

Typical feature recognition of dynamic anti-migration for wireless charging vehicles in road traffic systems
-
摘要: 针对无线充电车辆的动态特征识别和车辆分型问题,设计了基于车-路协同的混合电磁感应单元和地磁场感应单元的复合感应装置;在混合电磁感应单元中,为实现动态条件下的感应识别,提出了以谐振电流有效值为无线充电车辆特征的检测方法,并通过在电路拓扑中引入电场耦合与磁场耦合2种形式,同时加入高阶的双边电容电感补偿结构;为实现半开域耦合程度的量化分析,定义了线圈传输与极板传输的功率比参数,进而实现了偏移情况下的感应识别;以地磁传感器捕获不同车辆通过时的地磁场扰动信号为例,为改善非线性非平稳信号的提取效果,提出了地磁信号的集合经验模态分解(EEMD)法;引入曲线的特征向量提取法,以小型三厢轿车、中型两厢轿车、中型厢式货车和大型客车等4种车型作为典型试验样本,将不同车辆的地磁曲线信号转化为特征向量图谱,以实现车辆形状类型的判断。研究结果表明:混合电磁感应单元在测试条件下,沿线圈偏移方向的识别长度约为220 mm,垂直于线圈向外偏移方向的识别长度约为170 mm,其识别范围比单一的磁场耦合增大约62.8%;地磁场感应单元可实现长度为3.7~12.0 m、速度为2.78~16.67 m·s-1的车辆类型特征检测,通过地磁场感应单元与混合电磁感应单元相互配合,可有效提高无线充电车辆动态分型识别的可靠性,从而促进无线充电技术在道路交通电气化设施中的应用和发展。Abstract: In view of the dynamic feature recognition and classification problem of wireless charging vehicles, a composite induction device based on vehicle-road cooperation with a hybrid electromagnetic induction unit and a geomagnetic field induction unit was designed. In the hybrid electromagnetic induction unit, to realize the induction recognition under dynamic conditions, a detection method with the effective value of resonant current as the feature of wireless charging vehicles was put forward. Two forms of electric field coupling and magnetic field coupling were introduced into the circuit topology, alongside a high-order bilateral capacitor-inductor compensation structure. Additionally, to quantify the coupling degree in semi-open field scenarios, the power ratio parameters between coil transmission and plate transmission were defined, thus realizing the induction recognition under migration conditions. Geomagnetic field disturbance signals captured by geomagnetic sensors during different vehicles passage were taken as an example, and an ensemble empirical mode decomposition (EEMD) method for geomagnetic signals was applied to enhance the extraction effect of nonlinear and non-stationary signals. Furthermore, by introducing a feature vector extraction method for curves and taking small three-box sedans, medium two-box sedans, medium van trucks, and large carriages as typical test samples, the geomagnetic curve signals of various vehicles were transformed into feature vector spectra to determine the vehicle shape types. Research results show that under test conditions, the recognition length of the hybrid electromagnetic induction unit in the direction of coil migration is about 220 mm, the recognition length perpendicular to the direction of outward coil migration is about 170 mm, and the recognition range increases by approximately 62.8% compared to the single magnetic field coupling. Meanwhile, the geomagnetic field induction unit can detect the characteristics of vehicles with lengths ranging from 3.7 to 12.0 m and speeds ranging from 2.78 to 16.67 m·s-1. The reliability of dynamic classification and recognition for wireless charging vehicles can be effectively enhanced by the synergistic cooperation between the geomagnetic field induction unit and the hybrid electromagnetic induction unit, thus promoting the application and development of wireless charging technology in road traffic electrification facilities.
-
Key words:
- road traffic /
- wireless charging vehicle /
- electromagnetic field /
- geomagnetic field /
- migration /
- classification
-
0. 引言
现代道路交通系统中,以电动车辆为代表的载运装备动力清洁化的技术革新一直是国内外研究的热点。而电动车辆行驶时的动态无线电能传输技术可有效缓解里程焦虑,提升续航里程,这一技术引发了交通工程领域的深刻变革,相关的技术水平快速提高[1-4]。然而如何对动态无线充电车辆进行准确的特征识别,实现车辆分型是这一技术在智能交通系统中应用所面临的一个关键问题。
在传统车辆的分类方法中,车辆地磁信息检测技术得到了较多的研究和应用[5-7]。Wahlström等[8]对静止车辆的磁场分布情况进行了研究,同时研究了2个传感器节点偏离车辆中心轴时传感器的输出;Li等[9]通过分析采集的地磁扰动波形,提取了相对车长、波形总能量、波形平均能量等特征,采用分层决策树算法进行车型分类;He等[10]将传感器采集的三轴信息中2个方向的信息映射到二维空间中,通过闭合曲线变化趋势来判断车辆有无和车辆行驶方向;Balid等[11]研究了一种新型的交通监测智能车辆计数和分类传感器,用于车辆检测、速度和长度估计,并实时对车辆进行分类。国内学者中,马芳兰等[12]主要研究车型分类算法,通过动态基准值算法将车辆信号从原始信号中分离;张增超等[13]提出了一种改进的基于有向无环图的支持向量机车型分类算法;林渊博等[14]提出通过地磁传感器采集停车位磁场变化,结合状态机与自适应匹配算法来实现分类检测;叶青等[15]研究了一种基于环形线圈车辆电磁感应波形的新实时车型判别法, 结合了自适应共振神经网络进行聚类建模来动态分类车型。以上文献的车型分类方法中选择的特征有峰值、谷值、峰值谷值比、峰值时间、谷值时间、峰值谷值时间比、波形总能量、波形平均能量等。这些特征具有独立性、可区分性、数量少的优点,但是稳定性不高,需要通过算法提高分类精度,并且这些现有的分型方法不能识别无线充电车辆的特征。
故对于新能源无线充电车辆的分型而言,有必要研究更好的车辆特征信息捕捉技术。良好的车辆特征信息应具有可区分性强、稳定性高、特征之间具有独立性和特征数量少等特点。张献等[16]主要研究了动态无线供电系统的电能耦合机构与切换控制方法;Nagendra等[17-18]报告了一种电动车辆检测方法,该方法利用特设的路面发射器线圈产生的自由谐振电流识别无线充电车辆,这类发射器线圈必须足够靠近车辆才能感应谐振电流,并且发射器线圈的启动也需进行额外的时序控制;Wang等[19]研究了电动汽车充电中的动态无线电力传输系统接收器的位置传感,利用谐振器阵列输入阻抗识别接收器线圈位置,提出了简单有效的定位算法;Patil等[20]提出了一种新型正交线圈排列的电动汽车高速行驶检测系统,用于依次启动路侧的电能传输装置;Sonapreetha等[21]研究了非重叠线圈设置作为异物和车辆位置的无线固定电动汽车充电器检测;Deng等[22-23]通过捕获感应电压和电流的相角差等方法来检测电动汽车的边缘和位置;Hasan等[24]对时变的功率传输和效率分布进行解析描述,提出了不依赖线圈位置检测的电能传输控制算法;Lu等[25]对一种基于电容电感(CL)补偿的混合无线电能传输系统进行研究;Feng等[26]通过磁传感器进行道路交通监控,采用多个磁偶极子来模拟行驶中的车辆,通过对移动车辆造成的局部磁场扰动进行建模,用于车辆识别和速度估算;徐诗卉等[27]研究了一种新型方形线圈,提出了优化的近距离精确定位方法,解决了磁偶极子模型的传统定位方法误差较大的问题;Chen等[28]对动态无线电能传输技术的发展进行了综述性质的研究;白叶红等[29-30]利用交通仿真和非线性优化方法研究了充电车道的长度,最小化系统成本。
通过以上文献分析可以看出,与无线充电车辆特征相关的技术研究主要围绕在电动汽车动态无线充电的快速响应方法领域,实现相关车型分类的研究却较少涉及。
本文基于车-路协同搭建了一种基于混合电磁感应单元和地磁场感应单元的复合感应装置,完成无线充电车辆的磁电数据捕获,以实现其动态分型。其中,所提出的混合电磁感应单元由车载端的电感线圈和车载辅助电容极板,配合路面端敷设的电容极板和感应线圈组成,以谐振电流的有效值检测为特征实现无线充电车辆的识别。这一单元电路拓扑具有高阶的双边CL补偿结构,与传统的单一磁场感应或电场感应技术相比,这一混合耦合感应装置不仅可以节约电容极板元件的尺寸,还可以改善半开域耦合的缺陷,扩大检测范围,有效识别动态无线充电车辆。在地磁场感应单元中,提出了一种基于集合经验模态分解(Ensemble Empirical Mode Decomposition,EEMD)的地磁波形特征向量提取法,进一步实现具体的小型三厢轿车、中型两厢轿车、中型厢式货车和大型客车等4种形状类型的判断。这样,在地磁场感应单元与混合电磁感应单元相互“与”的逻辑配合下,这一车-路协同磁电特征捕获装置可实现车辆的无线充电信息和明显车辆型式等2个典型特征的动态抗偏移识别,有助于公路交通系统的智能调度和管理。
1. 系统组成
无线充电车辆动态分型系统由路面感应、中继节点和后台数据分析等3个子系统构成,而本文主要研究的路面感应子系统包括混合电磁场感应单元和地磁场感应单元2部分。
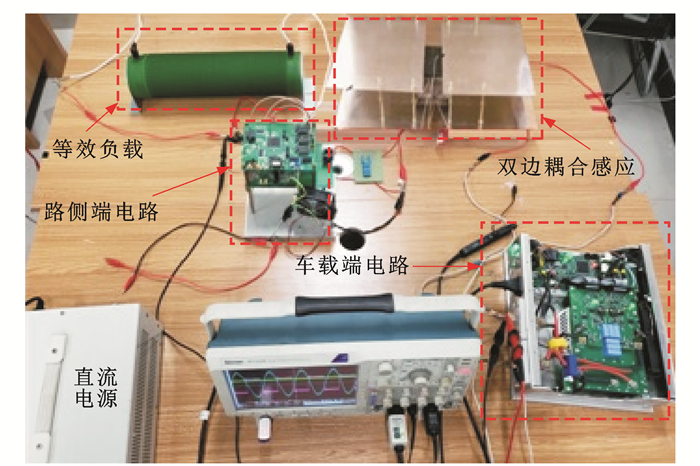
混合电磁场感应单元由车载侧和路侧2个部分配合组成。车载侧利用车载无线充电的感应线圈并添加辅助电容极板去传输电能,而路侧部分则由路面敷设的电容极板、电能接收和信号传输电路组成。地磁场感应单元由若干个三轴地磁传感器组成。系统的中继节点可采用WiFi路由器安装在灯杆或路面立杆,通过上位机软件实现传感数据的接收、处理和车辆信息解算,得出无线充电车辆的类型。复合感应系统的场景如图 1所示。
2. 混合电磁感应单元
2.1 电路拓扑
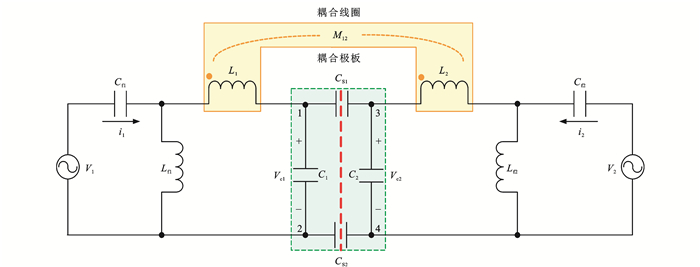
本文的混合电磁感应电路拓扑结构如图 2所示,图中:L1为混合电磁感应单元电路的电感线圈的电感量;L2为这一感应单元电路在路侧端感应线圈的电感量;M12为线圈之间的互感;Vin为这一感应单元在车载侧设定的独立直流电压;Lf1和Lf2分别为原、副边谐振网络的补偿电感;C1和C2分别为原、副边补偿电容;Cf1和Cf2分别为原、副边谐振网络并联补偿电容;C0为路侧感应电路的滤波电容;CS1和CS2均为感应系统中耦合极板的等效电容;P1、P3均为一次侧极板;P2、P4均为二次侧极板,且由红色虚线分隔开,P1和P2耦合极板放在车载底盘,而P3和P4敷设在路侧表面,由路侧端接收感应电能并通过信号传输模块发送给中继节点;S1~S4均为金属氧化物半导体场效应管;D1~D4均为整流二极管;V1为原边谐振网络等效的高频交流电压;V2为路侧端谐振网络等效的输出用交流电压;i1为流过车载侧并联补偿电容的电流;i2为流过路侧并联补偿电容的电流。
图 2中,L1可以选择利用车载侧无线电能接收端的充电耦合线圈得到,即感应单元与充电机构两者共用主电感。而两者的电路结构和谐振参数都不同,实际上各自独立,互不影响。
值得指出的是,这一混合电磁感应单元的电路拓扑本身含有2种耦合形式,即极板之间形成的电场耦合和线圈之间形成的磁场耦合,其中电场耦合为电容电能传输(Capacitive Power Transfer,CPT),磁场耦合为感应电能传输(Inductive Power Transfer, IPT),且该拓扑具有高阶的双边CL补偿结构。与传统的单一磁场感应或电场感应技术相比,这一混合耦合感应装置不仅可以节约电容极板元件的尺寸,而且有助于改善半开域耦合缺陷,扩大动态无线充电车辆的有效识别范围。
2.2 混合电磁耦合器设计
混合电磁感应电路的简化拓扑如图 3所示,系统输入在经过车载端的高频逆变器后会产生方波电压,C1和C2两端电压分别为Vc1和Vc2。
 图 3 混合电磁感应电路的简化拓扑Figure 3. Simplified topology of hybrid electromagnetic induction circuit
图 3 混合电磁感应电路的简化拓扑Figure 3. Simplified topology of hybrid electromagnetic induction circuit这一电路得到的输出功率Pout包含电场耦合输出功率PCPT和磁场耦合输出功率PIPT两部分,即
Pout=PCPT+PIPT (1) {PCPT=CSCf1Cf2ω|V1||V2|C1CS+C1C2+C2CSPIPT=M12|V1||V2|ωLf1Lf2 (2) M12=k√L1L2 (3) 式中:CS为等效电容;ω为系统工作角频率;k为耦合系数。
由于C1和C2都远大于CS,则电路的输入功率Pin=Pout,因此,可将式(1)化简为
Pin =Pout ≈ωCSCf1Cf2|V1||V2|C1C2+k√L1L2|V1||V2|ωLf1Lf2 (4) 将IPT子系统和CPT子系统传输的功率比用rI-C表示,则可得
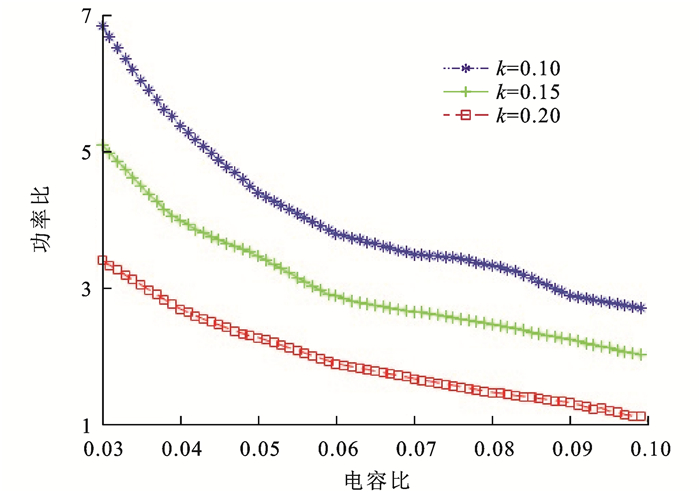
rI−C=PIPTPCPT=(CSC2+C2C1+CSC1)M12CSCf2Cf1Lf2Lf1ω2 (5) 将CS和C1之间的电容比kc定义为kc=CS/C1,通过对式(5)进一步化简和分析,在车载端和路侧端线圈的耦合系数k分别取0.10、0.15和0.20时,可得出线圈与极板传输的功率比rI-C与电容比kc关系曲线,如图 4所示。若k=0.15,则rI-C的变化范围是2.00~5.10。
 图 4 功率比与电容比的关系曲线Figure 4. Relationship curves between power ratio and capacitance ratio
图 4 功率比与电容比的关系曲线Figure 4. Relationship curves between power ratio and capacitance ratio2.3 开域耦合状态
在感应线圈出现位置偏移时,线圈完全错开属于开域耦合,其场强远小于闭域耦合,从而难以检测。可以用有限元方法对磁场强度φ用场强梯度泛函数F(·)表征
F(φ)=m∑e=1F(φe) (6) 式中:φe为第e个分格单元的磁场强度;m为分格的单元总数。
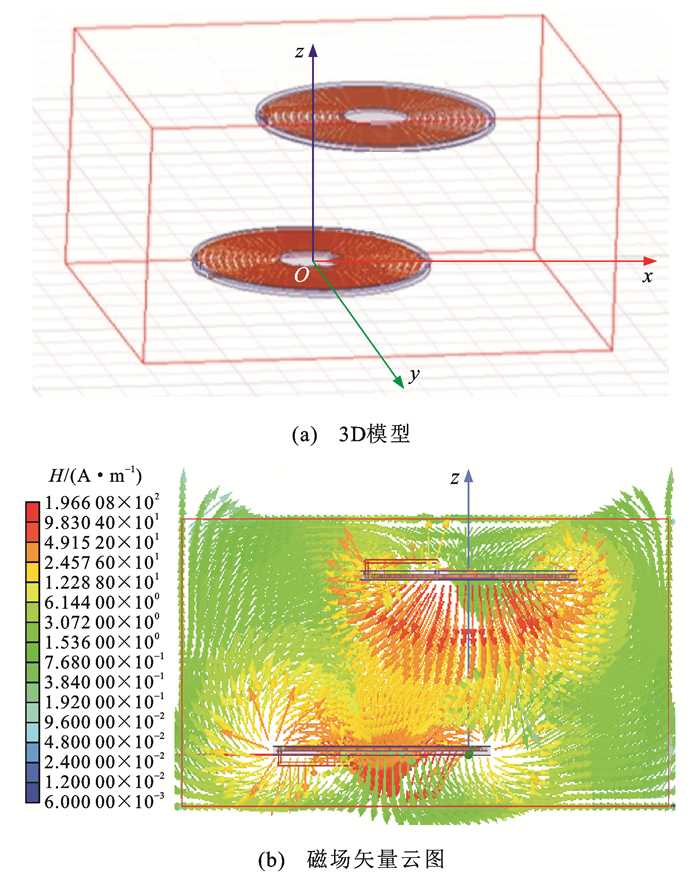
介于开域和闭域之间,称之为半开域耦合。建立一个以车载端线圈中心为原点O的Oxyz坐标系,其中,沿线圈水平向右为x轴正方向,垂直于线圈平面向上为z轴正方向,垂直于xOz平面向外为y轴正方向。图 5是在本文的试验条件下,当对称线圈的一侧沿x轴正方向偏移11 cm时,感应线圈系统的半开域磁耦合的3D模型及其磁场强度H的云图。
 图 5 耦合线圈半开域状态下的3D模型与磁场矢量云图Figure 5. 3D model and magnetic field vector cloud image of coupling coil at semi-open domain condition
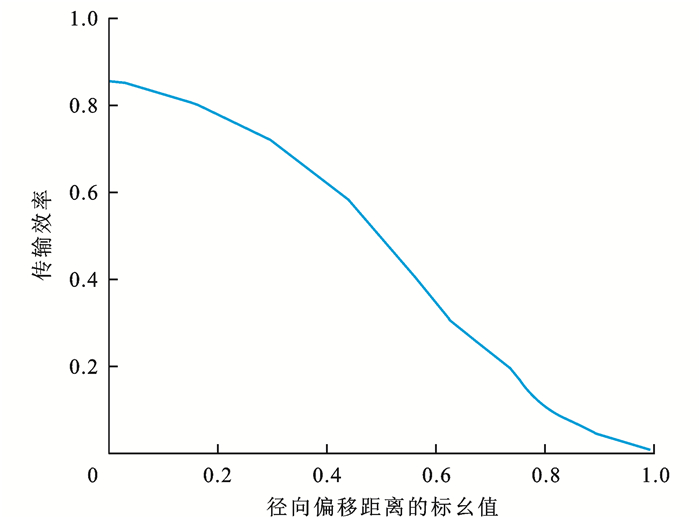
图 5 耦合线圈半开域状态下的3D模型与磁场矢量云图Figure 5. 3D model and magnetic field vector cloud image of coupling coil at semi-open domain condition经过数值分析,可得出电感线圈径向偏移后,感应信号的无线传输效率随径向偏移距离变化的曲线,如图 6所示,图中采用了单位化的表征方法,横坐标是径向偏移距离的标幺值σ。
 图 6 传输效率随径向偏移距离变化的曲线Figure 6. Change curve of transmission efficiency with radial offset distance
图 6 传输效率随径向偏移距离变化的曲线Figure 6. Change curve of transmission efficiency with radial offset distance以r为耦合电感线圈的外圈半径,x1为电感线圈的径向偏移距离,则σ为
σ=x12r (7) 可见,与完全闭域耦合相比,在半开域耦合情况下的系统场分布变化复杂,出现更多的边缘通量和磁漏,均匀性变差,平均磁场强度降低约26%。而在径向偏移使线圈完全错开的全开域情况下,系统感应电能的传输效率接近为0,不能实现有效感应。
可以加入电容极板所形成的电场耦合,以对磁耦合偏移的缺失进行补充。在磁场全开域的耦合状态下,混合电磁感应的电场耦合机构结构3D视图如图 7所示,图中:车载侧作为发射端由2块电场极板P1、P2和线圈L1组成,路侧端由极板P3、P4和线圈L2进行感应接收,上下结构完全对称;d为相邻电容极板的水平距离;h为电容极板的z向间隙距离。图 7中,假定作为车载端的上极板向右侧偏移一个x1的距离,则橘色线框是此时平板电容的有效极板范围,其x轴向的有效极板边长是一个变化量c。
 图 7 混合电磁感应的半开域耦合Figure 7. Hybrid electromagnetic induction in a semi-open domain coupling
图 7 混合电磁感应的半开域耦合Figure 7. Hybrid electromagnetic induction in a semi-open domain coupling在不同的半开域和全闭域2种耦合状态下,线圈与极板传输的功率比不同。在本文系统测试的参数条件下,rI-C与其输出电压基波有效值U2的关系曲线如图 8所示,水平移动车载端电容极板的位置,使耦合机构处于rI-C= 0.5的半开域耦合条件下,检测到输出直流电压为6.0 V,在rI-C≥2.0后,系统进入全闭域状态,系统等效负载的输出直流电压为9.6 V。
 图 8 功率比与路侧输出电压的关系曲线Figure 8. Relationship curve between power ratio and roadside output voltage
图 8 功率比与路侧输出电压的关系曲线Figure 8. Relationship curve between power ratio and roadside output voltage3. 地磁场感应单元
3.1 基于EEMD的地磁扰动信号预处理
通过地磁传感器可捕获车辆通过时的地磁场扰动信号,从而得出车辆的分型信息。然而这一地磁扰动信号内通常含有叠加的杂波,不利于被测信号的特征提取。
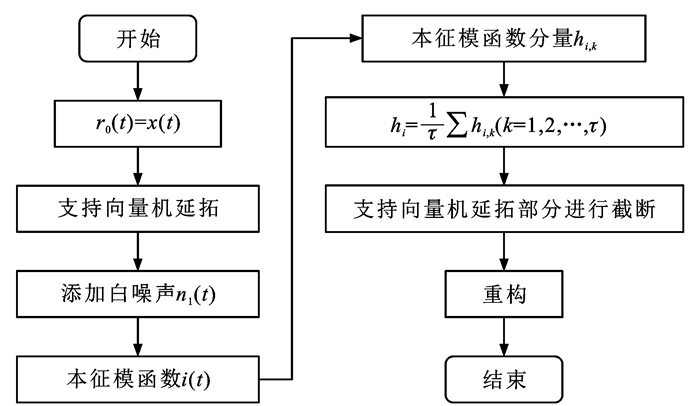
EEMD法在分析非线性非平稳信号方面具有较高信噪比的优势,本文据此使用一种新的基于EEMD的地磁场扰动信号数据滤波方法,该方法主要有8个步骤,主要流程如图 9所示:x(t)为t时刻的原始信号;r0(t)为t时刻的初始剩余信号;n1(t)为t时刻的白噪声;i(t)为对t时刻原始复杂信号分解的i个本征模函数(i =1, 2,…,n)。为了抑制端点效应,对每个本征模函数都进行了k次的平行延拓极值,hi为其分量的集合平均值。
 图 9 基于EEMD的地磁扰动信号预处理流程Figure 9. Flow of geomagnetic disturbance signal preprocessing based on EEMD
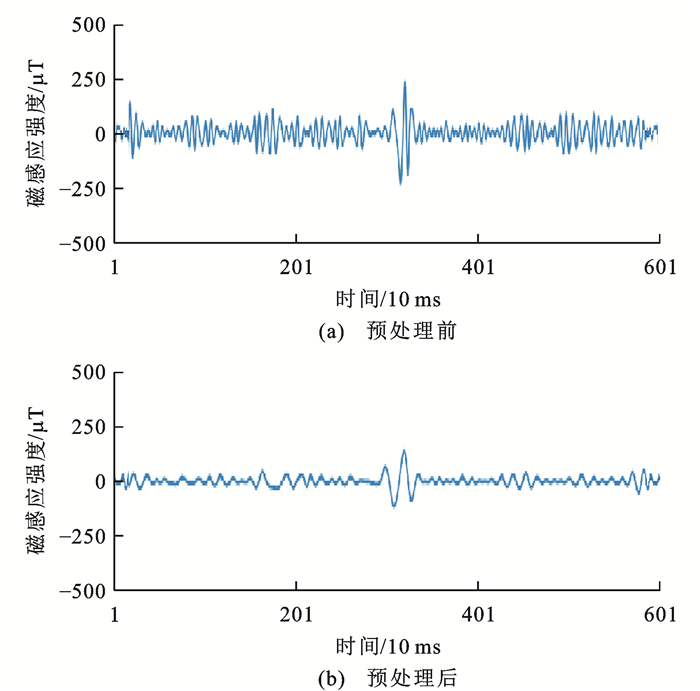
图 9 基于EEMD的地磁扰动信号预处理流程Figure 9. Flow of geomagnetic disturbance signal preprocessing based on EEMD其中,得到i(t)的过程如图 10所示,图中:hj(t)为t时刻循环累加j次的集合平均值。地磁传感器的输出信号在滤波预处理前后进行的对比如图 11所示。
 图 11 基于EEMD的地磁扰动信号预处理Figure 11. Geomagnetic disturbance signal preprocessing based on EEMD
图 11 基于EEMD的地磁扰动信号预处理Figure 11. Geomagnetic disturbance signal preprocessing based on EEMD通过集合经验模态分解EEMD法的数据处理,被测地磁场扰动信号能较好地抑制杂波。
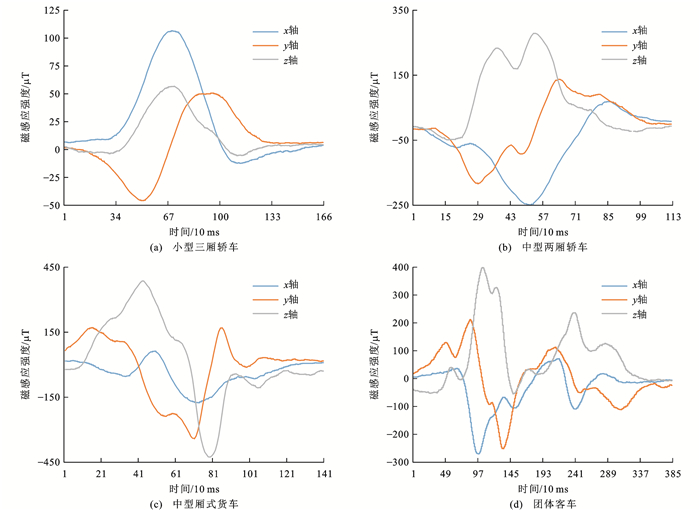
图 11中,纵坐标以微特斯拉(μT)为度量单位,用于显示乘用车的地磁扰动信号,这一度量单位约为地磁场平均磁感应强度的1/50。横坐标是传感器节点的采样周期,设为10 ms。城市通行中的车辆,速度一般介于10~60 km·h-1,同时根据车辆分类的国家标准,城市内常见车辆的长度在3.7~12.0 m,则车辆对传感器节点的扰动时间范围在0.22~4.30 s不等,曲线的数据长度在22~430。通过扰动曲线所反映的信号宽度,亦可在测速的前提下判断被测车辆的长度。
3.2 典型车辆的地磁扰动信号捕获
《汽车、挂车及汽车列车的术语和定义》(GB/T 3730—2022)和交通运输行业标准《营运客车类型划分及等级评定》(JT/T 325—2018)是中国车辆分类的2个专业标准。本文考虑城市内常见车辆类型和所获取的样本量,按照以上2个标准,选取某小型三厢轿车、中型两厢轿车、中型厢式货车和大型客车等4种车型作为典型试验样本,其外形尺寸如表 1所示。对这4种车辆类型进行分类亦可以实时了解城市道路的交通状态,具有较好的实用性。
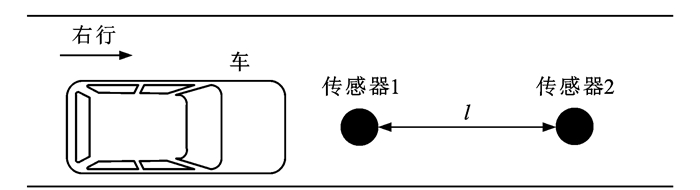
表 1 典型测试车辆的外形尺寸Table 1. Dimensions of typical test vehiclesmm 序号 车身型式 外形尺寸:长×宽×高 1 小型三厢轿车 4 300×1 705×1 460 2 中型两厢轿车 4 733×1 839×1 673 3 中型厢式货车 6 995×2 420×3 650 4 团体客车 10 490×2 500×3 600 本文采用2个地磁三轴传感器检测,传感器埋设在需要检测的道路中央。双传感器的位置布置如图 12所示,2个传感器的间距l小于一辆车的车长,以保证2个地磁车辆检测器在检测时间上的连续性。
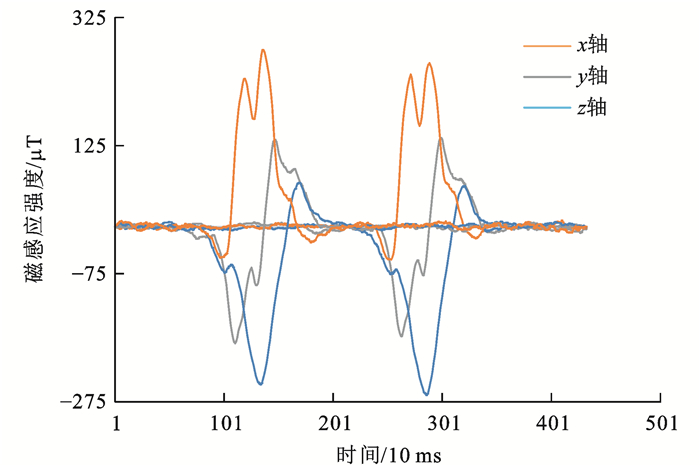
使用双地磁传感器捕获的一种中型两厢轿车的地磁扰动信息如图 13所示。
 图 13 双地磁传感器采集某车辆的地磁扰动信息Figure 13. Geomagnetic disturbance information of vehicle collected by dual ground magnetic sensors
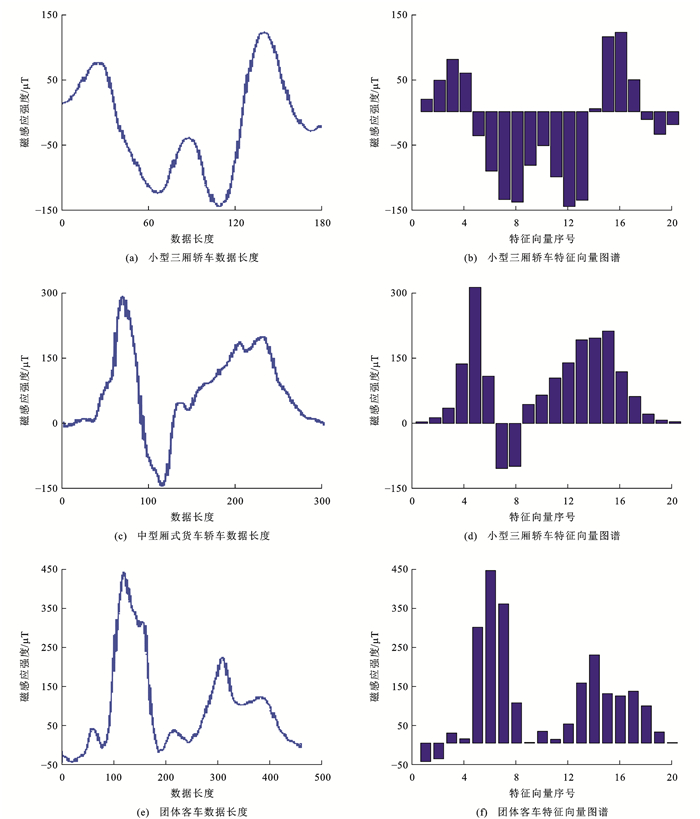
图 13 双地磁传感器采集某车辆的地磁扰动信息Figure 13. Geomagnetic disturbance information of vehicle collected by dual ground magnetic sensors从背景磁场中分离出来的小型三厢轿车、中型两厢轿车、中型厢式货车和大型客车等4种典型测试车辆的三轴地磁扰动曲线如图 14所示,可以看出不同的车辆类型其扰动波形显著不同,从而反映车辆的长度特征信息。
 图 14 基于EEMD滤波的4种典型车型地磁扰动曲线Figure 14. Geomagnetic disturbance curves of 4 typical vehicle models based on EEMD filtering
图 14 基于EEMD滤波的4种典型车型地磁扰动曲线Figure 14. Geomagnetic disturbance curves of 4 typical vehicle models based on EEMD filtering3.3 车辆尺寸特征信息提取
车辆通过传感器节点时,由于车辆长度和速度不同,对传感器节点的扰动时间也不相同,因此,曲线的长度也不相同。本文采用曲线的特征向量直接提取法,即将车辆地磁曲线转化为特征向量。
已知a(·)为融合后的车辆地磁扰动数据组,总长度为I。fb为第b个特征向量,b=1, 2, …, N。将a(·)依次平均分成N份,每份的长度为Δn,即
Δn=I/N (8) 对平分后的b组数据取平均得到第b个特征向量的值,计算式为
f1=[a(1)+⋯+a(⌊bΔn⌋)+a(⌈bΔn⌉)(bΔn−⌊bΔn⌋)]/Δnb=1 (9) fb={a[⌈(b−1)Δn⌉][⌈(b−1)Δn⌉−(b−1)Δn]+a[⌈(b−1)Δn⌉+1]+⋯+a[⌈bΔn⌉][⌈bΔn⌉−bΔn]}/Δnb=2,⋯,N−1 (10) fN={a[⌈(b−1)Δn⌉][⌈(b−1)Δn⌉−(b−1)Δn)]+⋯a(b)}/Δnb=N (11) 设定N =15,以小型三厢轿车的x轴地磁扰动曲线为分析对象,行使速度为40 km·h-1,对被测车辆进行特征向量的提取,获得的图谱如图 15所示。
4. 系统测试
系统测试分别对混合电磁感应单元、地磁场感应单元进行独立测试,分别实现无线充电特征和车型尺寸特征的识别,其中车型尺寸特征识别在学校的汽车试验场完成。
4.1 混合电磁感应单元测试
通过一个设计案例可对本文的混合电磁感应单元进行测试。设定该单元的工作频率为600 kHz,车载端提供12V的Vin车内电源条件。全闭域条件下的耦合系数k设定为0.15,各元件的主要参数值参见表 2,表中:N1和N2分别为2个感应线圈的匝数。
表 2 混合电磁感应电路各元件的参数值Table 2. Parameters of hybrid electromagnetic circuit结构参数 数值 结构参数 数值 Cf1/nF 4.26 C2/pF 394.7 Cf2/nF 5.18 CS/pF 4.5 Lf1/μH 16.53 M12/μH 58.18 Lf2/μH 13.6 N1 56 L1/μH 843.27 N2 12 L2/μH 178.42 d/mm 150 C1/pF 83.51 h/mm 180 搭建的试验电路如图 16所示,车载端的功率单元选用C2M0080120D碳化硅器件,路侧端的功率单元选用MUR1520G快恢复型二极管。
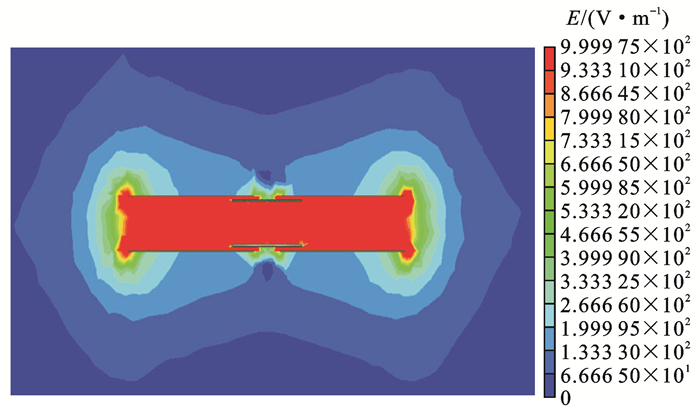
混合电磁感应单元在闭域耦合下的电容极板间的电场强度E和磁感应强度B分布分别如图 17、18所示,可实现电磁感应能量的传递。
 图 17 电容极板间的电场强度分布Figure 17. Distribution of electric field strength between capacitor plates
图 17 电容极板间的电场强度分布Figure 17. Distribution of electric field strength between capacitor plates 图 18 电感线圈间的磁感应强度分布Figure 18. Distribution of magnetic induction intensity between inductor coils
图 18 电感线圈间的磁感应强度分布Figure 18. Distribution of magnetic induction intensity between inductor coils图 19是图 2中车载端的输入电压V1和路侧端感应电流i2的波形。其中,图 19(b)前半部分是半开域耦合范围时检测到i2的波形。在进入全闭域范围时,i2的波形见图 19(b)后半部分,其有效值为0.85A。结合图 7的半开域和全闭域的耦合分析,以路侧端这一感应谐振电流的有效值为特征,通过电流霍尔对其进行数值检测,并设定识别阈值,可在偏移后的半开域耦合条件下实现无线充电车辆的特征识别。
 图 19 车载侧输入电压和路侧输出谐振电流波形Figure 19. Waveforms of onboard input voltage and roadside output resonance current
图 19 车载侧输入电压和路侧输出谐振电流波形Figure 19. Waveforms of onboard input voltage and roadside output resonance current在电感线圈径向偏移导致的全开域条件下,则以电容极板的电场耦合感应为主,此时的电容极板耦合面积为识别范围的初始条件。
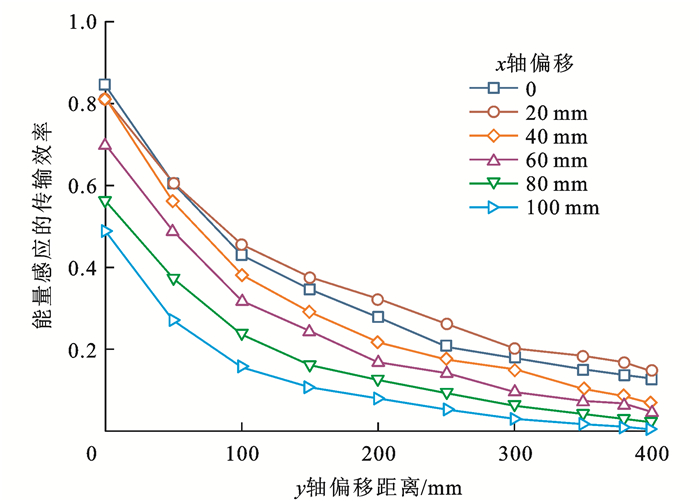
若车载侧动极板进一步x轴向偏移,则可通过研究电容极板的偏移距离与感应能量传输效率的变化关系得出偏移范围,即识别范围。相应的偏移距离与能量感应传输效率的变化变化曲线如图 20所示。
 图 20 动极板偏移距离与能量感应传输效率的变化曲线Figure 20. Change curves of moving plate offset distance and energy induction transmission efficiency
图 20 动极板偏移距离与能量感应传输效率的变化曲线Figure 20. Change curves of moving plate offset distance and energy induction transmission efficiency从图 20中可以看出,全开域条件下,车载侧的电容动极板在x轴方向偏移100 mm后,感应信号的传输效率为49.2%。由于极板间还存在交叉耦合问题,经测试x轴方向的有效识别范围约为220 mm。若x轴不偏移,仅y轴方向上偏移,则不存在极板的交叉耦合,这种情况下,以感应信号传输效率的30.0%为有效感应,则其可识别的偏移范围约为170 mm。与单一的磁场耦合识别相比,增加电容极板后的感应单元的识别范围将扩大约62.8%,因此,这一混合电磁感应单元,有助于扩大车辆在行驶偏移条件下的识别范围。而不同的电容极板设计,其识别的偏移范围不同,系统应根据功率比参数权衡确定。
4.2 地磁场感应单元测试
在学校的汽车试验场进行地磁场感应单元测试,场景如图 21所示。
地磁传感器采用双MMC3416模块,并设定被测车辆的长度在3.7~12.0 m,速度在2.78~16.67 m·s-1。传感器节点的采样周期为10 ms,则曲线的数据长度在22~430,N=20时,捕获的小、中、大3种车型的磁扰动曲线特征向量提取图谱如图 22所示。
 图 22 不同车辆的地磁扰动曲线及其特征向量对比Figure 22. Comparison of geomagnetic disturbance curves and their characteristic vectors for different vehicles
图 22 不同车辆的地磁扰动曲线及其特征向量对比Figure 22. Comparison of geomagnetic disturbance curves and their characteristic vectors for different vehicles5. 结语
(1) 设计了一种基于混合电磁感应单元和地磁场感应单元的复合感应装置,在无线充电车辆行驶偏移条件下,完成相关典型车型的磁电特征数据捕获。其中,混合电磁感应单元用于实现车辆无线充电特征的识别,地磁场感应单元用于实现车辆型式尺寸特征的识别。
(2) 混合电磁感应单元以实现路侧的谐振电流有效值检测为特征目标,其电路拓扑含有线圈之间形成的磁场耦合和极板之间形成电场耦合等2种耦合形式,拓扑具有高阶的双边CL补偿结构。与传统的单一磁场感应或电场感应技术相比,这一混合耦合感应装置不仅可以节约电容极板元件的尺寸,又有助于改善半开域耦合问题,有助于扩大车辆偏移条件下的识别范围。
(3) 对于地磁场感应单元,提出了一种地磁信号的集合经验模态分解法,以改善非线性非平稳信号的提取效果,并引入曲线的特征向量提取法,以小型三厢轿车、中型两厢轿车、中型厢式货车和大型客车等4种车型的尺寸作为典型试验样本,将不同车辆的地磁曲线信号转化为特征向量图谱,以实现车辆形状类型的准确判断。
(4) 若在路面分布敷设多组混合电磁感应单元,这一检测装置可提高对无线充电车辆特征的动态捕捉能力。然而,这一装置在实际应用中较容易受到外界因素的干扰,如异物干扰、电容耦合器的边缘效应及频率漂移等问题,这需要对装置的耦合机构参数进行多目标优化设计以改善系统鲁棒性。
-

图 3 混合电磁感应电路的简化拓扑
Figure 3. Simplified topology of hybrid electromagnetic induction circuit

图 4 功率比与电容比的关系曲线
Figure 4. Relationship curves between power ratio and capacitance ratio

图 5 耦合线圈半开域状态下的3D模型与磁场矢量云图
Figure 5. 3D model and magnetic field vector cloud image of coupling coil at semi-open domain condition

图 6 传输效率随径向偏移距离变化的曲线
Figure 6. Change curve of transmission efficiency with radial offset distance

图 7 混合电磁感应的半开域耦合
Figure 7. Hybrid electromagnetic induction in a semi-open domain coupling

图 8 功率比与路侧输出电压的关系曲线
Figure 8. Relationship curve between power ratio and roadside output voltage

图 9 基于EEMD的地磁扰动信号预处理流程
Figure 9. Flow of geomagnetic disturbance signal preprocessing based on EEMD

图 11 基于EEMD的地磁扰动信号预处理
Figure 11. Geomagnetic disturbance signal preprocessing based on EEMD

图 13 双地磁传感器采集某车辆的地磁扰动信息
Figure 13. Geomagnetic disturbance information of vehicle collected by dual ground magnetic sensors

图 14 基于EEMD滤波的4种典型车型地磁扰动曲线
Figure 14. Geomagnetic disturbance curves of 4 typical vehicle models based on EEMD filtering

图 17 电容极板间的电场强度分布
Figure 17. Distribution of electric field strength between capacitor plates

图 18 电感线圈间的磁感应强度分布
Figure 18. Distribution of magnetic induction intensity between inductor coils

图 19 车载侧输入电压和路侧输出谐振电流波形
Figure 19. Waveforms of onboard input voltage and roadside output resonance current

图 20 动极板偏移距离与能量感应传输效率的变化曲线
Figure 20. Change curves of moving plate offset distance and energy induction transmission efficiency

图 22 不同车辆的地磁扰动曲线及其特征向量对比
Figure 22. Comparison of geomagnetic disturbance curves and their characteristic vectors for different vehicles
表 1 典型测试车辆的外形尺寸
Table 1. Dimensions of typical test vehicles
mm 序号 车身型式 外形尺寸:长×宽×高 1 小型三厢轿车 4 300×1 705×1 460 2 中型两厢轿车 4 733×1 839×1 673 3 中型厢式货车 6 995×2 420×3 650 4 团体客车 10 490×2 500×3 600  下载: 导出CSV
下载: 导出CSV
表 2 混合电磁感应电路各元件的参数值
Table 2. Parameters of hybrid electromagnetic circuit
结构参数 数值 结构参数 数值 Cf1/nF 4.26 C2/pF 394.7 Cf2/nF 5.18 CS/pF 4.5 Lf1/μH 16.53 M12/μH 58.18 Lf2/μH 13.6 N1 56 L1/μH 843.27 N2 12 L2/μH 178.42 d/mm 150 C1/pF 83.51 h/mm 180
下载: 导出CSV
-
[1] AFRIDI K. The future of electric vehicle charging infrastructure[J]. Nature Electronics, 2022, 5(2): 62-64. doi: 10.1038/s41928-022-00726-w [2] SIKANDAR M S, DARWISH M, MAROUCHOS C. Review of wireless charging of EV[C]//IEEE. 2022 57th International Universities Power Engineering Conference (UPEC). New York: IEEE, 2022: 1-4. [3] PATIL D, MCDONOUGH M K, MILLER J M, et al. Wireless power transfer for vehicular applications: overview and challenges[J]. IEEE Transactions on Transportation Electrification, 2018, 4(1): 3-37. doi: 10.1109/TTE.2017.2780627 [4] 王建辉. 智能无线充电的技术及其应用[J]. 数字技术与应用, 2020, 38(8): 54-57.WANG Jian-hui. Technology and applications of intelligent wireless charging[J]. Digital Technology and Application, 2020, 38(8): 54-57. (in Chinese) [5] EL MELIGY A O, ELGHANAM E A, HASSAN M S, et al. Deployment optimization of dynamic wireless chargers for electric vehicles[C]//IEEE. 2022 IEEE Transportation Electrification Conference and Expo (ITEC). New York: IEEE, 2022: 290-294. [6] SHANMUGAM Y, NARAYANAMOORTHI R, VISHNURAM P, et al. A systematic review of dynamic wireless charging system for electric transportation[J]. IEEE Access, 2022, 10: 133617-133642. doi: 10.1109/ACCESS.2022.3227217 [7] 石文帅. 基于地磁传感器的车辆信息检测系统研究[D]. 西安: 长安大学, 2019.SHI Wen-shuai. Research on vehicle information detection system based on geomagnetic sensor[D]. Xi'an: Chang'an University, 2019. (in Chinese) [8] WAHLSTRÖM N, HOSTETTLER R, GUSTAFSSON F, et al. Classification of driving direction in traffic surveillance using magnetometers[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(4): 1405-1418. doi: 10.1109/TITS.2014.2298199 [9] LI Hai-jian, DONG Hong-hui, JIA Li-min, et al. Vehicle classification with single multi-functional magnetic sensor and optimal MNS-based CART[J]. Measurement, 2014, 55: 142-152. doi: 10.1016/j.measurement.2014.04.028 [10] HE H, MAO C Q, PAN H Y, et al. Vehicle detection system based on magnetoresistive sensor[J]. Applied Mechanics and Materials, 2015, 743: 277-280. doi: 10.4028/www.scientific.net/AMM.743.277 [11] BALID W, TAFISH H, REFAI H H. Intelligent vehicle counting and classification sensor for real-time traffic surveillance[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(6): 1784-1794. doi: 10.1109/TITS.2017.2741507 [12] 马芳兰, 张红霞, 徐武德, 等. 基于地磁传感器的车辆检测算法研究[J]. 自动化仪表, 2017, 38(11): 84-87.MA Fang-lan, ZHANG Hong-xia, XU Wu-de, et al. Research on vehicle detection algorithm based on geomagnetic sensor[J]. Process Automation Instrumentation, 2017, 38(11): 84-87. (in Chinese) [13] 张增超, 李强, 孙红雨, 等. 基于地磁传感器和UWB技术的停车位车辆检测方法与实现[J]. 传感技术学报, 2019, 32(12): 1917-1922.ZHANG Zeng-chao, LI Qiang, SUN Hong-yu, et al. Parking vehicle detection method and implementation based on geomagnetic sensor and UWB technology[J]. Chinese Journal of Sensors and Actuators, 2019, 32(12): 1917-1922. (in Chinese) [14] 林渊博, 姚剑敏, 林伟. 基于地磁传感器的停车位检测算法研究[J]. 电气开关, 2019, 57(4): 42-44. doi: 10.3969/j.issn.1004-289X.2019.04.011LIN Yuan-bo, YAO Jian-min, LIN Wei. Research on parking space detection algorithm based on geomagnetic sensor[J]. Electric Switchgear, 2019, 57(4): 42-44. (in Chinese) doi: 10.3969/j.issn.1004-289X.2019.04.011 [15] 叶青, 刘剑雄, 刘铮, 等. 基于电磁感应的道路车辆车型在线分类方法研究[J]. 湖南大学学报(自然科学版), 2019, 46(12): 41-49.YE Qing, LIU Jian-xiong, LIU Zheng, et al. Research on online classification method of road vehicle types based on electromagnetic induction[J]. Journal of Hunan University (Natural Sciences), 2019, 46(12): 41-49. (in Chinese) [16] 张献, 王杰, 杨庆新, 等. 电动汽车动态无线供电系统电能耦合机构与切换控制研究[J]. 电工技术学报, 2019, 34(15): 3093-3101.ZHANG Xian, WANG Jie, YANG Qing-xin, et al. The power coupling mechanism and switching control for dynamic wireless power supply system of electric vehicle[J]. Transactions of China Electrotechnical Society, 2019, 34(15): 3093-3101. (in Chinese) [17] NAGENDRA G R, CHEN L, COVIC G A, et al. Detection of EVs on IPT highways[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2014, 2(3): 584-597. doi: 10.1109/JESTPE.2014.2308307 [18] AZAD A N, ECHOLS A, KULYUKIN V A, et al. Analysis, optimization, and demonstration of a vehicular detection system intended for dynamic wireless charging applications[J]. IEEE Transactions on Transportation Electrification, 2019, 5(1): 147-161. doi: 10.1109/TTE.2018.2870339 [19] WANG Ning, YANG Qing-xin, ZHANG Heng-jun. RETRACTED: modeling and analysis of dynamic wireless charging for electric vehicles under different working scenarios[J]. International Journal of Electrical Engineering and Education, 2023, 60(S1): 912-922. [20] PATIL D, MILLER J M, FAHIM B, et al. A coil detection system for dynamic wireless charging of electric vehicle[J]. IEEE Transactions on Transportation Electrification, 2019, 5(4): 988-1003. doi: 10.1109/TTE.2019.2905981 [21] SONAPREETHA M R, JEONG S Y, CHOI S Y, et al. Dual-purpose non-overlapped coil sets as foreign object and vehicle location detections for wireless stationary EV chargers[C]// IEEE. 2015 IEEE PELS Workshop on Emerging Technologies: Wireless Power (2015 WoW). New York: IEEE, 2015: 1-7. [22] DENG Q J, LIU J T, CZARKOWSKI D, et al. Edge position detection of on-line charged vehicles with segmental wireless power supply[J]. IEEE Transactions on Vehicular Technology, 2017, 66(5): 3610-3621. [23] YUAN Zhao-yang, YANG Qing-xin, ZHANG Xian, et al. High-order compensation topology integration for high-tolerant wireless power transfer[J]. Energies, 2023, 16(2): 638. [24] HASAN N, WANG H J, SAHA T, et al. A novel position sensorless power transfer control of lumped coil-based in-motion wireless power transfer systems[C]//IEEE. 2015 IEEE Energy Conversion Congress and Exposition (ECCE). New York: IEEE, 2015: 586-593. [25] LU F, ZHANG H, HOFMANN H, et al. An inductive and capacitive combined wireless power transfer system with lc-compensated topology[J]. IEEE Transactions on Power Electronics, 2016, 31(12): 8471-8482. doi: 10.1109/TPEL.2016.2519903 [26] FENG Yi-meng, MAO Guo-qiang, CHEN Bo, et al. MagMonitor: vehicle speed estimation and vehicle classification through a magnetic sensor[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(2): 1311-1322. [27] 徐诗卉, 张欢, 姚辰, 等. 电动汽车无线充电系统的精确定位方法[J]. 仪表技术与传感器, 2020(11): 59-63.XU Shi-Hui, ZHANG Huan, YAO Chen, et al. Fine positioning method for wireless charging system of electric vehicles[J]. Instrument Technique and Sensor, 2020(11): 59-63. (in Chinese) [28] CHEN Y F, ZHANG H L, SHIN C S, et al. A comparative study of S-S and LCC-S compensation topology of inductive power transfer systems for EV chargers[C]//IEEE. 2019 IEEE 10th International Symposium on Power Electronics for Distributed Generation Systems (PEDG). New York: IEEE, 2019: 99-104. [29] 白叶红. AGV车HWPT系统的非线性因素与优化设计[D]. 西安: 长安大学, 2021.BAI Ye-hong. The nonlinear factors and optimal design of the HWPT system of AGV[D]. Xi'an: Chang'an University, 2021. (in Chinese) [30] 张朱浩伯, 徐德鸿, PHILIP T K, 等. 一种高偏移容限的无线电能传输系统设计[J]. 电源学报, 2021, 19(1): 155-164.ZHANG Zhu-hao-bo, XU De-hong, PHILIP T K, et al. Design of a wireless power transfer system with high misalignment tolerance[J]. Journal of Power Supply, 2021, 19(1): 155-164. (in Chinese) -


 下载:
下载:














 点击查看大图
点击查看大图

计量
- 文章访问数: 257
- HTML全文浏览量: 83
- PDF下载量: 37
- 被引次数: 0
