

Trajectory prediction method for high-speed train group tracking operation based on LSTM-KF model
-
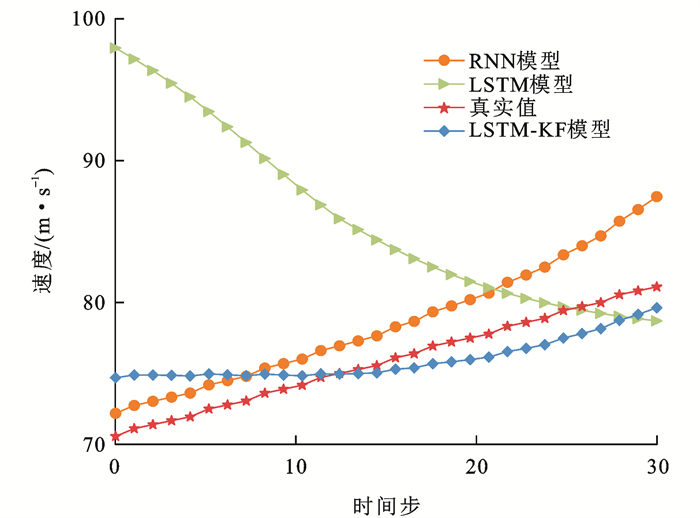
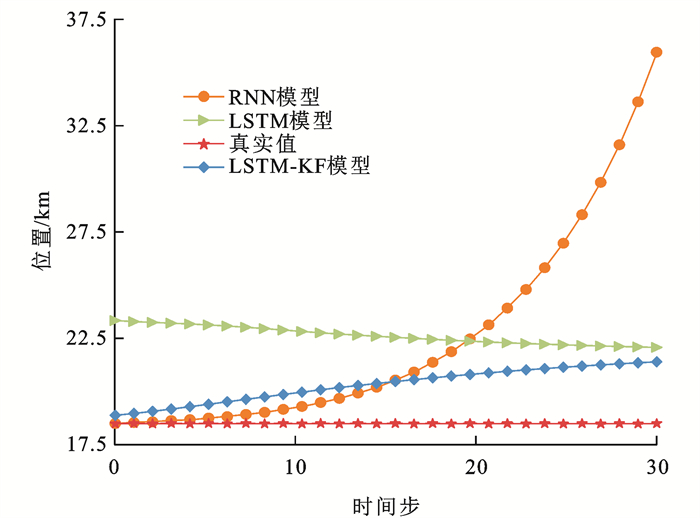
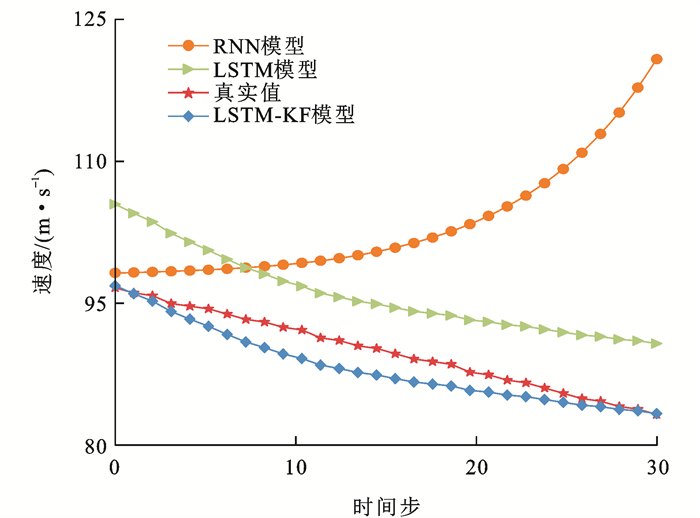
摘要: 为进一步缩小列车追踪距离以提高运力,研究了高速列车群组追踪运行轨迹预测问题;考虑长短期记忆网络(LSTM)模型处理序列数据的优势和卡尔曼滤波(KF)模型噪声处理的能力,提出了一种新型列车轨迹预测LSTM-KF模型;使用列车运行的历史数据进行LSTM模型训练,生成了列车轨迹预测曲线;KF模型结合预测结果和动力学机理,更正了计算结果,使LSTM模型预测的列车轨迹变得平滑;依托于高铁列控系统仿真测试平台的标准线路数据进行了仿真验证。仿真结果表明:在巡航工况下,30个预测步长后,LSTM-KF、LSTM和循环神经网络(RNN)模型的位置预测误差分别为78、798和911 m,速度相对真实值的预测误差分别为1、22和1 m·s-1,LSTM-KF模型的位置均方根误差(RMSE)分别为LSTM和RNN的7%和15%,LSTM-KF模型的速度RMSE分别为LSTM和RNN的14%和30%;在加速工况下,3个模型的位置预测误差均值分别为94、294和2 691 m,速度预测误差均值分别为0.09、10.05和2.74 m·s-1;在减速工况下,3个模型的位置预测误差均值分别为1 181、4 135和4 079 m,速度预测误差均值分别为1.14、6.01和13.52 m·s-1。可见,LSTM-KF模型在不同运行工况下均能显著提升预测精度,能够有效生成长时域数据序列,为高速列车群组追踪运行提供决策。Abstract: The problem of operation trajectory prediction in high-speed train group tracking was studied to further shorten train tracking distance and improve transportation capacity. The advantages of the long short-term memory (LSTM) model in processing sequence data and the ability of the Kalman filter (KF) model to process noise were considered, and a new LSTM-KF model for train trajectory prediction was proposed. The historical data of train operation were used for LSTM model training, and train trajectory prediction curve was generated. The predicted results and dynamics mechanism were integrated by the KF model to correct the calculation results, smoothing the train trajectory predicted by the LSTM model. The experiment was simulated and verified based on the standard data of lines on the simulation and test platform of the high-speed railway train control system. Simulation results show that the prediction errors of the position relative to the true value of the three models of LSTM-KF, LSTM, and recurrent neural networks (RNN) are 78, 798, and 911 m, respectively after 30 predicted steps under the cruise driving condition. The prediction errors of the speed are 1, 22, and 1 m·s-1, respectively. The position root mean square error (RMSE) of the LSTM-KF is 7% and 15% of that of LSTM and RNN, and the speed RMSE of the LSTM-KF model is 14% and 30% of that of LSTM and RNN. The mean position prediction errors under acceleration condition are 94, 294, and 2 691 m, respectively, and the mean speed prediction errors are 0.09, 10.05, and 2.74 m·s-1, respectively. The mean position prediction errors under deceleration condition are 1 181, 4 135, and 4 079 m, respectively, and the mean speed prediction errors are 1.14, 6.01, and 13.52 m·s-1, respectively. It can be seen that the prediction accuracy under different operating conditions can be significantly improved in the LSTM-KF model, and long-term data sequences can be effectively generated to provide decision-making for the tracking operations of high-speed train groups.
-

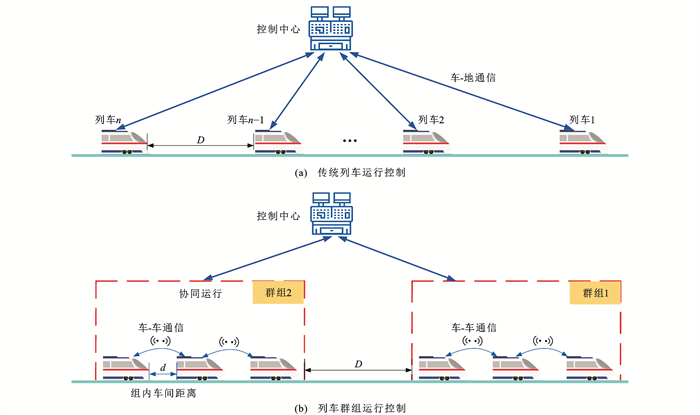
图 1 高速列车传统运行与群组运行方式
Figure 1. Traditional and group operation modes of high-speed train

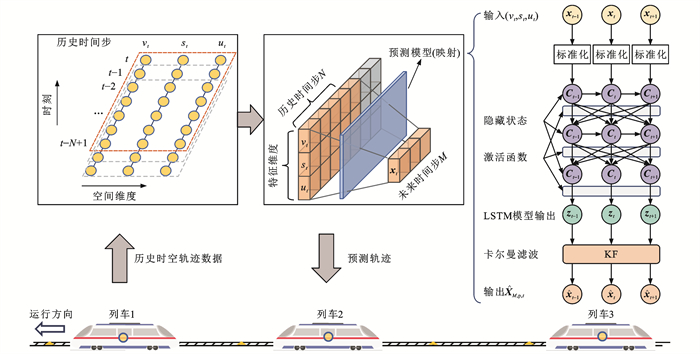
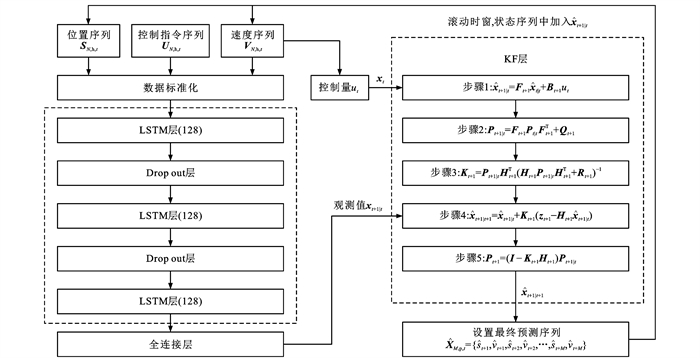
图 3 基于LSTM-KF模型的列车轨迹预测原理
Figure 3. Train track prediction principle based on LSTM-KF model

图 6 高速铁路列车群组追踪运行场景
Figure 6. High-speed railway train group tracking operation scenario

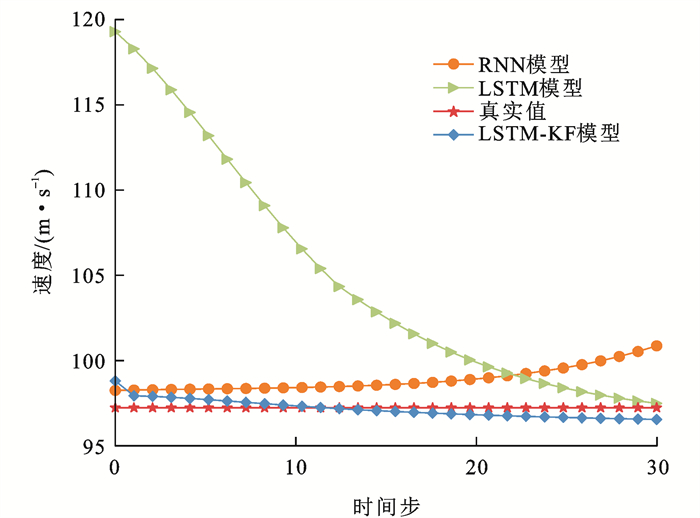
图 9 巡航工况下不同模型的速度预测结果
Figure 9. Speed prediction results of different models under cruising conditions

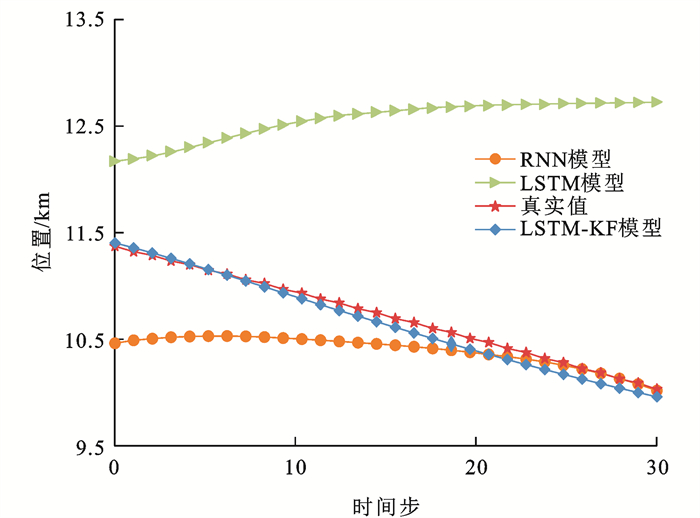
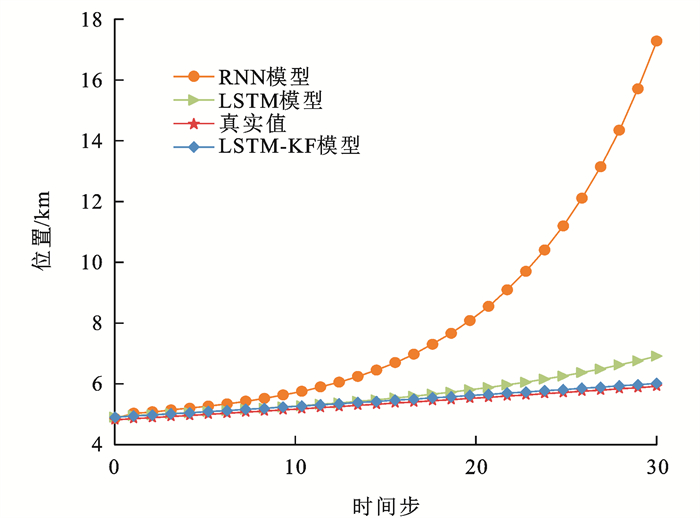
图 10 巡航工况下不同模型的位置预测结果
Figure 10. Position prediction results of different models under cruising conditions

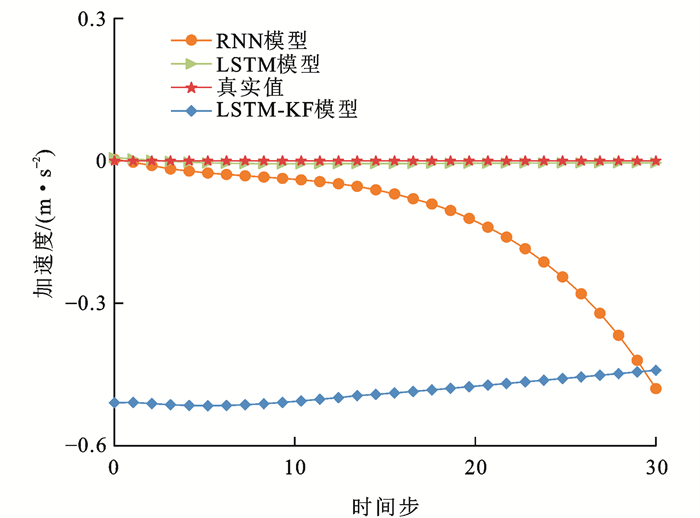
图 11 巡航工况下不同模型的加速度预测结果
Figure 11. Acceleration prediction results of different models under cruising conditions

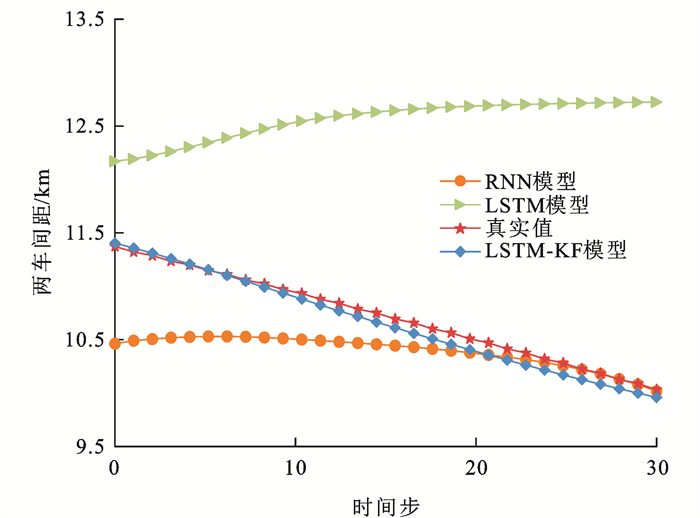
图 12 巡航工况下不同模型的两车间距预测结果
Figure 12. Prediction results of distances between two trains under cruising conditions using different models

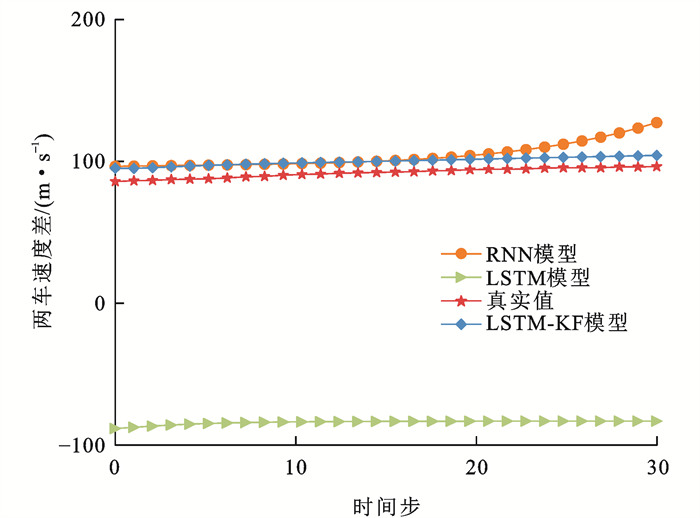
图 13 巡航工况下不同模型的两车速度差预测结果
Figure 13. Prediction results of speed differences between two trains under cruising conditions using different models

图 14 加速工况下不同模型的位置预测结果
Figure 14. Position prediction results of different models under acceleration conditions

图 15 加速工况下不同模型的速度预测结果
Figure 15. Speed prediction results of different models under acceleration conditions

图 16 减速工况下不同模型的位置预测结果
Figure 16. Position prediction results of different models under deceleration conditions

图 17 减速工况下不同模型的速度预测结果
Figure 17. Speed prediction results of different models under deceleration conditions
表 1 试验对比参数设置
Table 1. Experimental comparison parameter settings
参数 取值 LSTM网络结构 100×100 预测时窗/s 6 历史时间步长 12 未来时间步长 30 状态迁移矩阵 $\left[\begin{array}{cc}0 & 0.5 \\ 0 & 1\end{array}\right]$ 观测矩阵 $\left[\begin{array}{cc}1 & 0 \\ 0 & 1\end{array}\right]$ 观测协方差矩阵 $\left[\begin{array}{cc}10 & 0 \\ 0 & 10\end{array}\right]$ 过程误差协方差矩阵 $\left[\begin{array}{cc}0.1 & 0 \\ 0 & 0.1\end{array}\right]$  下载: 导出CSV
下载: 导出CSV
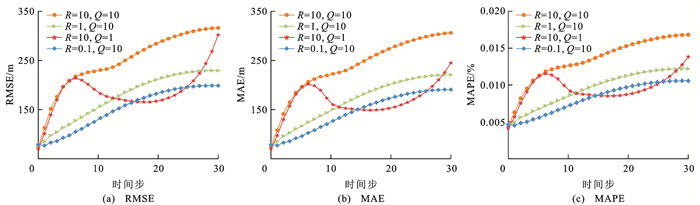
表 2 巡航工况下不同模型的位置预测结果评价
Table 2. Evaluation of position prediction results of different models under cruising conditions
时间步 RMSE/m MAE/m MAPE/% RNN LSTM-KF LSTM RNN LSTM-KF LSTM RNN LSTM-KF LSTM 1 1 456.41 78.95 2 799.74 1 456.41 78.95 2 799.74 0.08 0.00 0.14 5 1 591.03 97.88 2 464.24 1 586.20 96.49 2 453.65 0.08 0.01 0.12 10 1 904.61 132.90 2 234.40 1 870.70 127.31 2 211.47 0.10 0.01 0.11 15 2 431.12 163.92 2 083.96 2 311.75 155.26 2 053.49 0.12 0.01 0.11 20 3 345.82 185.87 1 961.03 3 011.15 176.17 1 921.79 0.14 0.01 0.10 25 4 966.02 196.82 1 850.34 4 144.52 187.91 1 799.06 0.18 0.01 0.09
下载: 导出CSV
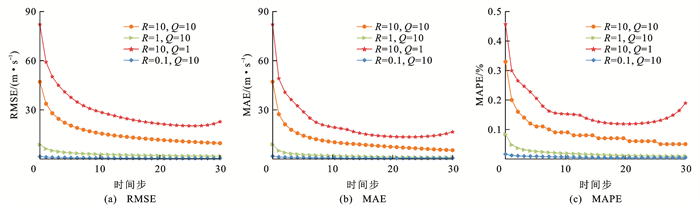
表 3 巡航工况下不同模型的速度预测结果评价
Table 3. Evaluation of speed prediction results of different models under cruising conditions
时间步 RMSE/(m·s-1) MAE/(m·s-1) MAPE/% RNN LSTM-KF LSTM RNN LSTM-KF LSTM RNN LSTM-KF LSTM 1 1.02 1.58 22.07 1.02 1.58 22.07 0.01 0.02 0.19 5 1.16 0.85 19.28 1.15 0.77 19.17 0.01 0.01 0.16 10 1.40 0.65 16.40 1.37 0.53 15.87 0.01 0.01 0.14 15 1.76 0.55 14.08 1.68 0.40 12.93 0.02 0.00 0.12 20 2.34 0.51 12.40 2.13 0.39 10.64 0.02 0.00 0.10 25 3.31 0.51 11.16 2.83 0.42 8.87 0.03 0.00 0.08
下载: 导出CSV
表 4 不同工况下真实值和LSTM-KF模型预测值
Table 4. Real values and predicted values of LSTM-KF model under different conditions
时间步 加速工况-位置/m 加速工况-速度/(m·s-1) 减速工况-位置/m 减速工况-速度/(m·s-1) 真实值 LSTM-KF模型预测值 真实值 LSTM-KF模型预测值 真实值 LSTM-KF模型预测值 真实值 LSTM-KF模型预测值 1 4 806.00 4 892.41 70.56 74.69 18 499.00 18 894.95 96.67 96.88 2 4 806.00 4 892.41 71.11 74.89 18 519.00 18 983.17 96.11 96.03 3 4 849.00 4 936.37 71.39 74.89 18 499.00 19 082.20 95.83 95.25 4 4 877.00 4 964.85 71.67 74.87 18 519.00 19 189.04 95.00 94.16 5 4 949.00 5 037.90 71.94 74.82 18 499.00 19 300.63 94.72 93.36 6 4 992.00 5 081.46 72.50 74.97 18 517.00 19 414.51 94.44 92.60 7 5 021.00 5 111.03 72.78 74.90 18 499.00 19 529.68 93.89 91.75 8 5 065.00 5 155.61 73.06 74.84 18 517.00 19 644.79 93.33 90.96 9 5 094.00 5 185.20 73.61 74.95 18 498.00 19 759.37 93.06 90.37 10 5 138.00 5 229.78 73.89 74.89 18 517.00 19 872.41 92.50 89.69 11 5 168.00 5 260.35 74.17 74.83 18 497.00 19 983.59 92.22 89.22 12 5 212.00 5 304.92 74.72 74.98 18 517.00 20 092.02 91.39 88.53 13 5 242.00 5 335.48 75.00 74.95 18 497.00 20 197.32 91.11 88.16 14 5 287.00 5 381.00 75.28 74.99 18 515.00 20 294.13 90.56 87.74 15 5 317.00 5 411.49 75.56 75.04 18 498.00 20 388.78 90.28 87.49 16 5 363.00 5 457.98 76.11 75.30 18 515.00 20 480.60 89.72 87.10 17 5 393.00 5 488.45 76.39 75.39 18 496.00 20 569.20 89.17 86.74 18 5 439.00 5 534.91 76.94 75.69 18 515.00 20 654.33 88.89 86.53 19 5 470.00 5 566.35 77.22 75.82 18 496.00 20 735.88 88.61 86.33 20 5 516.00 5 612.77 77.50 75.98 18 514.00 20 813.79 87.78 85.86 21 5 547.00 5 644.17 77.78 76.15 18 496.00 20 888.06 87.50 85.68 22 5 594.00 5 691.55 78.33 76.54 18 513.00 20 958.73 86.94 85.37 23 5 625.00 5 722.92 78.61 76.77 18 496.00 21 025.86 86.67 85.20 24 5 672.00 5 770.26 78.89 77.03 18 512.00 21 089.52 86.11 84.90 25 5 704.00 5 802.59 79.44 77.50 18 496.00 21 149.84 85.56 84.60 26 5 751.00 5 849.89 79.72 77.81 18 512.00 21 206.93 85.00 84.31 27 5 783.00 5 882.19 80.00 78.16 18 495.00 21 260.98 84.72 84.15 28 5 832.00 5 931.46 80.56 78.74 18 511.00 21 312.05 84.17 83.86 29 5 864.00 5 963.72 80.83 79.16 18 495.00 21 360.27 83.89 83.71 30 5 912.00 6 011.96 81.11 79.64 18 511.00 21 405.73 83.33 83.42
下载: 导出CSV
-
[1] 张淼, 张琦, 张梓轩. 基于Q学习算法的高速铁路列车节能优化研究[J]. 铁道运输与经济, 2019, 41(12): 111-117. https://www.cnki.com.cn/Article/CJFDTOTAL-TDYS201912023.htmZHANG Miao, ZHANG Qi, ZHANG Zi-xuan. A study on energy-saving optimization for high-speed railways train based on Q-learning algorithm[J]. Railway Transport and Economy, 2019, 41(12): 111-117. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TDYS201912023.htm [2] 宁滨, 莫志松, 李开成. 高速铁路信号系统智能技术应用及发展[J]. 铁道学报, 2019, 41(3): 1-9. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201903002.htmNING Bin, MO Zhi-song, LI Kai-cheng. Application and development of intelligent technologies for high-speed railway signaling system[J]. Journal of the China Railway Society, 2019, 41(3): 1-9. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201903002.htm [3] 张淼, 赵阳, 曲以胜, 等. 青藏铁路移动闭塞列控安全技术方案研究[J]. 铁道运输与经济, 2020, 42(12): 77-82, 88. https://www.cnki.com.cn/Article/CJFDTOTAL-TDYS202012013.htmZHANG Miao, ZHAO Yang, QU Yi-sheng, et al. Safety technology plan of movable block train control system for Qinghai-Tibet Railway[J]. Railway Transport and Economy, 2020, 42(12): 77-82, 88. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TDYS202012013.htm [4] FELEZ J, VAQUERO-SERRANO M A. Virtual coupling in railways: a comprehensive review[J]. Machines, 2023, 11(5): 521. doi: 10.3390/machines11050521 [5] FLAMMINI F, MARRONE S, NARDONE R, et al. Towards railway virtual coupling[C]//IEEE. 2018 IEEE International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles and International Transportation Electrification Conference. New York: IEEE, 2018: 8607523. [6] DI MEO C, DI VAIO M, FLAMMINI F, et al. ERTMS/ETCS virtual coupling: proof of concept and numerical analysis[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(6): 2545-2556. doi: 10.1109/TITS.2019.2920290 [7] ZHAO H, DAI X W, ZHOU P, et al. Distributed robust event-triggered control strategy for multiple high-speed trains with communication delays and input constraints[J]. IEEE Transactions on Control of Network Systems, 2020, 7(3): 1453-1464. doi: 10.1109/TCNS.2020.2979862 [8] HE Y J, LYU J D, ZHANG D Q, et al. Trajectory prediction of urban rail transit based on long short-term memory network[C]//IEEE. 2021 IEEE International Intelligent Transportation Systems Conference. New York: IEEE, 2021: 173112. [9] YIN J T, NING C H, TANG T. Data-driven models for train control dynamics in high-speed railways: LAG-LSTM for train trajectory prediction[J]. Information Sciences, 2022, 600: 377-400. doi: 10.1016/j.ins.2022.04.004 [10] LIN C F, ULSOY A G, LEBLANC D J. Vehicle dynamics and external disturbance estimation for vehicle path prediction[J]. IEEE Transactions on Control Systems Technology, 2000, 8(3): 508-518. doi: 10.1109/87.845881 [11] DE MIGUEL M Á, ARMINGOL J M, GARCÍA F. Vehicles trajectory prediction using recurrent VAE network[J]. IEEE Access, 2022, 10: 32742-32749. doi: 10.1109/ACCESS.2022.3161661 [12] WANG Y, ZHANG D X, LIU Y, et al. Trajectory forecasting with neural networks: an empirical evaluation and a new hybrid model[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(10): 4400-4409. doi: 10.1109/TITS.2019.2943055 [13] LYTRIVIS P, THOMAIDIS G, AMDITIS A. Cooperative path prediction in vehicular environments[C]//IEEE. 11th International IEEE Conference on Intelligent Transportation Systems. New York: IEEE, 2008: 4732629. [14] 周兵, 赵婳, 吴晓建, 等. 基于外部动态环境的汽车碰撞危险估计算法研究[J]. 汽车工程, 2019, 41(3): 307-312. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201903010.htmZHOU Bing, ZHAO Hua, WU Xiao-jian, et al. A study on vehicle collision risk estimation algorithm based on external dynamic environment[J]. Automotive Engineering, 2019, 41(3): 307-312. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201903010.htm [15] TONG Q, HU J Q, CHEN Y L, et al. Long-term trajectory prediction model based on transformer[J]. IEEE Access, 2023, 11: 143695-143703. doi: 10.1109/ACCESS.2023.3343800 [16] REITER R, NURKANOVI AC'G A, BERNARDINI D, et al. A long-short-term mixed-integer formulation for highway lane change planning[J]. IEEE Transactions on Intelligent Vehicles, 2024, DOI: 10.1109/TIV.2024.3398805. [17] HUANG J, TAN H S. Vehicle future trajectory prediction with a DGPS/INS-based positioning system[C]//IEEE. 2006 American Control Conference. New York: IEEE, 2006: 1657655. [18] 张淼, 张琦, 刘文韬, 等. 一种基于策略梯度强化学习的列车智能控制方法[J]. 铁道学报, 2020, 42(1): 69-75. doi: 10.3969/j.issn.1001-8360.2020.01.010ZHANG Miao, ZHANG Qi, LIU Wen-tao, et al. A policy-based reinforcement learning algorithm for intelligent train control[J]. Journal of the China Railway Society, 2020, 42(1): 69-75. (in Chinese) doi: 10.3969/j.issn.1001-8360.2020.01.010 [19] SORSTEDT J, SVENSSON L, SANDBLOM F, et al. A new vehicle motion model for improved predictions and situation assessment[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1209-1219. doi: 10.1109/TITS.2011.2160342 [20] XU Y, YANG J, DU S Y. CF-LSTM: cascaded feature-based long short-term networks for predicting pedestrian trajectory[C]//AAAI. 34th AAAI Conference on Artificial Intelligence. Washington DC: AAAI, 2020: 12541-12548. [21] LI R M, ZHONG Z R, CHAI J, et al. Autonomous vehicle trajectory combined prediction model based on CC-LSTM[J]. International Journal of Fuzzy Systems, 2022, 24(8): 3798-3811. doi: 10.1007/s40815-022-01288-x [22] XING Y, LYU C, CAO D P. Personalized vehicle trajectory prediction based on joint time-series modeling for connected vehicles[J]. IEEE Transactions on Vehicular Technology, 2020, 69(2): 1341-1352. doi: 10.1109/TVT.2019.2960110 [23] KIM B D, KANG C M, KIM J, et al. Probabilistic vehicle trajectory prediction over occupancy grid map via recurrent neural network[C]//IEEE. 20th IEEE International Conference on Intelligent Transportation Systems. New York: IEEE, 2017: 399-404. [24] DEQUAIRE J, RAO D, ONDRUSKA P, et al. Deep tracking on the move: learning to track the world from a moving vehicle using recurrent neural networks[J]. arXiv. https://doi.org/10.48550/arXiv.1609.09365 .[25] XIE L, WEI Z L, DING D L, et al. Long and short term maneuver trajectory prediction of UCAV based on deep learning[J]. IEEE Access, 2021, 9: 32321-32340. doi: 10.1109/ACCESS.2021.3060783 [26] DEO N, TRIVEDI M M. Multi-modal trajectory prediction of surrounding vehicles with maneuver based LSTMs[C]//IEEE. 2018 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2018: 8500493. [27] ZHAO Z, CHEN W, WU X, et al. LSTM network: a deep learning approach for short-term traffic forecast[J]. IET Intelligent Transport Systems, 2017, 11(2): 68-75. doi: 10.1049/iet-its.2016.0208 [28] YU Y, SI X S, HU C H, et al. A review of recurrent neural networks: LSTM cells and network architectures[J]. Neural Computation, 2019, 31(7): 1235-1270. doi: 10.1162/neco_a_01199 [29] HIGGINS W T. A comparison of complementary and Kalman filtering[J]. IEEE Transactions on Aerospace and Electronic Systems, 1975, 11(3): 321-325. [30] ZHAO H, DAI X W, ZHANG Q, et al. Robust event-triggered model predictive control for multiple high-speed trains with switching topologies[J]. IEEE Transactions on Vehicular Technology, 2020, 69(5): 4700-4710. doi: 10.1109/TVT.2020.2974979 -


 点击查看大图
点击查看大图
计量
- 文章访问数: 497
- HTML全文浏览量: 131
- PDF下载量: 91
- 被引次数: 0
