| Citation: | SHANGGUAN Wei, ZHA Yuan-yuan, FU Yao, ZHENG Si-fa, CHAI Lin-guo. Vehicle-infrastructure cooperative credible interaction method based on traffic business characteristics understanding[J]. Journal of Traffic and Transportation Engineering, 2022, 22(4): 348-360. doi: 10.19818/j.cnki.1671-1637.2022.04.027

|
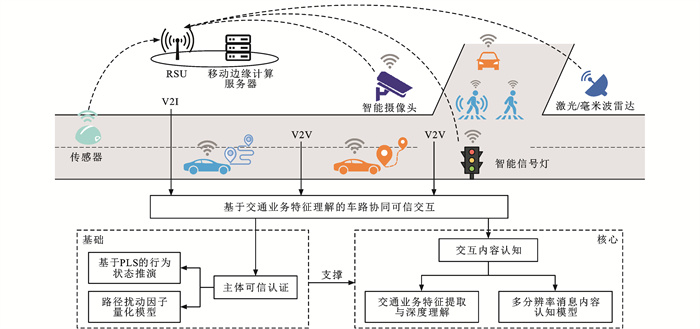
In summary, this article combines the practical needs of typical vehicle to vehicle and vehicle to road collaborative information exchange, considers both traffic participants and interactive information content, and evaluates the credibility of vehicle entities based on vehicle behavior state deduction models and path disturbance factor quantification models; A quantitative model for message urgency and a multi-resolution cognitive model were constructed based on transportation business feature extraction to determine the credibility of interactive content; A trusted interaction method for vehicle road collaboration based on understanding of transportation business characteristics has been proposed, which solves the problems of cumbersome subject trust authentication and insufficient understanding of interaction content in the trusted interaction process of vehicle road collaboration systems, and improves the accuracy of information interaction trust authentication in complex transportation environments.
In actual urban transportation environments, vehicles have certain perception blind spots due to obstacles such as buildings and trees. With the assistance of vehicle road coordination systems, vehicles can increase their comprehensive perception area through information exchange. Based on C-V2X communication technology, the perception information of roadside units and vehicle mounted units is fully exchanged and shared[31]The information interaction of collaborative perception includes two types: vehicle road collaborative interaction and vehicle vehicle collaborative interaction.
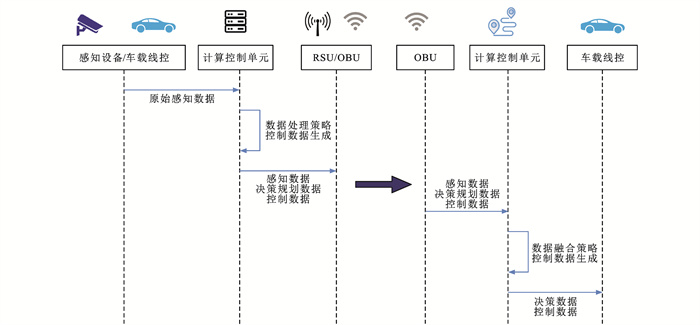
Vehicles can detect other traffic participants around them through self perception devices such as cameras and radars, such asFigure 1As shown. The vehicle sends the processed information to other vehicles with communication devices around it through OBU. The receiving vehicle can formulate reasonable driving strategies based on the fused perception information, ensuring driving safety and improving traffic efficiency.
Step 3: Extraction of effective business features. When receiving information from other vehicles or roadside interactions, effectively extract and deeply understand traffic business features based on trusted interaction requirements.
Step 4: Multi resolution content recognition. Based on the characteristics of transportation business, low resolution filtering and high-resolution cognition are applied to interactive content. If multi-resolution content cognition detection is used, it is judged as trustworthy and valid messages. Otherwise, it is judged as untrustworthy and invalid messages.
Step 5: Determine whether the message sender has a continuous interaction request. If the request is to continue interaction, proceed to Step 2. Otherwise, update the trust level library and end the current trusted interaction process.
Firstly, the trustworthy authentication of the subject is achieved from two aspects: deducing the behavior state of the subject and quantifying the path disturbance factor; Secondly, a traffic business feature extraction and deep understanding method is proposed for the trustworthy interaction requirements in the vehicle road collaborative environment, and the multi-resolution content cognition of interactive information is achieved by integrating traffic business feature understanding; Finally, a vehicle road collaborative trusted interaction method is formed based on subject trusted authentication and centered on interactive content cognition.
| 初始可信等级 | 车辆类型 | 初始信任程度 | λ |
| P1 | 交管车、消防车、警车、救护车 | 可信 | 1.0 |
| P2 | 公交车、出租车、网约车等 | 比较可信 | 0.8 |
| P3 | 城管、水电城市公共设施维修车辆 | 基本可信 | 0.6 |
| P4 | 私人车、单位车等普通车辆 | 不太可信 | 0.4 |
| P5 | 故障、攻击或没进行年检的车等 | 不可信 | 0.2 |
 DownLoad:
CSV
DownLoad:
CSV
| Δt=|t−te| | (1) |
| {Φ(vn)>0dΦ(vn)dΔt<0dΦ2(vn)d2Δt>0 | (2) |
Combining equation (2), toωConstruct vehicles for weighting coefficientsvnThe behavior state trust function
| Φ(vn)=ƛ[ℏ(vn)]e−ω|t−te| | (3) |
| Gj={ck,ejk,wjk} | (4) |
In the formula:ckgroundcjAdjacent RSU nodes that can be reached by departure;ejkandwjkThey are the corresponding road sections and road section weights.
In addition, the credibility calculation of the vehicle subject will be dynamically affected by the historical path selection behavior. Therefore, a path disturbance factor is introduced on the basis of the credibility of the behavior stateλrWhen the coupling degree between vehicle path selection and actual traffic status and vehicle destination path is high, its credibility is high, and the path disturbance factor is set to 1.0; On the contrary, path selection is not the main factor in evaluating the credibility of behavioral states, and the path perturbation factor is set to 0.5. The set of highly correlated path nodes consists of the optimal neighboring RSU nodes and the suboptimal neighboring RSU nodes. In order to fully consider the factors of urban road network topology and real-time traffic situation, the optimal neighboring RSU nodes are selected based on the shortest distance between nodes in a static environment, and the Dijkstra algorithm based on the shortest path is used for solving; The optimal selection of the next best neighboring RSU nodes based on the road traffic capacity between nodes in a dynamic environment, combined with real-time traffic road conditions, quantifies the travel time cost as road traffic impedance, and solves it using the node deletion method based on the Bureau of Public Road (BPR) function in the United States. The set of highly correlated path nodes for the jth RSU nodeNjCan be expressed as
| Nj={ca,cb}j=1,2,⋯,q | (5) |
In summary, the path disturbance factor can be obtained as
| λr={1.0cj∈Nj−10.5cj∉Nj−1 | (6) |
Vehicle subject behaviorVBThe description of the vehicle includes its state (mainly referring to speed and position) and path selection. The RSU records the state information of the vehicle's main body during operation and forms a formal sequence in chronological order. The behavior sequence of the vehicle's main body is called
| VB={SR,1,SR,2,⋯,SR,q} | (7) |
In the formula:SR, jFor vehicles passing throughjPerformance of vehicle behavior status recorded by RSU.
The current RSU can achieve sequence extraction by interacting with the previous RSU passed by the vehicle. To avoid excessive communication resources occupied by interactions between RSUs in large-scale road networks, the number of hops for forwarding sequence information is set to one hop. Based on the analysis of vehicle subject behavior in combination with the requirements of trusted interactive subject authentication, a function is constructed from two aspects: real-time status and path selectionf1(·) Quantify the credibility of the calculation subjectκ(0≤κ≤ 1) for
| κ=f1(zi,Nj−1,SR,j−1,SR,j)=λ(zi)λre−ω|t−te| | (8) |
According to the analysis of interaction requirements, the interaction information message contains 7 main characteristics of the generator and transmitter, corresponding to sender category, information type, information sending time, sender status description, information event description, vehicle reputation value, and information propagation hop count. The effective characteristics of the message are related to the sender type (roadside, vehicle) and the type of message sent (Security Efficiency Message (SEM), Beacon Location Message (BLM)). Due to the determinacy of the RSU location, the content of its beacon message will not be discussed. This article studies the effective characteristics of three types of message messages.
| M1=(TR,PR,ER,HR) | (9) |
| M2=(Tv,PV,EV,HV) | (10) |
If the message message isTVTime is determined by the geographical location of the corresponding vehiclePVIf generated, the effective features of the message are usedM3Representing, i.e
| M3=(TV,PV) | (11) |
| M4=(Tv,PV,EV) | (12) |
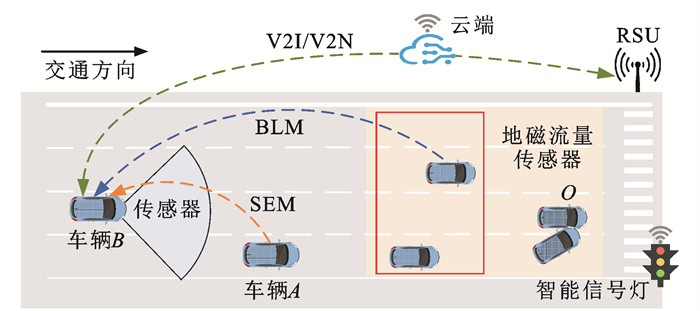
Construct a distance calculation function based on the latitude and longitude information of vehicle A and event location O sent by SEMf2(·), calculate the distance between two placesDOAdo
| DOA=f2(PA, Lo,PA,La,PO, Lo,PO,La) | (13) |
In the formula:PA, LoandPA, LaFor vehicles respectivelyALocation latitude and longitude information;PO, LoandPO, LaThey are the locations where the events occurredOThe latitude and longitude information.
SEM receives vehiclesBaccording toOPoint distance can be measured through its own sensors V2I/V2N、 Calculate the accident location based on the BLM of nearby vehicles in the alarm areaONearby reference traffic flowγO.M4fusionDOAgiveγOMulti dimensional fusion feature vector obtained from featuresMf
| Mf=(TV,DOA,γO,EV) | (14) |
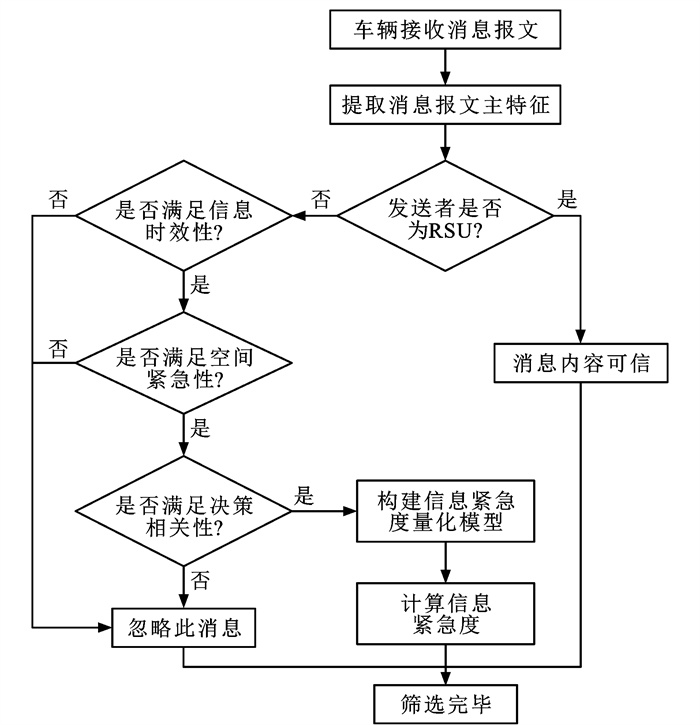
Step 1: Sender type discrimination. If the sender is identified as RSU based on the valid characteristics of the message, the trust level is the highest, marked as trustworthy, and the screening is ended; On the contrary, execute Step 2.
Step 3: Space urgency test. The message receiving vehicle only needs to focus on events that are highly relevant to the vehicle and calculate the distance impact factorλDIfλD=0. If the message describes that the location of the event is far away from the vehicle or behind the vehicle, ignore this message and end the filtering process. Otherwise, proceed to Step 4.
| U(x)={wCλTλDλPe−wT(tx,r−tx, g)−wSHVρ(M)M∈ΓSwCλTλDλPe−wT(tx,r−tx, g)−wB⋅vr−vg∣vrρ(M)M∈ΓB | (15) |
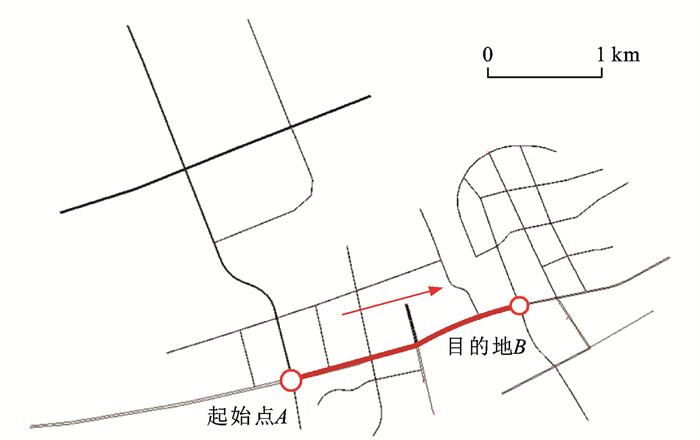
To build a typical interaction scenario in the vehicle road collaborative environment, Veins, which includes OMNeT++and SUMO simulation simulators, was selected to construct the simulation environment. OMNeT++is a C++simulation framework used to build a network simulator. SUMO simulates local roads in Houchang Village, Haidian District, Beijing. The OpenStreetMap (OSM) map with longitude range of 116.268 1 °~116.303 0 ° E and latitude range of 40.050 2 °~40.071 0 ° N is imported into SUMO to form a simulation mapFigure 5As shown. Select from location A (40.050 1 ° N, 116.278 6 ° E) to B ground (40.056 5 ° N, 116.371 (7 ° E) Vehicle simulation data for straight sections.
Set the overtaking scenario for vehicles on open roads as overtaking vehicle V1 overtaking vehicle V2. As vehicle V3 is driving in an adjacent lane, vehicle V1 refers to the speed and position information of surrounding vehicles for overtaking behavior. Construct a vehicle to vehicle interaction scenario based on bidirectional four lane overtaking behavior, with simulation parameter settings as followsTable 2As shown.
| 项目 | 数值 |
| 车辆运行车道数 | 4 |
| 车辆运行长度/m | 300 |
| 车辆长度/m | 4 |
| 行驶车辆数/veh | 100 |
| 最大行驶速度/(km·h-1) | 80 |
| 最小行驶速度/(km·h-1) | 0 |
| 最大加速度/(m·s-2) | 2.5 |
| 最大减速度/(m·s-2) | 9 |
| 初始速度/(km·h-1) | 30 |
DownLoad:
CSV
| 项目 | 数值 |
| 车辆运行车道数 | 4 |
| 车辆运行长度/m | 600 |
| 车辆长度/m | 4 |
| 行驶车辆数/veh | 500 |
| 最大行驶速度/(km·h-1) | 50 |
| 最小行驶速度/(km·h-1) | 0 |
| 最大加速度/(m·s-2) | 2.5 |
| 最大减速度/(m·s-2) | 9 |
| 初始速度/(km·h-1) | 30 |
DownLoad:
CSV

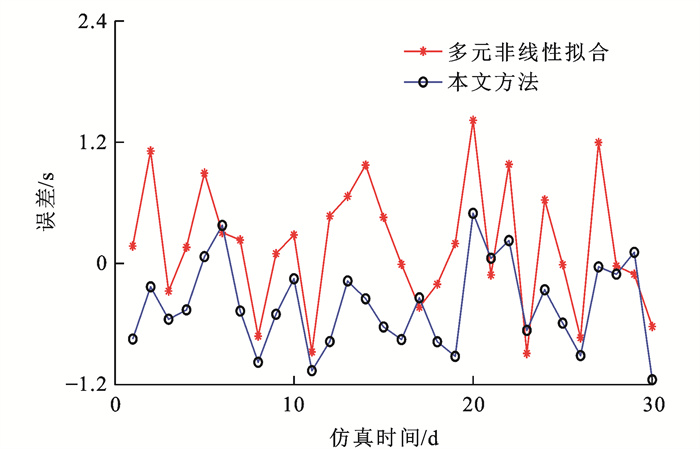


| 推演方法 | 平均绝对相对误差 | 最大绝对相对误差 | ||
| 畅通时段 | 高峰时段 | 畅通时段 | 高峰时段 | |
| 本文方法 | 1.85 | 5.21 | 5.87 | 11.25 |
| 多元非线性拟合 | 1.93 | 5.89 | 5.32 | 12.58 |
DownLoad:
CSV
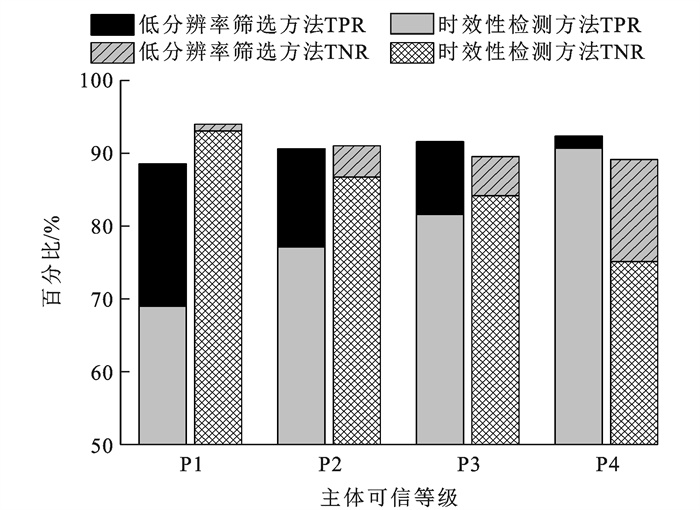
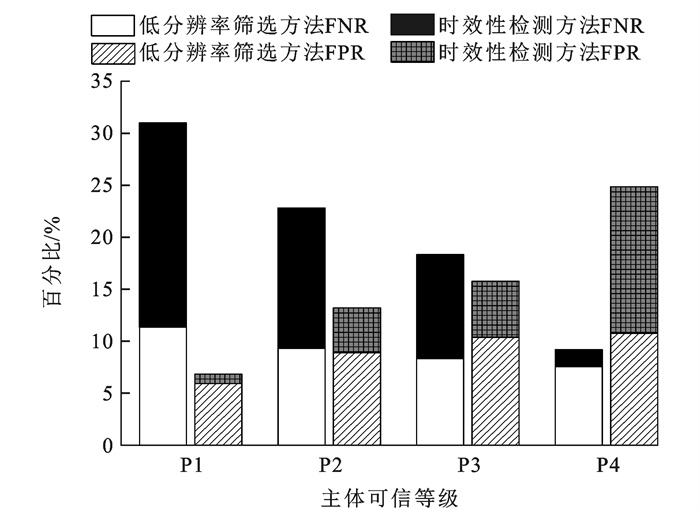
To verify the applicability of the vehicle road collaborative trusted interaction method based on the premise of subject behavior authentication and the core understanding of transportation business characteristics, experiments were conducted in typical scenarios of vehicle road collaboration using a multi-resolution content cognition method, in addition to the subject trusted authentication method based on PLS behavior state deduction. In order to quantify the corresponding experimental results, according toTable 5Determine the corresponding evaluation indicators based on the confusion matrix of various message classification results, including:A1The invalid message is correctly identified as an invalid message;A2The invalid message was mistakenly identified as a valid message;A3The valid message was mistakenly identified as an invalid message;A4The valid message is correctly identified as a valid message.
| 实际类别 | 分类结果 | |
| 无效消息 | 有效消息 | |
| 无效消息 | A1 | A2 |
| 有效消息 | A3 | A4 |
DownLoad:
CSV
Define the True Positive Rate (TPR), True Negative Rate (TNR), False Positive Rate (FPR), False Negative Rate (FNR), and Accuracy Rate (AR) for detecting invalid messages as follows:
| Q1=A1A1+A2 | (16) |
| Q2=A4A4+A3 | (17) |
| Q3=A3A3+A4 | (18) |
| Q4=A2A1+A2 | (19) |
| Q5=A1+A4A1+A2+A3+A4 | (20) |
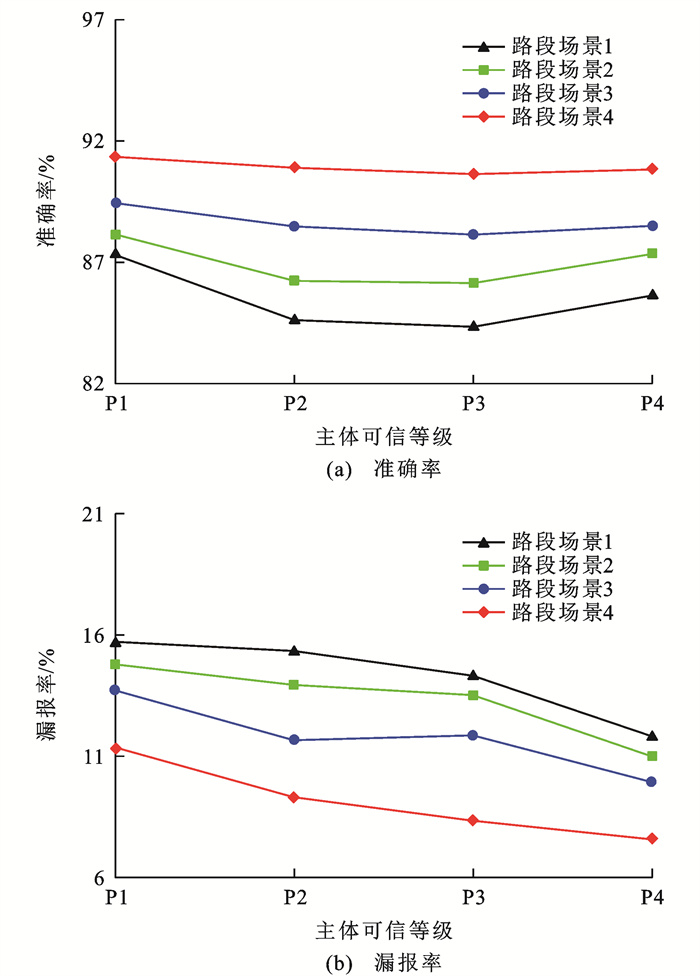
| 交通场景 | CAV占比 | AHDV占比 | CHDV占比 | 占比总计 |
| 路段场景1 | 25.0 | 37.5 | 37.5 | 100.0 |
| 路段场景2 | 50.0 | 25.0 | 25.0 | 100.0 |
| 路段场景3 | 75.0 | 12.5 | 12.5 | 100.0 |
| 路段场景4 | 100.0 | 0.0 | 0.0 | 100.0 |
DownLoad:
CSV
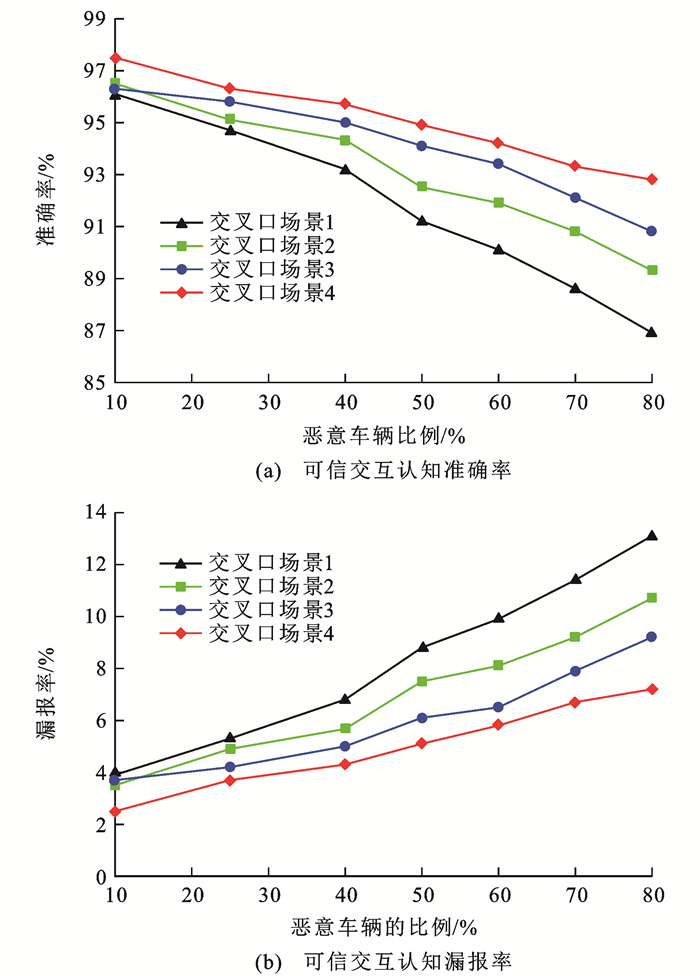
For mixed traffic environments, HDVs in signalized intersection scenes are classified into four categories (HDV1~HDV4) based on the differences in vehicle kinematic characteristics and driver driving habits. The Intelligent Diver Model (IDM) in classical vehicle motion control models is used as the core control model for environmental vehicles in the longitudinal dimension,Table 7Description of mixed traffic scenarios at signalized intersections.
| 交通场景 | CAV占比 | HDV1占比 | HDV2占比 | HDV3占比 | HDV4占比 | 占比总计 |
| 交叉口场景1 | 25.00 | 18.75 | 18.75 | 18.75 | 18.75 | 100.00 |
| 交叉口场景2 | 50.00 | 12.50 | 12.50 | 12.50 | 12.50 | 100.00 |
| 交叉口场景3 | 75.00 | 6.25 | 6.25 | 6.25 | 6.25 | 100.00 |
| 交叉口场景4 | 100.00 | 0.00 | 0.00 | 0.00 | 0.00 | 100.00 |
DownLoad:
CSV
(4) This article mainly studies the interaction scenarios of open roads and signalized intersections in urban transportation environments. Subsequent research can be extended to more comprehensive typical interaction scenarios such as urban expressways and ramps, further considering and analyzing the impact of abnormal positioning and transmission devices on trustworthy interactions.
| [1] |
CHEN Wei, GUO Fang-zhou, WANG Fei-yue. A survey of traffic data visualization[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(6): 2970-2984. doi: 10.1109/TITS.2015.2436897
|
| [2] |
YAO De-zhong, YU Chen, YANG L T, et al. Using crowdsourcing to provide QoS for mobile cloud computing[J]. IEEE Transactions on Cloud Computing, 2019, 7(2): 344-356. doi: 10.1109/TCC.2015.2513390
|
| [3] |
MA Yong-jie, CHENG Shi-sheng, MA Yun-ting, et al. Review of convolutional neural network and its application in intelligent transportation system[J]. Journal of Traffic and Transportation Engineering, 2021, 21(4): 48-71. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2021.04.003
|
| [4] |
LI Wen-jia, SONG Hou-bing. ART: an attack-resistant trust management scheme for securing vehicular ad hoc networks[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(4): 960-969. doi: 10.1109/TITS.2015.2494017
|
| [5] |
LU Zhao-jun, QU Gang, LIU Zheng-lin. A survey on recent advances in vehicular network security, trust, and privacy[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(2): 760-776. doi: 10.1109/TITS.2018.2818888
|
| [6] |
ZHANG Yi, YAO Dan-ya, LI Li, et al. Technologies and applications for intelligent vehicle-infrastructure cooperation systems[J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21(5): 40-51. (in Chinese) doi: 10.16097/j.cnki.1009-6744.2021.05.005
|
| [7] |
DENG Ruo-qi, DI Bo-ya, SONG Ling-yang. Cooperative collision avoidance for overtaking maneuvers in cellular V2X-based autonomous driving[J]. IEEE Transactions on Vehicular Technology, 2019, 68(5): 4434-4446. doi: 10.1109/TVT.2019.2906509
|
| [8] |
ZHAO Xiang-mo, HUI Fei, SHI Xin, et al. Concept, architecture and challenging technologies of ubiquitous traffic information service system[J]. Journal of Traffic and Transportation Engineering, 2014, 14(4): 105-115. (in Chinese) http://transport.chd.edu.cn/article/id/201404013
|
| [9] |
CHETLUR V V, DHILLON H S. Coverage and rate analysis of downlink cellular vehicle-to-everything (C-V2X) communication[J]. IEEE Transactions on Wireless Communications, 2020, 19(3): 1738-1753. doi: 10.1109/TWC.2019.2957222
|
| [10] |
ALNASSER A, SUN Hong-jian, JIANG Jing. Cyber security challenges and solutions for V2X communications: a survey[J]. Computer Networks, 2019, 151: 52-67. doi: 10.1016/j.comnet.2018.12.018
|
| [11] |
AL-SULTAN S, Al-DOORI M M, AL-BAYATTI A H, et al. A comprehensive survey on vehicular ad hoc network[J]. Journal of Network and Computer Applications, 2014, 37: 380-392. doi: 10.1016/j.jnca.2013.02.036
|
| [12] |
SHANGGUAN Wei, SHI Bin, CAI Bai-gen, et al. Optimization of channel access protocols and performance evaluation in cooperative vehicle infrastructure environment[J]. Journal of Transportation Systems Engineering and Information Technology, 2016, 16(6): 47-53. (in Chinese) doi: 10.3969/j.issn.1009-6744.2016.06.008
|
| [13] |
GHOSAL A, CONTI M. Security issues and challenges in V2X: a survey[J]. Computer Networks, 2020, 169: 107093. doi: 10.1016/j.comnet.2019.107093
|
| [14] |
CAI Bai-gen, WANG Cong-cong, SHANGGUAN Wei, et al. Simulation method of information interaction in CVIS[J]. Journal of Traffic and Transportation Engineering, 2014, 14(3): 111-119. (in Chinese) doi: 10.3969/j.issn.1671-1637.2014.03.020
|
| [15] |
LI Teng-long, HUI Fei, ZHAO Xiang-mo, et al. Modelling heterogeneous traffic dynamics by considering the influence of V2V safety messages[J]. IET Intelligent Transport Systems, 2020, 14(4): 220-227. doi: 10.1049/iet-its.2019.0361
|
| [16] |
RAWAT D B, POPESCU D C, YAN Gong-jun, et al. Enhancing VANET performance by joint adaptation of transmission power and contention window size[J]. IEEE Transactions on Parallel and Distributed Systems, 2011, 22(9): 1528-1535. doi: 10.1109/TPDS.2011.41
|
| [17] |
LIU Yun-lu, PU Ju-hua, FANG Wei-wei, et al. A MAC layer optimization algorithm in wireless sensor networks[J]. Chinese Journal of Computers, 2012, 35(3): 529-539. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSJX201203012.htm
|
| [18] |
TAN Shuai-shuai, LI Xiao-ping, DONG Qing-kuai. Trust based routing mechanism for securing OSLR-based MANET[J]. Ad Hoc Networks, 2015, 30: 84-98. doi: 10.1016/j.adhoc.2015.03.004
|
| [19] |
VIJAYAKUMAR P, AZEES M, KANNAN A, et al. Dual authentication and key management techniques for secure data transmission in vehicular ad hoc networks[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(4): 1015-1028. doi: 10.1109/TITS.2015.2492981
|
| [20] |
VIJAYAKUMAR P, AZEES M, CHANG V, et al. Computationally efficient privacy preserving authentication and key distribution techniques for vehicular ad hoc networks[J]. Cluster Computing, 2017, 20(3): 2439-2450. doi: 10.1007/s10586-017-0848-x
|
| [21] |
AZEES M, VIJAYAKUMAR P, DEBOARH L J. EAAP: efficient anonymous authentication with conditional privacy-preserving scheme for vehicular ad hoc networks[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(9): 2467-2476. doi: 10.1109/TITS.2016.2634623
|
| [22] |
JI Yi-mu, LU Yi-cheng, LIU Shang-dong, et al. HIBE-MPJ: cross-domain communication mechanism based on HIBE in Internet of things environment[J]. Journal of Nanjing University of Posts and Telecommunications (Natural Science Edition), 2020, 40(4): 1-10. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NJYD202004001.htm
|
| [23] |
ZHENG Ming-hui, DUAN Yang-yang, LYU Han-xiao. Research on identity authentication protocol group signature-based in Internet of vehicles[J]. Advanced Engineering Sciences, 2018, 50(4): 130-134. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SCLH201804017.htm
|
| [24] |
YANG Xue-ting, LI Zhong. Identity authentication scheme based on vehicle behavior prediction for IoV[J]. Computer Engineering, 2021, 47(1): 129-138. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSJC202101018.htm
|
| [25] |
VUKADINOVIC V, BAKOWSKI K, MARSCH P, et al. 3GPP C-V2X and IEEE 802.11p for vehicle-to-vehicle communications in highway platooning scenarios[J]. Ad Hoc Networks, 2018, 74: 17-29.
|
| [26] |
SHAIKH R A, ALZAHRANI A S. Intrusion-aware trust model for vehicular ad hoc networks[J]. Security and Communication Networks, 2014, 7(11): 1652-1669.
|
| [27] |
ARSHAD M, ULLAH Z, AHMAD N, et al. A survey of local/cooperative-based malicious information detection techniques in VANETs[J]. EURASIP Journal on Wireless Communications and Networking, 2018, 2018: 62.
|
| [28] |
KIM T H J, STUDER A, DUBEY R, et al. VANET alert endorsement using multi-source filters[C]//ACM. Proceedings of the Seventh ACM International Workshop on Vehicular Internetworking. New York: ACM, 2010: 51-60.
|
| [29] |
YAO Xuan-xia, ZHANG Xin-lei, NING Huan-sheng, et al. Using trust model to ensure reliable data acquisition in VANETs[J]. Ad Hoc Networks, 2017, 55: 107-118.
|
| [30] |
LIU Ji-zhao, DONG Yue-jun. False messages detection method based on spatial inference in Internet of vehicles[J]. Computer Engineering and Design, 2020, 41(12): 35-39. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SJSJ202012005.htm
|
| [31] |
MUHAMMAD M, SAFDAR G A. Survey on existing authentication issues for cellular-assisted V2X communication[J]. Vehicular Communications, 2018, 12: 50-65.
|
| [1] | SHI Yu-chen, YAN Song, YAO Dan-ya, ZHANG Yi. SVM-LSTM-based car-following behavior recognition and information credibility discirmination[J]. Journal of Traffic and Transportation Engineering, 2022, 22(3): 115-125. doi: 10.19818/j.cnki.1671-1637.2022.03.009 |
| [2] | ZHANG Yi, PEI Hua-xin, YAO Dan-ya. Research review on cooperative decision-making for vehicle swarms in vehicle-infrastructure cooperative environment[J]. Journal of Traffic and Transportation Engineering, 2022, 22(3): 1-18. doi: 10.19818/j.cnki.1671-1637.2022.03.001 |
| [3] | WANG Run-min, ZHANG Xin-rui, ZHAO Xiang-mo, WU Xia, FAN Hai-jin. Vehicle-infrastructure cooperative control method of connected and signalized intersection in mixed traffic environment[J]. Journal of Traffic and Transportation Engineering, 2022, 22(3): 139-151. doi: 10.19818/j.cnki.1671-1637.2022.03.011 |
| [4] | LI Rui, RAN Bin, QU Xu. Traffic capacity enhancement strategy for urban expressway diversion area under vehicle-infrastructure cooperative environment[J]. Journal of Traffic and Transportation Engineering, 2022, 22(3): 126-138. doi: 10.19818/j.cnki.1671-1637.2022.03.010 |
| [5] | SHANGGUAN Wei, PANG Xiao-yu, LI Qiu-yan, CHAI Lin-guo. Guidance and cooperative operation method for group vehicles in vehicle-infrastructure cooperative environment[J]. Journal of Traffic and Transportation Engineering, 2022, 22(3): 68-78. doi: 10.19818/j.cnki.1671-1637.2022.03.005 |
| [6] | QIU Wei-zhi, SHANGGUAN Wei, CHAI Lin-guo, CHU Duan-feng. Multi-scale filtering synchronization method for vehicle-infrastructure cooperative twin-simulation testing[J]. Journal of Traffic and Transportation Engineering, 2022, 22(3): 199-209. doi: 10.19818/j.cnki.1671-1637.2022.03.016 |
| [7] | SHANGGUAN Wei, LI Xin, CHAI Lin-guo, CAO Yue, CHEN Jing-jing, PANG Hao-jie, RUI Tao. Research review on simulation and test of mixed traffic swarm in vehicle-infrastructure cooperative environment[J]. Journal of Traffic and Transportation Engineering, 2022, 22(3): 19-40. doi: 10.19818/j.cnki.1671-1637.2022.03.002 |
| [8] | ZHAO Tong, SHANGGUAN Wei, CHAI Lin-guo, GUO Peng. Scenario factor analysis and test case generation for vehicle-infrastructure cooperative mixed traffic[J]. Journal of Traffic and Transportation Engineering, 2022, 22(3): 263-276. doi: 10.19818/j.cnki.1671-1637.2022.03.021 |
| [9] | LIN Yong-jie, HUANG Zi-lin, WU Pan, XU Lun-hui. RSSI positioning method of vehicles in tunnels based on semi-supervised extreme learning machine[J]. Journal of Traffic and Transportation Engineering, 2021, 21(2): 243-255. doi: 10.19818/j.cnki.1671-1637.2021.02.021 |
| [10] | WU Yi-ping, LI Hai-jian, ZHAO Xiao-hua, XING Guan-yang, CHEN Yu-fei, FU Qiang. Effect of fog weather warning system under cooperative vehicle infrastructure on vehicle operating eco-characteristics[J]. Journal of Traffic and Transportation Engineering, 2021, 21(4): 259-268. doi: 10.19818/j.cnki.1671-1637.2021.04.020 |
| [11] | YANG Min, WANG Li-chao, ZHANG Jian, RAN Bin, WU Jing-xian. Collaborative method of vehicle conflict resolution in merging area for intelligent expressway[J]. Journal of Traffic and Transportation Engineering, 2020, 20(3): 217-224. doi: 10.19818/j.cnki.1671-1637.2020.03.020 |
| [12] | HE Yun-zhu, YANG Zhong-zhen. Optimization of express distribution by cooperatively using private trucks and buses[J]. Journal of Traffic and Transportation Engineering, 2017, 17(6): 97-103. |
| [13] | HE Zhao-cheng, ZHOU Ya-qiang, YU Zhi. Regional traffic state evaluation method based on data visualization[J]. Journal of Traffic and Transportation Engineering, 2016, 16(1): 133-140. doi: 10.19818/j.cnki.1671-1637.2016.01.016 |
| [14] | SHANGGUAN Wei, GUO Hong-qian, LIU Peng-hui, CAI Bo-gen, WANG Jian. Visual simulation model of CVIS[J]. Journal of Traffic and Transportation Engineering, 2015, 15(3): 118-126. doi: 10.19818/j.cnki.1671-1637.2015.03.014 |
| [15] | CAI Bo-gen, WANG Cong-cong, SHANGGUAN Wei, ZHANG Shu-zhong. Simulation method of information interaction in CVIS[J]. Journal of Traffic and Transportation Engineering, 2014, 14(3): 111-119. |
| [16] | DONG Chun-jiao, SHAO Chun-fu, MA Zhuang-lin, ZHUGE Cheng-xiang, LI Yang-yang. Temporal-spacial characteristic of urban expressway under jam flow condition[J]. Journal of Traffic and Transportation Engineering, 2012, 12(3): 73-79. doi: 10.19818/j.cnki.1671-1637.2012.03.011 |
| [17] | CHEN Tao, WEI Lang, YUAN Wang-fang. Virtual simulation test of perception factors for operating speed[J]. Journal of Traffic and Transportation Engineering, 2008, 8(2): 122-126. |
| [18] | LIU Tian-liang, HUANG Hai-jun, CHEN Jian. Evolution of day-to-day route choice behavior considering risk aversion and perception updating[J]. Journal of Traffic and Transportation Engineering, 2008, 8(4): 90-94. |
| [19] | Wu Qun-qi, Huang Zhi-ying. Analysis of transportation behavior essence and its characteristics[J]. Journal of Traffic and Transportation Engineering, 2007, 7(3): 116-120. |
| [20] | LI Xiu-gang, YANG Xiao-guang, WANG Wei, DENG Xue-jun. Motor Vehicles' Exhaust Emission Factors for Urban Transportation Planning[J]. Journal of Traffic and Transportation Engineering, 2001, 1(4): 87-91. |
| 1. | 陈宁,胡迪均. 基于车路协同的农机信息采集与通信技术应用研究. 农机化研究. 2025(04): 57-64 .  |

Figures(15) / Tables(7)
Copyright《Journal of Traffic and Transportation Engineering》编辑部陕ICP备05001904号-1
Address :Editorial Department of Journal of Traffic and Transportation Engineering, Chang 'an University, Middle Section of South Second Ring Road, Xi 'an, Shaanxi(710064) Tel:029-82334388 Email:jygc@chd.edu.cn
All visit:1713327Today's visit:1044
Supported by:
Beijing Renhe Information Technology Co. Ltd

SHANGGUAN Wei, ZHA Yuan-yuan, FU Yao, ZHENG Si-fa, CHAI Lin-guo. Vehicle-infrastructure cooperative credible interaction method based on traffic business characteristics understanding[J]. Journal of Traffic and Transportation Engineering, 2022, 22(4): 348-360. doi: 10.19818/j.cnki.1671-1637.2022.04.027

| 初始可信等级 | 车辆类型 | 初始信任程度 | λ |
| P1 | 交管车、消防车、警车、救护车 | 可信 | 1.0 |
| P2 | 公交车、出租车、网约车等 | 比较可信 | 0.8 |
| P3 | 城管、水电城市公共设施维修车辆 | 基本可信 | 0.6 |
| P4 | 私人车、单位车等普通车辆 | 不太可信 | 0.4 |
| P5 | 故障、攻击或没进行年检的车等 | 不可信 | 0.2 |
DownLoad:
CSV
| 项目 | 数值 |
| 车辆运行车道数 | 4 |
| 车辆运行长度/m | 300 |
| 车辆长度/m | 4 |
| 行驶车辆数/veh | 100 |
| 最大行驶速度/(km·h-1) | 80 |
| 最小行驶速度/(km·h-1) | 0 |
| 最大加速度/(m·s-2) | 2.5 |
| 最大减速度/(m·s-2) | 9 |
| 初始速度/(km·h-1) | 30 |
DownLoad:
CSV
| 项目 | 数值 |
| 车辆运行车道数 | 4 |
| 车辆运行长度/m | 600 |
| 车辆长度/m | 4 |
| 行驶车辆数/veh | 500 |
| 最大行驶速度/(km·h-1) | 50 |
| 最小行驶速度/(km·h-1) | 0 |
| 最大加速度/(m·s-2) | 2.5 |
| 最大减速度/(m·s-2) | 9 |
| 初始速度/(km·h-1) | 30 |
DownLoad:
CSV
| 推演方法 | 平均绝对相对误差 | 最大绝对相对误差 | ||
| 畅通时段 | 高峰时段 | 畅通时段 | 高峰时段 | |
| 本文方法 | 1.85 | 5.21 | 5.87 | 11.25 |
| 多元非线性拟合 | 1.93 | 5.89 | 5.32 | 12.58 |
DownLoad:
CSV
| 实际类别 | 分类结果 | |
| 无效消息 | 有效消息 | |
| 无效消息 | A1 | A2 |
| 有效消息 | A3 | A4 |
DownLoad:
CSV
| 交通场景 | CAV占比 | AHDV占比 | CHDV占比 | 占比总计 |
| 路段场景1 | 25.0 | 37.5 | 37.5 | 100.0 |
| 路段场景2 | 50.0 | 25.0 | 25.0 | 100.0 |
| 路段场景3 | 75.0 | 12.5 | 12.5 | 100.0 |
| 路段场景4 | 100.0 | 0.0 | 0.0 | 100.0 |
DownLoad:
CSV
| 交通场景 | CAV占比 | HDV1占比 | HDV2占比 | HDV3占比 | HDV4占比 | 占比总计 |
| 交叉口场景1 | 25.00 | 18.75 | 18.75 | 18.75 | 18.75 | 100.00 |
| 交叉口场景2 | 50.00 | 12.50 | 12.50 | 12.50 | 12.50 | 100.00 |
| 交叉口场景3 | 75.00 | 6.25 | 6.25 | 6.25 | 6.25 | 100.00 |
| 交叉口场景4 | 100.00 | 0.00 | 0.00 | 0.00 | 0.00 | 100.00 |
DownLoad:
CSV
| 初始可信等级 | 车辆类型 | 初始信任程度 | λ |
| P1 | 交管车、消防车、警车、救护车 | 可信 | 1.0 |
| P2 | 公交车、出租车、网约车等 | 比较可信 | 0.8 |
| P3 | 城管、水电城市公共设施维修车辆 | 基本可信 | 0.6 |
| P4 | 私人车、单位车等普通车辆 | 不太可信 | 0.4 |
| P5 | 故障、攻击或没进行年检的车等 | 不可信 | 0.2 |
| 项目 | 数值 |
| 车辆运行车道数 | 4 |
| 车辆运行长度/m | 300 |
| 车辆长度/m | 4 |
| 行驶车辆数/veh | 100 |
| 最大行驶速度/(km·h-1) | 80 |
| 最小行驶速度/(km·h-1) | 0 |
| 最大加速度/(m·s-2) | 2.5 |
| 最大减速度/(m·s-2) | 9 |
| 初始速度/(km·h-1) | 30 |
| 项目 | 数值 |
| 车辆运行车道数 | 4 |
| 车辆运行长度/m | 600 |
| 车辆长度/m | 4 |
| 行驶车辆数/veh | 500 |
| 最大行驶速度/(km·h-1) | 50 |
| 最小行驶速度/(km·h-1) | 0 |
| 最大加速度/(m·s-2) | 2.5 |
| 最大减速度/(m·s-2) | 9 |
| 初始速度/(km·h-1) | 30 |
| 推演方法 | 平均绝对相对误差 | 最大绝对相对误差 | ||
| 畅通时段 | 高峰时段 | 畅通时段 | 高峰时段 | |
| 本文方法 | 1.85 | 5.21 | 5.87 | 11.25 |
| 多元非线性拟合 | 1.93 | 5.89 | 5.32 | 12.58 |
| 实际类别 | 分类结果 | |
| 无效消息 | 有效消息 | |
| 无效消息 | A1 | A2 |
| 有效消息 | A3 | A4 |
| 交通场景 | CAV占比 | AHDV占比 | CHDV占比 | 占比总计 |
| 路段场景1 | 25.0 | 37.5 | 37.5 | 100.0 |
| 路段场景2 | 50.0 | 25.0 | 25.0 | 100.0 |
| 路段场景3 | 75.0 | 12.5 | 12.5 | 100.0 |
| 路段场景4 | 100.0 | 0.0 | 0.0 | 100.0 |
| 交通场景 | CAV占比 | HDV1占比 | HDV2占比 | HDV3占比 | HDV4占比 | 占比总计 |
| 交叉口场景1 | 25.00 | 18.75 | 18.75 | 18.75 | 18.75 | 100.00 |
| 交叉口场景2 | 50.00 | 12.50 | 12.50 | 12.50 | 12.50 | 100.00 |
| 交叉口场景3 | 75.00 | 6.25 | 6.25 | 6.25 | 6.25 | 100.00 |
| 交叉口场景4 | 100.00 | 0.00 | 0.00 | 0.00 | 0.00 | 100.00 |

 DownLoad:
DownLoad:

 DownLoad:
DownLoad:













