

Research review of control architecture and driving authority decision-making of driver-automation cooperative driving
Article Text (Baidu Translation)
-
摘要: 从控制架构与驾驶权决策出发,阐述了人机共驾的研究现状以及发展趋势;在控制架构方面,分析了切换控制架构和共享控制架构的特点和应用范围,并提出了混杂控制架构概念;在驾驶权决策方面,讨论了不同驾驶权决策方法对不同来源、不同性质信息的使用方式,概括了执行驾驶权分配时直接和间接共享控制方式所涉及的方法,梳理了策略层决策与执行层决策的研究角度与方法。研究结果表明:针对高阶自动驾驶上路运行安全问题,发展混杂控制架构对安全员干预场景下的系统动态进行描述有利于避免模型失配,从而为控制性能优化和稳定性设计提供了基础;通过融合全息态势感知与数据智能的方式收集和整合多个信息源的数据,能够更加全面地理解人机共驾系统中诸多要素的动态变化并做出最优驾驶权决策;相较于直接共享控制,间接共享控制能避免人机控制流直接对抗,但是其动态驾驶权分配执行层面不仅需要考虑人机之间的冲突反馈,还需要确保合理的交互体验以体现间接共享控制的优势;基于智能体的策略层决策方法并不依赖于数学模型精度,能够自适应环境的动态变化;基于博弈论的执行层决策方法通过建模人机交互过程能够增强驾驶权决策系统的可控性和可解释性;未来的人机共驾系统设计应进一步优化交互体验,关注发展平等共融的人机关系,并提高控制系统的鲁棒性以及驾驶权决策的可解释性和适应性。Abstract: In view of the control architecture and driving authority decision-making, the research status and development trend of driver-automation cooperative driving were expounded. In terms of control architecture, the characteristics and application range of switching control architecture and shared control architecture were analyzed, and the concept of hybrid control architecture was proposed. In terms of driving authority decision-making, the ways of using different sources and natures of information in different driving authority decision-making methods were discussed. The methods involved in the direct and indirect shared control methods when implementing the allocation of driving authority were summarized. The research perspectives and methods of decision-making at the strategy level and the executive level were sorted out. Research results show that for the safety problems of high-level automated driving on the road, the development of hybrid control architecture for describing the system dynamics under human safety intervention scenarios is conducive to avoiding model mismatch, which provides the foundation for control performance optimization and stability design. By integrating holographic situational awareness and data intelligence to collect and integrate data from multiple information sources, the dynamic changes of many factors in the driver-automation cooperative driving system can be more comprehensively understood, and the optimal driving authority decision can be made. Compared with direct shared control, indirect shared control can avoid direct confrontation between driver and automation control flows. However, at the executive level of dynamic driving authority allocation, it is necessary to consider the conflict feedback between driver and automation and ensure a reasonable interactive experience, so as to reflect the advantages of indirect shared control. The decision-making method based on the agent at the strategy level is independent of the accuracy of the mathematical model and can adapt to the dynamic change of the environment. The decision-making method based on game theory at the executive level can enhance the controllability and explainability of the driving authority decision-making system by modeling the driver-automation interaction process. In the future, the driver-automation cooperative driving system should be designed to further optimize the interactive experience. Meanwhile, the development of equal and inclusive driver-automation relationships is necessary. The robustness of the control system and the interpretation and adaptability of driving authority decision-making should be improved as well.
-

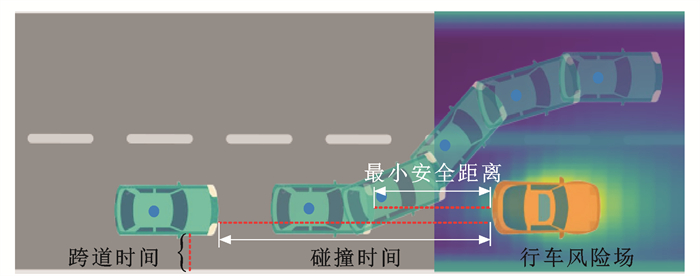
图 5 常用车辆环境风险感知方法
Figure 5. Environmental risk perception method of commonly used vehicle
表 1 驾驶权决策信息源归纳
Table 1. Induction of information sources for driving authority decision-making
 下载: 导出CSV
下载: 导出CSV
-
[1] RAHWAN I, CEBRIAN M, OBRADOVICH N, et al. Machine behaviour[J]. Nature, 2019, 568(7753): 477-486. [2] 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. doi: 10.3969/j.issn.1674-8484.2017.01.001LI Ke-qiang, DAI Yi-fan, LI Sheng-bo, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. Journal of Automotive Safety and Energy, 2017, 8(1): 1-14. doi: 10.3969/j.issn.1674-8484.2017.01.001 [3] 陈虹, 郭露露, 边宁. 对汽车智能化进程及其关键技术的思考[J]. 科技导报, 2017, 35(11): 52-59.CHEN Hong, GUO Lu-lu, BIAN Ning. On automobile intelligentization and key technologies[J]. Science and Technology Review, 2017, 35(11): 52-59. [4] 宗长富, 代昌华, 张东. 智能汽车的人机共驾技术研究现状和发展趋势[J]. 中国公路学报, 2021, 34(6): 214-237. doi: 10.3969/j.issn.1001-7372.2021.06.021ZONG Chang-fu, DAI Chang-hua, ZHANG Dong. Human-machine interaction technology of intelligent vehicles: current development trends and future directions[J]. China Journal of Highway and Transport, 2021, 34(6): 214-237. doi: 10.3969/j.issn.1001-7372.2021.06.021 [5] LU Z J, HAPPEE R, CABRALL C D D, et al. Human factors of transitions in automated driving: a general framework and literature survey[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2016, 43: 183-198. [6] QU Yu, HU Hong-yu, LIU Jia-rui, et al. Driver state monitoring technology for conditionally automated vehicles: review and future prospects[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 3000920. [7] ZHANG Zi-yu, WANG Chun-yan, ZHAO Wan-zhong, et al. Driving authority allocation strategy based on driving authority real-time allocation domain[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 8528-8543. [8] LI Yang, SUN Di-hua, ZHAO Min, et al. MPC-based switched driving model for human vehicle co-piloting considering human factors[J]. Transportation Research Part C: Emerging Technologies, 2020, 115: 102612. doi: 10.1016/j.trc.2020.102612 [9] 杨俊儒, 褚端峰, 陆丽萍, 等. 智能汽车人机共享控制研究综述[J]. 机械工程学报, 2022, 58(18): 31-55.YANG Jun-ru, CHU Duan-feng, LU Li-ping, et al. Review on human-machine shared control of intelligent vehicles[J]. Journal of Mechanical Engineering, 2022, 58(18): 31-55. [10] KHALFAOUI M, HARTANI K, MERAH A, et al. Development of shared steering torque system of electric vehicles in presence of driver behaviour estimation[J]. International Journal of Vehicle Autonomous Systems, 2018, 14(1): 18. doi: 10.1504/IJVAS.2018.093100 [11] LIU Jun, GUO Hong-yan, SONG Lin-huan, et al. Driver-automation shared steering control for highly automated vehicles[J]. Science China Information Sciences, 2020, 63(9): 190201. doi: 10.1007/s11432-019-2987-x [12] SENTOUH C, NGUYEN A T, BENLOUCIF M A, et al. Driver-automation cooperation oriented approach for shared control of lane keeping assist systems[J]. IEEE Transactions on Control Systems Technology, 2019, 27(5): 1962-1978. doi: 10.1109/TCST.2018.2842211 [13] YUE Ming, FANG Chao, ZHANG Hong-zhi, et al. Adaptive authority allocation-based driver-automation shared control for autonomous vehicles[J]. Accident Analysis and Prevention, 2021, 160: 106301. doi: 10.1016/j.aap.2021.106301 [14] 吴超仲, 吴浩然, 吕能超. 基于间接共享控制的智能车协同接管方法[J]. 中国公路学报, 2022, 35(3): 101-114. doi: 10.3969/j.issn.1001-7372.2022.03.010WU Chao-zhong, WU Hao-ran, LYU Neng-chao. Cooperative takeover method for automated vehicles based on indirect shared control[J]. China Journal of Highway and Transport, 2022, 35(3): 101-114. doi: 10.3969/j.issn.1001-7372.2022.03.010 [15] SAITO T, WADA T, SONODA K. Control authority transfer method for automated-to-manual driving via a shared authority mode[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3(2): 198-207. doi: 10.1109/TIV.2018.2804167 [16] 全国汽车标准化技术委员会. 自动驾驶系统接管及人机交互功能标准化需求研究项目报告[R]. 天津: 全国汽车标准化技术委员会, 2020.National Technical Committee of Auto Standardization. Research project report on the standardization requirements of autonomous driving system takeover and human-computer interaction function[R]. Tianjin: National Technical Committee of Auto Standardization, 2020. [17] MERAT N, HAMISH JAMSON A, LAI F C H, et al. Highly automated driving, secondary task performance, and driver state[J]. Human Factors, 2012, 54(5): 762-771. doi: 10.1177/0018720812442087 [18] 刘明周, 蒋倩男, 扈静. 基于面部几何特征及手部运动特征的驾驶员疲劳检测[J]. 机械工程学报, 2019, 55(2): 18-26.LIU Ming-zhou, JIANG Qian-nan, HU Jing. Based on facial geometric features and hand motion characteristics driver fatigue detection[J]. Journal of Mechanical Engineering, 2019, 55(2): 18-26. [19] WANG Rong-ben, GUO Lie, TONG Bing-liang, et al. Monitoring mouth movement for driver fatigue or distraction with one camera[C]//IEEE. Proceedings of the 7th International IEEE Conference on Intelligent Transportation Systems. New York: IEEE, 2004: 314-319. [20] LIN C T, CHEN Y C, WU R C, et al. Assessment of driver's driving performance and alertness using EEG-based fuzzy neural networks[C]//IEEE. 2005 IEEE International Symposium on Circuits and Systems (ISCAS). New York: IEEE, 2005: 152-155. [21] 徐礼胜, 张闻勖, 庞宇轩, 等. 基于短时心电信号的疲劳驾驶检测算法[J]. 东北大学学报: 自然科学版, 2019, 40(7): 937-941.XU Li-sheng, ZHANG Wen-xu, PANG Yu-xuan, et al. Driver drowsiness detection algorithm using short-time ECG signals[J]. Journal of Northeastern University: Natural Science, 2019, 40(7): 937-941. [22] CLEMENT F S C, VASHISTHA A, RANE M E. Driver fatigue detection system[C]//IEEE. 2015 International Conference on Information Processing (ICIP). New York: IEEE, 2015: 229-234. [23] WU Yan-hong, WEI Han-bing, CHEN Xing, et al. Adaptive authority allocation of human-automation shared control for autonomous vehicle[J]. International Journal of Automotive Technology, 2020, 21(3): 541-553. doi: 10.1007/s12239-020-0051-6 [24] WALKER F, WANG J, MARTENS M H, et al. Gaze behaviour and electrodermal activity: objective measures of drivers' trust in automated vehicles[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2019, 64: 401-412. doi: 10.1016/j.trf.2019.05.021 [25] LI Peng-hui, LI Yi-bing, YAO Yao, et al. Sensitivity of electrodermal activity features for driver arousal measurement in cognitive load: the application in automated driving systems[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(9): 14954-14967. [26] TAKEI Y, FURUKAWA Y. Estimate of driver's fatigue through steering motion[C]//IEEE. 2005 IEEE International Conference on Systems, Man and Cybernetics. New York: IEEE, 2005: 1765-1770. [27] ARNEDT J T, WILDE G J S, MUNT P W, et al. How do prolonged wakefulness and alcohol compare in the decrements they produce on a simulated driving task?[J]. Accident Analysis and Prevention, 2001, 33(3): 337-344. doi: 10.1016/S0001-4575(00)00047-6 [28] 朱冰, 李伟男, 赵健, 等. 考虑驾驶人驾驶习性的自适应车道偏离预警策略[J]. 同济大学学报: 自然科学版, 2019, 47(增1): 171-177.ZHU Bing, LI Wei-nan, ZHAO Jian, et al. Adaptive lane departure warning strategy considering driver's driving habits[J]. Journal of Tongji University: Natural Science, 2019, 47(S1): 171-177. [29] LI Ren-jie, LI Ya-nan, LI Sheng-bo, et al. Driver-automation indirect shared control of highly automated vehicles with intention-aware authority transition[C]//IEEE. 2017 IEEE Intelligent Vehicles Symposium (Ⅳ). New York: IEEE, 2017: 26-32. [30] WU Hao-ran, LI Yan, WU Chao-zhong, et al. A longitudinal minimum safety distance model based on driving intention and fuzzy reasoning[C]//IEEE. 2017 4th International Conference on Transportation Information and Safety (ICTIS). New York: IEEE, 2017: 158-162. [31] OIKAWA H, NISHIDA T, SAKAMOTO R, et al. Fast semi-supervised anomaly detection of drivers' behavior using online sequential extreme learning machine[C]//IEEE. 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC). New York: IEEE, 2020: 1-8. [32] SALEH L, CHEVREL P, CLAVEAU F, et al. Shared steering control between a driver and an automation: stability in the presence of driver behavior uncertainty[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(2): 974-983. doi: 10.1109/TITS.2013.2248363 [33] WANG Jian-qiang, WU Jian, LI Yang, et al. The concept and modeling of driving safety field based on driver-vehicle-road interactions[C]//IEEE. 17th International IEEE Conference on Intelligent Transportation Systems (ITSC). New York: IEEE, 2014: 974-981. [34] 丁飞, 黎乾龙, 雷飞, 等. 动态轨迹跟踪下力矩相关性驱动辅助的人机协同转向预测控制策略研究[J]. 机械工程学报, 2022, 58(6): 143-152.DING Fei, LI Qian-long, LEI Fei, et al. Research on human-machine shared steering predictive control strategy assisted with torque correlation under dynamic trajectory tracking[J]. Journal of Mechanical Engineering, 2022, 58(6): 143-152. [35] MATTHEWS G, NEUBAUER C, SAXBY D J, et al. Dangerous intersections? A review of studies of fatigue and distraction in the automated vehicle[J]. Accident Analysis and Prevention, 2019, 126: 85-94. doi: 10.1016/j.aap.2018.04.004 [36] ZENG Xiao-lu, WANG Feng-yu, WANG Bei-bei, et al. In-vehicle sensing for smart cars[J]. IEEE Open Journal of Vehicular Technology, 2022, 3: 221-242. doi: 10.1109/OJVT.2022.3174546 [37] WANG Zheng, ZHENG Ren-cheng, KAIZUKA T, et al. The effect of a haptic guidance steering system on fatigue-related driver behavior[J]. IEEE Transactions on Human-Machine Systems, 2017, 47(5): 741-748. doi: 10.1109/THMS.2017.2693230 [38] GUO Han-ying, ZHANG Yu-hao. A review of motor vehicle driver fatigue research: based on L3 automatic driving system[C]//Springer. Green Connected Automated Transportation and Safety. Berlin: Springer, 2022: 257-270. [39] 葛慧敏, 郑明强, 吕能超, 等. 驾驶分心综述[J]. 交通运输工程学报, 2021, 21(2): 38-55. doi: 10.19818/j.cnki.1671-1637.2021.02.004GE Hui-min, ZHENG Ming-qiang, LYU Neng-chao, et al. Review on driving distraction[J]. Journal of Traffic and Transportation Engineering, 2021, 21(2): 38-55. doi: 10.19818/j.cnki.1671-1637.2021.02.004 [40] CARSTEN O, LAI F C H, BARNARD Y, et al. Control task substitution in semiautomated driving: does it matter what aspects are automated?[J]. Human Factors, 2012, 54(5): 747-761. doi: 10.1177/0018720812460246 [41] POHL J, BIRK W, WESTERVALL L. A driver-distraction-based lane-keeping assistance system[J]. Proceedings of the Institution of Mechanical Engineers, Part Ⅰ: Journal of Systems and Control Engineering, 2007, 221(4): 541-552. [42] CHEN Liang-kuang, YANG Chuan-kui. Control authority determination of a vehicle lane keeping assist controller[C]//IEEE. 2009 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2009: 1383-1388. [43] 耿磊, 袁菲, 肖志涛, 等. 基于面部行为分析的驾驶员疲劳检测方法[J]. 计算机工程, 2018, 44(1): 274-279. doi: 10.3969/j.issn.1000-3428.2018.01.046GENG Lei, YUAN Fei, XIAO Zhi-tao, et al. Driver fatigue detection method based on facial behavior analysis[J]. Computer Engineering, 2018, 44(1): 274-279. doi: 10.3969/j.issn.1000-3428.2018.01.046 [44] LUO Rui-kun, WENG Yi-fan, WANG Yi-fan, et al. A workload adaptive haptic shared control scheme for semi-autonomous driving[J]. Accident Analysis and Prevention, 2021, 152: 105968. doi: 10.1016/j.aap.2020.105968 [45] XIANG Yun-jie, YANG Hai-yan, HU Rong, et al. Comparison of the deep learning methods applied on human eye detection[C]//IEEE. 2021 IEEE International Conference on Power Electronics, Computer Applications (ICPECA). New York: IEEE, 2021: 314-318. [46] JIAO Shuang-jian, LIU Lin-yao, LIU Qian. A hybrid deep learning model for recognizing actions of distracted drivers[J]. Sensors, 2021, 21(21): 7424. doi: 10.3390/s21217424 [47] WANG Zheng, ZHENG Ren-cheng, KAIZUKA T, et al. Relationship between gaze behavior and steering performance for driver-automation shared control: a driving simulator study[J]. IEEE Transactions on Intelligent Vehicles, 2019, 4(1): 154-166. [48] 闵建亮, 蔡铭. 基于前额脑电多尺度小波对数能量熵的驾驶疲劳检测分析[J]. 中国公路学报, 2020, 33(6): 182-189. doi: 10.3969/j.issn.1001-7372.2020.06.017MIN Jian-liang, CAI Ming. Driver fatigue detection based on multi-scale wavelet log energy entropy of frontal EEG[J]. China Journal of Highway and Transport, 2020, 33(6): 182-189. doi: 10.3969/j.issn.1001-7372.2020.06.017 [49] RATH J J, SENOUTH C, POPIEUL J C. Personalised lane keeping assist strategy: adaptation to driving style[J]. IET Control Theory and Applications, 2019, 13(1): 106-115. doi: 10.1049/iet-cta.2018.5941 [50] 张希波, 成波, 冯睿嘉. 基于方向盘操作的驾驶人疲劳状态实时检测方法[J]. 清华大学学报(自然科学版) 2010, 50(7): 1072-1076, 1081.ZHANG Xi-bo, CHENG Bo, FENG Rui-jia. Real-time detection of driver drowsiness based on steering performance[J]. Journal of Tsinghua University (Science and Technology), 2010, 50(7): 1072-1076, 1081. [51] HUANG Chao, LYU Chen, HANG Peng, et al. Human-machine adaptive shared control for safe driving under automation degradation[J]. IEEE Intelligent Transportation Systems Magazine, 2022, 14(2): 53-66. doi: 10.1109/MITS.2021.3065382 [52] 成波, 冯睿嘉, 张伟, 等. 基于多源信息融合的驾驶人疲劳状态监测及预警方法研究[J]. 公路交通科技, 2009, 26(增1): 13-18.CHENG Bo, FENG Rui-jia, ZHANG Wei, et al. Driver drowsiness detection and warning system based on multi-source information fusion[J]. Journal of Highway and Transportation Research and Development, 2009, 26(S1): 13-18. [53] LEE B G, CHUNG W Y. Driver alertness monitoring using fusion of facial features and bio-signals[J]. IEEE Sensors Journal, 2012, 12(7): 2416-2422. doi: 10.1109/JSEN.2012.2190505 [54] 郭烈, 马跃, 岳明, 等. 驾驶特性的识别评估及其在智能汽车上的应用综述[J]. 交通运输工程学报, 2021, 21(2): 7-20. doi: 10.19818/j.cnki.1671-1637.2021.02.002GUO Lie, MA Yue, YUE Ming, et al. Overview of recognition and evaluation of driving characteristics and their applications in intelligent vehicles[J]. Journal of Traffic and Transportation Engineering, 2021, 21(2): 7-20. doi: 10.19818/j.cnki.1671-1637.2021.02.002 [55] 郭烈, 葛平淑, 夏文旭, 等. 基于人机共驾的车道保持辅助控制系统研究[J]. 中国公路学报, 2019, 32(12): 46-57.GUO Lie, GE Ping-shu, XIA Wen-xu, et al. Lane-keeping control systems based on human-machine cooperative driving[J]. China Journal of Highway and Transport, 2019, 32(12): 46-57. [56] KUGE N, YAMAMURA T, SHIMOYAMA O, et al. A driver behavior recognition method based on a driver model framework[J]. SAE Transactions, 2000, 109(6): 469-476. [57] 于扬, 梁军, 陈龙, 等. 基于高斯混合隐马尔科夫模型与人工神经网络的紧急换道行为预测方法[J]. 中国机械工程, 2020, 31(23): 2874-2882, 2890. doi: 10.3969/j.issn.1004-132X.2020.23.012YU Yang, LIANG Jun, CHEN Long, et al. Vehicle emergency lane-changing behavior prediction method based on GMM-HMM and ANN[J]. China Mechanical Engineering, 2020, 31(23): 2874-2882, 2890. doi: 10.3969/j.issn.1004-132X.2020.23.012 [58] LI Ke-qiang, WANG Xiao, XU You-chun, et al. Lane changing intention recognition based on speech recognition models[J]. Transportation Research Part C: Emerging Technologies, 2016, 69: 497-514. doi: 10.1016/j.trc.2015.11.007 [59] LI Ming-jin, SONG Xiao-lin, CAO Hao-tian, et al. Shared steering control combined with driving intention for vehicle obstacle avoidance[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2019, 233(11): 2791-2808. doi: 10.1177/0954407018806147 [60] LI Ming-jun, CAO Hao-tian, SONG Xiao-lin, et al. Shared control driver assistance system based on driving intention and situation assessment[J]. IEEE Transactions on Industrial Informatics, 2018, 14(11): 4982-4994. doi: 10.1109/TII.2018.2865105 [61] 谈东奎, 陈无畏, 王家恩, 等. 基于人机共享和分层控制的车道偏离辅助系统[J]. 机械工程学报, 2015, 51(22): 98-110.TAN Dong-kui, CHEN Wu-wei, WANG Jia-en, et al. Human-machine sharing and hierarchical control based lane departure assistance system[J]. Journal of Mechanical Engineering, 2015, 51(22): 98-110. [62] 李熙莹, 梁靖茹, 郝腾龙. 考虑连锁冲突的城市公交车行车风险量化分析方法[J]. 交通信息与安全, 2022, 40(3): 19-29. doi: 10.3963/j.jssn.1674-4861.2022.03.003LI Xi-ying, LIANG Jing-ru, HAO Teng-long. A method for quantitatively analyzing risks associated with the operation of urban buses considering chained conflicts[J]. Journal of Transport Information and Safety, 2022, 40(3): 19-29. doi: 10.3963/j.jssn.1674-4861.2022.03.003 [63] LI Ming-jin, SONG Xiao-lin, CAO Hao-tian, et al. Shared control with a novel dynamic authority allocation strategy based on game theory and driving safety field[J]. Mechanical Systems and Signal Processing, 2019, 124: 199-216. [64] MEN Hao, POCHIRAJU K. Coupled lateral and lane separation control for 2-D vehicle groups[C]//ASME. ASME 2008 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. New York: ASME, 2008: 809-817. [65] 修彩靖, 陈慧. 基于改进人工势场法的无人驾驶车辆局部路径规划的研究[J]. 汽车工程, 2013, 35(9): 808-811. doi: 10.3969/j.issn.1000-680X.2013.09.011XIU Cai-jing, CHEN Hui. A research on local path planning for autonomous vehicles based on improved APF method[J]. Automotive Engineering, 2013, 35(9): 808-811. doi: 10.3969/j.issn.1000-680X.2013.09.011 [66] 何仁, 赵晓聪, 王建强. 人-车-路交互下的驾驶人风险响应度建模[J]. 中国公路学报, 2020, 33(9): 236-250. doi: 10.3969/j.issn.1001-7372.2020.09.023HE Ren, ZHAO Xiao-cong, WANG Jian-qiang. Modeling of driving risk response under human-vehicle-road interaction[J]. China Journal of Highway and Transport, 2020, 33(9): 236-250. doi: 10.3969/j.issn.1001-7372.2020.09.023 [67] 熊晓夏, 陈龙, 梁军, 等. 基于驾驶员避撞行为的行车风险判别方法的仿真研究[J]. 汽车工程, 2019, 41(2): 153-160, 169.XIONG Xiao-xia, CHEN Long, LIANG Jun, et al. Simulation study on driving risk discrimination based on driver's collision avoidance behavior[J]. Automotive Engineering, 2019, 41(2): 153-160, 169. [68] GRIFFITHS P G, BRENT GILLESPIE R. Sharing control between humans and automation using haptic interface: primary and secondary task performance benefits[J]. Human Factors, 2005, 47(3): 574-590. [69] MULDER M, ABBINK D A, BOER E R. Sharing control with haptics: seamless driver support from manual to automatic control[J]. Human Factors, 2012, 54(5): 786-798. [70] GHASEMI A H, JAYAKUMAR P, GILLESPIE R B. Shared control architectures for vehicle steering[J]. Cognition, Technology and Work, 2019, 21(4): 699-709. [71] MULDER M, ABBINK D A, BOER E R. The effect of haptic guidance on curve negotiation behavior of young, experienced drivers[C]//IEEE. 2008 IEEE International Conference on Systems, Man and Cybernetics. New York: IEEE, 2008: 804-809. [72] BENLOUCIF M A, NGUYEN A T, SENTOUH C, et al. A new scheme for haptic shared lateral control in highway driving using trajectory planning[J]. IFAC-PapersOnLine, 2017, 50(1): 13834-13840. [73] NISHIMURA R, WADA T, SUGIYAMA S. Haptic shared control in steering operation based on cooperative status between a driver and a driver assistance system[J]. Journal of Human-Robot Interaction, 2015, 4(3): 19-37. [74] HIRAOKA T. How do we share the "control" when using the haptic shared control for an advanced driver-assistance system? Direct HSC and indirect HSC[J]. IFAC-PapersOnLine, 2019, 52(19): 61-66. [75] WANG Wen-shuo, NA Xiao-xiang, CAO Dong-pu, et al. Decision-making in driver-automation shared control: a review and perspectives[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(5): 1289-1307. [76] LI Wen-yu, LI Qing-kun, LI Sheng-bo, et al. Indirect shared control through non-zero sum differential game for cooperative automated driving[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(9): 15980-15992. [77] ZHAO Xiao-bin, YIN Zhi-shuai, HE Zhi-wei, et al. Indirect shared control strategy for human-machine cooperative driving on hazardous curvy roads[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8(3): 2257-2270. [78] LI Ren-jie, LI Ya-nan, LI Sheng-bo, et al. Indirect shared control for cooperative driving between driver and automation in steer-by-wire vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(12): 7826-7836. [79] HEESEN M, DZIENNUS M, HESSE T, et al. Interaction design of automatic steering for collision avoidance: challenges and potentials of driver decoupling[J]. IET Intelligent Transport Systems, 2015, 9(1): 95-104. [80] NA Xiao-xiang, COLE D J. Application of open-loop Stackelberg equilibrium to modeling a driver's interaction with vehicle active steering control in obstacle avoidance[J]. IEEE Transactions on Human-Machine Systems, 2017, 47(5): 673-685. [81] HUANG Chao, NAGHDY F, DU Hai-ping, et al. Shared control of highly automated vehicles using steer-by-wire systems[J]. IEEE/CAA Journal of Automatica Sinica, 2019, 6(2): 410-423. [82] RUSSELL H E B, HARBOTT L K, NISKY I, et al. Motor learning affects car-to-driver handover in automated vehicles[J]. Science Robotics, 2016, 1(1): eaah5682. [83] ANDERSON S J, PETERS S C, PILUTTI T E, et al. Design and development of an optimal-control-based framework for trajectory planning, threat assessment, and semi-autonomous control of passenger vehicles in hazard avoidance scenarios[C]//Springer. Robotics Research: The 14th International Symposium ISRR. Berlin: Springer, 2011: 39-54. [84] SENTOUH C, DEBERNARD S, POPIEUL J C, et al. Toward a shared lateral control between driver and steering assist controller[J]. IFAC Proceedings Volumes, 2010, 43(13): 404-409. [85] SHI Zhu-qing, CHEN Hong, QU Ting, et al. Human-machine cooperative steering control considering mitigating human-machine conflict based on driver trust[J]. IEEE Transactions on Human-Machine Systems, 2022, 52(5): 1036-1048. [86] LIANG Yang, YIN Zhi-shuai, NIE Lin-zhen. Shared steering control for lane keeping and obstacle avoidance based on multi-objective MPC[J]. Sensors, 2021, 21(14): 4671. [87] LI Xue-yun, WANG Yi-ping, SU Chu-qi, et al. Adaptive authority allocation approach for shared steering control system[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 19428-19439. [88] HUANG Meng-zhe, GAO Wei-nan, WANG Ye-bin, et al. Data-driven shared steering control of semi-autonomous vehicles[J]. IEEE Transactions on Human-Machine Systems, 2019, 49(4): 350-361. [89] IZADI V, SARAPHIS D, GHASEMI A H. Convention-based intent integration in a haptic shared control paradigm[J]. IFAC-PapersOnLine, 2022, 55(37): 506-511. [90] 郭柏苍, 王胤霖, 谢宪毅, 等. 基于人-车风险状态的人机共驾控制权决策方法[J]. 中国公路学报, 2022, 35(3): 153-165.GUO Bo-cang, WANG Yin-lin, XIE Xian-yi, et al. Decision making method for control right transition of human-machine shared driving based on driver-vehicle risk state[J]. China Journal of Highway and Transport, 2022, 35(3): 153-165. [91] 吴超仲, 冷姚, 陈志军, 等. 基于强化学习的智能车人机共融转向驾驶决策方法[J]. 交通运输工程学报, 2022, 22(3): 55-67. doi: 10.19818/j.cnki.1671-1637.2022.03.004WU Chao-zhong, LENG Yao, CHEN Zhi-jun, et al. Human-machine integration method for steering decision-making of intelligent vehicle based on reinforcement learning[J]. Journal of Traffic and Transportation Engineering, 2022, 22(3): 55-67. doi: 10.19818/j.cnki.1671-1637.2022.03.004 [92] 韩嘉懿, 赵健, 朱冰. 面向智能汽车人机协同转向控制的强化学习变阻抗人机交互方法[J]. 机械工程学报, 2022, 58(18): 141-149.HAN Jia-yi, ZHAO Jian, ZHU Bing. Variable Impedance-based human-machine interaction method using reinforcement learning for shared steering control of intelligent vehicle[J]. Journal of Mechanical Engineering, 2022, 58(18): 141-149. [93] HAMDAN A, TALJ R, CHERFAOUI V. A fuzzy logic shared steering control approach for semi-autonomous vehicle[C]//IEEE. 2021 20th International Conference on Advanced Robotics (ICAR). New York: IEEE, 2021: 83-90. [94] LI Ming-jun, CAO Hao-tian, LI Guo-fa, et al. A two-layer potential-field-driven model predictive shared control towards driver-automation cooperation[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(5): 4415-4431. [95] NGUYEN A T, SENTOUH C, POPIEUL J C. Sensor reduction for driver-automation shared steering control via an adaptive authority allocation strategy[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(1): 5-16. [96] BRAUN D A, ORTEGA P A, WOLPERT D M. Nash equilibria in multi-agent motor interactions[J]. PLoS Computational Biology, 2009, 5(8): e1000468. [97] NA Xiao-xiang, COLE D J. Game-theoretic modeling of the steering interaction between a human driver and a vehicle collision avoidance controller[J]. IEEE Transactions on Human-Machine Systems, 2015, 45(1): 25-38. [98] TAMADDONI S H, TAHERI S, AHMADIAN M. Optimal preview game theory approach to vehicle stability controller design[J]. Vehicle System Dynamics, 2011, 49(12): 1967-1979. [99] FLAD M, FRÖHLICH L, HOHMANN S. Cooperative shared control driver assistance systems based on motion primitives and differential games[J]. IEEE Transactions on Human-Machine Systems, 2017, 47(5): 711-722. [100] ZHANG Bo-han, LU Shao-bo, XIE Fei-fei, et al. Stochastic cooperative game-based assistant fault-tolerant control considering driver behavior uncertainty[J]. IEEE Transactions on Transportation Electrification, 2022, 8(2): 2595-2607. [101] JI Xue-wu, LIU Yu-long, HE Xiang-kun, et al. Interactive control paradigm-based robust lateral stability controller design for autonomous automobile path tracking with uncertain disturbance: a dynamic game approach[J]. IEEE Transactions on Vehicular Technology, 2018, 67(8): 6906-6920. [102] JI Xue-wu, YANG Kai-ming, NA Xiao-xiang, et al. Shared steering torque control for lane change assistance: a stochastic game-theoretic approach[J]. IEEE Transactions on Industrial Electronics, 2019, 66(4): 3093-3105. [103] 卢少波, 谢菲菲, 张博涵, 等. 基于非对称势场的人车协同博弈避撞[J]. 汽车工程, 2022, 44(10): 1484-1493.LU Shao-bo, XIE Fei-fei, ZHANG Bo-han, et al. Human-vehicle cooperative game collision avoidance based on asymmetric potential fields[J]. Automotive Engineering, 2022, 44(10): 1484-1493. [104] FLAD M, OTTEN J, SCHWAB S, et al. Steering driver assistance system: a systematic cooperative shared control design approach[C]//IEEE. 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC). New York: IEEE, 2014: 3585-3592. [105] 刘瑞, 朱西产, 刘霖, 等. 基于非合作模型预测控制的人机共驾策略[J]. 同济大学学报: 自然科学版, 2019, 47(7): 1037-1045.LIU Rui, ZHU Xi-chan, LIU Lin, et al. Cooperative driving strategy based on non-cooperative model predictive control[J]. Journal of Tongji University: Natural Science, 2019, 47(7): 1037-1045. [106] HAN Jia-yi, ZHAO Jian, ZHU Bing, et al. Adaptive steering torque coupling framework considering conflict resolution for human-machine shared driving[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(8): 10983-10995. [107] ZHANG Zi-jun, ZHANG Han, ZHAO Wan-zhong. A human-vehicle game stability control strategy considering drivers' steering characteristics[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(11): 7306-7316. -

 点击查看大图
点击查看大图
图(9) / 表(2)
计量
- 文章访问数: 70
- HTML全文浏览量: 69
- PDF下载量: 10
- 被引次数: 0
