

End-to-end two-layer planning and optimization method for UAV swarm spider web-inspired coverage search
-
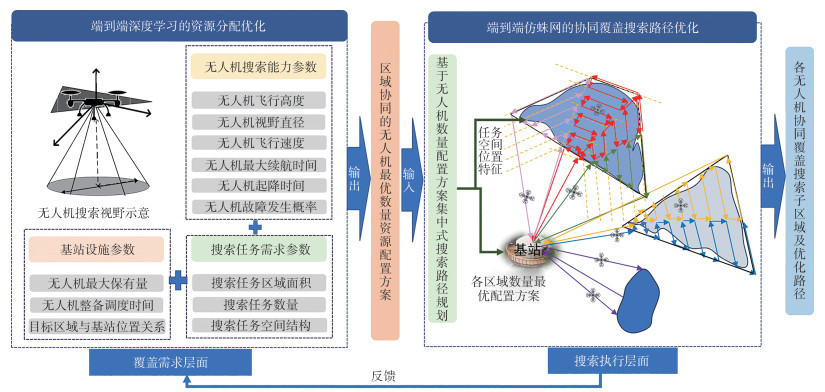
摘要: 为解决无人机群协同覆盖搜索中资源配置与搜索执行的均衡优化难题,减少资源消耗的同时提升区域覆盖均衡性、灵活性及响应速度,提出了一种端到端的无人机群仿蛛网覆盖搜索双层规划优化方法。第1层实现多目标区域无人机资源配置优化,构建了多目标均衡的无人机资源配置优化模型,建立基于深度学习的端到端网络,将搜索区域特征与无人机参数编码为输入矩阵,直接输出多区域无人机群最优协同数量方案,确保在可靠性约束下满足覆盖任务需求;第2层实现仿蛛网覆盖路径优化,基于第1层数量配置结果的最大资源配额,借鉴蛛网放射丝与捕丝结构,将任意凸四边形区域划分为自适应子区域,通过放射路径与平行路径结合实现覆盖优化,支持无人机群并行搜索。研究结果表明:提出的深度学习资源配置网络的目标优化能力与遗传算法相当,强于同结构线性损失组合的深度学习网络以及混合损失单步强化学习,策略均衡性较遗传算法提高84.62%,且方案求解时间较遗传算法大幅缩短;仿蛛网覆盖路径规划优化方法在基站与子区域关联程度、搜索路径的灵活性上均优于对比方法,子区域路径均衡性提高75.45%以上,且无人机群规模越大,优化效果越显著。建立的无人机群协同覆盖搜索框架兼顾资源与路径优化,可在城市巡检、应急救援等场景中提升资源利用率与任务可靠性。Abstract: To address the challenges of balanced optimization between resource allocation and search execution in unmanned aerial vehicle (UAV) swarm collaborative coverage search, and to improve the balance, flexibility, and response speed of regional coverage while reducing resource consumption, an end-to-end two-layer planning and optimization method for UAV swarm spider web-inspired coverage search was proposed. The first layer focused on UAV resource allocation optimization for multi-target regions. A multi-target balanced UAV resource allocation optimization model was constructed, and a deep learning-based end-to-end network was built. The search region features and UAV parameter encoding served as the input matrix, and the optimal collaborative quantity scheme of UAV swarms for multiple regions was directly output, to ensure the coverage task requirements under reliability constraints. The second layer achieved spider web-inspired coverage path optimization. Based on the maximum resource quota from the first layer's quantity allocation result, using the structure of radial threads and capture threads in spider webs, an arbitrary convex quadrilateral region was divided into adaptive sub-regions. Through the combination of radial and parallel paths, coverage optimization was realized and parallel search of UAV swarms was supported. The results demonstrate that the objective optimization performance of the proposed deep learning-based resource allocation network is comparable to the genetic algorithm (GA), and outperforms the deep learning network with linear loss combination of the same structure and the hybrid-loss single-step reinforcement learning method. Its strategic equilibrium is improved by 84.62% compared with GA, and the solution time is greatly reduced. The planning and optimization method for UAV swarm spider web-inspired coverage search is superior to its counterpart methods in terms of the association degree between base stations and sub-regions and the flexibility of search paths. The path equilibrium of sub-regions is increased by more than 75.45%, and the larger the UAV swarm scale, the more significant the optimization effect. The UAV swarm collaborative coverage search framework considers both resource and path optimization. It can improve resource utilization rate and task reliability in urban inspection, emergency rescue, and other scenarios.
-
Key words:
- low-altitude traffic /
- UAV swarm /
- coverage search /
- path optimization /
- resource allocation /
- deep learning /
- bionic structure /
- end-to-end
-

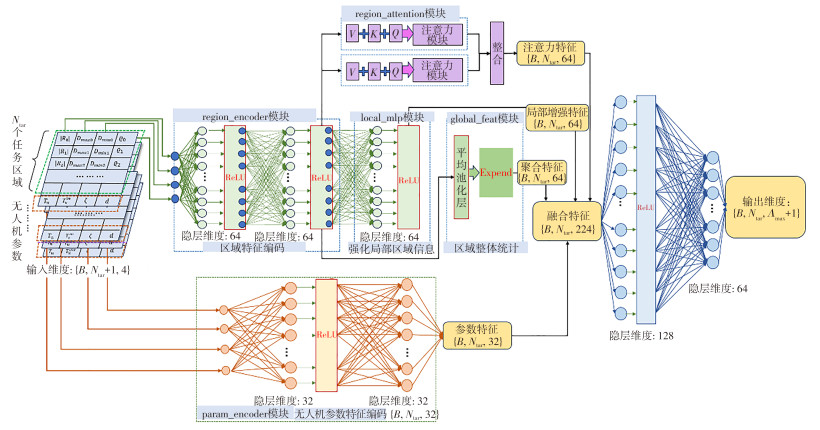
图 1 无人机群覆盖搜索双层优化方法框架
Figure 1. Framework of two-layer optimization method for UAV swarm coverage search

图 2 无人机数量资源配置特征处理网络结构
Figure 2. Network structure for feature processing of UAV quantity resource allocation

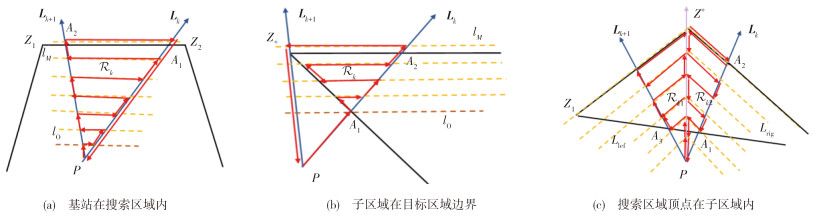
图 4 典型子区域几何结构与覆盖路径规划模式
Figure 4. Typical sub-region geometric structure and coverage path planning modes

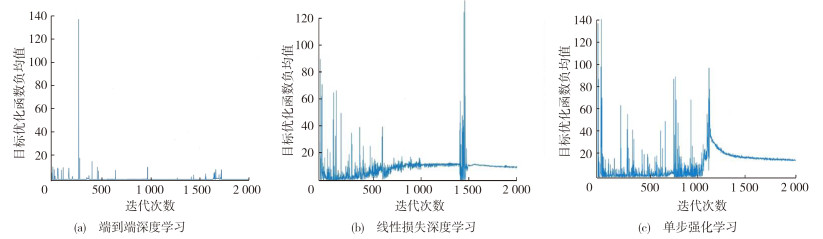
图 5 目标函数网络优化迭代曲线对比
Figure 5. Comparison of objective function iteration curves for network optimization

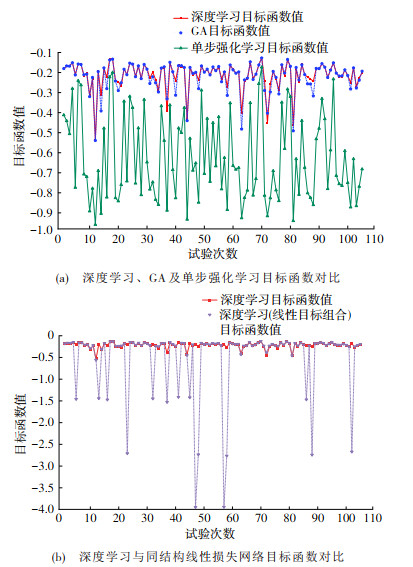
图 6 无人机配置方案目标函数值统计对比
Figure 6. Statistical comparison of objective function values for UAV configuration schemes

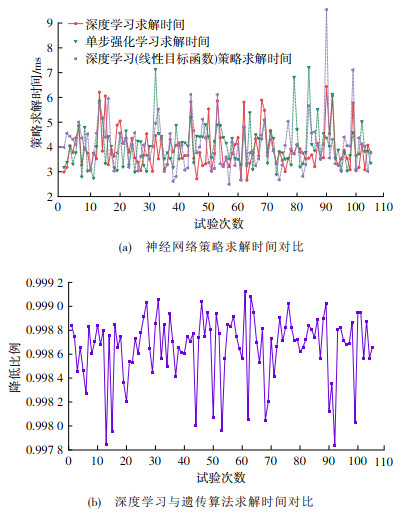
图 7 无人机配置方案求解时间对比
Figure 7. Comparison of solution times for UAV configuration schemes

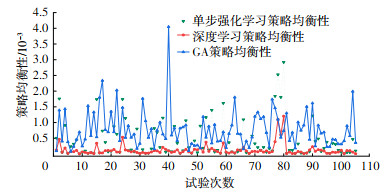
图 8 无人机配置方案均衡性方差对比
Figure 8. Statistical comparison of balance variance for UAV configuration schemes

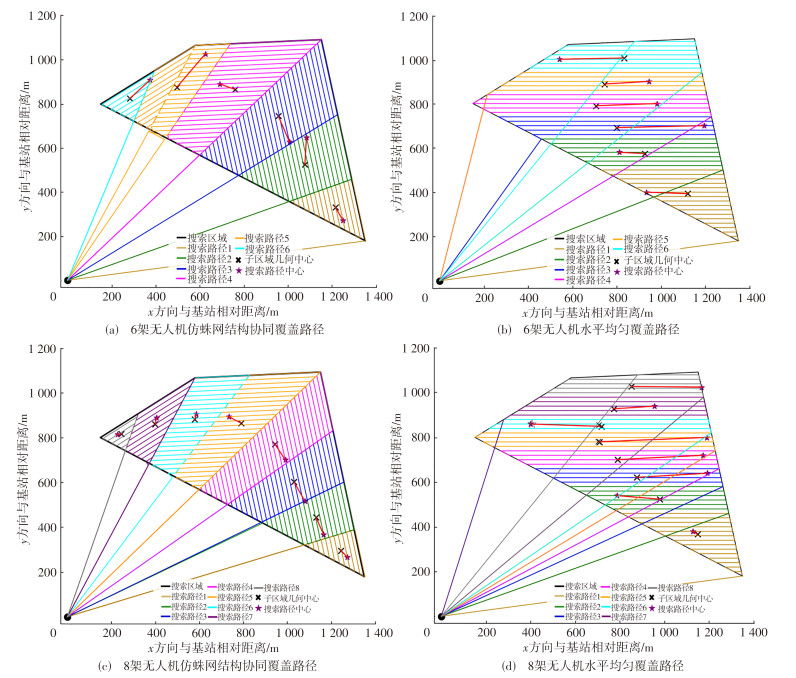
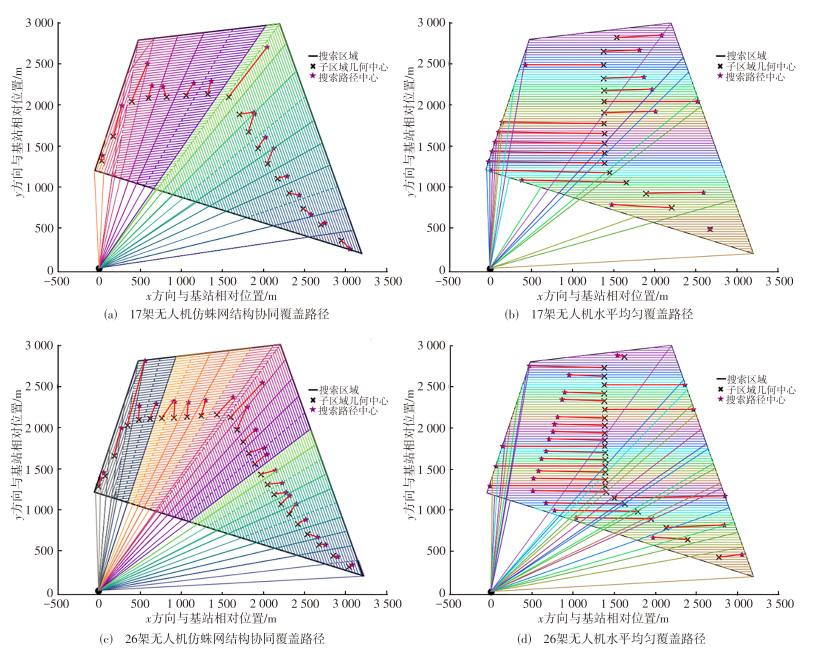
图 9 区域Ⅰ无人机协同覆盖搜索路径规划结果对比
Figure 9. Comparison of UAV cooperative coverage search path planning results in areaⅠ

图 10 区域Ⅱ无人机协同覆盖搜索路径规划结果对比
Figure 10. Comparison of UAV cooperative coverage search path planning results in areaⅡ
表 1 无人机协同覆盖搜索资源配置指标对比
Table 1. Comparison of UAV cooperative coverage search resource allocation indicators
无人机资源配置求解方法 目标函数平均值 求解时间/ms 策略均衡方差 资源配置深度学习网络 -0.215 0 3.9 0.000 12 遗传算法 -0.221 0 2 927.7 0.000 78 混合损失单步强化学习网络 -0.626 6 4.1 0.000 41 线性损失组合深度学习网络 -0.495 0 4.0 0.000 04  下载: 导出CSV
下载: 导出CSV
表 2 无人机协同覆盖搜索路径规划指标
Table 2. Indicators for UAV cooperative coverage search path planning
区域 无人机数量/架 协同覆盖搜索路径规划方法 $ {\bar{D}}_{P} $/m $ {\bar{D}}_{\mathcal{R}} $/m $ {V}_{{D}_{\mathcal{R}}} $ 区域Ⅰ 4 仿蛛网结构规划方法 1 120.57 114.55 2 568.19 水平线等路程切分方法 1 139.01 166.16 21 509.31 6 仿蛛网结构规划方法 1 117.10 119.83 1 855.76 水平线等路程切分方法 1 143.21 244.51 7 960.78 8 仿蛛网结构规划方法 1 116.48 55.57 843.90 水平线等路程切分方法 1 144.28 277.41 17 215.31 12 仿蛛网结构规划方法 1 116.03 53.46 394.97 水平线等路程切分方法 1 143.45 311.25 15 586.94 区域Ⅱ 17 仿蛛网结构规划方法 2 359.67 217.77 30 133.14 水平线等路程切分方法 2 381.08 913.60 174 361.70 26 仿蛛网结构规划方法 2 358.82 211.52 25 996.86 水平线等路程切分方法 2 379.68 796.34 105 881.48
下载: 导出CSV
-
[1] 陈聪, 张国惠, 马晓磊, 等. 利用大数据挖掘和知识发现技术辅助智慧城市发展[J]. 大数据, 2016, 2(3): 39-48.CHEN Cong, ZHANG Guo-hui, MA Xiao-lei, et al. Big data analysis and knowledge discovery for smart city development enhancement [J]. Big Data Research, 2016, 2(3): 39-48. [2] 徐志刚, 申丹丹, 高赢, 等. 基于文献计量的综合交通研究综述[J]. 交通运输工程学报, 2025, 25(2): 37-60. doi: 10.19818/j.cnki.1671-1637.2025.02.003 XU Zhi-gang, SHEN Dan-dan, GAO Ying, et al. Review of multimodal transport research based on bibliometrics[J]. Journal of Traffic and Transportation Engineering, 2025, 25(2): 37-60. doi: 10.19818/j.cnki.1671-1637.2025.02.003 [3] 李晨玮, 周建山, 田大新, 等. 立体交通系统通感算一体化关键技术[J]. 移动通信, 2024, 48(3): 14-20.LI Chen-wei, ZHOU Jian-shan, TIAN Da-xin, et al. Key technology for integrated communication sensing and computing in three-dimensional transportation system[J]. Mobile Communications, 2024, 48(3): 14-20. [4] 张洪海, 夷珈, 李姗, 等. 低空空域容量评估研究综述[J]. 交通运输工程学报, 2023, 23(6): 78-93. doi: 10.19818/j.cnki.1671-1637.2023.06.003ZHANG Hong-hai, YI Jia, LI Shan, et al. Review on research of low-altitude airspace capacity evaluation [J]. Journal of Traffic and Transportation Engineering, 2023, 23(6): 78-93. doi: 10.19818/j.cnki.1671-1637.2023.06.003 [5] 刘文学, 侯聪, 杨亚联, 等. 面向城市空中交通的电动飞行汽车关键性能指标分析[J]. 机械工程学报, 2024, 60(22): 257-275.LIU Wen-xue, HOU Cong, YANG Ya-lian, et al. Analysis of key performance metrics of electric flying cars for urban air mobility [J]. Journal of Mechanical Engineering, 2024, 60(22): 257-275. [6] 杨成, 高建勋. 基于故障树分析法的无人机可靠性分析[J]. 环境技术, 2022, 40(6): 122-126.YANG Cheng, GAO Jian-xun. Reliability analysis of UAV based on fault tree analysis[J]. Environmental Technology, 2022, 40(6): 122-126. [7] DAI X H, DUO B, YUAN X J, et al. Energy-efficient UAV communications: A generalized propulsion energy consumption model [J]. IEEE Wireless Communications Letters, 2022, 11(10): 2150-2154. doi: 10.1109/LWC.2022.3195787 [8] BLAKESLEY A, ANVARI B, KROLL J, et al. Minimum energy route optimisation of a quad-copter UAV with landing incentivisation[C]//IEEE. 2022 IEEE International Conference on Intelligent Transportation Systems. New York: IEEE, 2022: 2300-2306. [9] 欧阳权, 徐罗旻, 杨继阳, 等. 基于能耗优化的四旋翼无人机航迹规划: 分段式高斯伪谱法[J]. 电光与控制, 2025, 32(1): 1-7.OUYANG Quan, XU Luo-min, YANG Ji-yang, et al. Energy-efficient trajectory planning for quadrotor UAVs: A segmented Gaussian pseudospectral method [J]. Electronics Optics & Control, 2025, 32(1): 1-7. [10] IM H S, KIM K Y, LEE S H. Trajectory optimization for cellular-enabled UAV with connectivity and battery constraints[J]. IEEE Transactions on Vehicular Technology, 2025, 74(11): 17812-17828. doi: 10.1109/TVT.2025.3579005 [11] FENG Q, LIU M, DUI H Y, et al. Importance measure-based phased mission reliability and UAV number optimization for swarm[J]. Reliability Engineering & System Safety, 2022, 223: 108478. [12] ALZENAD M, El-KEYI A, LAGUM F, et al. 3-D placement of an unmanned aerial vehicle base station (UAV-BS) for energy-efficient maximal coverage[J]. IEEE Wireless Communications Letters, 2017, 6(4): 434-437. doi: 10.1109/LWC.2017.2700840 [13] HUANG H L, HUANG C, MA D Z. A method for deploying the minimal number of UAV base stations in cellular networks[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(2): 559-567. doi: 10.1109/JAS.2019.1911813 [14] SABZEHALI J, SHAH V K, FAN Q, et al. Optimizing number, placement, and backhaul connectivity of multi-UAV networks[J]. IEEE Internet of Things Journal, 2022, 9(21): 21548-21560. doi: 10.1109/JIOT.2022.3184323 [15] 沈东, 魏瑞轩, 祁晓明, 等. 基于MTPM和DPM的多无人机协同广域目标搜索滚动时域决策[J]. 自动化学报, 2014, 40(7): 1391-1403.SHEN Dong, WEI Rui-xuan, QI Xiao-ming, et al. Receding horizon decision method based on MTPM and DPM for multi-UAVs cooperative large area target search[J]. Acta Automatica Sinica, 2014, 40(7): 1391-1403. [16] 文超, 董文瀚, 解武杰, 等. 基于回访机制的无人机集群分布式协同区域搜索方法[J]. 航空学报, 2023, 44(11): 253-270.WEN Chao, DONG Wen-han, XIE Wu-jie, et al. Distributed cooperative area search method for UAV swarms based on revisit mechanism[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(11): 253-270. [17] 吴韬, 陈思恒, 罗泽霖, 等. 基于概率图的多无人机覆盖搜索路径规划方法[J]. 信息对抗技术, 2025, 4(4): 30-42.WU Tao, CHEN Si-heng, LUO Ze-lin, et al. Path planning method for multi-UAV coverage search based on probability graph[J]. Information Countermeasure Technology, 2025, 4(4): 30-42. [18] ARAÚJO J F, SUJIT P B, SOUSA J B. Multiple UAV area decomposition and coverage[C]//IEEE. 2013 IEEE Symposium on Computational Intelligence for Security and Defense Applications. New York: IEEE, 2013: 30-37. [19] CHEN Y Y, ZHANG H D, XU M. The coverage problem in UAV network: A survey[C]//IEEE. Fifth International Conference on Computing Communications and Networking Technologies. New York: IEEE, 2014: 1-5. [20] LIU Z, GAO X, FU X. A cooperative search and coverage algorithm with controllable revisit and connectivity maintenance for multiple unmanned aerial vehicles[J]. Sensors, 2018, 18(5): 1472. doi: 10.3390/s18051472 [21] 刘全义, 刘继豪, 艾洪舟, 等. 基于混合策略的复杂山区覆盖搜索方法[J]. 清华大学学报(自然科学版), 2026, 66(2): 233-240.LIU Quan-yi, LIU Ji-hao, AI Hong-zhou, et al. Coverage search methods for complex mountainous areas using hybrid strategy [J]. Journal of Tsinghua University (Science and Technology), 2026, 66(2): 233-240. [22] 陈佳雨, 李文, 李泰融, 等. 基于Q-Learning的双无人机覆盖路径规划[J]. 遥测遥控, 2025, 46(4): 96-104.CHEN Jia-yu, LI Wen, LI Tai-rong, et al. Q-learning based dual drone coverage path planning[J]. Journal of Telemetry, Tracking and Command, 2025, 46(4): 96-104. [23] 吴青坡, 周绍磊, 尹高扬, 等. 多无人机协同区域覆盖搜索算法的改进[J]. 电光与控制, 2016, 23(1): 80-84.WU Qing-po, ZHOU Shao-lei, YIN Gao-yang, et al. Improvement of multi-UAV cooperative coverage searching method[J]. Electronics Optics & Control, 2016, 23(1): 80-84. [24] VINH K, GEBREYOHANNES S, KARIMODDINI A. An area-decomposition based approach for cooperative tasking and coordination of uavs in a search and coverage mission[C]//IEEE. 2019 IEEE Aerospace Conference. New York: IEEE, 2019: 1-8. [25] 戴健, 许菲, 陈琪锋. 多无人机协同搜索区域划分与路径规划[J]. 航空学报, 2020, 41(增1): 149-156.DAI Jian, XU Fei, CHEN Qi-feng. Multi-UAV cooperative search area division and path planning [J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S1): 723770. [26] 李道文, 杨鑫松, 孙亚平, 等. 多无人机协同区域覆盖航道规划[J/OL]. 控制工程, 2025, https://doi.org/10.14107/j.cnki.kzgc.20240891 .LI Dao-wen, YANG Xin-song, SUN Ya-ping, et al. Cooperative area coverage route planning for multi-UAVs[J/OL]. Control Engineering, 2025,https://doi.org/10.14107/j.cnki.kzgc.20240891 .[27] 卓春晖, 蒋平, 王昌河, 等. 蛛网结构性能及其适应性[J]. 四川动物, 2006, 25(4): 898-902.ZHUO Chun-hui, JIANG Ping, WANG Chang-he, et al. Structure and mechanical property of spider's web and their adaptations[J]. Sichuan Journal of Zoology, 2006, 25(4): 898-902. [28] 张学阳, 曾培煌. 蜘蛛网结构性能研究[J]. 数学建模及其应用, 2013, 2(1): 34-38.ZHANG Xue-yang, ZENG Pei-huang. Study on structure and properties of spider web[J]. Mathematical Modeling and Its Applications, 2013, 2(1): 34-38. -

计量
- 文章访问数: 92
- HTML全文浏览量: 59
- PDF下载量: 36
- 被引次数: 0
