| Citation: | CHEN Jun-jie, CAI Bo-gen, SHANGGUAN Wei, WANG Jian, CHAI Lin-guo. Slot control optimization of intelligent platoon for dual-lane two-way overtaking behavior[J]. Journal of Traffic and Transportation Engineering, 2019, 19(2): 178-190. doi: 10.19818/j.cnki.1671-1637.2019.02.016

|
Overtaking and lane changing can improve road utilization to a certain extent. In response to the basic information of vehicle interaction provided by the future vehicle road collaborative environment, Li Xun et al. proposed a collaborative lane changing model that considers local area vehicle state optimization[14]Milan é s et al. developed a fuzzy logic based controller that simulates the overtaking process by inputting information from a location-based system consisting of visual systems, global positioning systems, and inertial measurement units, and outputting actions on vehicle actuators such as the steering wheel, accelerator, and brake pedal[15].
At present, research on overtaking behavior of vehicles mainly focuses on overtaking vehicles and overtaking fleets composed of multiple vehicles without vehicle to vehicle communication[16, 17, 18]For vehicle overtaking, there is vehicle to vehicle communication[19]However, there is little research on the swarm intelligence fleet, and some scholars have studied the necessary message response methods for bicycles to surpass the fleet in an ideal state[20, 21, 22, 23]However, there has been no research on the control of the distance between vehicles within the convoy during overtaking and the restrictions on overtaking vehicles returning to their original lane. In fact, when overtaking a convoy in a two-way two lane road, if the driver misjudges the distance to the oncoming vehicle and the length of the convoy, the vehicle is easily trapped in a dangerous area where it cannot complete overtaking or return to the original lane[24, 25, 26]Causing the overtaking vehicle to be forced to make an emergency stop or collide with the oncoming vehicle, or the overtaking vehicle to forcefully merge into the original lane convoy, resulting in a collision with the convoy vehicles. At the same time, two-way two lane highways such as the Qinghai Tibet Highway, which are responsible for the main transportation of materials, have the characteristics of long queues, multiple queues, and fast driving speeds for large vehicles traveling in groups[27, 28, 29]The overtaking defects of the above-mentioned vehicles on the transportation fleet will be more pronounced.
This article establishes a kinematic model for a single vehicle overtaking convoy, theoretically analyzing and demonstrating the existence of a dangerous area where vehicles face the dilemma of "overtaking giving up" when overtaking on a two-way two vehicle road section. The influencing factors of the dangerous area are determined through the model; Studied the relationship between the speed of overtaking vehicles and the safety clearance of the convoy when completing overtaking actions or giving up overtaking and returning to the original lane; Finally, a bidirectional two lane stepwise Single Vehicle Overtaking Platoon (SVOP) algorithm based on dynamic safety clearance was proposed, and a hierarchical constrained multi-objective optimization method based on improved particle swarm optimization was designed to provide a multi-objective optimization scheme for the three-level speed guidance of overtaking vehicles and vehicles in front and behind the safety clearance in the stepwise overtaking algorithm, including mileage, number of overtaking vehicles, and comfort.
In a two-way two vehicle road section, when an overtaking vehicle occupies the opposite lane for overtaking, if the distance between adjacent vehicles in the overtaking fleet is not sufficient to meet the overtaking requirements of the overtaking vehicle, a vehicle appears in the opposite lane, causing the line of sight to be less than the safe overtaking line of sight requirement. The overtaking vehicle often falls into the danger zone of overtaking, where it cannot overtake or return to the original lane.
Here we define the critical position and critical time for overtaking vehicles. Assuming that there is always a chance to give up overtaking and safely return to the original lane before the overtaking vehicle enters the overtaking lane and reaches the critical position, and when the overtaking vehicle crosses the critical position point on the overtaking lane, it enters the overtaking danger zone; The critical time is the time when a overtaking vehicle reaches the critical position from the start of overtaking.
The conditions for safely completing the overtaking maneuver are: avoiding collision between the overtaking vehicle and the oncoming vehicle; The necessary safety distance should be maintained between the overtaking vehicle and the leading vehicle of the overtaken convoy. Shan Xiaofeng and others provided detailed explanations on the conditions for safe overtaking[30]For the convenience of explaining the implementation of the SVOP algorithm, only a brief explanation is provided below
o≥(v0+v1)(t0+t1)+J1 (1)J1=(v0+v1)h1 (2)J2=v2h2 (3)J2+l1=v0(t0+t1)+J3- v2(t0+t1)-(Ν-1)v2h3 (4)
The line of sight conditions for safe overtaking are
o1≥(v0+v1){v2[h2+(Ν-1)h3]+l1-J3}v0-v2+(v0-v1)h1 (5)
In the formula:oFor the lower limit of safe driving sight distance;v0The speed of the overtaking vehicle after acceleration;v1To determine the speed of the oncoming vehicle for overtaking;v2For the speed of the fleet;t0For critical time;t1The remaining overtaking process time after the critical moment;J1The minimum safe distance between the overtaking vehicle and the oncoming vehicle at the end of overtaking;J2To complete overtaking, the distance between the rear of the overtaking vehicle and the front of the leading vehicle in the overtaking convoy;J3The distance between the front of the overtaking vehicle and the rear of the overtaking fleet after acceleration;h1doJ1The safe time interval;h2doJ2The safe time interval;h3To be overtaken by the front distance of the convoy;l1To overtake the driver;NNumber of vehicles in the fleet;o1For safe overtaking visibility.
The conditions for a overtaking vehicle to safely return to its original lane after giving up overtaking during the overtaking process are: the overtaking vehicle should maintain a certain safe distance from the oncoming vehicle and downstream vehicles when returning to its original lane, and at the same time, the speed of the overtaking vehicle should not be too low when decelerating and returning to its original lane to avoid obstructing the normal driving of vehicles behind. The condition is
J4=h4(v0-dt2)= v2(t0+t2)-l2-J3-v0t0-v0t2+dt222 (6) o2≥v0t0+v0t2-dt222+v1(t0+t2)+J5 (7) J5=(v0-dt2+v1)h1 (8)
The line of sight conditions that allow giving up overtaking are
o2≥(v2+v1+h4d)t2+(v2+v1)t0-l2-J3-h4v0+(v0-dt2+v1)h1 (9)
o=min{o1,o2} (10)
In the formula:J4The distance between the front of the overtaking vehicle and the rear of the convoy when returning to the original lane;h4doJ4The safe time interval;dReduce the speed of overtaking vehicles;t2The process time from giving up overtaking and slowing down to returning to the original lane;l2For the fleet leader;J5The minimum safe distance between returning to the original lane and the oncoming vehicle;o2To allow the abandonment of overtaking sight distance.
When the line of sight conditions are less than the safe overtaking and allowed to abandon overtaking line of sight, the vehicle is in a dangerous situation of overtaking and abandoning overtaking.
The danger zone for overtaking refers to the area from the front of the convoy to the critical position of the overtaking vehicle. For the purpose of analyzing the factors that affect the range of overtaking danger zones, it is assumed that when overtaking is completed, the distance between the rear of the overtaking vehicle and the front of the overtaking vehicle is 2 seconds; The headway between vehicles in the overtaking convoy is 3 seconds; All vehicles have a length of 5 meters; The safe time interval between the front of the overtaking vehicle and the rear of the downstream vehicle when returning to the original lane is 2 seconds; The speed of the oncoming vehicle when overtaking is 60 km/h-1The speed of the overtaking vehicle after acceleration during overtaking is 80 km/h-1The fleet speed is 60 km · h-1The distance between the front of the overtaking vehicle and the first downstream vehicle after acceleration is 20 meters; At the end of overtaking, the minimum safe distance between the overtaking vehicle and the oncoming vehicle is 3 seconds. The critical time obtained from equation (10)t0By substituting equations (7) and (9), the relationship between the overtaking danger zone and the number of vehicles in the overtaking convoy, as well as the speed of oncoming vehicles, can be obtainedFigure 1.


causeFigure 1It can be seen that the emergence of overtaking danger zones is not only related to the line of sight judgment at the beginning of overtaking, but also to the number of vehicles in the convoy and the speed of oncoming vehicles. The overtaking danger zone increases with the increase of the number of vehicles in the convoy and the speed of oncoming vehicles.
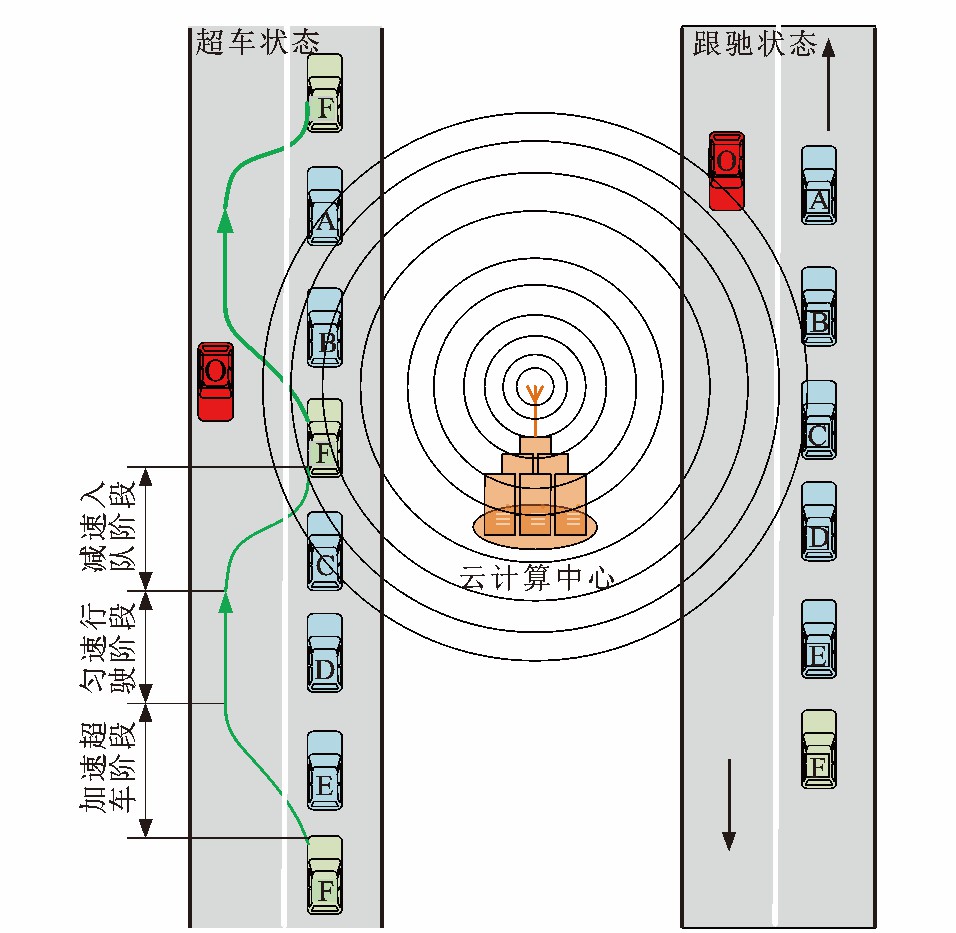
This paper proposes a "step-by-step" SVOP algorithm to address the overtaking abandonment dilemma faced by vehicles when overtaking a convoy in a two-way two lane road. SeeFigure 2, A~E are fleet vehicles; F is the overtaking vehicle; O is a vehicle traveling in the opposite lane. The cloud computing center is responsible for collecting vehicle information on road sections and calculating the optimal overtaking plan.
In a two-way two lane road, when overtaking vehicle F overtakes a convoy composed of vehicles A~E (there is no limit to the number of vehicles in the convoy), vehicle O comes from the opposite lane. To avoid overtaking vehicles entering the overtaking danger zone, the cloud computing center guides the overtaking vehicles and convoy vehicles in terms of speed. Vehicle F follows the speed guidance information provided by the cloud computing center to perform overtaking behavior. Vehicle B and its preceding convoy, vehicle C and its following convoy follow the speed guidance information provided by the cloud computing center to form a safe gap for vehicle F to enter the convoy (vehicles B and C are selected by the cloud computing center through calculation). Vehicle F first overtakes vehicles C~E in the convoy and enters the convoy. After the oncoming vehicle O passes by, vehicle F follows the speed guidance information provided by the cloud computing center to form a safe gap for vehicle F to enter the convoy (vehicles B and C are selected by The published speed guidance information drives and overtakes vehicles B and A, This is the overtaking goal that the step-by-step overtaking algorithm aims to achieve for the vehicle to the convoy.
In summary, the step-by-step overtaking algorithm process is as follows.
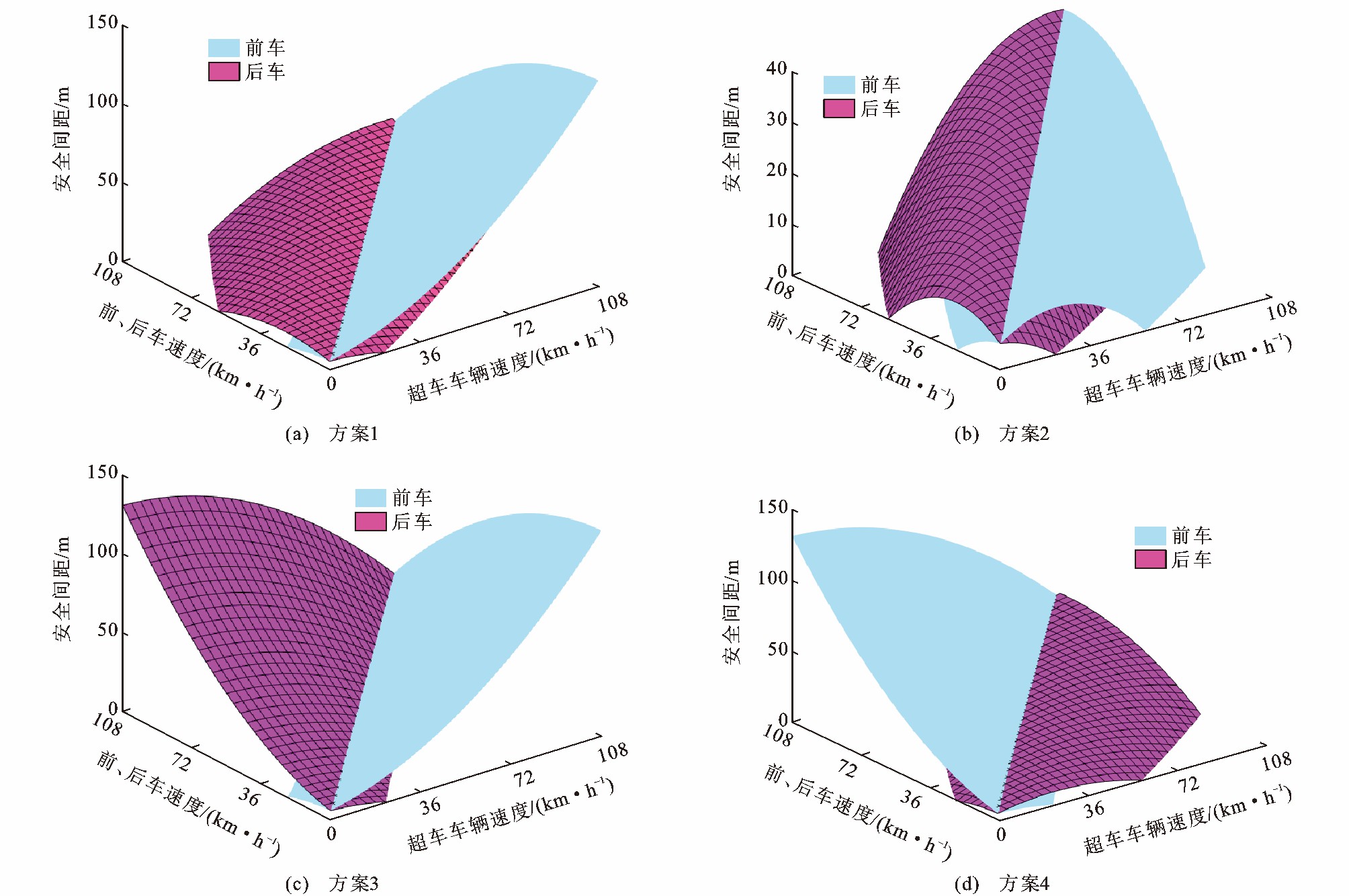
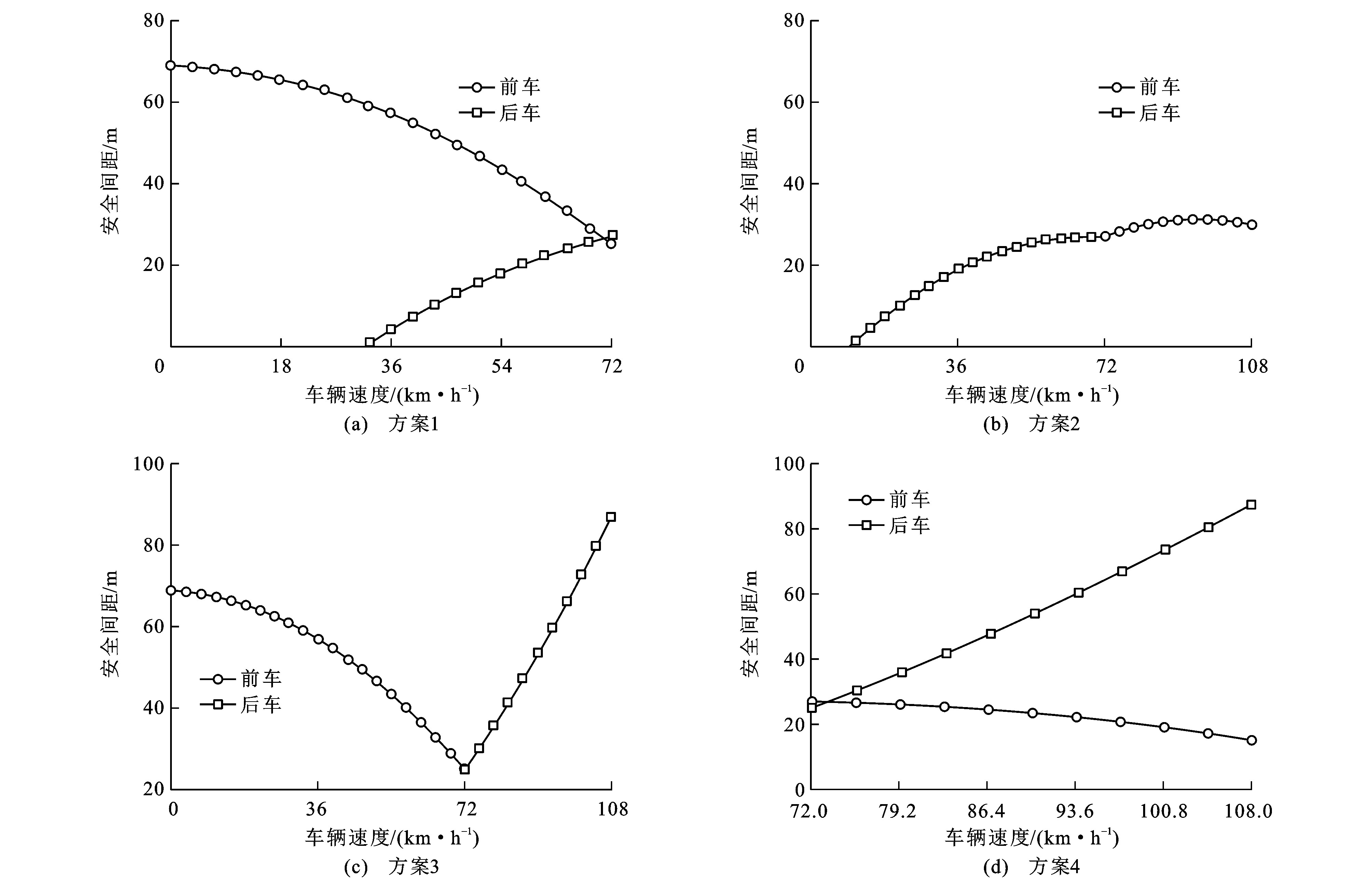
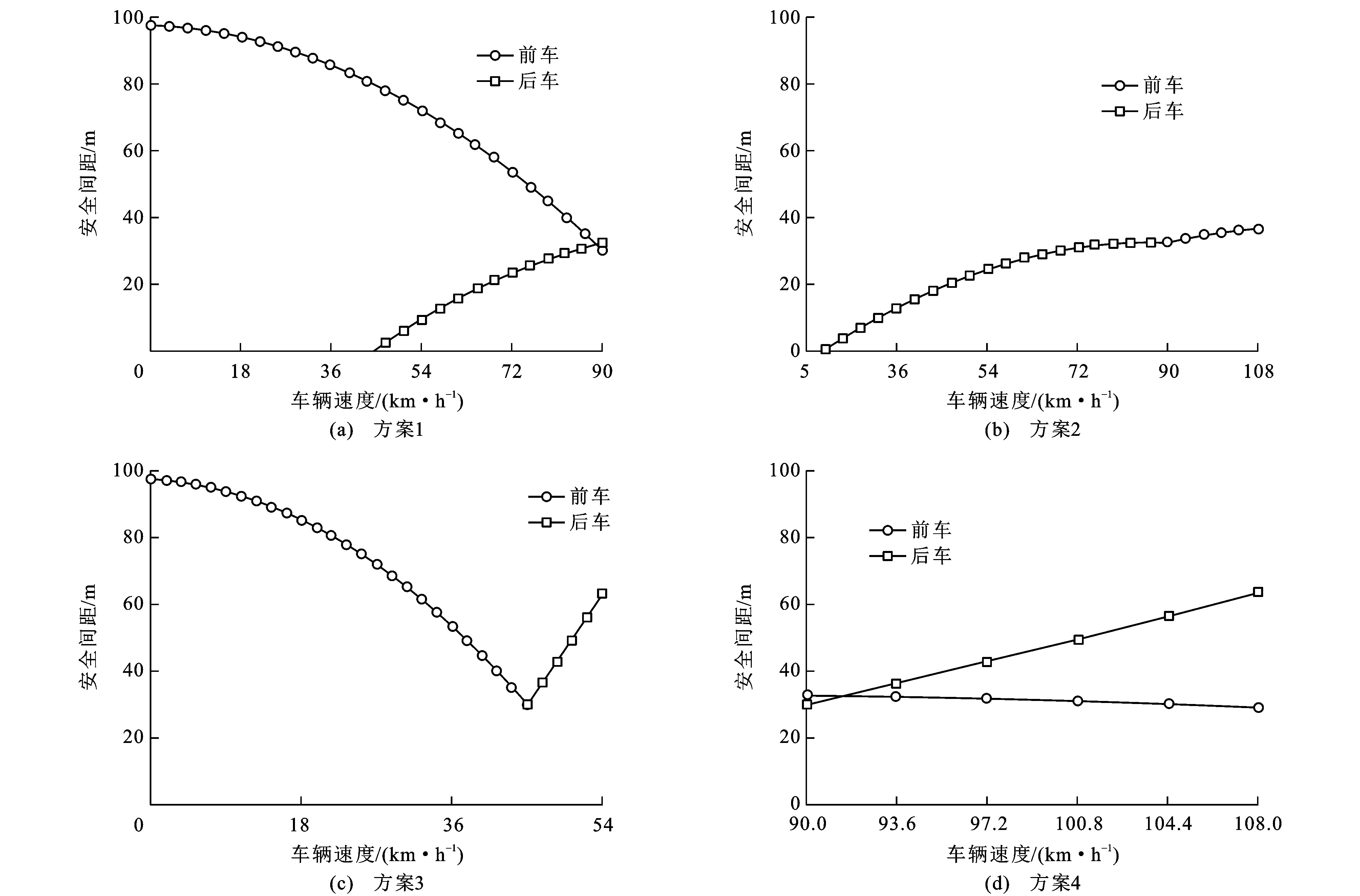
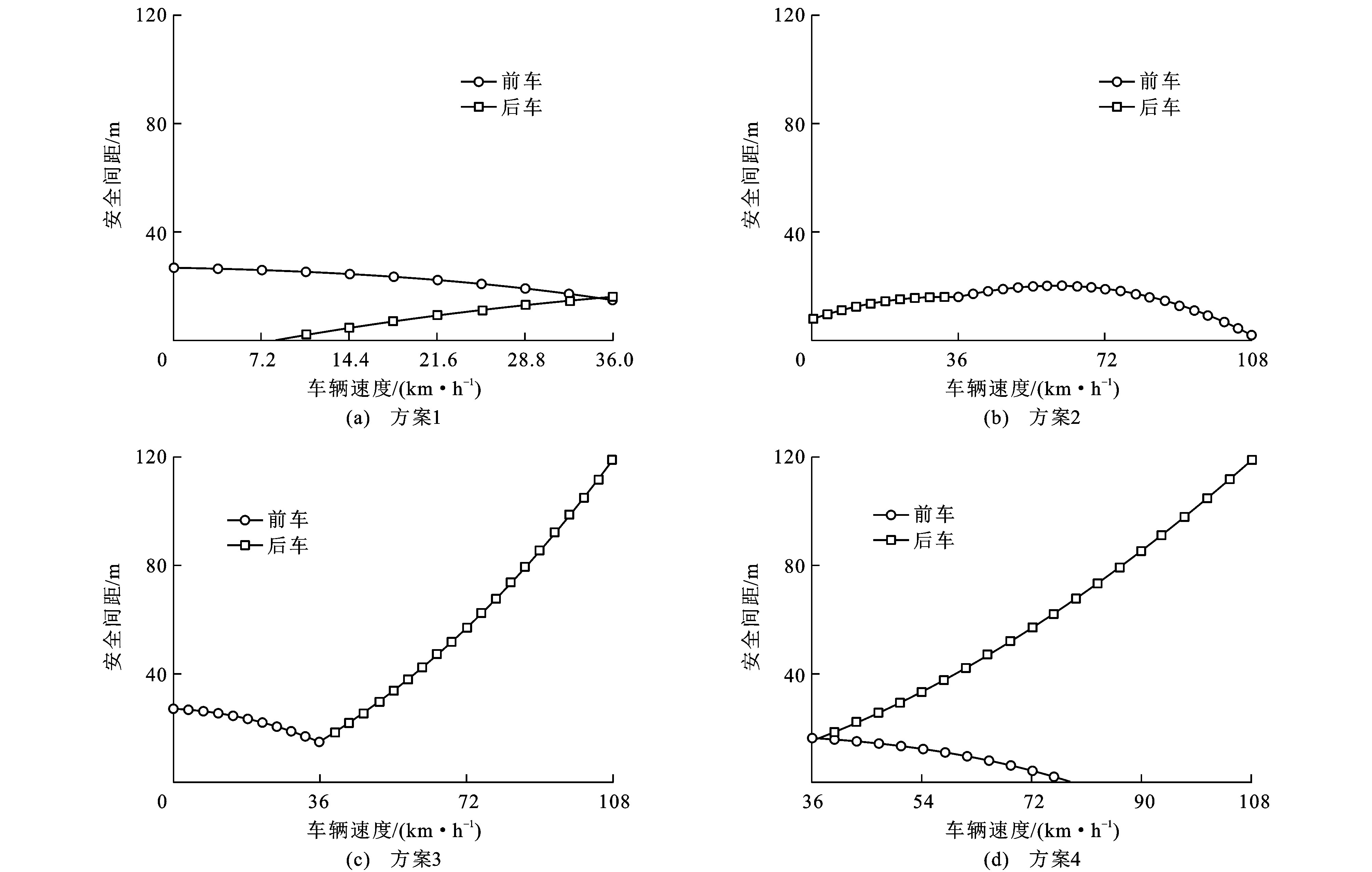
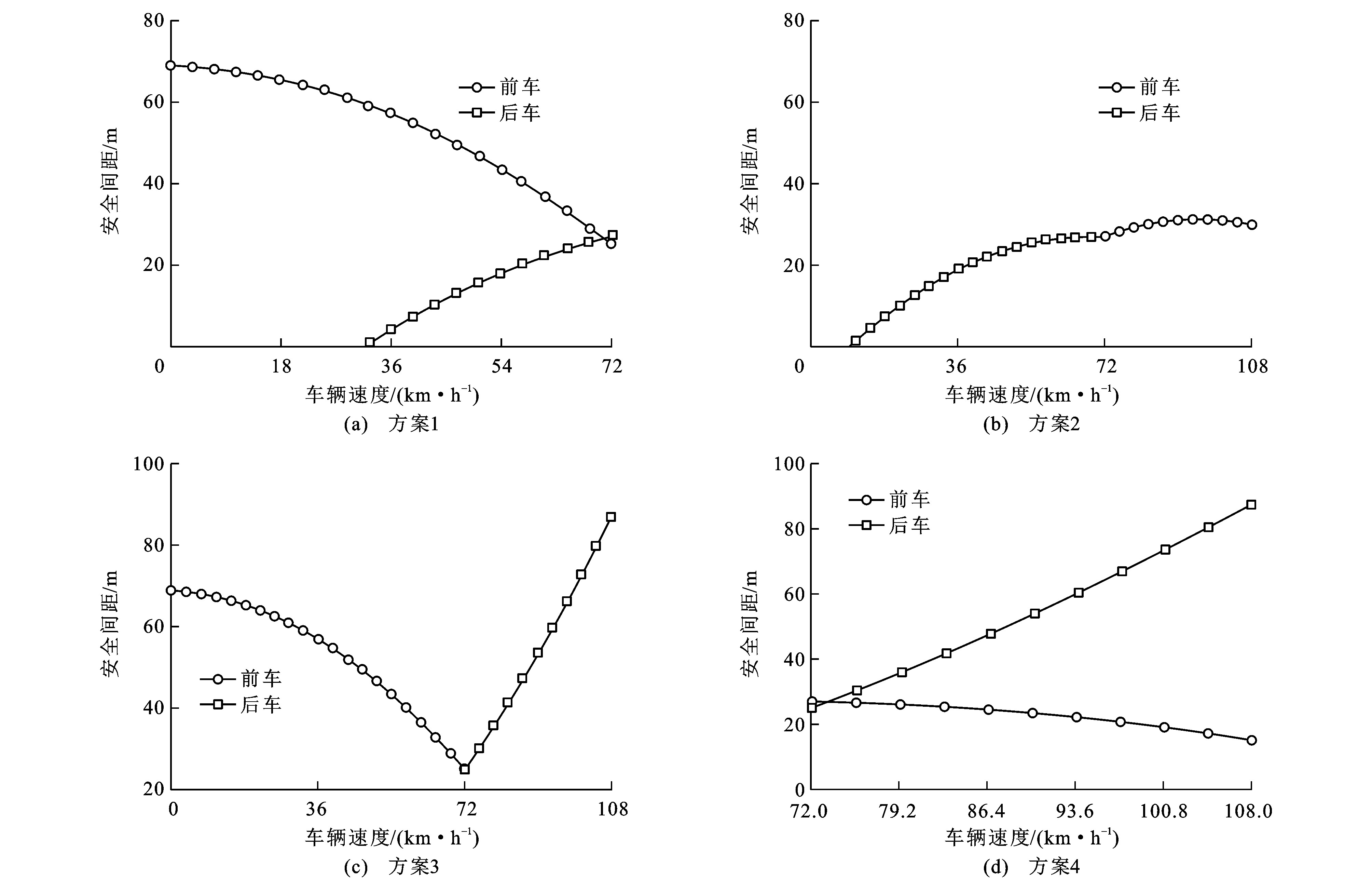
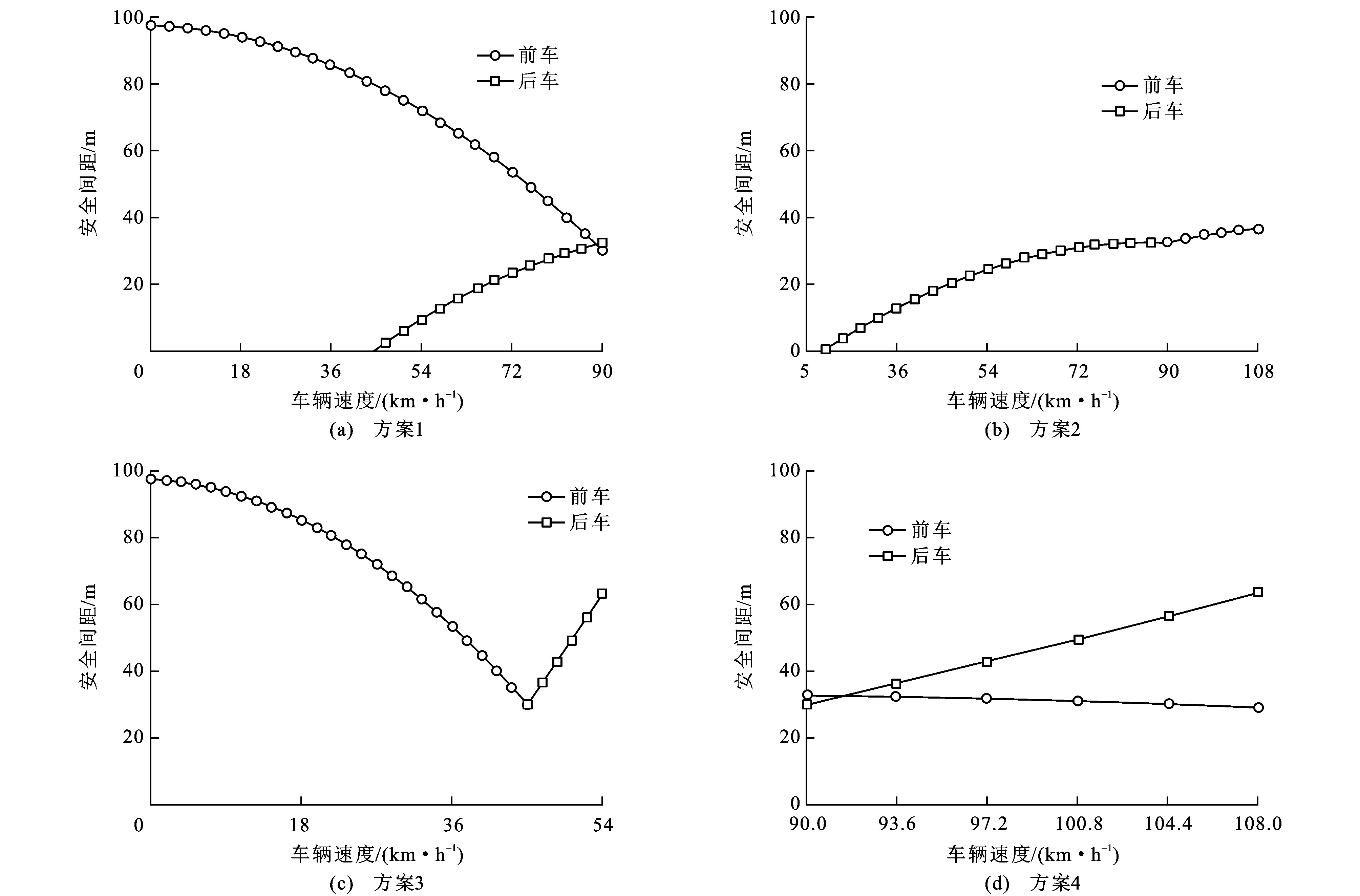
| 方案 | v5与v6关系 | v5与v7关系 | 图示 |
| 1 | v5 > v6 | v5 > v7 | 3 (a) |
| 2 | v5≤v6 | v5 > v7 | 3 (b) |
| 3 | v5 > v6 | v5≤ v7 | 3 (c) |
| 4 | v5≤v6 | v5≤v7 | 3 (d) |
 DownLoad:
CSV
DownLoad:
CSV

|
|
| 参数 | 数值 |
| s3/m | 600 |
| H/m | 0.5 |
| l1、l2/m | 5 |
| N/veh | 30 |
| a2/ (m·s-2) | 4 |
| a3/ (m·s-2) | 4 |
| a4/ (m·s-2) | 7 |
| v0/ (m·s-1) | 12 |
| v′k/ (m·s-1) | 10 |
| v1/ (m·s-1) | 10 |
| t3/s | 1 |
| t4/s | 0.2 |
| t11/s | 3 |
DownLoad:
CSV
| 车辆行驶距离/m | 超越车队车辆数/veh | 安全间隙后车减速度/ (m·s-2) | 安全间隙前车加速度/ (m·s-2) | 超车车辆入队减速度/ (m·s-2) | 超车车辆减速时间/s |
| 169.69 | 4 | 4.27 | 2.11 | 4.28 | 2.19 |
| 169.58 | 3 | 4.77 | 3.07 | 3.52 | 1.70 |
| 169.48 | 3 | 4.51 | 2.98 | 4.58 | 1.54 |
| 169.19 | 4 | 4.32 | 2.54 | 4.63 | 1.16 |
| 169.18 | 3 | 4.41 | 2.64 | 3.71 | 2.21 |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| 168.22 | 3 | 4.42 | 2.69 | 4.47 | 2.08 |
| 167.59 | 3 | 4.79 | 3.01 | 4.07 | 1.65 |
| 167.58 | 3 | 4.87 | 2.76 | 4.39 | 1.23 |
| 167.19 | 3 | 4.65 | 3.58 | 3.92 | 2.15 |
| 167.11 | 4 | 5.23 | 2.92 | 4.25 | 2.13 |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| 166.88 | 3 | 4.63 | 3.05 | 3.96 | 1.70 |
| 166.76 | 3 | 5.09 | 3.00 | 3.82 | 1.52 |
| 166.69 | 3 | 5.03 | 3.78 | 3.39 | 1.27 |
| 166.63 | 4 | 5.47 | 3.04 | 3.84 | 2.00 |
| 166.42 | 3 | 4.22 | 2.45 | 4.73 | 0.94 |
DownLoad:
CSV

| [1] |
ZHANG Wen-hui, DAI Jing, PEI Yu-long, et al. Drivers' visual search patterns during overtaking maneuvers on freeway[J]. International Journal of Environmental Research and Public Health, 2016, 13: 1-15.
|
| [2] |
RAWAT K, KATIYAR V K, GUPTA P. Two-lane traffic flow simulation model via cellular automaton[J]. International Journal of Vehicular Technology, 2012, 2012: 1-6.
|
| [3] |
WANG Run-qi, ZHOU Yong-jun, XIAO Chuan-en. Calculation method of overtaking sight distance for dual-lane highway[J]. Journal of Traffic and Transportation Engineering, 2011, 11 (3): 68-73. (in Chinese). doi: 10.3969/j.issn.1671-1637.2011.03.012
|
| [4] |
XU Lun-hui, HU San-gen, WU Shuai, et al. Overtaking model for two-lane highway considering vehicle running characteristics[J]. Journal of South China University of Technology (Natural Science Edition), 2015, 43 (4): 7-13, 27. (in Chinese). doi: 10.3969/j.issn.1000-565X.2015.04.002
|
| [5] |
CHENG Sen-lin, WANG Chuan-hai, ZHANG Shuang-teng, et al. Study on control strategy for personalised lane-change on highway[J]. The Journal of Engineering, 2018, 2018 (16): 1724-1730. doi: 10.1049/joe.2018.8269
|
| [6] |
LLORCA C, MORENO A T, GARCIA A. Modelling vehicles acceleration during overtaking manoeuvres[J]. IET Intelligent Transport Systems, 2016, 10 (3): 206-215. doi: 10.1049/iet-its.2015.0035
|
| [7] |
ATOMBO C, WU Chao-zhong, ZHONG Ming, et al. Investigating the motivational factors influencing drivers intentions to unsafe driving behaviours: speeding and overtaking violations[J]. Transportation Research Part F: Traffic Psychology and Behavior, 2016, 43: 104-121. doi: 10.1016/j.trf.2016.09.029
|
| [8] |
RONG Jian, LIU Shi-jie, SHAO Chang-qiao, et al. Application of overtaking model in two-lane highway simulation system[J]. Journal of Highway and Transportation Research and Development, 2007, 24 (11): 136-139. (in Chinese). doi: 10.3969/j.issn.1002-0268.2007.11.030
|
| [9] |
DANG Rui-na, WANG Jian-qiang, LI Ke-qiang, et al, Driver lane change characteristics for various highway driving conditions[J]. Journal of Tsinghua University (Science and Technology), 2013, 53 (10): 1481-1485. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QHXB201310022.htm
|
| [10] |
WANG Chang, FU Rui, ZHANG Qiong, et al. Research on parameter TTC characteristics of lane change warning system[J]. China Journal of Highway and Transport, 2015, 28 (8): 91-100, 108. (in Chinese). doi: 10.3969/j.issn.1001-7372.2015.08.012
|
| [11] |
XU Lei, PENG Jin-shuan. Simulation and analysis on overtaking lane change based on Simulink and Carsim[J]. Science Technology and Engineering, 2014, 14 (29): 300-303. (in Chinese). doi: 10.3969/j.issn.1671-1815.2014.29.058
|
| [12] |
BAI Wei, LI Cun-jun. Overtaking model based on different limiting speed[J]. Journal of Transportation Systems Engineering and Information Technology, 2013, 13 (2): 63-68, 95. (in Chinese). doi: 10.3969/j.issn.1009-6744.2013.02.010
|
| [13] |
XIONG Xiao-xia, CHEN Long, LIANG Jun, et al. A study on the driving behavior prediction of dangerous lane change[J]. Automotive Engineering, 2017, 39 (9): 1040-1046, 1067. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201709010.htm
|
| [14] |
LI Xun, QU Shi-ru, XIA Yu. Cooperative lane-changing rules on multilane under condition of cooperative vehicle and infrastructure system[J]. China Journal of Highway and Transport, 2014, 27 (8): 97-104. (in Chinese). doi: 10.3969/j.issn.1001-7372.2014.08.013
|
| [15] |
MILANÉS V, LLORCA D F, VILLAGRÁ J, et al. Intelligent automatic overtaking system using vision for vehicle detection[J]. Expert Systems with Applications, 2012, 39 (3): 3362-3373. doi: 10.1016/j.eswa.2011.09.024
|
| [16] |
CHEN Jun-jie, CAI Bai-gen, SHANGGUAN Wei, et al. Influence of Vehicle Cluster Driving Behavior on Traffic Flow Efficiency[C]//IEEE. 2017 Chinese Automation Congress. New York: IEEE, 2017: 6349-6354.
|
| [17] |
CHAPMAN J R, NOYCE D A. Influence of roadway geometric elements on driver behavior when overtaking bicycles on rural roads[J]. Journal of Traffic and Transportation Engineering (English Edition), 2014, 1 (1): 28-38. doi: 10.1016/S2095-7564(15)30086-6
|
| [18] |
ASAITHAMBI G, SHRAVANI F. Overtaking behavior of vehicles on undivided roads in non-lane based mixed traffic conditions[J]. Journal of Traffic and Transportation Engineering (English Edition), 2017, 4 (3): 252-261. doi: 10.1016/j.jtte.2017.05.004
|
| [19] |
YANG Xiao-guang, HUANG Luo-yi, WANG Yin-song, et al. A novel lane change and overtaking assist system design and implementation based on vehicle-to-vehicle communication[J]. Journal of Highway and Transportation Research and Development, 2012, 29 (11): 120-124. (in Chinese). doi: 10.3969/j.issn.1002-0268.2012.11.022
|
| [20] |
KINNEAR N, HELMAN S, WALLBANK C, et al. An experimental study of factors associated with driver frustration and overtaking intentions[J]. Accident Analysis and Prevention, 2015, 79: 221-230. doi: 10.1016/j.aap.2015.03.032
|
| [21] |
VLAHOGIANNI E I, GOLIAS J C. Bayesian modeling of the microscopic traffic characteristics of overtaking in two-lane highways[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2012, 15 (3): 348-357. doi: 10.1016/j.trf.2012.02.002
|
| [22] |
HAJEK W, GAPONOVA I, FlEISCHER K H, et al. Workload-adaptive cruise control—a new generation of advanced driver assistance systems[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2013, 20: 108-120. doi: 10.1016/j.trf.2013.06.001
|
| [23] |
KOSUN C, OZDEMIR S. An entropy-based analysis of lane changing behavior: an interactive approach[J]. Traffic Injury Prevention, 2017, 18 (4): 441-447. doi: 10.1080/15389588.2016.1204446
|
| [24] |
YU Yue, EL KAMEL A, GONG Guang-hong, Modeling and simulation of overtaking behavior involving environment[J]. Advances in Engineering Software, 2014, 67: 10-21.
|
| [25] |
DIXIT S, FALLAH S, MONTANARO U, et al. Trajectory planning and tracking for autonomous overtaking: State-of-the-art and future prospects[J]. Annual Reviews in Control, 2018, 45: 76-86. doi: 10.1016/j.arcontrol.2018.02.001
|
| [26] |
XU Guo-qing, LIU Li, OU Yong-sheng, et al. Dynamic modeling of driver control strategy of lane-change behavior and trajectory planning for collision prediction[J]. IEEE Transportations on Intelligent Transportation Systems, 2012, 13 (3): 1138-1155.
|
| [27] |
YANG Da, ZHENG Shi-yu, WEN Cheng, et al. A dynamic lane-changing trajectory planning model for automated vehicles[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 228-247.
|
| [28] |
SUH J, CHAE H, YI K. Stochastic model-predictive control for lane change decision of automated driving vehicles[J]. IEEE Transactions on Vehicular Technology, 2018, 67 (6): 4771-4782.
|
| [29] |
ZHU Wen-xing, ZHANG Li-dong. A new car-following model for autonomous vehicles flow with mean expected velocity field[J]. Physica A: Statistical Mechanics and its Applications, 2018, 492: 2154-2165.
|
| [30] |
SHAN Xiao-feng, XIA Dong, WANG Hao. Dilemma zone in two-lane highways[J]. Journal of Highway and Transportation Research and Development, 2007, 24 (3): 111-114. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GLJK200703025.htm
|
| [1] | PENG Jia-li, SHANGGUAN Wei, CHAI Lin-guo, QIU Wei-zhi. Car-following model and optimization strategy for connected and automated vehicles under mixed traffic environment[J]. Journal of Traffic and Transportation Engineering, 2023, 23(3): 232-247. doi: 10.19818/j.cnki.1671-1637.2023.03.018 |
| [2] | LU Wan-li, LYU Ji-dong, GAO Jin-jin, CHAI Ming, LIU Hong-jie, TANG Tao, LI Dan-yong, SONG Dong-liang. Stability model verification and control strategy optimization of train platoon based on stochastic priced timed game[J]. Journal of Traffic and Transportation Engineering, 2023, 23(2): 273-286. doi: 10.19818/j.cnki.1671-1637.2023.02.020 |
| [3] | LIU Zhan-wen, FAN Song-hua, QI Ming-yuan, DONG Ming, WANG Pin, ZHAO Xiang-mo. Multi-task perception algorithm of autonomous driving based on temporal fusion[J]. Journal of Traffic and Transportation Engineering, 2021, 21(4): 223-234. doi: 10.19818/j.cnki.1671-1637.2021.04.017 |
| [4] | LI Xun, LIU Yao, LI Peng-fei, ZHANG Lei, ZHAO Zheng-fan. Vehicle multi-target detection method based on YOLO v2 algorithm under darknet framework[J]. Journal of Traffic and Transportation Engineering, 2018, 18(6): 142-158. doi: 10.19818/j.cnki.1671-1637.2018.06.015 |
| [5] | HE Zheng-wei, YANG Fan, LIU Li-rong. Ship safe navigation depth reference map based on AIS data[J]. Journal of Traffic and Transportation Engineering, 2018, 18(4): 171-181. doi: 10.19818/j.cnki.1671-1637.2018.04.018 |
| [6] | GAO Miao, SHI Guo-you, LI Wei-feng. Online compression algorithm of AIS trajectory data based on improved sliding window[J]. Journal of Traffic and Transportation Engineering, 2018, 18(3): 218-227. doi: 10.19818/j.cnki.1671-1637.2018.03.022 |
| [7] | LIANG Min-jian, CUI Xiao-yu, SONG Qing-song, ZHAO Xiang-mo. Traffic sign recognition method based on HOG-Gabor feature fusion and Softmax classifier[J]. Journal of Traffic and Transportation Engineering, 2017, 17(3): 151-158. |
| [8] | LIU Xing-long, CHU Xiu-min, MA Feng, LEI Jin-yu. Discriminating method of abnormal dynamic information in AIS messages[J]. Journal of Traffic and Transportation Engineering, 2016, 16(5): 142-150. doi: 10.19818/j.cnki.1671-1637.2016.05.016 |
| [9] | ZHANG Shao-yang, GE Li-juan, AN Yi-sheng, CAO Jin-shan. Research status and development of transportation data standards[J]. Journal of Traffic and Transportation Engineering, 2014, 14(2): 112-126. |
| [10] | LIU Qin, XU Jian-min. Coordinated control model of regional traffic signals[J]. Journal of Traffic and Transportation Engineering, 2012, 12(3): 108-112. doi: 10.19818/j.cnki.1671-1637.2012.03.016 |
| [11] | YU Bin, WU Shan-hua, WANG Ming-hua, ZHAO Zhi-hong. K-nearest neighbor model of short-term traffic flow forecast[J]. Journal of Traffic and Transportation Engineering, 2012, 12(2): 105-111. doi: 10.19818/j.cnki.1671-1637.2012.02.015 |
| [12] | HU Hua, GAO Yun-feng, YANG Xiao-guang. Probabilistic traffic forecast method based on comprehensive transport information platform[J]. Journal of Traffic and Transportation Engineering, 2009, 9(3): 122-126. doi: 10.19818/j.cnki.1671-1637.2009.03.024 |
| [13] | SHENG Jing. Locating algorithm of driver lip feature points based on machine vision[J]. Journal of Traffic and Transportation Engineering, 2009, 9(4): 118-121. doi: 10.19818/j.cnki.1671-1637.2009.04.023 |
| [14] | HE Si-hua, YANG Shao-qing, SHI Ai-guo, LI Tian-wei. Ship target detection algorithm on sea surface based on block chaos feature of image sequence[J]. Journal of Traffic and Transportation Engineering, 2009, 9(1): 73-76. doi: 10.19818/j.cnki.1671-1637.2009.01.015 |
| [15] | ZHANG Da-qi, QU Shi-ru, SHI Shuang. Edge detection algorithm of moving vehicle based on sequential image motion segmentation[J]. Journal of Traffic and Transportation Engineering, 2009, 9(3): 117-121. doi: 10.19818/j.cnki.1671-1637.2009.03.023 |
| [16] | ZHANG Ning, HE Tie-jun, GAO Chao-hui, HUANG Wei. Detection method of traffic signs in road scenes[J]. Journal of Traffic and Transportation Engineering, 2008, 8(6): 104-109. |
| [17] | JIANG Gui-yan, GANG Long-hui, WANG Jiang-feng. Traffic congestion identification method of urban expressway[J]. Journal of Traffic and Transportation Engineering, 2006, 6(3): 87-91. |
| [18] | SHI Xin. Information organizing and transforming of value-added information system of port and shipping EDI[J]. Journal of Traffic and Transportation Engineering, 2005, 5(2): 85-88. |
| [19] | Pan Ming-yang, Zhao De-peng, Wang De-qiang, Li Shao-xi. Ship navigation system based on distributed WebChart[J]. Journal of Traffic and Transportation Engineering, 2005, 5(3): 77-82. |
| [20] | LI Wen-yong, WANG Wei, CHEN Xue-wu. Bus travel transit path based on ant algorithm[J]. Journal of Traffic and Transportation Engineering, 2004, 4(4): 102-105. |
| 1. | 戢晓峰,俸才梅,李武,韩春阳,覃文文. 双车道公路超车行为安全研究进展. 安全与环境学报. 2025(01): 21-40 .  | |
| 2. | 钱立军,陈晨,陈健. 无信控交叉口环境下考虑驾驶员误差的集中式轨迹规划. 汽车工程. 2023(05): 768-776+785 . | |
| 3. | Yang Liu,Congling Shi. Mandatory lane-changing decision making and planning in emergency situations. Transportation Safety and Environment. 2023(01): 44-52 . | |
| 4. | 秦严严,唐鸿辉,杨金滢,李淑庆. 混有网联车队的道路通行能力分析. 北京交通大学学报. 2022(01): 79-87 . | |
| 5. | 上官伟,李鑫,柴琳果,曹越,陈晶晶,庞豪杰,芮涛. 车路协同环境下混合交通群体智能仿真与测试研究综述. 交通运输工程学报. 2022(03): 19-40 .  本站查看 本站查看 | |
| 6. | 李晓虎,麦乐,任杰,刘浩学,朱彤. 高速公路施工区自动车辆行驶轨迹优化方法. 交通信息与安全. 2020(03): 40-47 . |

Figures(9) / Tables(3)
Copyright《Journal of Traffic and Transportation Engineering》编辑部陕ICP备05001904号-1
Address :Editorial Department of Journal of Traffic and Transportation Engineering, Chang 'an University, Middle Section of South Second Ring Road, Xi 'an, Shaanxi(710064) Tel:029-82334388 Email:jygc@chd.edu.cn
All visit:1743117Today's visit:128
Supported by:
Beijing Renhe Information Technology Co. Ltd

CHEN Jun-jie, CAI Bo-gen, SHANGGUAN Wei, WANG Jian, CHAI Lin-guo. Slot control optimization of intelligent platoon for dual-lane two-way overtaking behavior[J]. Journal of Traffic and Transportation Engineering, 2019, 19(2): 178-190. doi: 10.19818/j.cnki.1671-1637.2019.02.016

| 方案 | v5与v6关系 | v5与v7关系 | 图示 |
| 1 | v5 > v6 | v5 > v7 | 3 (a) |
| 2 | v5≤v6 | v5 > v7 | 3 (b) |
| 3 | v5 > v6 | v5≤ v7 | 3 (c) |
| 4 | v5≤v6 | v5≤v7 | 3 (d) |
DownLoad:
CSV
| 参数 | 数值 |
| s3/m | 600 |
| H/m | 0.5 |
| l1、l2/m | 5 |
| N/veh | 30 |
| a2/ (m·s-2) | 4 |
| a3/ (m·s-2) | 4 |
| a4/ (m·s-2) | 7 |
| v0/ (m·s-1) | 12 |
| v′k/ (m·s-1) | 10 |
| v1/ (m·s-1) | 10 |
| t3/s | 1 |
| t4/s | 0.2 |
| t11/s | 3 |
DownLoad:
CSV
| 车辆行驶距离/m | 超越车队车辆数/veh | 安全间隙后车减速度/ (m·s-2) | 安全间隙前车加速度/ (m·s-2) | 超车车辆入队减速度/ (m·s-2) | 超车车辆减速时间/s |
| 169.69 | 4 | 4.27 | 2.11 | 4.28 | 2.19 |
| 169.58 | 3 | 4.77 | 3.07 | 3.52 | 1.70 |
| 169.48 | 3 | 4.51 | 2.98 | 4.58 | 1.54 |
| 169.19 | 4 | 4.32 | 2.54 | 4.63 | 1.16 |
| 169.18 | 3 | 4.41 | 2.64 | 3.71 | 2.21 |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| 168.22 | 3 | 4.42 | 2.69 | 4.47 | 2.08 |
| 167.59 | 3 | 4.79 | 3.01 | 4.07 | 1.65 |
| 167.58 | 3 | 4.87 | 2.76 | 4.39 | 1.23 |
| 167.19 | 3 | 4.65 | 3.58 | 3.92 | 2.15 |
| 167.11 | 4 | 5.23 | 2.92 | 4.25 | 2.13 |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| 166.88 | 3 | 4.63 | 3.05 | 3.96 | 1.70 |
| 166.76 | 3 | 5.09 | 3.00 | 3.82 | 1.52 |
| 166.69 | 3 | 5.03 | 3.78 | 3.39 | 1.27 |
| 166.63 | 4 | 5.47 | 3.04 | 3.84 | 2.00 |
| 166.42 | 3 | 4.22 | 2.45 | 4.73 | 0.94 |
DownLoad:
CSV
| 方案 | v5与v6关系 | v5与v7关系 | 图示 |
| 1 | v5 > v6 | v5 > v7 | 3 (a) |
| 2 | v5≤v6 | v5 > v7 | 3 (b) |
| 3 | v5 > v6 | v5≤ v7 | 3 (c) |
| 4 | v5≤v6 | v5≤v7 | 3 (d) |
| 参数 | 数值 |
| s3/m | 600 |
| H/m | 0.5 |
| l1、l2/m | 5 |
| N/veh | 30 |
| a2/ (m·s-2) | 4 |
| a3/ (m·s-2) | 4 |
| a4/ (m·s-2) | 7 |
| v0/ (m·s-1) | 12 |
| v′k/ (m·s-1) | 10 |
| v1/ (m·s-1) | 10 |
| t3/s | 1 |
| t4/s | 0.2 |
| t11/s | 3 |
| 车辆行驶距离/m | 超越车队车辆数/veh | 安全间隙后车减速度/ (m·s-2) | 安全间隙前车加速度/ (m·s-2) | 超车车辆入队减速度/ (m·s-2) | 超车车辆减速时间/s |
| 169.69 | 4 | 4.27 | 2.11 | 4.28 | 2.19 |
| 169.58 | 3 | 4.77 | 3.07 | 3.52 | 1.70 |
| 169.48 | 3 | 4.51 | 2.98 | 4.58 | 1.54 |
| 169.19 | 4 | 4.32 | 2.54 | 4.63 | 1.16 |
| 169.18 | 3 | 4.41 | 2.64 | 3.71 | 2.21 |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| 168.22 | 3 | 4.42 | 2.69 | 4.47 | 2.08 |
| 167.59 | 3 | 4.79 | 3.01 | 4.07 | 1.65 |
| 167.58 | 3 | 4.87 | 2.76 | 4.39 | 1.23 |
| 167.19 | 3 | 4.65 | 3.58 | 3.92 | 2.15 |
| 167.11 | 4 | 5.23 | 2.92 | 4.25 | 2.13 |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| 166.88 | 3 | 4.63 | 3.05 | 3.96 | 1.70 |
| 166.76 | 3 | 5.09 | 3.00 | 3.82 | 1.52 |
| 166.69 | 3 | 5.03 | 3.78 | 3.39 | 1.27 |
| 166.63 | 4 | 5.47 | 3.04 | 3.84 | 2.00 |
| 166.42 | 3 | 4.22 | 2.45 | 4.73 | 0.94 |

 DownLoad:
DownLoad:


 DownLoad:
DownLoad: