首页
期刊简介
编委会
期刊在线
网络首发
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
出版伦理
AI使用声明
同行评审及出版流程
投稿模板
版权转让协议
期刊订阅
联系我们
编辑团队
联系方式
English
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
首页
期刊简介
编委会
期刊在线
网络首发
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
出版伦理
AI使用声明
同行评审及出版流程
投稿模板
版权转让协议
期刊订阅
联系我们
编辑团队
联系方式
English
留言板
尊敬的读者、作者、审稿人, 关于本刊的投稿、审稿、编辑和出版的任何问题, 您可以本页添加留言。我们将尽快给您答复。谢谢您的支持!
姓名
邮箱
手机号码
标题
留言内容
验证码
用户中心
作者投稿
作者查询
专家审稿
编辑办公
期刊信息
(2001年创刊 月刊 )
主 管:
中华人民共和国教育部
主 办:
长安大学
编辑出版:
《交通运输工程学报》编辑部
主 编:
沙爱民
地 址:
陕西省 西安市 南二环 路中段 长安大学《交通运输工程学报》编辑部
邮 编:
710064
电 话:
029-82334388
邮 箱:
jygc@chd.edu.cn
国内发行:
中国邮政集团有限公司陕西省报刊发行局
国外发行:
中国国际图书贸易集团有限公司
标准刊号:
ISSN
1671-1637
CN
61-1369/U
CODEN
JYGXAS
学报微信视频号
学报微信公众号
重要源期刊收录
更多>
《交通运输工程学报》收录信息
《铁路运输领域高质量科技期刊分级目录》T1级
《公路运输领域高质量科技期刊分级目录》T1级
美国《工程索引》(Ei Compendex)
《文摘和引文数据库》(Scopus)
日本科学技术振兴机构(JST)中国文献数据库
邮件订阅
RSS
2024年 第24卷 第2期
栏目
综述
交通基础设施工程
载运工具运用工程
交通运输规划与管理
交通信息工程及控制
上一期
|
下一期
选择全部
显示方式:
2024年第24卷第2期封面与目录
封面PDF
目次PDF
综述
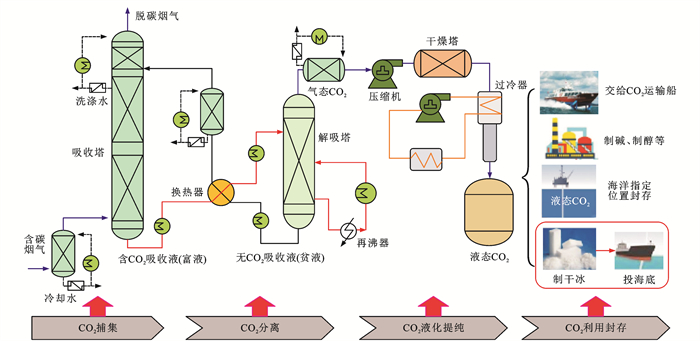
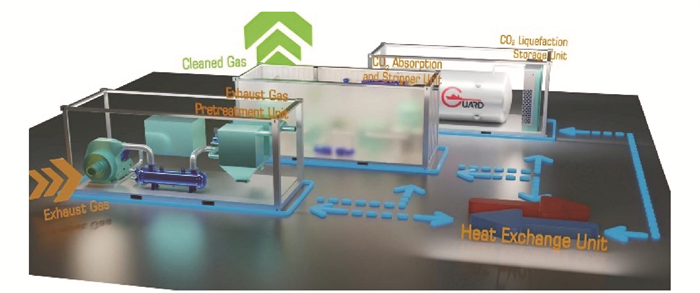
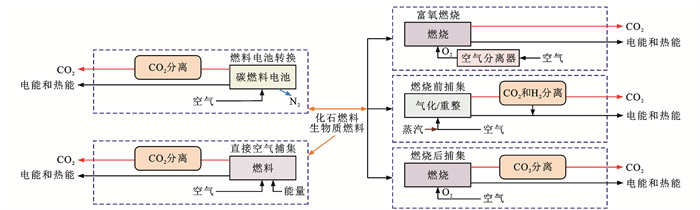
船舶碳捕集、利用与封存技术综述
卢明剑
,
董胜节
,
严新平
,
李珂
,
李晓东
,
周晓
摘要:
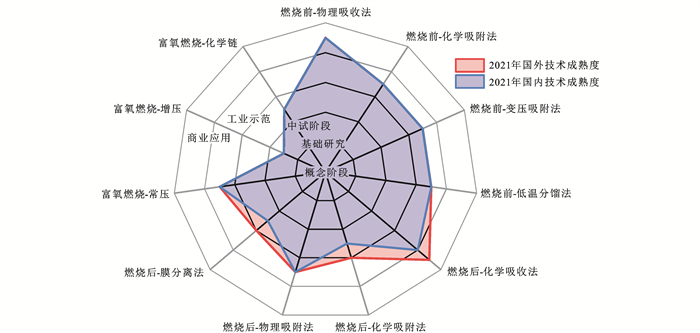
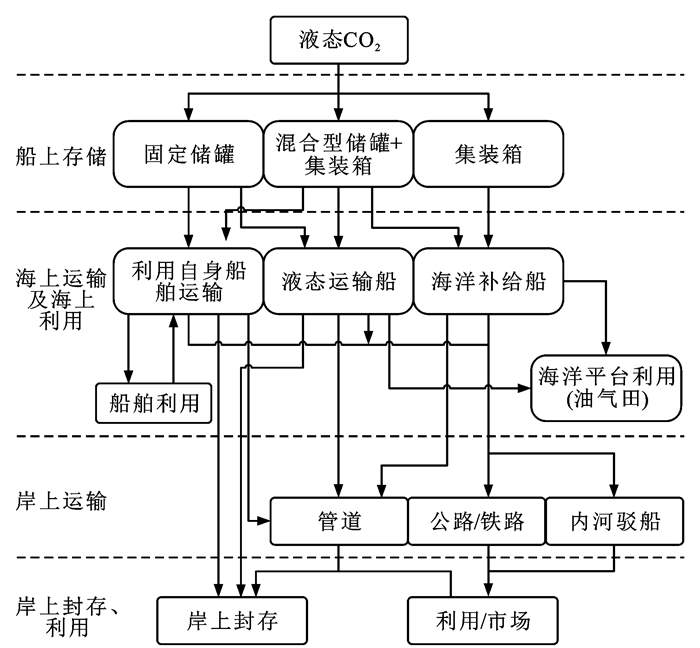
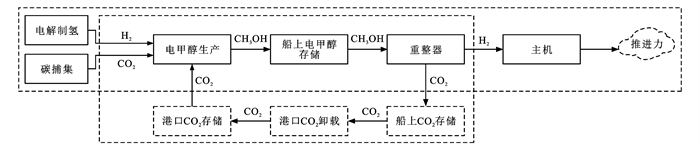
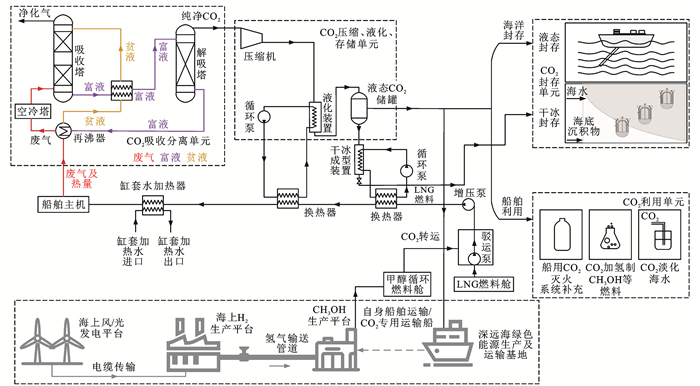
追踪了国内外围绕船舶碳捕集、利用与封存(CCUS)技术开展的研究,梳理了重点内容和主要研究成果;从CCUS不同技术路径的优缺点出发,分析了目前CCUS技术在船舶上的应用可行性;针对发展迅猛的液化天然气船舶,提出了开展CCUS的技术路线;总结了目前船舶CCUS技术存在的问题,针对性地提出了建议,并探讨了船舶CCUS关键技术的发展方向。研究结果表明:船舶CCUS技术可以在短期内显著减排,且适用于营运和新造在内的绝大多数含碳燃料船舶;国外正在积极部署船舶CCUS技术实船验证研究,但国内的研究多处于概念设计与仿真研究阶段;由于改造简单,技术成熟度高且成本低,燃烧后捕集法中的化学吸收法目前最适用于船舶碳捕集,但要解决能耗高和系统尺寸大等问题,需加快探索性能更优良的先进化学溶剂及更具革命性的捕集方法;液态存储是目前最成熟的存储方式,但还需要提升其安全性与经济性;亟需加快构建以大型CO
2
运输船为主的储运方式,推进港口与海洋平台CO
2
转驳、接收的基础设施建设;CO
2
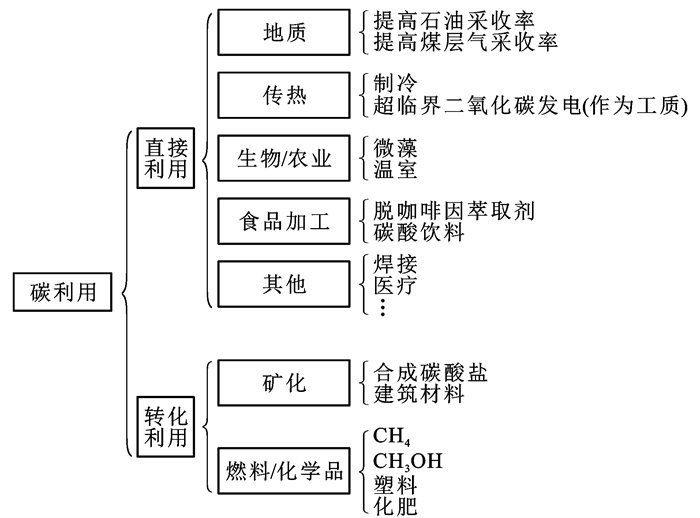
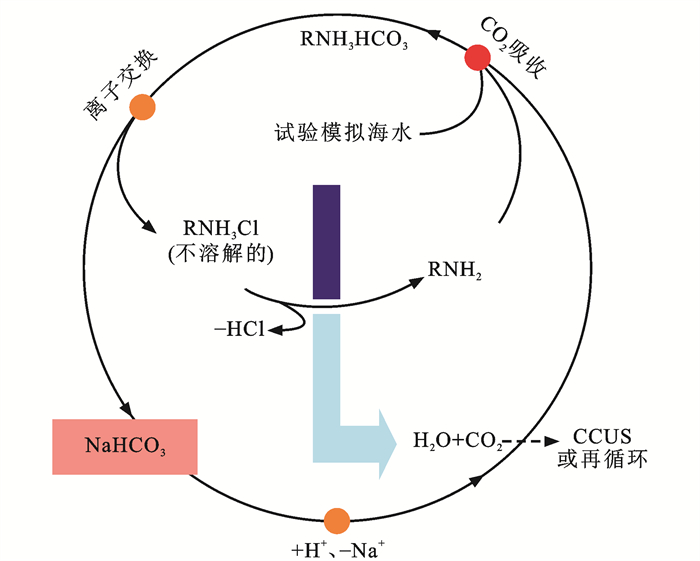
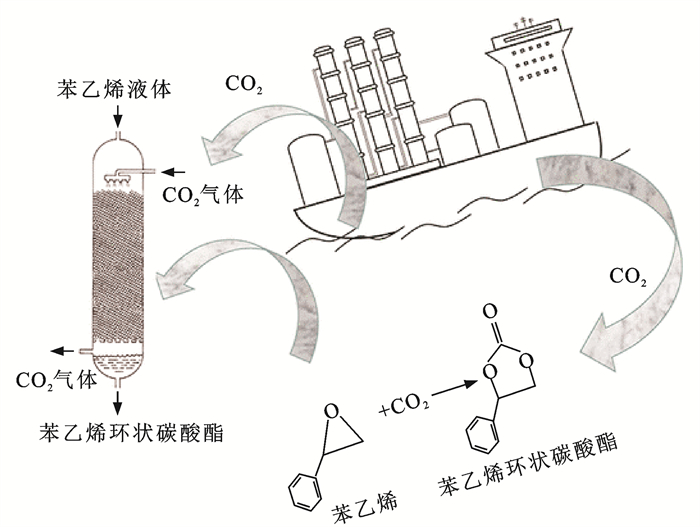
在海洋油气田驱油驱气、淡化海水及能源催化重整等领域应用前景广阔,但船舶CO
2
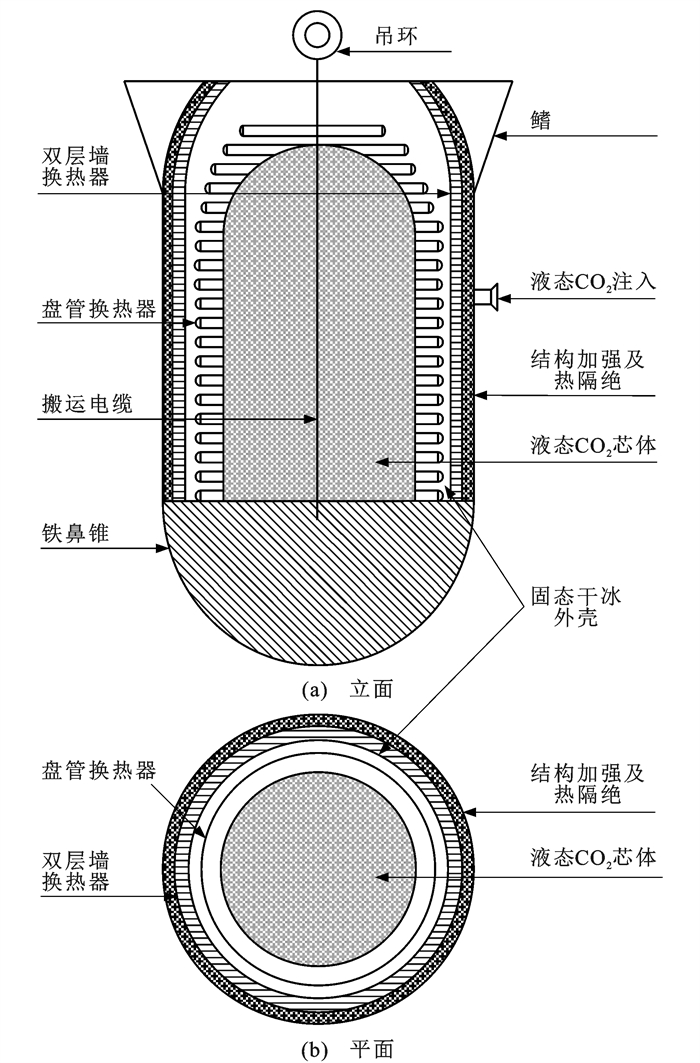
利用技术亟待规模化、产业化和相关产业技术协同发展;将液态CO
2
或干冰进行海洋封存是未来的发展趋势,但亟需完善相关标准和法律法规,推动封存配套装备和技术开发;需要探索出一整套标准化、系统化的碳排放管理模式,推动CCUS技术配套发展,构建完整、绿色、经济、高效的船舶CCUS产业链。
更多>
2024, 24(2): 1-19.
doi:
10.19818/j.cnki.1671-1637.2024.02.001
摘要
(
4463
)
HTML
(
1534
)
PDF (7585KB)
(
355
)
引用
(
)
面向长寿命的既有高速公路沥青路面延寿设计综述
吕松涛
,
赵霈
,
鲁巍巍
,
彭幸海
,
王金平
,
陈淇
,
雷伟
,
蒲昌瑜
摘要:
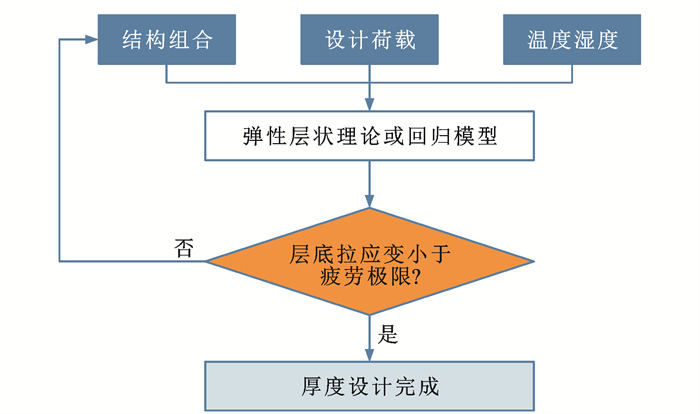
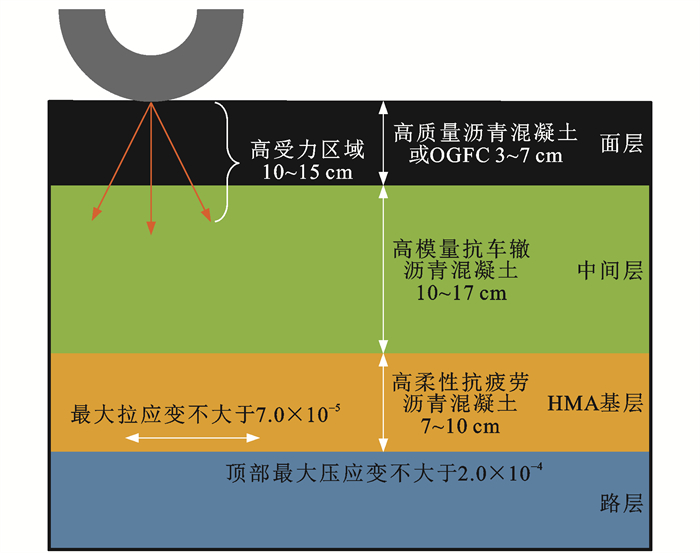
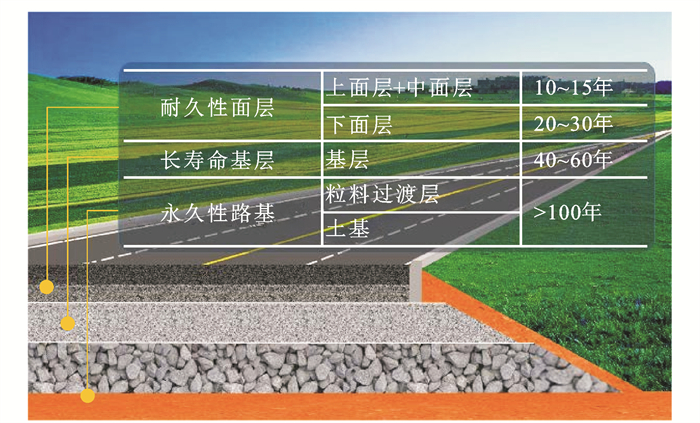
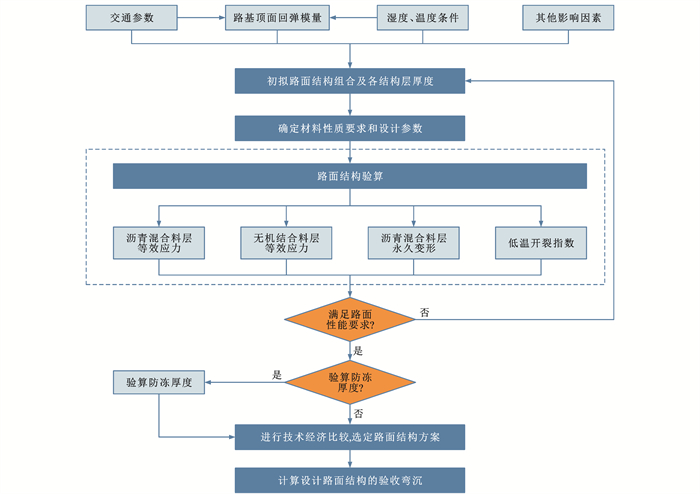
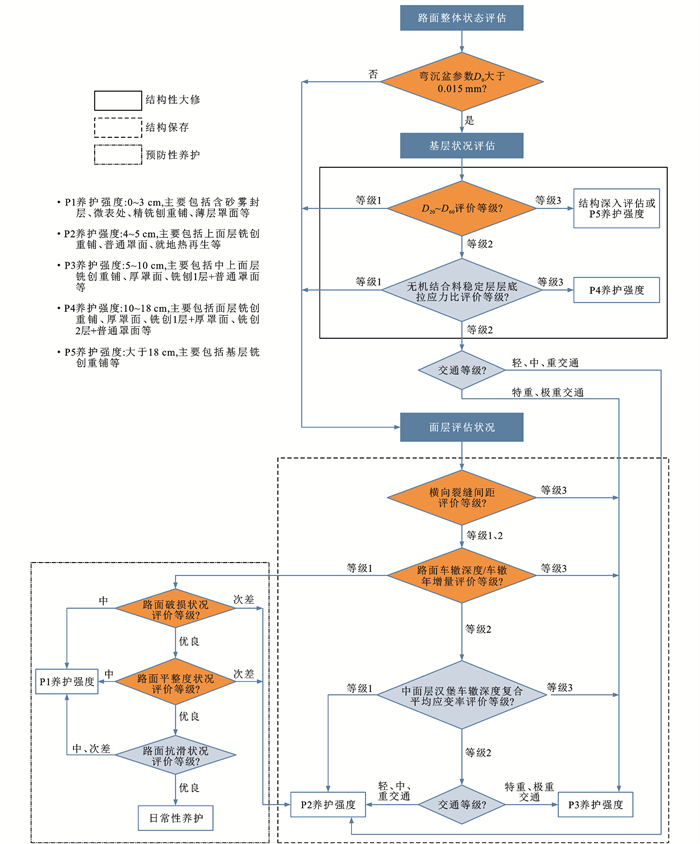
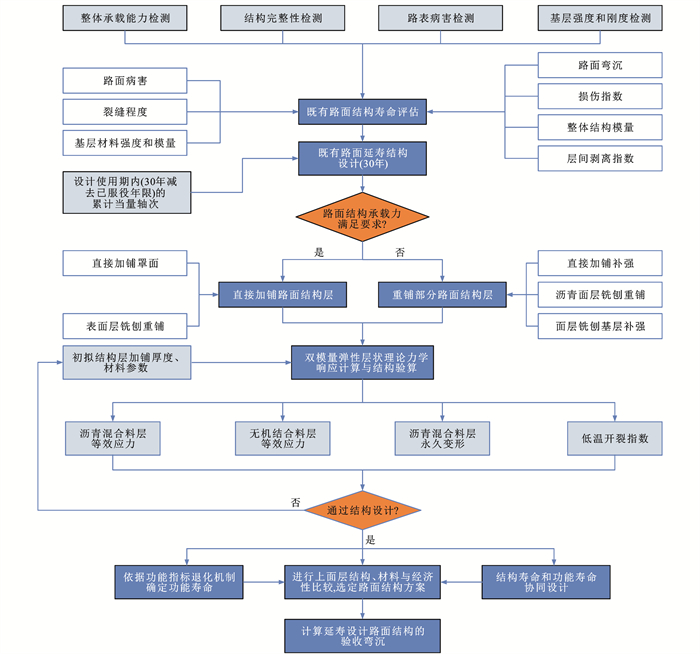
面向中国长寿命公路建设工程的需求,介绍了中国、美国和欧洲各国长寿命沥青路面的基本概念和发展历程,总结了中国和欧美国家长寿命沥青路面设计理论与方法的研究和发展现状,梳理了欧美国家既有沥青路面检测与评价、延寿处治设计方法,论述了中国典型既有沥青路面延寿设计方法的研究与发展现状,对比分析了不同新建道路长寿命设计方法和既有沥青路面延寿设计方法的优缺点和适用性。研究结果表明:目前尚未形成统一的长寿命沥青路面设计标准,研究与应用仍处于发展完善阶段,长寿命沥青路面依旧是未来路面领域的研究热点;耦合交通与环境因素,建立多指标控制的长寿命沥青路面设计体系是今后应重点研究的方向;长寿命沥青路面结构设计在今后将向非线性、多维度、概率型和动态化转变;基于结构层寿命逐层递增的长寿命沥青路面延寿设计方法可使沥青路面结构使用年限翻一番,相关工作可为既有沥青路面延寿设计方法和体系的构建及应用提供有价值的参考和见解,以满足中国长寿命公路建设工程发展需求;既有沥青路面延寿设计是道路工程可持续发展的重要课题,未来应加强长寿命沥青路面技术的研究和推广,提高路面的综合质量,满足不断增长的道路运输需求,为建设优质、高效、绿色、安全的交通基础设施做出更大贡献。
更多>
2024, 24(2): 20-49.
doi:
10.19818/j.cnki.1671-1637.2024.02.002
摘要
(
4049
)
HTML
(
1521
)
PDF (13385KB)
(
352
)
引用
(
)
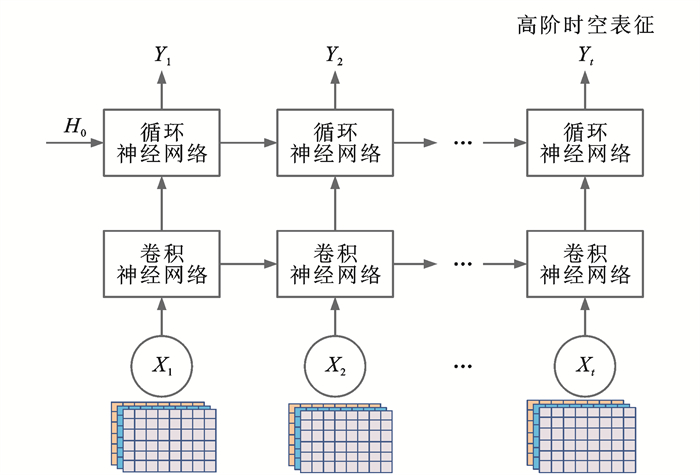
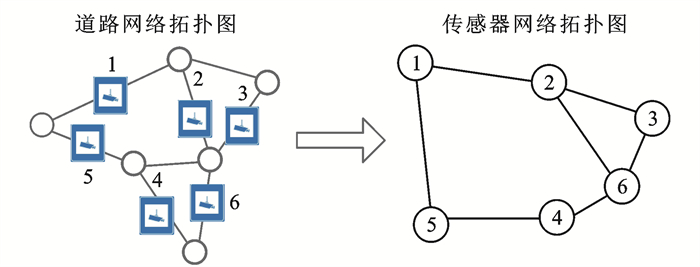
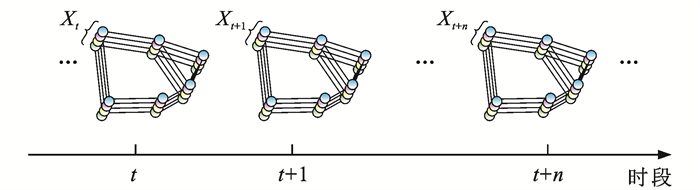
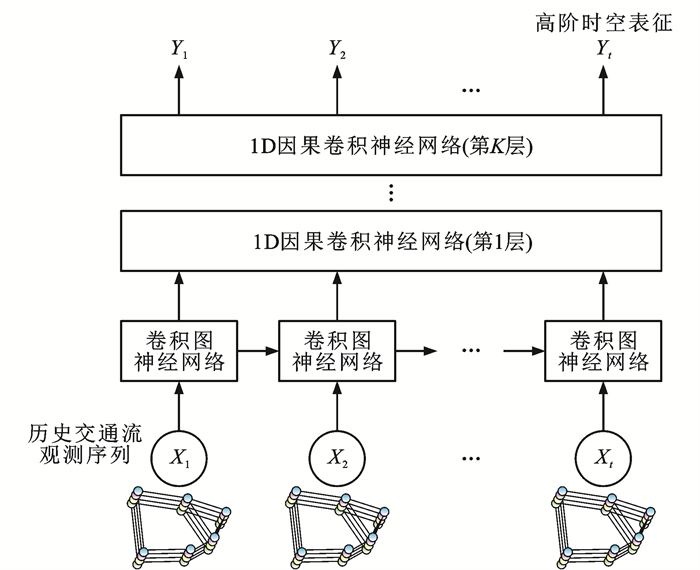
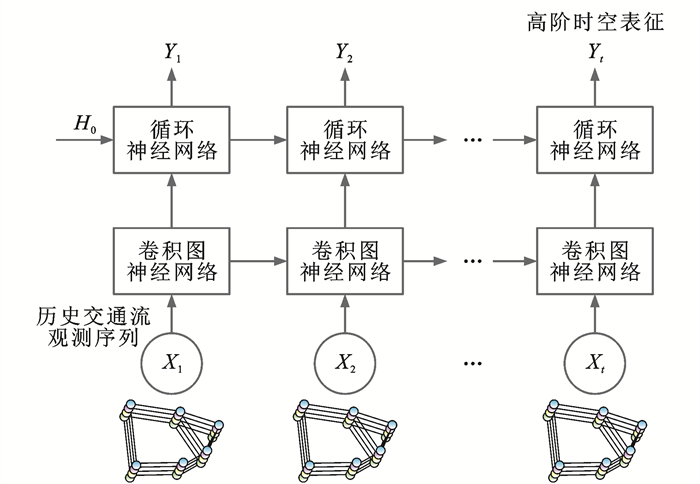
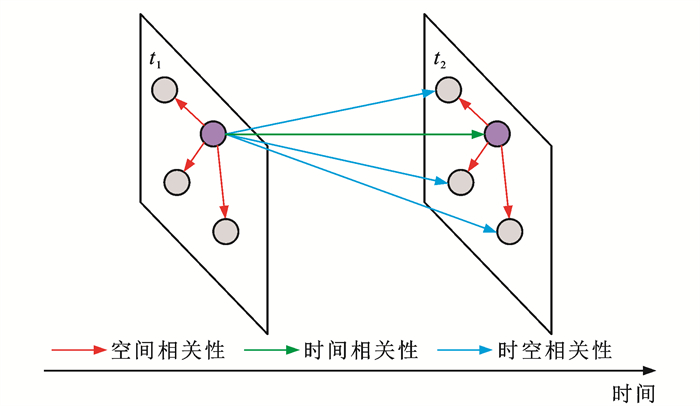
基于深度学习的短期交通流预测方法综述
崔建勋
,
要甲
,
赵泊媛
摘要:
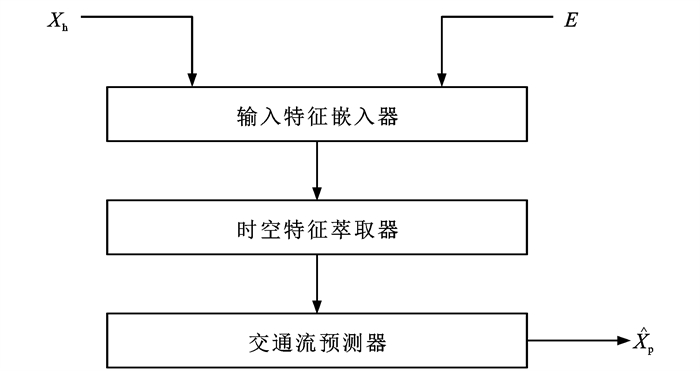
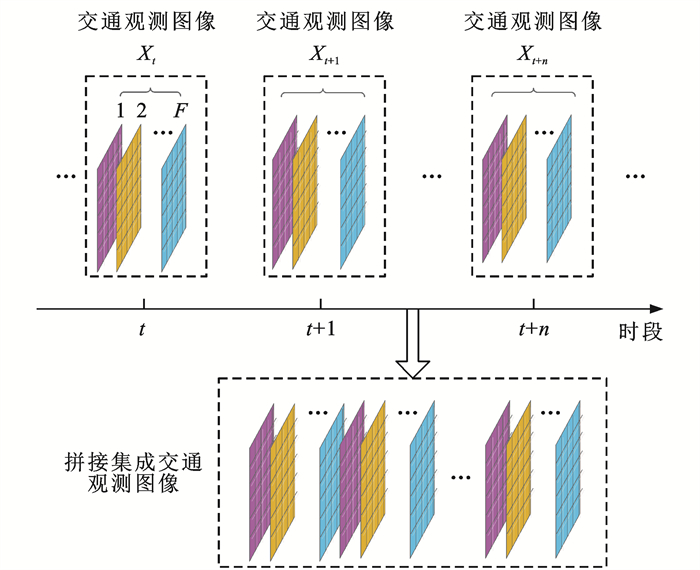
针对基于深度学习的短期交通流预测问题,揭示了时空相关性建模本质,分析了建模过程中涉及的多尺度时空特性、异质性、动态性、非线性等特点,明确了基于深度学习进行短期交通流预测的核心挑战,阐述了短期交通流预测涉及的外部信息整合、多步预测与单步预测以及单体预测与集成预测等相关问题;按照网格化和拓扑化2种交通流数据组织方式,分别综述了当前最新的基于深度学习的短期交通流预测研究方向。研究结果表明:针对网格化交通流数据,当前研究主要包含了基于2D图像卷积神经网络、基于2D图像卷积神经网络与循环神经网络相结合、基于3D图像卷积神经网络3种预测建模方法;针对拓扑化交通流数据,当前研究主要包含了基于1D因果图像卷积与卷积图神经网络相结合、基于循环神经网络与卷积图神经网络相结合、基于自注意力与卷积图神经网络相结合、基于卷积图神经网络的时空同步学习4种预测建模方法;总体上,基于深度学习方法进行短期交通流预测相较于采用时间序列和经典机器学习方法获得了预测准确性上的极大提升;未来,针对物理理论、知识图谱与深度学习相结合,构建多时空数据挖掘大模型以及轻量化、可解释性、模型结构自动化搜索等维度的相关探索将成为重要研究方向。
更多>
2024, 24(2): 50-64.
doi:
10.19818/j.cnki.1671-1637.2024.02.003
摘要
(
6594
)
HTML
(
1795
)
PDF (3612KB)
(
674
)
引用
(
)
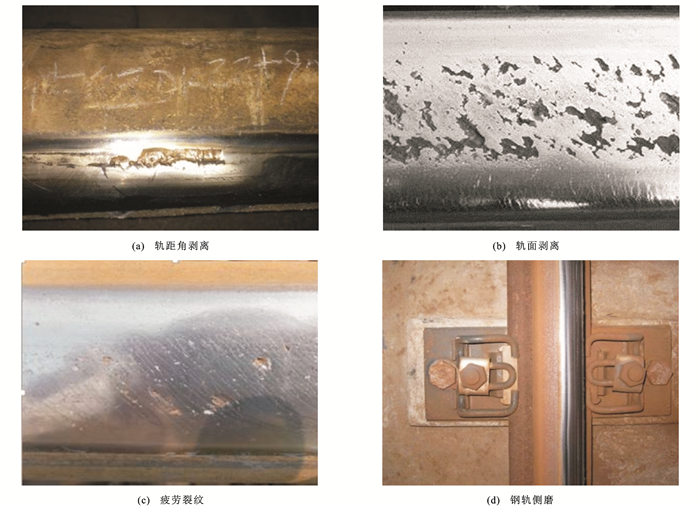
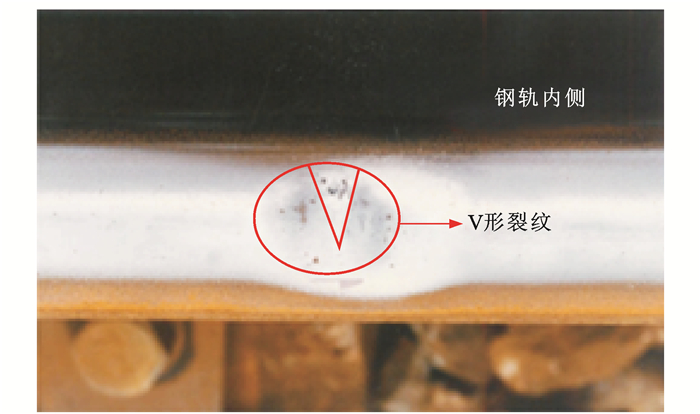
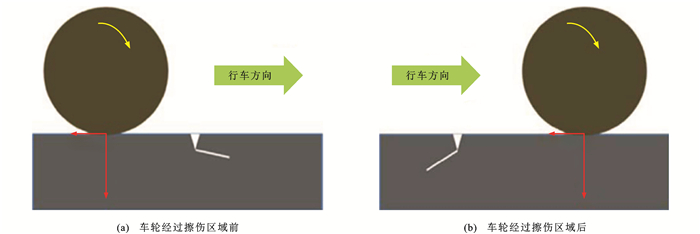
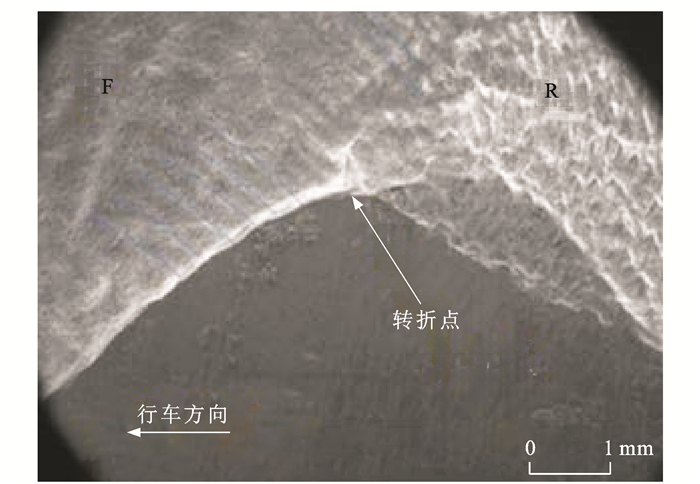
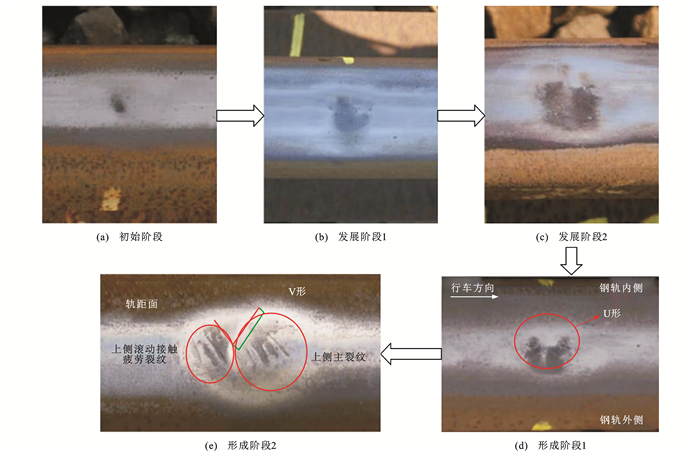
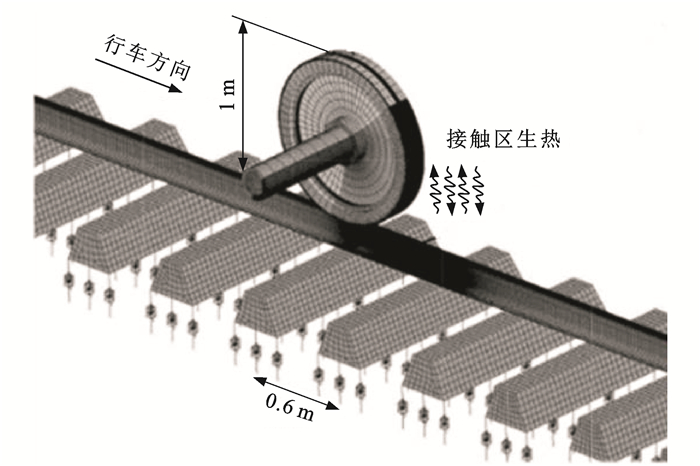
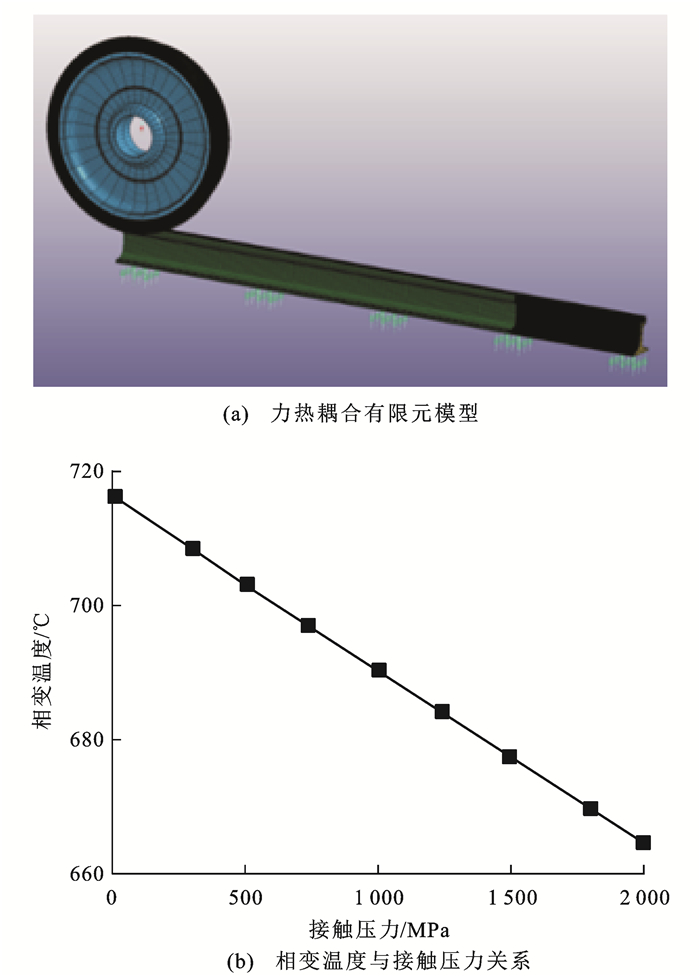
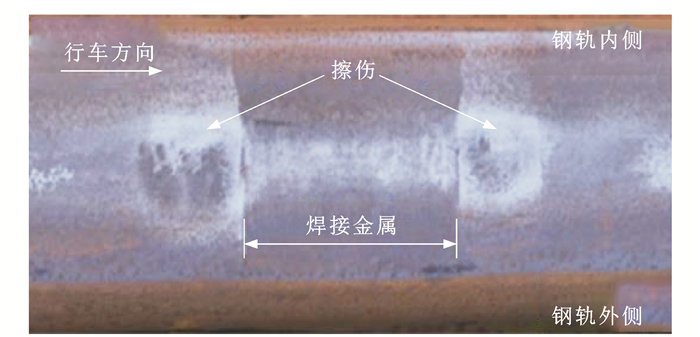
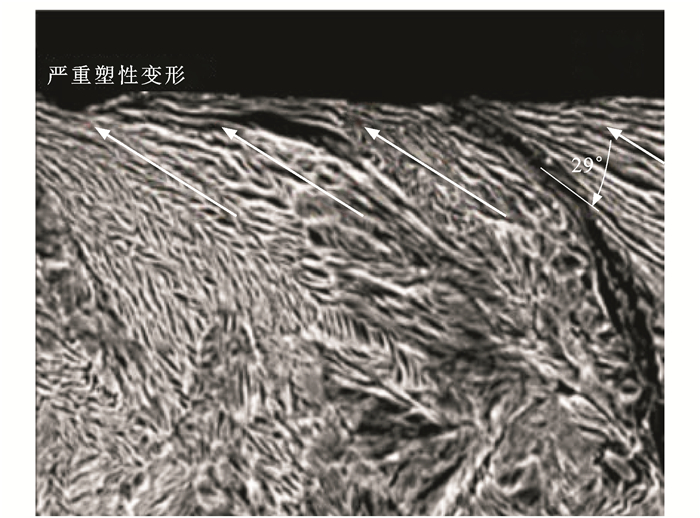
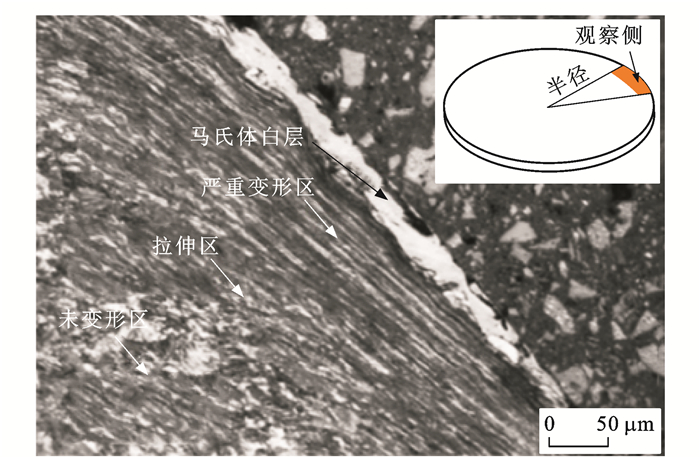
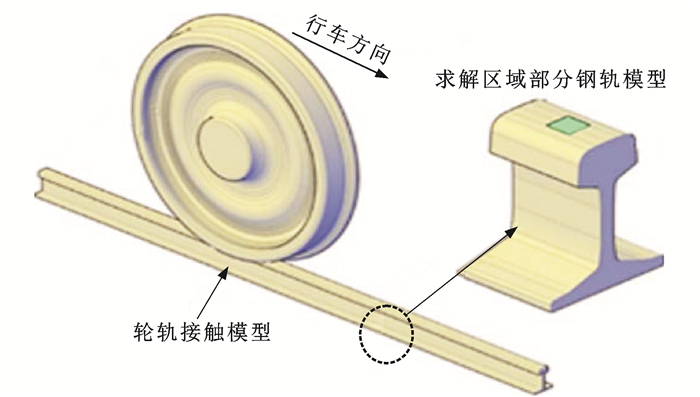
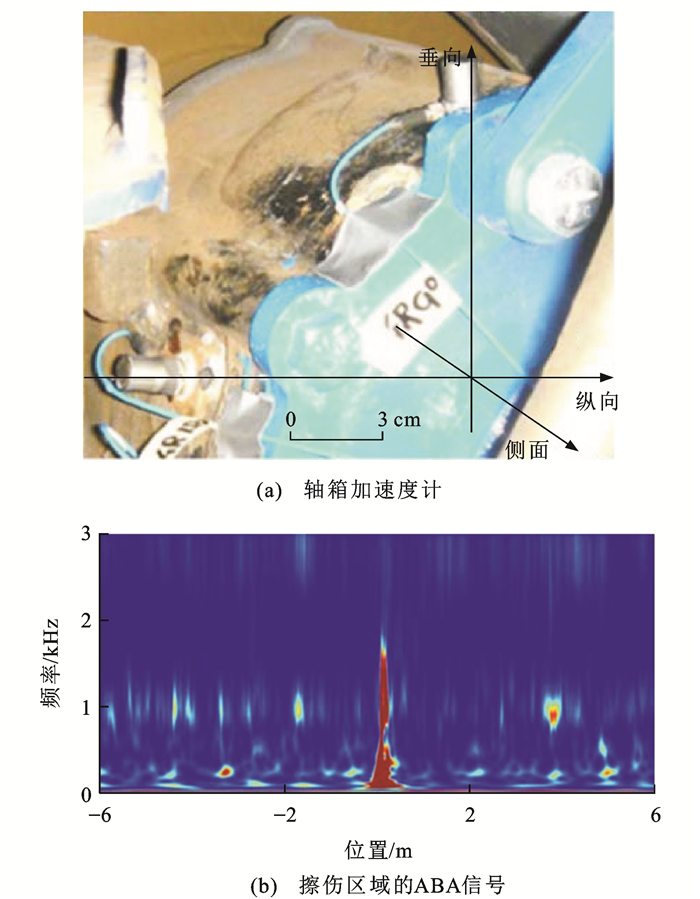
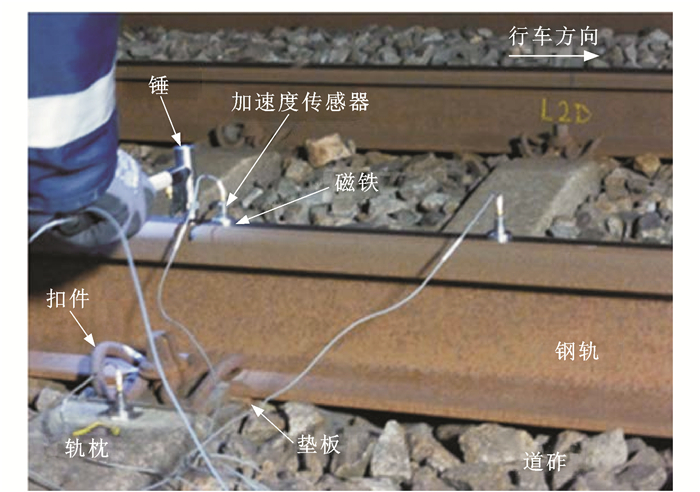
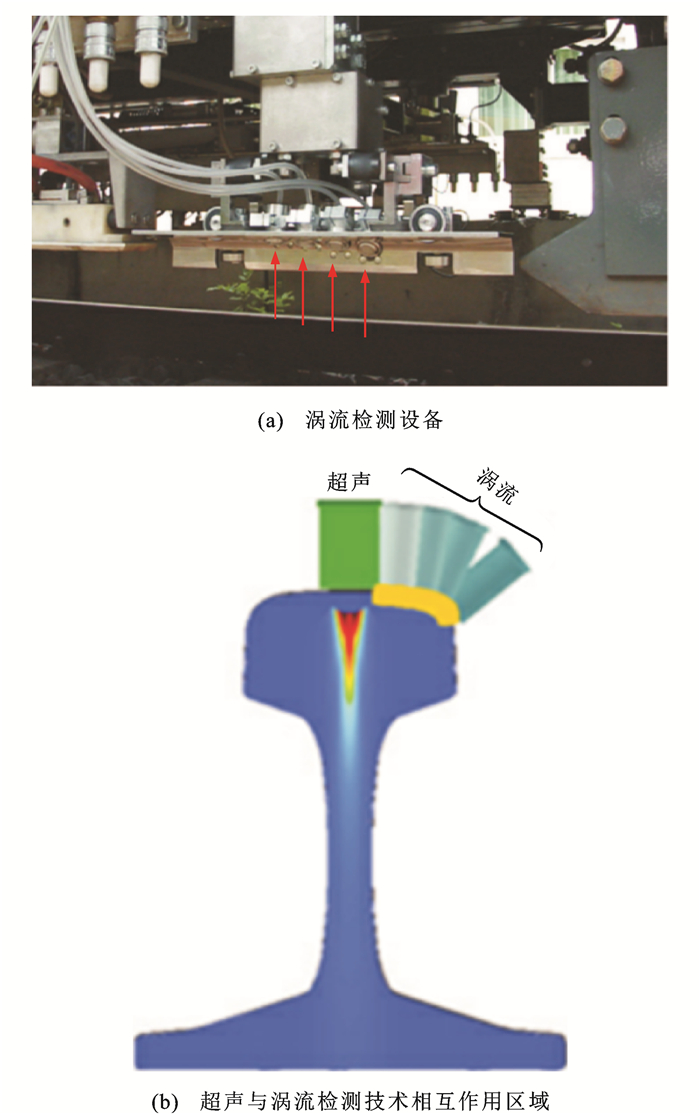
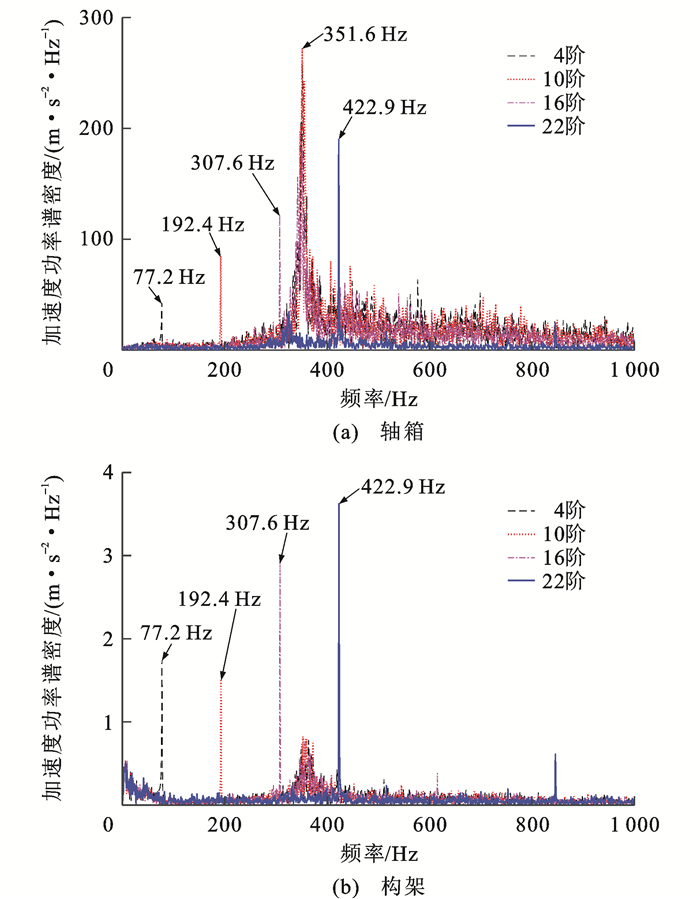
钢轨擦伤形成机理、检测与防治综述
侯博文
,
乔林川
,
高亮
,
秦家栋
,
刘秀波
,
马超智
摘要:
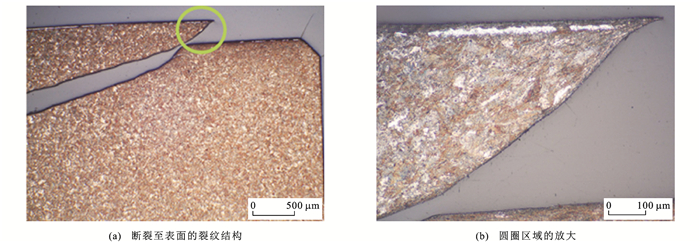
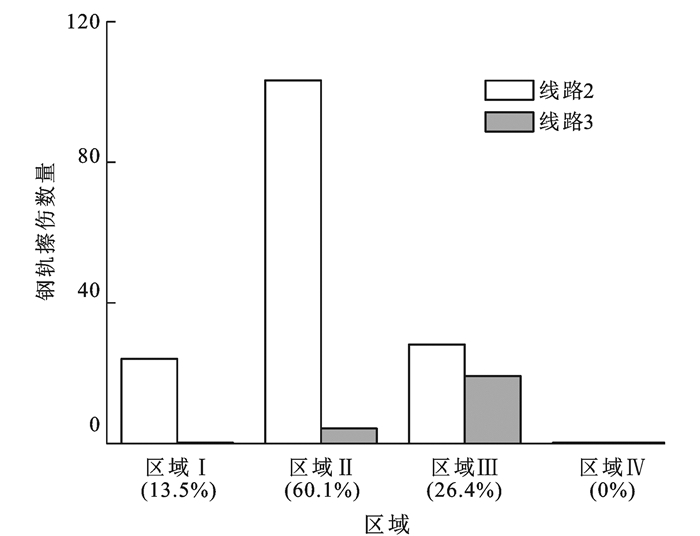
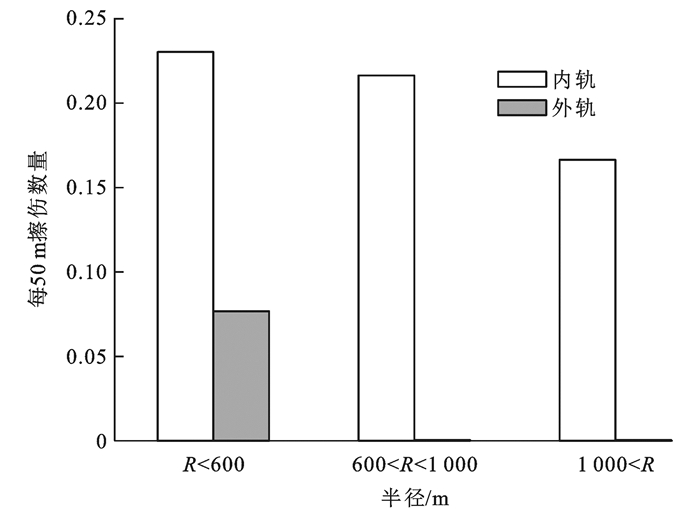
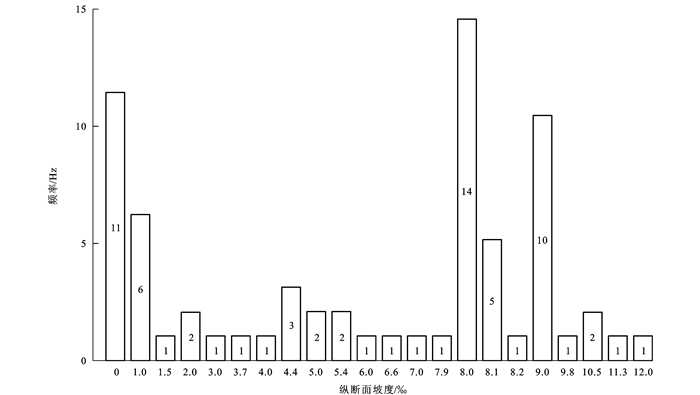
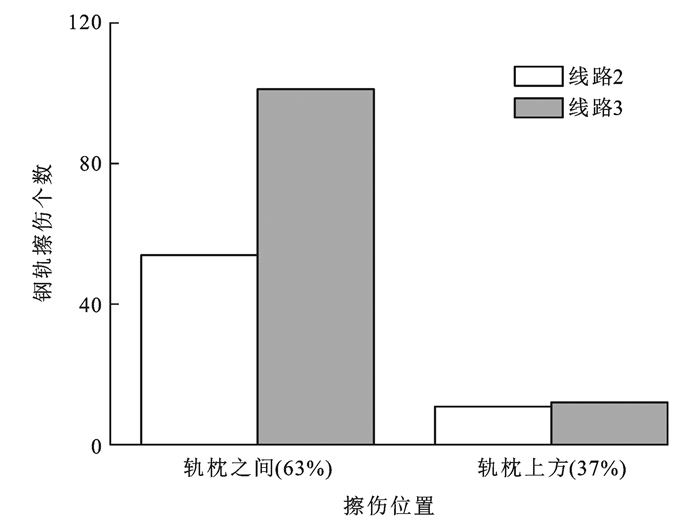
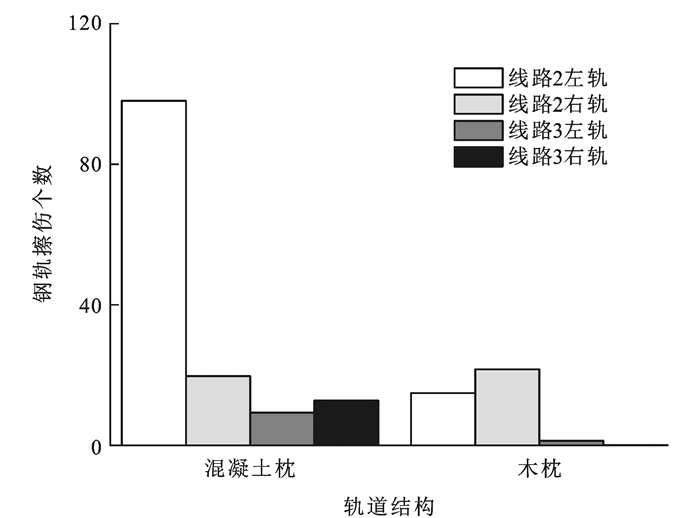
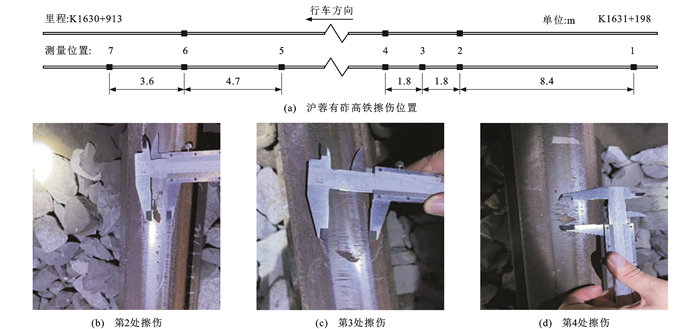
针对铁路运营过程中存在的钢轨擦伤问题,从擦伤的深度、裂纹扩展角度、尺寸等方面总结了擦伤的具体形态特征,论述了钢轨擦伤的扩展过程;系统分析了钢轨擦伤的形成机理,从塑性变形和热致相变2个成因角度分析了轮轨接触压力、接触区应力应变、接触区温度变化在擦伤形成过程中的作用机制;从机车车辆性能、线路参数、轨道类型等方面明确了影响钢轨擦伤发展的主要因素;调研了基于轴箱加速度等不同方式的钢轨擦伤现场检测方法,对比分析了各种方法在擦伤检测方面的适用性;结合擦伤的形成机理与影响因素,从车辆牵引/制动控制、钢轨打磨等角度分析了擦伤防治的有效措施与策略。研究结果表明:目前对于钢轨擦伤形成机理及发展过程的研究主要采用现场调研、样本试验模拟和数值仿真等手段;由轮轨之间的大蠕滑、滑动状态所引起的钢轨母材极限变形、热致相变是钢轨擦伤形成的主要原因,列车运行状态、线路平纵断面参数和线下基础类型等因素会影响轮轨之间的接触状态,从而诱发擦伤的形成和发展;按照钢轨擦伤的检测方式划分,目前主要可采用轴箱加速度响应法、频响函数法与涡流探测法等,但各类检测方法的精度对于不同程度的擦伤有一定差别;针对钢轨擦伤的防治方面,在擦伤形成之前,控制列车牵引/制动过程中的轮轨黏着超限对于预防擦伤较为有效,在擦伤形成后,根据擦伤的不同程度可通过分级打磨或换轨等方式来降低安全隐患。
更多>
2024, 24(2): 65-84.
doi:
10.19818/j.cnki.1671-1637.2024.02.004
摘要
(
3061
)
HTML
(
1017
)
PDF (26120KB)
(
215
)
引用
(
)
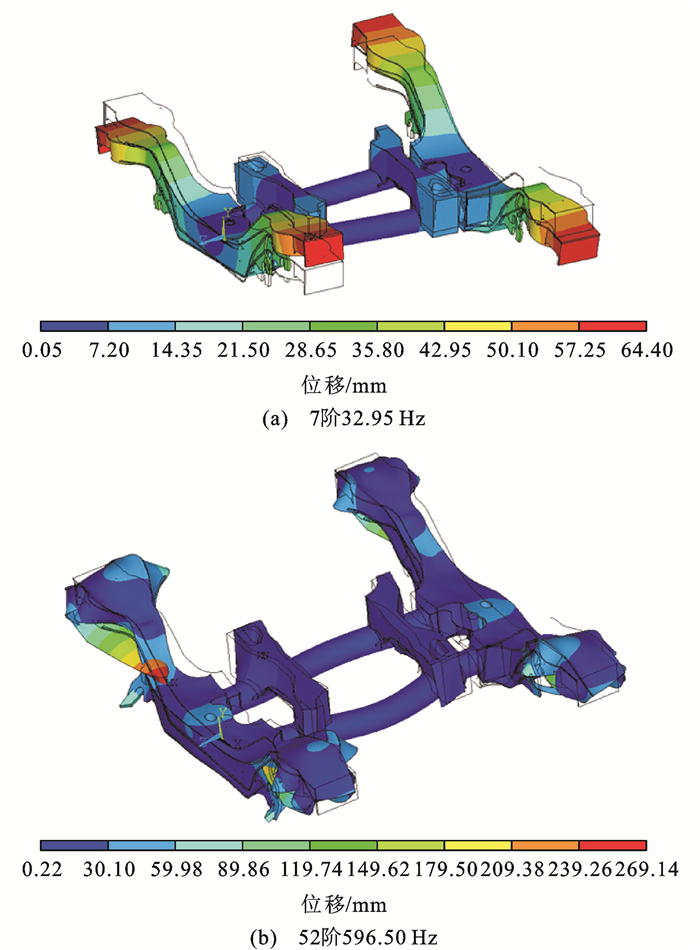
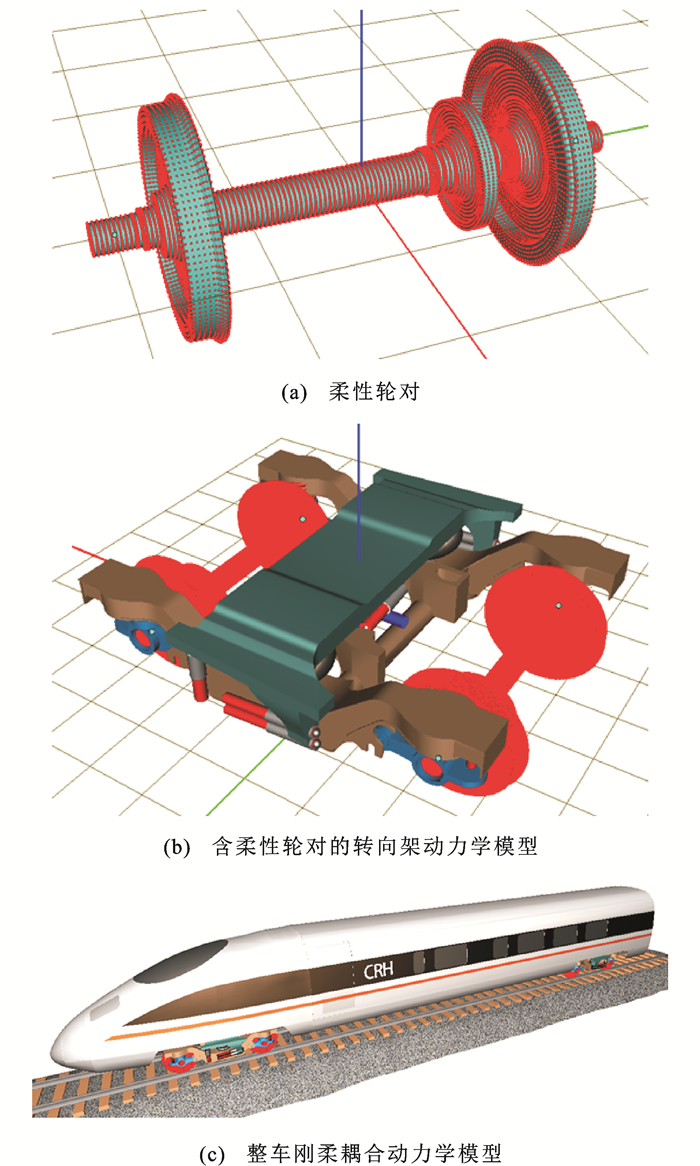
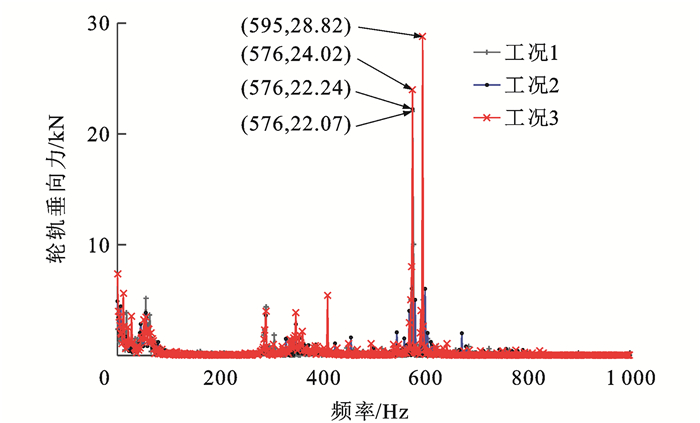
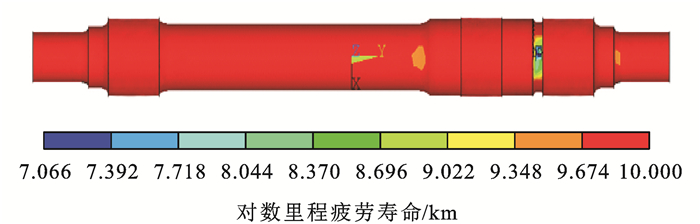
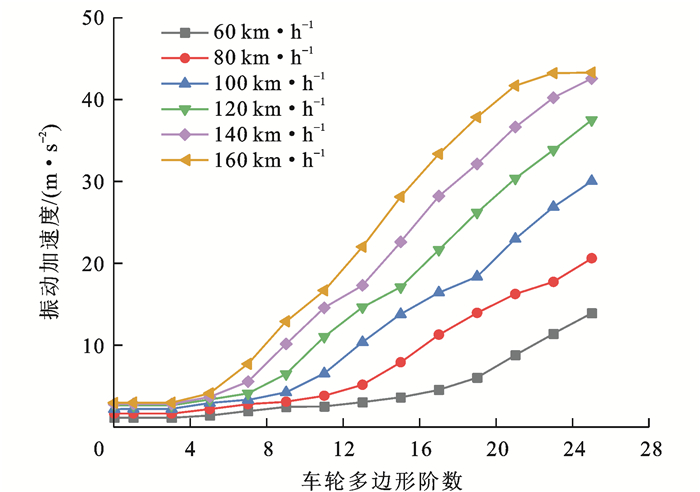
轨道交通列车车轮多边形磨耗机理及其影响综述
吴丹
,
丁旺才
摘要:
总结了近几年国内外轨道交通列车车轮多边形的研究成果,分析了导致车轮形成多边形的主要因素与发生机理以及动车组与地铁车辆多发的高阶车轮多边形不同的原因,探讨了车轮多边形的抑制措施,概括了车辆-轨道耦合动力学模型的产生与发展,总结了车辆-轨道耦合动力学仿真分析的主要成果,提出了考虑车轮多边形等轮轨周期性磨耗下的车辆-轨道系统零部件的疲劳损伤这一新研究方向。分析结果表明:车轮初始缺陷、轮轨摩擦自激振动、轮轨黏滑振动、轮轨系统P2共振、轮对固有模态振动、车轮直径与转向架组成部件引起的共振等会造成车轮多边形的发生;地铁车辆发生的车轮多边形主要是由轮轨系统P2共振所致,而高速动车组多发的高阶车轮多边形一般不是由P2共振直接引起的;提高车轮镟修质量、增加研磨子、提高车轮踏面硬度、增大扣件阻尼、变速运行等措施可以抑制车轮多边形的发展,但从车轮多边形的形成机理可知,车轮初始缺陷是起源,控制车轮初始缺陷是抑制车轮多边形形成与发展的根本,从可行性角度而言,增加研磨子是最理想的措施;当车轮存在高阶多边形后,轮轨激励频率会显著增大且范围分布更广,当激励频率与车辆某些部件的固有振动频率接近时,易引发共振,导致其动应力显著增大,影响其疲劳寿命,故分析车辆-轨道系统主要承载部件的疲劳损伤时,应考虑随机轨道不平顺以及轮轨周期性磨耗等不利因素。可见,现有研究成果基本揭示了车轮多边形的形成机理,并提出了可行的抑制措施,但考虑到列车运行环境的不确定性以及车辆-轨道耦合系统关联因素众多,分析过程难免与实际有差异,故仍需进一步深入研究。
更多>
2024, 24(2): 85-101.
doi:
10.19818/j.cnki.1671-1637.2024.02.005
摘要
(
2956
)
HTML
(
517
)
PDF (8716KB)
(
218
)
引用
(
)
交通基础设施工程
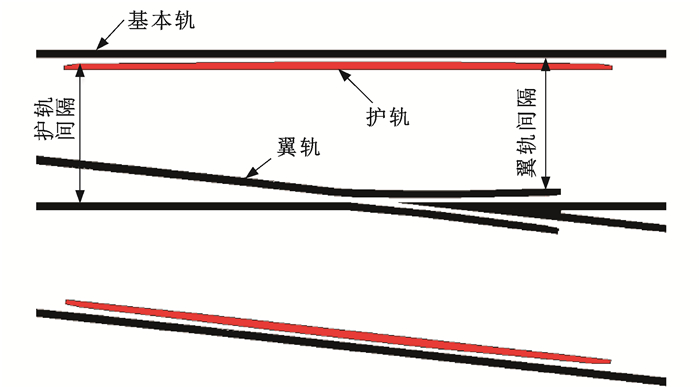
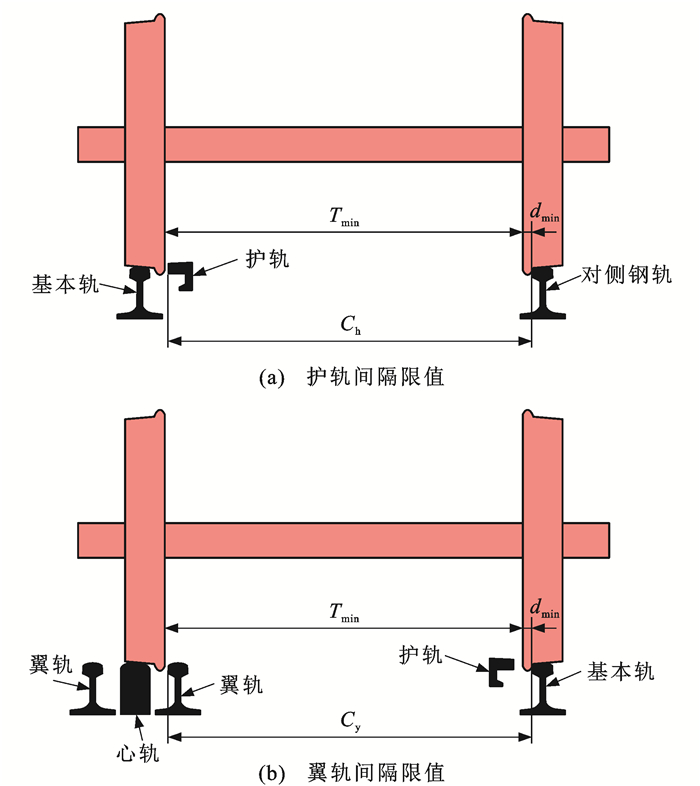
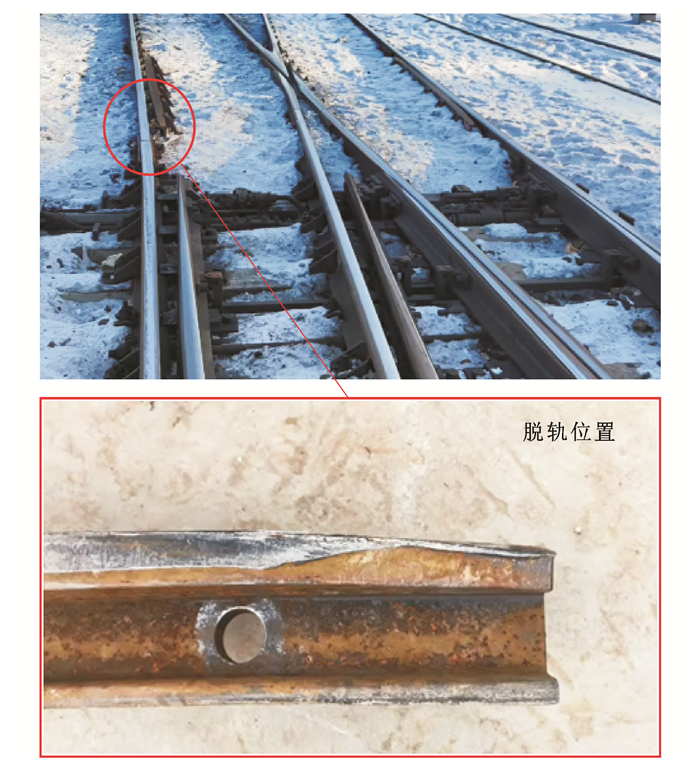
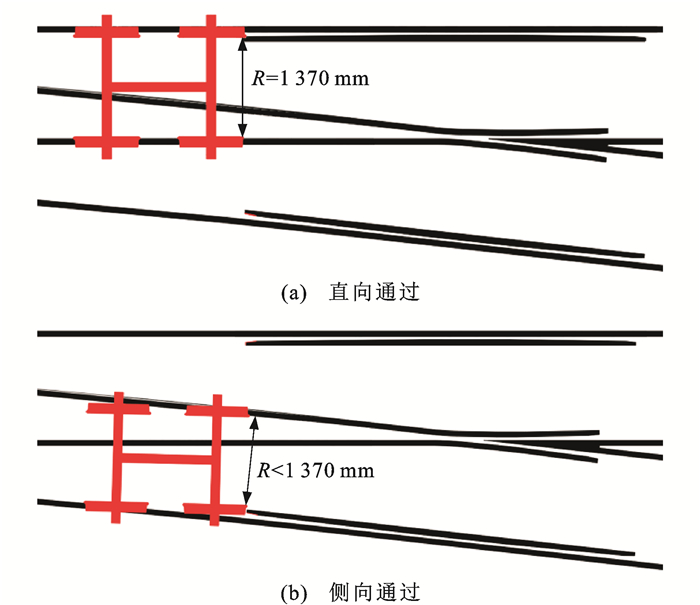
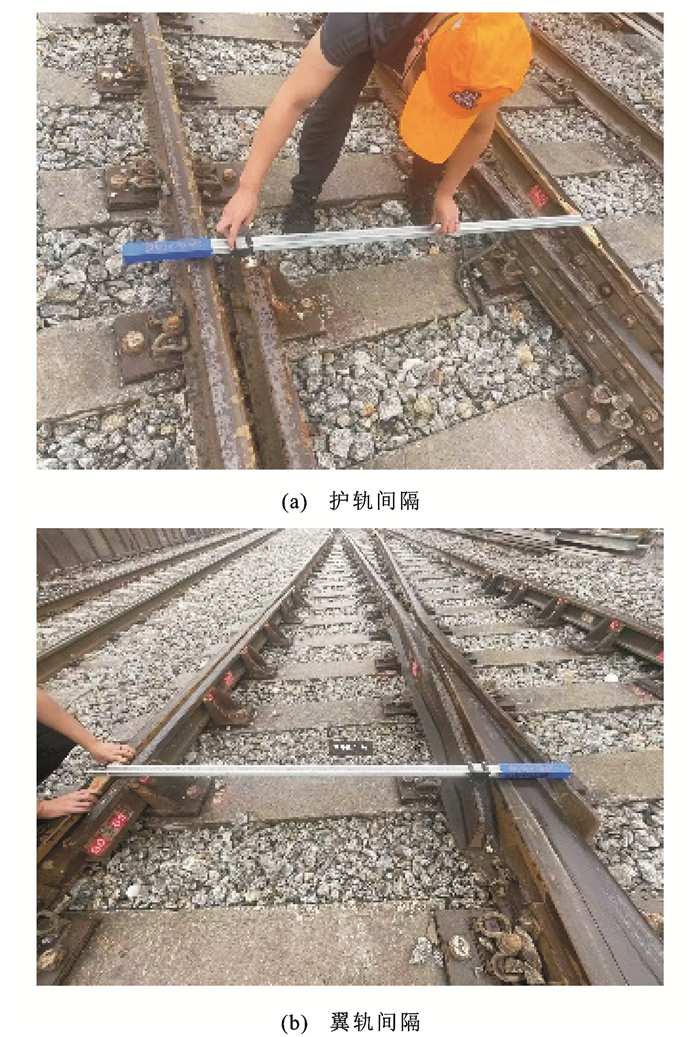
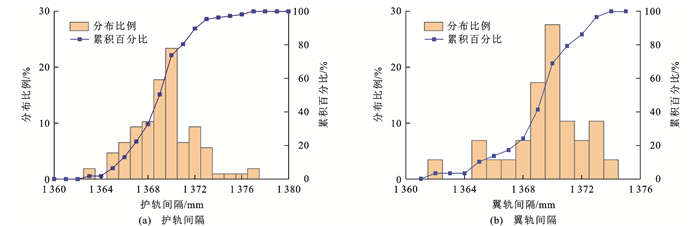
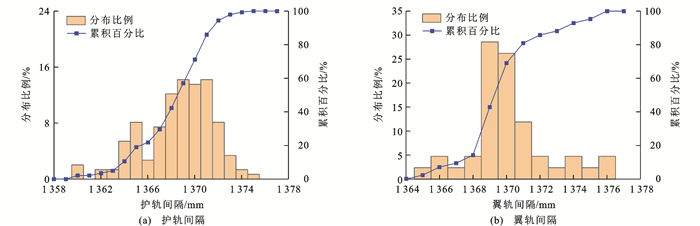
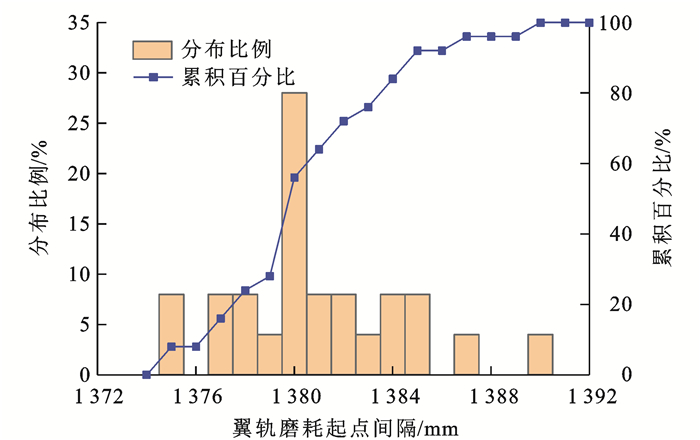
道岔护轨间隔和翼轨间隔限值合理性分析与优化
王璞
,
赵振华
,
葛晶
,
马俊琦
,
王树国
,
刘孝寒
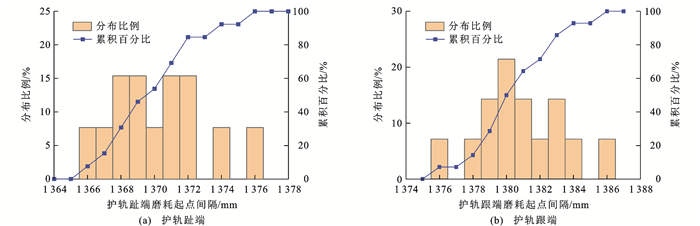
摘要:
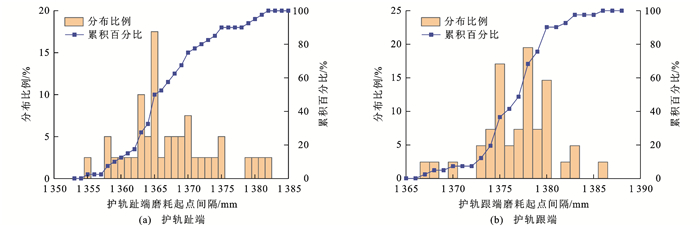
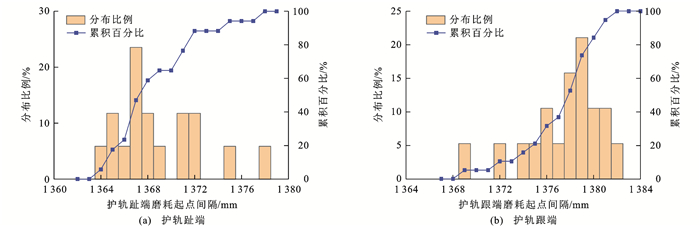
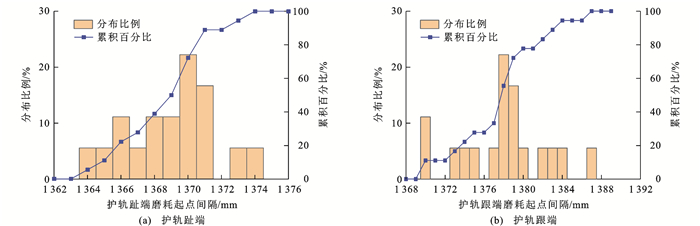
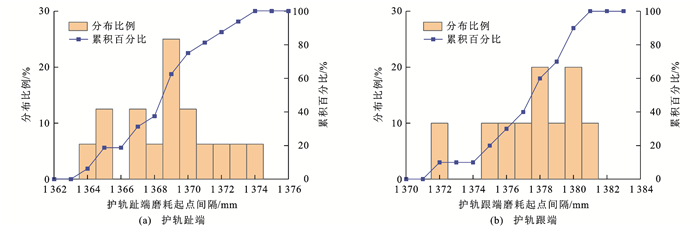
针对近年来多次出现的普速铁路道岔护轨位置脱轨问题,研究了脱轨过程与机理,分析了目前护轨间隔、翼轨间隔限值与计算方法的合理性;在全国范围内选取19个车站、124组道岔开展了系统的现场试验研究,探讨了护轨间隔、翼轨间隔限值的优化方法。研究结果表明:道岔护轨位置脱轨的主要原因为车轮冲击护轨开口段导致护轨螺栓松动、护轨低头、顶部磨耗,最终造成车轮爬上护轨脱轨;现场养护维修中,护轨、翼轨间隔分布较离散,合格率较低,为68.97%~73.83%;目前的翼轨间隔限值安全裕量较大,可适当放松,为现场维修提供方便;与同号码复式交分道岔相比,单开道岔护轨开口段轮轨冲击概率略小;随着道岔号码的增大,护轨开口段冲击概率呈减小趋势;目前的护轨间隔限值设置可将车轮冲击直向护轨以及侧向护轨跟端开口段的概率控制在12%以内,但并不能有效防止侧向护轨趾端开口段的轮轨冲击,概率仍高达53.85%~75.00%;实际养护维修过程中,建议将护轨间隔限值修改为1 365 mm,可满足大部分主型道岔的需求,有效减少和避免护轨趾端开口段的轮轨冲击。
更多>
2024, 24(2): 102-111.
doi:
10.19818/j.cnki.1671-1637.2024.02.006
摘要
(
2290
)
HTML
(
946
)
PDF (14761KB)
(
186
)
引用
(
)
基于多链竞争差分进化算法的无砟轨道结构有限元模型修正
叶玲
,
江宏康
,
陈华鹏
,
冯宇轩
,
王力骋
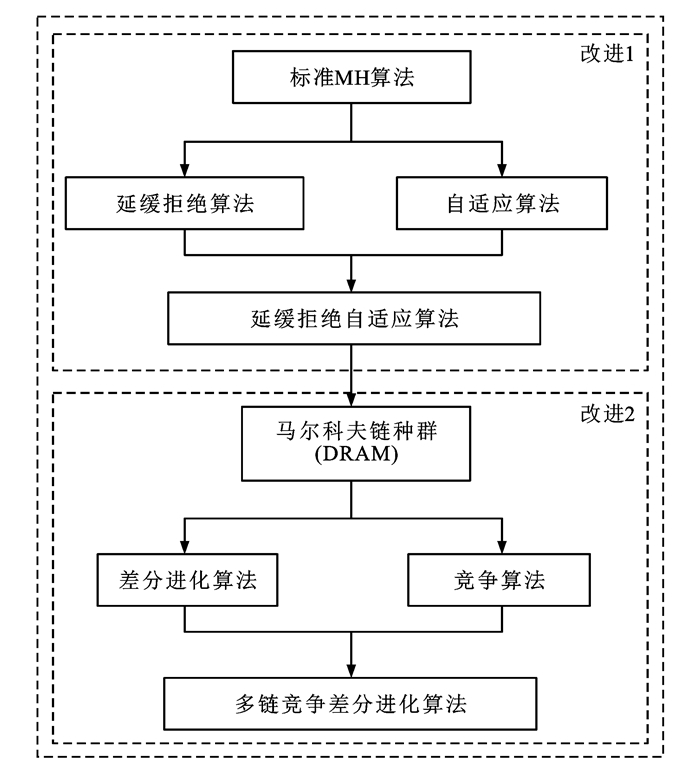
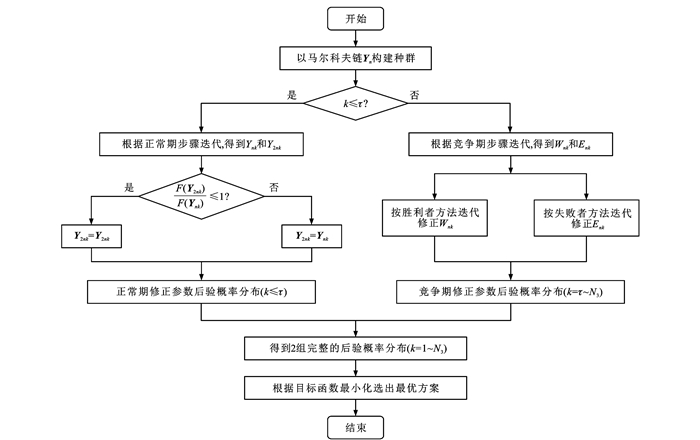
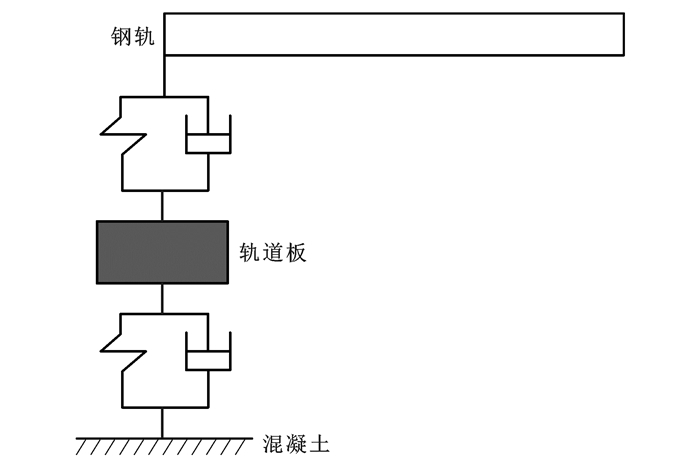
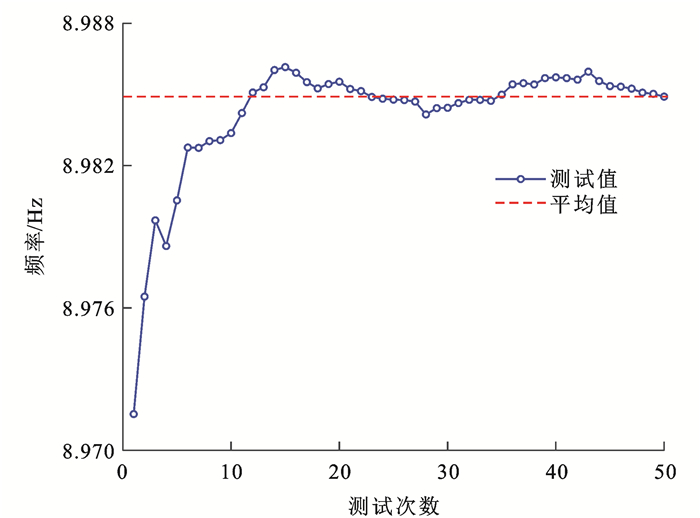
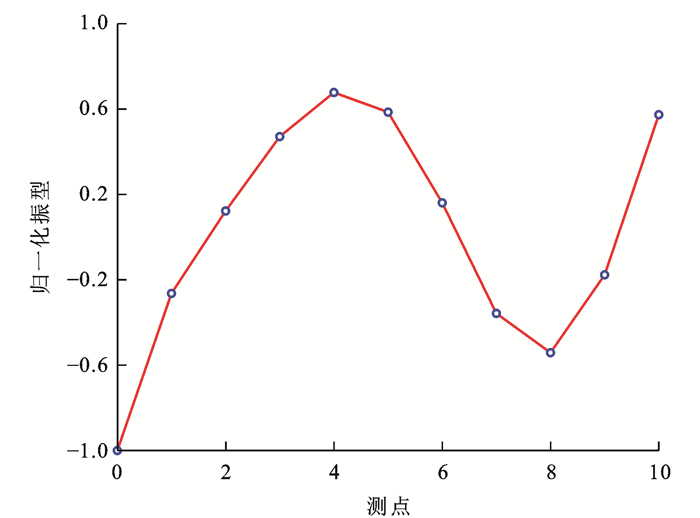
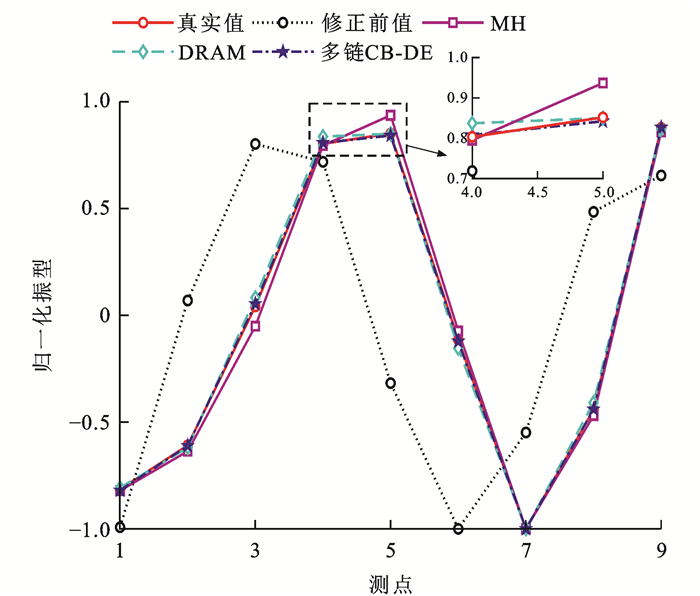
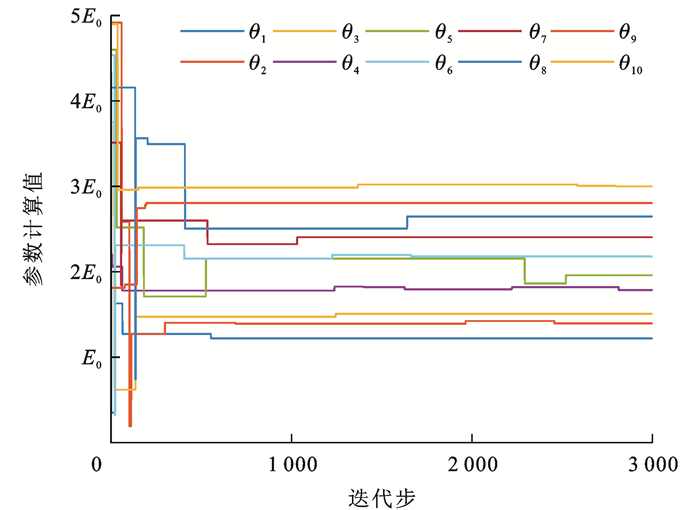
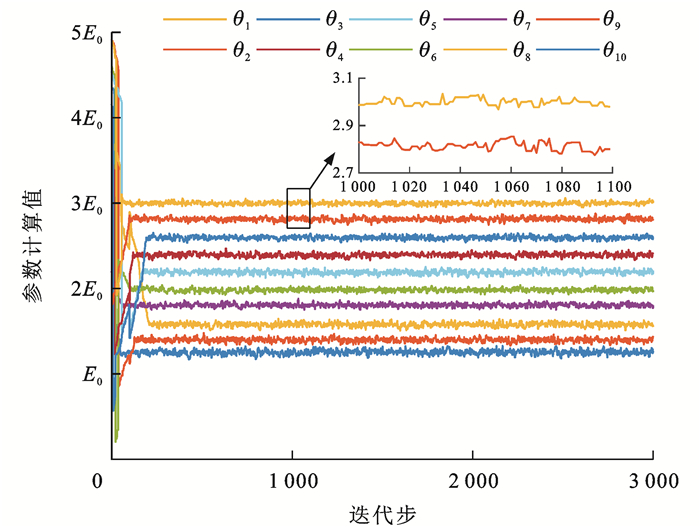
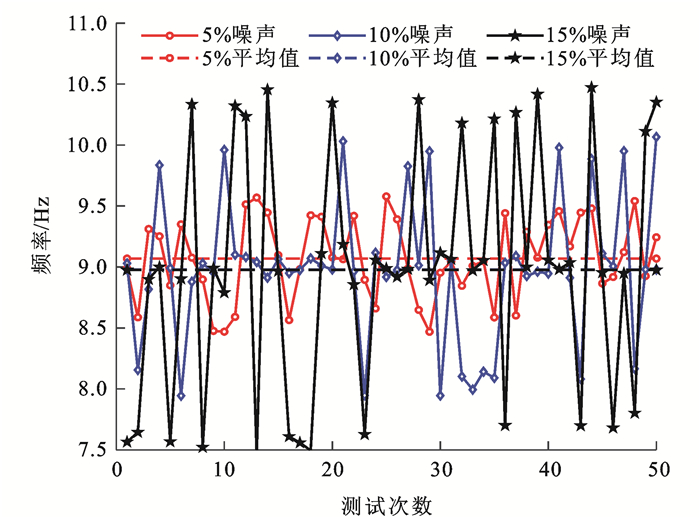
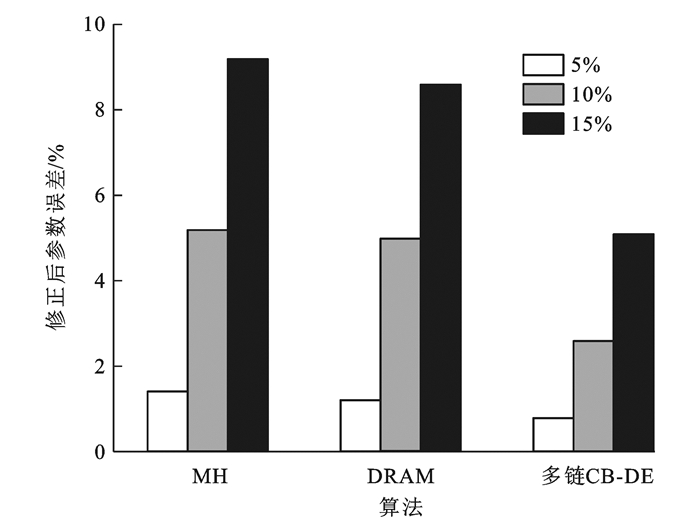
摘要:
为获得更接近真实情况的轨道结构模型,提出了一种基于多链竞争差分进化算法的无砟轨道结构有限元模型修正方法;以频率振型模态为响应建立了适用于无砟轨道结构的目标函数和似然函数,以标准马尔科夫链蒙特卡罗算法为基础,引入多链差分进化算法来解决高维参数模型效率低和收敛难的问题;引进竞争算法,利用竞争决出的失败者向胜利者学习的机制,不断迭代修正钢轨模型以提高修正精度;在此基础上,通过一个无砟轨道结构有限元模型修正数值算例验证所提方法的高效性。分析结果表明:采用Metropolis-Hastings算法和延缓拒绝自适应Metropolis算法修正后,单元参数与真实值间的最大相对误差分别为4.75%和1.35%,而采用多链竞争差分进化算法修正后,单元参数与真实值间的最大相对误差为0.28%,且模态振型向量之间的相关性接近1,说明多链竞争差分进化算法的修正精度优于另外2种算法;在分别加噪5%、10%和15%的噪声测试中,采用Metropolis-Hastings算法和延缓拒绝自适应Metropolis算法修正后,参数误差达到了9%左右,而采用多链竞争差分进化算法模型修正后,参数误差均在5%以内,进一步证明了多链竞争差分进化算法良好的鲁棒性。由此可见,多链竞争差分进化算法可以为解决复杂环境导致测试信息不完备的无砟轨道结构有限元模型修正提供一种新手段。
更多>
2024, 24(2): 112-124.
doi:
10.19818/j.cnki.1671-1637.2024.02.007
摘要
(
2177
)
HTML
(
592
)
PDF (6856KB)
(
135
)
引用
(
)
西安地区洞桩法地铁车站基础结构选型
来弘鹏
,
马小杰
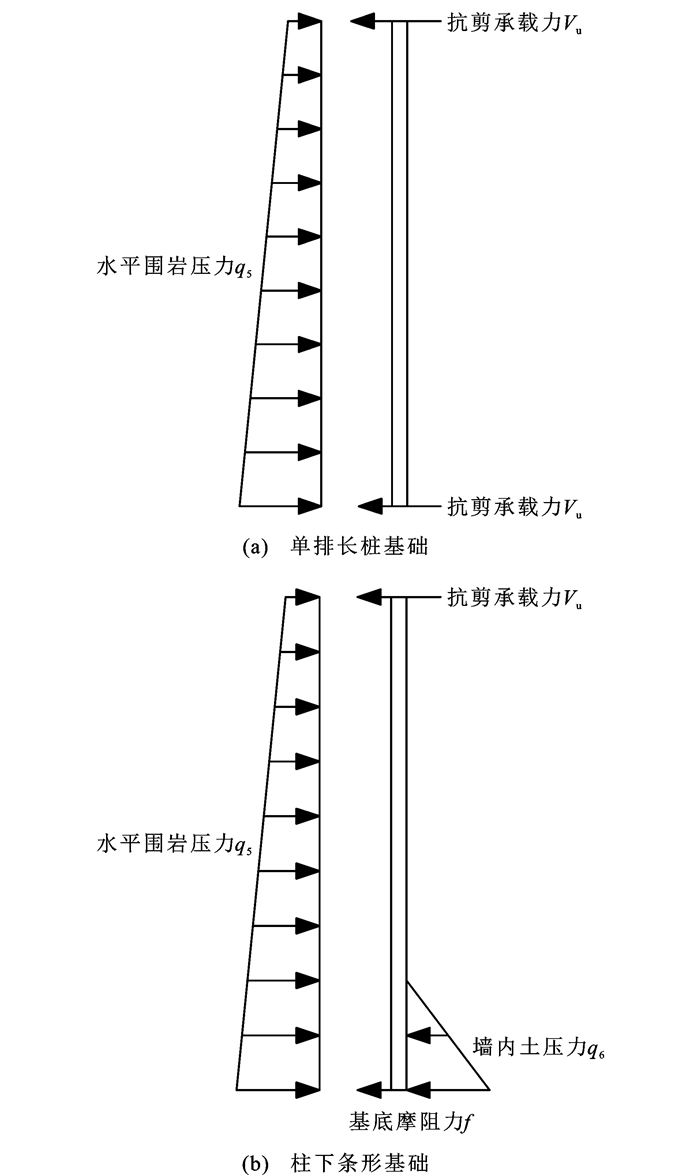
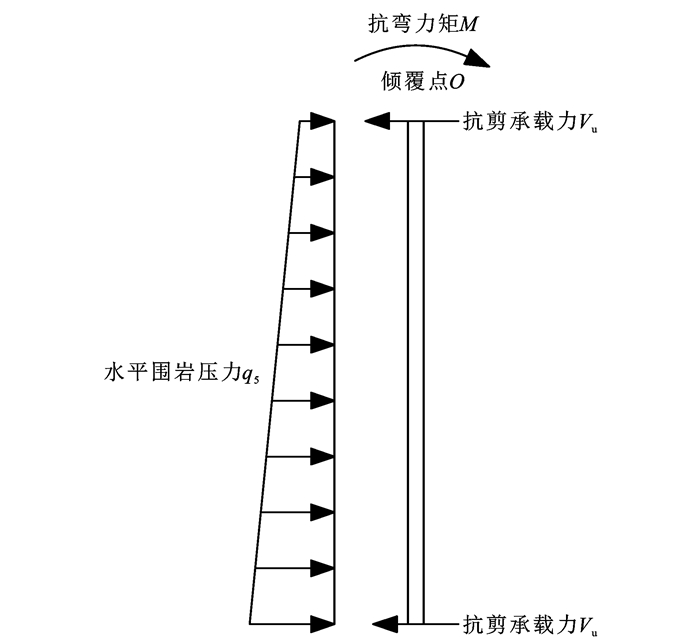
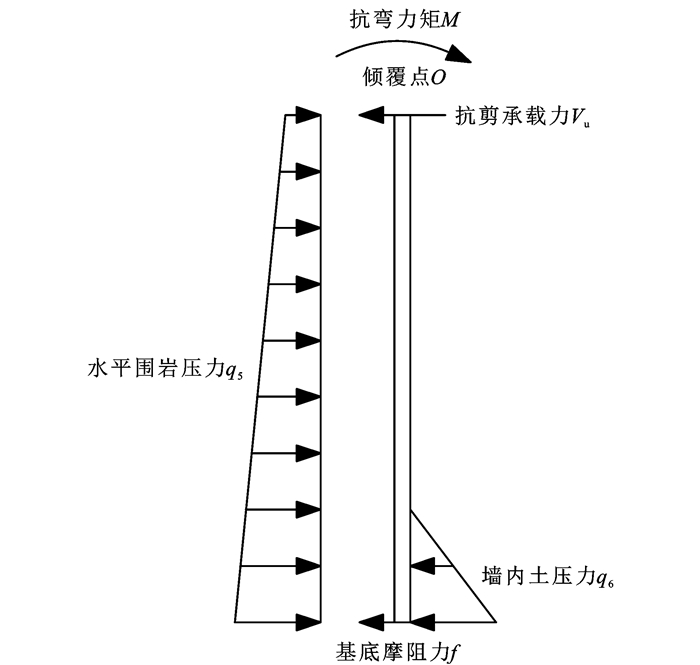
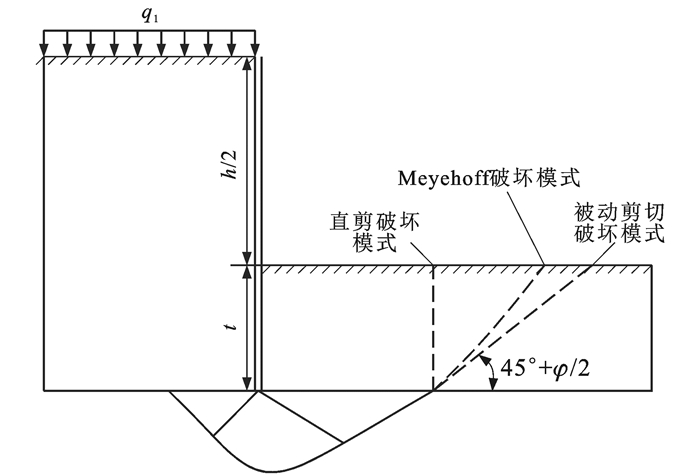
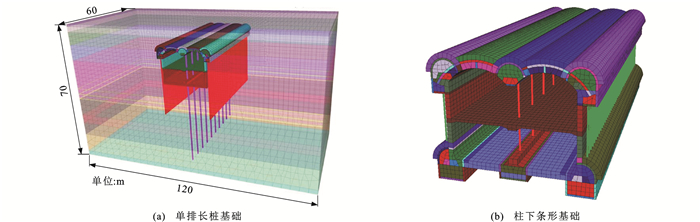
摘要:
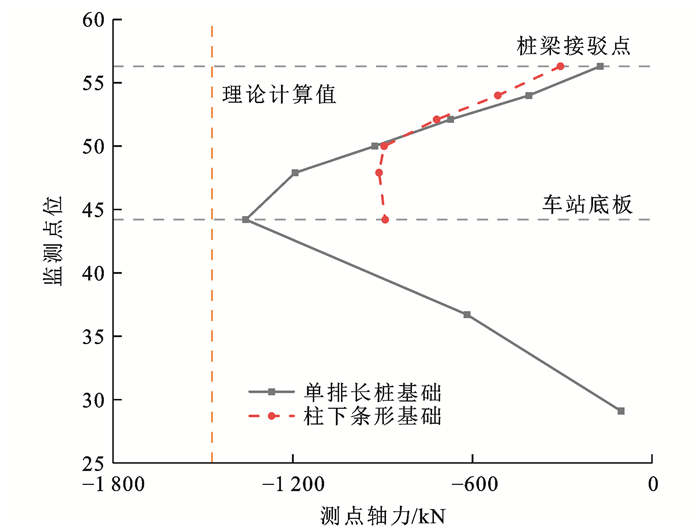
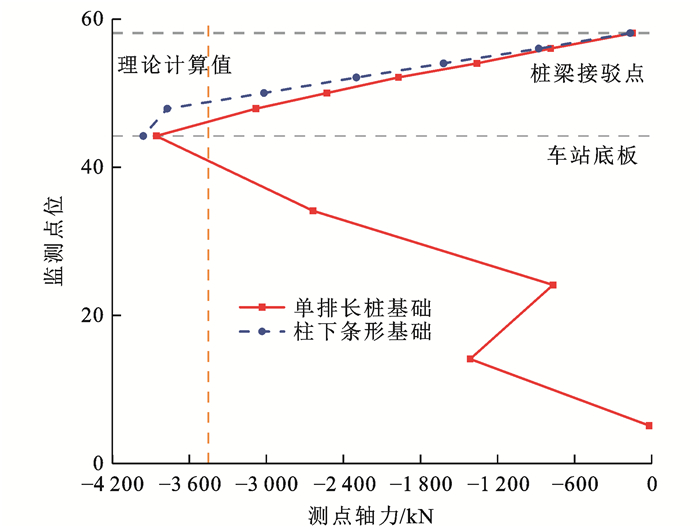
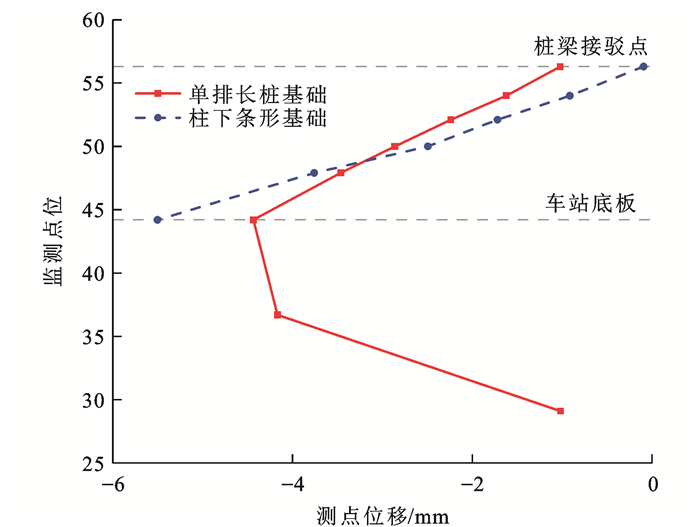
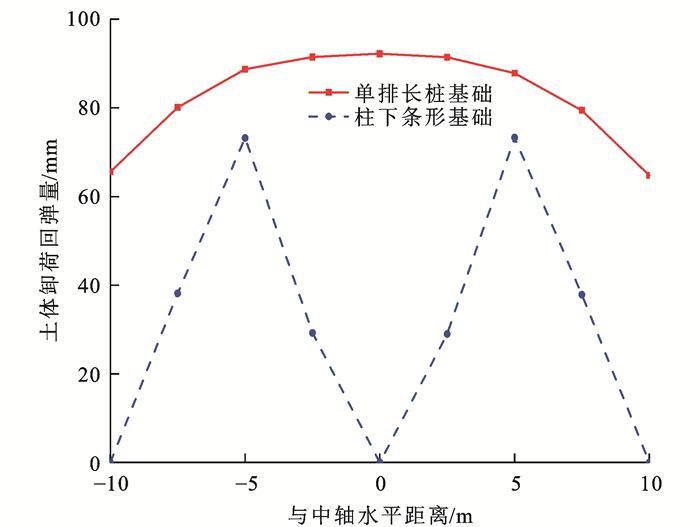
结合西安地层特点,依托5座在建洞桩法地铁车站实体工程,分析了不同基础型式的结构承载特性和最不利工况,选取地基承载力、水平抗剪切、抗倾覆、基底抗隆起、结构允许水平位移作为评价基础结构强度及刚度安全性的基本准则,构建了洞桩法基础结构的力学模型,推导了不同破坏模式下结构的安全系数计算公式,提出了适用于西安地区洞桩法基础结构选型理论体系中各项安全系数取值建议,给出了不同地层及埋深条件下单排长桩基础和柱下条形基础的适用范围。研究结果表明:西安地区洞桩法基础结构按地基承载力、水平抗剪切、抗倾覆、基底抗隆起及结构允许水平位移等基本准则计算时,安全系数应分别不小于1.2、1.3、1.3、1.6、1.4;洞桩法的中柱基础结构选型主要受地基竖向承载力准则的影响,采用相同柱跨型式时,柱下条形基础在砂土地层中的适用性优于其在粉质黏土-砂互层和粉质黏土地层中的适用性,而单排长桩基础可通过增加桩长等方式提高结构承载力,理论上在各类地层条件下的适用性均优于柱下条形基础;边桩基础结构需要采用复合准则综合分析其适用性,柱下条形基础结构的适用性受地层条件影响较大,在粉质黏土和粉质黏土-砂互层条件下结构抗倾覆安全性难以满足要求,而单排长桩基础在各项准则下主要受自身结构强度和刚度的影响,在各类地层中的适用埋深无明显差异;西安地区洞桩法地铁车站采用单排长桩基础型式的适用性较好,而柱下条形基础可通过扩大基础宽度等方式来满足结构安全性要求。
更多>
2024, 24(2): 125-136.
doi:
10.19818/j.cnki.1671-1637.2024.02.008
摘要
(
1317
)
HTML
(
350
)
PDF (6362KB)
(
123
)
引用
(
)
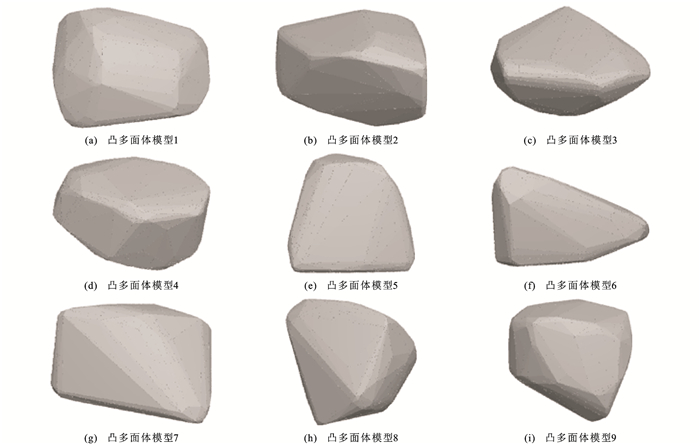
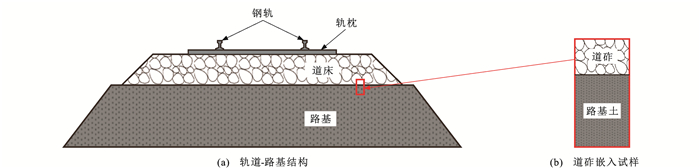
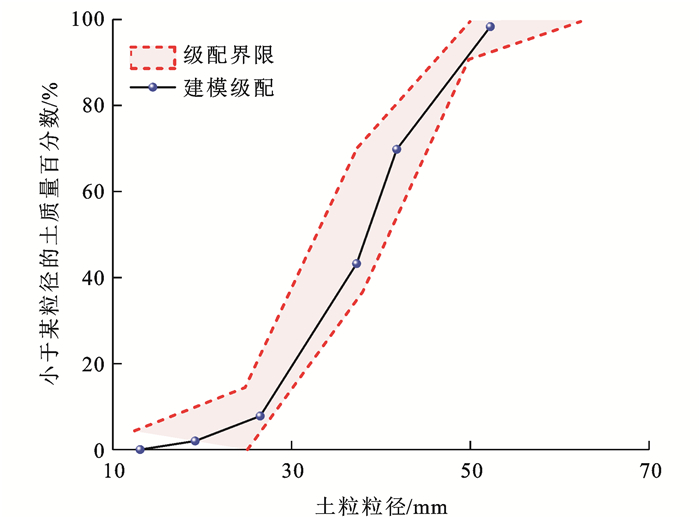
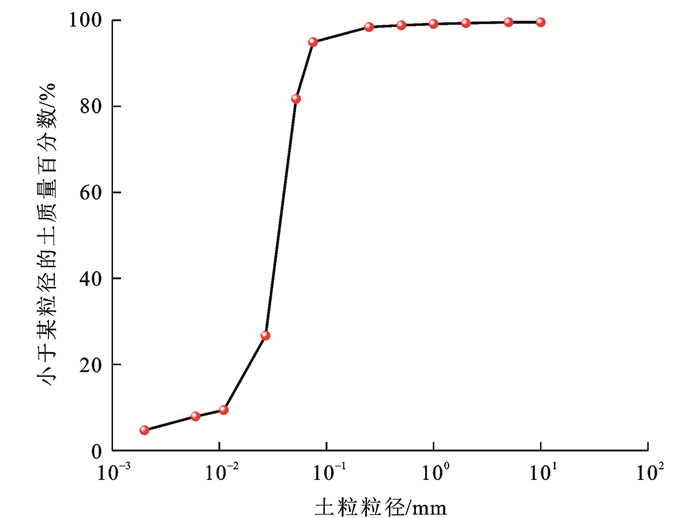
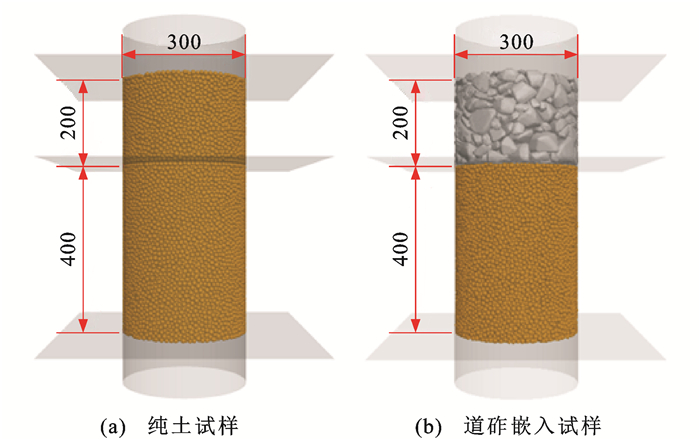
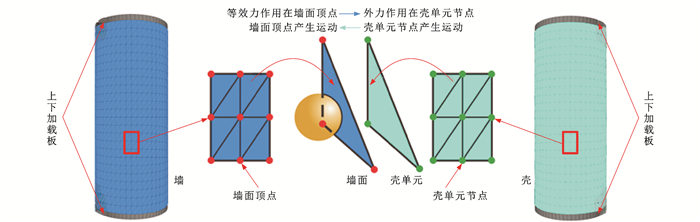
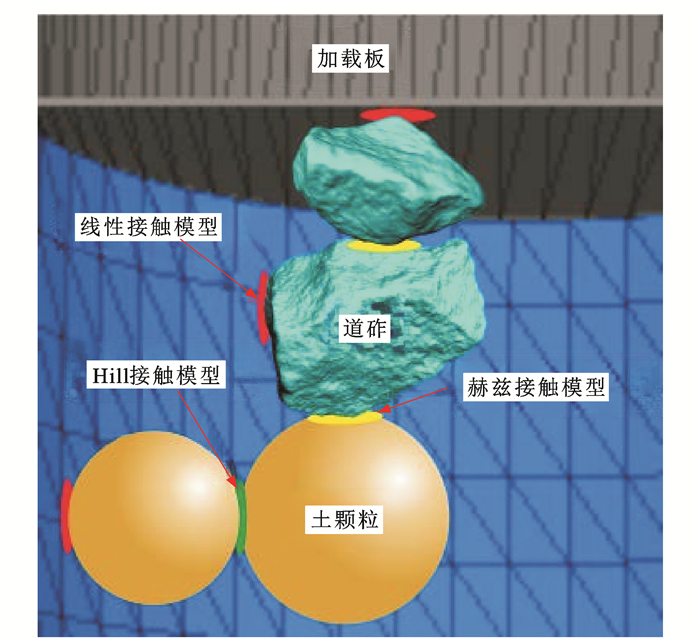
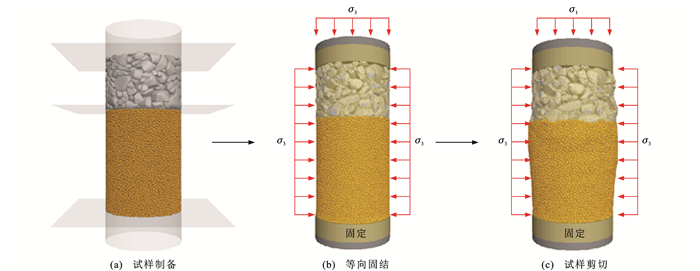
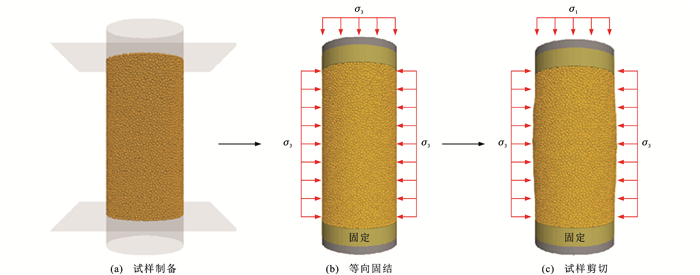
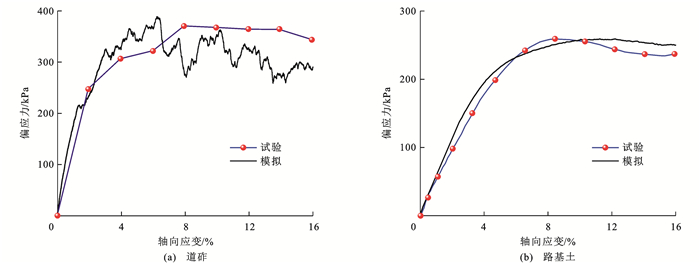
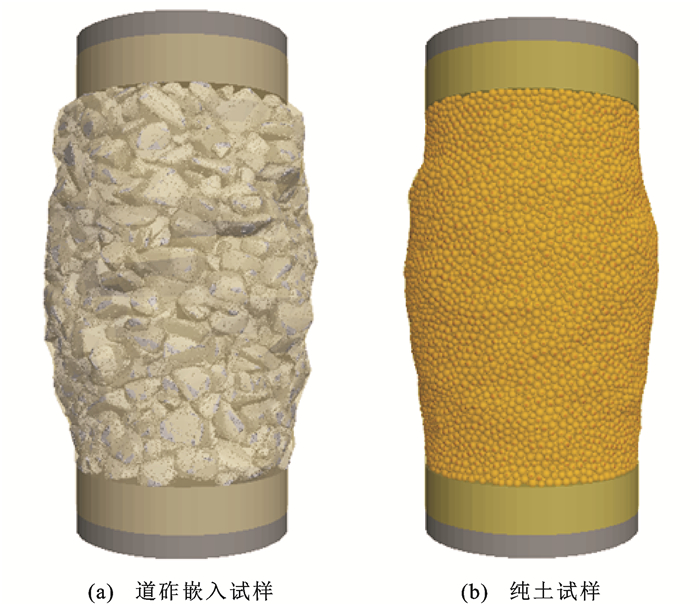
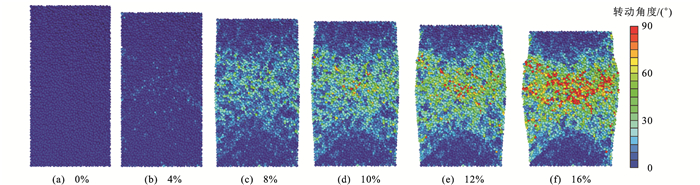
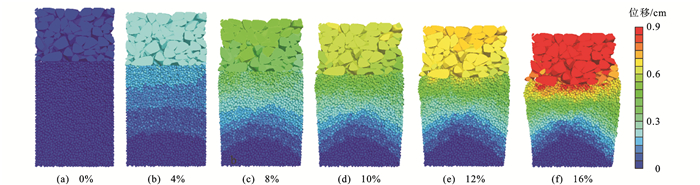
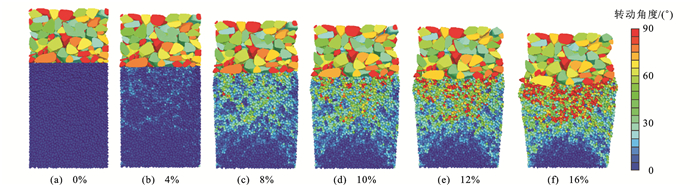
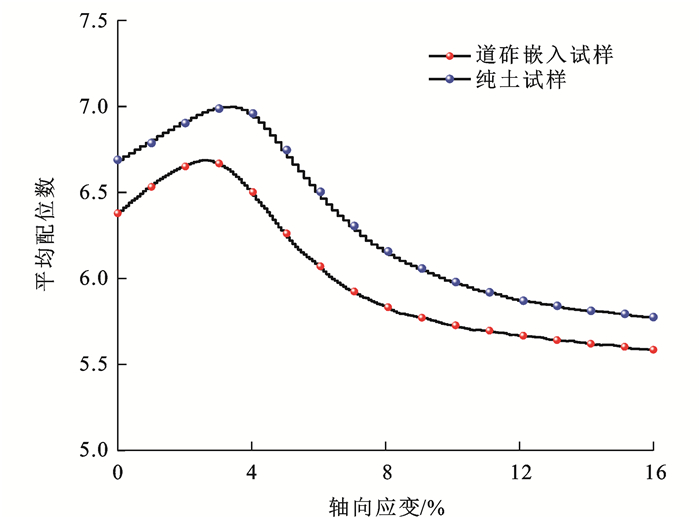
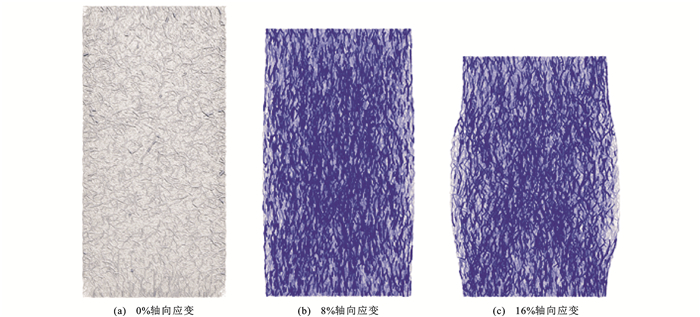
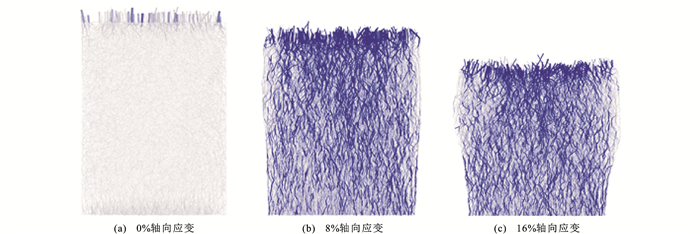
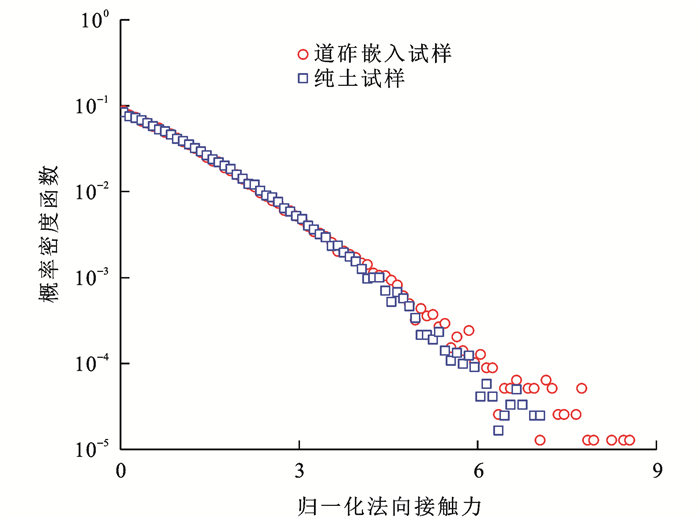
道砟嵌入路基土试样离散元虚拟三轴试验
张杰
,
聂如松
,
李列列
,
黄茂桐
,
谭永长
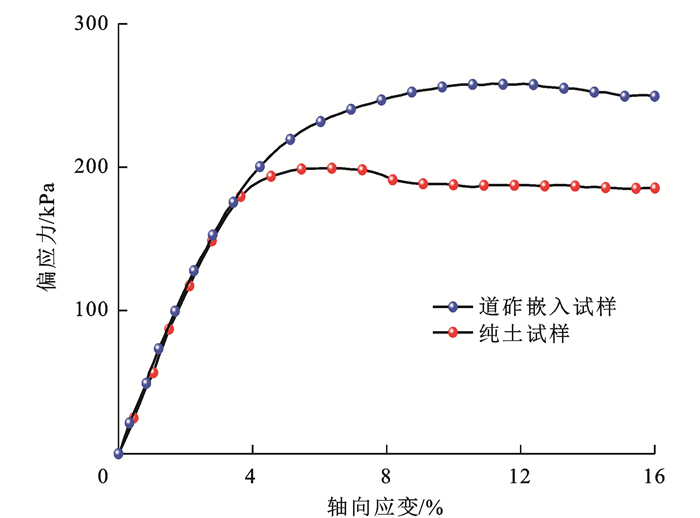
摘要:
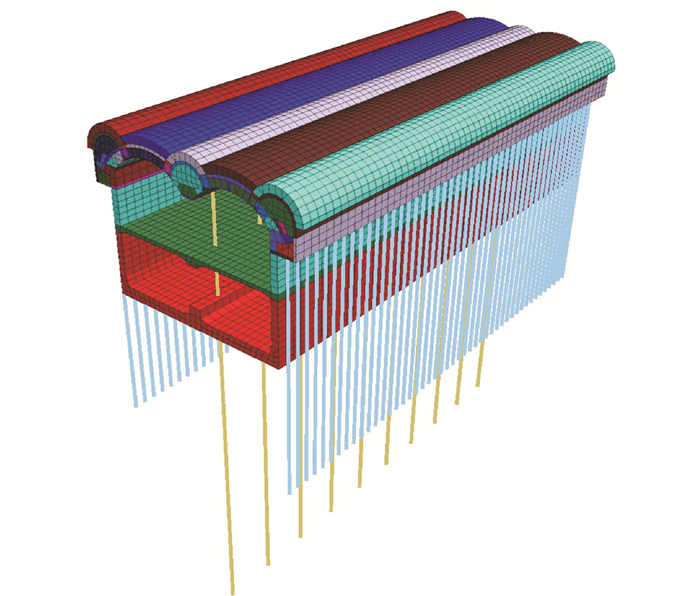
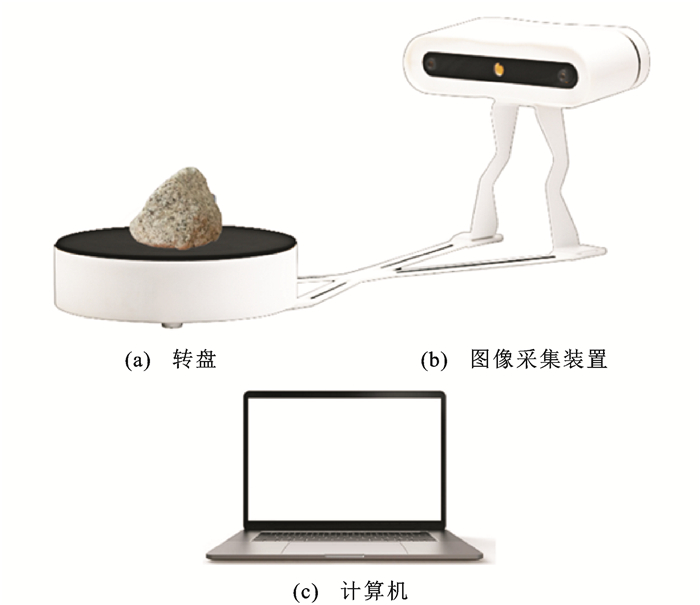
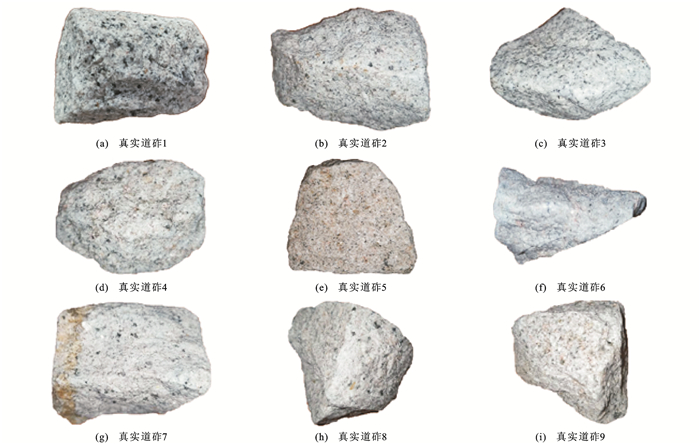
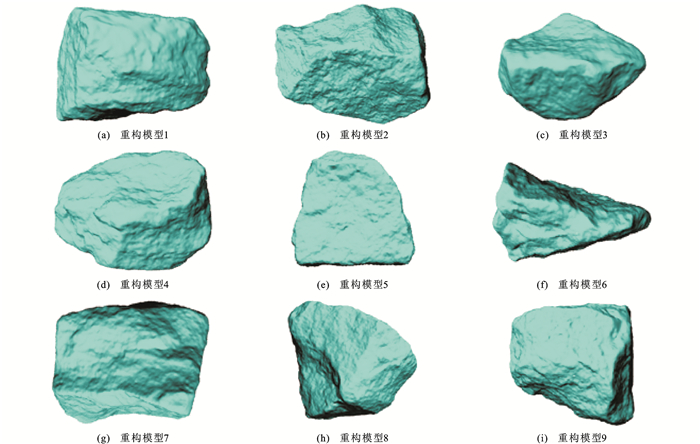
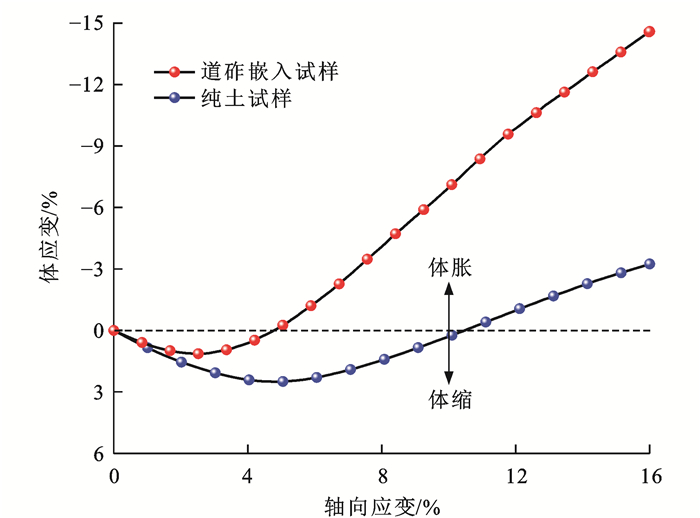
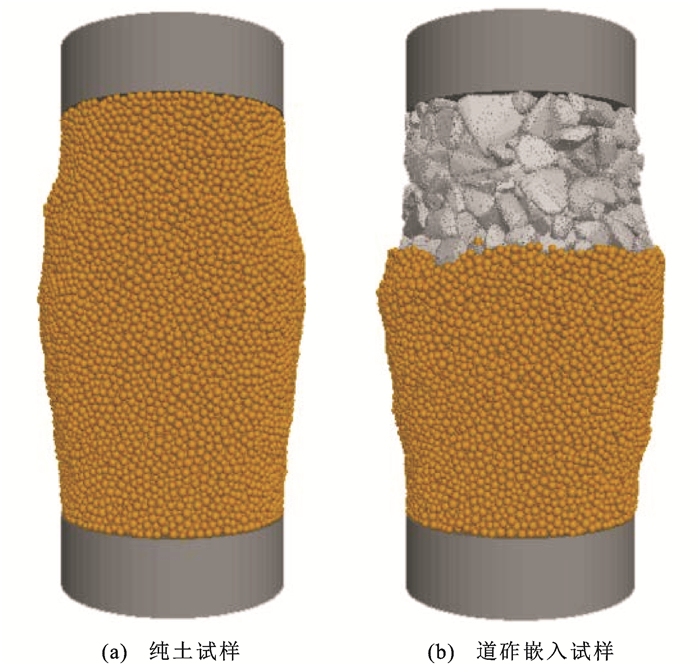
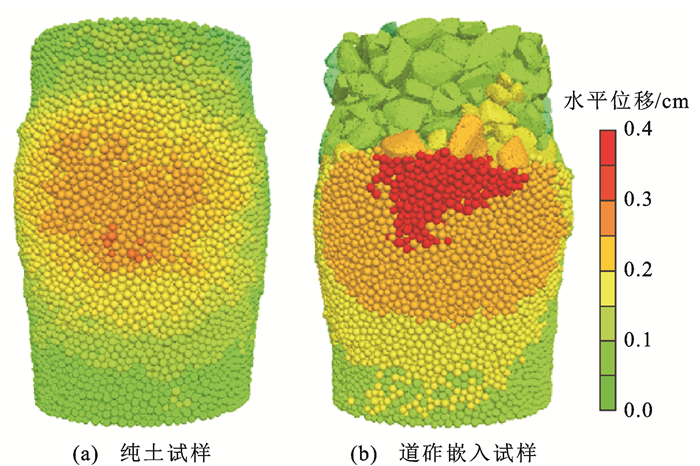
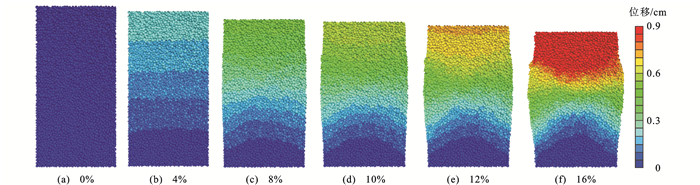
采用离散元法(DEM)从宏细观角度研究了有砟轨道道砟嵌入对路基土变形特性的影响;基于三维结构光扫描系统对道砟颗粒外形进行重构,实现道砟颗粒的精细化建模;基于DEM软件PFC3D V6.0建立高度为600 mm、直径为300 mm的道砟嵌入试样与纯土试样三轴计算模型;通过有限差分法(FDM)与DEM耦合,实现三轴围压柔性加载,分别对2种试样进行三轴试验模拟;对比分析了道砟嵌入试样与纯土试样的模拟结果,明确道砟嵌入对路基土变形特性的影响。研究结果表明:围压为30 kPa时,道砟嵌入试样峰值强度为257 kPa,纯土试样峰值强度为199 kPa,相比于纯土试样,道砟嵌入会使土体承受荷载的能力降低;剪切结束时纯土试样体应变为-3.24%,道砟嵌入试样为-14.59%,道砟嵌入试样剪胀效应更为明显;纯土试样与道砟嵌入试样侧向变形机理不同,纯土试样中部产生鼓胀变形是因为其中部区域不受约束,颗粒可自由运动,道砟嵌入试样土样表层发生侧向鼓胀是因为道砟-土界面处发生的道砟嵌入对表层土颗粒向两侧挤压的排挤作用;2种试样土颗粒配位数变化趋势一致,均表现出随轴向应变先增加、后减小、最后趋于平缓的趋势,但纯土试样土颗粒配位数明显高于道砟嵌入试样;纯土试样力链沿轴向发展且分布均匀,道砟嵌入试样会在道砟-土接触界面出现明显接触力集中。
更多>
2024, 24(2): 137-151.
doi:
10.19818/j.cnki.1671-1637.2024.02.009
摘要
(
1807
)
HTML
(
422
)
PDF (34627KB)
(
137
)
引用
(
)
载运工具运用工程
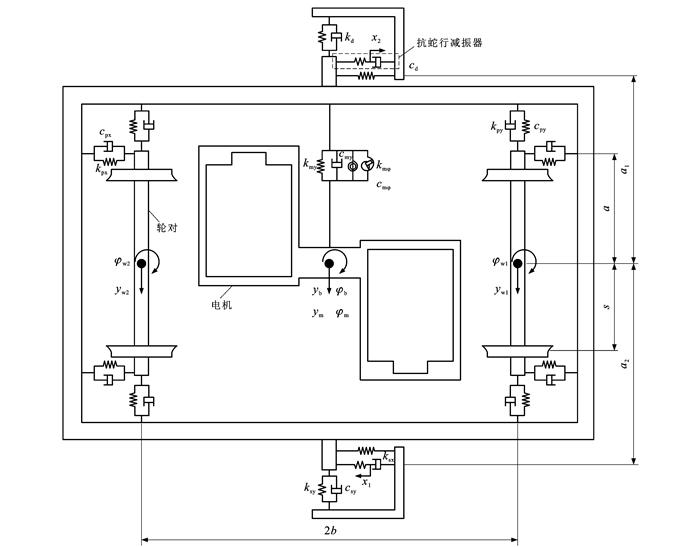
基于电机架悬的转向架稳定性与控制策略
冯遵委
,
胡晗达
,
杨震寰
,
黄彩虹
,
郑彪
,
曾京
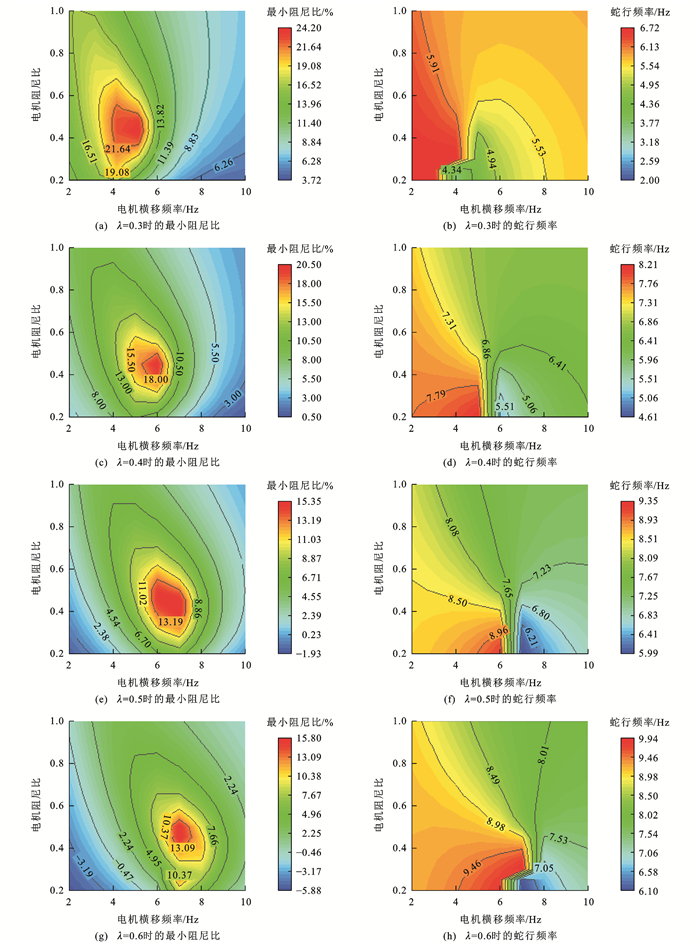
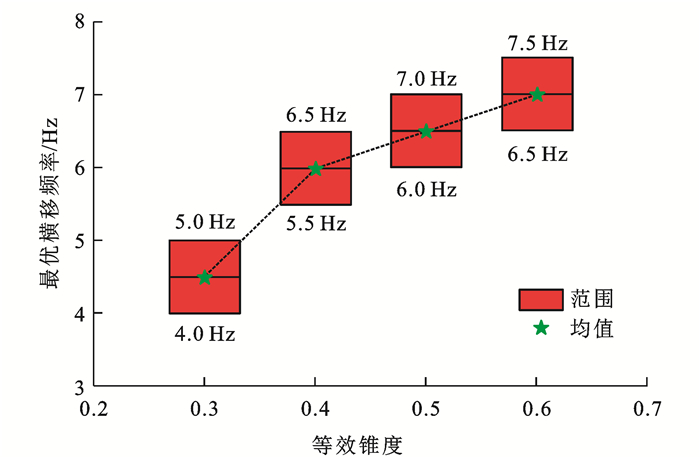
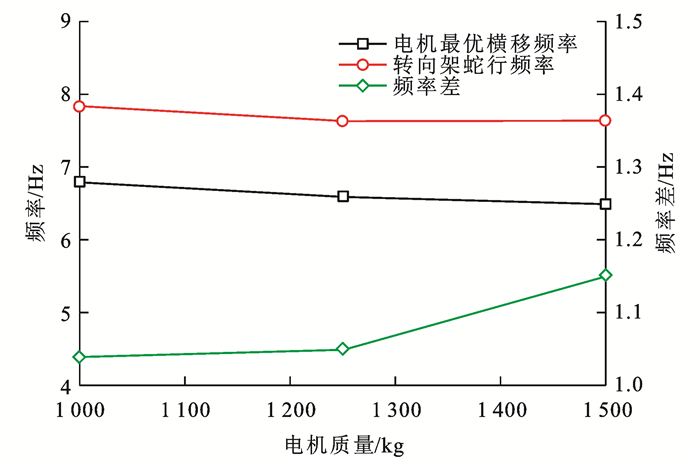
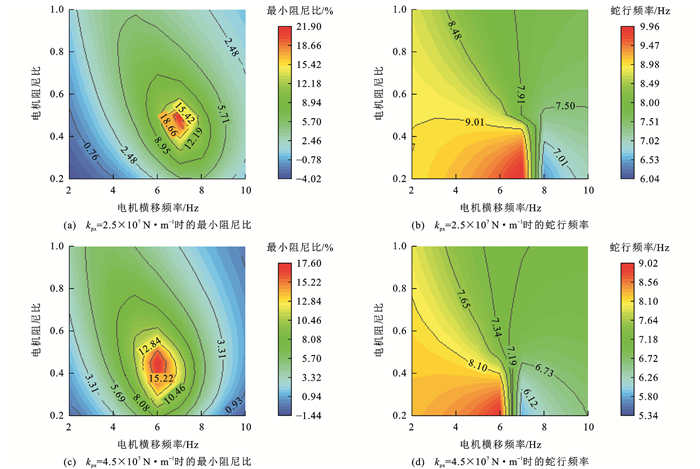
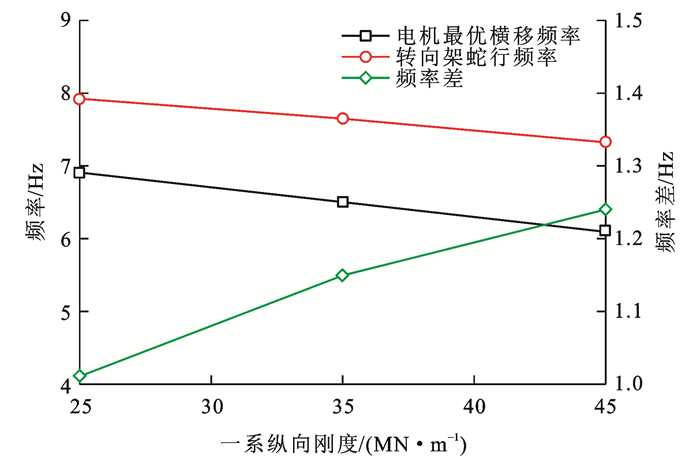
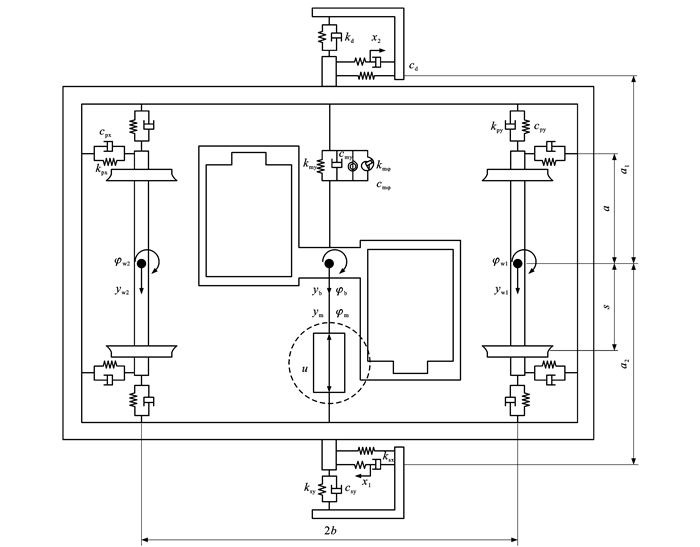
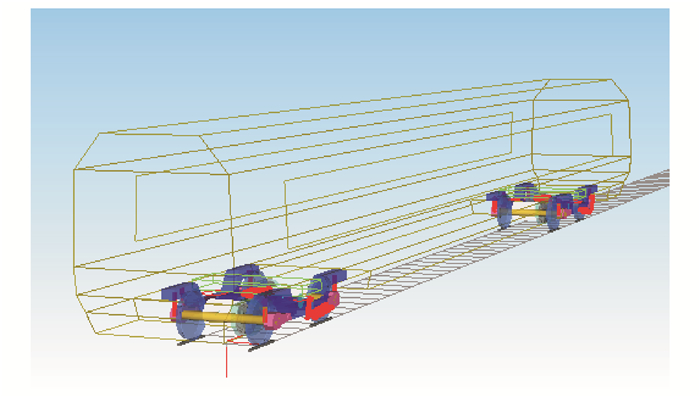
摘要:
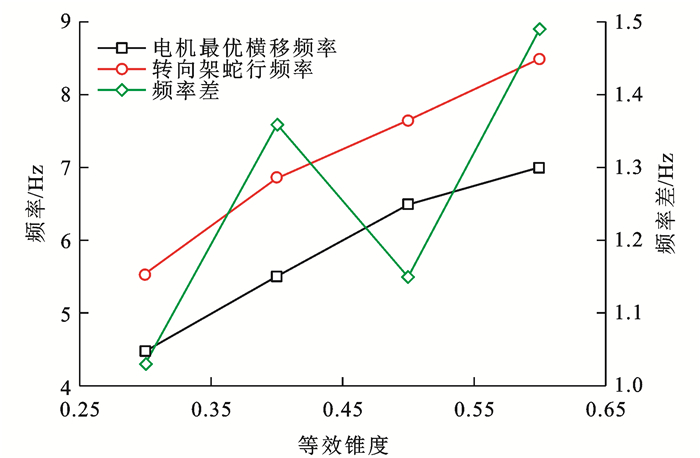
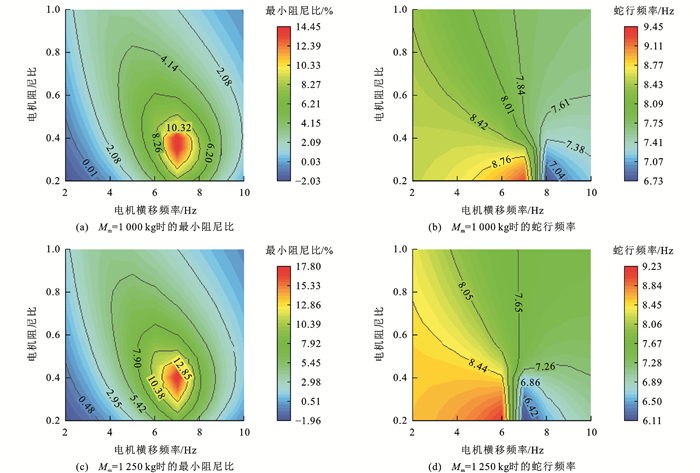
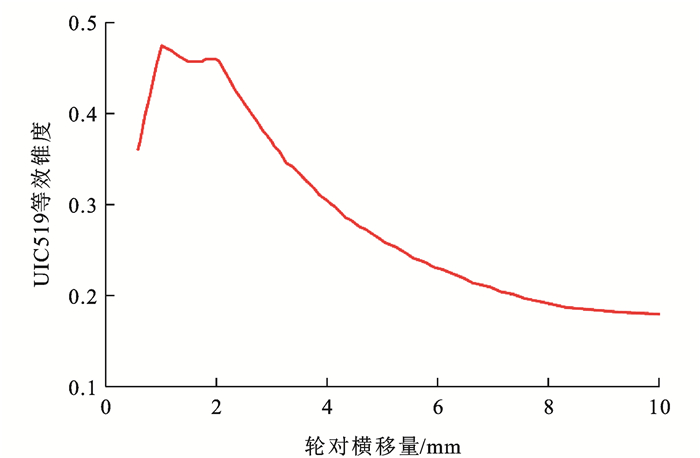
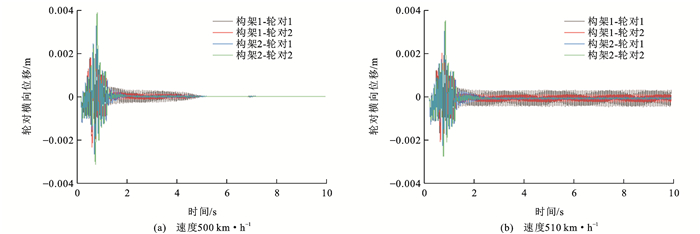
实时调整架悬电机参数,以提高转向架的蛇行运动稳定性;建立了电机架悬转向架动力学模型,包含2个轮对、1个构架和2个电机,轮对和构架间考虑了一系悬挂装置,构架和车体间的二系悬挂装置考虑了空气弹簧和抗蛇行减振器,将2个电机考虑为一个整体并与构架弹性连接;基于高速转向架系统模型的最小阻尼比来寻找电机最优横移频率,分析了转向架参数对电机最优横移频率的影响,并针对该型转向架提出了一种能够提升蛇行运动稳定性的电机主动架悬反馈控制策略;通过开展电机主动架悬的高维车辆SIMPACK/SIMULINK联合仿真,对电机架悬控制策略进行了验证。研究结果表明:电机最优横移频率会随轮轨等效锥度的增大而增大,当轮轨等效锥度由0.3增大至0.6时,电机最优横移频率会由4.5 Hz增大到7.0 Hz;不同的等效锥度、电机质量和一系纵向刚度下,电机最优横移频率和转向架蛇行频率的差值均为1.0~1.5 Hz,因此,可通过检测转向架的蛇行频率再减去1.0~1.5 Hz获得电机最优横移频率,用电机和构架的相对位移和速度作为反馈信号,使电机能够实时获得最优架悬参数,成为理想的动力吸振器;高维数值仿真显示,电机主动架悬相比电机被动架悬可以使车轮磨耗后车辆的临界速度由370~380 km·h
-1
提高至500~510 km·h
-1
,并使构架横向加速度由2 m·s
-2
降低至1 m·s
-2
,说明提出的电机架悬控制策略可有效改善转向架的蛇行稳定性。
更多>
2024, 24(2): 152-165.
doi:
10.19818/j.cnki.1671-1637.2024.02.010
摘要
(
2126
)
HTML
(
563
)
PDF (14278KB)
(
158
)
引用
(
)
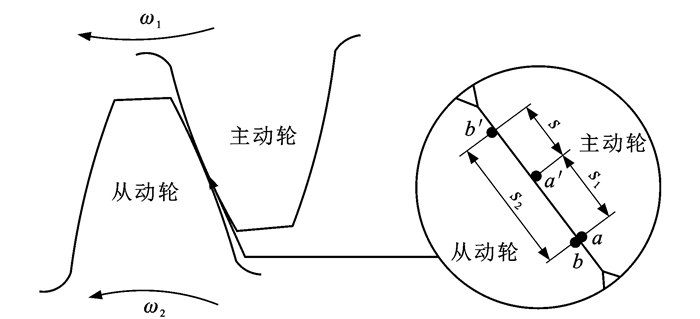
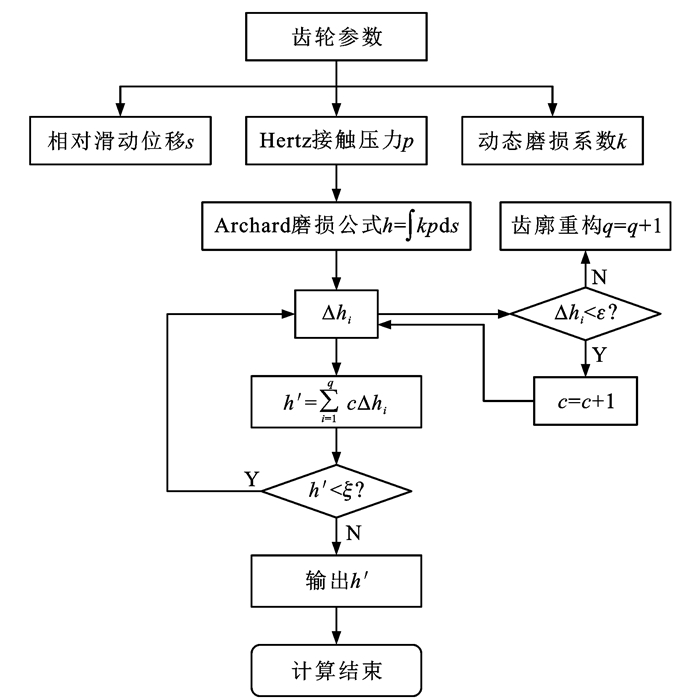
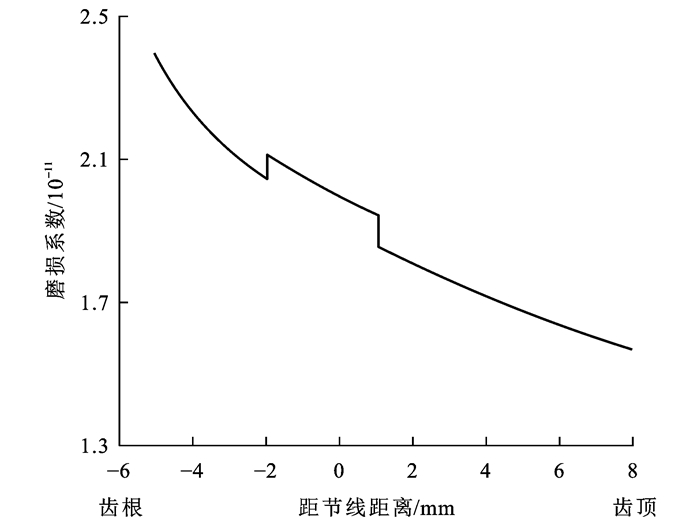
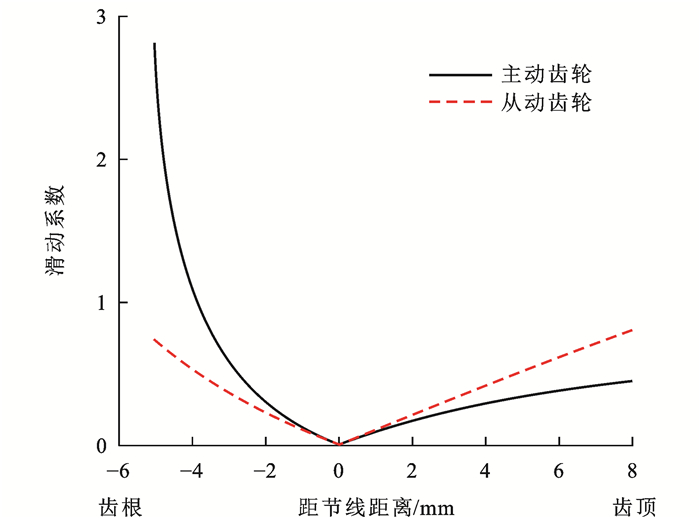
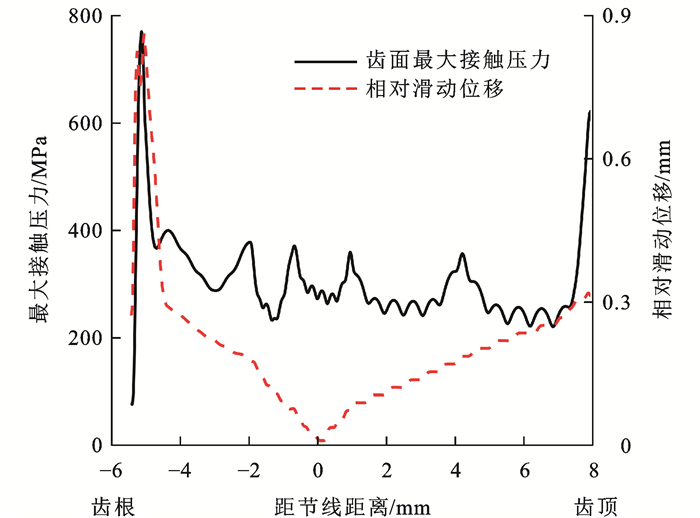
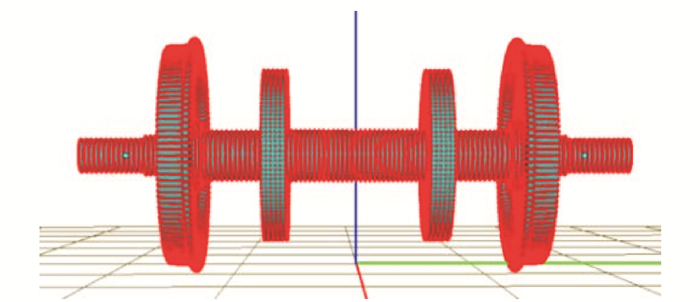
内外激励下机车齿轮磨损仿真分析
朱海燕
,
王梦威
,
郑宇轩
,
易勇
,
肖乾
,
曾京
,
张卫华
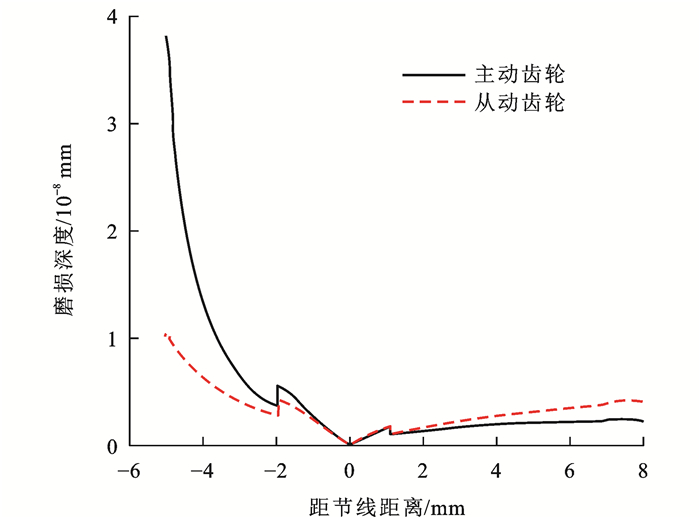
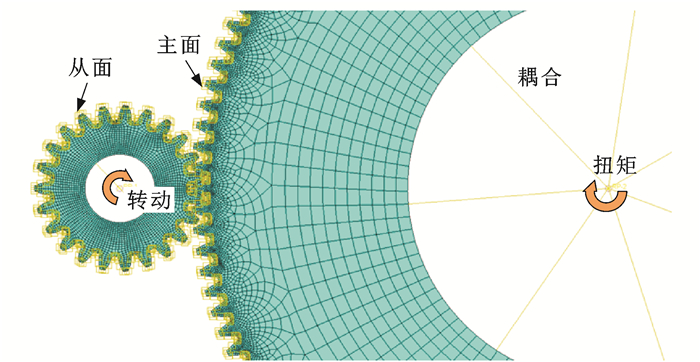
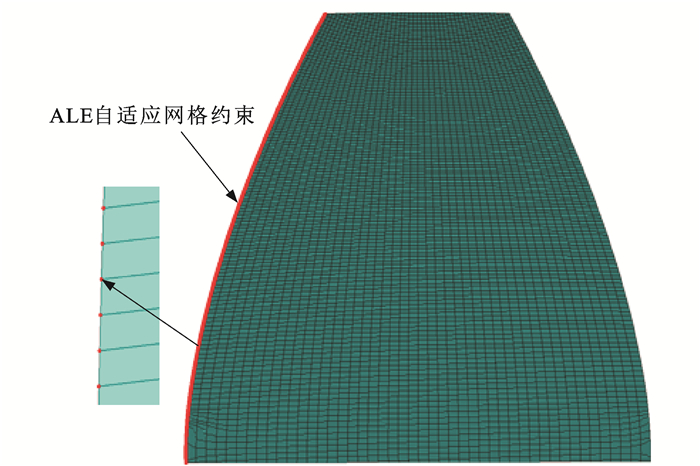
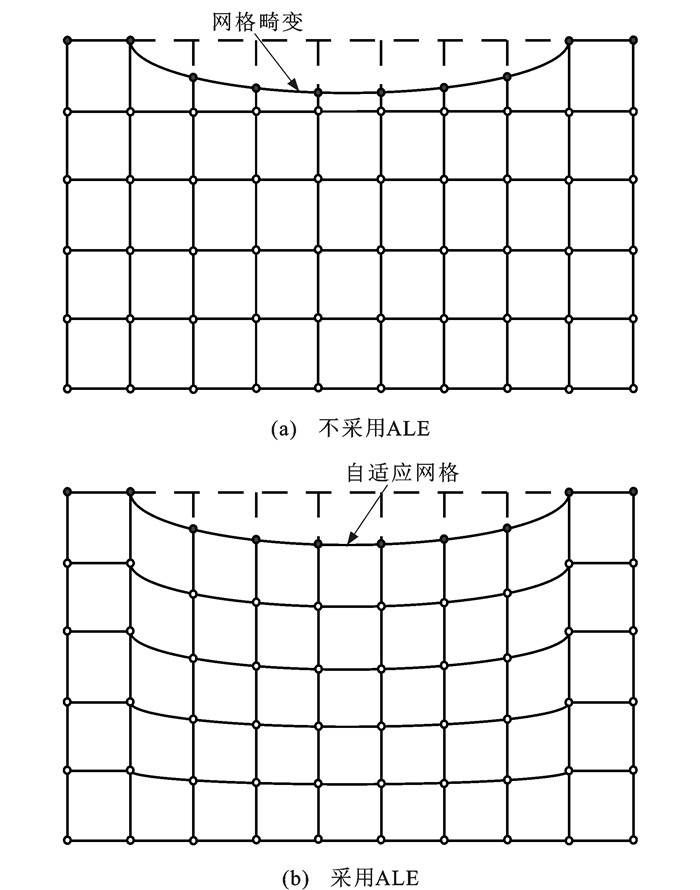
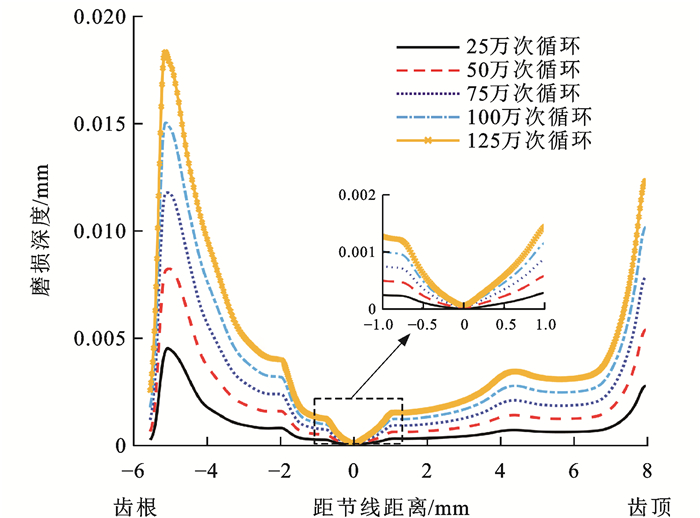
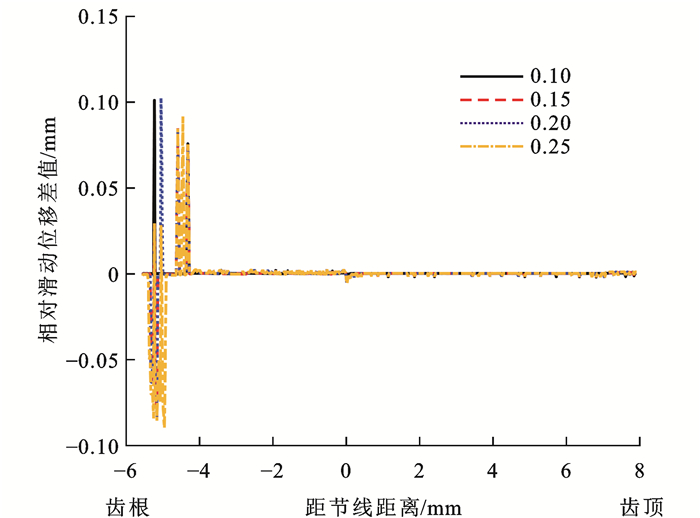
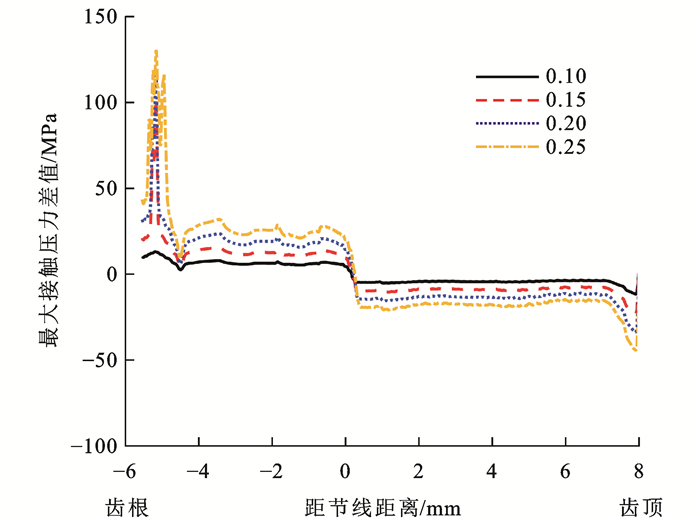
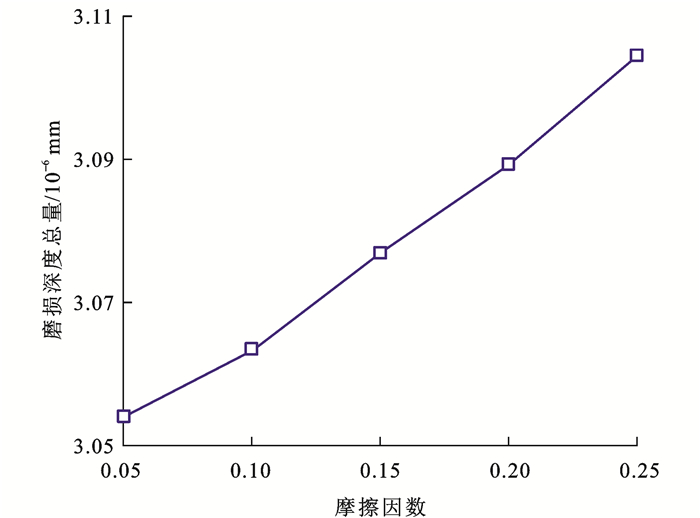
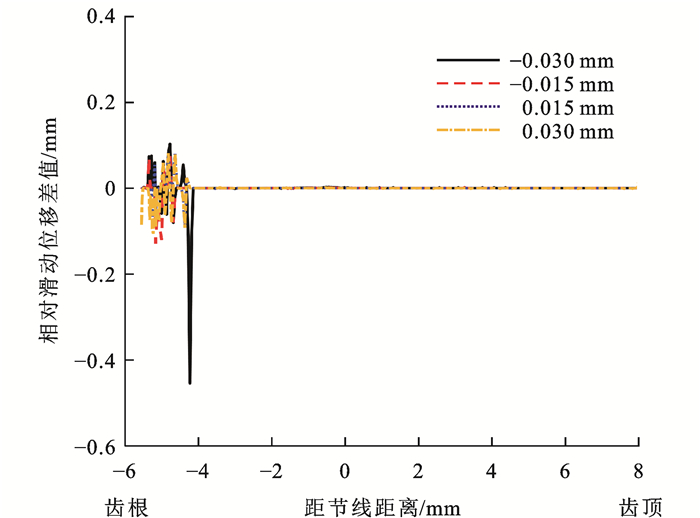
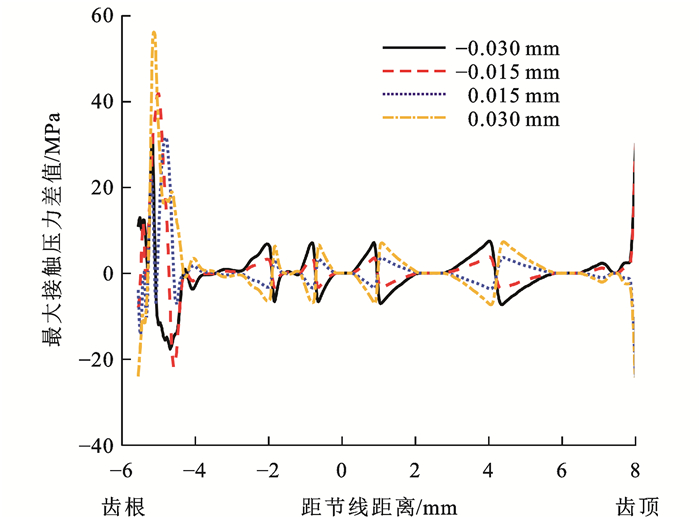
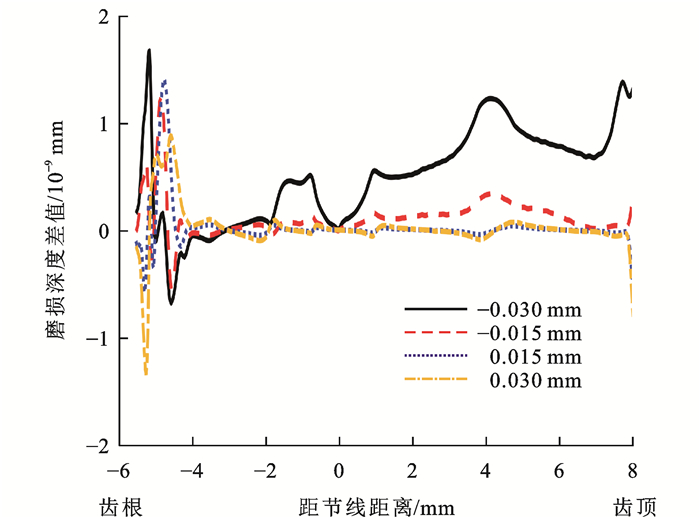
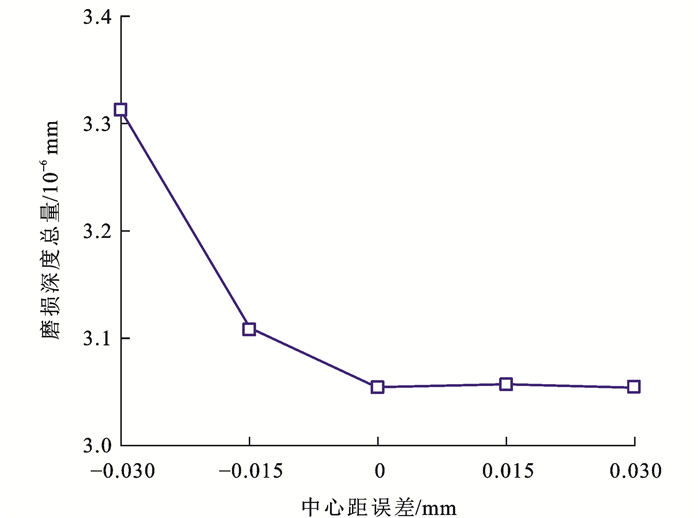
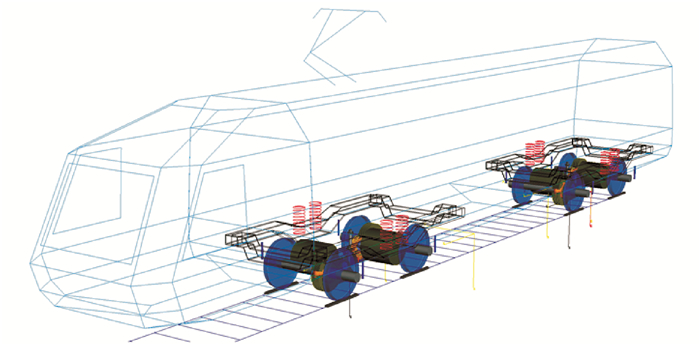
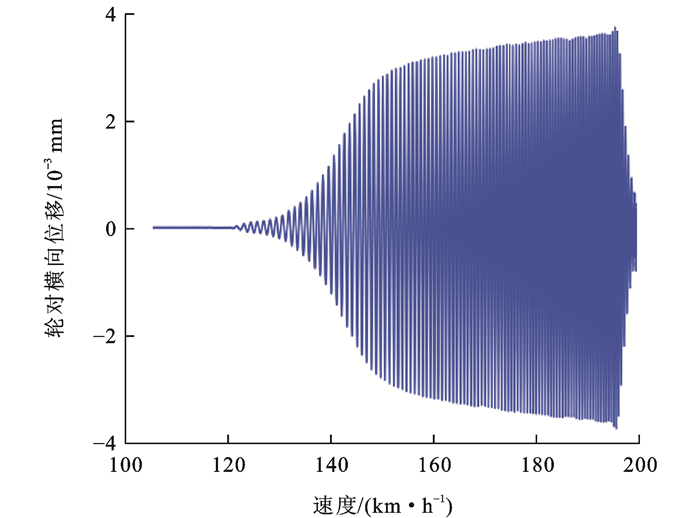
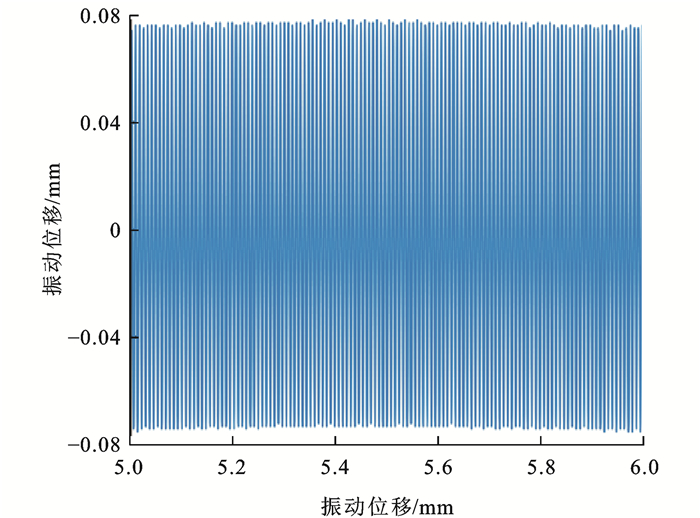
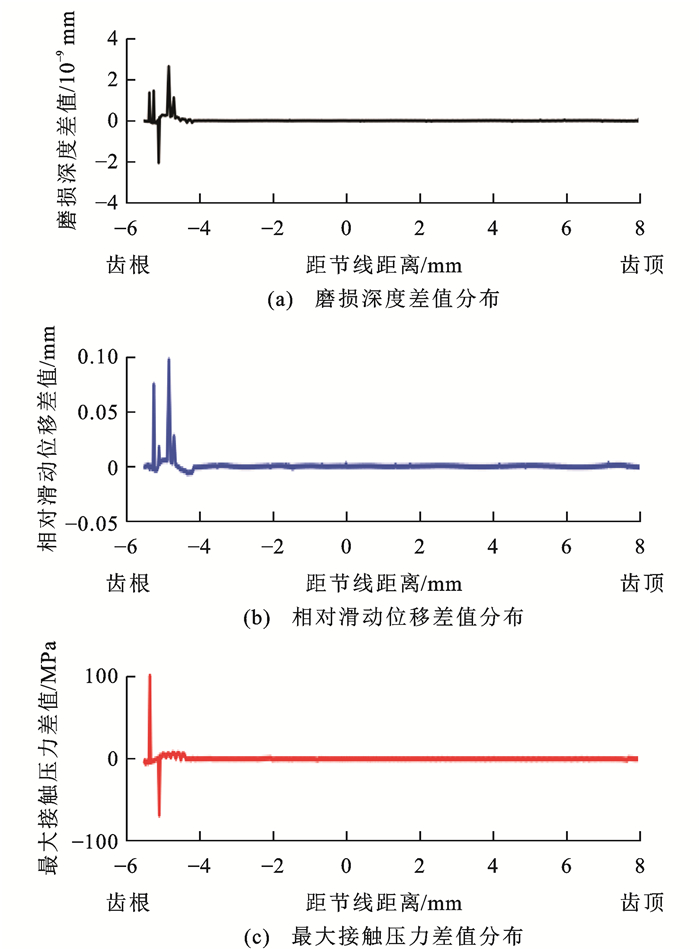
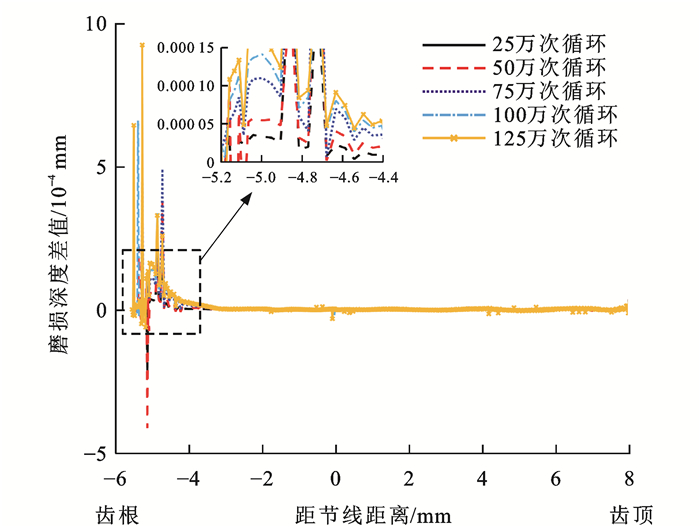
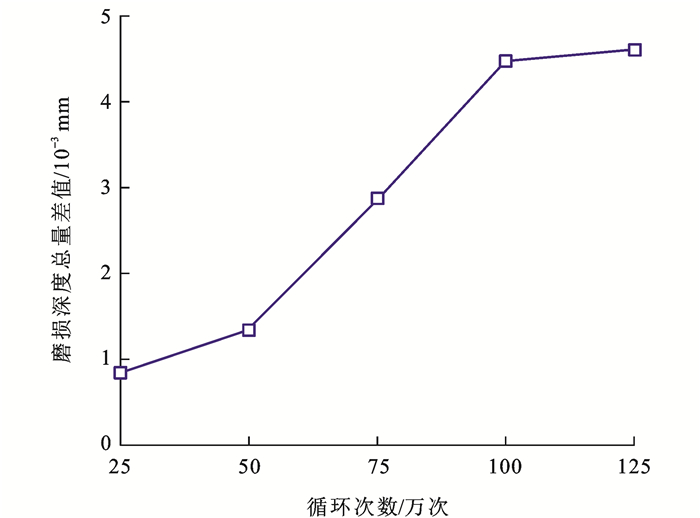
摘要:
通过Archard磨损公式和Hertz接触模型,建立了考虑动态磨损系数的机车齿轮磨损数值仿真模型,计算了理想情况下齿面磨损分布情况;利用ABAQUS二次开发UMESHMOTION子程序,结合ALE自适应网格,建立了齿轮磨损有限元模型,在仿真后通过MATLAB提取齿面磨损信息,并将有限元计算结果与数值仿真结果进行了对比;通过改变模型参数,研究了摩擦因数和中心距误差对齿面磨损的影响;基于多体动力学软件SIMPACK建模仿真得到了轮轨激励下从动齿轮垂向振动位移,并将其加载到有限元模型进行齿面磨损仿真计算。计算结果表明:2种计算方法得出的齿轮磨损分布情况较为一致,即主、从动齿轮最大磨损深度均在齿根处,节线处磨损深度为0,且节线两侧单双齿交替区域磨损深度均出现突变,磨损深度总量随摩擦因数的增大而增加,且均位于以节线为界靠近齿根处,当摩擦因数最大值取0.25时,磨损深度总量为3.104×10
-6
mm,而齿顶处相反;当中心距误差为负时,随着中心距的减少,磨损深度总量呈增大趋势,最大值为3.313×10
-6
mm,而当中心距误差为正时,随着中心距的增大,磨损深度总量变化甚微;轮轨外部激励会加剧齿根处磨损,影响齿轮寿命及行车安全。
更多>
2024, 24(2): 166-178.
doi:
10.19818/j.cnki.1671-1637.2024.02.011
摘要
(
1380
)
HTML
(
605
)
PDF (11663KB)
(
146
)
引用
(
)
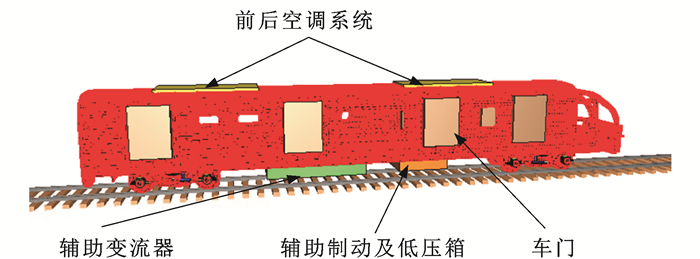
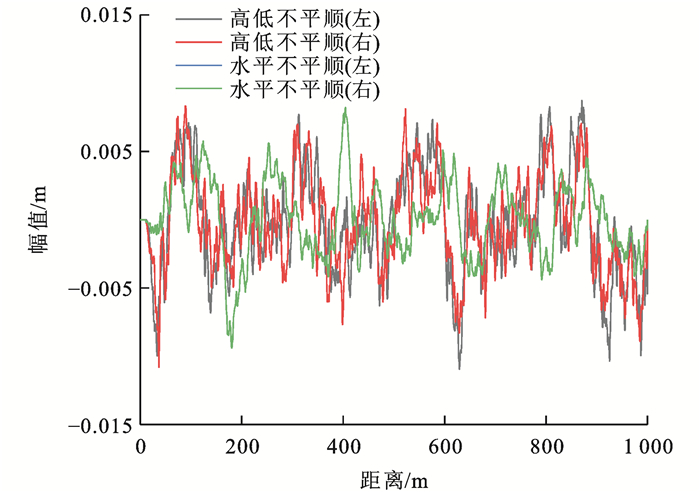
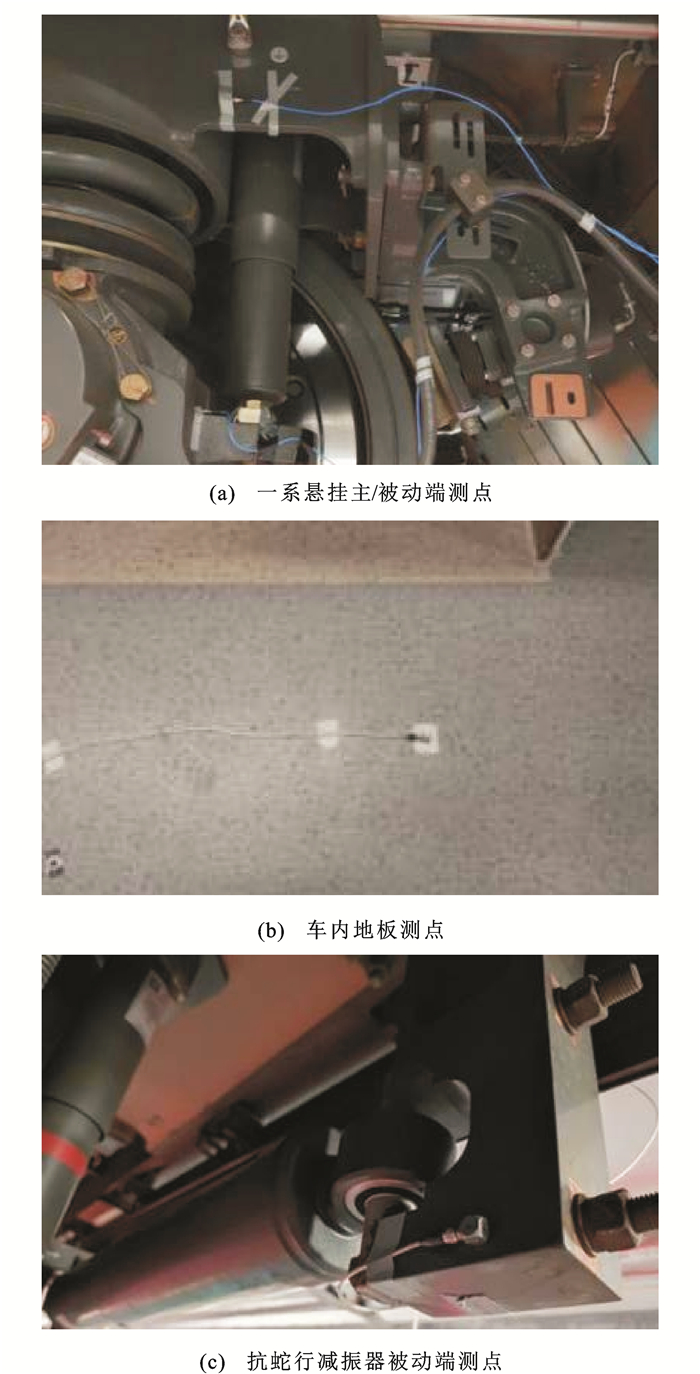
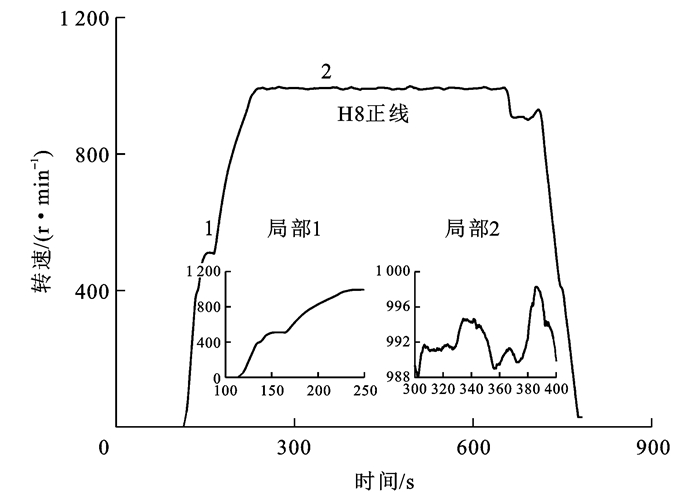
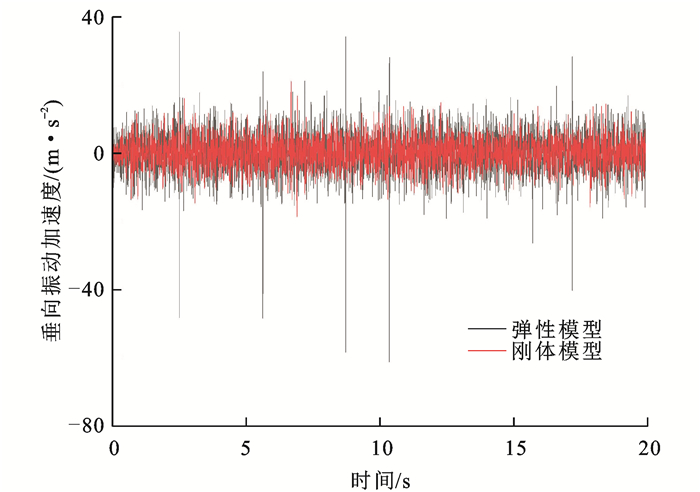
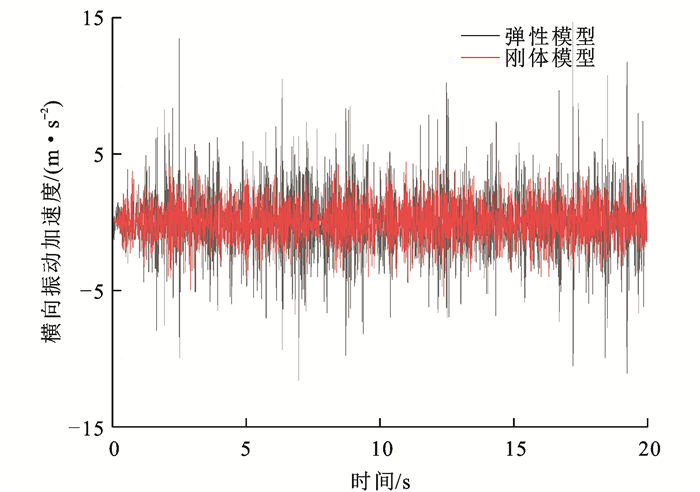
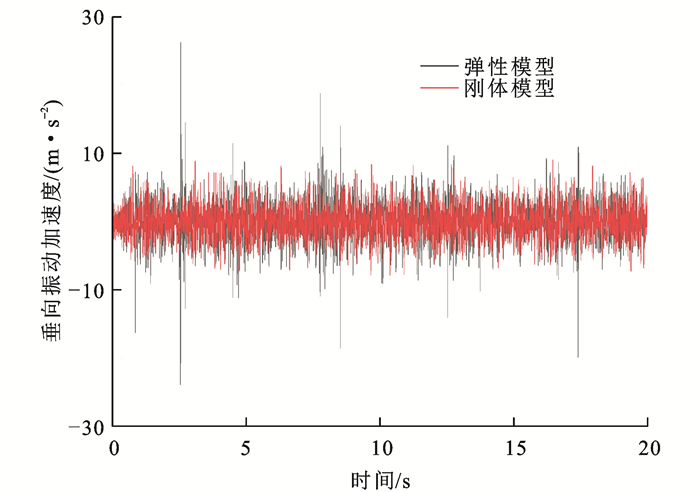
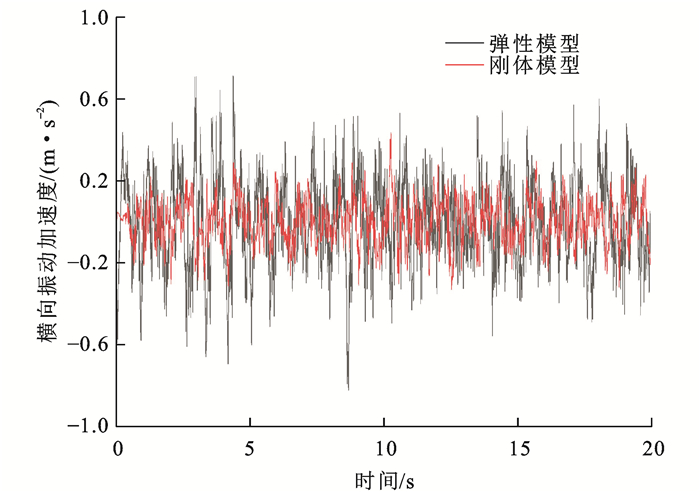
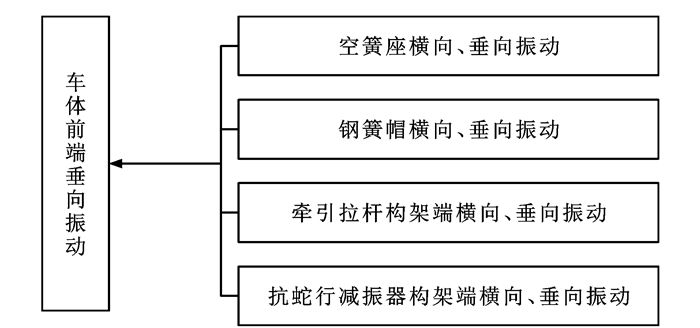
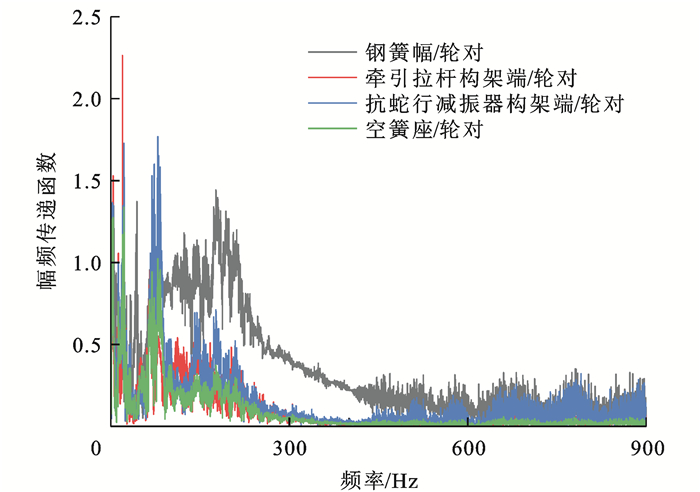
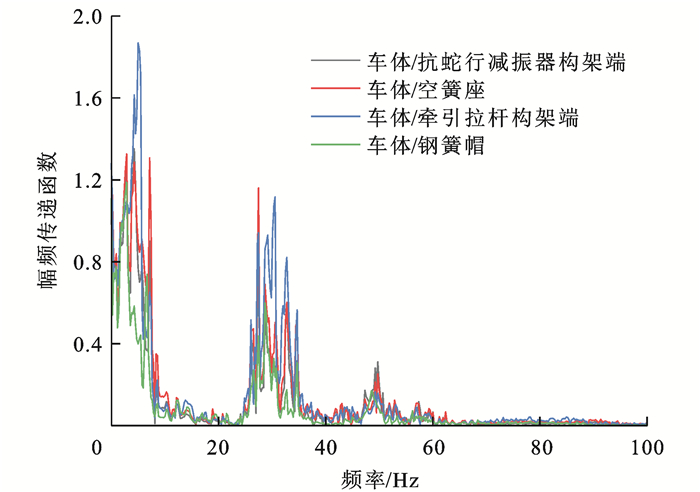
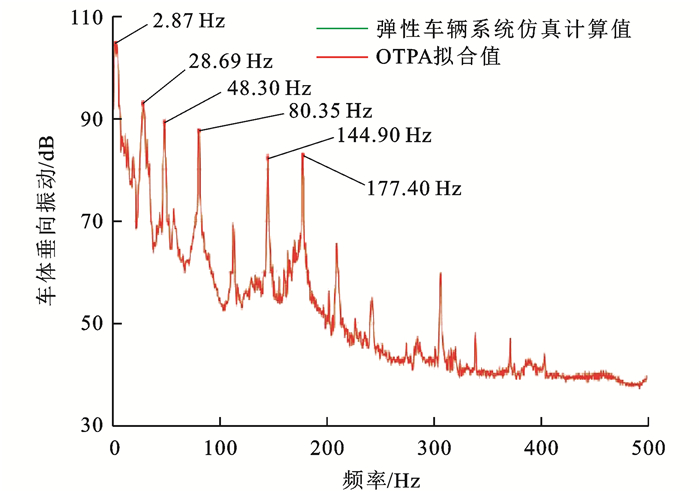
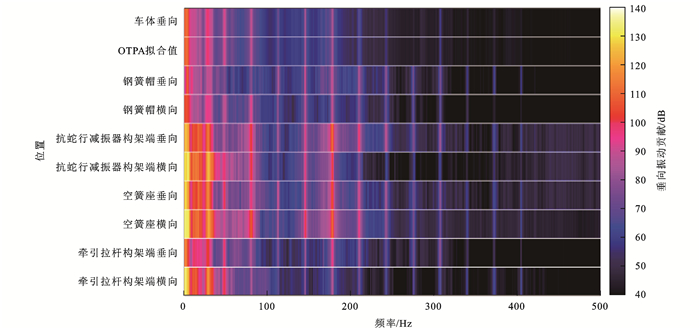
基于弹性车辆系统和OTPA方法的车辆振动传递特性分析
郭冰彬
,
罗志翔
,
肖乾
,
程玉琦
,
杨逸航
,
朱恩豪
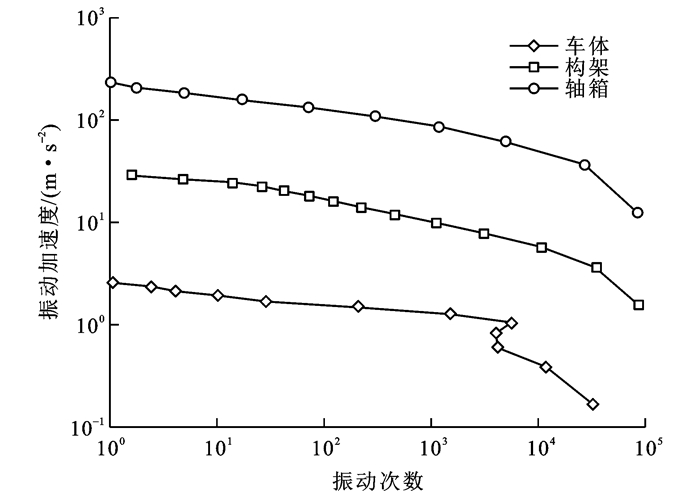
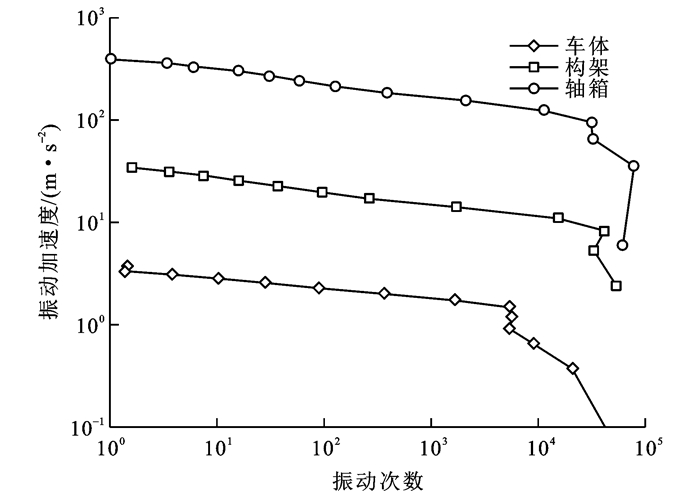
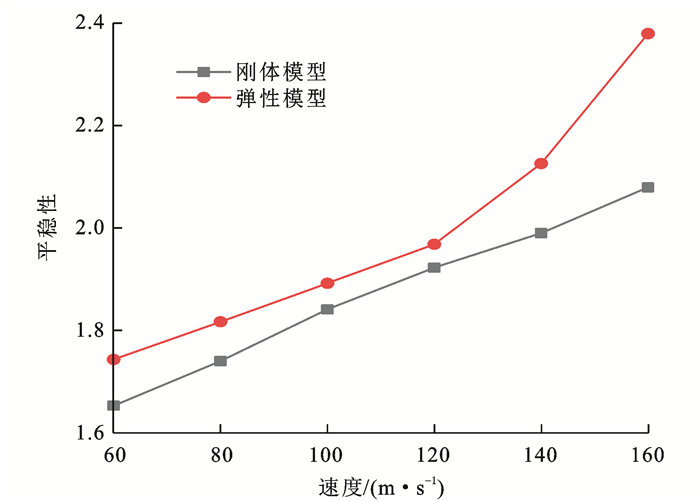
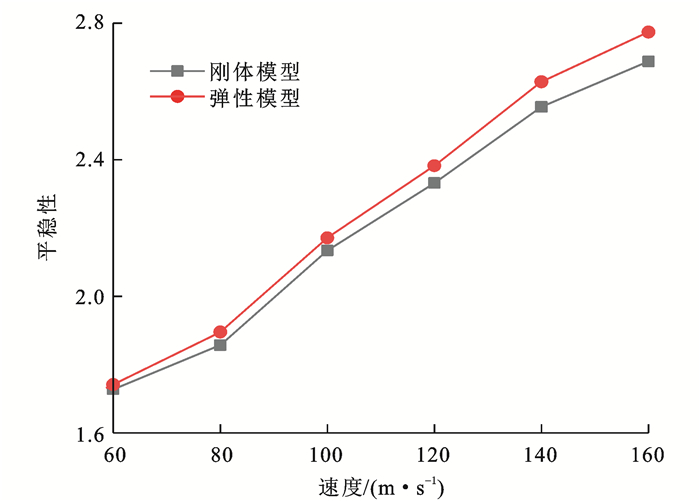
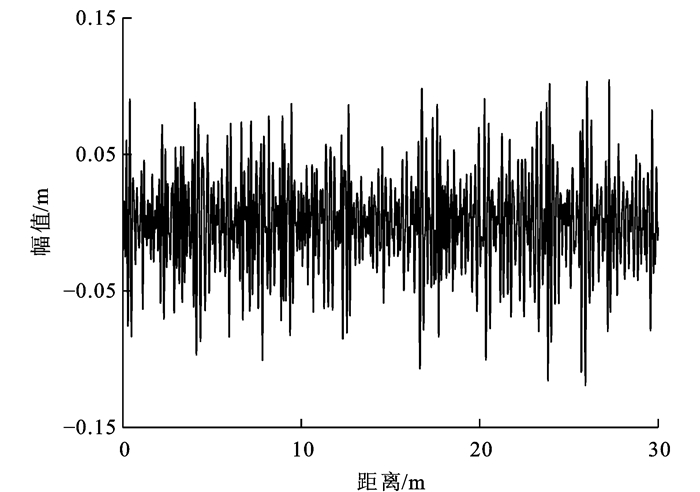
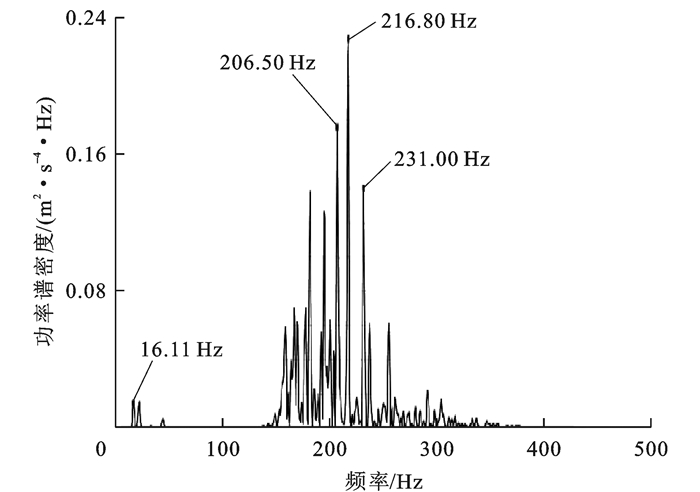
摘要:
为了准确分析轨道车辆在较宽频域范围内的振动特性及传递规律,提出了一种基于弹性车辆系统动力学仿真模型的工况传递路径分析(OTPA)方法;建立了包含柔性轮对、构架和车体的弹性车辆系统动力学模型和与之结构参数完全相同的刚体模型,从时域的角度研究了轮对、构架和车体的振动特性,并将仿真结果与实测数据进行了对比,探究了弹性处理方式对车辆振动的影响,得出了振动能量的衰减规律;从频域的角度研究了在实测钢轨垂向不平顺的激励下,弹性车辆系统的振动特性;运用OTPA方法仿真分析了钢轨垂向不平顺结合车轮多边形的复杂工况下,车辆系统从轮对到构架至车体这一自下而上的振动传递过程当中垂向振动的主要传递路径。研究结果表明:车辆系统的弹性处理方式对整车振动有重要影响,弹性模型的轮对、构架和车体的振动加速度相比于刚体模型在中低频范围内更接近实测值,轴箱、构架和车体的最大振动幅值分别为250~450、30~40、3~4 m·s
-2
,由轮对至构架到车体,振动幅值呈一个数量级衰减;弹性模型的平稳性指标大于刚体模型,并且速度越大趋势越明显,车辆的弹性振动对运行性能的影响随着速度的提高而增大;车辆系统在复杂工况下,振动主要通过一系钢弹簧传递至构架,再通过空气弹簧和牵引拉杆传递至车内地板。
更多>
2024, 24(2): 179-192.
doi:
10.19818/j.cnki.1671-1637.2024.02.012
摘要
(
1251
)
HTML
(
299
)
PDF (14689KB)
(
136
)
引用
(
)
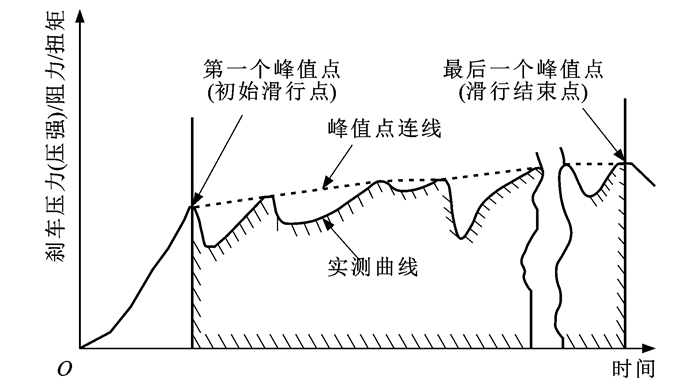
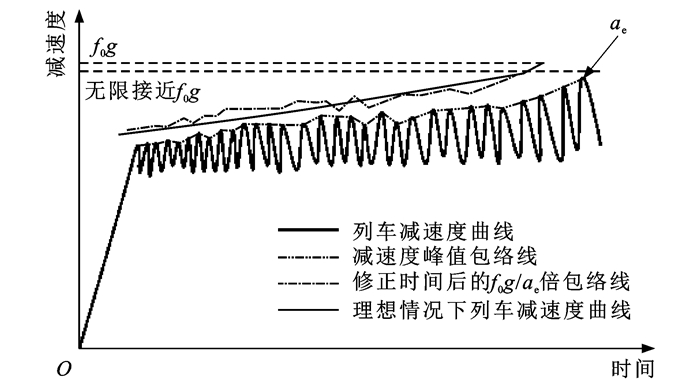
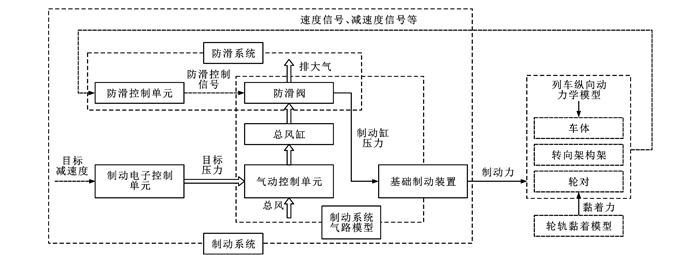
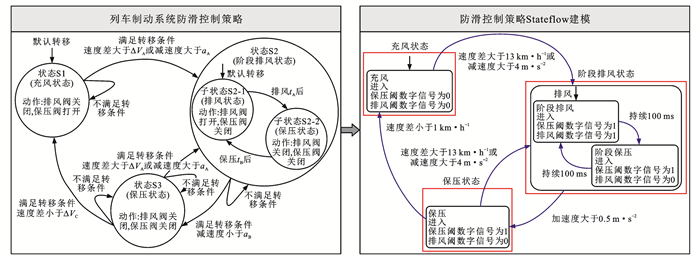
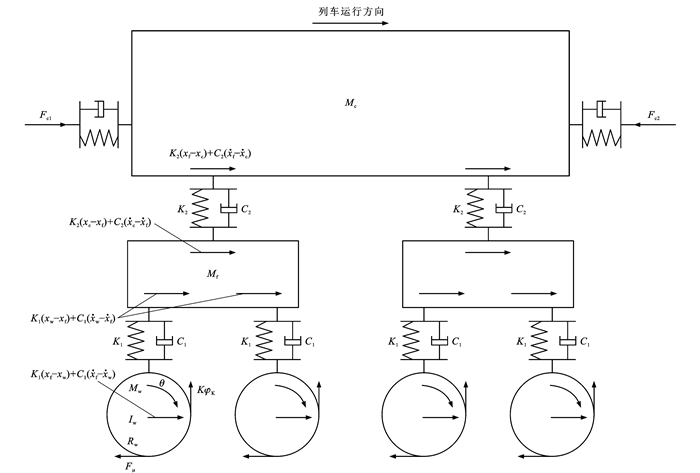
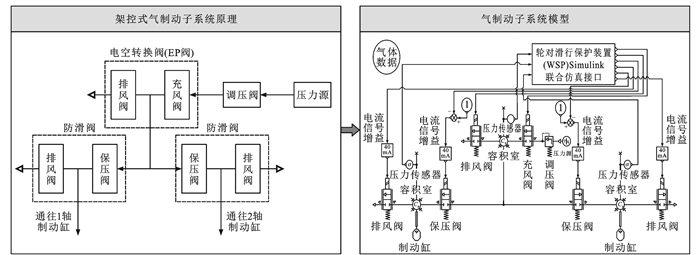
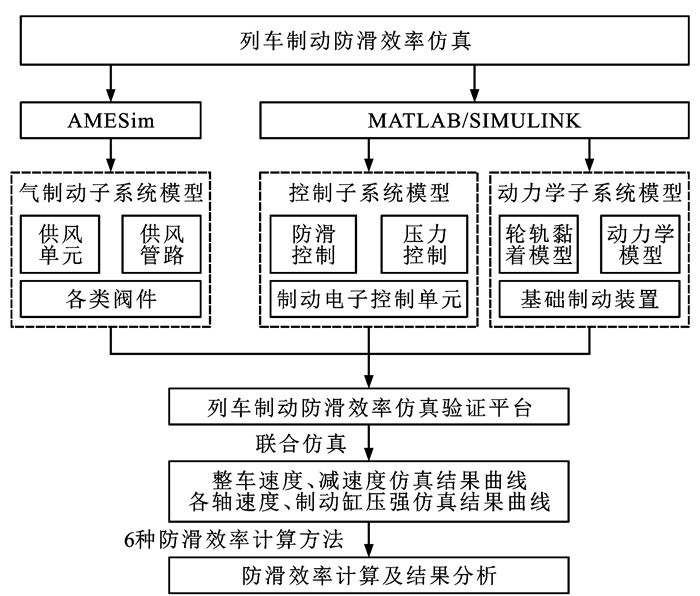
基于减速度包络线修正的新型防滑效率计算方法
翟耕慰
,
田春
,
马天和
,
陈超
,
王国壮
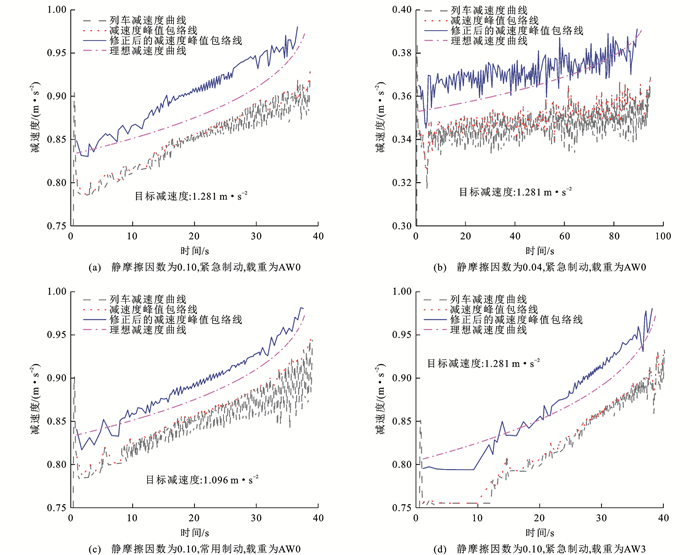
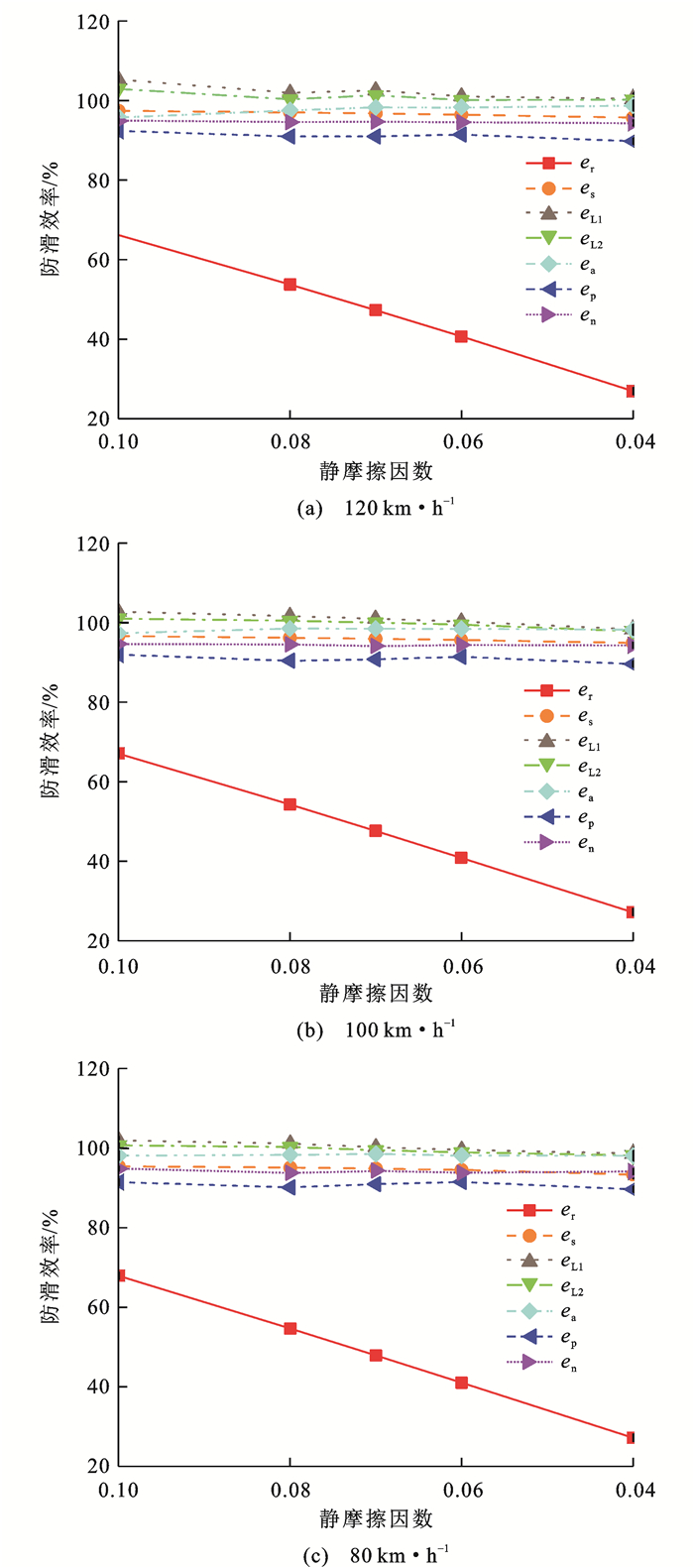
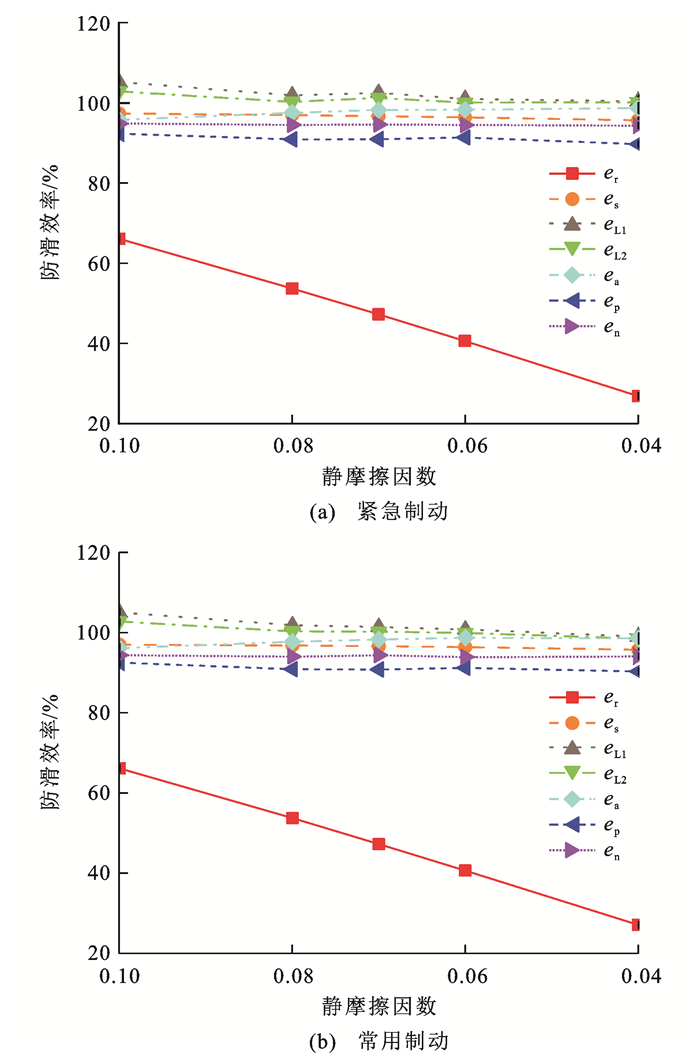
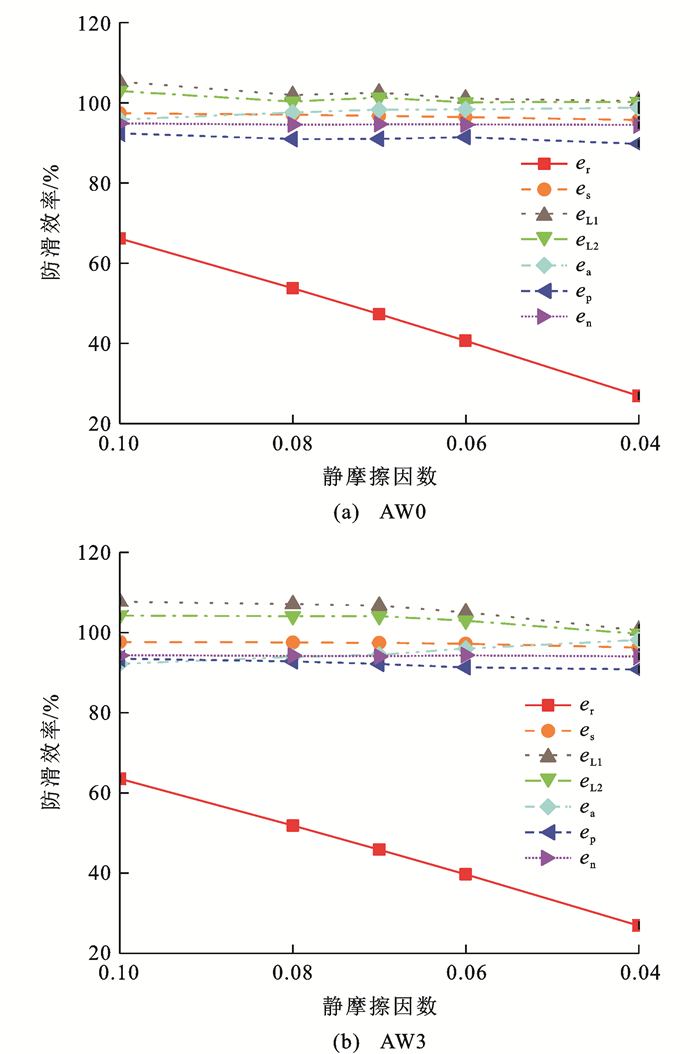
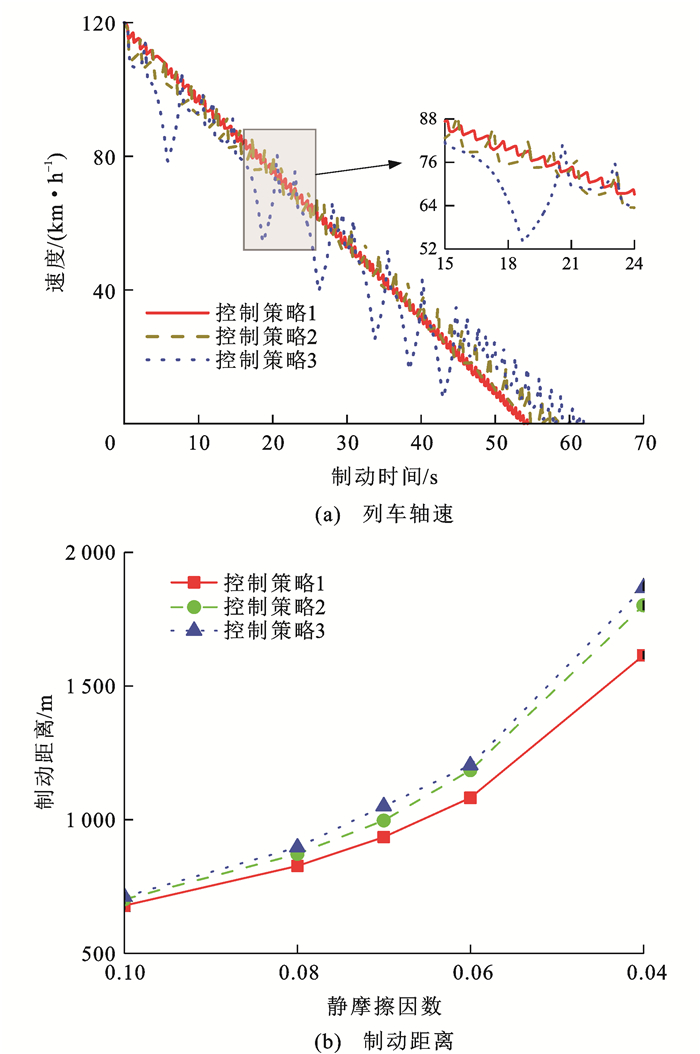
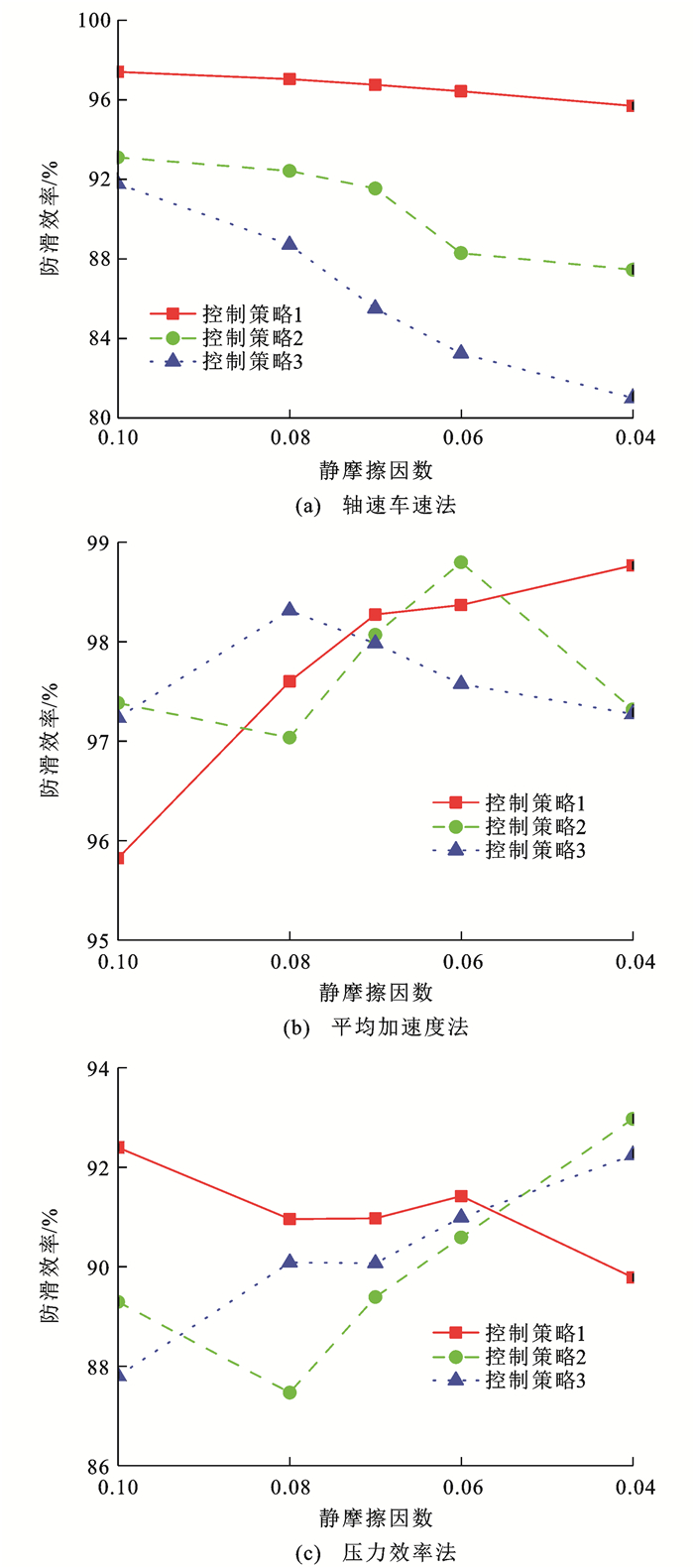
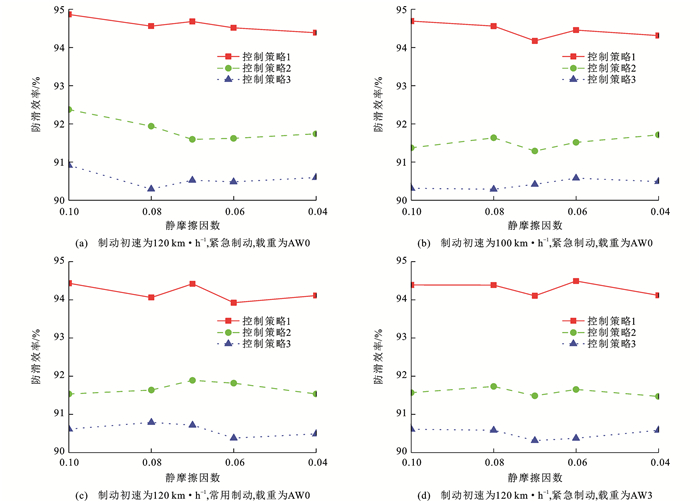
摘要:
为解决现有防滑效率计算方法准确性低、评价效果差等问题,在深入分析列车制动防滑过程中轮轨黏着系数变化规律及特点的基础上,修正了列车制动防滑过程减速度峰值包络线,使其接近理想减速度曲线,进而提出一种新型防滑效率计算方法;结合列车制动防滑系统实际工作原理,搭建了列车制动防滑效率仿真验证平台,在仿真层面验证了减速度包络线修正的正确性和新型防滑效率计算方法的准确性;在不同仿真工况下对比分析了6种防滑效率计算方法的合理性和防滑性能评价效果,并基于实车防滑试验验证了新方法的实用性。研究结果表明:搭建的列车制动防滑效率仿真验证平台所得列车制动时间、制动距离等计算结果与相同工况下实车防滑试验结果的相对误差不超过5%,可用来验证和分析防滑效率计算方法与防滑性能评价效果;修正后的减速度峰值包络线与理想减速度曲线的相对误差不超过4.5%;当防滑控制策略不变时,新型防滑效率计算方法对列车在不同制动级位和黏着水平下的仿真结果相差不超过1.1%,试验结果相差不超过3.5%,且防滑效率均小于100%,稳定性良好;采用不同防滑控制策略时,新型防滑效率计算方法的仿真结果存在明显差异,且不同控制策略对应的防滑效率与其防滑性能正相关,能体现出不同防滑系统间的性能差异;新型防滑效率计算方法能通过实车防滑试验计算防滑效率,为实车提供了一种新的防滑性能评价手段。
更多>
2024, 24(2): 193-206.
doi:
10.19818/j.cnki.1671-1637.2024.02.013
摘要
(
1561
)
HTML
(
442
)
PDF (12378KB)
(
127
)
引用
(
)
交通运输规划与管理
智能网联环境下近邻匝道交通耦合自组织方法
马庆禄
,
王欣宇
,
张书
,
段学锋
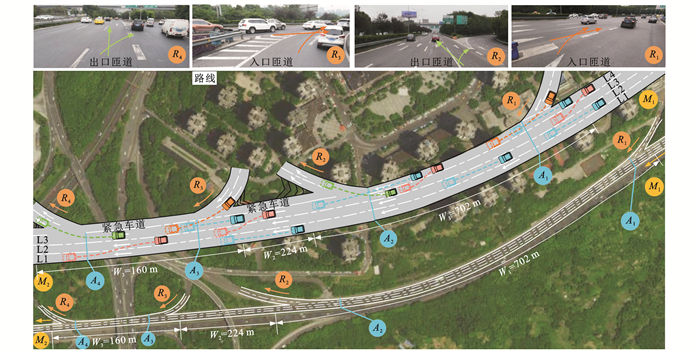
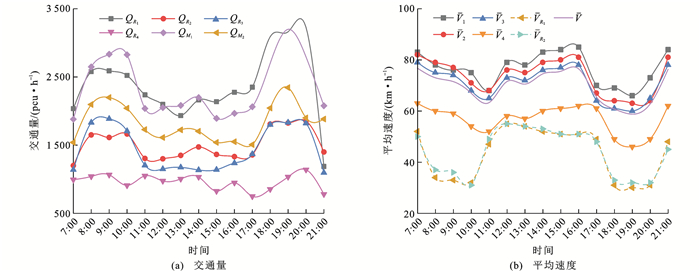
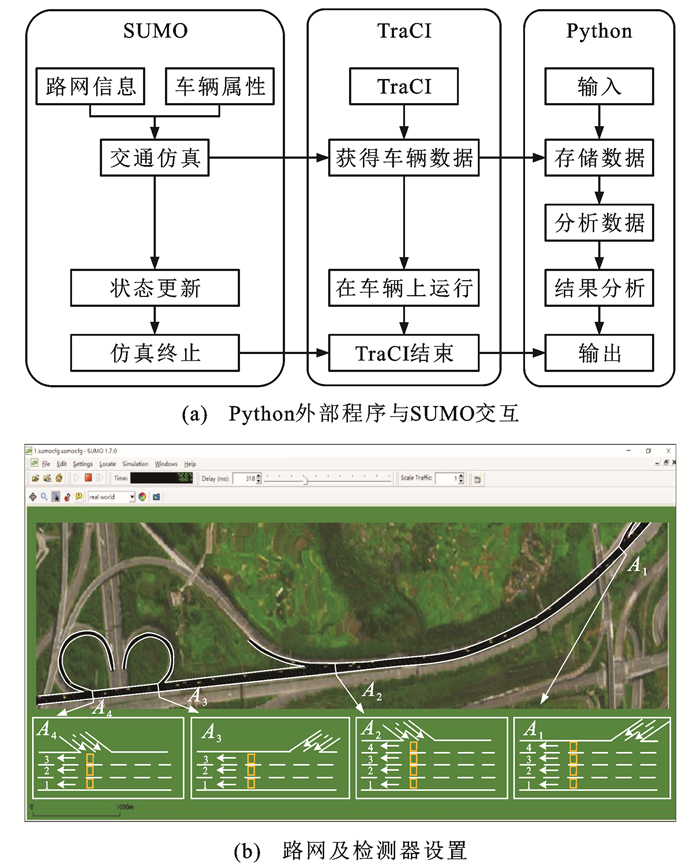
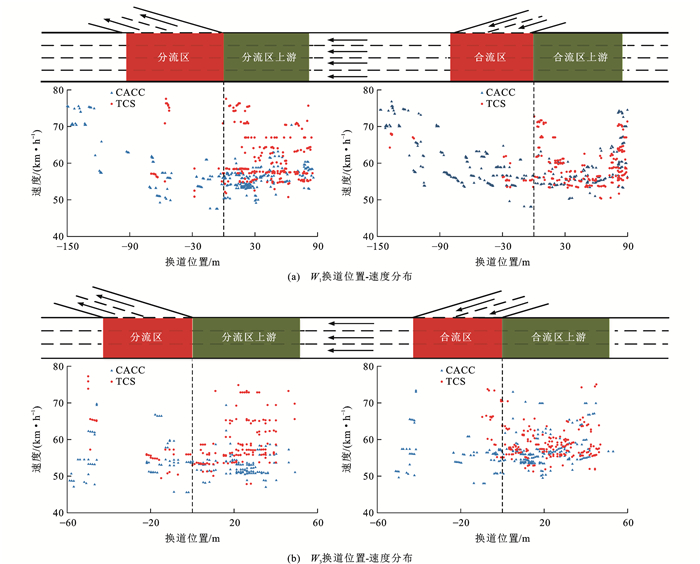
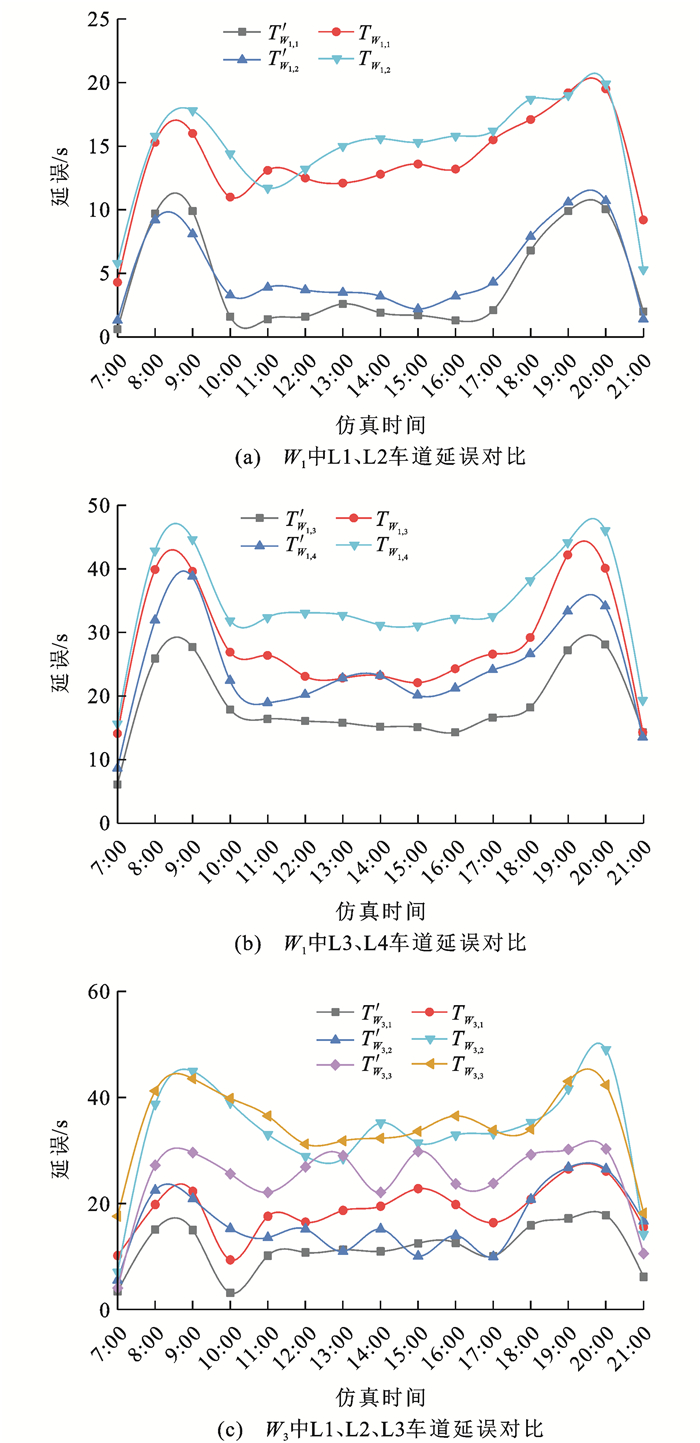
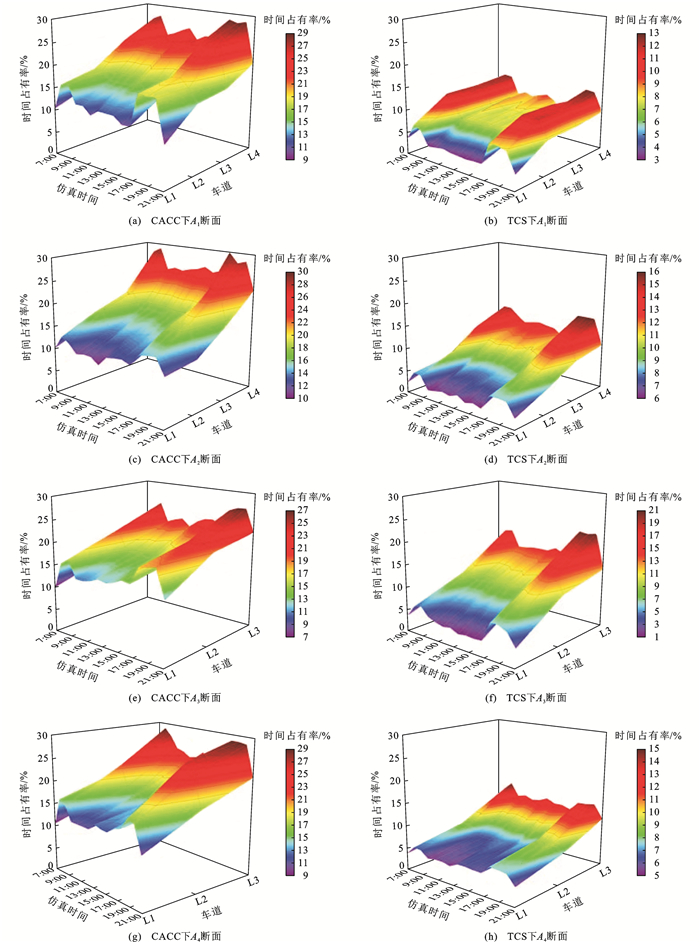
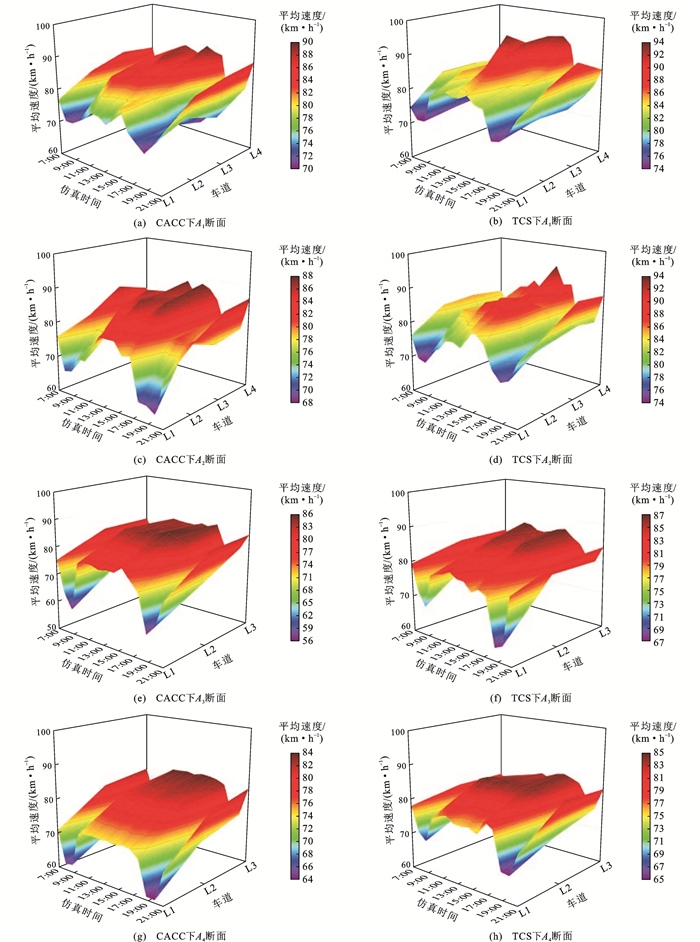
摘要:
为改善智能网联环境下匝道合流区通行安全与效率问题,提出了一种近邻匝道交通耦合自组织方法,通过建立主线车流间隙与匝道车辆速度优化匹配模型,以实现对主线最外侧车道总体车头间距的优化调整,在保证汇入安全的前提下提升了近邻匝道内的车辆通行效率;选取重庆市内环快速路上东环立交附近2个近邻匝道为研究原型,利用在线地图结合无人机航拍以及定点摄像等数据采集方式对试验路段进行实地调查;在智能网联环境下,分别运用协同自适应巡航控制(CACC)和交通耦合自组织方法(TCS),采用Python、SUMO和TraCI对试验路段车辆运行情况进行联合仿真。研究结果表明:相较于CACC,TCS的换道次数从65.52次降至52.64次,下降了19.87%,有效缓解了近邻匝道内的交通冲突;平均延误从24.53 s降至14.39 s,下降了70.38%,其中平峰期降低了77.71%,高峰期只降低了34.50%,相较于高峰期,在平峰期的运行效率提升较大;时间占有率从18.70%降至8.63%,下降了53.86%,不同车道间的时间占有率之差降低至6.00%,即车辆在不同车道上的分布更平均;平均速度从78.31 km·h
-1
上升至80.78 km·h
-1
,提升了3.06%,有效缓解了合流区和分流区附近的减速情况。
更多>
2024, 24(2): 207-220.
doi:
10.19818/j.cnki.1671-1637.2024.02.014
摘要
(
1807
)
HTML
(
396
)
PDF (18764KB)
(
192
)
引用
(
)
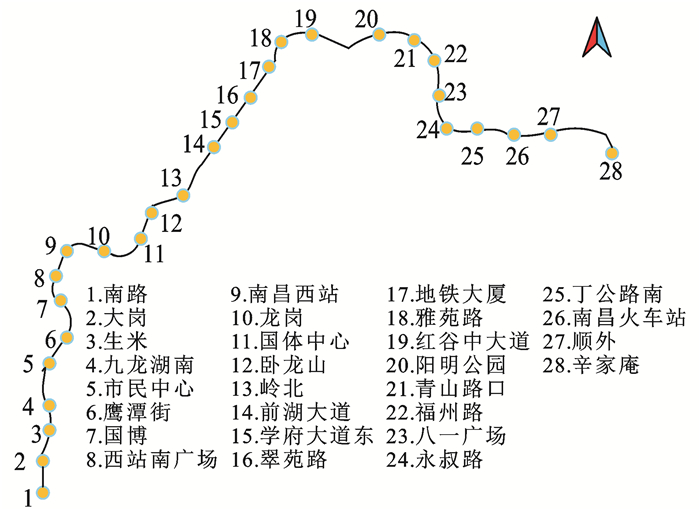
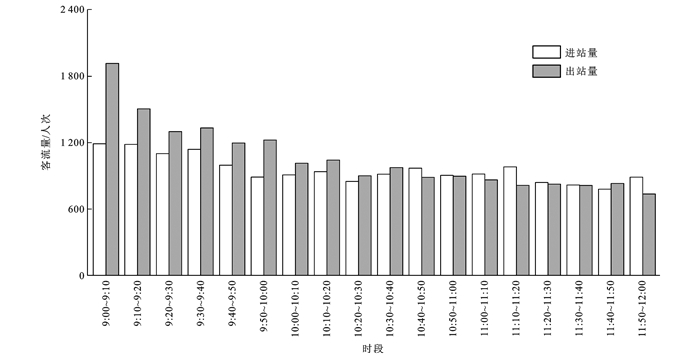
基于柔性时间窗的地铁货物车厢配置与装载优化
石俊刚
,
王松
,
郭军华
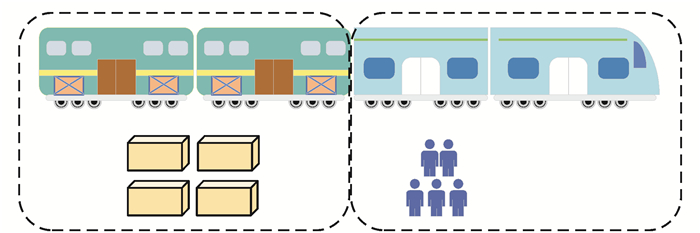
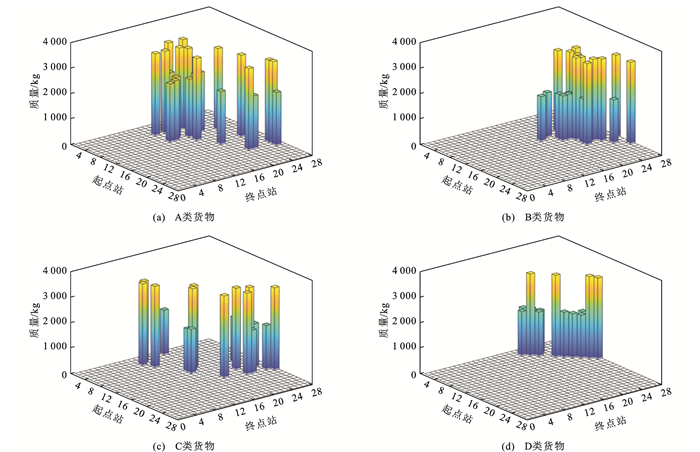
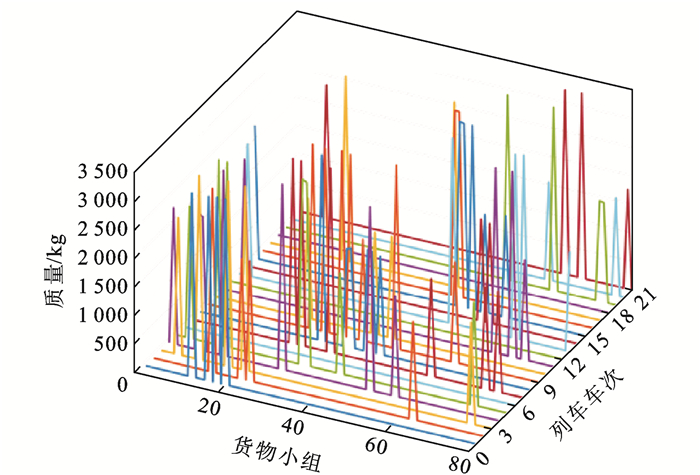
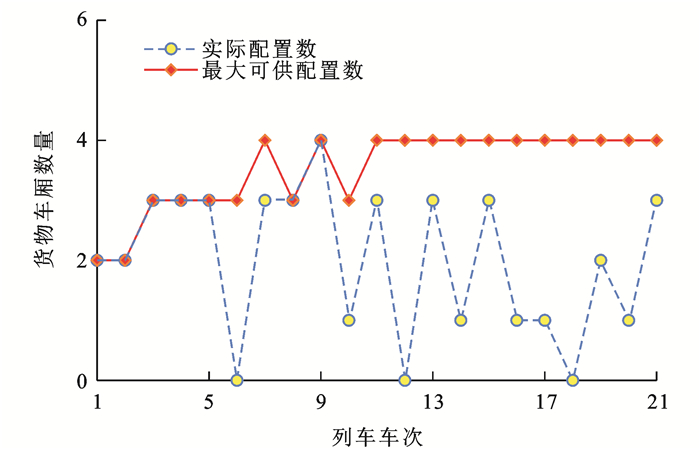
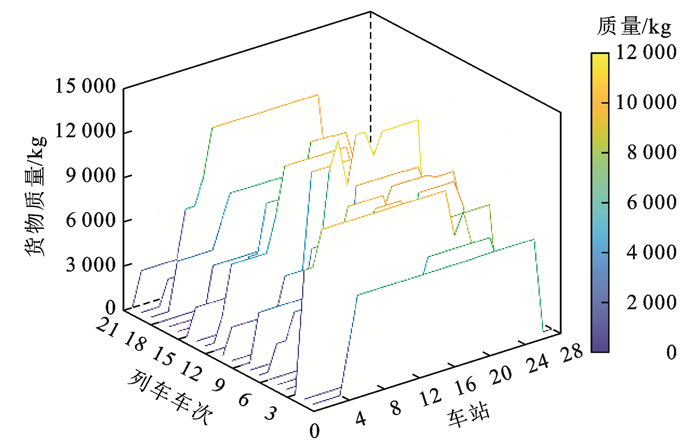
摘要:
为缓解城市道路拥堵,提高城市物流系统周转效率,提出了利用地铁线路在非高峰时段开展货物运输;基于客货共载运输模式,在满足乘客出行需求的前提下,推算了各列车最多可挂载的货物车厢数,在此基础上进行货物车厢配置与装载方案优化;以列车货物车厢配置计划与货物装载分配方案为决策变量,考虑货物送达柔性时间窗与容量限制的约束条件,以配送服务惩罚和货物车厢挂载成本最低为目标,构建了整数线性规划模型,并利用CPLEX优化软件进行模型求解。试验结果表明:为满足4类不同送达时限货物运输需求,方案共配置货运车厢42节,运营总成本为16 970元;随着延迟送达惩罚系数增大,货物延迟送达率呈快速降低趋势,当延迟送达惩罚系数由5元·h
-1
增加到100元·h
-1
时,延迟送达率由22.50%降至8.75%,随着提前送达惩罚系数增大,货物提前送达率同样呈现快速降低趋势,当提前送达惩罚系数由0增加到40元·h
-1
时,提前送达率由37.50%降低至3.75%,说明构建的模型对货物服务时效反应较为灵敏,同时有效满足货物送达服务时限要求;当某类货物惩罚系数增加时,该货物送达的提前率或延迟率会降低,整体表现为货物送达的准点率提高,服务水平得到改善,说明优化模型对不同类型货物的送达惩罚系数反应较为敏感;随着客运满载系数的增大,货物送达的准点率呈现递增趋势,货物送达提前率与延迟率总体上呈下降趋势,方案运营总成本也呈递减趋势,说明适当提高客运满载率阈值可以缓解部分列车运力,进而提高货物送达的准点率。
更多>
2024, 24(2): 221-231.
doi:
10.19818/j.cnki.1671-1637.2024.02.015
摘要
(
1812
)
HTML
(
530
)
PDF (6245KB)
(
176
)
引用
(
)
基于相对零主观算法的机场智慧化程度评价
张锐
,
黄卫
,
马涛
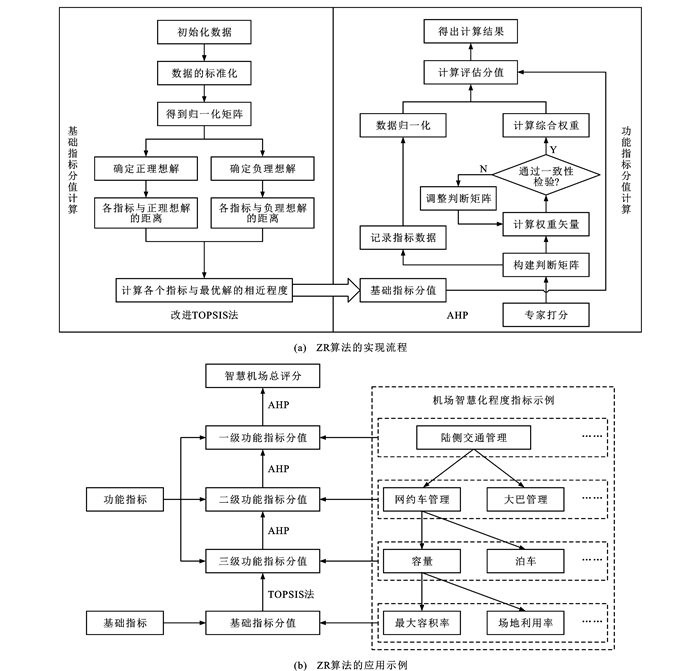
摘要:
为了解决机场智慧化程度评价过程中遇到的指标类型繁多、覆盖范围广泛,且指标间关系错综复杂、量纲不统一、难以进行定量分析的难题,优选了传统的评价方法,并将改进后的优劣解距离(TOPSIS)法和层次分析法(AHP)进行融合,提出了专门针对机场智慧化程度评价的相对零主观(ZR)算法;为确保评价结果的准确,利用专家意见与客观判断结果对机场智慧化程度评价体系中的功能指标权重进行了计算,基于江苏省某机场通过ZR算法进行了机场智慧化程度评价。研究结果表明:2018年某机场智慧化程度评分为65.64,2022年某机场智慧化程度评分为77.08,说明机场内各项智慧智能设备在不断更新迭代,机场智慧化程度也在不断提高;2022年,机场应急保障下的二级安全运行监测指标较2018年提高了65.7%,人身安全检查指标提高了17.1%,应急与安全指标提高了16.2%,主要原因在于某机场近年来大力发展人工智能分析系统,引进了航站楼出入口人脸识别系统,完善了站坪作业安全监控平台,在一定程度上提高了机场安全的智慧化程度;陆侧交通指标2018年评分为2.34,2022年为2.54,评分变化较小,因此,智慧化程度发展迟缓,在未来的建设中需进一步加强资源投入。
更多>
2024, 24(2): 232-242.
doi:
10.19818/j.cnki.1671-1637.2024.02.016
摘要
(
1947
)
HTML
(
423
)
PDF (1188KB)
(
152
)
引用
(
)
交通信息工程及控制
设置排阵式预信号的干线交通信号协调控制优化
李岩
,
史旋
,
南斯睿
,
朱才华
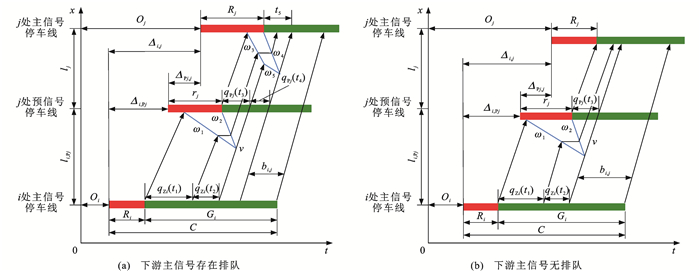
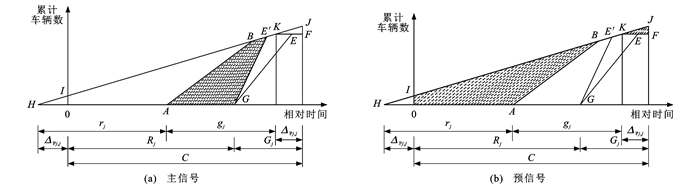
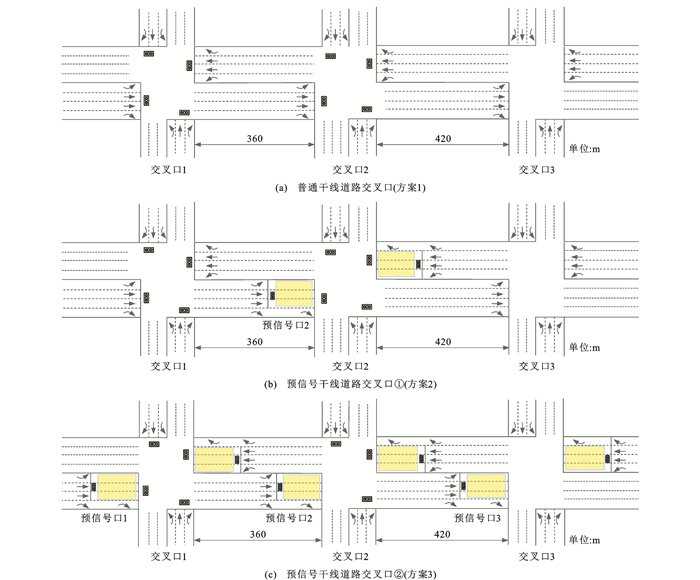
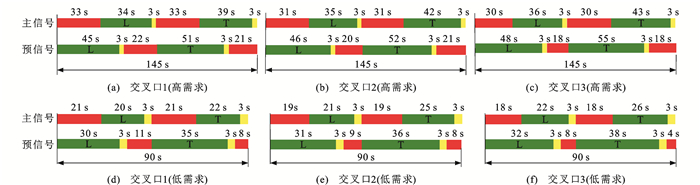
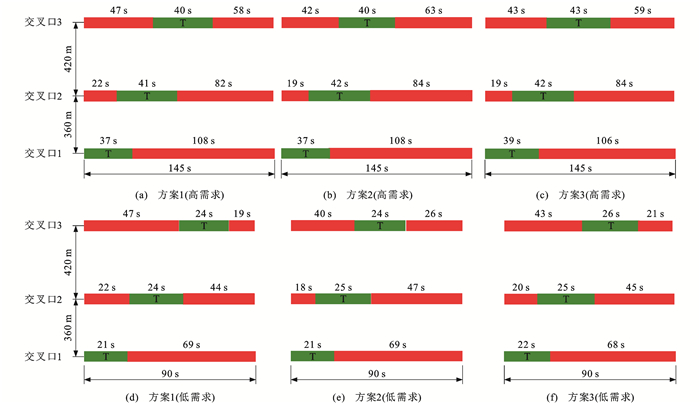
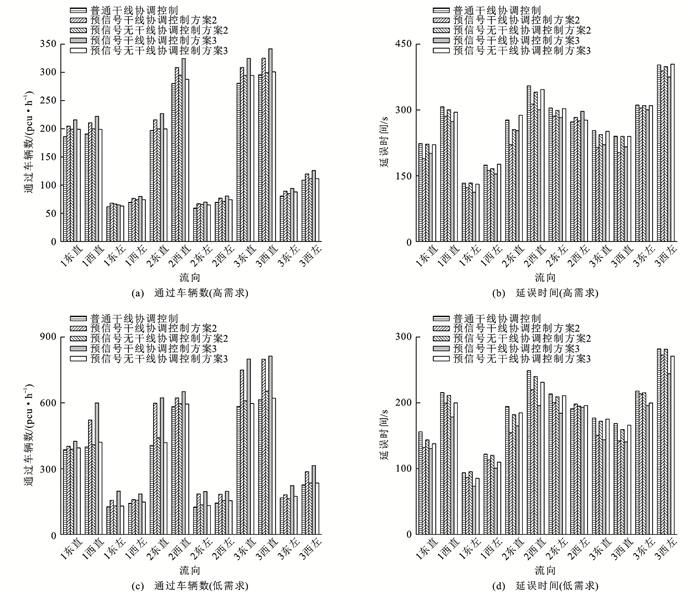
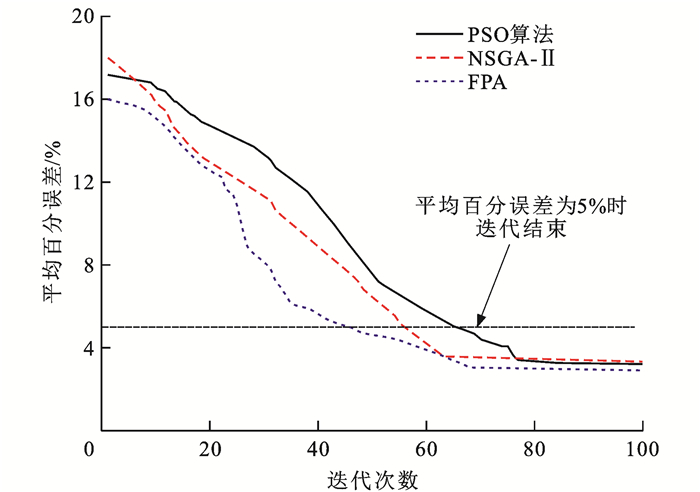
摘要:
为提升干线道路整体的车流运行效率,建立了一种优化设置排阵式预信号的干线交通信号协调控制系统配时方案的双层模型,并提出对应求解算法;双层模型的上层模型为主信号间相位差优化模型,采用遍历搜索算法优化主信号各交叉口间的相位差;下层模型是以通过车辆数、车均延误为优化目标的多目标优化模型,建立了多目标花朵授粉算法(FPA)对其求解;双层模型中的交通参数通过冲击波建模进行关联,通过上下层模型的迭代求得参数的最优解;以设置排阵式预信号后3个连续交叉口为研究对象,应用提出模型优化高、低2种交通需求下的干线道路交通信号协调配时方案,通过SUMO软件测试所选方案的有效性。研究结果表明:该双层模型能够优化设置排阵式预信号的干线交通信号协调配时方案,与传统干线信号协调控制方案相比,提出方法的配时方案在高、低交通需求下系统通过车辆数可分别增加16%~35%与8%~17%,延误分别降低7%~17%与2%~16%;相较于粒子群优化(PSO)算法与二代非支配排序遗传算法(NSGA-Ⅱ),FPA达到指定精度要求的迭代次数分别减少13和24次。通过仿真结果可知,所提出模型可进一步提升高需求状况下道路的运行效率。
更多>
2024, 24(2): 243-253.
doi:
10.19818/j.cnki.1671-1637.2024.02.017
摘要
(
1695
)
HTML
(
449
)
PDF (9128KB)
(
165
)
引用
(
)
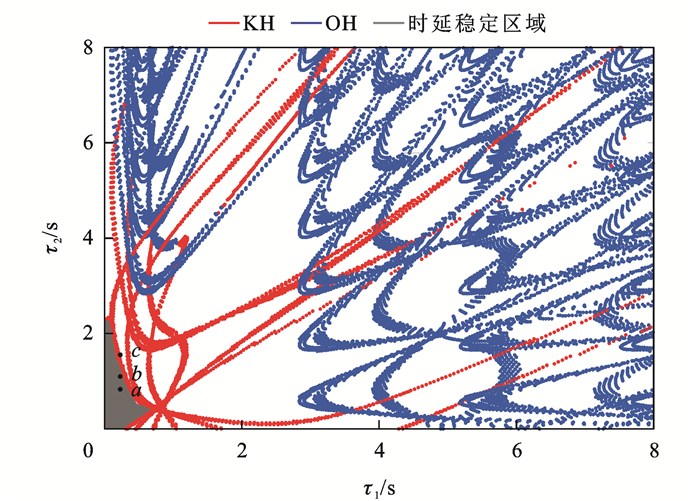
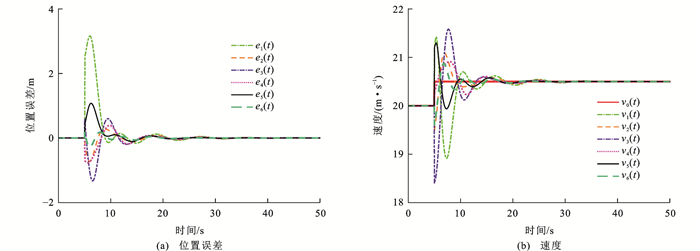
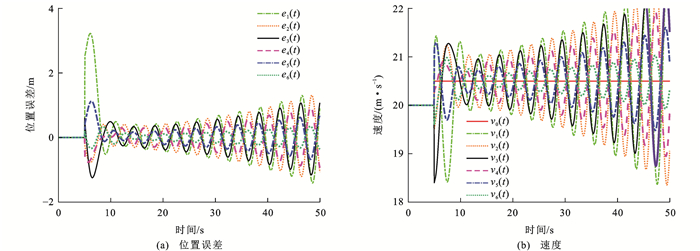
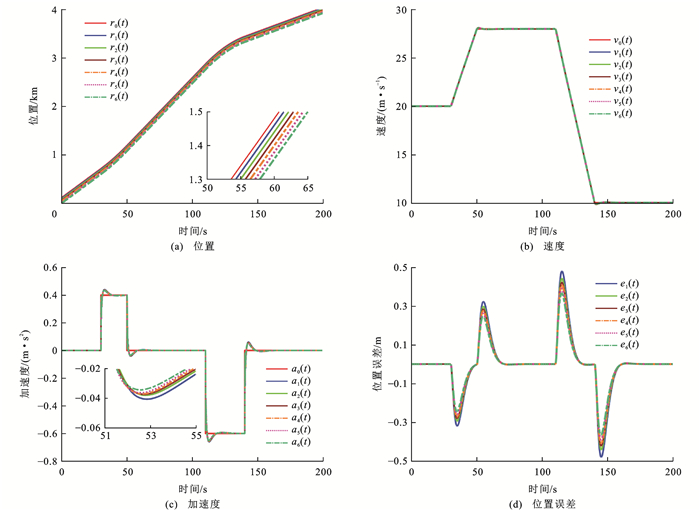
考虑3种时延的车辆队列控制系统稳定性
朱旭
,
孙卓
,
张泽华
,
闫茂德
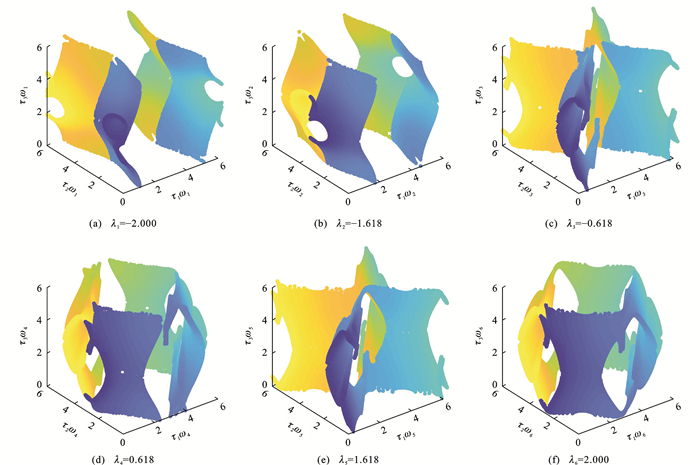
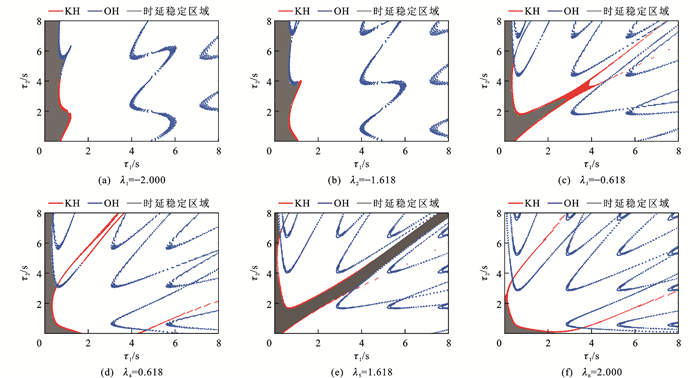
摘要:
针对含输入时延、跟随车之间的通信时延、领航车广播时延的车辆队列控制系统,研究了其内部稳定性和队列稳定性;在内部稳定性方面,提出了一种融合克罗内克和与特征根聚类(CTCR)法的方法,获得了系统内部稳定的充分必要条件;在队列稳定性方面,为了保证干扰沿车辆队列向后传播不扩散,给出了队列稳定的充分条件,揭示了队列稳定性独立于跟随车之间的通信时延;在此基础上,给出了可保证队列稳定的时延上界与车辆控制器增益设计范围。仿真结果表明:当满足所提稳定性条件时,车辆队列控制系统可同时保持内部稳定和队列稳定;所提内部稳定性方法求解的时延边界是完整、精确的,理论推导结果与仿真试验结果的误差小于0.1 s,且仿真时间比Bézout结式消元快2个数量级,比Sylvester结式消元快3个数量级,表明该方法大幅度降低了传统特征根聚类法的运算量;车间状态误差可在15 s内快速减小并趋近于0;在所有车辆恒速行驶时,车间保持50 m期望安全距离;在领航车以0.4 m·s
-2
加速和0.6 m·s
-2
减速过程中,跟随车的速度和加速度随领航车变化,车辆位置误差小于0.5 m,且沿车辆队列向后传播不扩散。
更多>
2024, 24(2): 254-266.
doi:
10.19818/j.cnki.1671-1637.2024.02.018
摘要
(
1750
)
HTML
(
430
)
PDF (13454KB)
(
171
)
引用
(
)
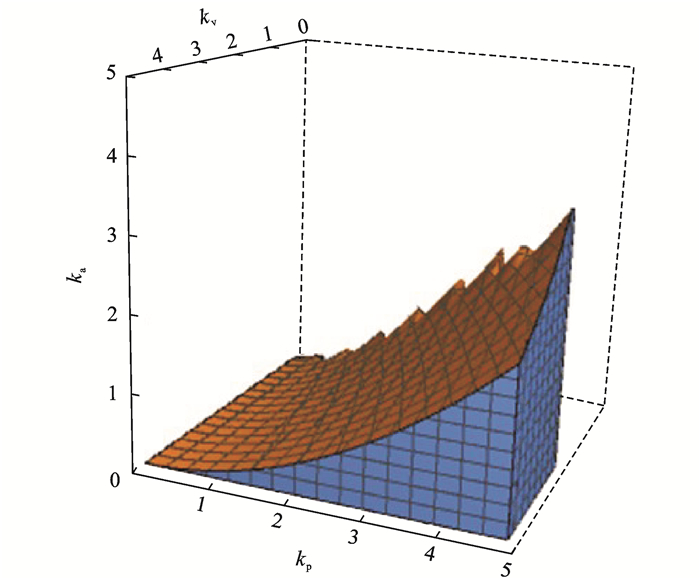
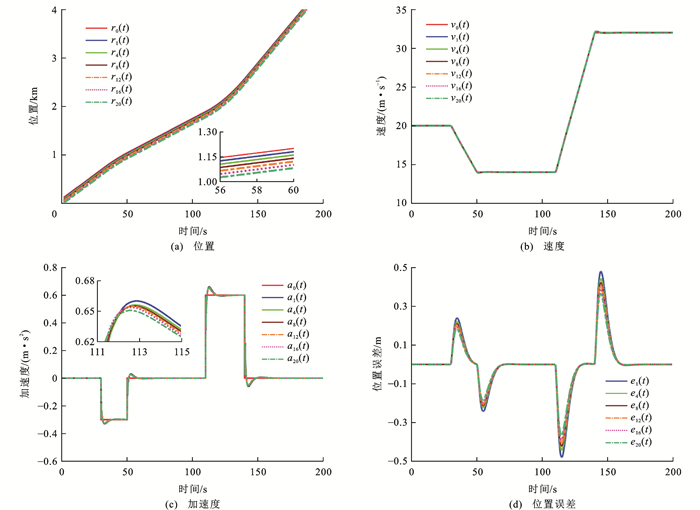
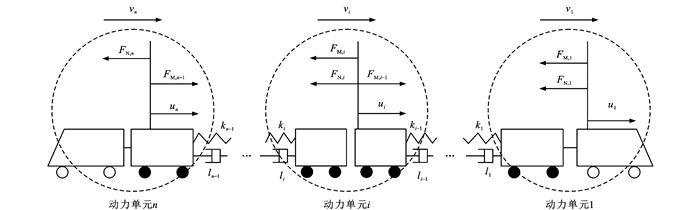
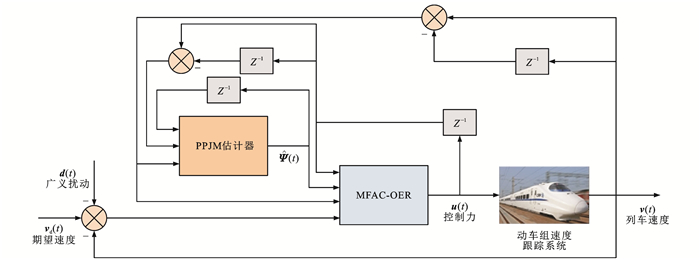
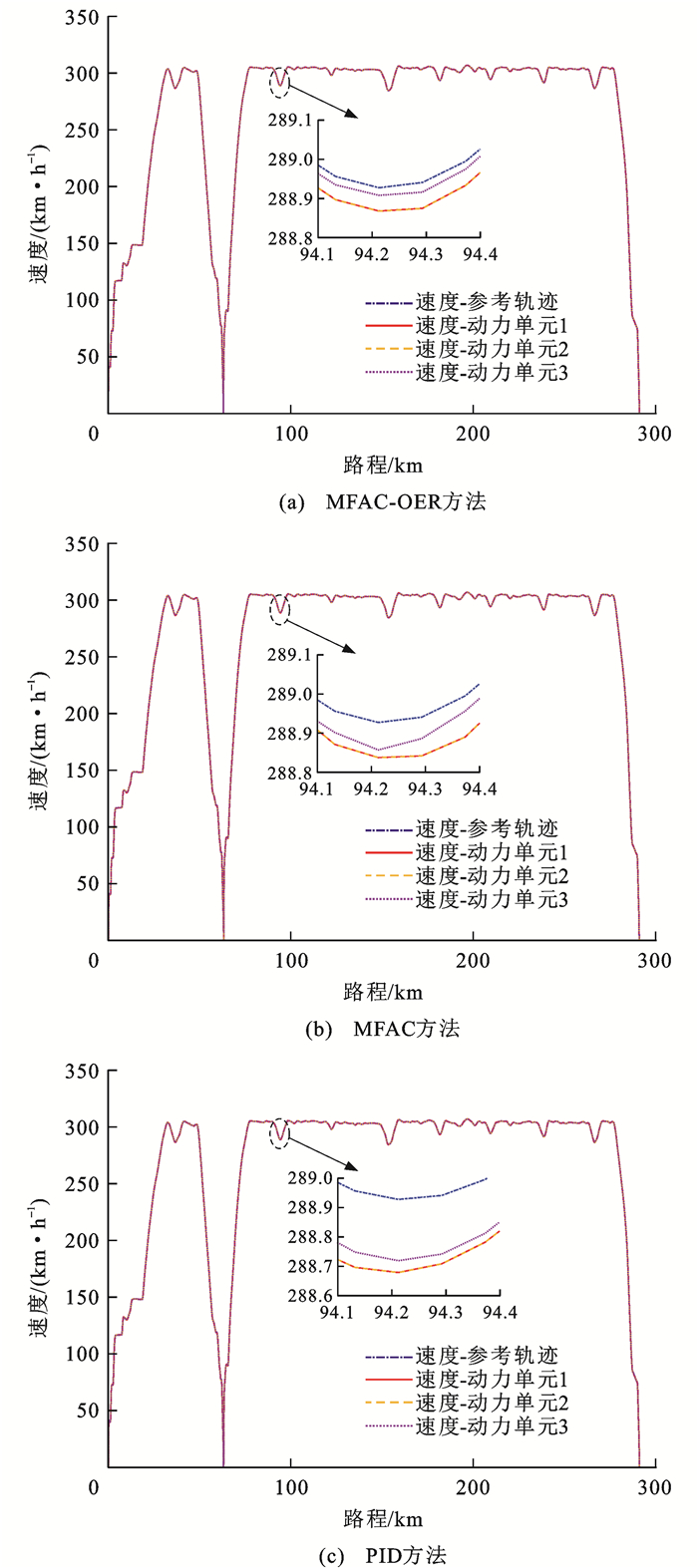
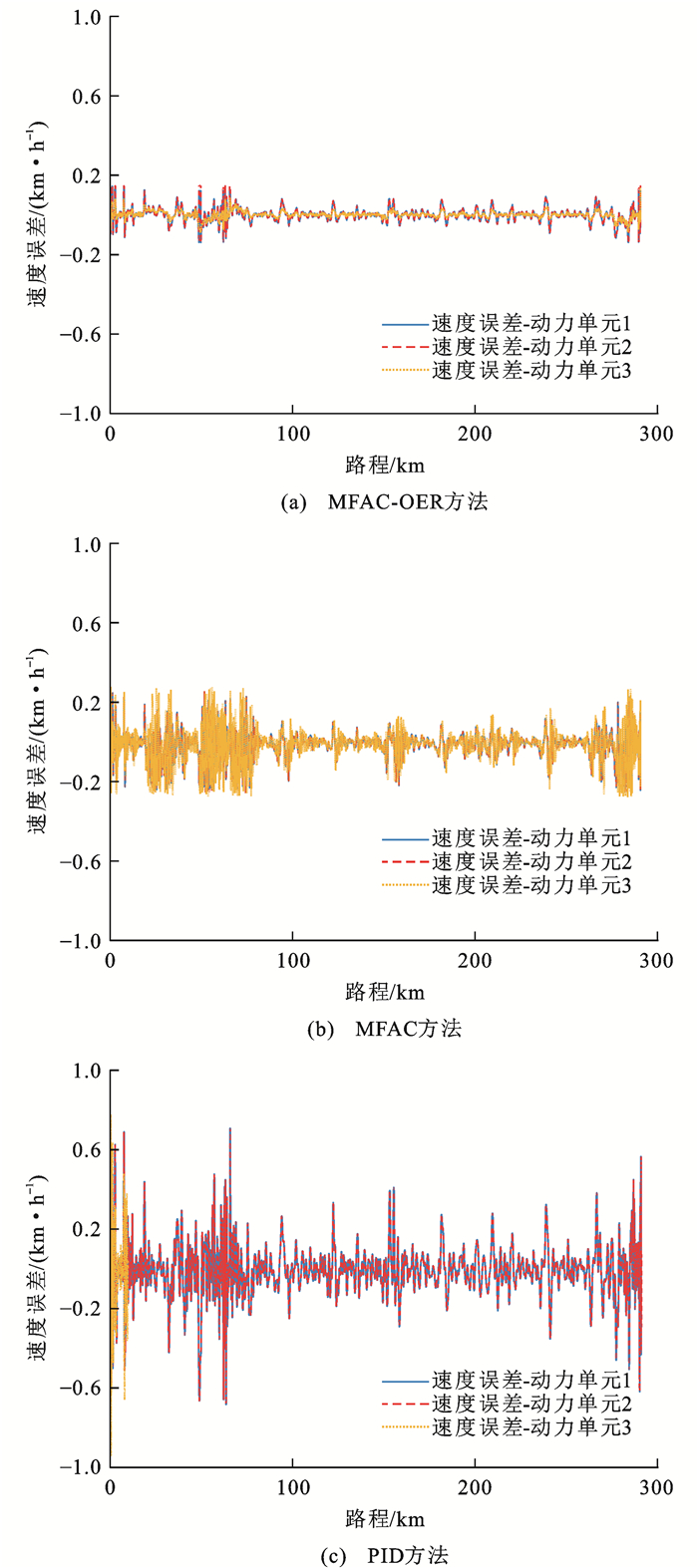
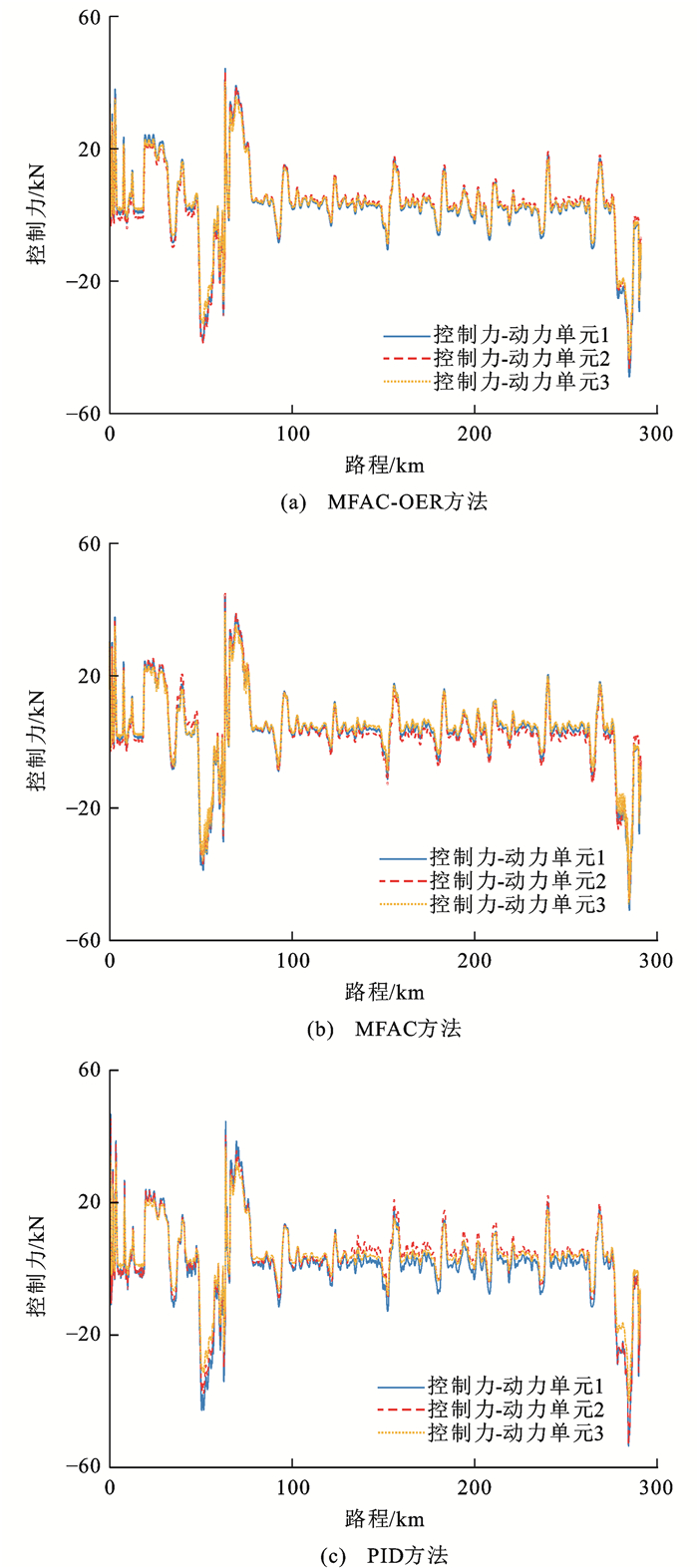
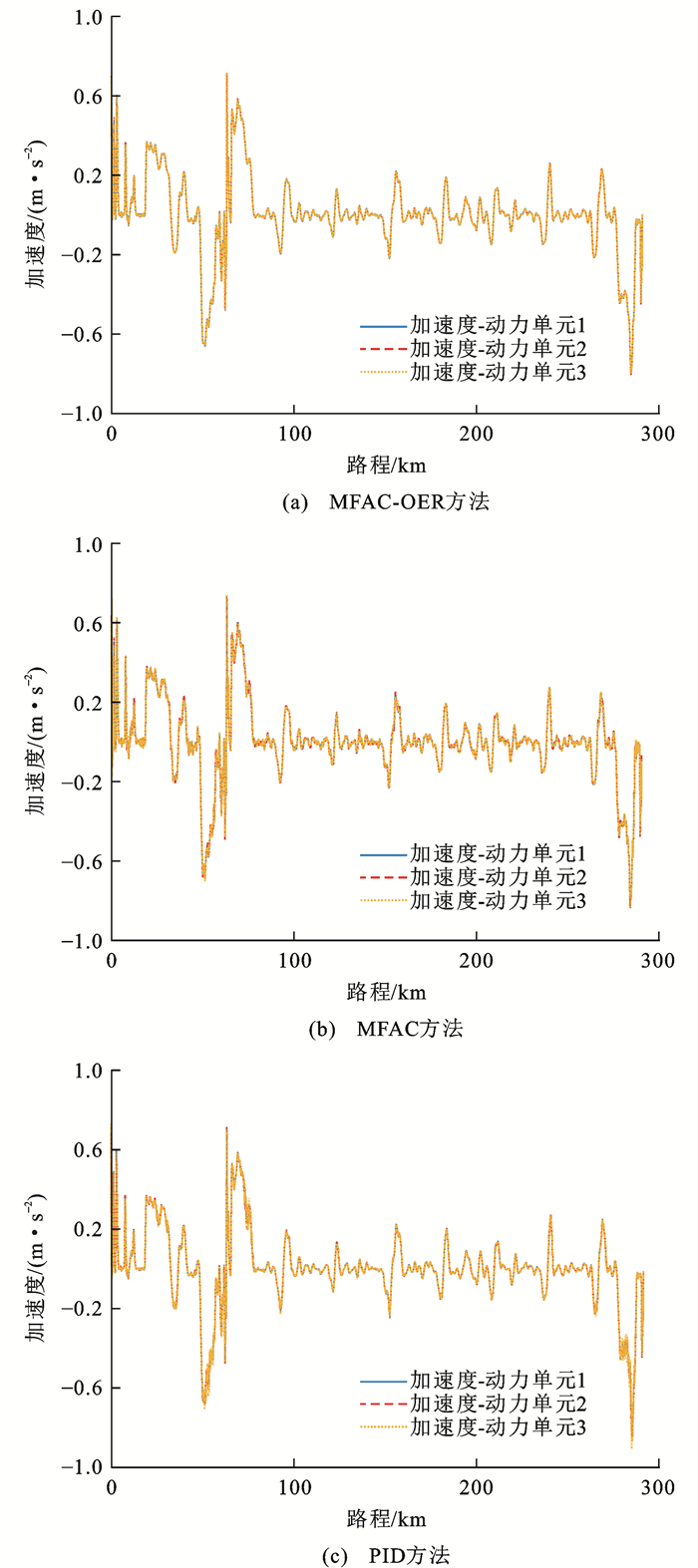
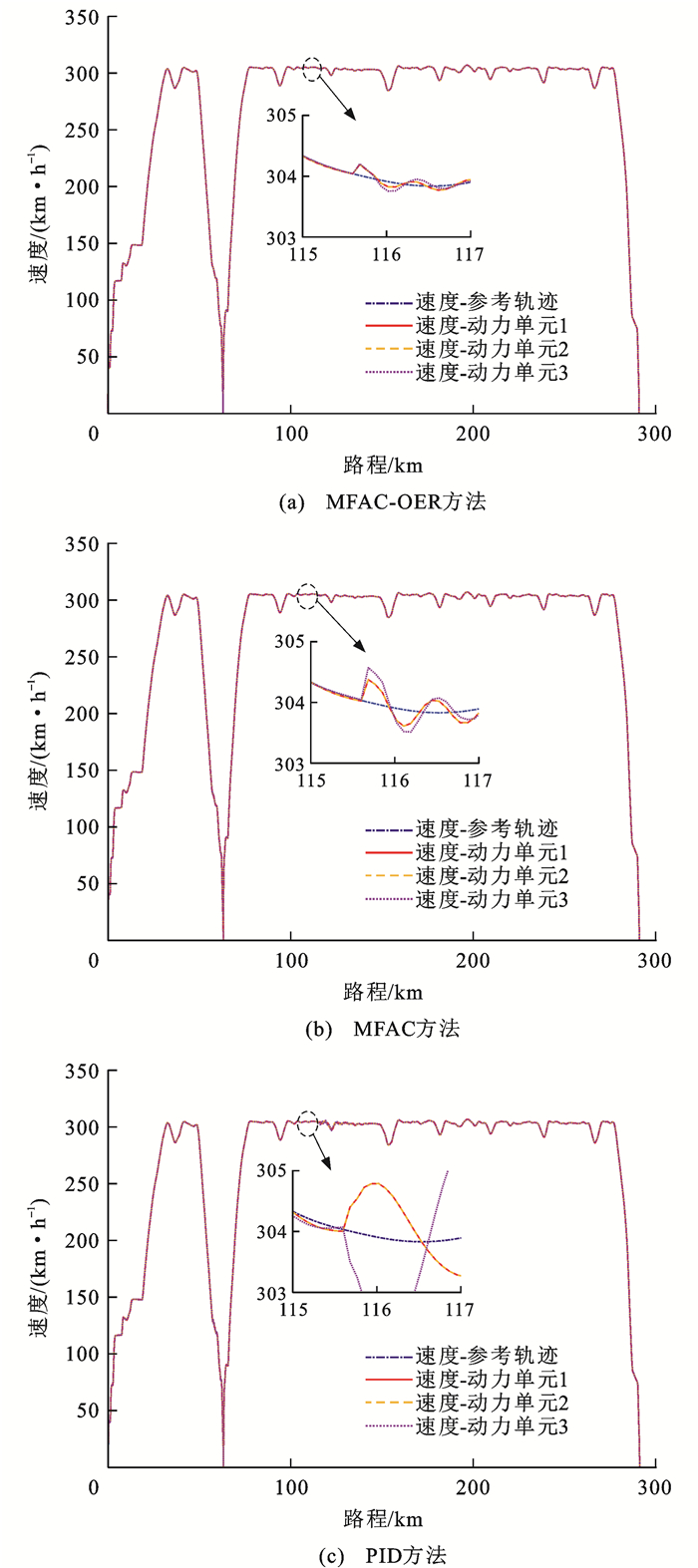
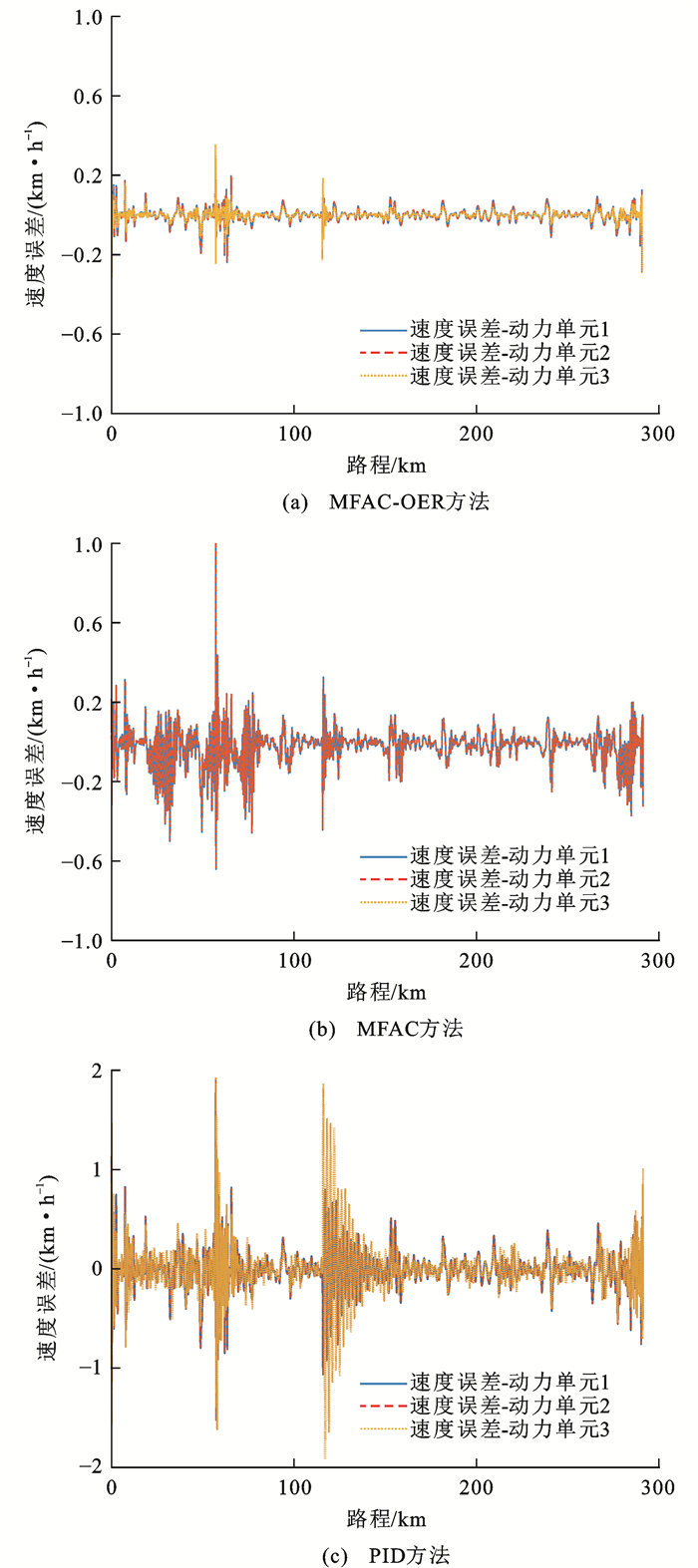
改进的动车组速度跟踪系统的无模型自适应控制
周靓
,
夏金凤
,
李中奇
摘要:
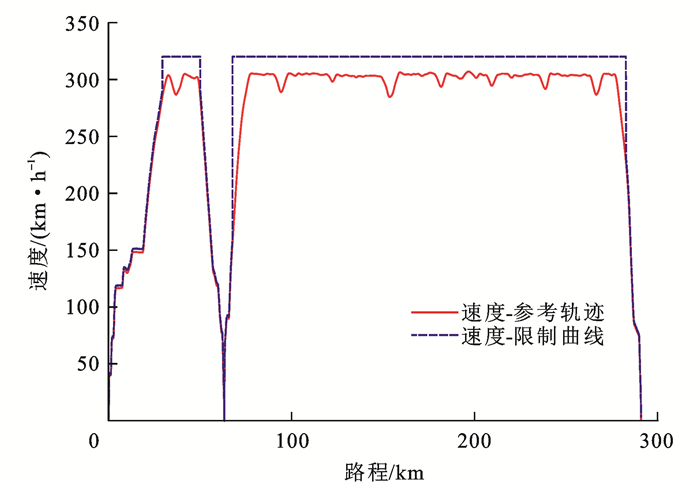
为了提高列控系统跟踪精度与平稳运行,提出了一种改进的多输入多输出(MIMO)无模型自适应控制(MFAC)方法;基于动态线性化技术,将系统各动力单元输入输出数据等效成更符合高速动车组实际运行特性的全格式动态线性化(FFDL)数据模型;通过在目标准则函数中加入输出误差率,并对输出误差和输出误差率进行加权融合,推导出新的带有输出误差率的无模型自适应控制(MFAC-OER)方案;通过对FFDL数据模型的外界扰动、参数误差等不确定项进行延时估计,进一步提升了算法的控制性能和对系统的等价描述程度;以实验室配备的CRH380A型动车组半实物试验平台对该方法进行仿真测试,使其跟踪济南—徐州的实际速度-位移曲线,并与传统算法进行对比。仿真结果表明:通过MFAC-OER方法得到的动车组各动力单元速度误差为[-0.151, 0.136] km·h
-1
,控制力和加速度分别在[-48, 42] kN和[-0.785, 0.687] m·s
-2
以内且变化平稳,控制性能优于比例积分微分方法和传统MFAC方法;整体仿真结果证明了MFAC-OER方法不仅能快速到达系统稳态并且具有良好的抗外界干扰特性,满足动车组跟踪精度与安全要求。
更多>
2024, 24(2): 267-280.
doi:
10.19818/j.cnki.1671-1637.2024.02.019
摘要
(
1495
)
HTML
(
245
)
PDF (12795KB)
(
139
)
引用
(
)
文章推荐
更多>
低空无人机物流公众接受度研究综述
智能飞行汽车:驱动未来城市空中交通
无人驾驶航空器自主探测与避让技术研究综述
铁道车辆齿轮箱动力学与故障诊断研究综述
FMEA/FMECA在船舶工程中的应用综述
关键词检索
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
期刊检索
2026年
2025年
2024年
2023年
2022年
2021年
2020年
2019年
2018年
2017年
2016年
2015年
2014年
2013年
2012年
2011年
2010年
2009年
2008年
2007年
2006年
2005年
2004年
2003年
2002年
2001年
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
期刊动态
更多>
翟婉明院士莅临《交通运输工程学报》轨道交通方向青年编委会会议,指导办刊工作
《交通运输工程学报》“大宗固废在交通运输工程中的资源化利用”专刊征稿
《交通运输工程学报》“航空运输业与航空制造业融合下的前沿技术、装备与系统”专刊征稿
《交通运输工程学报》“水路交通智能技术与装备”专刊征稿
学报动态
《交通运输工程学报》“多年冻土区交通基础设施韧性提升技术” 专刊征稿启事
作者园地
更多>
关于文章中的中国地图
中图分类号
友情链接
更多>
《工程索引》(Ei Compendex)
《斯高帕斯数据库》(Scopus)
交通运输工程学报(CNKI)
长安大学学术期刊管理中心
交通运输工程学报(英文)
中国公路学报
×
Close
导出文件
文件类别
RIS(可直接使用Endnote编辑器进行编辑)
Bib(可直接使用Latex编辑器进行编辑)
Txt
引用内容
引文——仅导出文章的Citation信息
引文和摘要——导出文章的Citation信息和文章摘要信息
×
Close
引用参考文献格式