

Current Issue
2026, Volume 26, Issue 6
Display Method:







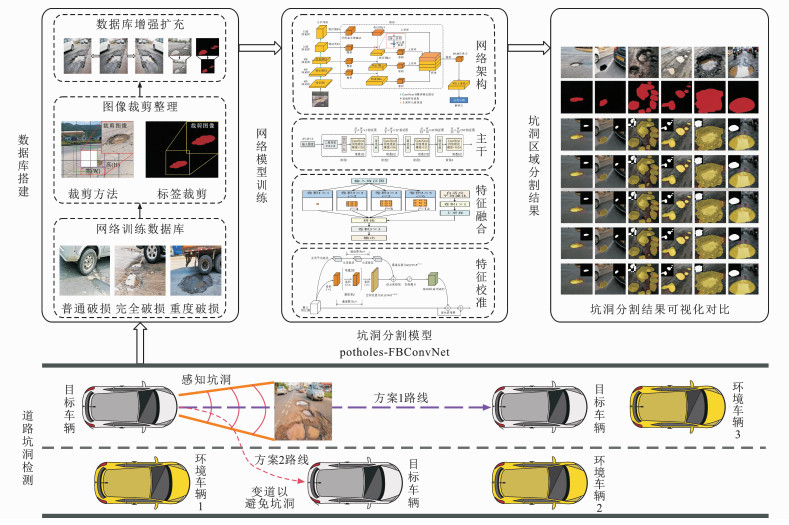
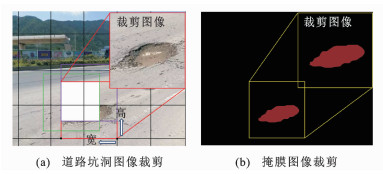
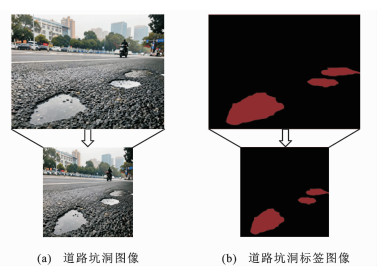
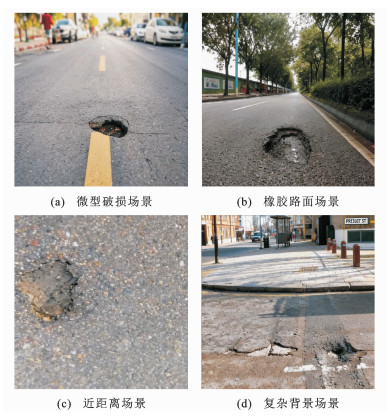
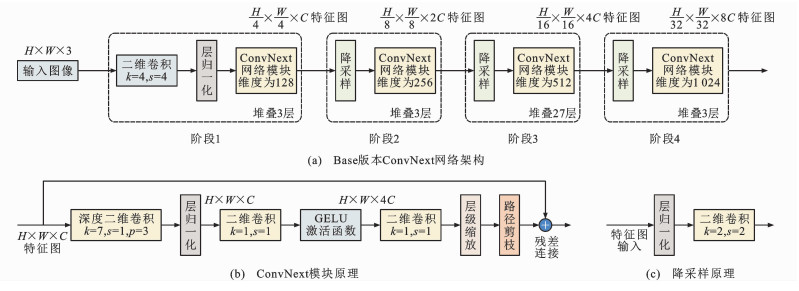
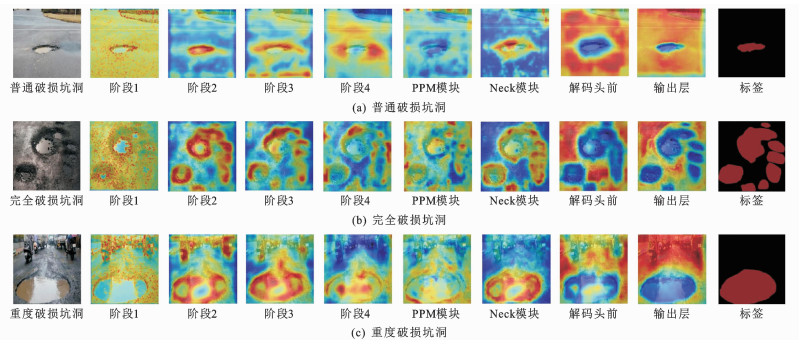
Road pothole segmentation network based on multi-scale feature fusion and channel feature adaptation
Abstract:
More>
2026,
26(6):
167-185.
doi: 10.19818/j.cnki.1671-1637.2026.031