

Research progress on test scenario of autonomous driving
Article Text (Baidu Translation)
-
摘要: 阐述了目前形成的自动驾驶测试场景的5种定义,并在梳理测试场景、基元场景、场景要素之间逻辑关系的基础上提出了自动驾驶测试场景及有关概念的定义;对比了目前业界较为认可的3种自动驾驶测试场景架构;从场景数据来源梳理了国内外开展的交通事故数据与自然驾驶数据采集与研究现状;概括了利用已知数据、专家数据、测试需求、测试对象以及自动驾驶技术特征等开展未知自动驾驶测试场景构建与自动生成研究的成果。研究结果表明:自动驾驶测试场景的定义及架构与自动驾驶场景的构建与自动生成关系密切;自动驾驶场景可以认为是自动驾驶汽车的行驶环境、交通参与者与驾驶行为等场景要素的有机组合与综合反映,自动驾驶测试场景除包含场景的所有要素外,还应包含场景起始状态、场景发生的态势以及场景结束时造成的影响和结果等内容的动态语义描述;现有测试场景架构已较为完善,但难以满足不同测试目标及测试方法的需求,其优化应充分考虑测试场景设计的流程;交通事故数据采集精度及有效数据特征不一,自然驾驶场景数据难以完全采集,且采集规范不统一,其面向自动驾驶测试场景构建的有效性还有待进一步论证,自动驾驶测试数据有望成为重要补充;提升场景覆盖度、加速测试进程是自动驾驶测试场景构建的重要研究目标,人工智能技术在自动驾驶场景生成领域的深度应用有望满足测试场景的完全覆盖或高覆盖需求;面向不同自动驾驶等级的测试场景分级及面向自动驾驶加速测试场景构建方法将是自动驾驶测试场景构建下一步研究的重要方向。Abstract: Five existing definitions of autonomous driving test scenario were expounded, and the definitions of autonomous driving test scenario and related concepts were proposed by combining the logical relationships between test scenario, primitive scenario, and scenario elements. Three test scenario architectures of autonomous driving that are recognized in the industry were compared. From the perspective of scenario data sources, the current situation in the collection and research of traffic accident and naturalistic driving data at home and abroad was summarized. Based on the known data, expert data, test requirements, test objects, and technical characteristics of autonomous driving, the research results on the construction and automatic generation of unknown autonomous driving test scenarios were summarized. Research results show that the definition and architecture of autonomous driving test scenario are closely related to its construction and automatic generation. The autonomous driving scenario can be considered as an organic combination and comprehensive reflection of scenario elements, such as the driving environment, traffic participants, and driving behavior of autonomous vehicle. In addition to these elements, autonomous driving test scenarios should include a dynamic semantic description of initial state of the scenario, the situation of the scenario, and the impact and results at the end of the scenario. Although the existing test scenario architecture is relatively perfect, it is difficult to meet the requirements of different test objectives and test methods. Therefore, in the optimization of test scenario architecture, the design process of test scenario should be considered. However, the collection accuracy and effective characteristics of traffic accident data are not uniform, which makes it difficult to achieve the complete collection of naturalistic driving scenario data, and the collection specifications are not standardized. Therefore, the effectiveness of traffic accident and naturalistic driving data for the construction of autonomous driving test scenarios must be further demonstrated, and the autonomous driving test data are expected to become an important supplement. Improving scenario coverage and accelerating the testing process are important research goals in the construction of autonomous driving test scenarios. The in-depth application of artificial intelligence technology in the field of autonomous driving scenario generation is expected to meet complete or high coverage requirements of test scenarios. The classification of test scenarios for different levels of autonomous driving and the test scenario construction method for accelerated test of autonomous driving will be the next important research directions in test scenario construction for autonomous driving. 7 figs, 103 refs.
-
Key words:
- autonomous driving /
- test scenario /
- scenario architecture /
- scenario collection /
- scenario construction
-

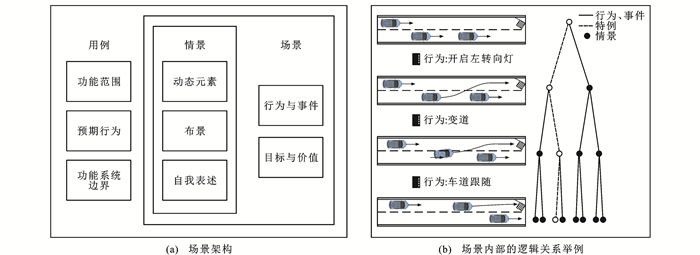
图 1 基于情景、行为和事件的场景架构
Figure 1. Scenario architecture based on scenes, actions and events

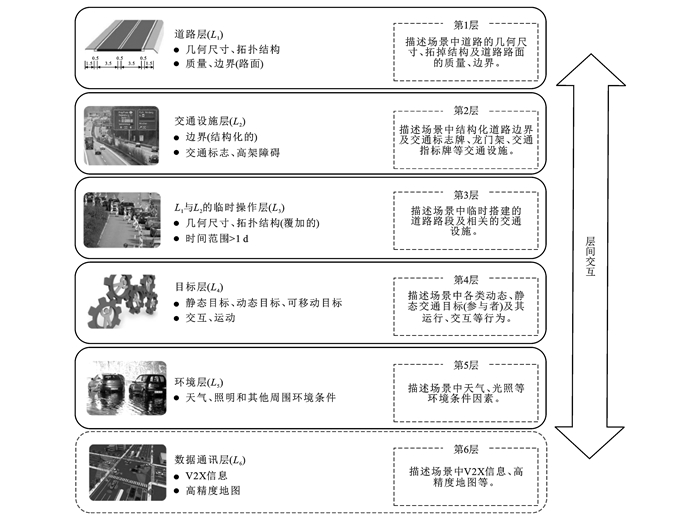
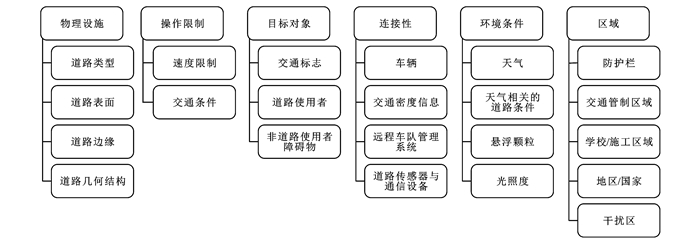
图 3 NHTSA 6层设计运行域模型
Figure 3. Operational design domain model of 6-layer proposed by NHTSA

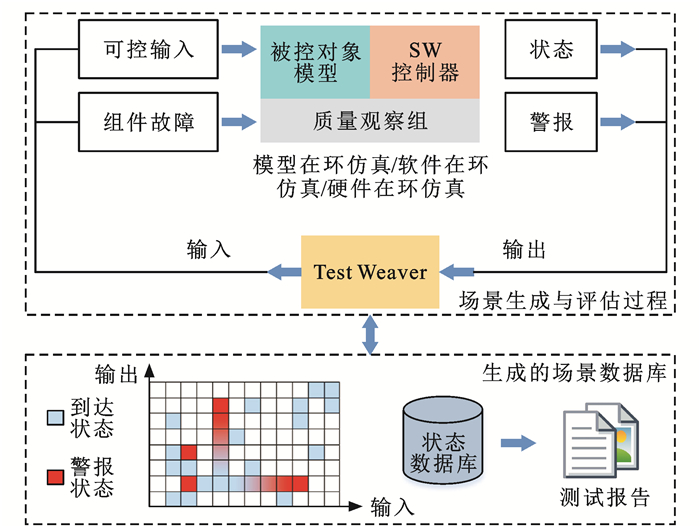
图 5 基于TestWeaver的测试场景生成与评估
Figure 5. Generation and evaluation of test scenario based on TestWeaver
-
[1] 朱冰, 张培兴, 赵健, 等. 基于场景的自动驾驶汽车虚拟测试研究进展[J]. 中国公路学报, 2019, 32(6): 1-19. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906002.htmZHU Bing, ZHANG Pei-xing, ZHAO Jian, et al. Review of scenario-based virtual validation methods for automated vehicles[J]. China Journal of Highway and Transport, 2019, 32(6): 1-19. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906002.htm [2] PEREIRA J, PREMEBIDA C, ASVADI A, et al. Test and evaluation of connected and autonomous vehicles in real-world scenarios[C]//IEEE. 2019 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2019: 14-19. [3] STRAUB J. Automated testing of a self-driving vehicle system[C]//IEEE. 2017 IEEE AUTOTESTCON Conference. New York: IEEE, 2017: 1-6. [4] TANG Li, SHI Yun-peng, HE Qing, et al. Performance test of autonomous vehicle lidar sensors under different weather conditions[J]. Transportation Research Record, 2020, 2674(1): 319-329. doi: 10.1177/0361198120901681 [5] ZANG Shi-zhe, DING Ming, SMITH D, et al. The impact of adverse weather conditions on autonomous vehicles: how rain, snow, fog, and hail affect the performance of a self-driving car[J]. IEEE Vehicular Technology Magazine, 2019, 14(2): 103-111. doi: 10.1109/MVT.2019.2892497 [6] 余卓平, 邢星宇, 陈君毅. 自动驾驶汽车测试技术与应用进展[J]. 同济大学学报(自然科学版), 2019, 47(4): 540-547. https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ201904013.htmYU Zhuo-ping, XING Xing-yu, CHEN Jun-yi. Review on automated vehicle testing technology and its application[J]. Journal of Tongji University (Natural Science), 2019, 47(4): 540-547. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ201904013.htm [7] 冯洋, 夏志龙, 郭安, 等. 自动驾驶软件测试技术研究综述[J]. 中国图象图形学报, 2021, 26(1): 13-27.FENG Yang, XIA Zhi-long, GUO An, et al. Survey of testing techniques of autonomous driving software[J]. Journal of Image and Graphics, 2021, 26(1): 13-27. (in Chinese) [8] SHAO Yun-li, ZULKEFLI M A M, SUN Zong-xuan, et al. Evaluating connected and autonomous vehicles using a hardware-in-the-loop testbed and a living lab[J]. Transportation Research Part C: Emerging Technologies, 2019, 102: 121-135. doi: 10.1016/j.trc.2019.03.010 [9] CHEN Yu, CHEN Shi-tao, XIAO Tong, et al. Mixed test environment-based vehicle-in-the-loop validation—a new testing approach for autonomous vehicles[C]//IEEE. 2020 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2020: 1283-1289. [10] SZALAY Z, NYERGES Á, HAMAR Z, et al. Technical specification methodology for an automotive proving ground dedicated to connected and automated vehicles[J]. Periodica Polytechnica Transportation Engineering, 2017, 45(3): 168-174. doi: 10.3311/PPtr.10708 [11] LI Li, WANG Xiao, WANG Kun-feng, et al. Parallel testing of vehicle intelligence via virtual-real interaction[J]. Science Robotics, 2019, 4(28): eaaw4106. doi: 10.1126/scirobotics.aaw4106 [12] FAYAZI S A, VAHIDI A, LUCKOW A. A vehicle-in-the-loop (VIL) verification of an all-autonomous intersection control scheme[J]. Transportation Research Part C: Emerging Technologies, 2019, 107: 193-210. doi: 10.1016/j.trc.2019.07.027 [13] FENG Yi-heng, YU Chun-hui, XU Shao-bing, et al. An augmented reality environment for connected and automated vehicle testing and evaluation[C]//IEEE. 2018 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2018: 1549-1554. [14] 王润民, 张心睿, 王由道, 等. 自动驾驶封闭测试场地建设技术研究与实践[J]. 汽车实用技术, 2020(4): 33-36. https://www.cnki.com.cn/Article/CJFDTOTAL-SXQC202004012.htmWANG Run-min, ZHANG Xin-rui, WANG You-dao, et al. Research and practice on construction technology of closed test field autonomous driving[J]. Automobile Applied Technology, 2020(4): 33-36. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SXQC202004012.htm [15] 杨林瑶, 陈思远, 王晓, 等. 数字孪生与平行系统: 发展现状、对比及展望[J]. 自动化学报, 2019, 45(11): 2001-2031. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201911001.htmYANG Lin-yao, CHEN Si-yuan, WANG Xiao, et al. Digital twins and parallel systems: state of the art, comparisons and prospect[J]. Acta Automatica Sinica, 2019, 45(11): 2001-2031. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201911001.htm [16] QUEIROZ R, BERGER T, CZARNECKI K. GeoScenario: an open DSL for autonomous driving scenario representation[C]//IEEE. 2019 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2019: 287-294. [17] HUANG Z, ARIEF M, LAM H, et al. Evaluation uncertainty in data-driven self-driving testing[C]//IEEE. 2019 IEEE Intelligent Transportation Systems Conference. New York: IEEE, 2019: 1902-1907. [18] KALRA N, PADDOCK S M. Driving to safety: how many miles of driving would it take to demonstrate autonomous vehicle reliability?[J]. Transportation Research Part A: Policy and Practice, 2016, 94: 182-193. doi: 10.1016/j.tra.2016.09.010 [19] FENG S, YAN X, SUN H, et al. Intelligent driving intelligence test for autonomous vehicles with naturalistic and adversarial environment[J]. Nature Communications, 2021, 12(1): 1-14. doi: 10.1038/s41467-020-20314-w [20] CHANCE G, GHOBRIAL A, LEMAIGNAN S, et al. An agency-directed approach to test generation for simulation-based autonomous vehicle verification[C]//IEEE. 2020 IEEE International Conference on Artificial Intelligence Testing. New York: IEEE, 2020: 31-38. [21] MENZEL T, BAGSCHIK G, MAURER M. Scenarios for development, test and validation of automated vehicles[C]//IEEE. 2018 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2018: 1821-1827. [22] BATSCH F, KANARACHOS S, CHEAH M, et al. A taxonomy of validation strategies to ensure the safe operation of highly automated vehicles[J]. Journal of Intelligent Transportation Systems, 2020(6): 1-20. doi: 10.1080/15472450.2020.1738231 [23] 周文帅, 朱宇, 赵祥模, 等. 面向高速公路车辆切入场景的自动驾驶测试用例生成方法[J]. 汽车技术, 2021(1): 11-18.ZHOU Wen-shuai, ZHU Yu, ZHAO Xiang-mo, et al. Vehicle cut-in test case generation methods for testing of autonomous driving on highway[J]. Automobile Technology, 2021(1): 11-18. (in Chinese) [24] HUANG Z, LAM H, LEBLANC D J, et al. Accelerated evaluation of automated vehicles using piecewise mixture models[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 19(9): 2845-2855. http://ieeexplore.ieee.org/document/8116682 [25] HUANG Z, LAM H, ZHAO D. An accelerated testing approach for automated vehicles with background traffic described by joint distributions[C]//IEEE. 20th International Conference on Intelligent Transportation Systems. New York: IEEE, 2017: 933-938. [26] 余荣杰, 田野, 孙剑. 高等级自动驾驶汽车虚拟测试: 研究进展与前沿[J]. 中国公路学报, 2020, 33(11): 125-138. doi: 10.3969/j.issn.1001-7372.2020.11.012YU Rong-jie, TIAN Ye, SUN Jian. Highly automated vehicle virtual testing: a review of recent developments and research frontiers[J]. China Journal of Highway and Transport, 2020, 33(11): 125-138. (in Chinese) doi: 10.3969/j.issn.1001-7372.2020.11.012 [27] RIEDMAIER S, PONN T, LUDWIG D, et al. Survey on scenario-based safety assessment of automated vehicles[J]. IEEE Access, 2020, 8: 87456-87477. doi: 10.1109/ACCESS.2020.2993730 [28] GO B K, CARROLL B J M. The blind men and the elephant: views of scenario-based system design[J]. Interactions, 2004, 11(6): 44-53. doi: 10.1145/1029036.1029037 [29] LI Li, HUANG Wu-ling, LIU Yue-hu, et al. Intelligence testing for autonomous vehicles: a new approach[J]. IEEE Transactions on Intelligent Vehicles, 2016, 1(2): 158-166. doi: 10.1109/TIV.2016.2608003 [30] ULBRICH S, MENZEL T, RESCHKA A, et al. Defining and substantiating the terms scene, situation, and scenario for automated driving[C]//IEEE. 18th IEEE International Conference on Intelligent Transportation Systems. New York: IEEE, 2015: 982-988. [31] ELROFAI H, PAARDEKOOPER J, GELDER E, et al. Scenario-based safety validation of connected and automated driving[R]. Helmond: TNO, 2018. [32] ROCKLAGE E, KRAFT H, KARATAS A, et al. Automated scenario generation for regression testing of autonomous vehicles[C]//IEEE. 20th IEEE International Conference on Intelligent Transportation Systems. New York: IEEE, 2017: 476-483. [33] MENZEL T, BAGSCHIK G, MAURER M. Scenarios for development, test and validation of automated vehicles[C]// IEEE. 2018 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2018: 1821-1827. [34] BAGSCHIK G, MENZEL T, MAURER M. Ontology based scene creation for the development of automated vehicles[C]//IEEE. 2018 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2018: 1813-1820. [35] SCHIEMENTZ M. Test case variation and execution[R]. Berlin: Research Project PEGASUS, 2019. [36] THORN E, KIMMEL S, CHAKA M. A framework for automated driving system testable cases and scenarios[R]. Washington DC: NHTSA, 2018. [37] KANG Y, YIN H, BERGER C. Test your self-driving algorithm: an overview of publicly available driving datasets and virtual testing environments[J]. IEEE Transactions on Intelligent Vehicles, 2019, 4(2): 171-185. doi: 10.1109/TIV.2018.2886678 [38] 李一兵, 孙岳霆, 徐成亮. 基于交通事故数据的汽车安全技术发展趋势分析[J]. 汽车安全与节能学报, 2016, 7(3): 241-253. https://www.cnki.com.cn/Article/CJFDTOTAL-QCAN201603001.htmLI Yi-bing, SUN Yue-ting, XU Cheng-liang. Developing trends of automotive safety technology: an analysis based on traffic accident data[J]. Journal of Automotive Safety and Energy, 2016, 7(3): 241-253. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCAN201603001.htm [39] 韩大双, 马志雄, 朱西产, 等. 用于自动驾驶汽车的汽车-骑车人事故场景分析[J]. 汽车安全与节能学报, 2020, 11(2): 220-226. doi: 10.3969/j.issn.1674-8484.2020.02.009HAN Da-shuang, MA Zhi-xiong, ZHU Xi-chan, et al. Car-cyclist accident scene analysis for autopilot vehicles[J]. Journal of Automotive Safety and Energy, 2020, 11(2): 220-226. (in Chinese) doi: 10.3969/j.issn.1674-8484.2020.02.009 [40] OTTE D, FACIUS T. Accident typology comparisons between pedelecs and conventional bicycles[J]. Journal of Transportation Safety and Security, 2020, 12(1): 116-135. doi: 10.1080/19439962.2019.1662530 [41] SCANLON J M, SHERONY R, GABLER H C. Earliest sensor detection opportunity for left turn across path opposite direction crashes[J]. IEEE Transactions on Intelligent Vehicles, 2017, 2(1): 62-70. doi: 10.1109/TIV.2017.2708611 [42] 胡林, 方胜勇, 黄晶, 等. 基于逻辑回归的二轮车-汽车碰撞事故深度分析[J]. 汽车工程, 2016, 38(11): 1288-1293. doi: 10.3969/j.issn.1000-680X.2016.11.002HU Lin, FANG Sheng-yong, HUANG Jing, et al. In-depth analysis on cycle-vehicle crash accident based on logistic regression[J]. Automotive Engineering, 2016, 38(11): 1288-1293. (in Chinese) doi: 10.3969/j.issn.1000-680X.2016.11.002 [43] HITOSUGI M, TOKUDOME S. Injury severity of occupants in lateral collisions in standard and small vehicles: analysis of ITARDA's in-depth investigation data[J]. International Journal of Crashworthiness, 2011, 16(6): 657-663. doi: 10.1080/13588265.2011.616116 [44] VIVO G, DALMASSO P, VERNACCHIA F. The European integrated project SAFESPOT——how ADAS applications co-operate for the driving safety[C]//IEEE. 2007 IEEE Intelligent Transportation Systems Conference. New York: IEEE, 2007: 624-629. [45] DIOS E, FERRER A, HILL J, et al. Towards a global and harmonized database for in-depth accident investigation in Europe: the DaCoTa project[J]. Wireless Personal Communications, 2013, 68(4): 1633-1671. doi: 10.1007/s11277-012-0543-4 [46] 曹毅, 周华, 肖凌云, 等. 基于NAIS数据库中视频信息的人-车碰撞事故特征分析[J]. 汽车安全与节能学报, 2020, 11(1): 44-52. doi: 10.3969/j.issn.1674-8484.2020.01.004CAO Yi, ZHOU Hua, XIAO Ling-yun, et al. Analysis of pedestrian-vehicle collision accident characteristics based on the video information from NAIS database[J]. Journal of Automotive Safety and Energy, 2020, 11(1): 44-52. (in Chinese) doi: 10.3969/j.issn.1674-8484.2020.01.004 [47] International Transport Forum. Road Safety Annual Report 2018[R]. Paris: OECD Publishing, 2018. [48] LENARD J, BADEA-ROMERO A, DANTON R. Typical pedestrian accident scenarios for the development of autonomous emergency braking test protocols[J]. Accident Analysis and Prevention, 2014, 73: 73-80. doi: 10.1016/j.aap.2014.08.012 [49] NITSCHE P, THOMAS P, STUETZ R, et al. Pre-crash scenarios at road junctions: a clustering method for car crash data[J]. Accident Analysis and Prevention, 2017, 107: 137-151. doi: 10.1016/j.aap.2017.07.011 [50] SUI Bo, ZHOU Sheng-qi, ZHAO Xiao-hua, et al. An overview of car-to-two-wheeler accidents in China: guidance for AEB assessment[C]//NHTSA. The 25th International Technical Conference on the Enhanced Safety of Vehicles. Washington DC: NHTSA, 2017: 1-12. [51] SCANLON J M, SHERONY R, GABLER H C. Earliest sensor detection opportunity for left turn across path opposite direction crashes[J]. IEEE Transactions on Intelligent Vehicles, 2017, 2(1): 62-70. doi: 10.1109/TIV.2017.2708611 [52] SANDER U, LUBBE N. The potential of clustering methods to define intersection test scenarios: assessing real-life performance of AEB[J]. Accident Analysis and Prevention, 2018, 113: 1-11. doi: 10.1016/j.aap.2018.01.010 [53] 胡林, 易平, 黄晶, 等. 基于真实事故案例的自动紧急制动系统两轮车测试场景研究[J]. 汽车工程, 2018, 40(12): 1435-1446, 1453. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201812010.htmHU Lin, YI Ping, HUANG Jing, et al. A research on test scenes of two-wheeled vehicles for automatic emergency braking system based on real accident cases[J]. Automotive Engineering, 2018, 40(12): 1435-1446, 1453. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201812010.htm [54] 徐向阳, 周兆辉, 胡文浩, 等. 基于事故数据挖掘的AEB路口测试场景[J]. 北京航空航天大学学报, 2020, 46(10): 1817-1825. https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK202010001.htmXU Xiang-yang, ZHOU Zhao-hui, HU Wen-hao, et al. Intersection test scenarios for AEB based on accident data mining[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(10): 1817-1825. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK202010001.htm [55] ZHANG Lan-fang, CHEN Chen, ZHANG Jia-yan, et al. Modeling lane-changing behavior in freeway off-ramp areas from the shanghai naturalistic driving study[J]. Journal of Advanced Transportation, 2018, 2018: 1-10. http://www.researchgate.net/publication/322504608_Modeling_Lane-Changing_Behavior_in_Freeway_Off-Ramp_Areas_from_the_Shanghai_Naturalistic_Driving_Study [56] DINGUS T, KLAUER S G, NEALE V L, et al. The 100-car naturalistic driving study, phase Ⅱ——results of the 100-car field experiment[R]. Washington DC: NHTSA, 2006. [57] LEBLANC D, BEZZINA D, TIERNAN T, et al. Functional requirements for integrated vehicle-based safety systems (IVBSS)—light vehicle platform[R]. Ann Arbor: University of Michigan Transportation Research Institute, 2008. [58] RUSSELL S M, BLANCO M, ATWOOD J, et al. Naturalistic study of level 2 driving automation functions[R]. Washington DC: NHTSA, 2018. [59] HUANG X, ZHAO D, PENG H. Empirical study of DSRC performance based on safety pilot model deployment data[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(10): 2619-2628. doi: 10.1109/TITS.2017.2649538 [60] BÄRGMAN J, SVANBERG E. Sweden-Michigan naturalistic field operational test (SeMiFOT) phase 1: WP 3 data management, final report[R]. Göteborg: Chalmers University of Technology, 2010. [61] WILMINK I, BENMIMOUN M, NOORT M V, et al. euroFOT: large scale field operational test-impact assessment[C]//ITS America. 16th ITS World Congress and Exhibition on Intelligent Transport Systems and Services. Washington DC: ITS America, 2009: 1-3. [62] BARNARD Y, UTESCH F, NES N V, et al. The study design of UDRIVE: the naturalistic driving study across Europe for cars, trucks and scooters[J]. European Transport Research Review, 2016, 8(2): 1-10. doi: 10.1007/s12544-016-0202-z/figures/4 [63] GEIGER A, LENZ P, STILLER C, et al. Vision meets robotics: the KITTI dataset[J]. International Journal of Robotics Research, 2013, 32(11): 1229-1235. http://imaiai.oxfordjournals.org/external-ref?access_num=10.1177/0278364913491297&link_type=DOI [64] 朱西产, 魏昊舟, 马志雄. 基于自然驾驶数据的跟车场景潜在风险评估[J]. 中国公路学报, 2020, 33(4): 169-181. doi: 10.3969/j.issn.1001-7372.2020.04.017ZHU Xi-chan, WEI Hao-zhou, MA Zhi-xiong. Assessment of the potential risk in car-following scenario based on naturalistic driving data[J]. China Journal of Highway and Transport, 2020, 33(4): 169-181. (in Chinese) doi: 10.3969/j.issn.1001-7372.2020.04.017 [65] 王雪松, 杨敏明. 基于自然驾驶数据的变道切入行为分析[J]. 同济大学学报(自然科学版), 2018, 46(8): 1057-1063. doi: 10.11908/j.issn.0253-374x.2018.08.008WANG Xue-song, YANG Min-ming. Cut-in behavior analyses based on naturalistic driving data[J]. Journal of Tongji University (Natural Science), 2018, 46(8): 1057-1063. (in Chinese) doi: 10.11908/j.issn.0253-374x.2018.08.008 [66] 刘生. 智能网联汽车驾驶场景数据采集的研究及应用[J]. 汽车纵横, 2018(8): 74-75. doi: 10.3969/j.issn.2095-1892.2018.08.029LIU Sheng. Research and application of data collection of intelligent networked vehicle driving scene[J]. Auto Review, 2018(8): 74-75. (in Chinese) doi: 10.3969/j.issn.2095-1892.2018.08.029 [67] 王雪松, 孙平, 张晓春, 等. 基于自然驾驶数据的高速公路跟驰模型参数标定[J]. 中国公路学报, 2020, 33(5): 132-142. doi: 10.3969/j.issn.1001-7372.2020.05.012WANG Xue-song, SUN Ping, ZHANG Xiao-chun, et al. Calibrating car-following models on freeway based on naturalistic driving data[J]. China Journal of Highway and Transport, 2020, 33(5): 132-142. (in Chinese) doi: 10.3969/j.issn.1001-7372.2020.05.012 [68] YANG Min-ming, WANG Xue-song, MOHAMMED Q. Examining lane change gap acceptance, duration and impact using naturalistic driving data[J]. Transportation Research Part C: Emerging Technologies, 2019, 104: 317-331. doi: 10.1016/j.trc.2019.05.024 [69] 王雪松, 朱美新, 邢祎伦. 基于自然驾驶数据的避撞预警对跟车行为影响[J]. 同济大学学报(自然科学版), 2016, 44(7): 1045-1051. https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ201607010.htmWANG Xue-song, ZHU Mei-xin, XING Yi-lun. Impact of collision warning system on car-following behavior based on naturalistic driving data[J]. Journal of Tongji University (Natural Science), 2016, 44(7): 1045-1051. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ201607010.htm [70] 王雪松, 朱美新. 基于自然驾驶数据的中国驾驶人城市快速路跟驰模型标定与验证[J]. 中国公路学报, 2018, 31(9): 129-137. doi: 10.3969/j.issn.1001-7372.2018.09.015WANG Xue-song, ZHU Mei-xin. Calibrating and validating car-following models on urban expressways for Chinese drivers using naturalistic driving data[J]. China Journal of Highway and Transport, 2018, 31(9): 129-137. (in Chinese) doi: 10.3969/j.issn.1001-7372.2018.09.015 [71] 吴斌, 朱西产, 沈剑平, 等. 基于自然驾驶数据的危险评估算法研究[J]. 汽车工程, 2017, 39(8): 907-914. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201708009.htmWU Bin, ZHU Xi-chan, SHEN Jian-ping, et al. A study on risk assessment algorithm based on natural driving data[J]. Automotive Engineering, 2017, 39(8): 907-914. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201708009.htm [72] 吴斌, 朱西产, 沈剑平, 等. 基于自然驾驶研究的直行追尾危险场景诱导因素分析[J]. 同济大学学报(自然科学版), 2018, 46(9): 1253-1260. https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ201809013.htmWU Bin, ZHU Xi-chan, SHEN Jian-ping, et al. Analysis of causation of rear-end incidents based on naturalistic driving study[J]. Journal of Tongji University (Natural Science), 2018, 46(9): 1253-1260. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ201809013.htm [73] 吴斌, 朱西产, 沈剑平. 基于自然驾驶数据的驾驶员紧急制动行为特征[J]. 同济大学学报(自然科学版), 2018, 46(11): 1514-1519, 1535. doi: 10.11908/j.issn.0253-374x.2018.11.007WU Bin, ZHU Xi-chan, SHEN Jian-ping. Driver emergency braking behavior based on naturalistic driving data[J]. Journal of Tongji University (Natural Science), 2018, 46(11): 1514-1519, 1535. (in Chinese) doi: 10.11908/j.issn.0253-374x.2018.11.007 [74] 吴斌, 朱西产, 沈剑平. 基于自然驾驶数据的驾驶员紧急转向变道模型[J]. 同济大学学报(自然科学版), 2019, 47(11): 1618-1625. doi: 10.11908/j.issn.0253-374x.2019.11.011WU Bin, ZHU Xi-chan, SHEN Jian-ping. Analysis of driver emergency steering lane changing behavior model based on naturalistic driving data[J]. Journal of Tongji University (Natural Science), 2019, 47(11): 1618-1625. (in Chinese) doi: 10.11908/j.issn.0253-374x.2019.11.011 [75] ZHAO D, LAM H, PENG H, et al. Accelerated evaluation of automated vehicles safety in lane-change scenarios based on importance sampling techniques[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(3): 595-607. doi: 10.1109/TITS.2016.2582208 [76] HUANG Z, ZHAO D, LAM H, et al. Evaluation of automated vehicles in the frontal cut-in scenario- an enhanced approach using piecewise mixture models[C]//IEEE. IEEE International Conference on Robotics and Automation. New York: IEEE, 2017: 197-202. [77] GELDER E D, PAARDEKOOPER J P. Assessment of automated driving systems using real-life scenarios[C]//IEEE. 2017 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2017: 589-594. [78] YAO Wen, ZENG Qi-qi, LIN Yu-ping, et al. On-road vehicle trajectory collection and scene-based lane change analysis: part Ⅱ[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(1): 206-220. doi: 10.1109/TITS.2016.2571724 [79] 张强, 黄俊富, 张胜根, 等. 基于自然驾驶数据的APS系统测试评价场景研究[C]//中国汽车工程学会. 2018中国汽车工程学会年会. 北京: 中国汽车工程学会, 2018: 266-270.ZHANG Qiang, HUANG Jun-fu, ZHANG Sheng-gen, et al. Study of test and evaluation scenario for assisted parking system based on China-FOT[C]//China-SAE. 2018 China-SAE Congress. Beijing: China-SAE, 2018: 266-270. (in Chinese) [80] 刘颖, 贺锦鹏, 刘卫国, 等. 自动紧急制动系统行人测试场景的研究[J]. 汽车技术, 2014(3): 35-39. doi: 10.3969/j.issn.1000-3703.2014.03.009LIU Ying, HE Jin-peng, LIU Wei-guo, et al. Research on test scenarios for AEB pedestrian system[J]. Automobile Technology, 2014(3): 35-39. (in Chinese) doi: 10.3969/j.issn.1000-3703.2014.03.009 [81] HAUER F, SCHMIDT T, HOLZMULLER B, et al. Did we test all scenarios for automated and autonomous driving systems?[C]//IEEE. 2019 IEEE Intelligent Transportation Systems Conference. New York: IEEE, 2019: 2950-2955. [82] HALLERBACH S, XIA Y, EBERLE U, et al. Simulation-based identification of critical scenarios for cooperative and automated vehicles[J]. SAE International, 2018, 1(2): 93-106. http://www.researchgate.net/publication/324194968_Simulation-Based_Identification_of_Critical_Scenarios_for_Cooperative_and_Automated_Vehicles [83] KIM B, MASUDA T, SHIRAISHI S. Test specification and generation for connected and autonomous vehicle in virtual environments[J]. ACM Transactions on Cyber-Physical Systems, 2019, 4(1): 1-26. doi: 10.23939/acps2019.01.001 [84] MASUDA S, NAKAMURA H, KAJITANI K. Rule-based searching for collision test cases of autonomous vehicles simulation[J]. IET Intelligent Transport Systems, 2018, 12(9): 1088-1095. doi: 10.1049/iet-its.2018.5335 [85] ZHENG Xiao-kun, LIANG Hua-wei, YU Biao, et al. Rapid generation of challenging simulation scenarios for autonomous vehicles based on adversarial test[C]//IEEE. 2020 IEEE International Conference on Mechatronics and Automation. New York: IEEE, 2020: 1166-1172. [86] WEN M, PARK J, CHO K. A scenario generation pipeline for autonomous vehicle simulators[J]. Human-centric Computing and Information Sciences, 2020, 10(1): 1-15. doi: 10.1186/s13673-019-0205-6 [87] XIA Qin, DUAN Jian-lin, GAO Feng, et al. Automatic generation method of test scenario for ADAS based on complexity[C]//SAE. SAE 2017 Intelligent and Connected Vehicles Symposium. Warrendale: SAE, 2017: 1-9. [88] 舒红, 袁康, 修海林, 等. 自动驾驶汽车基础测试场景构建研究[J]. 中国公路学报, 2019, 32(11): 245-254. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201911026.htmSHU Hong, YUAN Kang, XIU Hai-lin, et al. Construction of basic test scenarios of automated vehicles[J]. China Journal of Highway and Transport, 2019, 32(11): 245-254. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201911026.htm [89] WAGNER S, GROH K, KUHBECK T, et al. Using time-to-react based on naturalistic traffic object behavior for scenario-based risk assessment of automated driving[C]//IEEE. 2018 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2018: 1521-1528. [90] ZOFKA M R, KUHNT F, KOHLHAAS R, et al. Data-driven simulation and parametrization of traffic scenarios for the development of advanced driver assistance systems[C]//IEEE. 2015 18th International Conference on Information Fusion, New York: IEEE, 2015: 1422-1428. [91] MULLINS G E, STANKIEWICZ P G, HAWTHORNE R C, et al. Adaptive generation of challenging scenarios for testing and evaluation of autonomous vehicles[J]. Journal of Systems and Software, 2018, 137: 197-215. doi: 10.1016/j.jss.2017.10.031 [92] ZHAO D, HUANG X, PENG H, et al. Accelerated evaluation of automated vehicles in car-following maneuvers[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(3): 733-744. doi: 10.1109/TITS.2017.2701846 [93] LANGNER J, BACH J, RIES L, et al. Estimating the uniqueness of test scenarios derived from recorded real-world-driving-data using autoencoders[C]//IEEE. 2018 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2018: 1860-1866. [94] TATAR M. Enhancing ADAS test and validation with automated search for critical situations[C]//DSA. DSC 2015 Europe—Driving Simulation Conference and Exhibition. Boulogne-Billancourt: DSA, 2015: 1-4. [95] LI Y, TAO J, WOTAWA F. Ontology-based test generation for automated and autonomous driving functions[J]. Information and Software Technology, 2020, 117: 106200. doi: 10.1016/j.infsof.2019.106200 [96] KOREN M, ALSAIF S, LEE R, et al. Adaptive stress testing for autonomous vehicles[C]//IEEE. 2018 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2018: 1-7. [97] FREMONT D J, KIM E, PANT Y V, et al. Formal scenario-based testing of autonomous vehicles: from simulation to the real world[C]//IEEE. 2020 IEEE International Conference on Intelligent Transportation Systems. New York: IEEE, 2020: 1-8. [98] MULLINS G E, DRESS A G, STANKIEWICZ P G, et al. Accelerated testing and evaluation of autonomous vehicles via imitation learning[C]//IEEE. 2018 IEEE International Conference on Robotics and Automation. New York: IEEE, 2018: 5636-5642. [99] 赵祥模, 承靖钧, 徐志刚, 等. 基于整车在环仿真的自动驾驶汽车室内快速测试平台[J]. 中国公路学报, 2019, 32(6): 124-136. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906014.htmZHAO Xiang-mo, CHENG Jing-jun, XU Zhi-gang, et al. An indoor rapid-testing platform for autonomous vehicle based on vehicle-in-the-loop simulation[J]. China Journal of Highway and Transport, 2019, 32(6): 124-136. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906014.htm [100] SHAO Y, ZULKEFLI M A M, SUN Z, et al. Evaluating connected and autonomous vehicles using a hardware-in-the-loop testbed and a living lab[J]. Transportation Research Part C: Emerging Technologies, 2019, 102: 121-135. doi: 10.1016/j.trc.2019.03.010 [101] LIU Fei-qi, ZHAO Fu-quan, LIU Zong-wei, et al. Can autonomous vehicle reduce greenhouse gas emissions? A country-level evaluation[J]. Energy Policy, 2019, 132: 462-473. doi: 10.1016/j.enpol.2019.06.013 [102] KAMANN A, HASIRLIOGLU S, DORIC I, et al. Test methodology for automotive surround sensors in dynamic driving situations[C]//IEEE. 2017 IEEE 85th Vehicular Technology Conference: VTC-Spring. New York: IEEE, 2017: 1-6. [103] 赵祥模, 王文威, 王润民, 等. 智能汽车整车在环测试台转向随动系统[J]. 长安大学学报(自然科学版), 2019, 39(6): 116-126. https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL201906014.htmZHAO Xiang-mo, WANG Wen-wei, WANG Run-min, et al. Turn following system of intelligent vehicle-in-loop test bench[J]. Journal of Chang'an University(Natural Science Edition), 2019, 39(6): 116-126. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL201906014.htm -

 下载:
下载:

 点击查看大图
点击查看大图
图(7)
计量
- 文章访问数: 4558
- HTML全文浏览量: 2487
- PDF下载量: 806
- 被引次数: 0
