

Definition of autonomous ship and its autonomy level
-
摘要: 梳理了自主船舶的发展历程, 明确了自主船舶的定义, 规范了自主船舶的中英文表述, 基于船舶自主化演变路径, 分析了船舶自动化、智能化和自主化的关系; 总结了当前国际上6家权威机构提出的自主水平分级标准, 分析了其分级依据的实质与局限性; 以具体的任务情景为对象, 参考《STCW公约》有关海员适任标准中规定的7项职能, 提出了一种基于航海实践的自主水平分级方法, 依据不同的水域条件、操作复杂程度、独立于人的干预程度等因素确定任务情景等级, 并通过标定方程的计算结果确定船舶整体自主水平; 以2艘搭载自主航行技术的测试船舶为例, 对比了不同机构的自主水平分级结果。研究结果表明: 自主水平分级依据的关键在于能否独立于人的干预完成相应的任务或实现相应的功能, 而不是取决于船舶自动化水平或决策地点; 基于航海实践的自主水平分级方法能够更为客观地反映船舶的自主水平, 有效避免了由于单一功能的自主实现导致船舶整体自主水平认定不准确的弊端, 该方法科学、合理。Abstract: The development history of autonomous ship was sorted out, its definition was clarified, and its Chinese and English expressions were normalized. The relationship among the ship's automation, intelligence and autonomy was discussed based on the evolution path of autonomy. The taxonomies of autonomy level of 6 authoritative institutions in the world were summarized, the essence and limitation of taxonomy basis were deeply analyzed. Taking the task scenarios as objects and referring to 7 functions of seafarers' standards of competency in the STCW Convention, a taxonomy method of autonomy levels based on navigation practice was proposed. The method identified the levels of task scenarios according to water condition, complexity of operation, and independence from human intervention, and the overall autonomy levels of the ship were determined by the calculation result of the calibration equation. Two test ships carrying autonomous navigation technology were taking as examples, the classification results of autonomy levels of different institutions were compared. Analysis result shows that the key to the taxonomy basis of autonomy level is whether the autonomous ship can independently complete the corresponding task or achieve the corresponding function from the human intervention, rather than depending on the ship automation level or decision-making location. The taxonomy method of autonomy levels based on the navigation practice can reflect the autonomy level of the ship more objectively, and effectively avoid the disadvantage of inaccurate identification of overall autonomy level of the ship due to the autonomous implement of a single function. Therefore, the proposed method is scientific and reasonable.
-
Key words:
- marine engineering /
- autonomous ship /
- autonomy level /
- autonomous evolution path /
- task scenario /
- navigation practice
-
0. 引言
18世纪中叶以来, 人类历史上发生了3次工业革命, 人类社会逐步从蒸汽时代、电气时代发展到20世纪的信息时代, 20世纪末期大量无人驾驶研发项目的涌现[1], 在一定程度上表明以人工智能、清洁能源、机器人技术、量子信息技术、虚拟现实以及生物技术为代表的第4次工业革命的到来。而航运作为世界最传统的行业之一, 正在经历数字化的深刻变革。一份关于航运业信息技术和数字化的最新报告显示, 从2019~2027年的28年间, 全球航运业将在数字化领域投资384亿美元, 通过人工智能技术、区块链、物联网的集成, 加快推动数字化转型。作为海上货物运输的载体和传统船舶的可能替代, 绿色、安全、高效的自主船舶正受到行业的高度关注。
然而, 自主船舶并不是一个全新的概念, 某种程度上来说, 其思想来源于无人水面艇(Unmanned Surface Vessel, USV)。而USV的起源最早可追溯到1898年Tesla在纽约麦迪逊广场花园展示的一艘基于无线电控制的遥控艇[1, 2], 其实际应用始于第二次世界大战期间的军用远程遥控艇[3]。早期的USV主要用于枪炮和导弹目标系统, 1944年诺曼底登陆战役期间, 加拿大人在COMOX鱼雷概念的基础上, 曾开发出一种可按预定航向释放烟雾的远程遥控艇以满足作战的需要[4]。20世纪50年代, 军方在此基础上将其用于远程扫雷, 通过在小型登陆艇上加装无线电控制的操舵装置和扫雷装置, 进行浅海雷区扫雷, 并在过程中不间断地向其他监测系统和攻击系统报告。自20世纪70年代开始, 欧洲海军对USV的概念进行了重新审视, 开始研发由一艘母船和多艘扫雷艇组成的新一代水雷反制系统, 该系统可以有效减少人员损伤的风险, 并为具有更快速区域搜索能力的现代排雷概念提供了基础保障。有效的初步探索使得USV在军事上得以快速发展和广泛使用, 2016年10月, 英国皇家海军举办了世界上第一次大规模的海上自主系统创新示范项目“Unmanned Warrior 16”, 用以测试海上自主系统承担军事任务的潜力。2018年, 澳大利亚皇家海军在前者的基础上开展“Autonomous Warrior 18”项目, 旨在展示无人系统提升防御能力的潜力。
尽管早期军用USV的关键技术并未在民用领域进行推广和应用, 但在过去的20年间, 国际上已经开展了大量关于USV的重要研究和开发计划[5], 并取得了一定的进展。从USV的定义上来说, 其主要用于科学研究、海洋环境监测、海洋资源勘探和军事用途[6], 是船舶智能化、无人化在小型船艇上的体现。本质上, USV与自主船舶在定义、目的和应用场景上存在明显区别, 但其关键技术的研发为自主船舶的发展奠定了重要基础。
回顾民用航海科学技术的发展历程, 可以发现, 伴随着第3次工业革命先进科技的重大飞跃, 在船舶领域, 以自动化船舶为代表的成果应用在20世纪得以蓬勃发展。一般认为, 自动化船舶的发展始于20世纪50年代, 大致可分为单元自动化、机舱自动化、全船自动化3个主要阶段[7]。1961年, 世界上第一艘自动化货船“金华山丸”轮由日本三井造船公司试制成功, 其实现了机舱集中控制和驾驶台遥控主机, 并将船员从原来的52人减少到42人[8]。继“金华山丸”轮之后, 日本又相继建成了“春日山丸”等同类型的船舶, 人们把这类船舶称为第一代自动化船舶。1964年, 日本三井造船公司为丹麦建造的65 000 DWT “Selem Dam”号油轮废除了机舱夜间值班制度[8], 在一定程度上实现了“无人机舱”, 成为世界上第1艘机舱无人化的船舶。该船除了机舱集中控制和驾驶室遥控主机外, 还有火灾探测及自动灭火装置, 在机舱、驾驶室和船员居住区之间设有通信和报警装置, 并取得挪威船级社(Det Norske Veritas, DNV)的无人机舱证书, 其成功下水标志着自动化船舶进入第二代。在此基础上, 1970年日本建成了第一艘用电子计算机控制的超自动化油轮“星光丸”号, 全船由一台电子计算机对导航系统、轮机系统和舾装系统实行自动控制, 至此, 自动化船舶进入第三代。尽管电子计算机在船舶自动化方面的应用早在1966年就开始了, 法国、德国、英国等建造的自动化船舶都试验性地安装了电子计算机, 但“星光丸”号取得了日本海事协会(Nippon Kaiji Kyokai, ClassNK)的MC级证书[8], 因此, 通常把“星光丸”号作为第三代自动化船舶的代表。1977年荷兰建造的“Nedlloyd Houtman”号是世界上第一艘应用大规模集成电路和微处理机技术进行报警和监控的船舶, 至此, 使用多台微型电子计算机对导航系统、轮机系统、舾装系统等进行的分别控制成为第四代自动化船舶的标志[8]。
近年来, 人工智能技术的迅速发展, 物联网、大数据、综合船桥系统和信息物理系统的广泛应用, 使得智能船舶成为继自动化船舶后的又一重大变革。智能船舶的发展将能有效解决船舶在节能减排、人力成本和船舶安全性等方面面临的主要问题, 是未来船舶发展的必然趋势[9]。然而, 自动化船舶、智能船舶和自主船舶的概念又不尽然相同, 不能等同视之。
为进一步明确自主船舶的定义及其自主水平的科学界定, 本文从自主船舶的发展历程入手, 通过其定义、中英文表述及自主化的演变路径, 深入讨论自主船舶的内涵; 通过对比6家国际权威机构对于自主船舶的分级标准, 分析了当前自主水平分级标准中存在的问题, 进而提出一种新的自主水平分级方法; 通过2艘搭载自主航行技术的测试船舶验证了该方法的科学性和合理性, 本文的研究结论对于制定符合中国国情的自主船舶分级标准具有一定的参考意义。
1. 自主船舶的发展历程
自主船舶的概念最早是由Schönknecht在其1983年的著作《Ships and Shipping of Tomorrow》中提出的, 他将自主船舶描述为“未来的船长将在岸上的办公室履行他的职责, 船舶将会使用计算机进行导航”。随后, 日本更为深入地探索了这一概念, 为尽量减少船员成本, 相继建造了数艘自动化船舶。随着科技水平的不断提高, 2006年, 国际海事组织(International Maritime Organization, IMO)提出e-Navigation的概念, 旨在通过电子信息手段, 对船岸的海事信息进行统一的收集、集成、交换、展示和分析, 实现船船、船岸和岸岸之间信息的相互沟通, 增强船舶在泊位至泊位间的航行及相关服务, 以达到船舶安全、经济航行和环境保护的最终目标。2014年11月, e-Navigation战略实施计划(Strategy Implementation Plan, SIP)在IMO海事安全委员会(Maritime Safety Committee, MSC)第94届会议批准实施, e-Navigation SIP识别出5项优先的解决方案和18项工作任务。该战略的实施在一定程度上为船舶智能化的发展奠定了基石, 完善了自主船舶发展的前提条件。
2012年9月, 欧盟启动基于智能网络的海上无人驾驶(Maritime Unmanned Navigation Through Intelligence in Networks, MUNIN)项目, 以自主船舶为研究对象, 旨在从技术、经济和法律等3个方面对无人商船的可行性进行评估, 案例船为航行在欧洲和南美洲的一艘灵便型干散货船, 该项目为期36个月, 由来自德国、挪威、瑞典、冰岛及爱尔兰的8家科研单位共同完成[10]。MUNIN主要解决从引航点到引航点的无人远洋运输问题, 进港和靠离泊操作仍由船上的常规船员完成。2014年9月, DNV-GL船级社发布适用于短途航行的概念船“ReVolt”, 该船长60 m, 采用无人设计, 由3 000 kW·h的电池驱动, 平均航速6 kn, 单次航程100 n mile, 舱容100 TEU, 预计每年可节省100万美元。2015年12月, 中国船级社(China Classification Society, CCS)发布《智能船舶规范》, 将智能船舶定义为“利用传感器、通信、物联网、互联网等技术手段, 自动感知和获得船舶自身、海洋环境、物流、港口等方面的信息和数据, 并基于计算机技术、自动控制技术和大数据处理分析技术, 在船舶航行、管理、维护保养、货物运输等方面实现智能化运行的船舶, 以使船舶更加安全、更加环保、更加经济和更加可靠”。2016年初, 挪威海事局、挪威海岸管理局、挪威工业联合会和挪威海洋科技研究中心共同倡议组建挪威自主船舶论坛(Norwegian Forum for Autonomous Ships, NFAS), 旨在促进完全或部分无人驾驶船舶成为欧洲和世界未来交通系统的重要组成部分。同年6月, 首届无人驾驶船舶技术研讨会在荷兰阿姆斯特丹举行, 英国Rolls-Royce公司介绍了由其领导的高级自主水运应用倡议(Advanced Autonomous Waterborne Applications Initiative, AAWA)项目, 并发布AAWA项目白皮书[11], 阐述了如何实现遥控以及对无人驾驶船舶的未来愿景。该项目在芬兰对一系列传感阵列在不同的运营和气候条件下进行试验, 并通过已创建的模拟无人驾驶船舶控制系统对整体通信系统的行为进行研究[12]。根据目前的进展, 预计将在2020年实现自主船舶的短途航行, 2025年实现远洋航行。
2017年5月, Yara公司和Kongsberg公司宣布合作建造世界上第一艘全电动自主集装箱船“Yara Birkeland”号, 舱容120 TEU, 实现船舶零排放, 装配光学雷达、自动识别系统(Automatic Identification System, AIS)、红外摄像头等传感器, 预计最早于2020年正式发布; 6月7日至16日, IMO在MSC第98届会议中首次提出海上自主水面船舶(Maritime Autonomous Surface Ships, MASS)的表述, 建议针对其开展监管范围界定活动(Regulatory Scoping Exercise, RSE), 以评估在当前IMO条款中自主船舶可能存在的适用障碍, 鼓励各成员国和国际组织就该议程向MSC第99届会议提交实质性的提案和评论[13]; 6月20日, 在AAWA项目的基础上, Rolls-Royce公司和全球拖轮运营商Svitzer公司在丹麦哥本哈根港成功地展示了一艘28 m的“Svitzer Hermod”号拖船的远程遥控操作, 首次实现了商船的远程操作; 6月28日, 由海航科技物流集团与CCS共同推动的无人货物运输船开发联盟在上海成立, 是中国首个无人货物运输船领域的合作组织, 成员包括美国船级社(American Bureau of Shipping, ABS), 该联盟的成立标志着中国海洋货物运输船无人化变革序幕的拉开; 10月30日, 在NFAS的基础上, 国际自主船舶网络(International Network for Autonomous Ships, INAS)在奥斯陆成立, 其是关于无人驾驶船舶、自主船舶或智能船舶的国家或地区利益组织的非正式小组。目前, 已与英国、芬兰、韩国、德国、美国、加拿大、丹麦、新加坡、日本、比利时、瑞典、中国、澳大利亚等19个国家和地区的组织开展实质合作; 12月5日, 中国自主研发的全球首艘通过劳氏船级社(Lloyd's Register, LR)和CCS认证的智能船舶“大智”号正式交付并投入使用, 其可以实现智能航行、智能机舱、智能能效管理等多方面功能, 为船舶智能化乃至航运智能化奠定了坚实的基础; 同月, 法国船级社(Bureau Veritas, BV)发布NI 641自主航运指南, 为使用自主系统的船舶和离岸设施的风险评估提供了一个监管框架。
自主船舶的研究在2018年取得了众多实质性进展。丹麦海事局(Danish Maritime Authority, DMA)为协助MSC第99届会议中对于梳理MASS法规范围工作的开展, 1月向MSC提交了自主船舶运营中有关法规适用障碍的分析报告, 报告主要针对自主船舶发展中可能遇到的法律法规适用障碍进行了系统化的分析, 并依据分析结果提出相应的建议[14]; 1月16日, 由南通中远川崎船舶工程有限公司建造的20 000 TEU超大型集装箱船“白羊座”号交付中远海运集装箱运输有限公司, 是全球迄今为止第一艘收到LR网络准入船舶(Cyber-Enabled Ship, CES)AL3级描述性说明的集装箱船; 4月, Wärtsilä公司在船舶自动靠离泊领域取得突破性进展; 5月16日至25日, MSC第99届会议已着手研究如何在IMO框架下解决安全、可靠和环保的MASS运营问题[15], 根据会议的研究结论, MSC已认可了RSE的框架, 并围绕MASS法规梳理的目标、定义、范围、方法、工作计划进行了深入讨论, 此次会议已对法规梳理的范围达成一致意见, 并形成了需要梳理的法律文件清单; 8月30日, CCS以涵盖实现自主船舶的远程控制和完全自主运行的技术要求为目的, 发布《自主货物运输船舶指南》; 继4月的成功展示后, 11月, Wärtsilä公司在无人为干预的情况下, 首次尝试在“Folgefonn”号渡轮上进行码头到码头的自主航行试验, 并取得成功; 12月4日, ABB公司在赫尔辛基港附近的试验区对一艘经态势感知解决方案改装的“Suomenlinna II”号冰区客轮进行了远程操作测试, 结果证实了人类对冰区航行船舶有效监督的可行性; 几乎在同一时间, Rolls-Royce公司和芬兰国有轮渡运营商Finferries成功演示了世界上第一艘完全自主的“Falco”号轮渡, 其可以实现远程控制、自主导航和自动靠离泊而无需人为干预; 12月3日至7日, MSC第100届会议批准了RSE的框架和方法, 明确RSE将涵盖《国际海上人命安全公约》、《1972年国际海上避碰规则公约》等多项国际公约, 同时, 同意制订MASS临时试验指南[16, 17]; 12月30日, 中国工业和信息化部、交通运输部、国防科工局联合印发《智能船舶发展行动计划(2019~2021年)》, 明确提出初步建立智能船舶规范标准体系, 谋求突破航行态势智能感知、自动靠离泊等核心技术。
2019年4月9日, 新加坡海事及港务局宣布成立海事创新实验室, 旨在创造一个承载创新港口服务和智能船舶操作的试验和测试环境, 并与行业合作伙伴启动5个自主船舶项目; 5月, 中国交通运输部联合中共中央网络安全和信息化委员会办公室、国家发展改革委、教育部、科技部、工业和信息化部、财政部等7部门发布《智能航运发展指导意见》, 为智能航运未来30年发展指明方向。同月, 由中国船舶重工集团公司第704研究所与交通运输部水运科学研究院、智慧航海(青岛)科技公司合作建造的“智腾”号自主航行试验船, 成功地展示了自主航行实船避碰试验; 6月5日至14日, MSC第101届会议审议了RSE的进展报告, 并批准MASS临时试验指南[18, 19]; 9月, 中共中央、国务院印发《交通强国建设纲要》, 提出强化智能船舶的自主设计建造能力; 11月, 韩国产业通商资源部和海洋水产部联合发布公告, 正式启动自动航行船舶开发项目, 计划投资1 603.2亿韩元, 旨在促进韩国环保智能航运业的发展; 12月15日, 由中国云洲智能研发的“筋斗云0号”自主航行货船成功完成货物运载试验, 该船按照CCS《沿海小船入级与建造规范》要求设计和建造, 船体参照国际拖曳协会推荐的KVLCC2线型, 船长12.9 m, 船宽3.8 m, 吃水1.0 m, 设计航速8 kn, 未来将按照IMO《MASS临时试验指南》进行多船会遇避碰、自主靠离泊等试验。
通过对自主船舶发展历程的梳理可知, 越来越多的利益相关组织对自主船舶的发展和创新表达了浓厚的兴趣, 其已成为业界的热点问题和未来的发展方向。同时, 自主船舶的探索研究正取得重大进展, 以挪威、芬兰为代表的主权国家和以Kongsberg、Wärtsilä为代表的行业公司已成为自主船舶发展的标杆。然而, 截至目前, 自主船舶的定义和自主水平的分级标准仍未达成共识, 在一定程度上阻碍了自主船舶的发展和投入实际运营的进程。
2. 自主船舶的定义与自主化演变
2.1 自主船舶的定义
“autonomous ship”是国际上公认的自主船舶的英文表述, 但类似的英文表述有近10种之多, 例如“smart ship”“intelligent ship”“unmanned ship”“unmanned vessel”“unmanned surface vehicle”“unmanned surface vessel”等, 中文表述则有“无人船(舶)”、“无人驾驶船(舶)”、“智能船(舶)”、“岸基遥控船(舶)”、“智慧船(舶)”等。不同表述混合或交替使用, 部分科研人员、政府官员、行业从业人员采用不同的表达描述几乎相同的含义, 定义模糊、范围不清, 极易导致混淆, 在一定程度上制约着自主船舶的发展, 因此, 明确自主船舶的定义并规范其中英文表述是十分迫切的。
至今, 国际上对于自主船舶的定义仍未形成完全统一的意见, 部分学者、相关国际组织和船级社对自主船舶有着不同的描述和解读, 见表 1。从避免限制自主船舶发展的角度出发, 秉持慎重原则, MSC第99届会议仅对自主船舶进行了初步定义, 并根据该定义识别影响自主船舶运营的现行法律法规文件以及相关适应性的问题。
表 1 自主船舶的定义Table 1. Definitions of autonomous ship出处 时间 英文原文 中文译文 MUNIN[10] 2012年 Next generation modular control systems and communications technology will enable wireless monitoring and control functions both on and offboard. These will include advanced decision support systems to provide a capability to operate ships remotely under semi or fully autonomous control. 下一代模块化控制系统和通信技术在船载或船外将实现无线监控和控制功能, 包括先进的决策系统以提供在半自主或全自主控制下远程操纵船舶的能力。 Bertram[2] 2016年 An autonomous ship is a ship that “has systems based on automated software that may advice human operators, or at the highest level of autonomy replace human decision making and action”. 自主船舶是指“具有基于自动化软件的系统, 可以向操作人员提供建议或在最高自主等级中取代人的制定决策和采取行动”的船舶。 ABS[20] 2016年 Marine vessel with sensors, automated navigation, propulsion and auxiliary systems, with the decision logic to follow mission plans, sense the environment, adjust mission execution for the environment, and operate without human intervention. 配备传感器、自动导航、推进和辅助系统的船舶, 并具备遵循任务计划、感知环境、根据环境调整任务执行且无需人为干预的决策逻辑。 NFAS[21] 2017年 An autonomous ship is a ship, that has some level of automation and self-governance. 自主船舶是具有一定自动化和自治等级的船舶。 BV[22] 2017年 Ship having the same capabilities as those of a smart ship and including autonomous systems capable of making decisions and performing actions with or without human in the loop. An autonomous ship may be manned with a reduced crew or unmanned with or without supervision. 自主船舶具有与智能船舶相同的能力, 并且包括在有人或无人的情况下能够制定决策并执行行动的自主系统。自主船舶可以实现减少船员配备、无人驾驶或无人监督。 DMA[23] 2017年 Ships capable of providing—via automatic processes—decision-support or a possibility of taking over parts of or the entire human control and management of the ship, irrespective of whether the control is exerted from the ship or from somewhere else. 通过自动过程能够提供决策支持或可能接管的由部分或全部人员控制和管理的船舶, 而不论是从船上还是其他地方施加控制。 IMO 2018年 Maritime autonomous surface ship (MASS) is defined as a ship which, to a varying degree, can operate independent of human interaction. 海上自主水面船舶被定义为在不同程度下, 可以独立于人的干预的船舶。 由表 1可知, “自动”、“制定决策”、“控制”、“远程”、“无人”、“自主”等关键词在自主船舶的定义中频繁出现, 这表明了现阶段人们对于自主船舶的认识、理解和需求。通过自主船舶的发展历程可以知道, 不同的关键词对应着自主船舶不同的发展阶段, 不同的发展阶段与不同的自主水平相匹配。因而, 自主船舶的定义对于准确、清晰地划分自主船舶的发展阶段和自主水平分级标准有着至关重要的影响。从“autonomous”和“自主”2个关键词来看, “autonomous”的英英解释是“independent and having the power to make your own decisions”, 强调独立和自我决策; “自主”在新华字典中的解释是“自己做主, 不受支配”, 中英2个关键词的释义均表达了“独立”和“不受支配”的内涵, 从另一角度再次印证了将“autonomous ship”译为“自主船舶”的合理性。在参考关键词内涵的基础上, 为突出自主船舶在单次航程、不同水域中可能处于一种或多种自主水平的特点, 本文将自主船舶定义为“在不同自主水平下, 能够提供相应的辅助决策, 或可以独立于人的干预而自主制定决策并执行决策的船舶”。
此外, 从现有的中英表述和定义上来看, 现阶段仍有较多的从业人员和部分学者不能准确区分“autonomous ship”与“unmanned ship”, 特别是“autonomous”和“unmanned”在修饰船舶方面是否具有包含关系, 以及两者的层级关系。通过前文对自主船舶的不同表述、定义进行的系统分析, 本文认为“autonomous”意味着船舶可以在没有或减少船员监视或关注的情况下执行一组定义的操作行为, 但并不意味着船上没有船员; 而“unmanned”意味着船舶驾驶台上没有船员执行或监督操作, 但船员可以在岸上或其他地方对船舶施加控制, 因此, 无人驾驶船舶(无人船)应是自主船舶发展中的一个重要阶段, 是自主船舶达到高阶自主水平的产物。
2.2 船舶自主化的演变
在船舶的发展历程中, 特别是20世纪以来, 自动化船舶、智能船舶、自主船舶的概念相继出现, 对航运业产生了深远的影响, 因此, 三者间的区别与联系需要被清晰地描述, 减少不必要的误解和混淆, 确保实现航运业的数字化转型。
自动化船舶是利用自动化装置承担船舶的自动化任务, 在某些任务情景中代替人工操纵和管理船舶。“automatic”被译为“自动的”、“自动化的”, 一般是被用于过程的通用语言, 意为通过多种信息化手段使船舶能够在无人控制的情况下进行某些操作, 其名词形式“automation”多指机械工作过程中对计算机指令的响应能力, 是已预设的决策和控制程序, 系统无需根据实际情况以任何不同的方式进行任何选择。随着船舶自动化程度的逐渐提高, “智能船舶”进入人们的视野。在“人工智能科学”中的“智能”使用的是“intelligence”, 剑桥英英词典将其解释为“学习、理解、判断或基于理性意见的能力”。在现行的通用解释中, “智能化”是指事物在网络、大数据、物联网和人工智能等技术的支持下, 所具有的能动地满足人的各种需求的属性, 即具有思考、认知的能力, 是自动化的最终目的。与自动化、智能化有所区别的是, “自主化(autonomy)”用于描述工程系统在执行不同任务时自行决定其行为而无需外部系统或人员参与的能力。
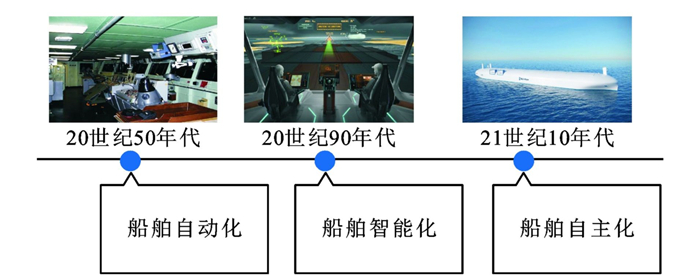
在航海实践领域, 智能化与自动化在执行过程、结果和操作的指令上区别不大, 其差异主要体现在操作手段上。自动化是在机械化的基础上, 加上控制系统, 从而实现部分去人工化, 全自动化则是自动化的更高级革新。而智能化是自动化发展的最高阶段, 不仅应有全自动化的固定模式, 还应有智慧化的决策和判断能力[12]。当“autonomous”与“ship”链接使用时, 挪威科技大学从事自主船舶研究的学者将“autonomous”定义为“由计算机导航和操纵, 在定义的一系列情景与条件下, 无需或限制的需要人为控制或干预”[24, 25]。对于智能船舶来说, 自主船舶是其发展的高级阶段, 相对于传统船舶, 自主船舶将是一个各系统高度集成的船舶。自主船舶中使用的“autonomous”明确体现了船舶的“自我治理”和“自主”, 其是将自动化应用于船舶的结果, 并具有自主决策的能力。总的来说, 船舶自动化、智能化和自主化是科技水平发展的连续体(图 1), 若为三者的功能设置特定的标准或进行明显的区分, 并不具有实际意义。
3. 自主水平分级标准
根据上述对自主船舶的分析可知, “automatic”是针对机(械)器、仪器、设备和系统等物件(不包括船舶本身)的动作和功能而言的, “autonomy”是针对船舶的水平和能力而言的, 而“autonomous”主要是针对人(们)的管理和决策而言的。目前研究自主船舶分级标准的相关学者大多不具有航海实践经验, 对良好船艺和海员通常做法并不十分熟悉, 其针对自主船舶自主水平的划分多从船舶自动化水平和决策地点的角度出发。但航海领域的专家学者和船舶驾驶人员更加关心的是自主船舶能否实现真正的功能替代, 如航行、货物装卸和积载、维护和维修、发生海上事故时的应急处置等, 自主完成《1978年海员培训、发证和值班标准国际公约》(InternationalConvention on Standards of Training, Certificationand Watchkeeping for Seafarers, 1978)(简称《STCW公约》)海员适任标准中规定的职能, 使船员逐步从简单的任务中脱离出来, 因此, 有必要对现有的自主水平分级标准进行分析和讨论。
通过查阅目前国际上自主水平分级标准的文献资料, 以发布的时间为序, 本文分别对LR、NFAS、DMA、英国海事自主系统规范工作组(Maritime UK Autonomous Systems Regulatory Working Group, MASRWG)、BV、IMO等6家权威机构的分级标准展开分析。
3.1 LR自主水平分级标准
在针对船舶的自主水平分级中, 2016年7月8日, LR在《ShipRight程序指南》中将船舶的自主水平分为AL0~AL6共7个等级[26], 是全球权威机构首次对船舶的自主水平进行等级划分, 也是自主水平分级领域中的标志性文件。在该分级标准中, 无自主功能的普通船舶为“AL0”, 具有自主功能的自主船舶分为AL1~AL6共6个等级[27, 28], 如表 2所示。2017年2月, 在ShipRight程序指南的基础上, LR发布《无人驾驶船舶系统规则》[29], 旨在采用结构化方法对无人驾驶船舶系统进行评估, 以满足一系列安全和运营性能的要求。
3.2 NFAS自主水平分级标准
2017年10月10日, NFAS在其经批准后的第一个公开版本[21]中, 将自主船舶分为自主辅助驾驶台(Autonomy Assisted Bridge, AAB)、定期无人驾驶台(Periodically Unmanned Bridge, PUB)、定期无人驾驶船舶(Periodically Unmanned Ship, PUS)和持续无人驾驶船舶(Continuously Unmanned Ship, CUS)4类, 见表 3。同时, 自主船舶的操作自主水平被分为决策支持、自动化、受限自主和完全自主4个等级, 见表 4。在此基础上, NFAS定义了6种自主水平, 分别面向有人驾驶台和无人驾驶台, 见表 5。
表 2 LR自主水平分级标准Table 2. Taxonomy of autonomy levels by LR自主水平 描述 AL0 手动(无自主功能): 所有行动和决策均由手动执行, 即船员控制船舶所有行动。 AL1 船载决策支持: 控制人员执行所有在船操作, 但决策支持工具可以提供选项或以其他方式影响其选择的操作。 AL2 船载或岸基决策支持: 控制人员执行所有在船操作, 但决策支持工具可以提供选项或以其他方式影响其选择的操作; 数据可以由船上或船外的系统提供。 AL3 控制人员监督和授权执行: 由控制人员监督在船决策和行动的自主执行, 控制人员有权对高影响力决策进行干预; 数据可以由船上或船外的系统提供。 AL4 控制人员监督执行并有权干预: 由控制人员监督所有决策和行动的自主执行; 控制人员有权对高影响力决策进行干预。 AL5 受监督的自主: 由系统制定的决策和采取的行动很少受到监督或无监督。 AL6 完全自主: 由系统制定的决策和采取的行动不会受到监督。 表 3 NFAS自主船舶分类Table 3. Classification of autonomous ships by NFAS类别 描述 AAB 船舶手动驾驶, 船员可以立即干预正在进行的活动。 PUB 驾驶台无船员, 但船舶仅能在开阔水域或良好天气的情况下有限的时间运行; 船员在船, 遇到问题时可随时前往驾驶台。 PUS 驾驶台无船员, 船舶可长时间运行, 如在深水航道航行, 或在进港、离港阶段, 由登船队登船或护卫船抵进以控制船舶。 CUS 船舶专为全天候无人驾驶设计, 除非处于紧急情况, 否则船上无人被授权控制船舶。(注: 此阶段仍有可能有人在船, 如乘客或维修人员) 表 4 NFAS操作自主水平分级标准Table 4. Taxonomy of operational autonomy levels by NFAS操作自主水平 描述 决策支持 船员直接控制船舶操作, 并持续监督所有操作, 无自主功能。 自动化 船舶具有更先进自动化系统, 无需人工干预即可完成某些预定操作, 如动力定位或自动靠离泊。自动操作遵循预编程序执行, 发生任何意外事件或事件已完成将请求人工干预。船员或岸基控制中心(Shore Control Centre, SCC)可随时直接或远程控制。 受限自主 船舶在大多数情景可自主运行, 解决预定义选项的常见问题, 如避碰等。如果在限制范围内无法自主执行, 系统会请求人工干预。船员或SCC将保持持续监督, 并在系统请求时立即介入。 完全自主 船舶自主处理所有情景, 将不存在船员和SCC。 表 5 NFAS自主水平分级标准Table 5. Taxonomy of autonomy levels by NFAS自主水平 有人驾驶台 无人驾驶台(有船员在船) 无人驾驶台(无船员在船) AAB/PUB PUB PUS/CUS 决策支持 直接控制(无自主) 远程控制 远程控制 自动化 自动化驾驶台 自动化船舶 自动化控制 受限自主 受限自主 受限自主 完全自主 完全自主 3.3 DMA自主水平分级标准
DMA在其提交给IMO的分析报告[23]中, 将船舶自主水平分为M、R、RU和A级, 并详细阐述在不同自主水平下船舶操作员的角色内容, 强调对于自主船舶的法律障碍将是动态的, 会根据其具体运行的自主水平而变化, 见表 6。DMA自主水平分级标准在一定程度上参考了LR自主水平分级标准, 其中, A级与AL6级均表明系统已经具备自主决策、行动和对周围船舶交通行为进行预测的能力, 如果系统出现故障或提示人为干预, 则由岸基控制人员参与决策。
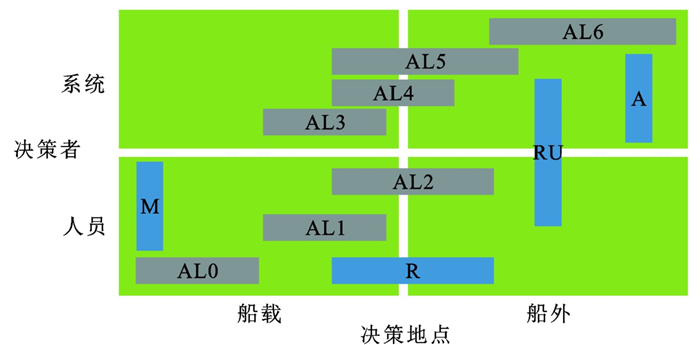
表 6 DMA自主水平分级标准Table 6. Taxonomy of autonomy levels by DMA自主等级 描述 M 配备自动系统和辅助决策的手动操纵船舶 R 有船员在船的远程控制船舶 RU 无船员在船的远程控制船舶 A 完全自主船舶 本文基于决策者和决策地点的不同将LR自主水平分级标准与DMA自主水平分级标准进行比较, 两者的关系见图 2。
 图 2 LR与DMA自主水平分级标准的关系Figure 2. Relationship between LR and DMA of autonomy level taxonomy
图 2 LR与DMA自主水平分级标准的关系Figure 2. Relationship between LR and DMA of autonomy level taxonomy从AL3级和R级开始, 系统决策所占的比例越来越高, 所需的船舶配员越来越少, 船员仅需对部分复杂度、影响度较高的决策进行授权执行。需要思考的是, 当船舶进入AL4和R级开始, 将由岸基控制人员代替船员对船舶航行进行监控和授权, 如何评估岸基控制人员的适任能力, 以及能否将适任的岸基控制人员和具有人工智能的决策系统作为适任船员的替代方案仍需进一步评估。
3.4 MASRWG自主水平分级标准
2014年9月, 英国政府资助成立了MASRWG, 旨在识别和确认现行IMO规范体系中对于海事自主系统存在的空白及其解决方法。2017年11月16日, MASRWG在南安普顿第3次会议上发布了《自主海事系统的设计、建造和运营行业规范》[30], 并于2018年11月发布2.0版本。该规范从控制能力的角度将MASS的自主水平分为0~5共6个等级, 其中, 0级为人工操作, 1~5级被设定为无人驾驶船舶, 如表 7所示。
表 7 MASRWG自主水平分级标准Table 7. Taxonomy of autonomy levels by MASRWG自主等级 描述 0 载人: 船舶由船上操作人员控制。 1 操作: 在操作控制下, 操作人员控制所有认知功能。操作人员通过无线电或电缆与无人驾驶船舶直接相连, 并制定所有决策, 指导和控制所有任务功能。 2 决策: 在直接控制下, 无人驾驶船舶具有一定程度的推理和响应能力。系统可以感知环境、报告船舶状态, 并向操作人员提供行动建议, 但由操作人员授权决策。无人驾驶船舶仅能在命令或允许的情况下采取行动。 3 委托: 无人驾驶船舶被授权执行某些功能。系统可以感知环境、报告船舶状态、定义行动和报告意图。在一定时间内, 操作人员可以否决系统的意图, 否则船舶将采取相应的行动。无人驾驶船舶具有自主决策的能力, 并与操作人员共享决策。 4 监控: 无人驾驶船舶将感知环境、报告状态、制定决策、采取行动和报告行动, 操作人员可以对事件进行监控。 5 自主: 无人驾驶船舶将感知环境、报告状态、制定决策、采取行动, 并在系统能力和限制的范围内提供最大程度的独立性和自我判断。船载系统在由其确定的情况下调用自主功能, 而无需通知其他的外部单位或操作人员。 3.5 BV自主水平分级标准
2017年12月, BV发布《自主航运指南》[22], 对可用于提高自主船舶(至少500 GT, 不包括小型船舶、USV等)运输自主能力的设计或系统操作提出了相应的建议。该标准将自主水平分为0~4共5个等级, 其中, 0级为人工操作, 4级为完全自主, 如表 8所示。
3.6 IMO自主水平分级标准
在2018年5月的MSC第99届会议上, IMO采用了DMA分析报告中对于船舶自主水平的分级标准, 将MASS的自主程度分为配备自动系统和辅助决策的船舶、有船员在船的远程控制船舶、无船员在船的远程控制船舶和完全自主船舶4个等级, 并强调MASS在航行期间可能以一个或多个自主程度航行, 具体解读参见DMA自主水平分级标准。
表 8 BV自主水平分级标准Table 8. Taxonomy of autonomy levels by BV自主等级 描述 0 人工操作: 人工制定所有决策和控制所有功能。 1 人工决策: 系统提供决策支持, 人工制定决策并采取行动。 2 人工授权: 系统决策, 但需要人工授权执行。在一定时间内, 可以进行人工干预。 3 人工监督: 系统无需等待人工授权即可决策、执行。但人员会被告知系统的决策和行动。 4 完全自主: 系统无需通知控制人员即可进行决策、执行。仅在紧急情况下才会通知人员。 4. 自主水平分级标准的划分依据
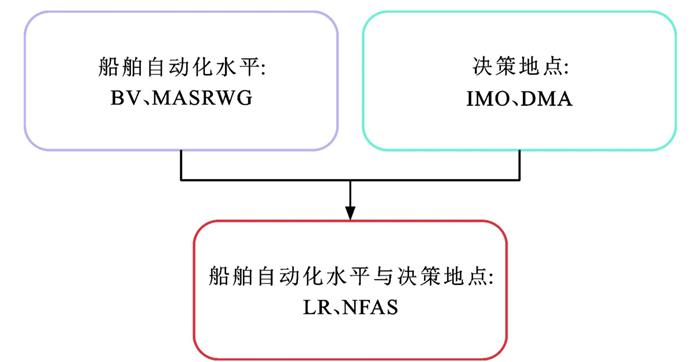
根据对上述6家权威机构自主水平分级标准的分析, 自主水平的划分主要反映在船舶驾驶系统和控制水平上, 其分级标准主要依据船舶自动化水平、决策地点或船舶自动化水平与决策地点, 见图 3, 力求证明船舶自动化水平越高, 则自主水平越高, 或单一地将是否有船员在船进行监控、干预, 即决策地点的不同作为自主水平划分的依据, 这显然不够科学。
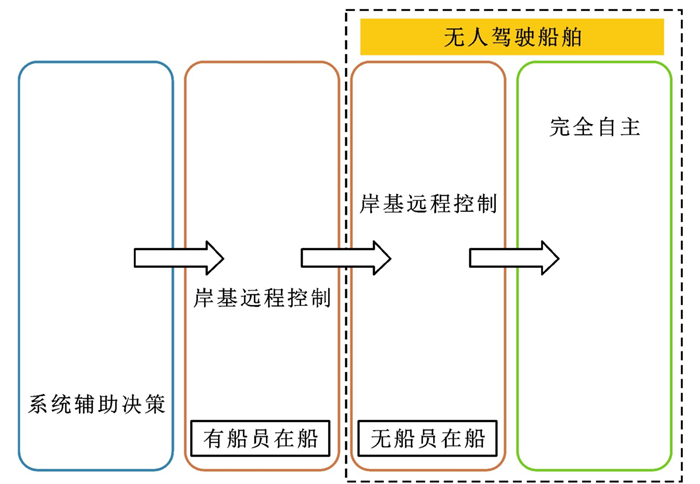
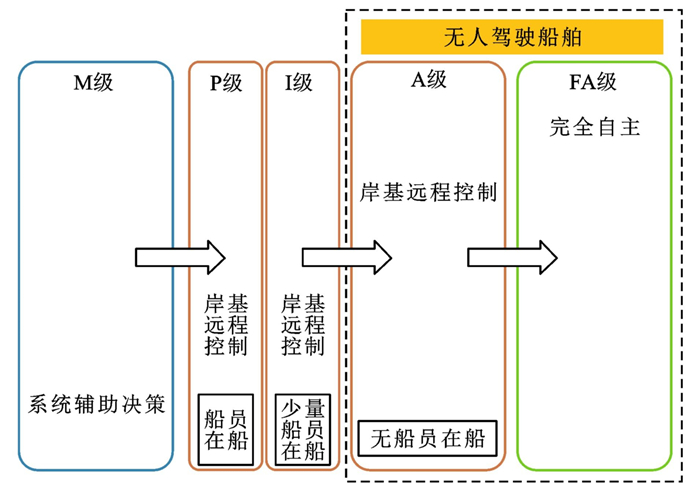
自动化水平和自主水平两者间不存在相应的逻辑关系, 不能将其等同对待。船舶的自动化水平越高, 说明船舶的设备、系统或过程控制可以根据人的要求, 准确地实现预期目标, 但需要人的监控、授权和批准。而自主船舶的目的是要实现船舶的自主思考、决策和行动, 可以试想, 某船具备高阶自动化水平, 但无法“独立于人的干预”完成预期任务, 则认为该船的自动化水平较高, 而自主水平较低。同时, 自主船舶的决策地点并不是其发展的关键因素, 即便在岸基远程遥控阶段, 船舶并未摆脱人的控制, 其与船员直接控制船舶的本质是相同的, 区别仅体现在输出控制的方式不同, 因此, 不能简单地以决策地点作为划分自主水平的依据, 而关键在于能否“独立于人的干预”完成相应的任务或实现相应的功能。根据现有的研究成果, 船舶自动化水平会影响决策地点, 而同时考虑船舶自动化水平和决策地点的分级标准可以较准确地描述自主船舶在发展中所处的不同阶段, 有助于明确人类的角色定位和需要担负的责任。总的来说, 自主船舶的发展将是一个长期的过程, 势必要经过系统辅助决策、岸基远程控制、完全自主3个阶段, 其中, 当发展到岸基远程控制的高级阶段(无船员在船)时, 自主船舶则进入无人驾驶阶段, 发展路线见图 4。
自主船舶是以人工智能科学技术的发展和应用为基础的, 而其之所以被称为“自主”, 主要体现在人的控制操作或所发挥的作用将逐步由船舶自主完成, 船舶会像人(船员)一样能感知、能思考、能决策、能行动等。就现阶段而言, 自主船舶的经济性和所带来环保效益是其发展的动力来源, 但必须确保自主船舶的最低安全水平应至少等同或高于传统船舶, 海上交通风险等级符合可接受准则[31]。然而, 在未来相当一段时间内, 自主船舶的“自主”主要反映在自主航行(导航、操纵、避碰等)上, 如果想要实现船体的自主维修(堵漏等)、船舶仪器设备硬件故障的自主维修(更换零部件)和发生海上事故的自主应急处置, 除非派遣船体、船舶仪器设备维修人员和应急处理人员在意外情况发生时登船以维护、控制船舶, 或在自主船舶上配备具有上述功能的智能机器人以远程控制或完全自主的方式完成相应的任务情景操作。
5. 基于航海实践的自主水平分级方法
自主水平的划分与多种因素有关, 有研究[32]通过对自主水平的12种不同分级标准进行检验, 并以19个水平特征将其进行分类, 部分研究成果已在船舶领域得以应用。根据自主船舶的定义, 其具有在单次航程、不同水域中可能处于一种或多种自主水平的特点, 自主水平会根据执行任务的复杂程度动态变化, 进而影响人的输出控制的方式和需要担负的责任, 因此, 以船舶自动化水平、决策地点或船舶自动化水平与决策地点为划分依据的自主水平分级标准仍难以解决自主船舶在实际运营中面临具体问题。
本文基于同等安全性原则(即无论何种自主水平的船舶, 其安全性至少与船员手动控制船舶的安全性相当[33, 34]), 提出基于航海实践的自主水平(Autonomy Levels based on Navigation Practice, ALNP)分级方法, 以具体任务为对象, 参考《STCW公约》有关海员适任标准中规定的7项职能, 构建自主船舶任务情景表, 依据不同水域条件、操作的复杂程度、独立于人的干预程度等因素确定任务等级, 最后通过构建的自主水平标定方程得到自主船舶的自主水平。
该方法将自主水平划分为5个等级, 其中, FA级对应LR自主水平分级标准中的AL6级和IMO自主水平分级标准中的A级, 具体分级标准如下。
(1) M(Manual)级:
由船员手动控制船舶, 船载辅助决策系统或岸基支持系统可提供决策支持或有限的自动控制, 船舶无自主能力。
(2) P(Primary)级:
船员在船, 船舶仅能自主完成比较简单的特定任务情景, 且由船员或岸基控制人员监督执行, 必要时可以请求人工干预; 高自主等级任务情景由船员或岸基控制人员直接控制或授权执行。
(3) I(Intermediate)级:
少量船员在船, 船舶能够自主完成比较复杂的特定任务情景, 由船员或岸基控制人员监督执行, 必要时可以请求人工干预; 高自主等级任务情景由船员或岸基控制人员直接控制或授权执行。
(4) A(Advanced)级:
无船员在船, 船舶能够自主完成复杂的特定任务情景, 由岸基控制人员监督执行; 仅在紧急情况下、系统请求介入时进行干预。
(5) FA(Fully Autonomous)级:
船舶能够自主完成所有任务, 已具备完全自主能力, 无需船员和岸基控制人员的监督; 仅在紧急情况下、系统请求介入时进行干预。
自主船舶任务情景被分为4种类别, 分别为航行、货物装卸和积载、维护和修理、应急操作和应急处置, 共包括24项, 如表 9所示。根据自主完成任务情景的复杂程度, 由易到难将其划分为4个等级, 如表 10所示。任务情景的状态有2种, 即自主实现和非自主实现, 其布尔值输出以二进制编码的形式可表示为
dij={1任务情景自主实现0任务情景非自主实现 (1)
式中: dij为i等级下的各任务情景j的状态, 其中i∈{1, 2, 3, 4}。
表 9 自主船舶任务情景Table 9. Task scenarios of autonomous ships航行 货物装卸和积载 维护和修理 应急操作和应急处置 自主导航 自主装卸 无线电/网络通信自主保持 设备和系统发生故障时的自主应急操作 自主保持船舶姿态 自主操纵 开敞水域 受限水域 软件自主维护 港口水域 避台操纵 靠离泊 自主避碰 两船避碰 不包括渔船、失控船和受限船 自主积载 硬件自主维护 发生海上事故时的自主应急处置 仅包括充分配备AIS等船载设备的渔船、失控船和受限船 包括未充分配备AIS等船载设备的渔船、失控船和受限船 软件自主维修 多船避碰 不包括渔船、失控船和受限船 仅包括充分配备AIS等船载设备的渔船、失控船和受限船 包括未充分配备AIS等船载设备的渔船、失控船和受限船 硬件自主维修 避免不协调的避碰行动 背离规则的避碰行动 以任务情景状态为输入, 构建自主水平标定方程, 计算结果对应不同的自主水平, 即
F=4∑i=1∏dij (2)QALΝΡ={ΜF=0ΡF=1ΙF=2AF=3FAF=4 (3)
表 10 任务情景等级划分Table 10. Classification for levels of task scenariosdij 1 2 3 4 5 6 7 1 自主导航 自主操纵(开敞水域) 自主避碰(两船避碰, 不包括渔船、失控船和受限船) 无线电/网络通信自主保持 软件自主维护 2 自主保持船舶姿态 自主操纵(受限水域) 自主操纵(港口水域) 自主避碰(两船避碰, 仅包括充分配备AIS等船载设备的渔船、失控船和受限船) 自主避碰(多船避碰, 不包括渔船、失控船和受限船) 自主积载 硬件自主维护 3 自主操纵(避台操纵) 自主操纵(靠离泊) 自主避碰(两船避碰, 包括未充分配备AIS等船载设备的渔船、失控船和受限船) 自主避碰(多船避碰, 仅包括充分配备AIS等船载设备的渔船、失控船和受限船) 自主装卸 软件自主维修 4 避免不协调的避碰行动 背离规则的避碰行动 自主避碰(多船避碰, 包括未充分配备AIS等船载设备的渔船、失控船和受限船) 硬件自主维修 设备和系统发生故障时的自主应急操作 发生海上事故时的自主应急处置 式中: F为自主水平标定方程的标定结果; QALNP为基于航海实践的自主水平分级方法的分级结果。
该方法依托任务情景将自主船舶的自主能力逻辑化, 根据自主水平标定方程计算自主船舶的自主水平, 同时, 本文提出的分级标准符合自主船舶的各个发展阶段, 且相互对应, 具有一定的合理性, 两者关系见图 5。
 图 5 ALNP分级标准与自主船舶发展路线的关系Figure 5. Relationship between taxonomy by ALNP and development route of autonomous ships
图 5 ALNP分级标准与自主船舶发展路线的关系Figure 5. Relationship between taxonomy by ALNP and development route of autonomous ships6. 实例分析
自主船舶在2018年得以迅猛发展, 有两项令世界瞩目的自主航行技术成功通过测试。本文根据提出的基于航海实践的自主水平分级方法分别对搭载自主航行技术的测试船舶进行实例分析, 并将分析结果与其他分级标准进行比对。
2018年4月, Wärtsilä公司成功对挪威制造商Norled旗下的83 m的“Folgefonn”号渡轮进行了全球首例的自动靠离泊试验, 如图 6所示。根据官方公布的技术信息, 该测试船搭载岸到岸自动靠离泊系统, 在船舶靠泊时, 该系统在距离泊位约2 km处被激活, 根据周边环境信息逐渐降低船速, 直至船舶停靠在泊位上; 离泊时, 系统可以以相同的程序完成操作。在已公布的技术说明和演示视频中, 靠离泊可实现由系统完全自主操作, 无需人为干预, 但在测试过程中仍有驾驶员在船, 用以确保在紧急情况发生时可以随时进行人为干预和控制。
2018年12月, Rolls-Royce公司与芬兰渡轮运营商Finferries在芬兰成功展示了世界第一艘完全自主驾驶渡轮“Falco”号(图 7)。该船依托“更安全的自主航行船舶(Safer Vessel with Autonomous Navigation, SVAN)”项目, 并应用了AAWA项目的最新研究成果, 截至测试时, 已完成约400 h的试验。该船是一艘53.8 m的双头汽车渡船, 搭载Rolls-Royce公司最新的船舶智能技术组合和双全回转推进器, 并配备了大量的传感器, 利用传感器融合和人工智能检测障碍物并完成避碰行动。根据官方公布的技术信息显示, “Falco”号可以实时、准确地绘制船舶航行过程中周围环境的详细图像, 并具有超出人眼的精确度。通过传感器的数据融合创建态势感知图像, 将其传输到Finferries公司的SCC。在SCC中, 由船长监督船舶的自主航行, 并在必要时介入进行人工干预。此外, “Falco”号自主航行系统中的自动靠离泊功能也在此次试验中被成功的展示。
6.1 “Folgefonn”号渡轮自主水平分级
根据已公布的技术信息, 并比对任务情景表, “Folgefonn”号渡轮可自主实现的任务情景仅有4项, 包括自主导航、无线电/网络通信自主保持、软件自主维护、自主保持船舶姿态。其中, 等级i=1为3项, 等级i=2为1项, 等级i=3为0项, 等级i=4为0项。可以得到, 自主水平标定方程F=0, 即“Folgefonn”号渡轮的自主水平为M级, 船舶由船员手动控制船舶, 船载辅助决策系统或岸基支持系统可提供决策支持或有限的自动控制, 船舶无自主能力。该渡轮的航行测试仅展示了自动靠离泊功能, 航行过程仍主要依靠在船驾驶员制定决策和实施操纵行为, 因此, ALNP分级结果与官方披露的客观事实一致。根据自主水平的划分标准, ALNP与其他分级标准的分级结果对比如表 11所示, 其中, ALNP、DMA、IMO分级标准均将其自主水平描述为M级, LR分级标准将其描述为AL3级。
需要注意的是, 由官方披露的技术信息和文字表述显示, “Folgefonn”号渡轮已能实现的是自动靠离泊, 其功能实现仍依靠预设的决策和控制程序完成, 虽然在靠离泊过程中无需人的控制, 但需要人在预设的位置手动启动自动靠离泊程序。因此, 不能认定等级i=3的自主靠离泊的实现。
在LR分级标准中, AL2级被描述为“由在船驾驶员执行所有的船舶级操作”, 而“Folgefonn”号渡轮已能实现自动靠离泊, 靠离泊过程已无需在船驾驶员执行, 即其自主水平不符合AL2级的描述和要求, 因此只能将其标定为AL3级。然而, 由于LR分级标准是针对船舶整体自主水平进行的描述, “Folgefonn”号渡轮仅就靠离泊实现了自动操作, 其船舶整体自主水平远未达到AL3级的要求, 不能客观反映其自主水平的真实情况。
根据上述分析表明, 目前的分级标准均以船舶整体自主水平进行概括性描述, 难以对已实现单一功能自主化, 而整体自主水平仍较低的船舶进行准确的自主水平划分, 存在一定的局限性。
表 11 “Folgefonn”号自主水平分级结果Table 11. Classification results for autonomy level of Folgefonn Ferry方法 ALNP LR NFAS DMA MASRWG BV IMO 分级结果 M AL3 自动化驾驶台 M 0 2 M 6.2 “Falco”号渡轮自主水平分级
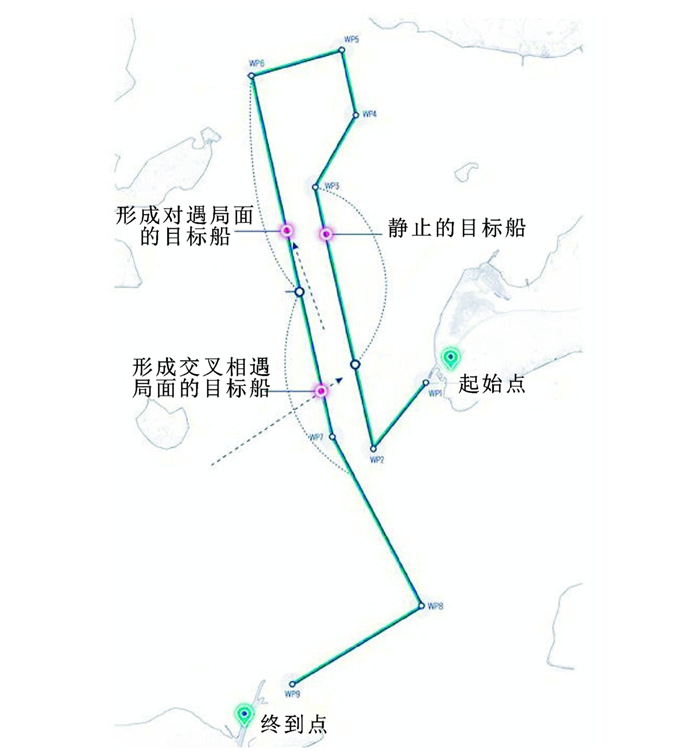
根据已公布的技术信息, “Falco”号渡轮详细的航行路线如图 8所示。航程1为完全自主航行模式, 航程2(返航)为远程控制模式, 本文以航程1为研究对象, 全程途经9个转向点(Way Point, WP), 即WP1~WP9, 需要对航行过程中会遇的3个目标船采取恰当的避碰行动, 分别为静止的目标船、形成对遇局面的目标船和形成交叉相遇局面的目标船。基于上述信息, “Falco”号渡轮可自主实现的任务情景有8项, 包括自主导航、自主操纵(开敞水域)、自主避碰(两船避碰, 不包括渔船、失控船和受限船)、无线电/网络通信自主保持、软件自主维护、自主保持船舶姿态、自主操纵(受限水域)、自主操纵(港口水域), 其中, 等级i=1有5项, 等级i=2有3项, 等级i=3有0项, 等级i=4有0项。可以得到, 自主水平标定方程F=1, 即“Falco”号渡轮的自主水平为P级, 船舶仅能自主完成比较简单的特定任务情景, 且由船员(在船)或岸基控制人员监督执行, 必要时可以请求人工干预; 高自主等级任务情景由船员或岸基控制人员直接控制或授权执行。在试验展示中, “Falco”号渡轮的航行水域为港口水域, 且仅能够实现两船(不包括渔船、失控船和受限船)的自主避碰, 船载设备的自主维护和发生故障时的应急操作均未得到演示, 为谨慎起见, 暂视为不可自主实现, 因此, ALNP分级结果与官方披露的客观事实一致。根据自主水平的划分标准, ALNP与其他分级标准的分级结果对比如表 12所示。
表 12 “Falco”号渡轮自主水平分级结果Table 12. Classification results for autonomy level of Falco Ferry方法 ALNP LR NFAS DMA MASRWG BV IMO 分级结果 P AL4 受限自主 A 5 3 A 虽然Rolls-Royce公司宣称“Falco”号渡轮为世界上第一艘完全自主航行船舶, 但由于技术细节披露有限, 例如多船避碰、避碰会遇两船的不协调行动、背离规则的避碰行动、设备故障自主维修、发生海上事故时的应急处置等诸多任务情景未能进行展示和说明, 且在航行过程中自主航行系统仍需要人的监督执行, 必要时仍需要人工干预以保障船舶航行安全, 因此, 该船的实际自主水平远未达到完全自主, 若投入实际运营, 在确保船舶航行安全的前提下, 仍将处于岸基远程控制阶段。
在分级结果的比对分析中, LR和NFAS分级标准仍显示出一定的合理性和先进性, 而DMA、MASRWG、BV和IMO分级标准由于较单一地依据船舶自动化水平或决策地点, 导致自主水平的分级结果与客观事实存在较大的差距, 其科学性有待检验。
通过对“Folgefonn”号渡轮和“Falco”号渡轮的实例分析和分级结果的初步对比, 验证了基于航海实践的自主水平分级方法的科学性和合理性。以特定任务情景为评价指标, 比较客观地反映了自主船舶的自主水平, 在一定程度上避免了由于单一功能或少数几个任务情景的自主实现所产生的对自主水平认定过高的弊端, 有利于保障自主船舶的健康发展和航行安全。
7. 结语
(1) 明确了自主船舶的定义, 规范了自主船舶的中英文表述, 讨论了船舶自主化演变路径, 分析了现有自主水平分级标准的分级依据, 认为划分自主水平的关键在于能否独立于人的干预完成相应的任务或实现相应的功能。
(2) 提出了基于航海实践的自主水平分级方法, 在一定程度上规避了现有分级标准的局限性, 解决了由于单一功能的自主实现造成船舶整体自主水平认定过高的问题, 回答了航海领域专家学者和船舶驾驶人员的关切。
(3) 以2艘搭载自主航行技术的测试船舶为例, 对提出的方法进行了验证, 结果表明该方法的分级结果更符合客观事实, 科学性得以检验。同时, 研究结论可为有关部门向IMO递交关于自主船舶的提案提供参考。
(4) 未来将进一步细化自主船舶任务情景, 特别是对于复杂任务的等级划分。同时, 从航海实践的角度出发, 讨论并解决自主船舶适用《1972年国际海上避碰规则》时可能存在的适用障碍和约束。
-

图 2 LR与DMA自主水平分级标准的关系
Figure 2. Relationship between LR and DMA of autonomy level taxonomy

图 5 ALNP分级标准与自主船舶发展路线的关系
Figure 5. Relationship between taxonomy by ALNP and development route of autonomous ships
表 1 自主船舶的定义
Table 1. Definitions of autonomous ship
出处 时间 英文原文 中文译文 MUNIN[10] 2012年 Next generation modular control systems and communications technology will enable wireless monitoring and control functions both on and offboard. These will include advanced decision support systems to provide a capability to operate ships remotely under semi or fully autonomous control. 下一代模块化控制系统和通信技术在船载或船外将实现无线监控和控制功能, 包括先进的决策系统以提供在半自主或全自主控制下远程操纵船舶的能力。 Bertram[2] 2016年 An autonomous ship is a ship that “has systems based on automated software that may advice human operators, or at the highest level of autonomy replace human decision making and action”. 自主船舶是指“具有基于自动化软件的系统, 可以向操作人员提供建议或在最高自主等级中取代人的制定决策和采取行动”的船舶。 ABS[20] 2016年 Marine vessel with sensors, automated navigation, propulsion and auxiliary systems, with the decision logic to follow mission plans, sense the environment, adjust mission execution for the environment, and operate without human intervention. 配备传感器、自动导航、推进和辅助系统的船舶, 并具备遵循任务计划、感知环境、根据环境调整任务执行且无需人为干预的决策逻辑。 NFAS[21] 2017年 An autonomous ship is a ship, that has some level of automation and self-governance. 自主船舶是具有一定自动化和自治等级的船舶。 BV[22] 2017年 Ship having the same capabilities as those of a smart ship and including autonomous systems capable of making decisions and performing actions with or without human in the loop. An autonomous ship may be manned with a reduced crew or unmanned with or without supervision. 自主船舶具有与智能船舶相同的能力, 并且包括在有人或无人的情况下能够制定决策并执行行动的自主系统。自主船舶可以实现减少船员配备、无人驾驶或无人监督。 DMA[23] 2017年 Ships capable of providing—via automatic processes—decision-support or a possibility of taking over parts of or the entire human control and management of the ship, irrespective of whether the control is exerted from the ship or from somewhere else. 通过自动过程能够提供决策支持或可能接管的由部分或全部人员控制和管理的船舶, 而不论是从船上还是其他地方施加控制。 IMO 2018年 Maritime autonomous surface ship (MASS) is defined as a ship which, to a varying degree, can operate independent of human interaction. 海上自主水面船舶被定义为在不同程度下, 可以独立于人的干预的船舶。  下载: 导出CSV
下载: 导出CSV
表 2 LR自主水平分级标准
Table 2. Taxonomy of autonomy levels by LR
自主水平 描述 AL0 手动(无自主功能): 所有行动和决策均由手动执行, 即船员控制船舶所有行动。 AL1 船载决策支持: 控制人员执行所有在船操作, 但决策支持工具可以提供选项或以其他方式影响其选择的操作。 AL2 船载或岸基决策支持: 控制人员执行所有在船操作, 但决策支持工具可以提供选项或以其他方式影响其选择的操作; 数据可以由船上或船外的系统提供。 AL3 控制人员监督和授权执行: 由控制人员监督在船决策和行动的自主执行, 控制人员有权对高影响力决策进行干预; 数据可以由船上或船外的系统提供。 AL4 控制人员监督执行并有权干预: 由控制人员监督所有决策和行动的自主执行; 控制人员有权对高影响力决策进行干预。 AL5 受监督的自主: 由系统制定的决策和采取的行动很少受到监督或无监督。 AL6 完全自主: 由系统制定的决策和采取的行动不会受到监督。
下载: 导出CSV
表 3 NFAS自主船舶分类
Table 3. Classification of autonomous ships by NFAS
类别 描述 AAB 船舶手动驾驶, 船员可以立即干预正在进行的活动。 PUB 驾驶台无船员, 但船舶仅能在开阔水域或良好天气的情况下有限的时间运行; 船员在船, 遇到问题时可随时前往驾驶台。 PUS 驾驶台无船员, 船舶可长时间运行, 如在深水航道航行, 或在进港、离港阶段, 由登船队登船或护卫船抵进以控制船舶。 CUS 船舶专为全天候无人驾驶设计, 除非处于紧急情况, 否则船上无人被授权控制船舶。(注: 此阶段仍有可能有人在船, 如乘客或维修人员)
下载: 导出CSV
表 4 NFAS操作自主水平分级标准
Table 4. Taxonomy of operational autonomy levels by NFAS
操作自主水平 描述 决策支持 船员直接控制船舶操作, 并持续监督所有操作, 无自主功能。 自动化 船舶具有更先进自动化系统, 无需人工干预即可完成某些预定操作, 如动力定位或自动靠离泊。自动操作遵循预编程序执行, 发生任何意外事件或事件已完成将请求人工干预。船员或岸基控制中心(Shore Control Centre, SCC)可随时直接或远程控制。 受限自主 船舶在大多数情景可自主运行, 解决预定义选项的常见问题, 如避碰等。如果在限制范围内无法自主执行, 系统会请求人工干预。船员或SCC将保持持续监督, 并在系统请求时立即介入。 完全自主 船舶自主处理所有情景, 将不存在船员和SCC。
下载: 导出CSV
表 5 NFAS自主水平分级标准
Table 5. Taxonomy of autonomy levels by NFAS
自主水平 有人驾驶台 无人驾驶台(有船员在船) 无人驾驶台(无船员在船) AAB/PUB PUB PUS/CUS 决策支持 直接控制(无自主) 远程控制 远程控制 自动化 自动化驾驶台 自动化船舶 自动化控制 受限自主 受限自主 受限自主 完全自主 完全自主
下载: 导出CSV
表 6 DMA自主水平分级标准
Table 6. Taxonomy of autonomy levels by DMA
自主等级 描述 M 配备自动系统和辅助决策的手动操纵船舶 R 有船员在船的远程控制船舶 RU 无船员在船的远程控制船舶 A 完全自主船舶
下载: 导出CSV
表 7 MASRWG自主水平分级标准
Table 7. Taxonomy of autonomy levels by MASRWG
自主等级 描述 0 载人: 船舶由船上操作人员控制。 1 操作: 在操作控制下, 操作人员控制所有认知功能。操作人员通过无线电或电缆与无人驾驶船舶直接相连, 并制定所有决策, 指导和控制所有任务功能。 2 决策: 在直接控制下, 无人驾驶船舶具有一定程度的推理和响应能力。系统可以感知环境、报告船舶状态, 并向操作人员提供行动建议, 但由操作人员授权决策。无人驾驶船舶仅能在命令或允许的情况下采取行动。 3 委托: 无人驾驶船舶被授权执行某些功能。系统可以感知环境、报告船舶状态、定义行动和报告意图。在一定时间内, 操作人员可以否决系统的意图, 否则船舶将采取相应的行动。无人驾驶船舶具有自主决策的能力, 并与操作人员共享决策。 4 监控: 无人驾驶船舶将感知环境、报告状态、制定决策、采取行动和报告行动, 操作人员可以对事件进行监控。 5 自主: 无人驾驶船舶将感知环境、报告状态、制定决策、采取行动, 并在系统能力和限制的范围内提供最大程度的独立性和自我判断。船载系统在由其确定的情况下调用自主功能, 而无需通知其他的外部单位或操作人员。
下载: 导出CSV
表 8 BV自主水平分级标准
Table 8. Taxonomy of autonomy levels by BV
自主等级 描述 0 人工操作: 人工制定所有决策和控制所有功能。 1 人工决策: 系统提供决策支持, 人工制定决策并采取行动。 2 人工授权: 系统决策, 但需要人工授权执行。在一定时间内, 可以进行人工干预。 3 人工监督: 系统无需等待人工授权即可决策、执行。但人员会被告知系统的决策和行动。 4 完全自主: 系统无需通知控制人员即可进行决策、执行。仅在紧急情况下才会通知人员。
下载: 导出CSV
表 9 自主船舶任务情景
Table 9. Task scenarios of autonomous ships
航行 货物装卸和积载 维护和修理 应急操作和应急处置 自主导航 自主装卸 无线电/网络通信自主保持 设备和系统发生故障时的自主应急操作 自主保持船舶姿态 自主操纵 开敞水域 受限水域 软件自主维护 港口水域 避台操纵 靠离泊 自主避碰 两船避碰 不包括渔船、失控船和受限船 自主积载 硬件自主维护 发生海上事故时的自主应急处置 仅包括充分配备AIS等船载设备的渔船、失控船和受限船 包括未充分配备AIS等船载设备的渔船、失控船和受限船 软件自主维修 多船避碰 不包括渔船、失控船和受限船 仅包括充分配备AIS等船载设备的渔船、失控船和受限船 包括未充分配备AIS等船载设备的渔船、失控船和受限船 硬件自主维修 避免不协调的避碰行动 背离规则的避碰行动
下载: 导出CSV
表 10 任务情景等级划分
Table 10. Classification for levels of task scenarios
dij 1 2 3 4 5 6 7 1 自主导航 自主操纵(开敞水域) 自主避碰(两船避碰, 不包括渔船、失控船和受限船) 无线电/网络通信自主保持 软件自主维护 2 自主保持船舶姿态 自主操纵(受限水域) 自主操纵(港口水域) 自主避碰(两船避碰, 仅包括充分配备AIS等船载设备的渔船、失控船和受限船) 自主避碰(多船避碰, 不包括渔船、失控船和受限船) 自主积载 硬件自主维护 3 自主操纵(避台操纵) 自主操纵(靠离泊) 自主避碰(两船避碰, 包括未充分配备AIS等船载设备的渔船、失控船和受限船) 自主避碰(多船避碰, 仅包括充分配备AIS等船载设备的渔船、失控船和受限船) 自主装卸 软件自主维修 4 避免不协调的避碰行动 背离规则的避碰行动 自主避碰(多船避碰, 包括未充分配备AIS等船载设备的渔船、失控船和受限船) 硬件自主维修 设备和系统发生故障时的自主应急操作 发生海上事故时的自主应急处置
下载: 导出CSV
表 11 “Folgefonn”号自主水平分级结果
Table 11. Classification results for autonomy level of Folgefonn Ferry
方法 ALNP LR NFAS DMA MASRWG BV IMO 分级结果 M AL3 自动化驾驶台 M 0 2 M
下载: 导出CSV
表 12 “Falco”号渡轮自主水平分级结果
Table 12. Classification results for autonomy level of Falco Ferry
方法 ALNP LR NFAS DMA MASRWG BV IMO 分级结果 P AL4 受限自主 A 5 3 A
下载: 导出CSV
-
[1] WRÓBEL K, MONTEWKA J, KUJALA P. Towards the assessment of potential impact of unmanned vessels on maritime transportation safety[J]. Reliability Engineering and System Safety, 2017, 165: 155-169. doi: 10.1016/j.ress.2017.03.029 [2] BERTRAM V. Autonomous ship technology-smart for sure, unmanned maybe[C]∥The Royal Institution of Naval Architects. RINA International Conference on Smart Ship Technology. London: The Royal Institution of Naval Architects, 2016: 13-16. [3] CAMPBELL S, NAEEM W, IRWIN G W. A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres[J]. Annual Reviews in Control, 2012, 36(2): 267-283. doi: 10.1016/j.arcontrol.2012.09.008 [4] BERTRAM V. Unmanned surface vehicles—a survey[J]. Skibsteknisk Selskab, 2008, 1: 1-14. [5] MANLEY J E. Unmanned surface vehicles, 15 years of development[C]//IEEE. OCEANS 2008. New York: IEEE, 2008: 1-4. [6] LIU Zhi-xiang, ZHANG You-min, YU Xiang, et al. Unmanned surface vehicles: an overview of developments and challenges[J]. Annual Reviews in Control, 2016, 41: 71-93. doi: 10.1016/j.arcontrol.2016.04.018 [7] 侯馨光. 21世纪船舶自动化展望[J]. 上海造船, 1997(2): 38-41. https://www.cnki.com.cn/Article/CJFDTOTAL-SHZC199702008.htmHOU Xin-guang. An outlook on marine automation in the 21st century[J]. Shanghai Shipbuilding, 1997(2): 38-41. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-SHZC199702008.htm [8] 郭廷结. 国外船舶自动化技术概述[J]. 国外自动化, 1980(4): 24-30, 60. https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR198004005.htmGUO Ting-jie. Overview of automation technology towards foreign ships[J]. Automation Abroad, 1980(4): 24-30, 60. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR198004005.htm [9] 严新平. 智能船舶的研究现状与发展趋势[J]. 交通与港航, 2016(1): 25-28. https://www.cnki.com.cn/Article/CJFDTOTAL-CSGS201601008.htmYAN Xin-ping. Research status and development trends of intelligent ships[J]. Communication and Shipping, 2016(1): 25-28. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-CSGS201601008.htm [10] BURMEISTER H C, BRUHN W, R∅DSETH ∅ J, et al. Autonomous unmanned merchant vessel and its contribution towards the e-Navigation implementation: the MUNIN perspective[J]. International Journal of e-Navigation and Maritime Economy, 2014, 1: 1-13. doi: 10.1016/j.enavi.2014.12.002 [11] Rolls-Royce. Remote and autonomous ships—the next steps[R]. London: Rolls-Royce, 2016. [12] 吴兆麟. 船舶驾驶自动化与航海智能化[J]. 中国海事, 2017(8): 16-19. https://www.cnki.com.cn/Article/CJFDTOTAL-HSZG201708010.htmWU Zhao-lin. Ship driving automation and navigation intelligence[J]. China Maritime Safety, 2017(8): 16-19. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HSZG201708010.htm [13] Maritime Safety Committee. Report of the Maritime Safety Committee on its ninety-eighth session[R]. London: IMO, 2017. [14] Maritime Safety Committee. Final report: analysis of regulatory barriers to the use of autonomous ships submitted by Denmark[R]. London: IMO, 2018. [15] Maritime Safety Committee. Report of the Maritime Safety Committee on its ninety-ninth session[R]. London: IMO, 2018. [16] Maritime Safety Committee. Report of the Maritime Safety Committee on its one hundredth session[R]. London: IMO, 2019. [17] Maritime Safety Committee. Report of the Maritime Safety Committee on its one hundredth session(annexes 1-16)[R]. London: IMO, 2019. [18] Lloyd's Register. Maritime Safety Committee one hundred and first session (MSC 101) summary report[R]. London: Lloyd's Register, 2019. [19] Bureau Veritas. Major outcomes of the 101st session of the maritime safety committee[R]. Paris: Bureau Veritas, 2019. [20] JORGENSEN J. Autonomous vessels: ABS' classification perspective[R]. Spring: American Bureau of Shipping, 2016. [21] R∅DSETH ∅ J, NORDAHL H. Definitions for autonomous merchant ships[R]. Trondheim: Norwegian Forum for Autonomous Ships, 2017. [22] Bureau Veritas. Guidelines for autonomous shipping[R]. Paris: Bureau Veritas, 2017. [23] Danish Maritime Authority. Analysis of regulatory barriers to the use of autonomous ships[R]. Kors⌀r: Danish Maritime Authority, 2017. [24] R∅DSETH ∅ J. From concept to reality: unmanned merchant ship research in Norway[C]//IEEE. 2017 IEEE OES International Symposium on Underwater Technology. New York: IEEE, 2017: 1-10. [25] R∅DSETH ∅ J, NORDAHL H, HOEM Å. Characterization of Autonomy in Merchant Ships[C]//IEEE. 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans. New York: IEEE, 2018: 1-7. [26] Lloyd's Register. Cyber-enabled ships shipright procedure—autonomous ships[R]. London: Lloyd's Register, 2016. [27] WRÓBEL K, MONTEWKA J, KUJALA P. Towards the development of a system-theoretic model for safety assessment of autonomous merchant vessels[J]. Reliability Engineering and System Safety, 2018, 178: 209-224. [28] WRÓBEL K, MONTEWKA J, KUJALA P. System-theoretic approach to safety of remotely-controlled merchant vessel[J]. Ocean Engineering, 2018, 152: 334-345. [29] Lloyd's Register. LR code for unmanned marine systems[R]. London: Lloyd's Register, 2017. [30] MASRWG. Maritime autonomous surface ships UK code of practice[R]. Southampton: MASRWG, 2017. [31] 戴厚兴, 吴兆麟. 能见度不良天气下海上交通安全风险预警系统[J]. 交通运输工程学报, 2018, 18(5): 195-206. http://transport.chd.edu.cn/article/id/201805019DAI Hou-xing, WU Zhao-lin. Pre-warning system of maritime traffic safety risk in restricted visibility weather[J]. Journal of Traffic and Transportation Engineering, 2018, 18(5): 195-206. (in Chinese). http://transport.chd.edu.cn/article/id/201805019 [32] VAGIA M, TRANSETH A A, FJERDINGEN S A. A literature review on the levels of automation during the years. What are the different taxonomies that have been proposed?[J]. Applied Ergonomics, 2016, 53: 190-202. [33] ZHOU Xiang-yu, LIU Zheng-jiang, WU Zhao-lin, et al. Quantitative processing of situation awareness for autonomous ships navigation[J]. The International Journal on Marine Navigation and Safety of Sea Transportation, 2019, 13(1): 25-31. [34] PORATHE T, HOEM Å, R∅DSETH ∅ J, et al. At least as safe as manned shipping?Autonomous shipping, safety and "human error"[C]//HAUGEN S, BARROS A, VAN GULIJK C, et al. Safety and Reliability—Safe Societies in a Changing World. London: CRC Press, 2018: 417-425. 期刊类型引用(21)
1. 陈立家,王凯,黄立文,李胜为,周欣蔚,刘岩值. 船舶自主航行虚拟测试场景研究进展. 中国舰船研究. 2025(01): 25-37 .  百度学术
百度学术2. 索双武,刘学良,李永杰,陶佳伟,张富榕. 船员异常行为识别与分析方法策略及应用. 珠江水运. 2024(09): 99-103 . 百度学术3. 席永涛,刘鹏杰,胡甚平,韩冰. 基于STPA和FTPN的海上自主水面船舶航行实时风险评估. 中国安全科学学报. 2024(08): 18-26 . 百度学术4. 李晨,严新平,刘佳仑,汤敏,陈光霖,林楠. 船舶远程驾驶控制系统设计与应用. 交通运输工程学报. 2024(05): 333-347 .  本站查看
本站查看5. 梁超. VTS应对智能船舶发展举措探究. 中国海事. 2023(01): 41-43 . 百度学术6. 周健,李徽,郭帅超,王晨旭. 船舶领域理论:发展现状及其MASS时代机遇. 科技导报. 2023(05): 78-90 . 百度学术7. 周健,李徽,王宝宝,周莹. 无人船时代船舶安全风险因素的转变. 船舶工程. 2023(04): 40-43 . 百度学术8. 张茜,白旭,张海华,杨立,李永正,张胜. 基于组合权重的自主船舶靠、离泊功能评价方法. 中国造船. 2023(04): 127-139 . 百度学术9. 陈秭锟. 无人船运输的转承责任研究——兼论《海商法》的修改. 北京理工大学学报(社会科学版). 2023(06): 106-117 . 百度学术10. 章文俊 ,牟聪瑞 ,杨雪 ,周翔宇 ,孟祥坤 ,李连博 ,白伟伟 . 基于自主船舶规范的控制权切换机制. 大连海事大学学报. 2023(04): 1-12 . 百度学术11. 陈信强,郑金彪,凌峻,王梓创,吴建军,阎莹. 基于异步交互聚合网络的港船作业区域人员异常行为识别. 交通信息与安全. 2022(02): 22-29 . 百度学术12. 白响恩,李博翰,徐笑锋,肖英杰. 无人船研究现状及内部构造展望(英文). Journal of Marine Science and Application. 2022(02): 47-58 . 百度学术13. 张浦哲,吴兵,严新平,叶子良. 内河船舶远程驾驶控制系统安全分析. 中国安全科学学报. 2022(08): 126-132 . 百度学术14. 周颖,刘正江,王新建,谢辉. 自主船舶避碰过程中人为失误的分析与评估. 大连海事大学学报. 2022(03): 12-19 . 百度学术15. 严新平,贺亚鹏,贺宜,范爱龙,刘佳仑,张笛. 水路交通技术发展趋势. 交通运输工程学报. 2022(04): 1-9 . 本站查看16. 柳晨光,贺治卜,初秀民,吴文祥,李松龙,谢朔. 船舶编队控制综述. 交通运输工程学报. 2022(04): 10-27 . 本站查看17. 周翔宇,杨雪,费珊珊. 船舶自主化与自主水平划分标准评述. 世界海运. 2022(09): 1-10 . 百度学术18. 朱曼,文元桥,孙吴强,张家辉,Axel HAHN. 船舶运动模型参数辨识研究综述. 交通信息与安全. 2022(05): 1-11+155 . 百度学术19. 吴文祥,初秀民,柳晨光,毛文刚. 基于模型预测控制的船舶纵向航速协同控制方法. 交通信息与安全. 2021(01): 52-63 . 百度学术20. 田国昊,谢磊,祝添权,初秀民,郑茂. 内河复杂航段船舶会遇场景及交通流特征分析. 武汉理工大学学报. 2021(11): 27-34 . 百度学术21. 张宝晨,于巧婵,徐加庆,佟宝琳,魏长庚. 浅析船舶智能航行驾驶模式与对外信息交互协同. 中国航海. 2021(04): 125-129 . 百度学术其他类型引用(19)
-

 下载:
下载:







 百度学术
百度学术 点击查看大图
点击查看大图

计量
- 文章访问数: 1910
- HTML全文浏览量: 323
- PDF下载量: 638
- 被引次数: 40
