

Self-organizing method for traffic coupling between adjacent ramps in intelligent and connected environments
-
摘要: 为改善智能网联环境下匝道合流区通行安全与效率问题,提出了一种近邻匝道交通耦合自组织方法,通过建立主线车流间隙与匝道车辆速度优化匹配模型,以实现对主线最外侧车道总体车头间距的优化调整,在保证汇入安全的前提下提升了近邻匝道内的车辆通行效率;选取重庆市内环快速路上东环立交附近2个近邻匝道为研究原型,利用在线地图结合无人机航拍以及定点摄像等数据采集方式对试验路段进行实地调查;在智能网联环境下,分别运用协同自适应巡航控制(CACC)和交通耦合自组织方法(TCS),采用Python、SUMO和TraCI对试验路段车辆运行情况进行联合仿真。研究结果表明:相较于CACC,TCS的换道次数从65.52次降至52.64次,下降了19.87%,有效缓解了近邻匝道内的交通冲突;平均延误从24.53 s降至14.39 s,下降了70.38%,其中平峰期降低了77.71%,高峰期只降低了34.50%,相较于高峰期,在平峰期的运行效率提升较大;时间占有率从18.70%降至8.63%,下降了53.86%,不同车道间的时间占有率之差降低至6.00%,即车辆在不同车道上的分布更平均;平均速度从78.31 km·h-1上升至80.78 km·h-1,提升了3.06%,有效缓解了合流区和分流区附近的减速情况。Abstract: A self-organizing method for traffic coupling between adjacent ramps was proposed to improve traffic safety and efficiency in on-ramp merging areas in intelligent and connected environments. By establishing an optimal matching model between the mainline traffic flow gap and on-ramp vehicle speed, the overall headway of the outermost lane of the mainline was optimized and adjusted. On the premise of ensuring the safe merging of on-ramp vehicles, the traffic efficiency of vehicles between adjacent ramps was improved. Two adjacent ramps near the Donghuan overpass on the inner ring expressway in Chongqing were selected as the research prototype. Online map combined with drone aerial photography, fixed-point photography, and other data acquisition methods were used to conduct field investigations on the testing sections. In intelligent and connected environments, cooperative adaptive cruise control (CACC) and traffic coupling self-organizing (TCS) method were applied respectively, and Python, SUMO, and TraCI were used for co-simulation of vehicle operation on the test road. Research results show that compared with CACC, the lane changing number in TCS decreases by 19.87% from 65.52 to 52.64, which effectively alleviates the traffic conflict between adjacent ramps. The average delay decreases by 70.38% from 24.53 s to 14.39 s. To be specific, the average delay decreases by 77.71% in the off-peak period and 34.50% in the peak period, respectively. Compared with the peak period, the efficiency in the off-peak period is greatly improved. The time occupancy decreases by 53.86% from 18.70% to 8.63%. The time occupancy difference between different lanes decreases to 6.00%, that is, vehicles are more evenly distributed across different lanes. The average speed increases by 3.06% from 78.31 km·h-1 to 80.78 km·h-1, which effectively alleviates the deceleration near the on-ramp merging and off-ramp diverging areas.
-

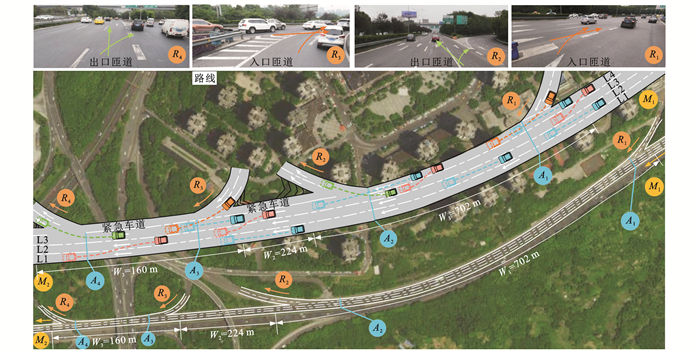
图 3 东环立交近邻匝道交织区道路结构
Figure 3. Road structure of adjacent ramps in East Ring Interchange

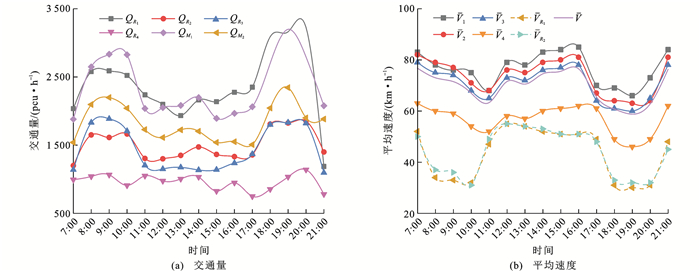
图 4 东环立交近邻匝道交织区交通调查数据
Figure 4. Adjacent ramps traffic survey data for East Ring Interchange
表 1 CACC和TCS的换道次数统计
Table 1. Lane changing times statistics under CACC and TCS
时间 K1 K′1 K2 K′2 K3 K′3 ρ1/% ρ2/% ρ3/% 7:00 135 103 81 68 130 101 23.70 16.05 22.31 8:00 161 111 99 77 134 109 31.06 22.22 18.66 9:00 155 124 78 60 122 93 20.00 23.08 23.77 10:00 138 112 76 70 102 86 18.84 7.89 15.69 11:00 65 54 33 30 52 43 16.92 9.09 17.31 12:00 26 21 20 17 15 13 19.23 15.00 13.33 13:00 28 23 23 20 14 12 17.86 13.04 14.29 14:00 29 25 24 21 19 16 13.79 12.50 15.79 15:00 44 39 20 18 29 24 11.36 10.00 17.24 16:00 57 46 28 25 20 17 19.30 10.71 15.00 17:00 75 60 75 61 32 24 20.00 18.67 25.00 18:00 129 91 88 72 58 45 20.93 18.18 22.41 19:00 114 84 79 67 69 55 29.46 15.19 20.29 20:00 65 51 67 60 35 29 26.32 10.45 17.14 21:00 44 35 33 29 33 28 20.45 12.12 15.15  下载: 导出CSV
下载: 导出CSV
表 2 CACC和TCS交通参数统计
Table 2. Traffic parameter statistics under CACC and TCS
参数 Kε/次 TWε, j/s RAi, j/% VAi, j/(km·h-1) CACC 65.52 24.53 18.70 78.31 TCS 52.64 14.39 8.63 80.78
下载: 导出CSV
-
[1] MA Q L, WANG X Y, ZHANG S, et al. Distributed self-organizing control of CAVs between multiple adjacent-ramps[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(5): 5430-5441. doi: 10.1109/TITS.2023.3244185 [2] 杨澜, 赵祥模, 吴国垣, 等. 智能网联汽车协同生态驾驶策略综述[J]. 交通运输工程学报, 2020, 20(5): 58-72. doi: 10.19818/j.cnki.1671-1637.2020.05.004YANG Lan, ZHAO Xiang-mo, WU Guo-yuan, et al. Review on connected and automated vehicles based cooperative eco-driving strategies[J]. Journal of Traffic and Transportation Engineering, 2020, 20(5): 58-72. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2020.05.004 [3] MEHR G, ESKANDARIAN A. Sentinel: an onboard lane change advisory system for intelligent vehicles to reduce traffic delay during freeway incidents[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 8906-8917. doi: 10.1109/TITS.2021.3087578 [4] 吴文静, 战勇斌, 杨丽丽, 等. 考虑安全间距的合流区可变限速协调控制方法[J]. 吉林大学学报(工学版), 2022, 52(6): 1315-1323. https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY202206009.htmWU Wen-jing, ZHAN Yong-bin, YANG Li-li, et al. Coordinated control method of variable speed limit in on-ramp area considering safety distance[J]. Journal of Jilin University (Engineering and Technology Edition), 2022, 52(6): 1315-1323. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY202206009.htm [5] ALI SILGU M, ERDAĞI İ, GÖKSU G, et al. Combined control of freeway traffic involving cooperative adaptive cruise controlled and human driven vehicles using feedback control through SUMO[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(8): 11011-11025. doi: 10.1109/TITS.2021.3098640 [6] LIU J Q, ZHAO W Z, XU C. An efficient on-ramp merging strategy for connected and automated vehicles in multi-lane traffic[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(6): 5056-5067. doi: 10.1109/TITS.2020.3046643 [7] 马庆禄, 乔娅, 冯敏. 变道约束下近邻交织区交通均衡组织方法[J]. 交通运输系统工程与信息, 2019, 19(4): 164-171. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201904024.htmMA Qing-lu, QIAO Ya, FENG Min. Traffic equilibrium organization method for neighbor weaving sections based on lane-changing constraints[J]. Journal of Transportation Systems Engineering and Information Technology, 2019, 19(4): 164-171. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201904024.htm [8] JING S C, HUI F, ZHAO X M, et al. Cooperative game approach to optimal merging sequence and on-ramp merging control of connected and automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(11): 4234-4244. doi: 10.1109/TITS.2019.2925871 [9] 李巧茹, 王少航, 陈亮. 高速公路合流区可变限速和换道协同控制研究[J]. 重庆交通大学学报(自然科学版), 2022, 41(2): 35-43. doi: 10.3969/j.issn.1674-0696.2022.02.06LI Qiao-ru, WANG Shao-hang, CHEN Liang. Cooperative control of variable speed limit and lane change in expressway confluence area[J]. Journal of Chongqing Jiaotong University (Natural Science Edition), 2022, 41(2): 35-43. (in Chinese) doi: 10.3969/j.issn.1674-0696.2022.02.06 [10] WANG S H, ZHAO M, SUN D H, et al. On-ramp merging strategy with two-stage optimization based on fully proactive and cooperative merging of vehicles[J]. Journal of Transportation Engineering, Part A: Systems, 2023, 149(4): 04023005. doi: 10.1061/JTEPBS.TEENG-7194 [11] NTOUSAKIS I A, NIKOLOS I K, PAPAGEORGIOU M. Optimal vehicle trajectory planning in the context of cooperative merging on highways[J]. Transportation Research Part C: Emerging Technologies, 2016, 71: 464-488. doi: 10.1016/j.trc.2016.08.007 [12] DING Heng, DI Yun-ran, ZHENG Xiao-yan, et al. Automated cooperative control of multilane freeway merging areas in connected and autonomous vehicle environments[J]. Transportmetrica B: Transport Dynamics, 2021, 9(1): 437-455. doi: 10.1080/21680566.2021.1887774 [13] 孙剑, 殷炬元, 黎淘宁. 快速路入口匝道瓶颈宏观交通流模型[J]. 交通运输工程学报, 2019, 19(3): 122-133. doi: 10.3969/j.issn.1671-1637.2019.03.013SUN Jian, YIN Ju-yuan, LI Tao-ning. Macroscopic traffic flow model of expressway on-ramp bottlenecks[J]. Journal of Traffic and Transportation Engineering, 2019, 19(3): 122-133. (in Chinese) doi: 10.3969/j.issn.1671-1637.2019.03.013 [14] 邹祥莉, 徐建闽, 于洁涵, 等. 基于分层递阶结构和S模型预测控制的快速路多匝道协同控制模型研究[J]. 公路工程, 2019, 44(5): 105-109, 161. https://www.cnki.com.cn/Article/CJFDTOTAL-ZNGL201905021.htmZOU Xiang-li, XU Jian-min, YU Jie-han, et al. Research on expressway multi-ramp collaborative control model based on hierarchical structure and S-model predictive control[J]. Highway Engineering, 2019, 44(5): 105-109, 161. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZNGL201905021.htm [15] HAN Y, WANG M, LI L H, et al. A physics-informed reinforcement learning-based strategy for local and coordinated ramp metering[J]. Transportation Research Part C: Emerging Technologies, 2022, 137: 103584. doi: 10.1016/j.trc.2022.103584 [16] MEGAT JOHARI M U, MEGAT JOHARI N, SAVOLAINEN P T, et al. Safety evaluation of freeway exit ramps with advisory speed reductions[J]. Transportation Research Record, 2023, 2677(1): 503-512. doi: 10.1177/03611981221099908 [17] GU C Y, WU C Z, WU Y H, et al. Distributionally robust ramp metering under traffic demand uncertainty[J]. Transportmetrica B: Transport Dynamics, 2022, 10(1): 652-666. doi: 10.1080/21680566.2022.2025952 [18] POOLADSANJ M, SAVLA K, IOANNOU P A. Ramp metering to maximize freeway throughput under vehicle safety constraints[J]. Transportation Research Part C: Emerging Technologies, 2023, 154: 104267. doi: 10.1016/j.trc.2023.104267 [19] PENG C, XU C C. A coordinated ramp metering framework based on heterogeneous causal inference[J]. Computer-Aided Civil and Infrastructure Engineering, 2023, 38: 1365-1380. doi: 10.1111/mice.12994 [20] GU C Y, ZHOU T, WU C Z. Deep Koopman traffic modeling for freeway ramp metering[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(6): 6001-6013. doi: 10.1109/TITS.2023.3248649 [21] ZHANG C, MA W, ZHAO J, et al. Destination-aware coordinated ramp metering for preventing off-ramp queue spillover and mainstream congestion[J]. IEEE Intelligent Transportation Systems Magazine, 2024, 16(1): 40-61. doi: 10.1109/MITS.2023.3323029 [22] KUSUMA A, LIU R H, CHOUDHURY C, Modelling lane-changing mechanisms on motorway weaving sections[J]. Transportmetrica B: Transport Dynamics, 2020, 8(1): 1-21. doi: 10.1080/21680566.2019.1703840 [23] TIAN H Q, WEI C, JIANG C Y, et al. Personalized lane change planning and control by imitation learning from drivers[J]. IEEE Transactions on Industrial Electronics, 2023, 70(4): 3995-4006. doi: 10.1109/TIE.2022.3177788 [24] BAGHERI M, BARTIN B, OZBAY K. Implementing artificial neural network-based gap acceptance models in the simulation model of a traffic circle in SUMO[J]. Transportation Research Record, 2023, 2677(12): 227-239. doi: 10.1177/03611981231167420 [25] MONTEIRO F V, IOANNOU P. Safe autonomous lane changes and impact on traffic flow in a connected vehicle environment[J]. Transportation Research Part C: Emerging Technologies, 2023, 151: 104138. doi: 10.1016/j.trc.2023.104138 [26] CHEN J M, ZHOU Y, CHUNG E. An integrated approach to optimal merging sequence generation and trajectory planning of connected automated vehicles for freeway on-ramp merging sections[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(2): 1897-1912. doi: 10.1109/TITS.2023.3315650 [27] 王正武, 潘军良, 陈涛, 等. 单向三车道高速公路合流区智能网联车辆协同汇入控制[J]. 交通运输工程学报, 2023, 23(6): 270-282. doi: 10.19818/j.cnki.1671-1637.2023.06.018WANG Zheng-wu, PAN Jun-liang, CHEN Tao, et al. Cooperative merging control of connected and automated vehicles in merging area for one-way three-lane freeway[J]. Journal of Traffic and Transportation Engineering, 2023, 23(6): 270-282. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2023.06.018 [28] 马艳丽, 祁首铭, 吴昊天, 等. 基于PET算法的匝道合流区交通冲突识别模型[J]. 交通运输系统工程与信息, 2018, 18(2): 142-148. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201802022.htmMA Yan-li, QI Shou-ming, WU Hao-tian, et al. Traffic conflict identification model based on post encroachment time algorithm in ramp merging area[J]. Journal of Transportation Systems Engineering and Information Technology, 2018, 18(2): 142-148. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201802022.htm [29] 谢光强, 赵俊伟, 李杨, 等. 基于多集群系统的车辆协同换道控制[J]. 广东工业大学学报, 2021, 38(5): 1-9. doi: 10.12052/gdutxb.210050XIE Guang-qiang, ZHAO Jun-wei, LI Yang, et al. Cooperative lane-changing based on multi-cluster system[J]. Journal of Guangdong University of Technology, 2021, 38(5): 1-9. (in Chinese) doi: 10.12052/gdutxb.210050 [30] 常玉林, 张成祥, 张鹏, 等. 车联网环境下基于间隙优化的无信号交叉口车速控制方法[J]. 重庆理工大学学报(自然科学), 2021, 35(3): 10-17, 60. https://www.cnki.com.cn/Article/CJFDTOTAL-CGGL202103003.htmCHANG Yu-lin, ZHANG Cheng-xiang, ZHANG Peng, et al. A speed control method of non-signalized intersection based on gap optimization under connected vehicle environment[J]. Journal of Chongqing University of Technology (Natural Science), 2021, 35(3): 10-17, 60. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-CGGL202103003.htm [31] 刘伟, 陈科全, 田宗忠, 等. 基于密度熵的道路交通事故影响范围分区模型[J]. 交通运输工程学报, 2019, 19(6): 163-170. doi: 10.19818/j.cnki.1671-1637.2019.06.015LIU Wei, CHEN Ke-quan, TIAN Zong-zhong, et al. Partition model of road traffic accident influence area based on density entropy[J]. Journal of Traffic and Transportation Engineering, 2019, 19(6): 163-170. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2019.06.015 -

 点击查看大图
点击查看大图

计量
- 文章访问数: 559
- HTML全文浏览量: 88
- PDF下载量: 81
- 被引次数: 0
