

Dynamic safety separation calculation method for low-altitude logistics UAVs considering wind disturbance effects
-
摘要: 低空物流无人机在复杂风场环境下飞行时,风扰动显著影响飞行轨迹,传统固定安全间隔方法难以适应实际运行需求,为此,提出了一种考虑风扰动效应的安全间隔动态计算方法。建立了风扰动姿态角耦合模型,通过分析风速对无人机姿态角的影响机制,推导了偏航角、俯仰角和横滚角与风速分量的耦合关系;构建了风扰动下的位置偏差预测模型,利用全球定位系统和惯性测量单元数据进行参数拟合,建立了侧向、纵向和垂向位置偏差与风速的定量关系;提出了动态安全间隔计算方法,根据实时风场信息和飞行参数动态调整水平和垂直安全间隔。结果表明:侧向、纵向和垂向位置偏差的标准差分别为0.88、1.32、0.91 m,模型预测误差均在1.5 m以内;在相同交通流量条件下,与传统固定间隔方法相比,动态间隔计算方法可将潜在冲突次数降低约37%,同时保持95%以上的安全裕度。该方法能够有效应对风扰动对无人机飞行轨迹的影响,显著提高低空物流无人机的运行安全性和空域利用效率,可为航迹规划、冲突探测和空域管理提供理论支撑。Abstract: When low-altitude logistics unmanned aerial vehicles (UAVs) operate in complex wind field environments, wind disturbance significantly affects flight trajectories, making traditional fixed safety separation methods difficult to meet actual operational requirements. Therefore, a dynamic safety separation calculation method considering wind disturbance effects was proposed. A wind disturbance attitude angle coupling model was established. By analyzing the influence mechanism of wind speed on UAV attitude angles, the coupling relationships of yaw angle, pitch angle, and roll angle with wind speed components were derived. A position deviation prediction model under wind disturbance was constructed. Global Positioning System (GPS) and inertial measurement unit data were employed for parameter fitting to establish quantitative relationships of lateral, longitudinal, and vertical position deviations with wind speed. A dynamic safety separation calculation method was proposed to dynamically adjust horizontal and vertical safety separations according to real-time wind field information and flight parameters. The result shows that the standard deviations of lateral, longitudinal, and vertical position deviations are 0.88, 1.32, and 0.91 m, respectively, with all model prediction errors within 1.5 m. Under the same traffic flow conditions, compared with the traditional fixed separation methods, the dynamic safety separation calculation method reduces the number of potential conflicts by approximately 37% while maintaining a safety margin above 95%. This method can effectively respond to the impact of wind disturbance on UAV flight trajectories, significantly improving the operational safety and airspace utilization efficiency of low-altitude logistics UAVs. It can provide theoretical support for trajectory planning, conflict detection, and airspace management.
-

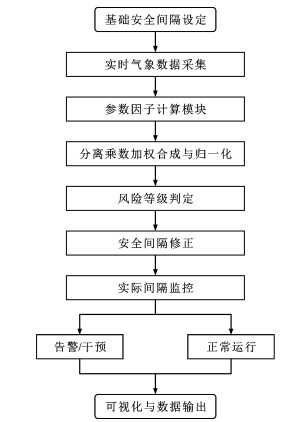
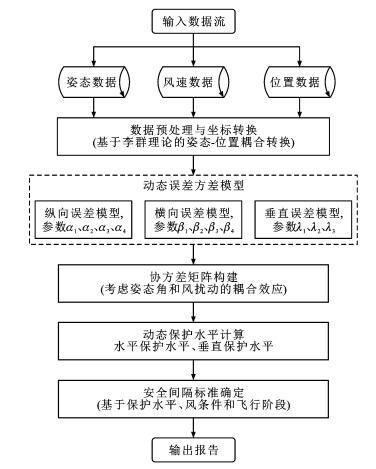
图 2 基于风力影响的安全间隔修正模块流程
Figure 2. Flow of the safety interval correction module based on wind effects

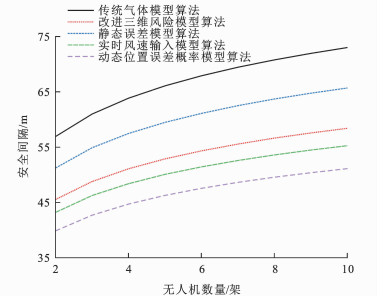
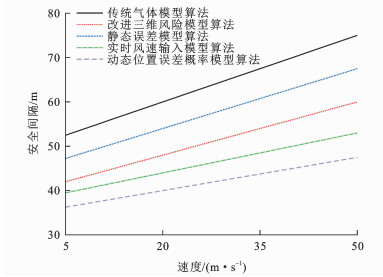
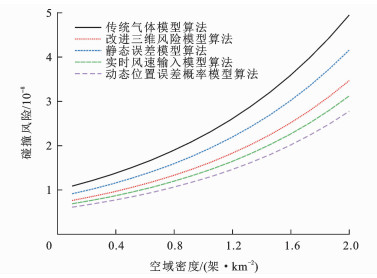
图 10 空域密度与风险关系对比
Figure 10. Comparison of relationship between airspace density and risk

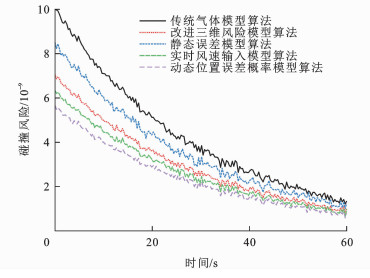
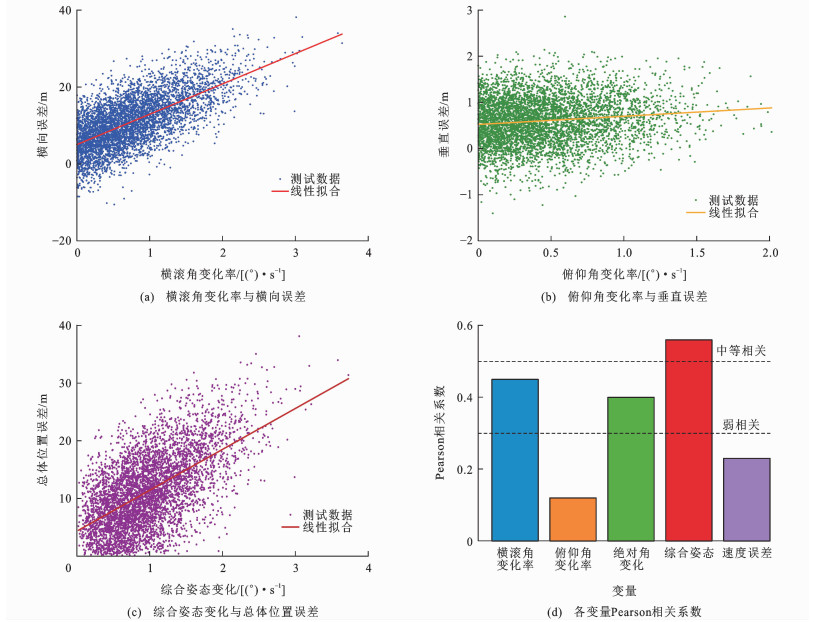
图 12 风扰代理机制有效性验证
Figure 12. Effectiveness validation of the wind disturbance proxy mechanism
表 1 模型适用性边界条件
Table 1. Applicability boundary conditions of the model
条件类别 参数 有效范围 依据 气象条件 风速/(m·s-1) 0~18 超过18 m·s-1时式(2)线性假设误差大于15% 姿态角 横滚角|φ|/(°) < 15 小角度近似条件 俯仰角|θ|/(°) < 25 小角度近似条件 飞行状态 地速/(m·s-1) 0~15 典型物流无人机巡航速度范围 高度/m 50~200 边界层效应显著的低空范围 数据采集 采样频率/Hz ≥1 满足姿态角动态变化的Nyquist采样要求  下载: 导出CSV
下载: 导出CSV
表 2 各因子计算规则与风险等级
Table 2. Calculation rules and risk levels for each factor
类型 区间 因子 说明 风速区间/(m·s-1) ≤5 1.0 风速很小,影响最小 (5, 10] 1.0~1.5 线性插值:1.0+0.5Pw (10, 15] 1.5~2.0 线性插值:1.5+0.5Pw >15 >2.0 指数增长:2.0+0.1O 能见度区间/km ≥8 1.0 能见度极佳 [5, 8) 1.2 能见度良好 [3, 5) 1.5 能见度一般 < 3 2.0 能见度较差 湍流强度区间(0~1) ≤0.2 1.0 湍流很小,影响最小 (0.2, 0.4] 1.0~1.5 二次插值:1.0+0.5Pt2 (0.4, 0.6] 1.5~2.5 二次插值:1.5+Pt2 >0.6 >2.5 指数增长:2.5+2.0O 分离乘数区间及风险等级 ≤1.2 低 风险很低 (1.2, 1.5] 中等 风险可控 (1.5, 2.0] 高 风险较高 >2.0 严重 风险极高,需警惕
下载: 导出CSV
表 3 违规事件报告(节选)
Table 3. Breach report (excerpt)
时间戳 无人机对 最小比率 关键维度 实际间隔/m 要求间隔/m 00:15:00 UAV_1-2 0.98 侧向 78.4 80.0 00:45:00 UAV_3-4 0.95 垂直 47.5 50.0
下载: 导出CSV
表 4 风扰代理变量与位置误差的相关性验证
Table 4. Correlation validation between wind disturbance proxy variables and position errors
代理变量 误差指标 Pearson相关系数 p值 横滚角变化率|dφ/dt| 横向误差 0.450 1 < 0.001 俯仰角变化率|dθ/dt| 垂直误差 0.122 8 < 0.001 横滚角|φ| 横向误差 0.394 6 < 0.001 综合姿态变化强度 总体位置误差 0.558 5 < 0.001 地速 横向误差 0.235 7 < 0.001
下载: 导出CSV
表 5 不同飞行条件下的模型泛化能力验证
Table 5. Generalization ability validation of the model under different flight conditions
变量 分组 样本量 Pearson相关系数 p值 地速 低速(0~5 m·s-1) 3 296 0.472 1 < 0.001 中速(5~10 m·s-1) 115 0.191 2 0.041 高速(10~15 m·s-1) 39 486 0.578 0 < 0.001 高度 低空(< 80 m) 4 685 0.587 7 < 0.001 中空(80~120 m) 12 584 0.501 2 < 0.001 高空(>120 m) 28 219 0.506 7 < 0.001
下载: 导出CSV
表 6 实际运行场景对比验证结果
Table 6. Comparative validation results of actual operation scenarios
方法 总违规事件数 每小时违规次数 相比基准 平均实际间隔/m 空域利用率 固定间隔 14 1.65 168.2 基准 本文方法 3 0.35 -79% 141.5 18.8%
下载: 导出CSV
-
[1] REICH P G. Analysis of long-range air traffic systems: Separation standards-I[J]. Journal of Navigation, 1997, 50(3): 436-447. doi: 10.1017/S0373463300019068 [2] BROOKER P. Longitudinal collision risk for ATC track systems: A hazardous event model[J]. Journal of Navigation, 2006, 59(1): 55-70. doi: 10.1017/S0373463305003516 [3] 王兴隆, 王友杰. 面向城市低空的多机型eVTOL安全间隔评估[J]. 航空学报, 2025, 46(1): 268-283.WANG Xing-long, WANG You-jie. Safety interval evaluation for multi-aircraft eVTOL in urban low altitude[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(1): 268-283. [4] 张健, 赵嶷飞, 卢飞, 等. 基于Event模型的城市物流无人机同高度交叉运行间隔研究[J]. 中国安全科学学报, 2025, 35(5): 99-105.ZHANG Jian, ZHAO Yi-fei, LU Fei, et al. Research on crossing operation separation of urban logistics UAVs at same altitude based on Event model[J]. China Safety Science Journal, 2025, 35(5): 99-105. [5] 陈运翔, 张建平, 王致远, 等. 基于机动避撞策略的低空多旋翼无人机安全间隔计算模型[J]. 航空学报, 2025, 46(11): 349-365.CHEN Yun-xiang, ZHANG Jian-ping, WANG Zhi-yuan, et al. Safety separation calculation model for multi-rotor drones in low-altitude airspace based on avoidance strategy[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 349-365. [6] 韩云祥, 汤新民, 韩松臣. 固定航路最优飞行冲突解脱模型[J]. 交通运输工程学报, 2012, 12(1): 115-120, 126. doi: 10.19818/j.cnki.1671-1637.2012.01.018HAN Yun-xiang, TANG Xin-min, HAN Song-chen. Conflict resolution model of optimal flight for fixation airway[J]. Journal of Traffic and Transportation Engineering, 2012, 12(1): 115-120, 126. doi: 10.19818/j.cnki.1671-1637.2012.01.018 [7] 刘铭远, 张兴俭, 耿增显. 基于速度误差的物流无人机安全放行间隔标定方法[J]. 科学技术与工程, 2025, 25(9): 3959-3967.LIU Ming-yuan, ZHANG Xing-jian, GENG Zeng-xian. Calibration method of safe takeoff interval for logistics UAVs based on speed error[J]. Science Technology and Engineering, 2025, 25(9): 3959-3967. [8] 陶江, 曹云峰. 低空时变风扰下无人机避障路径跟随方法[J]. 北京航空航天大学学报, 2025, 51(1): 175-182.TAO Jiang, CAO Yun-feng. UAV obstacle avoidance path-following method under time-varying wind disturbance at low altitudes[J]. Journal of Beijing University of Aeronautics and Astronautics, 2025, 51(1): 175-182. [9] 卢明星, 李占芳. 风扰条件下无人机自适应轨迹跟踪策略研究[J]. 机械设计与制造, 2025(10): 328-334, 339.LU Ming-xing, LI Zhan-fang. Research on adaptive trajectory tracking strategy of UAV under wind disturbance[J]. Machinery Design & Manufacture, 2025(10): 328-334, 339. [10] 王莉莉, 阳杰. 基于位置误差概率模型的物流无人机安全间隔评估方法研究[J]. 中国安全生产科学技术, 2022, 18(3): 184-192.WANG Li-li, YANG Jie. Research on assessment method of safety separation for logistics UAVs based on position error probability model[J]. Journal of Safety Science and Technology, 2022, 18(3): 184-192. [11] 张洪海, 李博文, 刘皞, 等. 自由空域下多旋翼无人机安全间隔标定方法[J]. 系统工程与电子技术, 2023, 45(10): 3149-3156.ZHANG Hong-hai, LI Bo-wen, LIU Hao, et al. Demarcation method of safety separation for multi-rotor UAV in free airspace[J]. Systems Engineering and Electronics, 2023, 45(10): 3149-3156. [12] 李姗, 张洪海, 李卓伦. 城市低空物流无人机立体航路网络规划方法[J]. 交通运输工程学报, 2026, 26(4): 50-67. doi: 10.19818/j.cnki.1671-1637.2026.037LI Shan, ZHANG Hong-hai, LI Zhuo-lun. Planning method for three-dimensional air route network of urban low-altitude logistics drones[J]. Journal of Traffic and Transportation Engineering, 2026, 26(4): 50-67. doi: 10.19818/j.cnki.1671-1637.2026.037 [13] 李楠, 孙廪实, 焦庆宇, 等. 无人机安全间隔的确定方法[J]. 科学技术与工程, 2024, 24(26): 11463-11472.LI Nan, SUN Lin-shi, JIAO Qing-yu, et al. The method for determining the safety separation of unmanned aerial vehicles[J]. Science Technology and Engineering, 2024, 24(26): 11463-11472. [14] WANG J, YANG J, YANG Z. Dynamics modeling and simulation of multi-rotor UAV based on the composite wind field model[C]//IEEE. 2022 13th International Conference on Reliability, Maintainability, and Safety (ICRMS). New York: IEEE, 2022: 127-134. [15] ALLOUCH A, KOUBAA A, ABBES T, et al. Dynamic separation for UAV traffic management in urban environments[C]//IEEE. 2019 International Conference on Unmanned Aircraft Systems (ICUAS). New York: IEEE, 2019: 1214-1223. [16] ZENG Y, ZHANG R, LIM T J. Machine learning-based position error prediction for UAV navigation[J]. IEEE Transactions on Vehicular Technology, 2020, 69(6): 6123-6134. [17] PANG B, HU Q, NIE J, et al. Adaptive separation assurance for urban air mobility using deep reinforcement learning[J]. Aerospace Science and Technology, 2023, 132: 108048. doi: 10.1016/j.ast.2022.108048 [18] 魏志强, 安心. 基于值迭代的无人机动态避撞优化方法[J]. 交通运输工程学报, 2026, 26(3): 215-227. doi: 10.19818/j.cnki.1671-1637.2026.153WEI Zhi-qiang, AN Xin. A dynamic collision avoidance method for UAVs using value iteration[J]. Journal of Traffic and Transportation Engineering, 2026, 26(3): 215-227. doi: 10.19818/j.cnki.1671-1637.2026.153 [19] DAMATO E, MATTEI M, NOTARO I. Distributed reactive model predictive control for collision avoidance of unmanned aerial vehicles in civil airspace[J]. Journal of Intelligent & Robotic Systems, 2020, 97: 185-203. [20] LEE S, CHOI J, KIM D. Risk field-based separation assurance for unmanned aircraft systems in urban airspace[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(5): 5428-5441. [21] 赵昕颐, 王岩韬, 赵嶷飞. 非合作博弈下eVTOL自主避让决策与控制方法[J]. 交通运输工程学报, 2026, 26(3): 198-214. doi: 10.19818/j.cnki.1671-1637.2026.093ZHAO Xin-yi, WANG Yan-tao, ZHAO Yi-fei. Autonomous avoidance decision and control for eVTOL based on non- cooperative games[J]. Journal of Traffic and Transportation Engineering, 2026, 26(3): 198-214. doi: 10.19818/j.cnki.1671-1637.2026.093 [22] ZHAO L, DELAHAYE D, SBIHI M. Block chain-enabled distributed separation negotiation for autonomous drones[J]. Transportation Research Part C: Emerging Technologies, 2024, 158: 104445. doi: 10.1016/j.trc.2023.104445 -

计量
- 文章访问数: 83
- HTML全文浏览量: 62
- PDF下载量: 24
- 被引次数: 0
