and constraints was built and verified in the contral scenario of a ship formation passing through the lock waterway. For the motion control of ship formations, the characteristics of typical centralized, decentralized, and distributed formation controllers were summarized. It was pointed out that the distributed formation controller had better robustness and scalability, and hence, a formation navigation controller based on the distributed model predictive control was designed. Analysis results show that the technical bottleneck of ship formation control is mainly reflected in the aspects such as the integration of manned/unmanned formations, inland ship formation control mainly based on shore-side driving and control, ship formation control under uncertain disturbances, robust ship formation control under communication constraints, ship formation control in special waters, and consistency of ship formation control. In the future development of ship formations, the following key problems should be addressed: distributed collaborative control of ship formations, diversified control of ship formation tasks, ship formation control based on the biological group mechanism, ship formation control in special waters, and application of artificial intelligence technology in ship formation control.
-

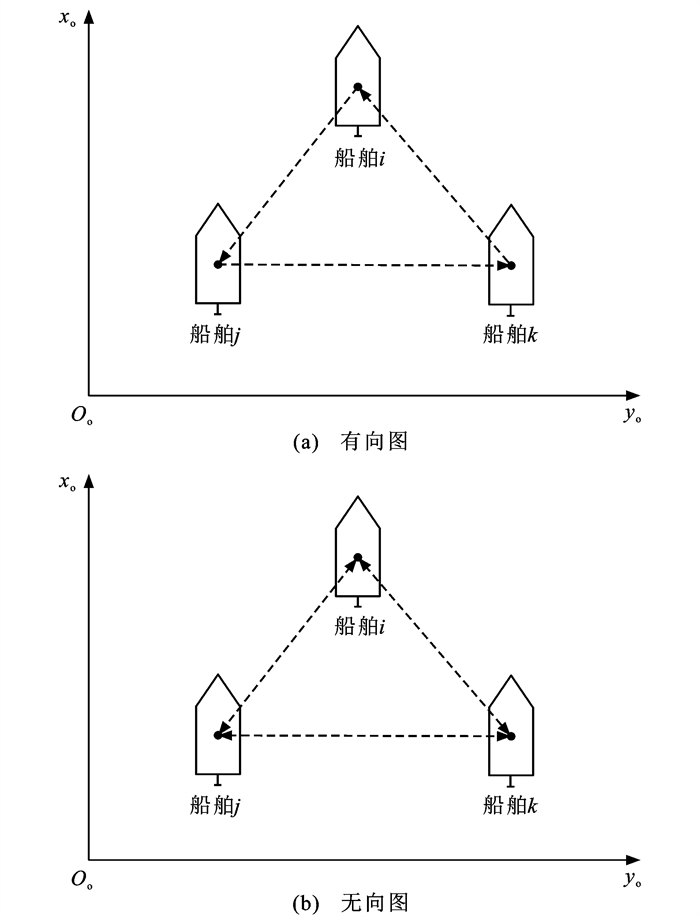
图 4 有向图与无向图船舶编队结构
Figure 4. Directed graph and undirected graph based ship formation structures

图 9 基于粒子群优化的船舶编队避碰路径
Figure 9. Anti-collision path of ship formation based on particle swarm optimization

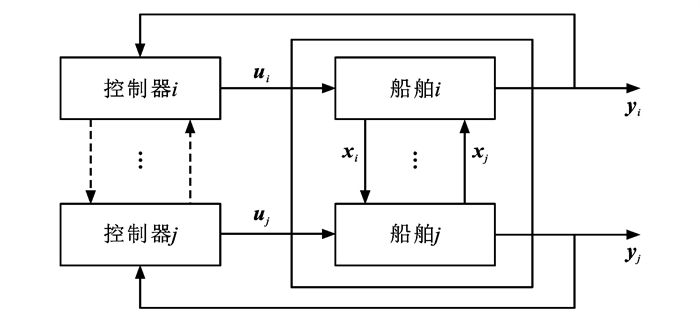
图 15 船舶编队分布式模型预测控制器设计
Figure 15. Design for distributed model predictive controller of ship formation
表 1 不同船舶编队控制结构特点
Table 1. Features of different ship formation control structures
编队控制结构 优点 缺点 文献 领导-跟随结构 简单,易实现 领航者与跟随者之间相互独立,难以获得跟随者的跟踪反馈 [26]~[33] 虚拟结构 可将编队误差作为反馈引入控制器,具有较好的控制稳定性和全局收敛性 编队灵活性和自适应性较弱,不适用于复杂队形控制 [12]、[35]~[39] 基于行为结构 可将复杂编队任务进行分解,自适应能力强 编队不同对象行为可能存在冲突,难以从数学角度进行定量分析,编队控制稳定性不高 [40]~[45] 图论结构 可描述复杂的编队结构,有利于解决大规模编队控制问题 实际应用时复杂性较高 [46]~[48] 势场结构 算法简明,灵活性高 易陷入局部最小点,势场配置随机性较强 [49]~[50] 组合结构 可发挥不同编队结构的优势 增加了编队控制的复杂度和不确定性 [51]~[52]  下载: 导出CSV
下载: 导出CSV
表 2 不同全局路径规划算法对比
Table 2. Comparison of different global path planning algorithms
算法名称 计算时间 是否总能找到最优路径 轨迹平滑度 缺陷和优势 FM算法 较慢 否 平滑 使用简单、响应速度快,生成路径足够光滑且连续,但是生成路径离障碍物较近,缺乏安全性 A*算法 较慢 是 不平滑 在面对多栅格地图的时候全局规划耗时长,且生成轨迹不平滑,但优势是总能找到最优路径 RRT算法 较慢 否 不平滑 适用于求解复杂障碍空间路径规划问题,但是较小的搜索步长会极大增加计算时间,较大的搜索步长则可能无法求解,且RRT算法生成路径不是最优路径 优化算法 快 否 平滑 能够直接生成平滑轨迹,便于实现轨迹跟随,且在面对一些操纵性约束、避碰规则约束时更容易实现,缺点是容易陷入局部最优,而忽视全局最优解
下载: 导出CSV
表 3 不同船舶编队运动控制方法对比
Table 3. Comparison of different ship formation control methods
方法 优点 缺点 PID 实现简单,不依赖船舶编队运动模型 难以处理时滞、强惯性系统控制问题 滑模控制 响应快速,对参数变化和扰动不灵敏 难以消除抖振问题 反步法 使控制律设计过程结构化,能保证闭环系统的稳定性 难以构造李雅普诺夫函数 智能控制 能处理复杂的非线性、干扰、不确定性、时变等控制问题 难以定义控制目标以及从理论上分析控制鲁棒性和稳定性 模糊控制 能充分发挥专家经验在控制中的作用,通过控制规则描述系统变量的关系,处理非线性、时变问题较强 控制目标定义不明确 自抗扰控制 不依赖系统模型,通过设置过渡过程能有效解决超调与快速性之间的矛盾 对控制器参数敏感,且不大适用于解决多输入多输出控制问题 反馈线性化 使控制问题简化 非线性控制律比较复杂,对模型精度要求比较高 有限时间控制 能从理论上保证系统控制的快速收敛性 难以构造李雅普诺夫函数 最优控制 能处理约束以及显示定义控制目标 对模型精度要求比较高,难以处理不确定性干扰对控制的影响 模型预测控制 能显式处理多变量约束以及不确定性干扰对控制的影响 非线性优化问题求解速率较慢,有时难以满足实时性需求
下载: 导出CSV
-
[1] REYHANOGLU M. Exponential stabilization of an underactuated autonomous surface vessel[J]. Automatica, 1997, 33(12): 2249-2254. doi: 10.1016/S0005-1098(97)00141-6 [2] 袁裕鹏, 王康豫, 尹奇志, 等. 船舶航速优化综述[J]. 交通运输工程学报, 2020, 20(6): 18-34. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202006005.htmYUAN Yu-peng, WANG Kang-yu, YIN Qi-zhi, et al. Review on ship speed optimization[J]. Journal of Traffic and Transportation Engineering, 2020, 20(6): 18-34. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202006005.htm [3] ROBERTS G N, ZIRILLI A, TIANO A, et al. A fuzzy controller for integrated ship motion control[J]. IFAC Proceedings Volumes, 1999, 32(2): 8279-8284. doi: 10.1016/S1474-6670(17)57412-1 [4] MCGOOKIN E W, MURRAY-SMITH D J, LI Yun, et al. Ship steering control systemoptimisation using genetic algorithms[J]. Control Engineering Practice, 2000, 8(4): 429-443. doi: 10.1016/S0967-0661(99)00159-8 [5] ZHANG Rong-jun, CHEN Yao-bin, SUN Zeng-qi, et al. Path control of a surface ship in restricted waters using sliding mode[J]. IEEE Transactions on Control Systems Technology, 2000, 8(4): 722-732. doi: 10.1109/87.852916 [6] NIJMEIJER H, PETTERSEN K Y. Underactuated ship tracking control: theory and experiments[J]. International Journal of Control, 2001, 74(14): 1435-1446. doi: 10.1080/00207170110072039 [7] PAUL K C W. Navigation strategies for multiple autonomous mobile robots moving in formation[J]. Journal of Robotic Systems, 1991, 8(2): 177-195. doi: 10.1002/rob.4620080204 [8] 周翔宇, 吴兆麟, 王凤武, 等. 自主船舶的定义及其自主水平的界定[J]. 交通运输工程学报, 2019, 19(6): 149-162. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201906016.htmZHOU Xiang-yu, WU Zhao-lin, WANG Feng-wu, et al. Definition of autonomous ship and its autonomy level[J]. Journal of Traffic and Transportation Engineering, 2019, 19(6): 149-162. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201906016.htm [9] 柳晨光, 初秀民, 吴青, 等. USV发展现状及展望[J]. 中国造船, 2014, 55(4): 194-205. doi: 10.3969/j.issn.1000-4882.2014.04.024LIU Chen-guang, CHU Xiu-min, WU Qing, et al. A review and prospect of USV research[J]. Shipbuilding of China, 2014, 55(4): 194-205. (in Chinese) doi: 10.3969/j.issn.1000-4882.2014.04.024 [10] 侯瑞超, 唐智诚, 王博, 等. 水面无人艇智能化技术的发展现状和趋势[J]. 中国造船, 2020, 61(增1): 211-220. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGZC2020S1026.htmHOU Rui-chao, TANG Zhi-cheng, WANG Bo, et al. Development status and trend of intelligent technology for unmanned surface vehicles[J]. Shipbuilding of China, 2020, 61(S1): 211-220. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGZC2020S1026.htm [11] 彭周华, 吴文涛, 王丹, 等. 多无人艇集群协同控制研究进展与未来趋势[J]. 中国舰船研究, 2021, 16(1): 51-64, 82. https://www.cnki.com.cn/Article/CJFDTOTAL-JCZG202101006.htmPENG Zhou-hua, WU Wen-tao, WANG Dan, et al. Coordinated control of multiple unmanned surface vehicles: recent advances and future trends[J]. Chinese Journal of Ship Research, 2021, 16(1): 51-64, 82. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCZG202101006.htm [12] LEWIS M A, TAN K H. High precision formation control of mobile robots using virtual structures[J]. Autonomous Robots, 1997, 4(4): 387-403. doi: 10.1023/A:1008814708459 [13] BALCH T, ARKIN R C. Behavior-based formation control for multirobot teams[J]. IEEE Transactions on Robotics and Automation, 1998, 14(6): 926-939. doi: 10.1109/70.736776 [14] BEARD R W, LAWTON J, HADAEGH F Y. A coordination architecture for spacecraft formation control[J]. IEEE Transactions on Control Systems Technology, 2001, 9(6): 777-790. doi: 10.1109/87.960341 [15] DAS A K, FIERRO R, KUMAR V, et al. A vision-based formation control framework[J]. IEEE Transactions on Robotics and Automation, 2002, 18(5): 813-825. doi: 10.1109/TRA.2002.803463 [16] SKJETNE R, MOI S, FOSSEN T I. Nonlinear formation control of marine craft[C]//IEEE. Proceedings of the 41st IEEE Conference on Decision and Control. New York: IEEE, 2002: 1699-1704. [17] 张伟, 王乃新, 魏世琳, 等. 水下无人潜航器集群发展现状及关键技术综述[J]. 哈尔滨工程大学学报, 2020, 41(2): 289-297. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG202002020.htmZHANG Wei, WANG Nai-xin, WEI Shi-lin, et al. Overview of unmanned underwater vehicle swarm development status and key technologies[J]. Journal of Harbin Engineering University, 2020, 41(2): 289-297. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG202002020.htm [18] 邢志伟, 李斯, 罗谦. 机场道面除冰雪车辆队形控制模型[J]. 交通运输工程学报, 2019, 19(4): 182-190. doi: 10.3969/j.issn.1671-1637.2019.04.017XING Zhi-wei, LI Si, LUO Qian. Formation control model of airport pavement deicing vehicles[J]. Journal of Traffic and Transportation Engineering, 2019, 19(4): 182-190. (in Chinese) doi: 10.3969/j.issn.1671-1637.2019.04.017 [19] 柳晨光, 初秀民, 欧阳雪, 等. 欠驱动水面模型船航向保持控制仿真平台[J]. 中国航海, 2016, 39(4): 1-5, 112. doi: 10.3969/j.issn.1000-4653.2016.04.001LIU Chen-guang, CHU Xiu-min, OUYANG Xue, et al. Simulation platform for course keeping control of underactuated surface model ships[J]. Navigation of China, 2016, 39(4): 1-5, 112. (in Chinese) doi: 10.3969/j.issn.1000-4653.2016.04.001 [20] 严新平, 吴超, 马枫. 面向智能航行的货船"航行脑"概念设计[J]. 中国航海, 2017, 40(4): 95-98, 136. doi: 10.3969/j.issn.1000-4653.2017.04.020YAN Xin-ping, WU Chao, MA Feng. Conceptual design of navigation brain system for intelligent cargo ship[J]. Navigation of China, 2017, 40(4): 95-98, 136. (in Chinese) doi: 10.3969/j.issn.1000-4653.2017.04.020 [21] IHLE IA F, ARCAK M, FOSSEN T I. Passivity-based designs for synchronized path-following[J]. Automatica, 2007, 43(9): 1508-1518. doi: 10.1016/j.automatica.2007.02.018 [22] FAHIMI F. Sliding-mode formation control for underactuated surface vessels[J]. IEEE Transactions on Robotics, 2007, 23(3): 617-622. doi: 10.1109/TRO.2007.898961 [23] PENG Zhou-hua, WANG Jun, WANG Dan, et al. An overview of recent advances in coordinated control of multiple autonomous surface vehicles[J]. IEEE Transactions on Industrial Informatics, 2020, 17(2): 732-745. [24] 柯涛, 张恒, 宋佳. 海上无人艇编队抗同频干扰技术研究[J]. 中国造船, 2020, 61(增1): 105-112. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGZC2020S1013.htmKE Tao, ZHANG Heng, SONG Jia. Research on the technology of anti-jamming of the same frequency for the formation of USV[J]. Shipbuilding of China, 2020, 61(S1): 105-112. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGZC2020S1013.htm [25] 张卫东, 刘笑成, 韩鹏. 水上无人系统研究进展及其面临的挑战[J]. 自动化学报, 2020, 46(5): 847-857. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO202005002.htmZHANG Wei-dong, LIU Xiao-cheng, HAN Peng. Progress and challenges of overwater unmanned systems[J]. Acta Automatica Sinica, 2020, 46(5): 847-857. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO202005002.htm [26] SUN Zhi-jian, ZHANG Guo-qing, LU Yu, et al. Leader- follower formation control of underactuated surface vehicles based on sliding mode control and parameter estimation[J]. ISA Transactions, 2018, 72: 15-24. doi: 10.1016/j.isatra.2017.11.008 [27] ENCARN ACAO P, PASCOAL A. Combined trajectory tracking and path following: an application to the coordinated control of autonomous marine craft[C]//IEEE. Proceedings of the 40th IEEE Conference on Decision and Control. New York: IEEE, 2001: 964-969. [28] PEREIRA G A S, PEREIRA G A S, DAS A K, et al. Formation control with configuration space constraints[C]//IEEE. Proceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems. New York: IEEE, 2003: 2755-2760. [29] 李芸, 肖英杰. 领航跟随法和势函数组合的船舶编队控制[J]. 控制理论与应用, 2016, 33(9): 1259-1264. https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201609016.htmLI Yun, XIAO Ying-jie. Combination of leader-follower method and potential function about ship formation control[J]. Control Theory and Applications, 2016, 33(9): 1259-1264. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201609016.htm [30] SHI Hong, WANG Long, CHU Tian-guang. Virtual leader approach to coordinated control of multiple mobile agents with asymmetric interactions[J]. Physica D: Nonlinear Phenomena, 2006, 213(1): 51-65. doi: 10.1016/j.physd.2005.10.012 [31] 王冬梅, 方华京. 基于虚拟领航者的智能群体群集运动控制[J]. 华中科技大学学报(自然科学版), 2008, 36(10): 5-7. doi: 10.3321/j.issn:1671-4512.2008.10.002WANG Dong-mei, FANG Hua-jing. Virtual leaders-based control of flocking motion of intelligent swarm[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2008, 36(10): 5-7. (in Chinese) doi: 10.3321/j.issn:1671-4512.2008.10.002 [32] 王彬. 多艘动力定位船鲁棒自适应编队控制研究[D]. 哈尔滨: 哈尔滨工程大学, 2017.WANG Bin. Research on robust adaptive formation control of multiple dynamic positioning vessels[D]. Harbin: Harbin Engineering University, 2017. (in Chinese) [33] PENG Zhou-hua, WANG Dan, YAO Yu-bin, et al. Robust adaptive formation control with autonomous surface vehicles[C]// IEEE. Proceedings of the 29th Chinese Control Conference. New York: IEEE, 2010: 2115-2120. [34] DUNBAR W B, CAVENEY D S. Distributed receding horizon control of vehicle platoons: stability and string stability[J]. IEEE Transactions on Automatic Control, 2011, 57(3): 620-633. [35] ÖGREN P, EGERSTEDT M, HU X. A control Lyapunov function approach to multiagent coordination[J]. IEEE Transactions on Robotics and Automation, 2001, 18(5): 847-851. [36] GHOMMEM J, MNIF F, POISSON G, et al. Nonlinear formation control of a group of underactuated ships[C]// IEEE. Proceedings of the IEEE OCEANS 2007-Europe. New York: IEEE, 2007: 1-8. [37] 秦梓荷, 林壮, 李平, 等. 存在饱和输入量的欠驱动船舶编队控制[J]. 华中科技大学学报(自然科学版), 2015, 43(8): 75-78. https://www.cnki.com.cn/Article/CJFDTOTAL-HZLG201508016.htmQIN Zi-he, LIN Zhuang, LI Ping, et al. Formation control of underactuated ships with input saturation[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2015, 43(8): 75-78. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HZLG201508016.htm [38] REN W, BEARD R. Decentralized scheme for spacecraft formation flying via the virtual structure approach[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(1): 73-82. doi: 10.2514/1.9287 [39] MEHRJERDI H, GHOMMAM J, SAAD M. Nonlinear coordination control for a group of mobile robots using a virtual structure[J]. Mechatronics, 2011, 21(7): 1147-1155. doi: 10.1016/j.mechatronics.2011.06.006 [40] 崔荣鑫, 徐德民, 沈猛, 等. 基于行为的机器人编队控制研究[J]. 计算机仿真, 2006, 23(2): 137-139. doi: 10.3969/j.issn.1006-9348.2006.02.040CUI Rong-xin, XU De-min, SHEN Meng, et al. Formation control of robots based on behavior[J]. Computer Simulation, 2006, 23(2): 137-139. (in Chinese) doi: 10.3969/j.issn.1006-9348.2006.02.040 [41] BALCH T, ARKIN R C. Behavior-based formation control for multirobot teams[J]. IEEE Transactions on Robotics and Automation, 1998, 14(6): 926-939. doi: 10.1109/70.736776 [42] PANG Shi-kun, LI Ying-hui, YI Hong. Joint formation control with obstacle avoidance of towfish and multiple autonomous underwater vehicles based on graph theory and the null-space-based method[J]. Sensors, 2019, 19(11): 2591. doi: 10.3390/s19112591 [43] ANTONELLI G, ARRICHIELLO F, CHIAVERINI S. Experiments of formation control with collisions avoidance using the null-space-based behavioral control[C]//IEEE. 2006 14th Mediterranean Conference on Control and Automation. New York: IEEE, 2006: 1-6. [44] ROSALES C D, SARCINELLI-FILHO M, SCAGLIA G, et al. Formation control of unmanned aerial vehicles based on the null-space[C]//IEEE. 2014 International Conference on Unmanned Aircraft Systems (ICUAS). New York: IEEE, 2014: 229-236. [45] AHMAD S, FENG Zhi, HU Guo-qiang. Multi-robot formation control using distributed null space behavioral approach[C]//IEEE. International Conference on Robotics and Automation. New York: IEEE, 2014: 3607-3612. [46] SEOK P B, JIN Y S. An error transformation approach for connectivity-preserving and collision-avoiding formation tracking of networked uncertain underactuated surface vessels[J]. IEEE Transactions on Cybernetics, 2018, DOI: 10.1109/TCYB.2018.2834919. [47] 秦奇. 基于刚性结构的船舶编队控制[D]. 大连: 大连海事大学, 2018.QIN Qi. Formation control for marine surface vessels based on rigid structure[D]. Dalian: Dalian Maritime University, 2018. (in Chinese) [48] HUANG Chen-feng, ZHANG Xian-ku, ZHANG Guo-qing. Improved decentralized finite-time formation control of underactuated USVs via a novel disturbance observer[J]. Ocean Engineering, 2019, 174: 117-124. doi: 10.1016/j.oceaneng.2019.01.043 [49] 曲成刚, 曹喜滨, 张泽旭. 人工势场和虚拟领航者结合的多智能体编队[J]. 哈尔滨工业大学学报, 2014, 46(5): 1-5. doi: 10.3969/j.issn.1009-1971.2014.05.001QU Cheng-gang, CAO Xi-bin, ZHANG Ze-xu. Multi-agent system formation integrating virtual leaders into artificial potentials[J]. Journal of Harbin Institute of Technology, 2014, 46(5): 1-5. (in Chinese) doi: 10.3969/j.issn.1009-1971.2014.05.001 [50] 王树凤, 张钧鑫, 张俊友. 基于人工势场和虚拟领航者的智能车辆编队控制[J]. 上海交通大学学报, 2020, 54(3): 305-311. https://www.cnki.com.cn/Article/CJFDTOTAL-SHJT202003011.htmWANG Shu-feng, ZHANG Jun-xin, ZHANG Jun-you. Intelligent vehicles formation control based on artificial potential field and virtual leader[J]. Journal of Shanghai Jiao Tong University, 2020, 54(3): 305-311. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SHJT202003011.htm [51] 王楠, 徐洁琼. 基于图论和行为的深空航天器网络编队控制[J]. 沈阳工业大学学报, 2011, 33(4): 439-444.WANG Nan, XU Jie-qiong. Graph theory and behavior based networked formation control for spacecraft in deep space[J]. Journal of Shenyang University of Technology, 2011, 33(4): 439-444. (in Chinese) [52] LIU Chen-guang, QI Jun-lin, CHU Xiu-min, et al. Cooperative ship formation system and control methods in the ship lock waterway[J]. Ocean Engineering, 2021, 226: 108826. doi: 10.1016/j.oceaneng.2021.108826 [53] 欧阳子路, 王鸿东, 黄一, 等. 基于改进RRT算法的无人艇编队路径规划技术[J]. 中国舰船研究, 2020, 15(3): 18-24. https://www.cnki.com.cn/Article/CJFDTOTAL-JCZG202003003.htmOUYANG Zi-lu, WANG Hong-dong, HUANG Yi, et al. Path planning technologies for USV formation based on improved RRT[J]. Chinese Journal of Ship Research, 2020, 15(3): 18-24. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCZG202003003.htm [54] BARRAQUAND J, LATOMBE J C. Robot motion planning: a distributed representation approach[J]. The International Journal of Robotics Research, 1991, 10(6): 628-649. doi: 10.1177/027836499101000604 [55] 黄振葵, 申雯竹, 杜巧玲, 等. 基于遍历算法的巡航清漂船控制系统[J]. 吉林大学学报(信息科学版), 2019, 37(2): 208-215. doi: 10.3969/j.issn.1671-5896.2019.02.015HUANG Zhen-kui, SHEN Wen-zhu, DU Qiao-ling, et al. Studies on control system of small-scale float-garbage automatic cruise ship based on open-water traversal algorithm[J]. Journal of Jilin University (Information Science Edition), 2019, 37(2): 208-215. (in Chinese) doi: 10.3969/j.issn.1671-5896.2019.02.015 [56] HART P E, NILSSON N J, RAPHAEL B. A formal basis for the heuristic determination of minimum cost paths[J]. IEEE Transactions on Systems Science and Cybernetics, 1968, 4(2): 100-107. doi: 10.1109/TSSC.1968.300136 [57] SETHIANJ A. A fast marching level set method for monotonically advancing fronts[J]. Proceedings of the National Academy of Sciences, 1996, 93(4): 1591-1595. doi: 10.1073/pnas.93.4.1591 [58] CHIANG H T L, TAPIA L. COLREG-RRT: an RRT- based COLREGS-compliant motion planner for surface vehicle navigation[J]. IEEE Robotics and Automation Letters, 2018, 3(3): 2024-2031. doi: 10.1109/LRA.2018.2801881 [59] XIN Jun-feng, ZHONG Jia-bao, YANG Feng-ru, et al. An improved genetic algorithm for path-planning of unmanned surface vehicle[J]. Sensors, 2019, 19(11): 2640. doi: 10.3390/s19112640 [60] KIRKPATRICK S, GELATT C D, VECCHI M P. Optimization by simulated annealing[J]. Science, 1983, 220(4598): 671-680. doi: 10.1126/science.220.4598.671 [61] LYRIDIS D V. An improved ant colony optimization algorithm for unmanned surface vehicle local path planning with multi-modality constraints[J]. Ocean Engineering, 2021, 241: 109890. doi: 10.1016/j.oceaneng.2021.109890 [62] EBERHART R, KENNEDY J. A new optimizer using particle swarm theory[C]//IEEE. Proceedings of the Sixth International Symposium on Micro Machine and Human Science. New York: IEEE, 1995: 39-43. [63] WANG Le, LI Shi-jie, LIU Jia-lun, et al. Ship docking and undocking control with adaptive-mutation beetle swarm prediction algorithm[J]. Ocean Engineering, 2022, 251: 111021. [64] 史恩秀, 陈敏敏, 李俊, 等. 基于蚁群算法的移动机器人全局路径规划方法研究[J]. 农业机械学报, 2014, 45(6): 53-57. https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201406009.htmSHI En-xiu, CHEN Min-min, LI Jun, et al. Research on method of global path-planning for mobile robot based on ant-colony algorithm[J]. Transactions of the Chinese Society of Agricultural Machinery, 2014, 45(6): 53-57. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201406009.htm [65] LIU Yuan-chang, BUCKNALL R. Path planning algorithm for unmanned surface vehicle formations in a practical maritime environment[J]. Ocean Engineering, 2015, 97: 126-144. [66] MA Yong, HU Meng-qi, YAN Xin-ping. Multi-objective path planning for unmanned surface vehicle with currents effects[J]. ISA Transactions, 2018, 75: 137-156. [67] SANG Hong-qiang, YOU Yu-song, SUN Xiu-jun, et al. The hybrid path planning algorithm based on improved A* and artificial potential field for unmanned surface vehicle formations[J]. Ocean Engineering, 2021, 223: 108709. [68] 顾辰. 改进的A*算法在机器人路径规划中的应用[J]. 电子设计工程, 2014, 22(19): 96-98, 102. https://www.cnki.com.cn/Article/CJFDTOTAL-GWDZ201419031.htmGU Chen. Application of improved A* algorithm in robot path planning[J]. Electronic Design Engineering, 2014, 22(19): 96-98, 102. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GWDZ201419031.htm [69] 陈若男, 文聪聪, 彭玲, 等. 改进A*算法在机器人室内路径规划中的应用[J]. 计算机应用, 2019, 39(4): 1006-1011. https://www.cnki.com.cn/Article/CJFDTOTAL-JSJY201904013.htmCHEN Ruo-nan, WEN Cong-cong, PENG Ling, et al. Application of improved A* algorithm in indoor path planning for mobile robot[J]. Journal of Computer Applications, 2019, 39(4): 1006-1011. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSJY201904013.htm [70] SINGH Y, SHARMA S, SUTTON R, et al. A constrained A* approach towards optimal path planning for an unmanned surface vehicle in a maritime environment containing dynamic obstacles and ocean currents[J]. Ocean Engineering, 2018, 168: 187-201. [71] LIU Chen-guang, MAO Qing-zhou, CHU Xiu-min, et al. An improved A-star algorithm considering water current, traffic separation and berthing for vessel path planning[J]. Applied Sciences, 2019, 9(6): 1057. [72] NAEEM W, IRWIN G W, YANG A. COLREGs-based collision avoidance strategies for unmanned surface vehicles[J]. Mechatronics, 2012, 22(6): 669-678. [73] 吕红光, 尹勇. 基于电子海图矢量数据建模的无人船路径规划[J]. 交通信息与安全, 2019, 37(5): 94-106. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201905013.htmLYU Hong-guang, YIN Yong. Path planning of autonomous ship based on electronic chart vector data modeling[J]. Journal of Transportation Information and Safety, 2019, 37(5): 94-106. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201905013.htm [74] LYU Hong-guang, YIN Yong. COLREGS-constrained real-time path planning for autonomous ships using modified artificial potential fields[J]. The Journal of Navigation, 2019, 72(3): 588-608. [75] YOO B, KIM J. Path optimization for marine vehicles in ocean currents using reinforcement learning[J]. Journal of Marine Science and Technology, 2016, 21(2): 334-343. [76] 谢朔. 基于天牛须优化的船舶运动建模与避碰方法研究[D]. 武汉: 武汉理工大学, 2020.XIE Shuo. Beetle antenna search based ship motion modeling and collision avoidance methods[D]. Wuhan: Wuhan University of Technology, 2020. (in Chinese) [77] LEE S M, KWON K Y, JOONGSEON J. A fuzzy logic for autonomous navigation of marine vehicles satisfying COLREG guidelines[J]. International Journal of Control, Automation, and Systems, 2004, 2(2): 171-181. [78] DAI Shi-lu, HE Shu-de, LIN Hai, et al. Platoon formation control with prescribed performance guarantees for USVs[J]. IEEE Transactions on Industrial Electronics, 2017, 65(5): 4237-4246. [79] 林安辉, 蒋德松, 曾建平. 具有输入饱和的欠驱动船舶编队控制[J]. 自动化学报, 2018, 44(8): 1496-1504. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201808013.htmLIN An-hui, JIANG De-song, ZENG Jian-ping. Underactuated ship formation control with input saturation[J]. Acta Automatica Sinica, 2018, 44(8): 1496-1504. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201808013.htm [80] 周卫东, 刘一萌, 查羊羊. 抗时滞无人艇编队队形控制及变换[J]. 哈尔滨工程大学学报, 2019, 40(11): 1865-1869. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201911010.htmZHOU Wei-dong, LIU Yi-meng, ZHA Yang-yang. Anti-time- delay unmanned surface vehicle formation control and transformation[J]. Journal of Harbin Engineering University, 2019, 40(11): 1865-1869. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201911010.htm [81] 蔡星, 谢磊, 苏宏业, 等. 基于串联结构的分布式模型预测控制[J]. 自动化学报, 2013, 39(5): 44-52. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201305007.htmCAI Xing, XIE Lei, SU Hong-ye, et al. Distributed model predictive control based on cascade processes[J]. Acta Automatica Sinica, 2013, 39(5): 44-52. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201305007.htm [82] SCATTOLINI R. Architectures for distributed and hierarchical model predictive control—a review[J]. Journal of Process Control, 2009, 19(5): 723-731. [83] 肖亚辉, 王新民, 王晓燕, 等. 无人机三维编队飞行模糊PID控制器设计[J]. 西北工业大学学报, 2011, 29(6): 834-838. https://www.cnki.com.cn/Article/CJFDTOTAL-XBGD201106003.htmXIAO Ya-hui, WANG Xin-min, WANG Xiao-yan, et al. An effective controller design of formation flight of unmanned aerial vehicles (UAV)[J]. Journal of Northwestern Polytechnical University, 2011, 29(6): 834-838. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XBGD201106003.htm [84] LI Tie-shan, ZHAO Rong, CHEN C L P, et al. Finite-time formation control of under-actuated ships using nonlinear sliding mode control[J]. IEEE Transactions on Cybernetics, 2018, 48(11): 3243-3253. [85] DO K D. Practical formation control of multiple underactuated ships with limited sensing ranges[J]. Robotics and Autonomous Systems, 2011, 59(6): 457-471. [86] SHOJAEI K. Leader-follower formation control of underactuated autonomous marine surface vehicles with limited torque[J]. Ocean Engineering, 2015, 105: 196-205. [87] 邓蕴. 舰船编队避碰的自适应控制研究[J]. 舰船科学技术, 2017, 39(20): 31-33. https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201720012.htmDENG Yun. Research on adaptive control of ship formation collision avoidance[J]. Ship Science and Technology, 2017, 39(20): 31-33. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201720012.htm [88] MAHMOOD A, KIM Y. Decentrailized formation flight control of quadcopters using robust feedback linearization[J]. Journal of the Franklin Institute, 2017, 354(2): 852-871. [89] HUANG Chen-feng, ZHANG Xian-ku, ZHANG Guo-qing. Adaptive neural finite-time formation control for multiple underactuated vessels with actuator faults[J]. Ocean Engineering, 2021, 222: 108556. [90] 张浩. 多智能体系统分布式编队及其最优控制算法研究[D]. 西安: 西安电子科技大学, 2019.ZHANG Hao. Research on the distributed formation control and optimization of multi-agent system[D]. Xi'an: Xidian University, 2019. (in Chinese) [91] NEGENBORN R R, MAESTRE J M. Distributed model predictive control: an overview and roadmap of future research opportunities[J]. IEEE Control Systems Magazine, 2014, 34(4): 87-97. [92] GAO Yu-long, XIA Yuan-qing, DAI Li. Cooperative distributed model predictive control of multiple coupled linear systems[J]. IET Control Theory and Applications, 2015, 9(17): 2561-2567. [93] FERRAMOSCA A, LIMON D, ALVARADO I, et al. Cooperative distributed MPC for tracking[J]. Automatica, 2013, 49(4): 906-914. [94] LIU Teng-fei, JIANG Zhong-ping. Distributed formation control of nonholonomic mobile robots without global position measurements[J]. Automatica, 2013, 49(2): 592-600. [95] ZHOU Zhen, WANG Hong-bin, WANG Yue-ling, et al. Distributed formation control for multiple quadrotor UAVs under Markovian switching topologies with partially unknown transition rates[J]. Journal of the Franklin Institute, 2019, 356(11): 5706-5728. [96] ZHENG Hua-rong, WU Jun, WU Wei-min, et al. Cooperative distributed predictive control for collision-free vehicle platoons[J]. IET Intelligent Transport Systems, 2018, 13(5): 816-824. [97] CHEN Lin-ying, HOPMAN H, NEGENBORN R R. Distributed model predictive control for vessel train formations of cooperative multi-vessel systems[J]. Transportation Research Part C: Emerging Technologies, 2018, 92: 101-118. [98] CHEN Lin-ying, HOPMAN H, NEGENBORN R R. Distributed model predictive control for cooperative floating object transport with multi-vessel systems[J]. Ocean Engineering, 2019, DOI: 10.1016/j.oceaneng.2019.106515. [99] ZHENG Hua-rong, NEGENBORN R R, LODEWIJKS G. Cooperative distributed collision avoidance based on ADMM for waterborne AGVs[C]//Springer. Proceedings of 2015 International Conference on Computational Logistics. Berlin: Springer, 2015: 181-194. [100] 中国船级社. 自主货物运输船舶指南[R]. 北京: 中国船级社, 2018.China Classification Society. Guidelines of autonomous cargo ships[R]. Beiing: China Classification Society, 2018. (in Chinese) [101] 徐利伟. 智能网联汽车队列成形控制及队列稳定性研究[D]. 南京: 东南大学, 2019.XU Li-wei. Formation control and stability analysis of connected and automated vehicle platoon[D]. Nanjing: Southeast University, 2019. (in Chinese) [102] 王祥科, 李迅, 郑志强. 多智能体系统编队控制相关问题研究综述[J]. 控制与决策, 2013(11): 1601-1613. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201311001.htmWANG Xiang-ke, LI Xun, ZHENG Zhi-qiang. Survey of developments on multi-agent formation control related problems[J]. Control and Decision, 2013(11): 1601-1613. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201311001.htm [103] 田大新, 康璐. 基于鱼群效应的无人驾驶车辆编队算法研究[J]. 无人系统技术, 2018, 1(4): 62-67. https://www.cnki.com.cn/Article/CJFDTOTAL-UMST201804007.htmTIAN Da-xin, KANG Lu. Research on algorithm of unmanned vehicle formation based on fish school[J]. Unmanned Systems Technology, 2018, 1(4): 62-67. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-UMST201804007.htm [104] 周子为, 段海滨, 范彦铭. 仿雁群行为机制的多无人机紧密编队[J]. 中国科学: 技术科学, 2017, 47(3): 230-238. https://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201703002.htmZHOU Zi-wei, DUAN Hai-bin, FAN Yan-ming. Unmanned aerial vehicle close formation control based on the behavior mechanism in wild geese[J]. Scientia Sinica Technologica, 2017, 47(3): 230-238. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201703002.htm [105] 杨之元, 段海滨, 范彦铭. 基于莱维飞行鸽群优化的仿雁群无人机编队控制器设计[J]. 中国科学: 技术科学, 2018, 48(2): 161-169. https://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201802005.htmYANG Zhi-yuan, DUAN Hai-bin, FAN Yan-ming. Unmanned aerial vehicle formation controller design via the behavior mechanism in wild geese based on Levy flight pigeon-inspired optimization[J]. Scientia Sinica Technologica, 2018, 48(2): 161-169. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201802005.htm [106] 张弛, 张笛, 孟上, 等. 极地冰区船舶航运的发展动态与展望——POAC 2017国际会议综述[J]. 交通信息与安全, 2017, 35(5): 1-10. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201705001.htmZHANG Chi, ZHANG Di, MENG Shang, et al. Trends and prospects of polar navigation research from 24th POAC International Conference[J]. Journal of Transportation Information and Safety, 2017, 35(5): 1-10. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201705001.htm -






 点击查看大图
点击查看大图
计量
- 文章访问数: 2476
- HTML全文浏览量: 1122
- PDF下载量: 316
- 被引次数: 0
