首页
期刊简介
编委会
期刊在线
网络首发
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
出版伦理
AI使用声明
同行评审及出版流程
投稿模板
版权转让协议
期刊订阅
联系我们
编辑团队
联系方式
English
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
首页
期刊简介
编委会
期刊在线
网络首发
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
出版伦理
AI使用声明
同行评审及出版流程
投稿模板
版权转让协议
期刊订阅
联系我们
编辑团队
联系方式
English
留言板
尊敬的读者、作者、审稿人, 关于本刊的投稿、审稿、编辑和出版的任何问题, 您可以本页添加留言。我们将尽快给您答复。谢谢您的支持!
姓名
邮箱
手机号码
标题
留言内容
验证码
用户中心
作者投稿
作者查询
专家审稿
编辑办公
期刊信息
(2001年创刊 月刊 )
主 管:
中华人民共和国教育部
主 办:
长安大学
编辑出版:
《交通运输工程学报》编辑部
主 编:
沙爱民
地 址:
陕西省 西安市 南二环 路中段 长安大学《交通运输工程学报》编辑部
邮 编:
710064
电 话:
029-82334388
邮 箱:
jygc@chd.edu.cn
国内发行:
中国邮政集团有限公司陕西省报刊发行局
国外发行:
中国国际图书贸易集团有限公司
标准刊号:
ISSN
1671-1637
CN
61-1369/U
CODEN
JYGXAS
学报微信视频号
学报微信公众号
重要源期刊收录
更多>
《交通运输工程学报》收录信息
《铁路运输领域高质量科技期刊分级目录》T1级
《公路运输领域高质量科技期刊分级目录》T1级
美国《工程索引》(Ei Compendex)
《文摘和引文数据库》(Scopus)
日本科学技术振兴机构(JST)中国文献数据库
邮件订阅
RSS
2014年 第14卷 第3期
栏目
道路与铁道工程
载运工具运用工程
交通运输规划与管理
交通信息工程及控制
上一期
|
下一期
选择全部
显示方式:
道路与铁道工程
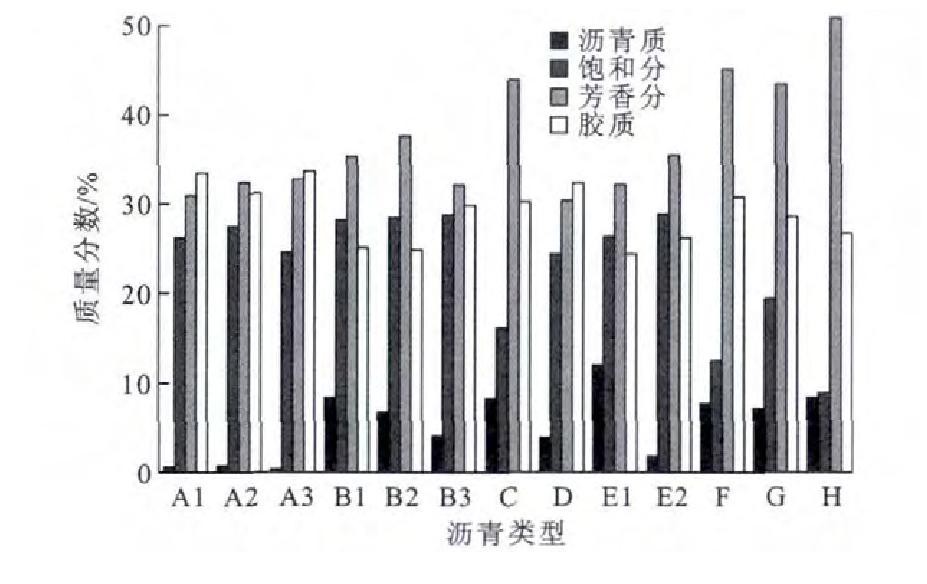
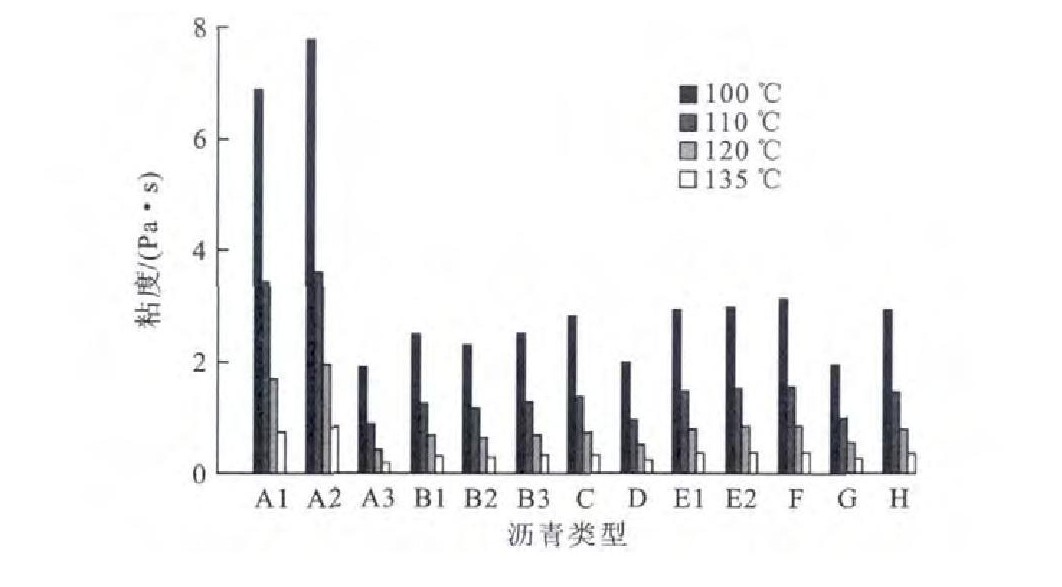
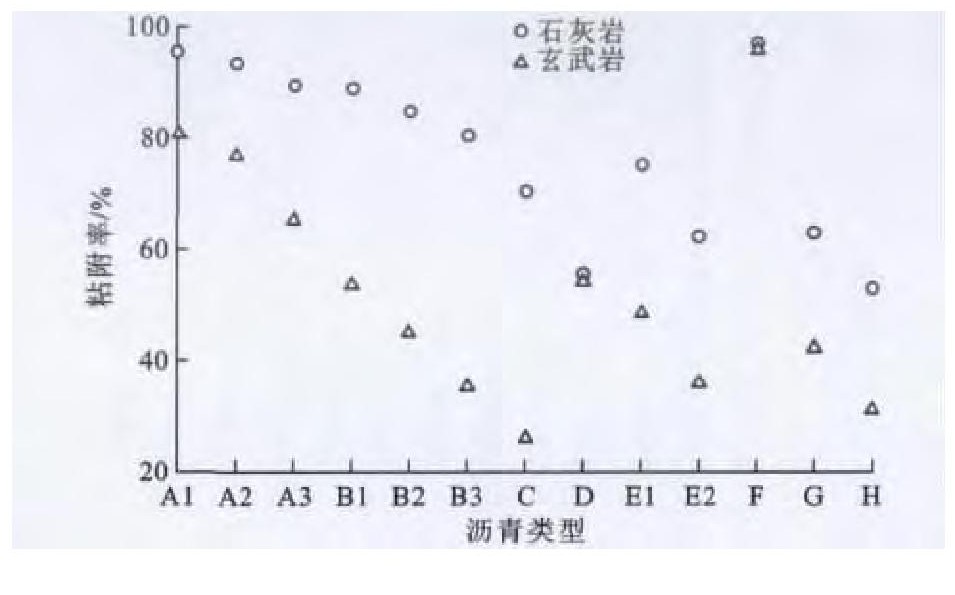
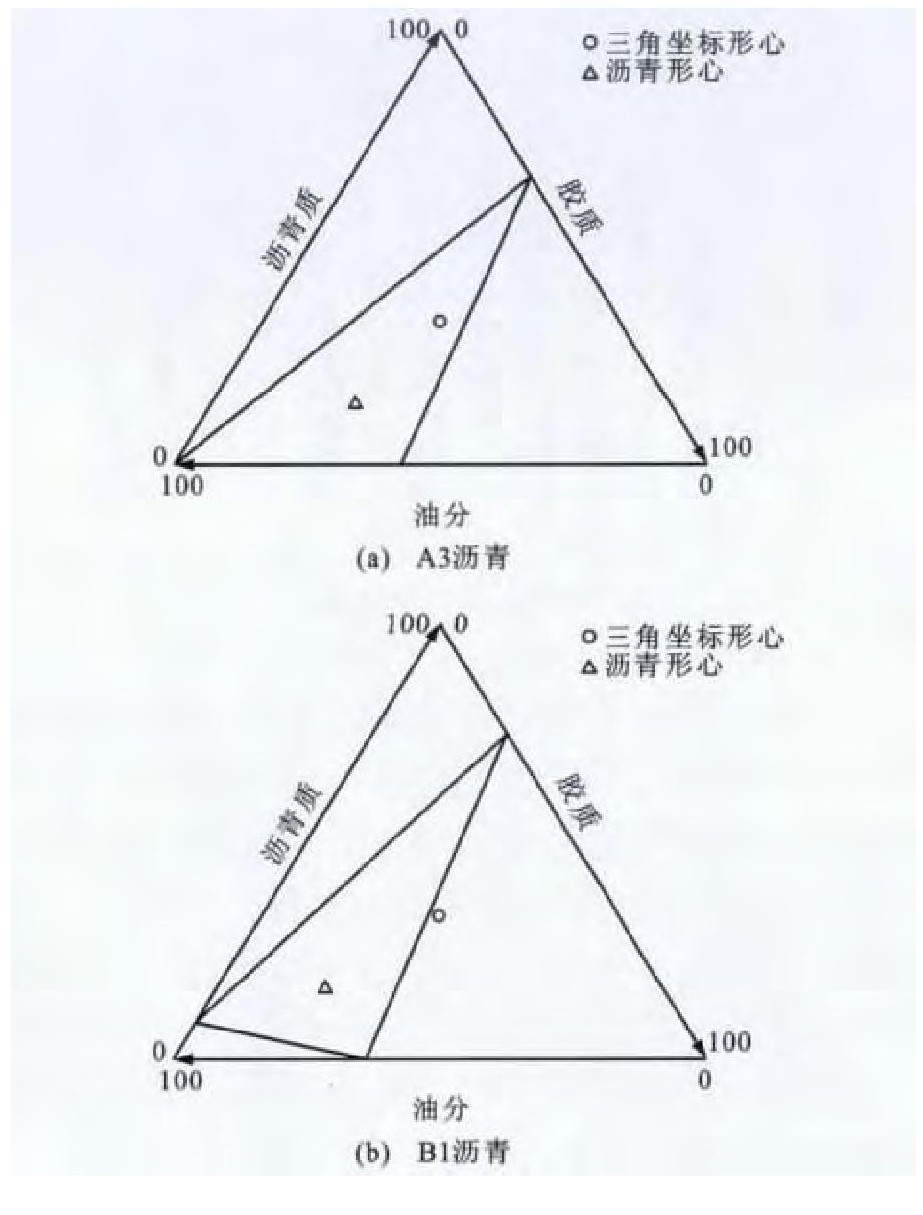
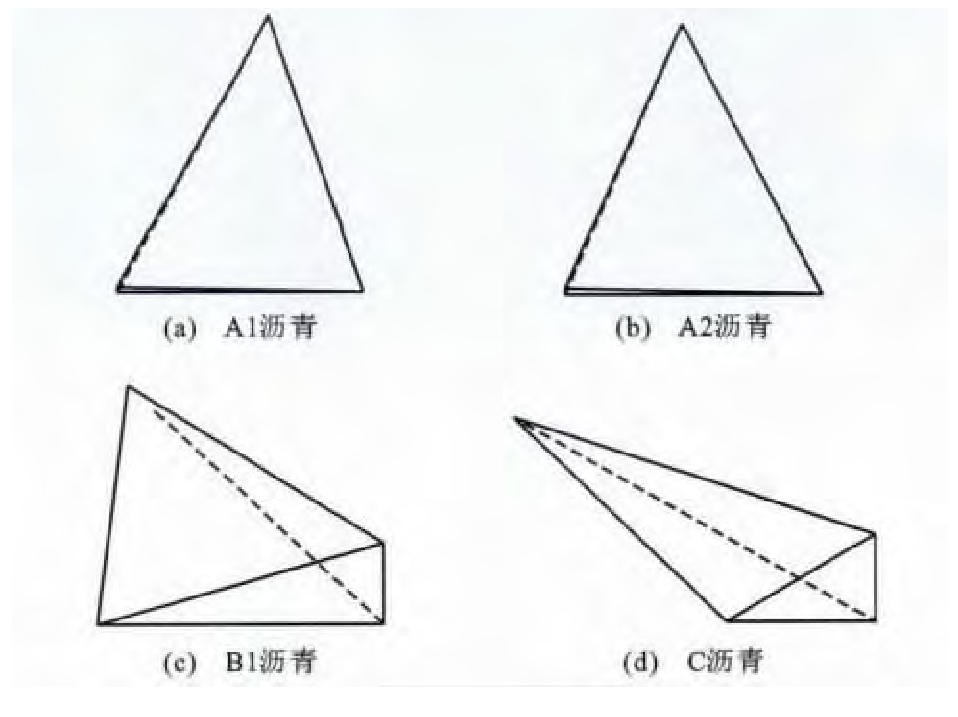
三角形坐标系下沥青组分与粘度、粘附性关系
傅珍
,
延西利
,
蔡婷
,
马峰
,
汪林兵
摘要:
为研究沥青的组分和组分构成关系对沥青技术性质的影响, 选用13种道路石油沥青和2种集料, 采用四组分、表观粘度与粘附性试验研究了沥青组分与粘度、粘附性之间的关系。提出了三角形坐标系下的沥青四组分试验结果表征方法, 采用沥青四组分数据绘制沥青特征三角形, 利用惯性矩反映沥青的组分构成特征, 分析了沥青四组分数据构成的三棱锥几何特性与粘度、粘附性的联系。试验结果表明: 除沥青的组成成分之外, 沥青组成成分的结构差异也会影响其粘度及集料粘附性; 对于不同品牌而相同标号的沥青, 在三角形坐标系下, 沥青组分特征三角形的惯性矩越大, 与集料粘附性越好。
更多>
2014, 14(3): 1-7.
摘要
(
2452
)
HTML
(
864
)
PDF (432KB)
(
13967
)
引用
(
)
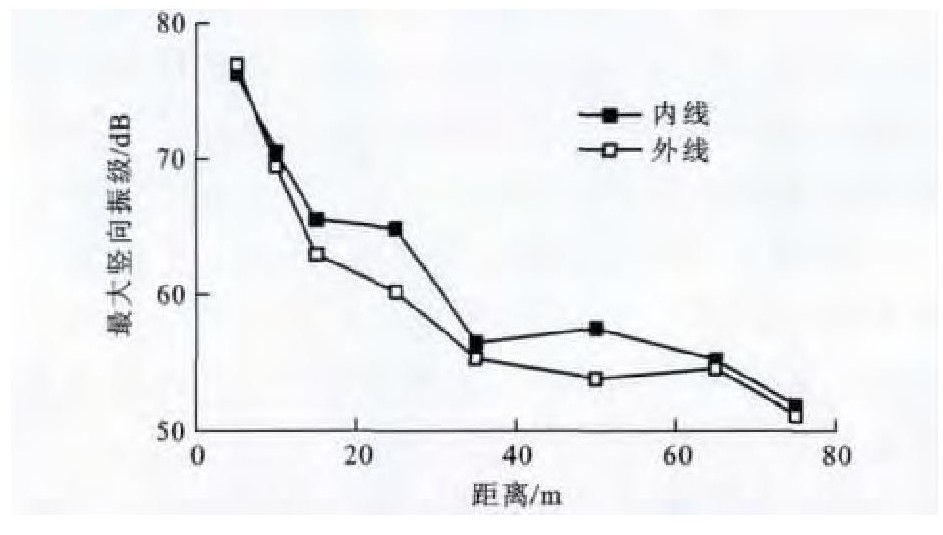
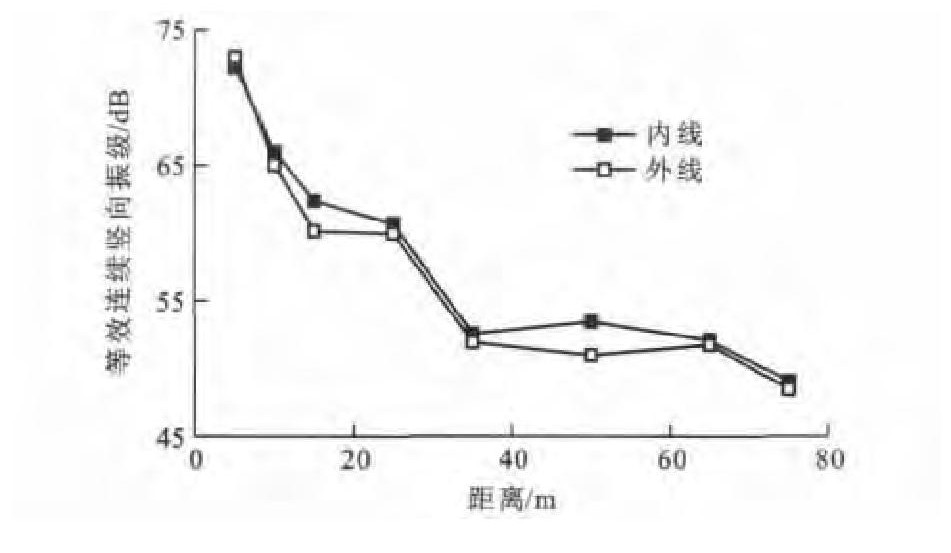
快速铁路路堤段地面振动特性
张光明
,
贺玉龙
,
杨立中
,
苏凯
摘要:
现场测试了列车通过成灌快速铁路路堤段时的地面振动, 分析了列车从内侧和外侧轨道通过时引起地面不同距离处的最大振级、等效振级和振动频率, 研究了振动频率与衰减速度的相关性, 建立了基于波尼茨模型的铁路路堤段地面振动的分频段预测方法, 并对预测方法进行了实例验证。分析结果表明: 距路堤5~75m范围内地面最大竖向振级为51~77dB, 满足现行铁路环境振动标准要求; 快速铁路路堤段列车从内侧轨道通过时的地面振动大于外侧轨道的地面振动; 地面振动在距路堤35m范围以内衰减较快, 距离大于35m后振动衰减速度变慢; 在近路堤范围内以高频振动为主, 5m处振动能量主要集中在16~100Hz内, 超过65m后振动以小于4Hz的低频振动为主; 振动反弹现象主要发生在小于20Hz和大于100Hz的频率范围内。预测方法取得了较好的预测精度。
更多>
2014, 14(3): 8-14.
摘要
(
1204
)
HTML
(
484
)
PDF (449KB)
(
763
)
引用
(
)
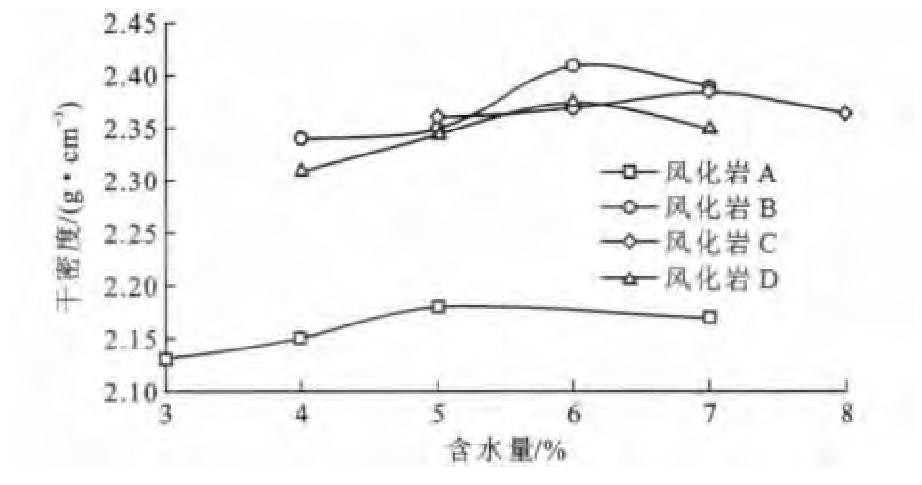
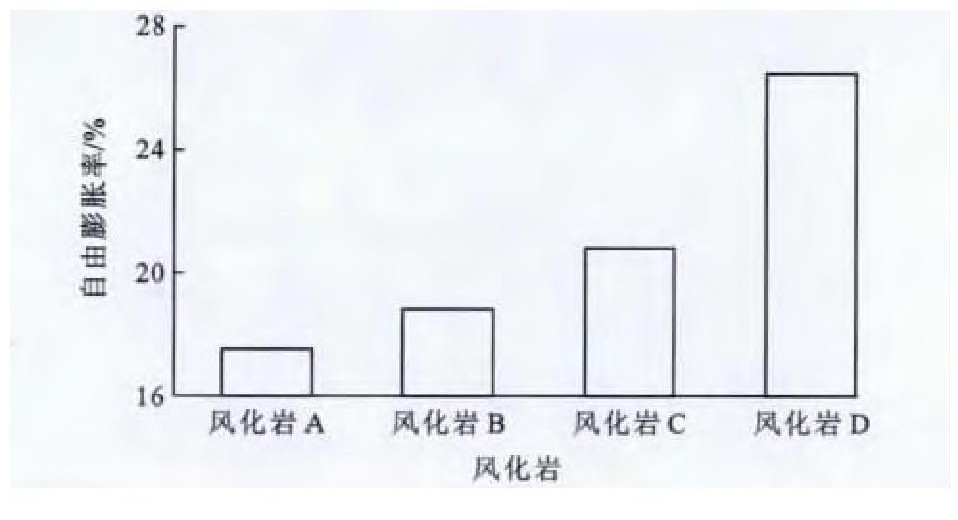
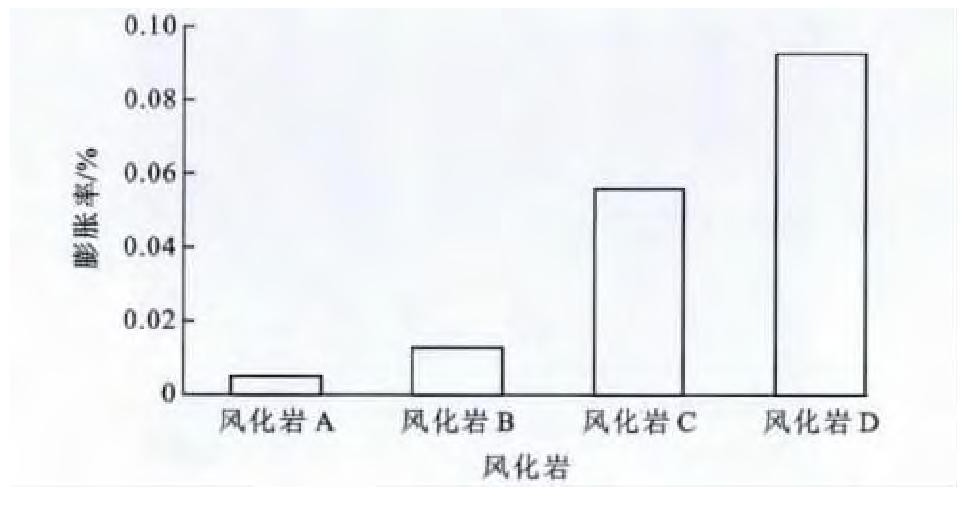
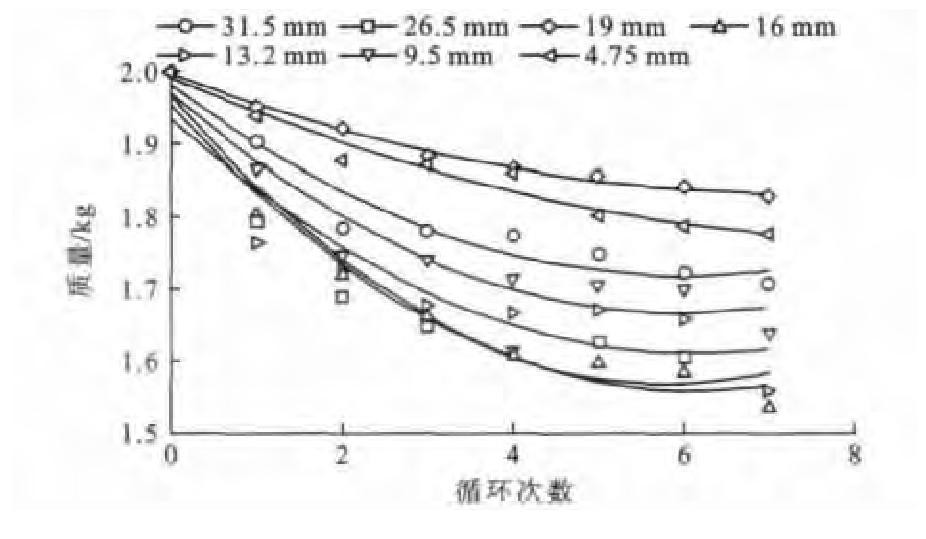
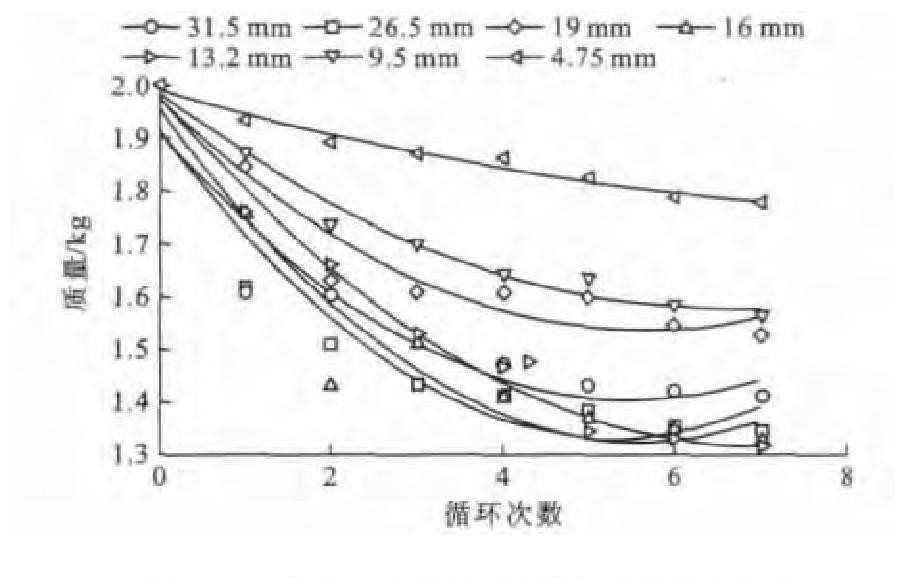
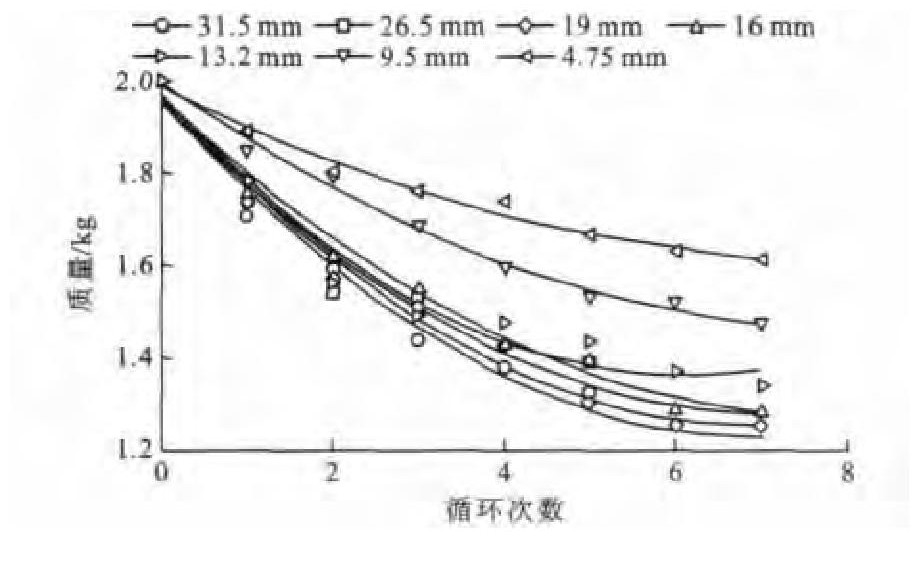
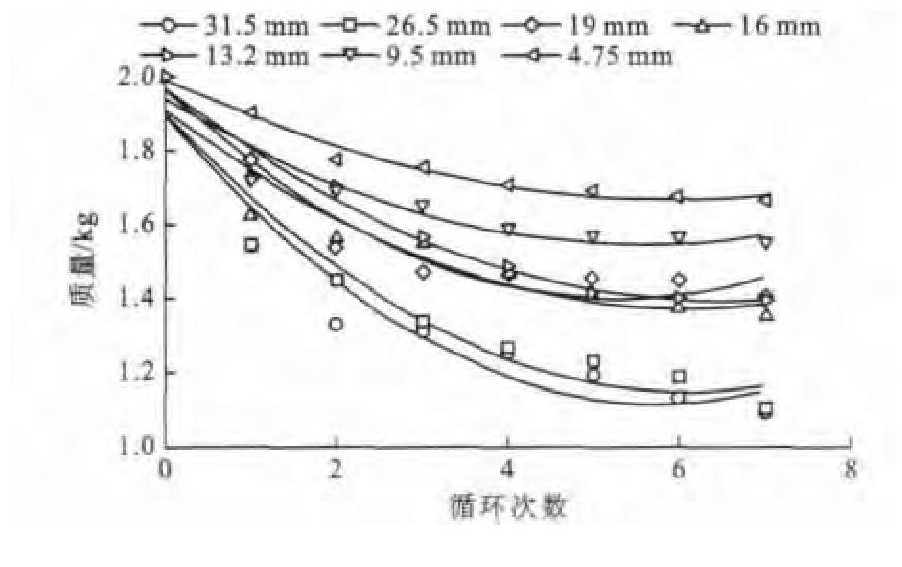
风化岩路基填料路用性能试验与风化程度评价
郭寅川
,
申爱琴
,
高韬
,
李炜光
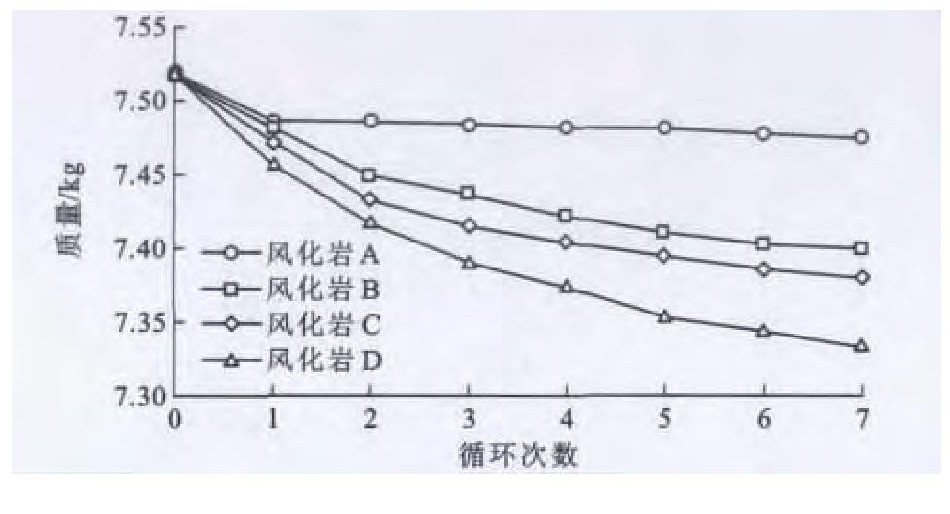
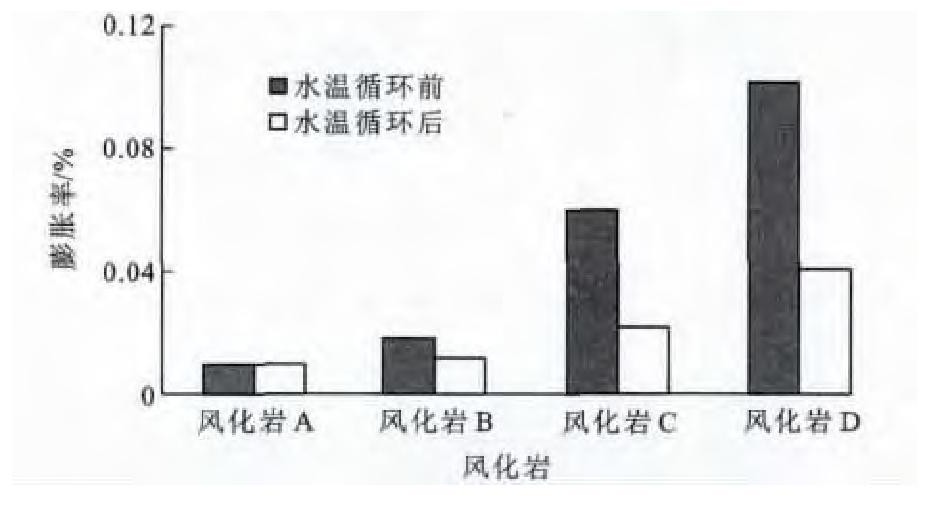
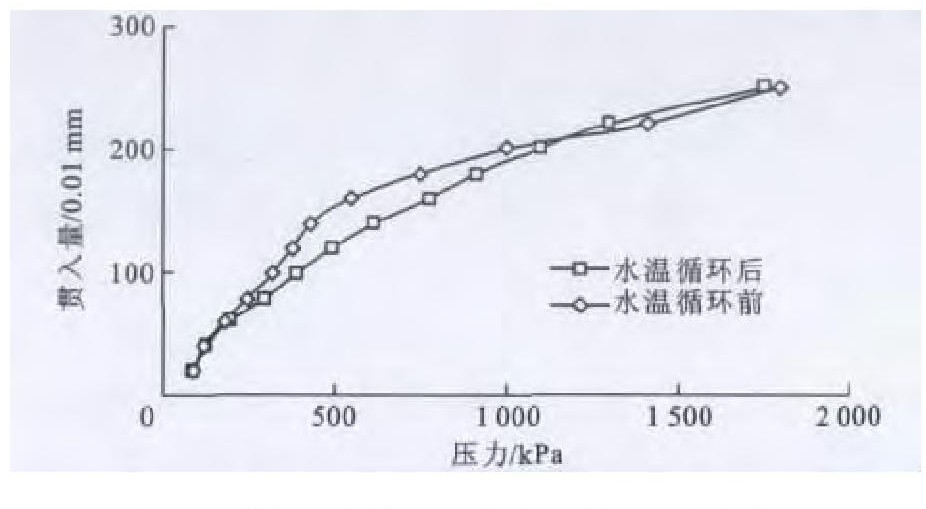
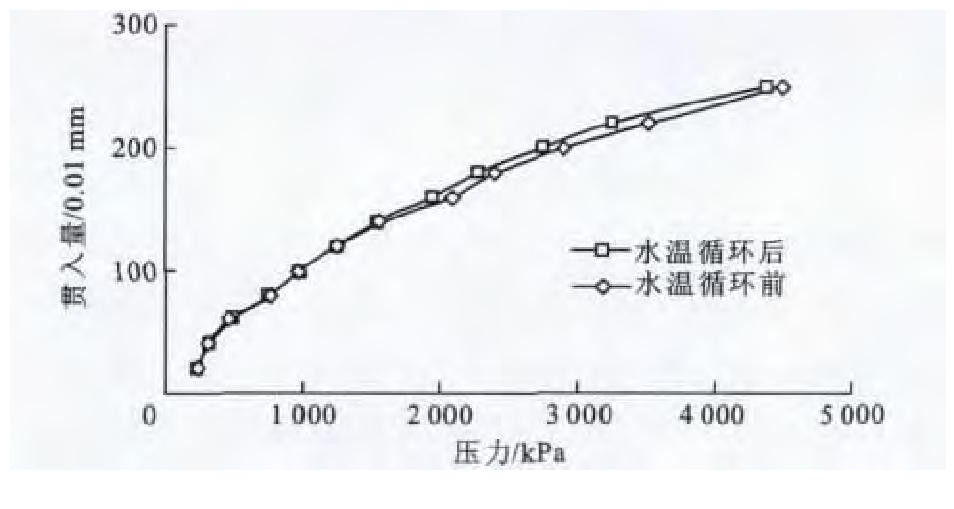
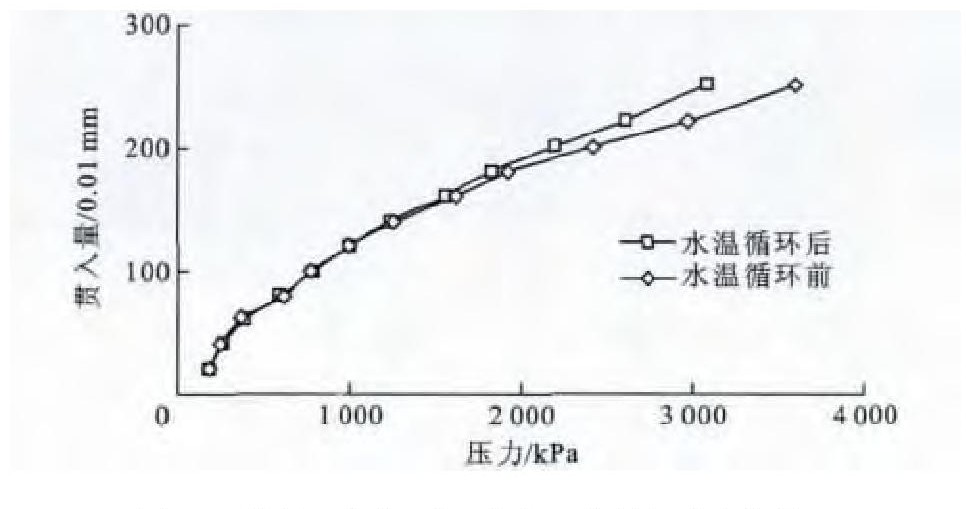
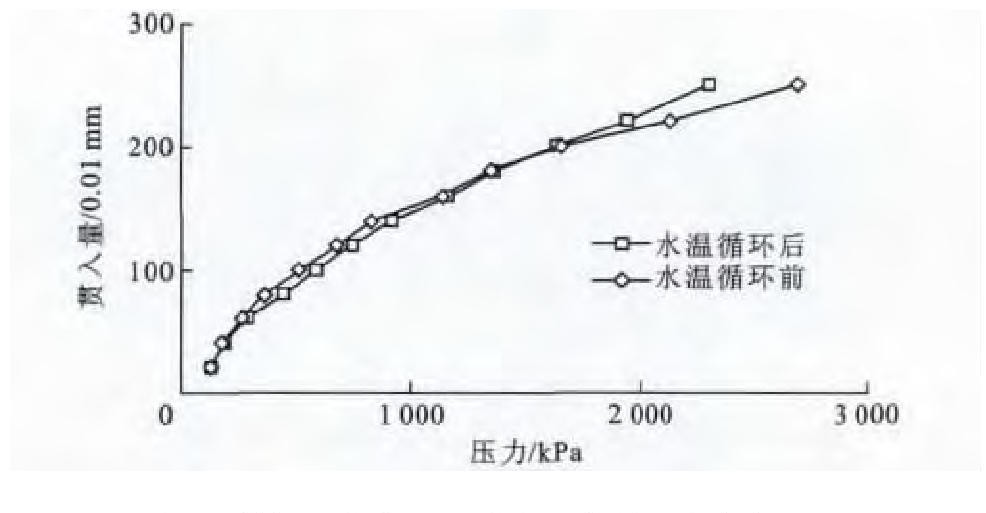
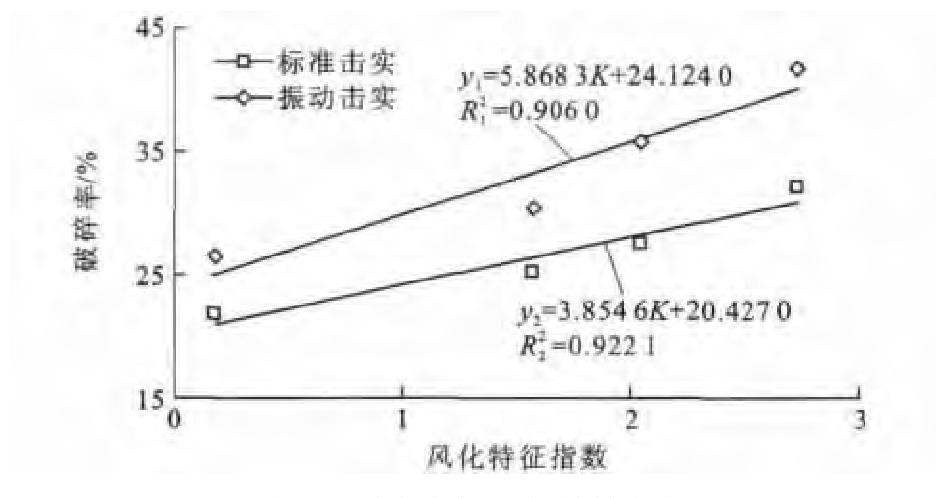
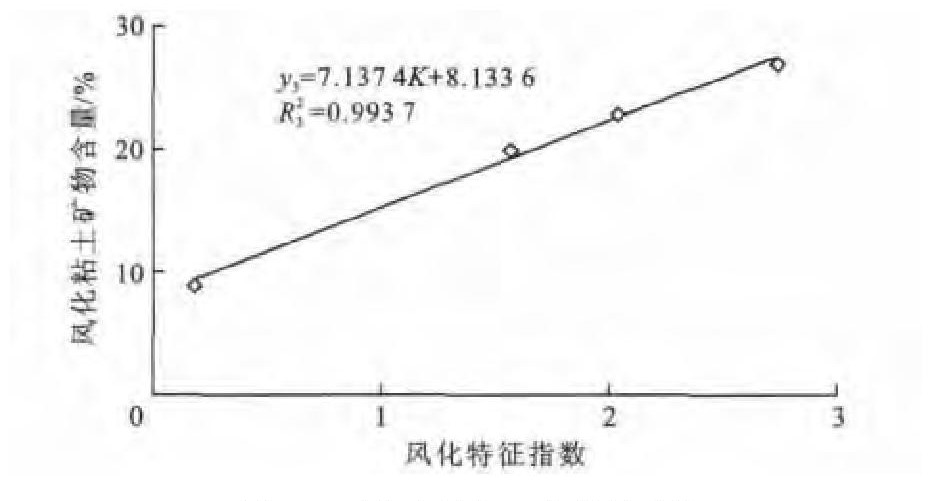
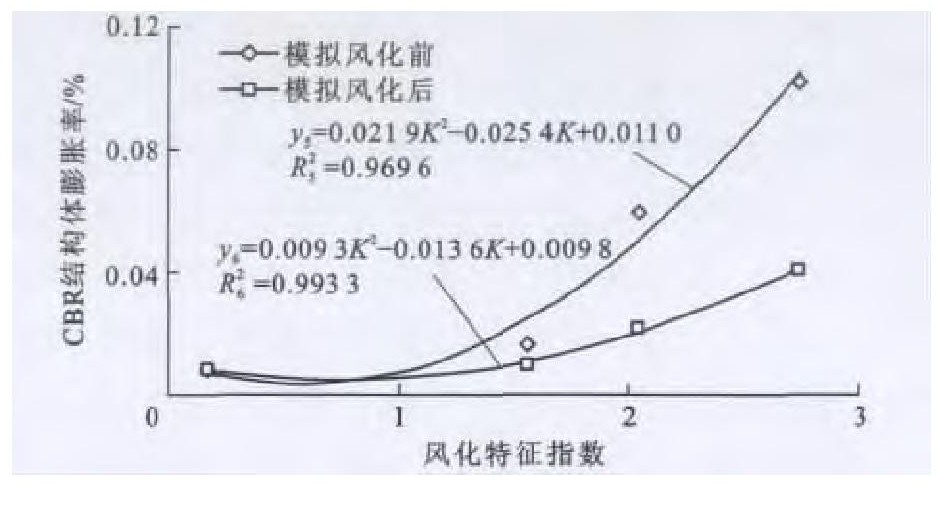
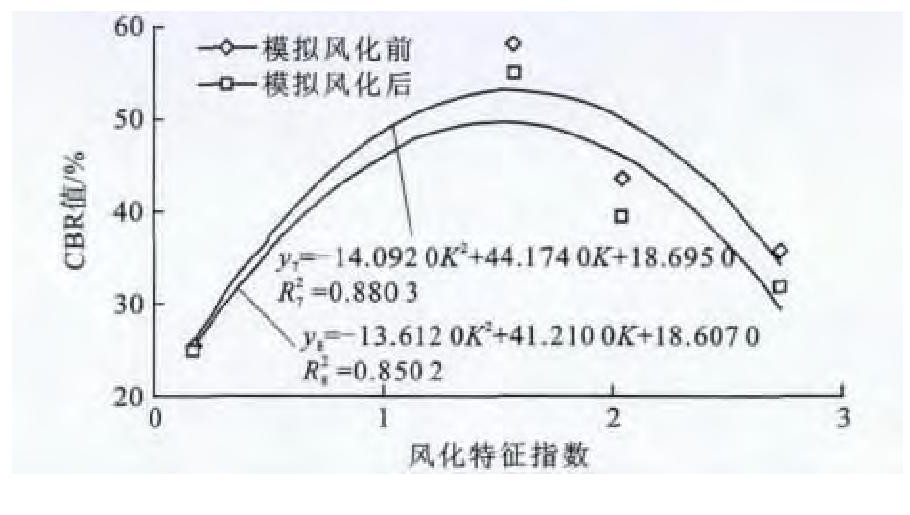
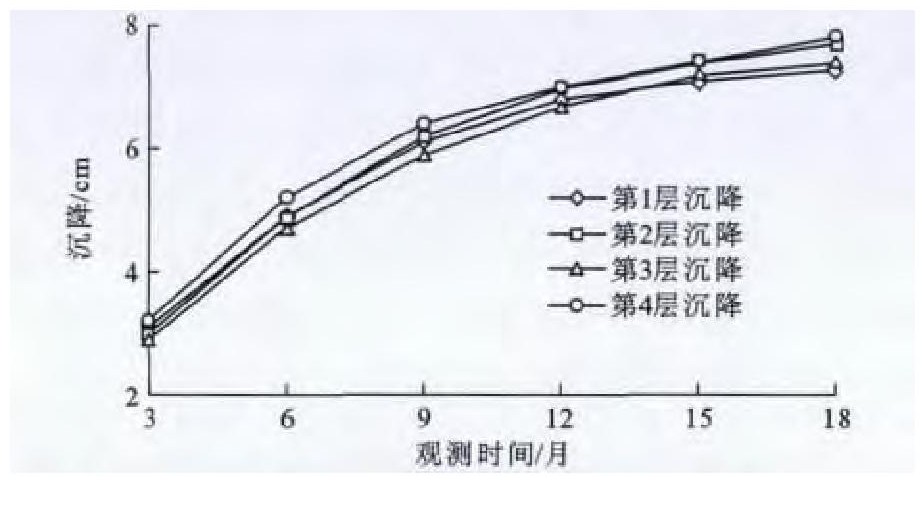
摘要:
选取了4种代表性风化岩, 分析了其级配组成、击实参数与破碎特性, 研究了风化岩路基长期稳定性的影响因素。开发了能够模拟路基填料自然风化的水温循环试验方法, 研究了风化程度对风化岩填料加州承载比和水温敏感性的影响与水温循环效应对风化岩性质的影响。采用物理风化与化学风化相结合的评价方法, 提出以风化特征指数作为风化程度的评价指标, 分析了风化特征指数与各项路用性能的相关性, 并建立了基于各项路用性能的风化程度分级标准。分析结果表明: 随着风化程度的加大, 风化岩力学性能与水温敏感性降低; 应用水温循环模拟试验能够判别风化岩的长期路用性能; 风化特征指数与风化岩路用性能决定系数大于0.85, 相关性良好, 可用来判定风化岩的风化程度与路用性能; 选用风化特征指数为0.78的风化岩铺筑试验路, 经18个月观测的路基最大沉降为7.8cm, 路用性能良好。
更多>
2014, 14(3): 15-23.
摘要
(
1261
)
HTML
(
449
)
PDF (637KB)
(
809
)
引用
(
)
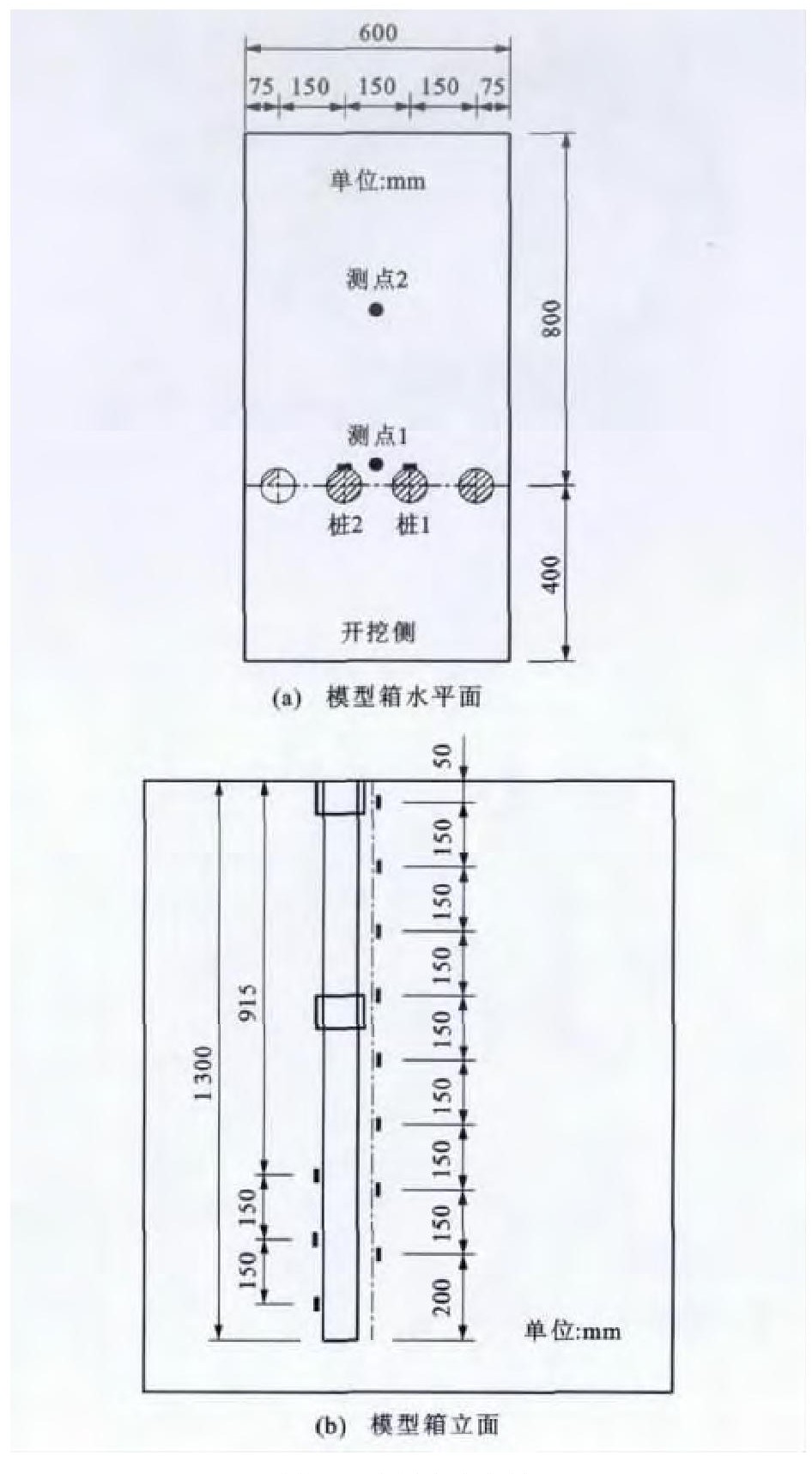
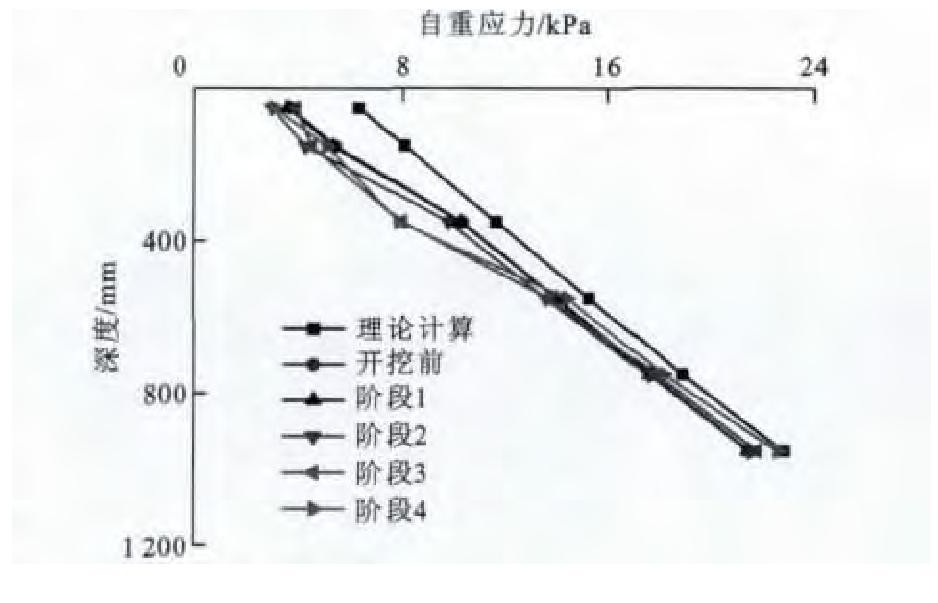
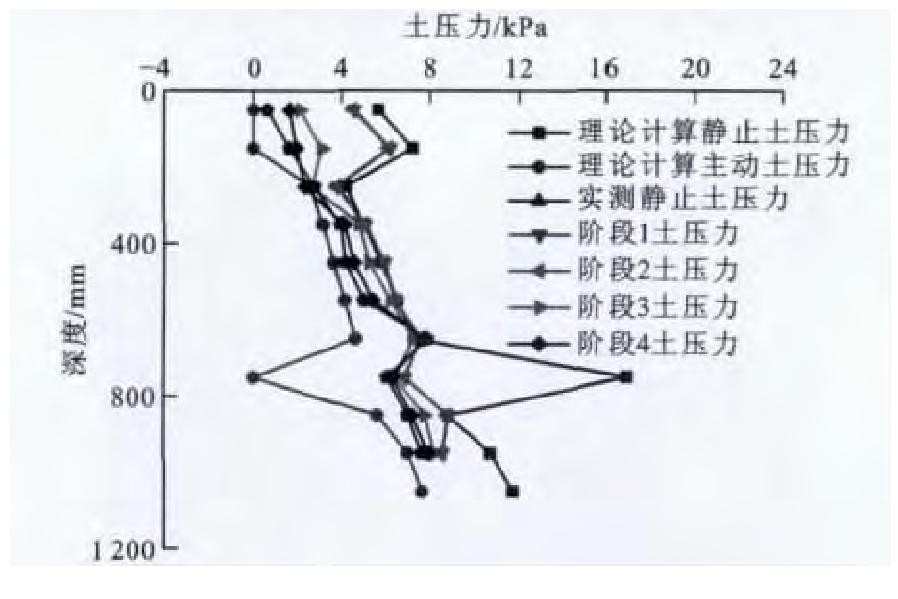
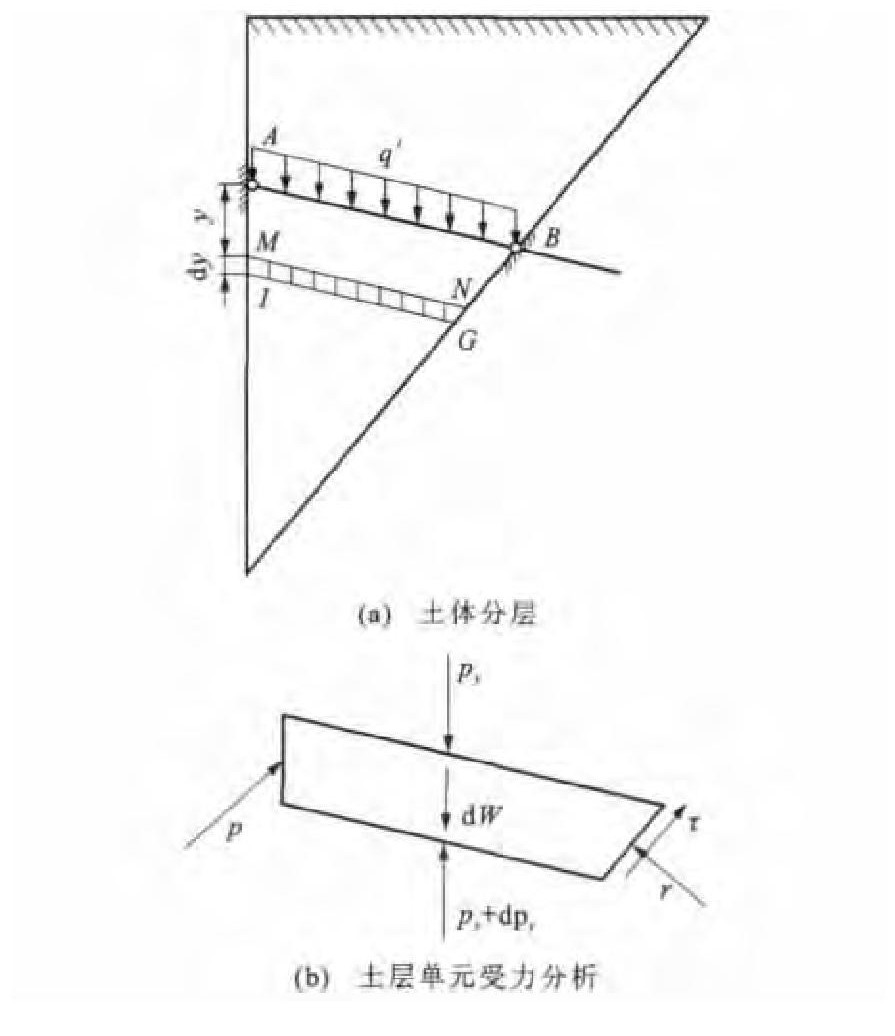
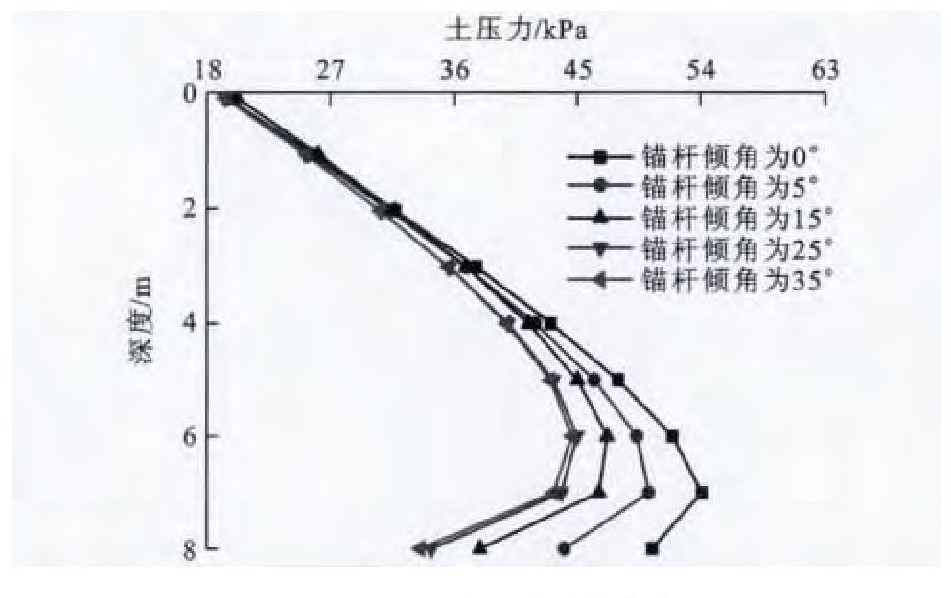
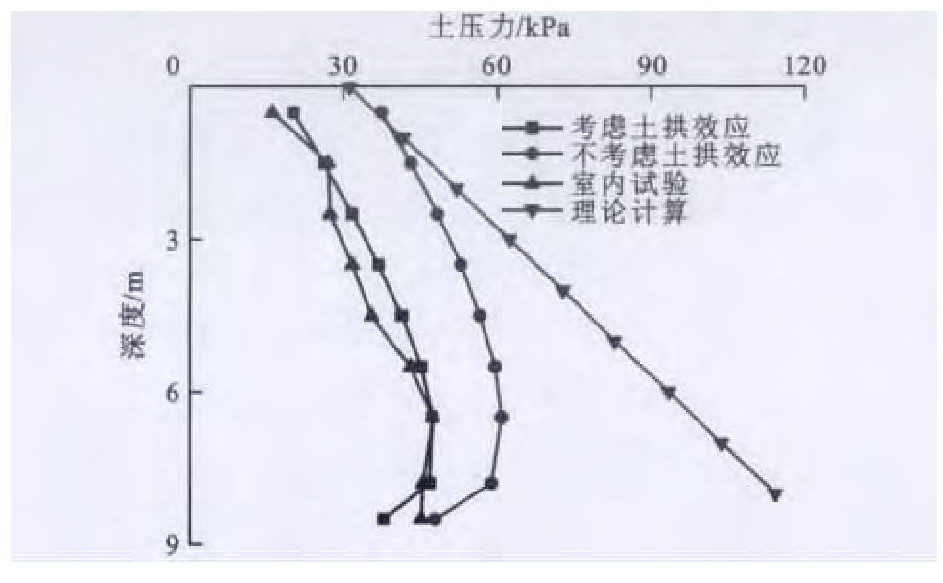
桩锚支护体系竖向土拱效应分析与桩后土压力计算
武崇福
,
李玉
,
张志军
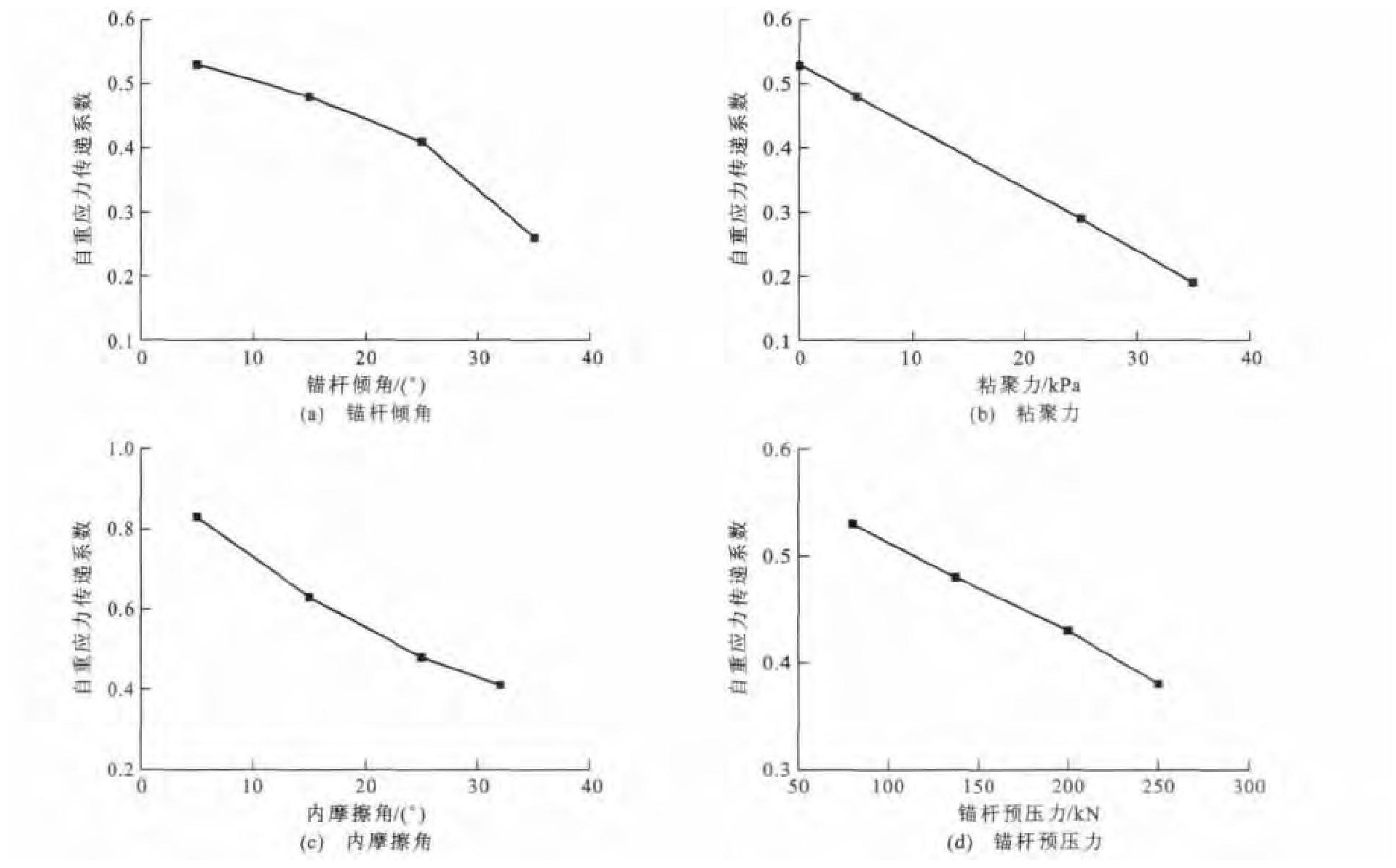
摘要:
针对桩锚支护桩后竖向土拱效应, 利用土拱力学平衡条件分析了土拱的形成机理、几何特性与其对土体应力分布的影响。采用室内模型试验, 监测得到不同阶段下土体的应力场分布, 通过与现场监测数据和经典理论计算值的比较, 验证竖向土拱的存在。基于竖向土拱效应, 采用斜土层单元法, 推导了桩后土体应力分布表达式, 并与经典理论计算值和模型试验数据进行了对比分析。研究结果表明: 土体自重应力曲线在2层锚杆间发生衰减, 桩侧土压力在锚杆支点处出现相对峰值, 锚杆上部形成了竖向土拱, 对土体应力重分布影响显著。采用考虑竖向土拱效应的斜土层单元法得到的土压力分布规律与室内试验结果一致, 2条曲线同深度处桩侧土压力最大差值不超过15%, 表明利用该方法计算出的土压力具有较高的准确性。
更多>
2014, 14(3): 24-33.
摘要
(
1552
)
HTML
(
558
)
PDF (692KB)
(
708
)
引用
(
)
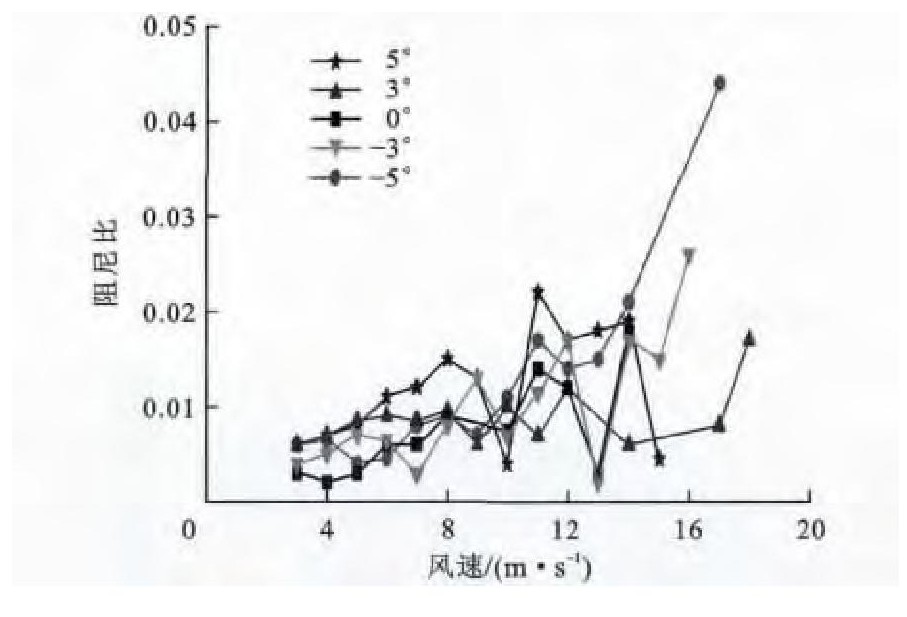
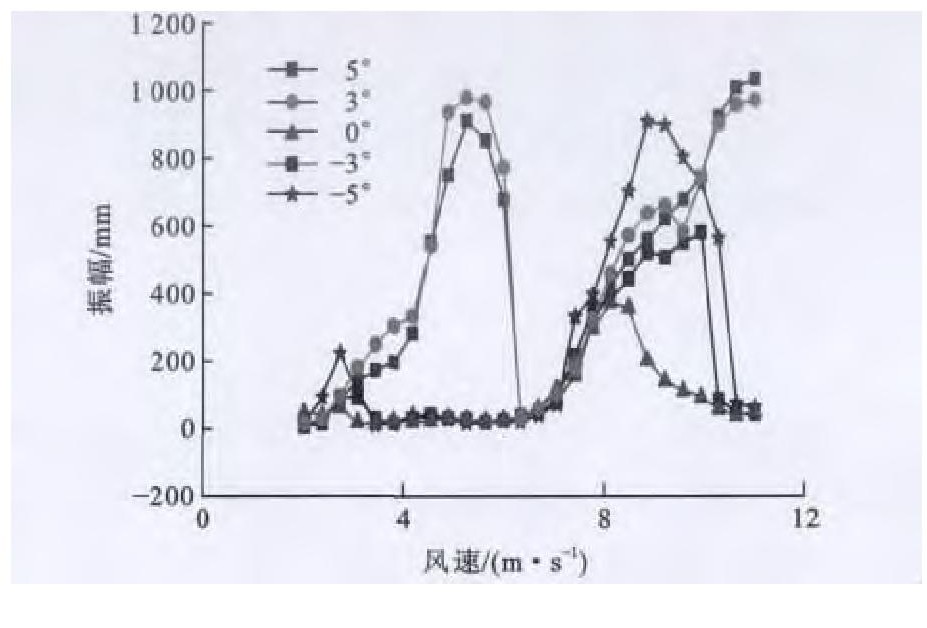
桥梁风致振动的混沌特性
李加武
,
王新
,
张悦
,
高蒙
,
陈子涛
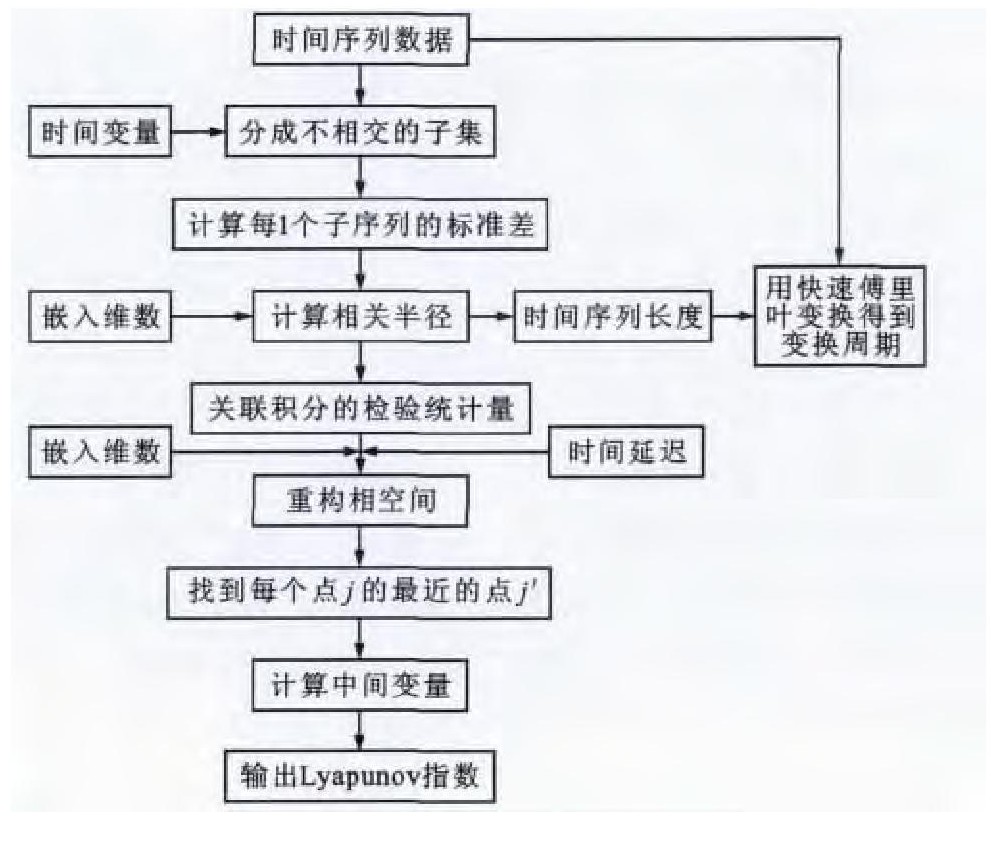
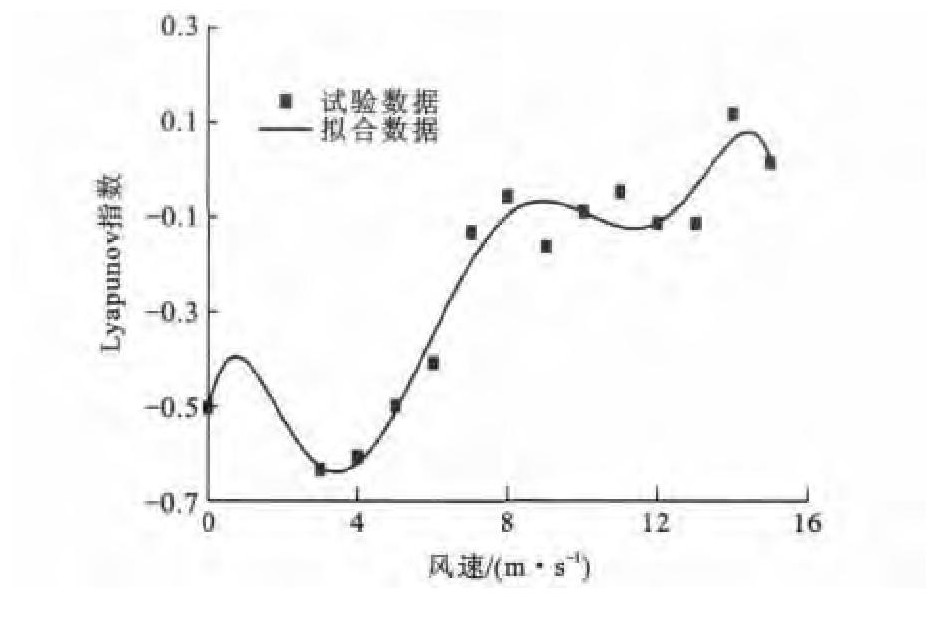
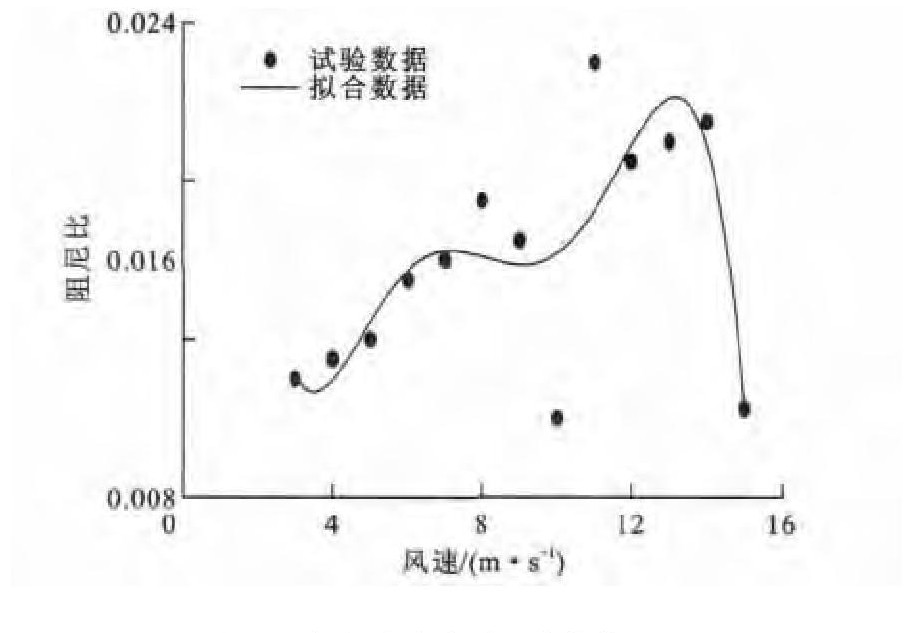
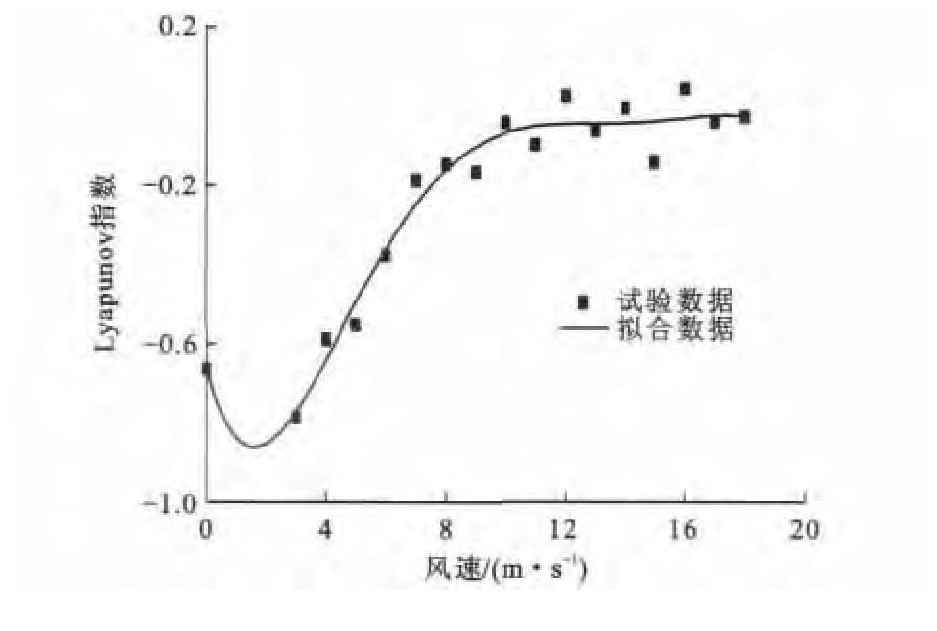
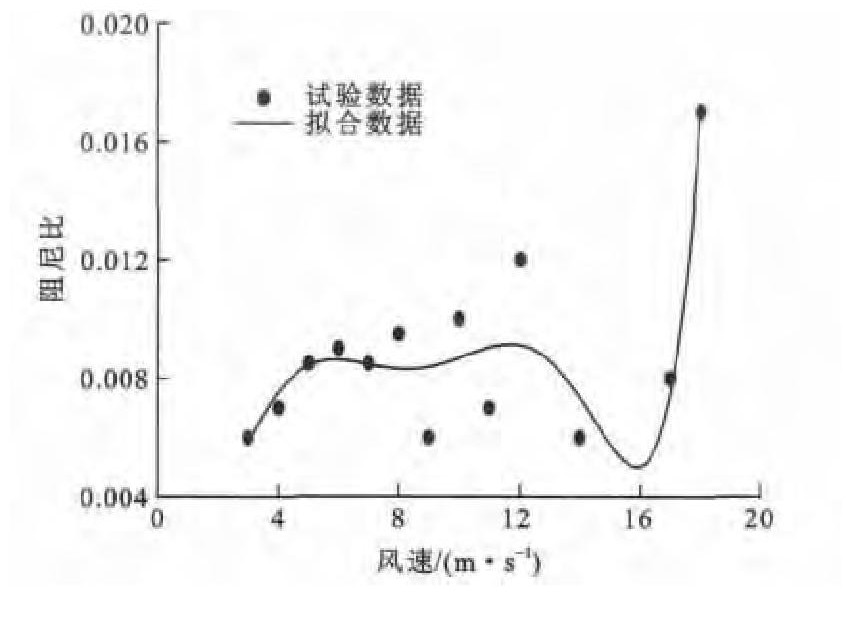
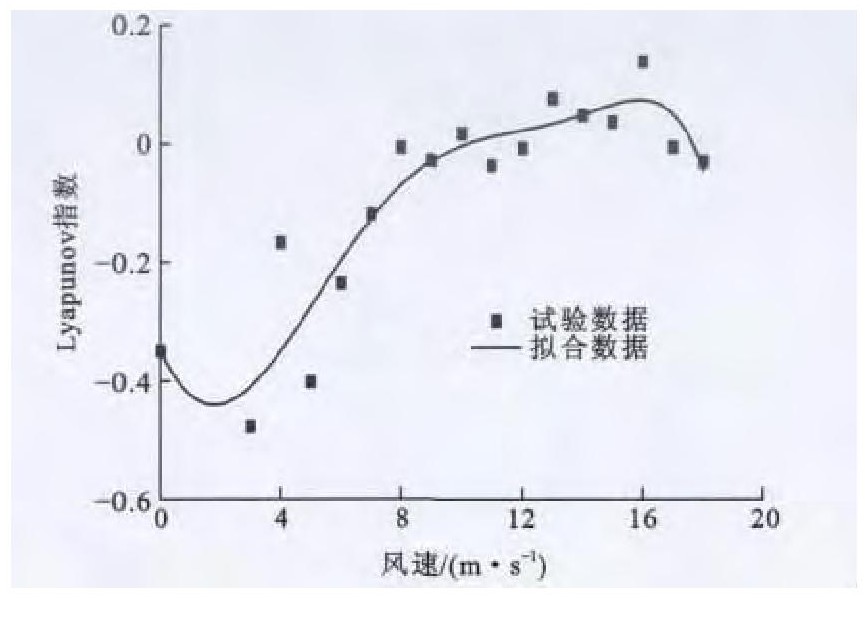
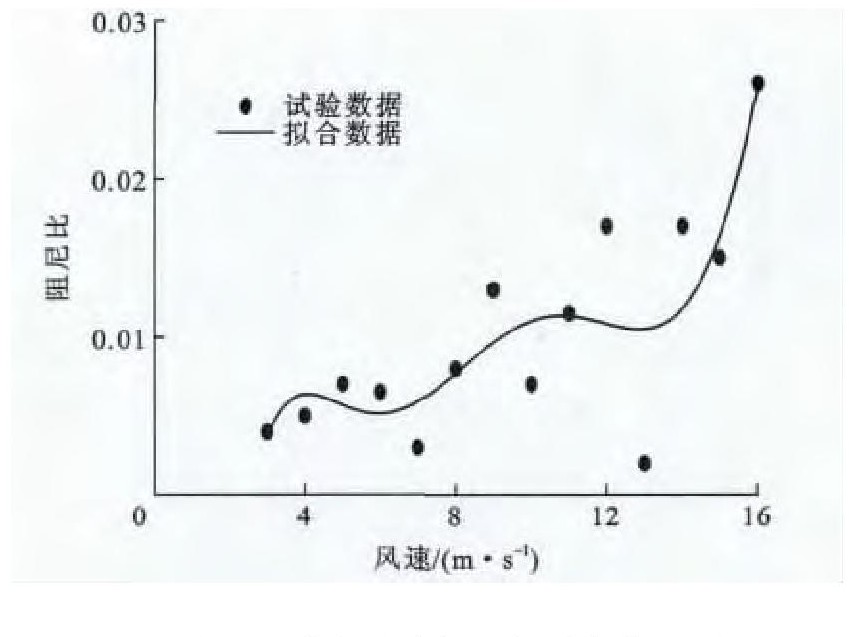
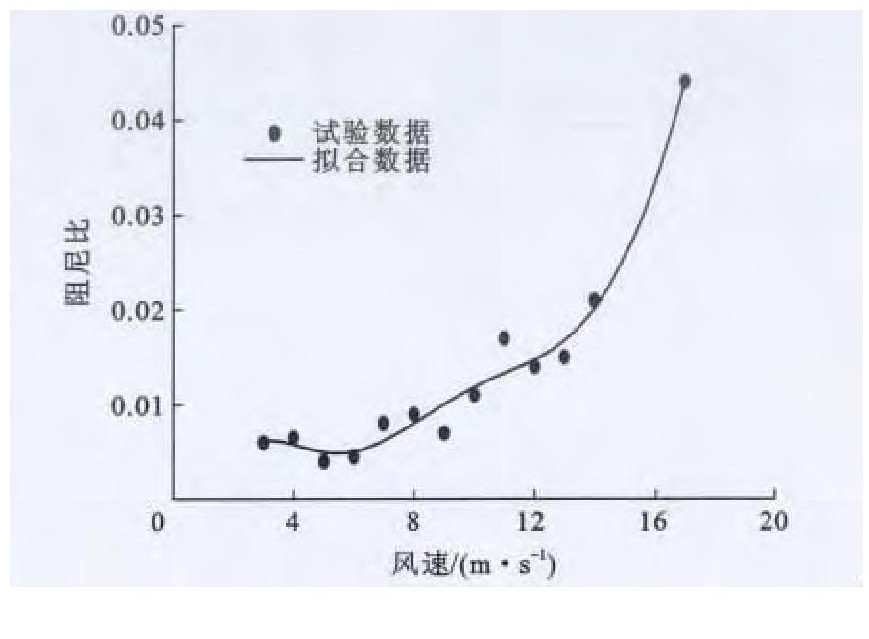
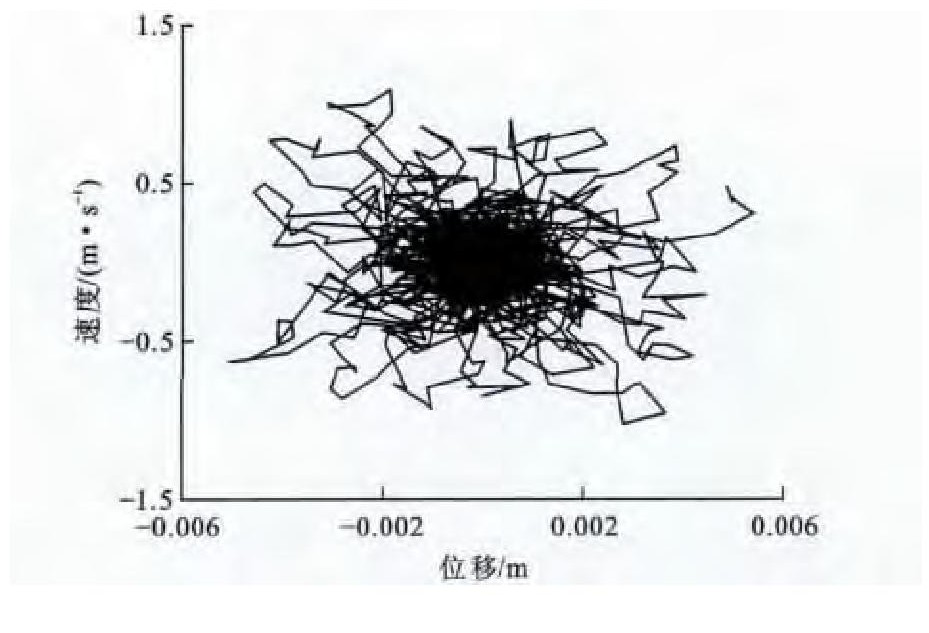
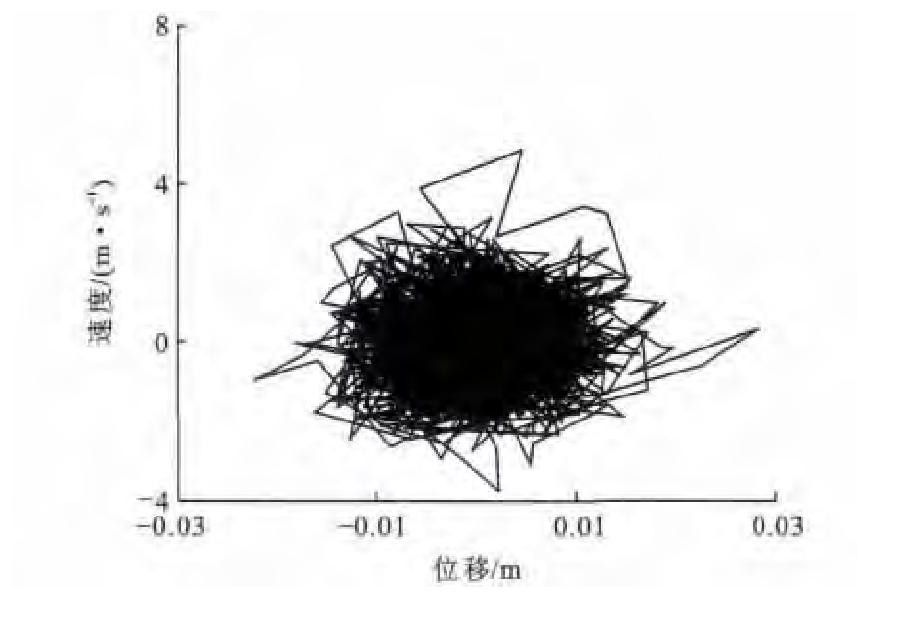
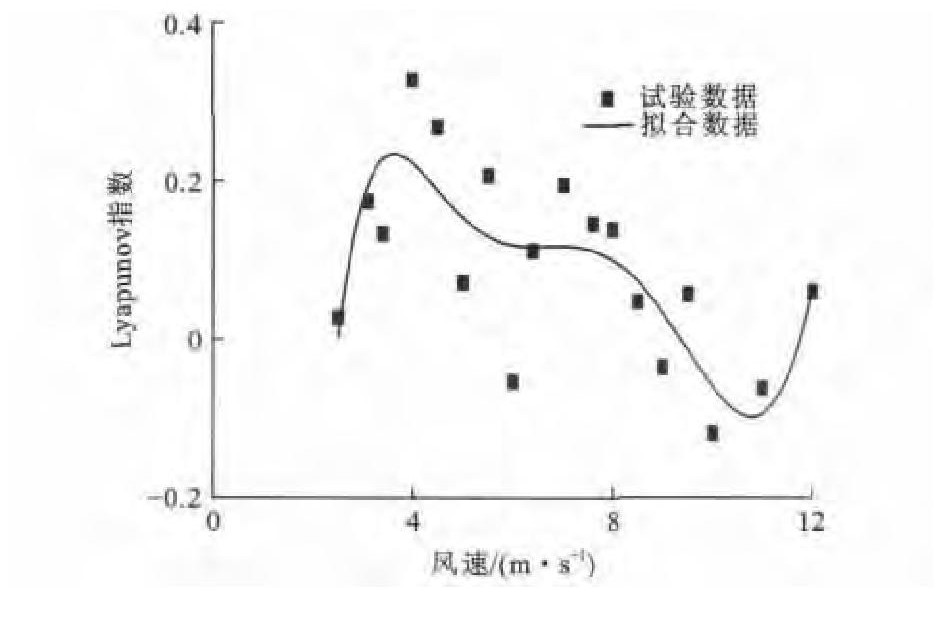
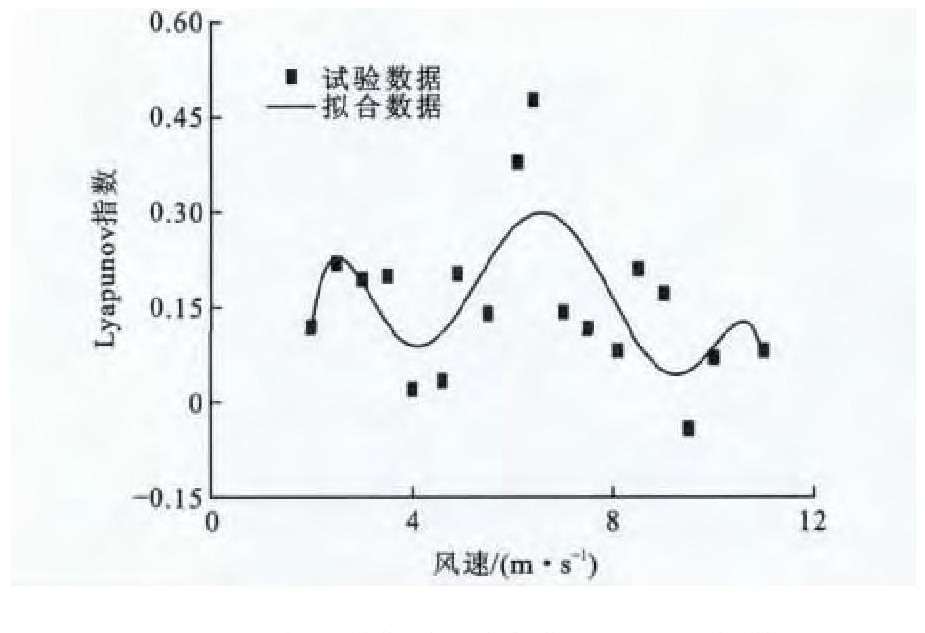
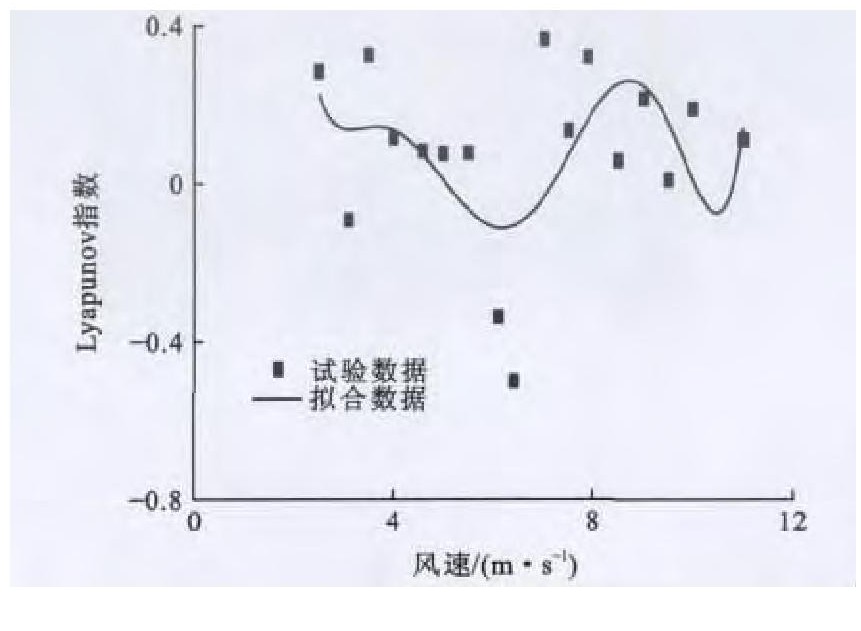
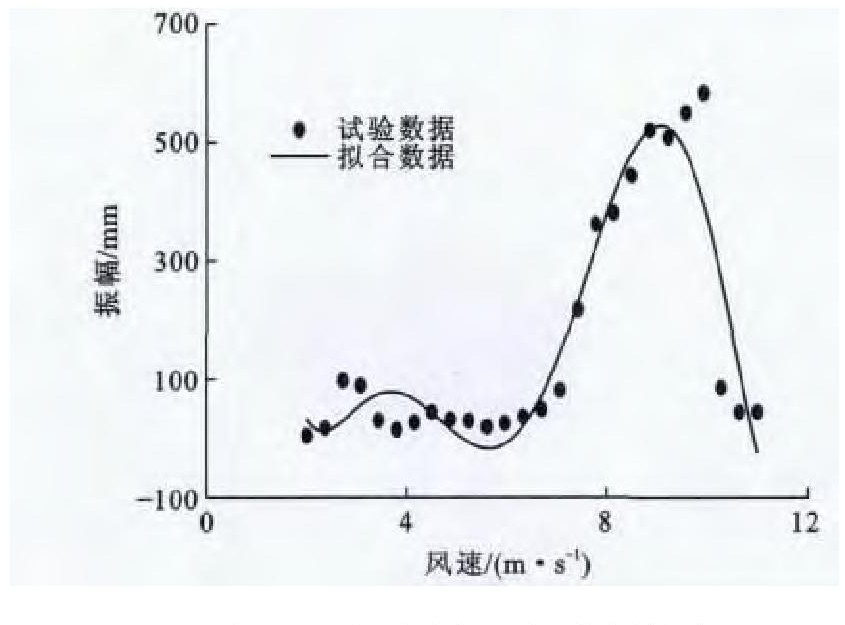
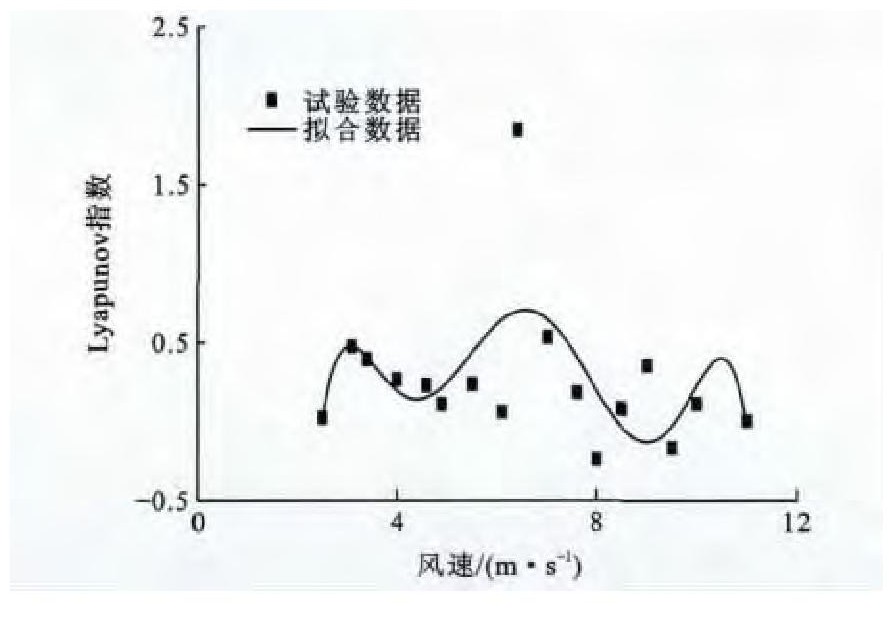
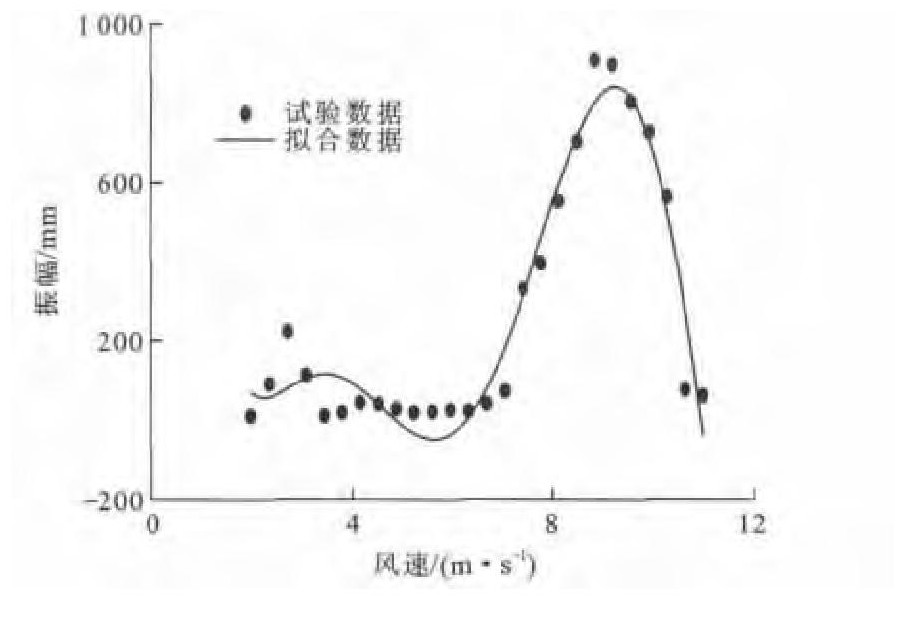
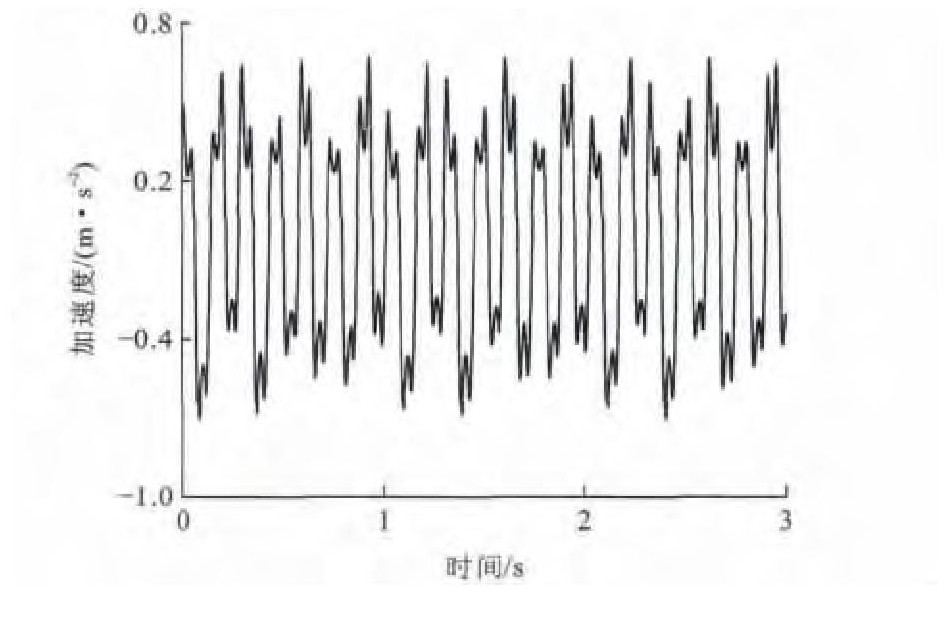
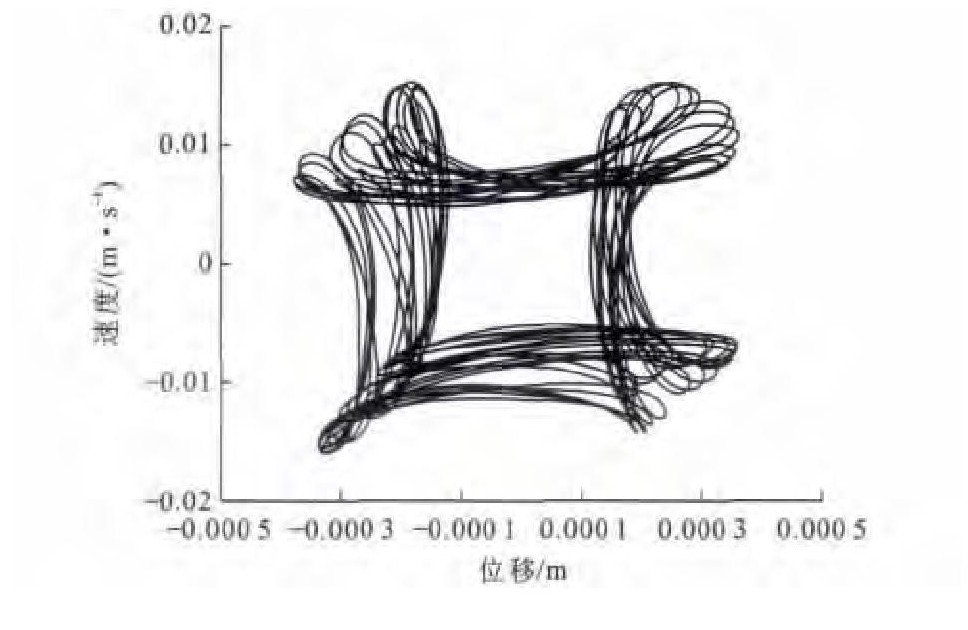
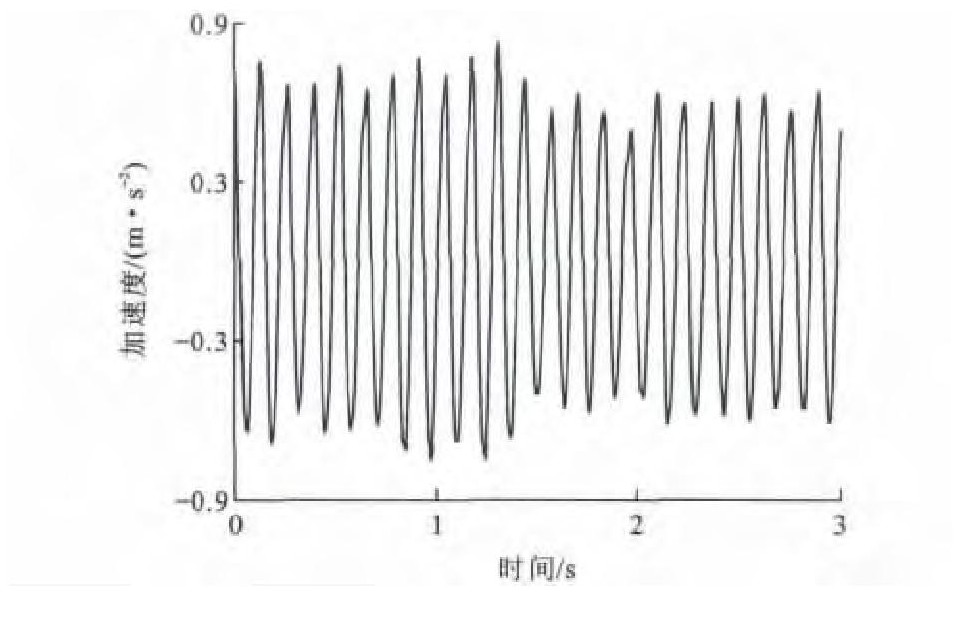
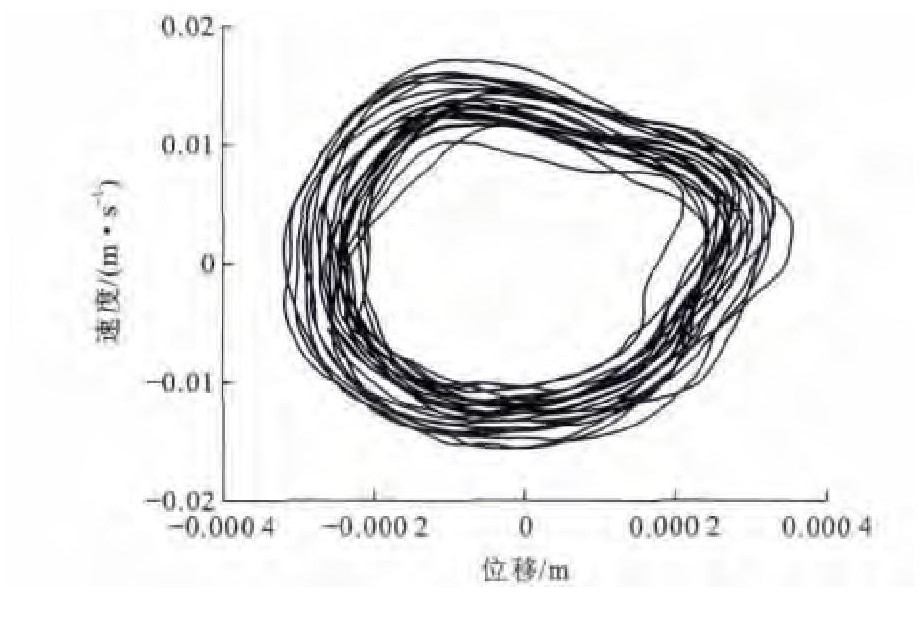
摘要:
利用非线性理论和混沌时间序列分析方法, 建立了桥梁风致振动的数学模型, 开发了计算桥梁振动加速度时间序列Lyapunov指数的MATLAB程序, 进行了桥梁涡振和颤振的风洞试验, 分析了不同风攻角下的桥梁风致振动的阻尼比、Lyapunov指数与风速的关系以及涡振振幅与风速的关系, 研究了桥梁颤振和涡振的混沌特性。试验结果表明: 在颤振试验中, 当风速小于颤振临界风速15.5m·s
-1
时, Lyapunov指数小于0, Lyapunov指数与阻尼比存在很大的相关性, 当风速从3m·s
-1
增大为18m·s
-1
时, 相空间逐渐发散; 在涡振试验中, 当风速从4.5m·s
-1
增大至8.5m·s
-1
时, Lyapunov指数大于0, 桥梁发生明显涡振, 并由多频振动逐渐转变为单频振动, 相空间变为一个较为理想的圆。桥梁的涡振与颤振均属于混沌现象, 低风速下的Lyapunov指数可用来预测高风速下的风致振动, 并且利用相空间也能识别涡振与颤振。
更多>
2014, 14(3): 34-42.
摘要
(
1471
)
HTML
(
589
)
PDF (683KB)
(
810
)
引用
(
)
载运工具运用工程
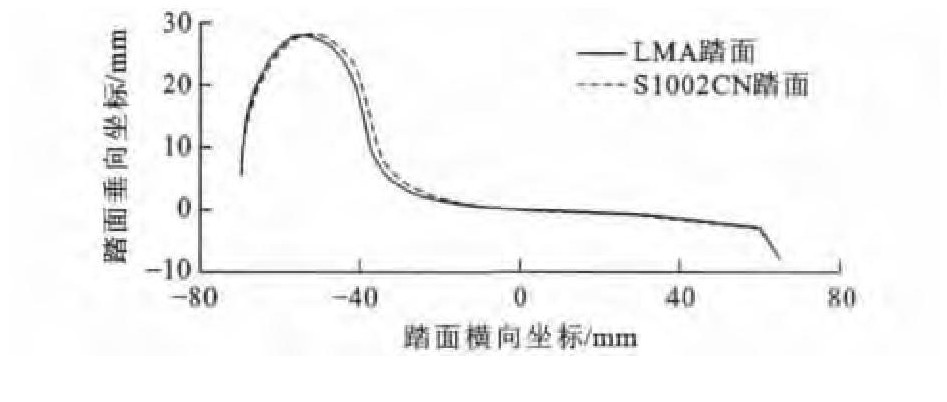
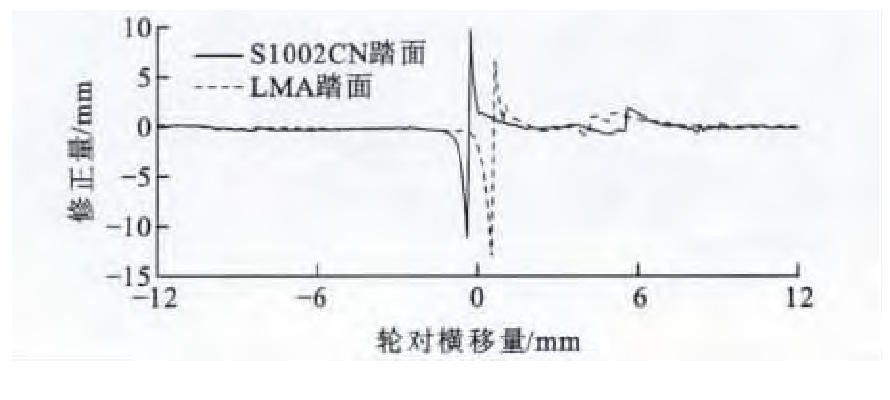
磨耗车轮踏面精确轮轨接触关系计算方法
干锋
,
戴焕云
,
高浩
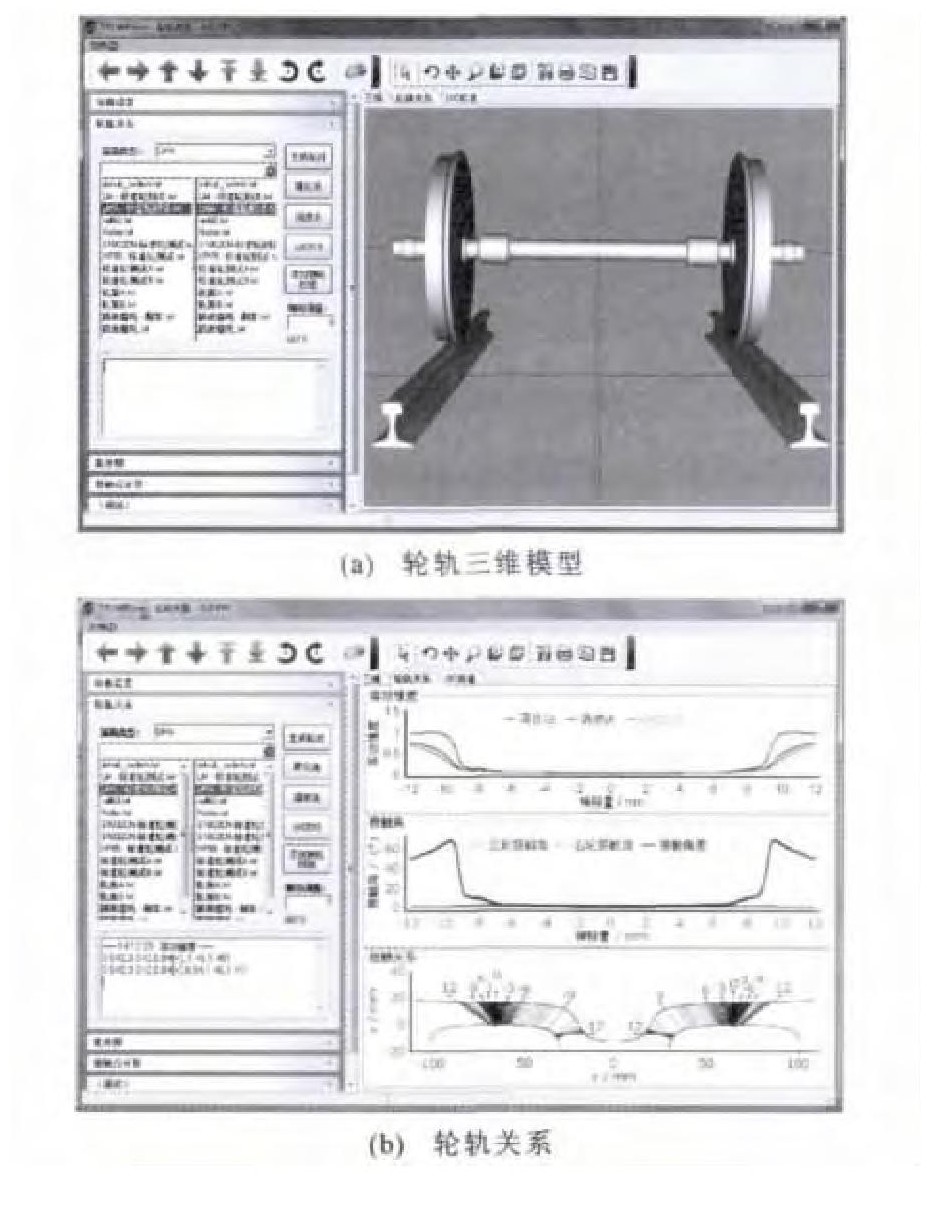
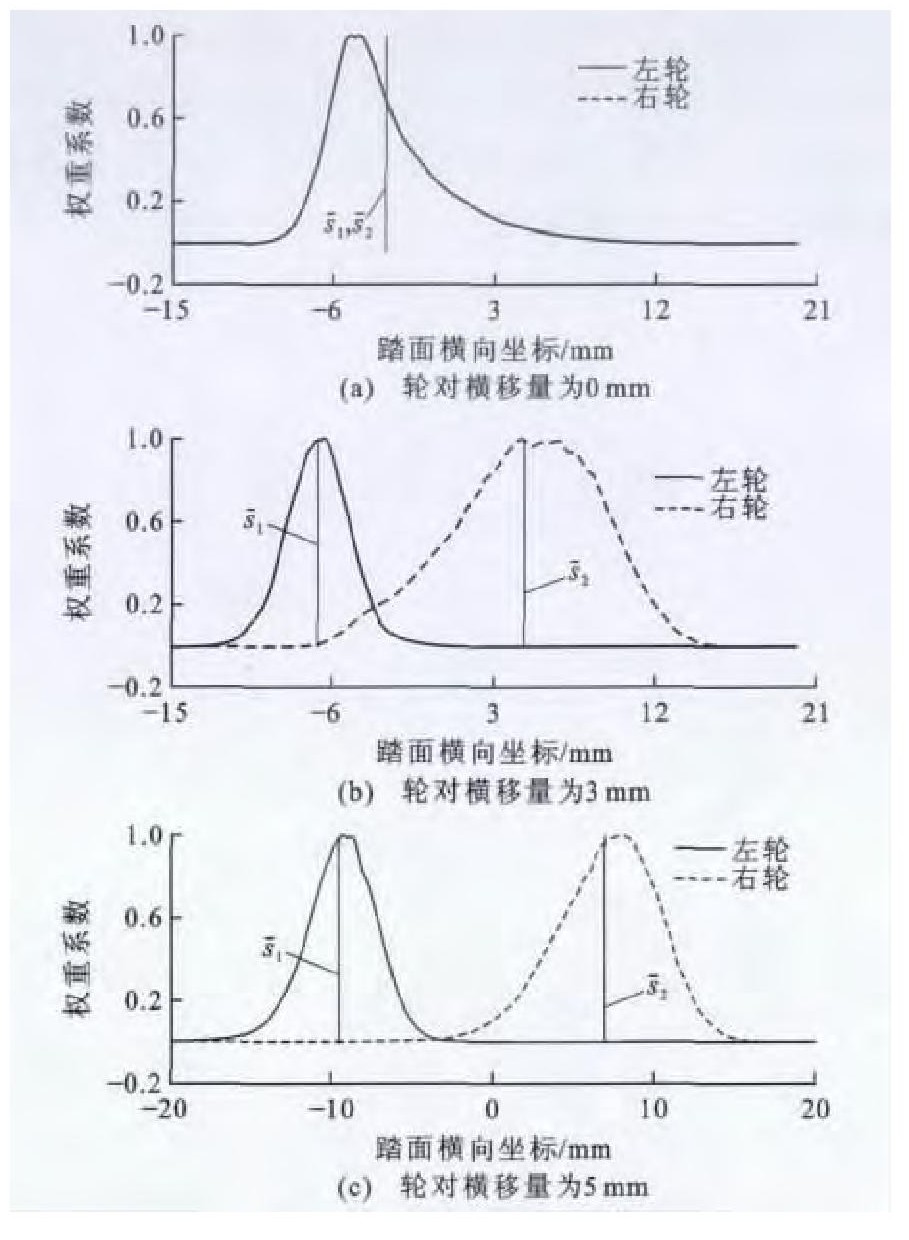
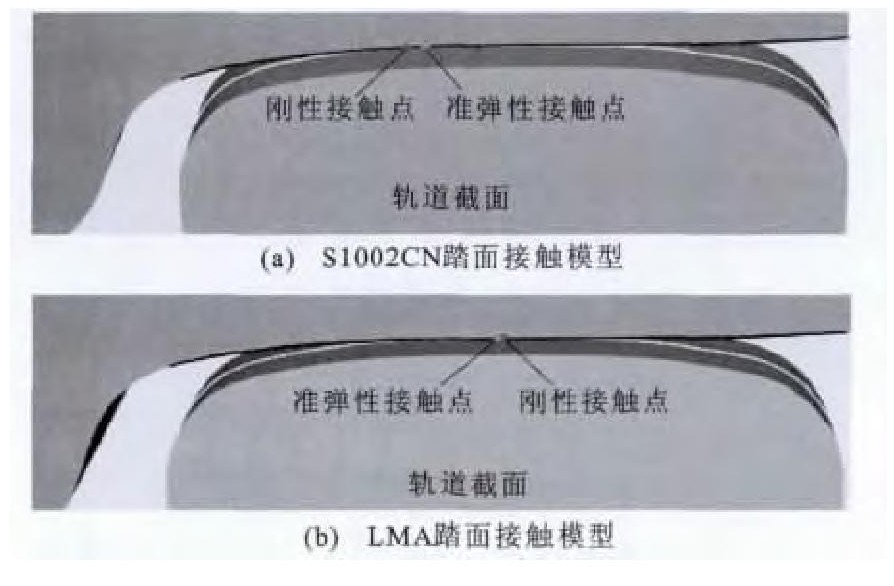
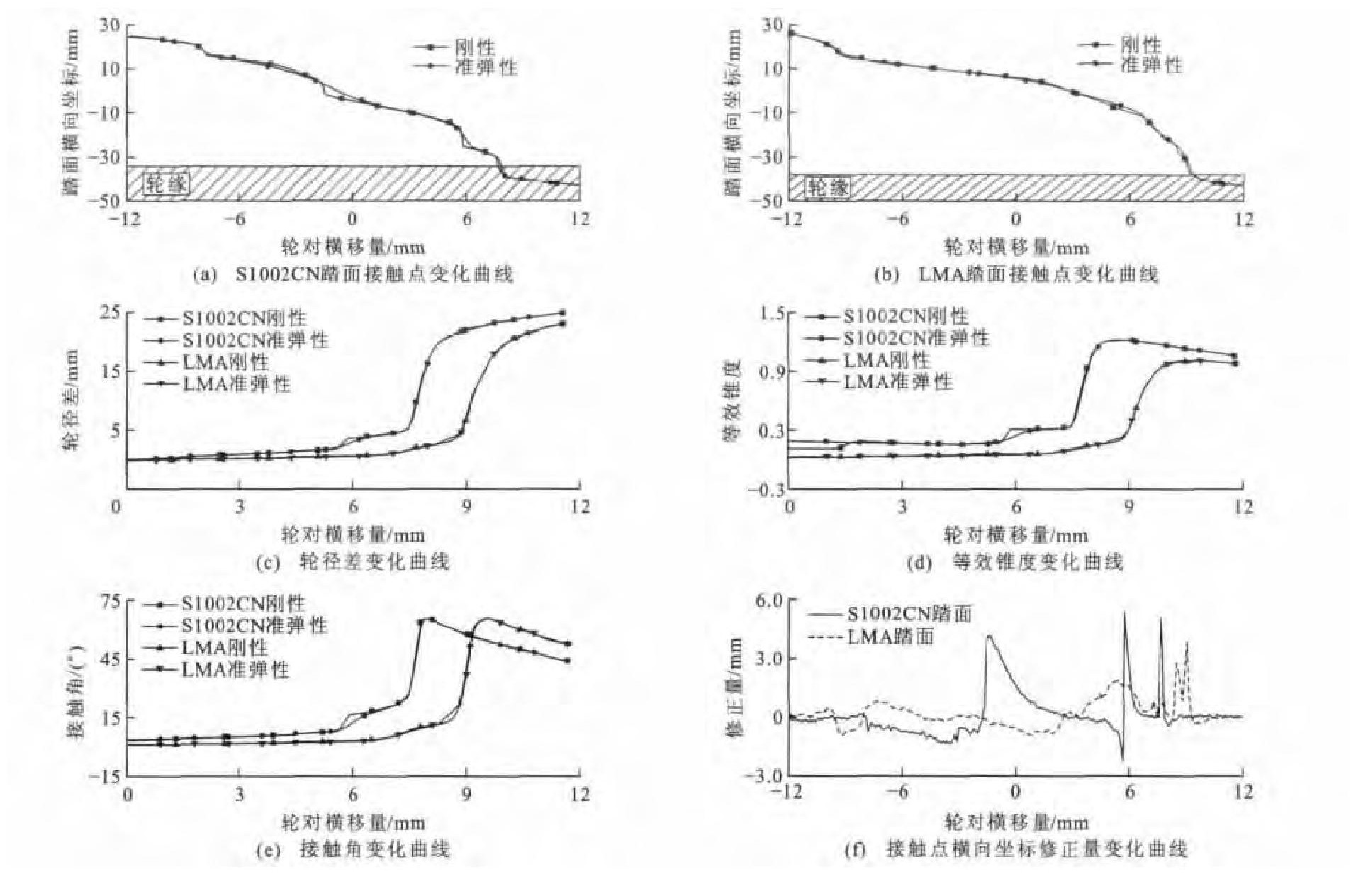
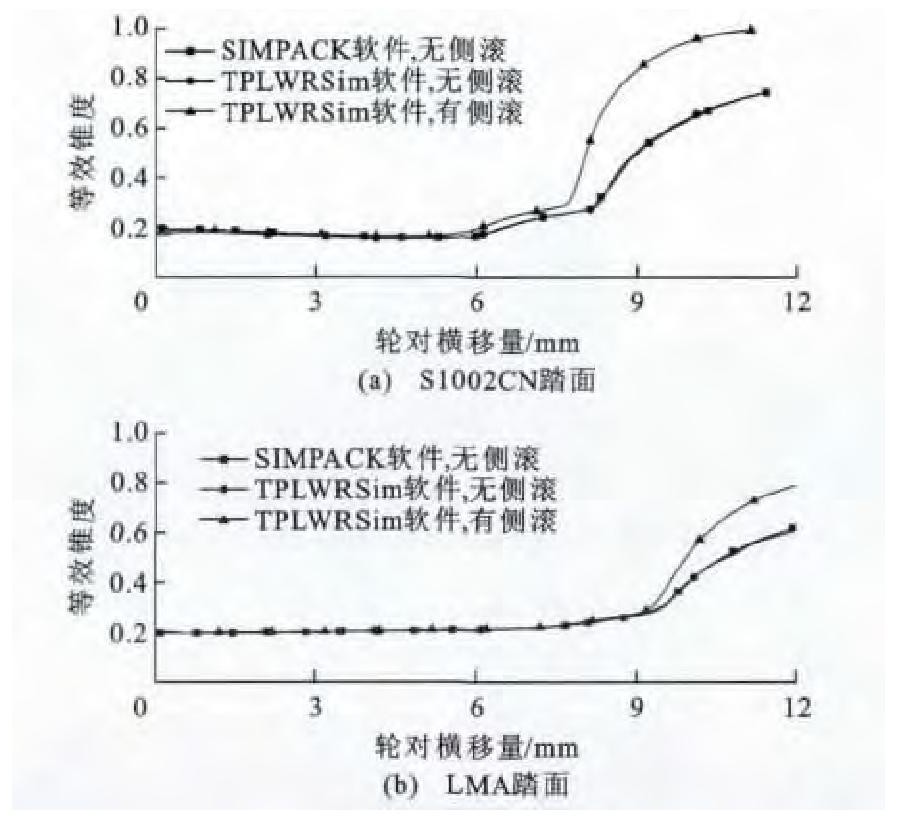
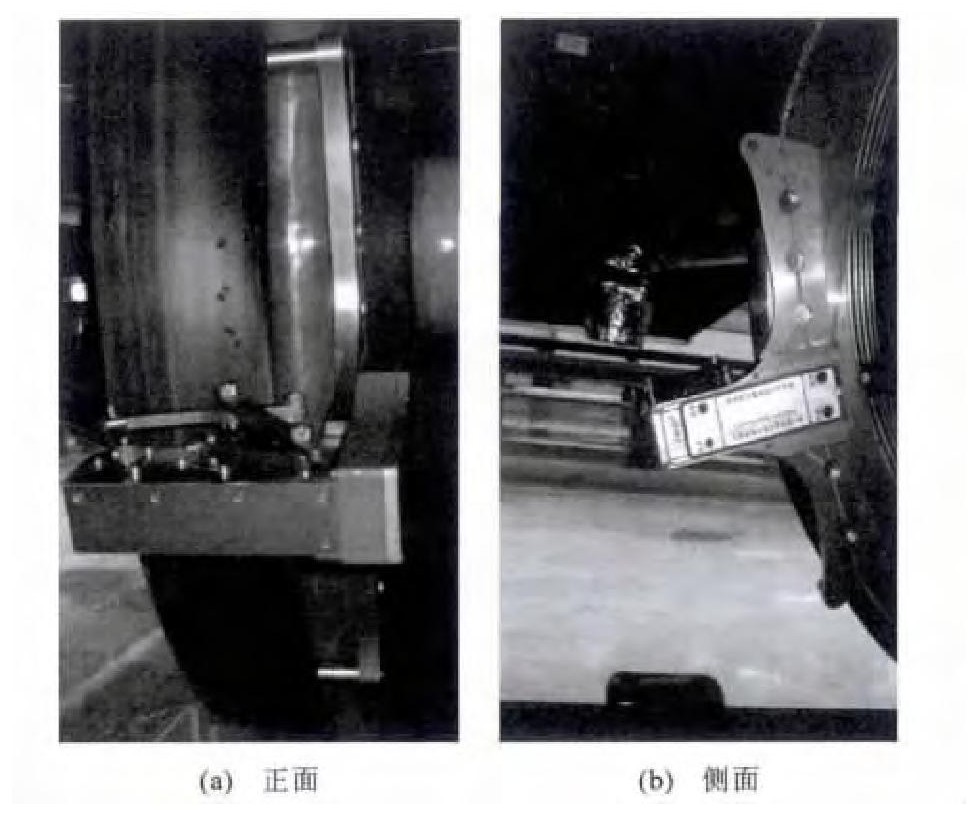
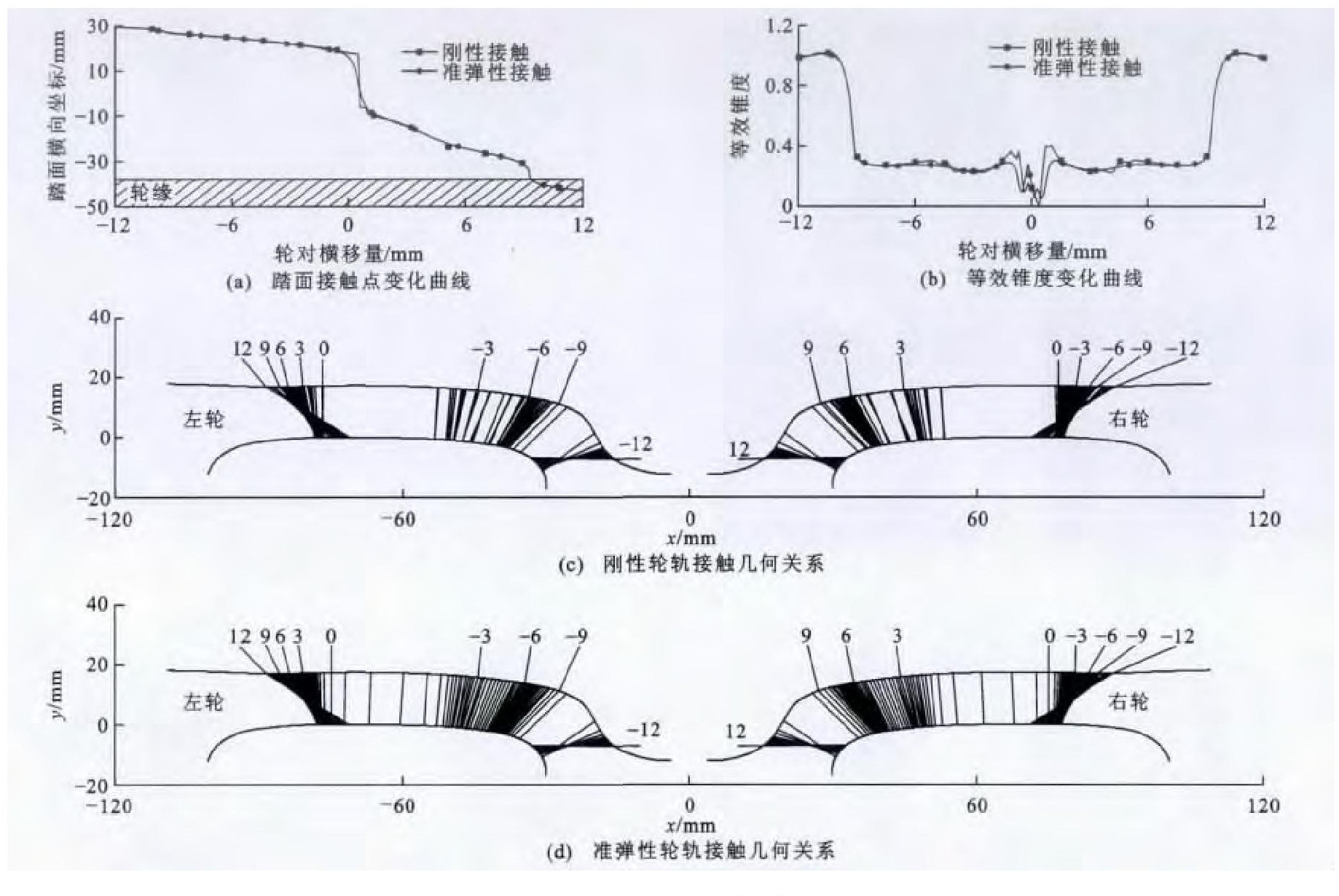
摘要:
基于轮轨刚性接触给出了轮轨准弹性接触的计算方法, 开发了TPLWRSim软件, 计算了高速动车组标准车轮踏面和磨耗车轮踏面轮轨接触关系, 并对TPLWRSim软件与SIMPACK软件的轮轨关系计算结果进行了对比分析。分析结果表明: 对于标准S1002CN踏面, 准弹性接触对接触点横坐标的修正量最大为5.26 mm, 磨耗后最大为11.10 mm; 对于标准LMA踏面, 修正量最大为3.82 mm, 磨耗后最大为13.14 mm。由TPLWRSim软件计算的准弹性轮轨接触关系与SIMPACK计算结果基本一致。轮轨准弹性接触能很好地改变刚性接触点跳变、不均匀、不连续的特征, 使其变得更光滑连续。计算结果可用于磨耗后踏面的跟踪测试, 具有很好的实用价值。
更多>
2014, 14(3): 43-51.
摘要
(
1246
)
HTML
(
673
)
PDF (721KB)
(
1137
)
引用
(
)
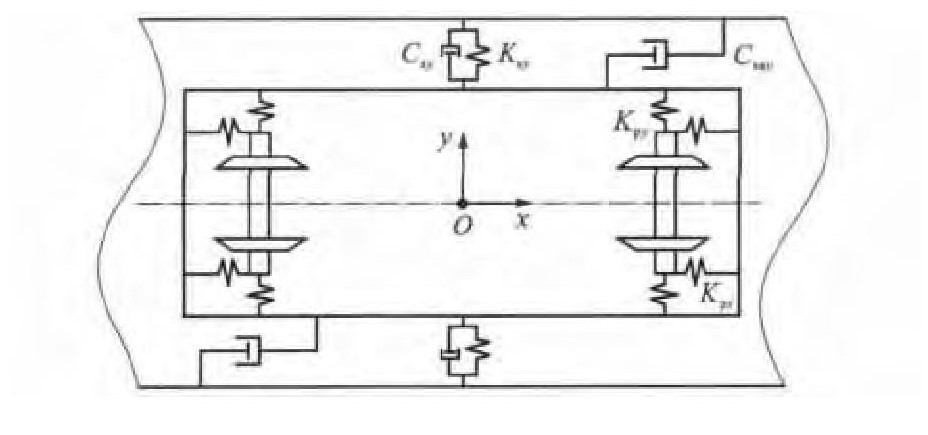
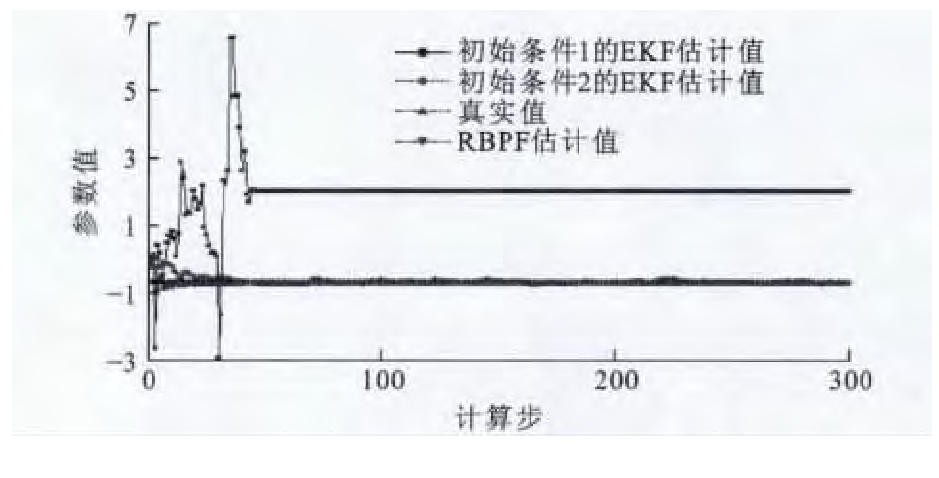
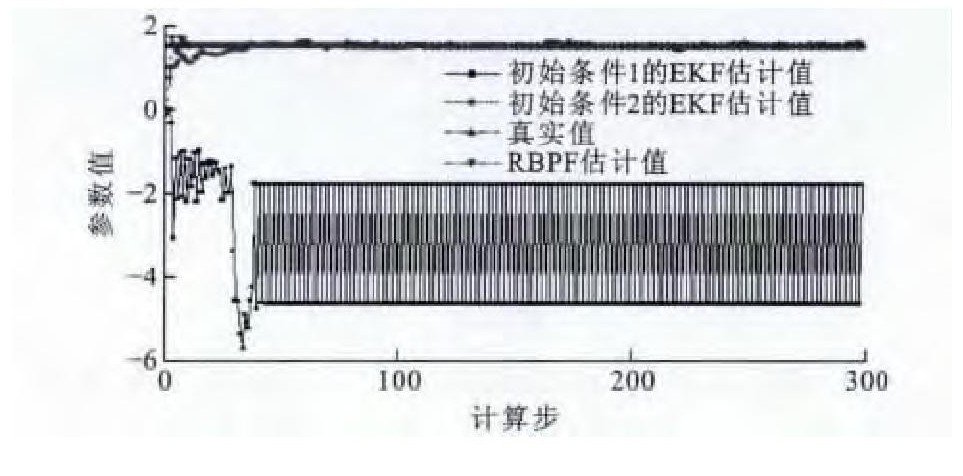
基于边缘粒子滤波的高速列车性能参数估计方法
丁建明
,
林建辉
,
王晗
,
黄晨光
,
赵洁
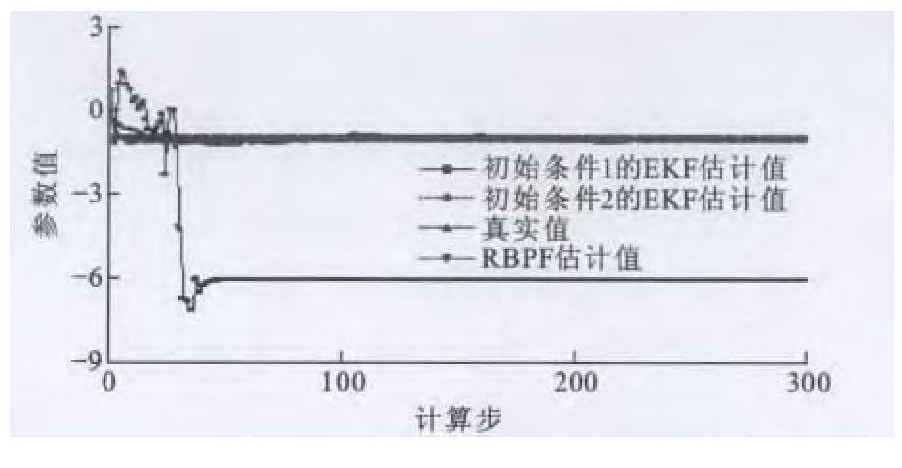
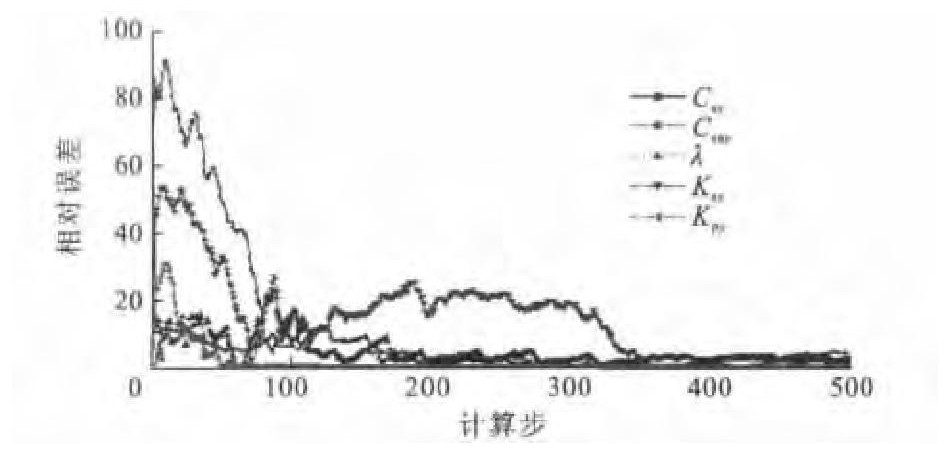
摘要:
针对高速列车参数估计中参数增广为状态变量时所出现的非线性问题, 提出一种基于边缘粒子滤波的参数估计方法。在Rao-Blackwellised (RB) 框架下, 将高速列车性能参数估计的概率模型进行分块化处理。应用卡尔曼滤波对线性的状态块进行一步预测和测量更新, 应用粒子滤波对非线性的参数块进行一步预测与测量更新, 实现参数的动态估计, 并通过理论分析和高速列车参数估计实例验证了方法的有效性。分析结果表明: 与经典的扩展卡尔曼滤波相比, 提出的方法具有对初值免疫和算法稳定的特点; 参数估计误差快速收敛到5%以内, 且提出的参数估计方法是无偏估计, 具有较好的工程适用性。
更多>
2014, 14(3): 52-57.
摘要
(
1093
)
HTML
(
484
)
PDF (409KB)
(
857
)
引用
(
)
基于加密型值表的改进水尺计重方法
刘春雷
,
张秀凤
,
孙霄峰
,
尹勇
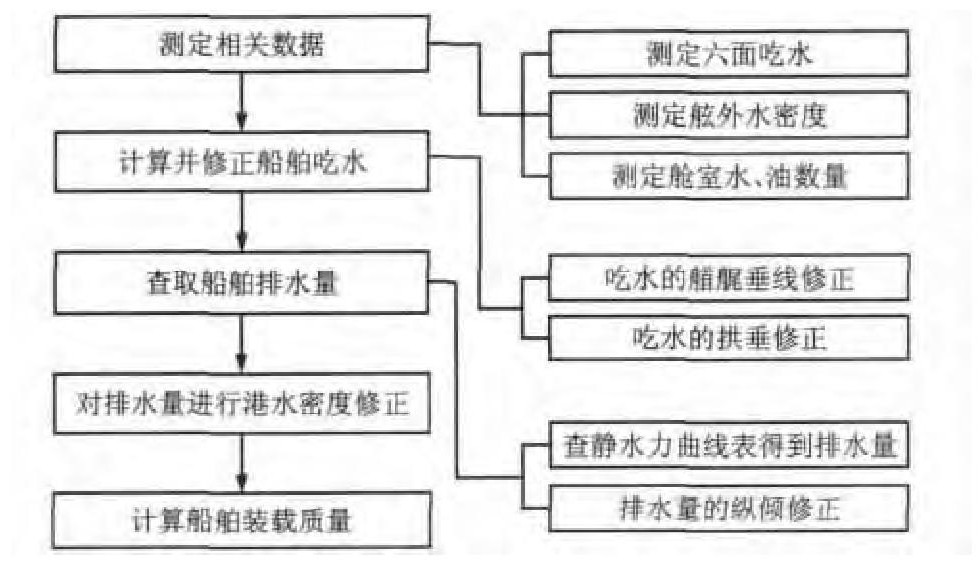
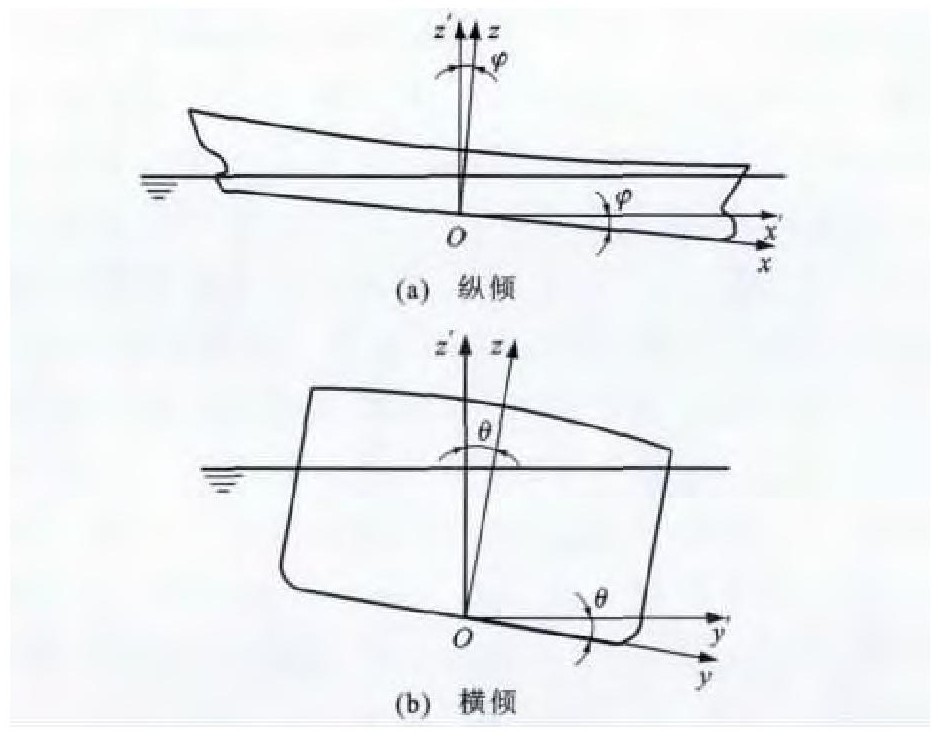
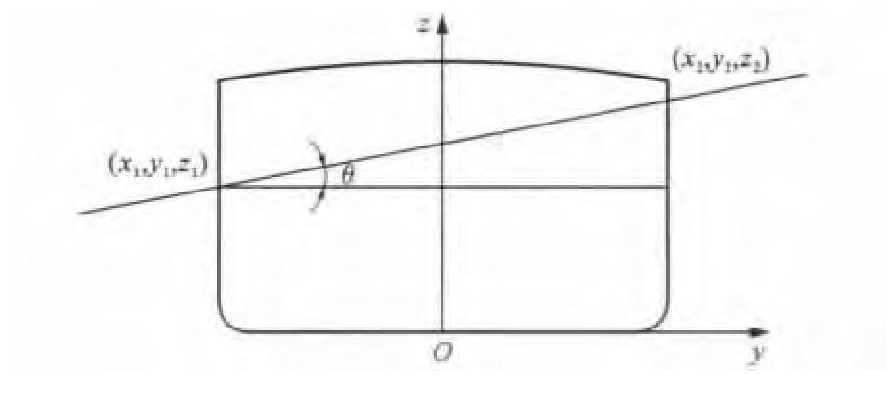
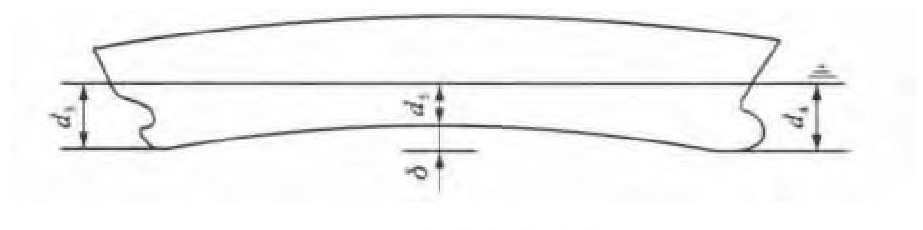
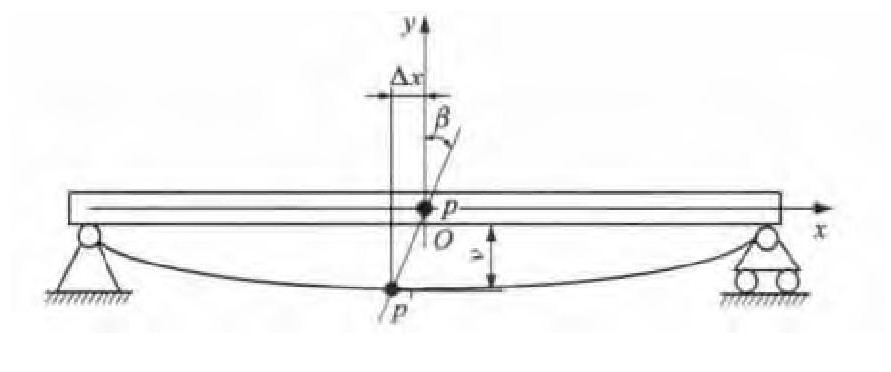
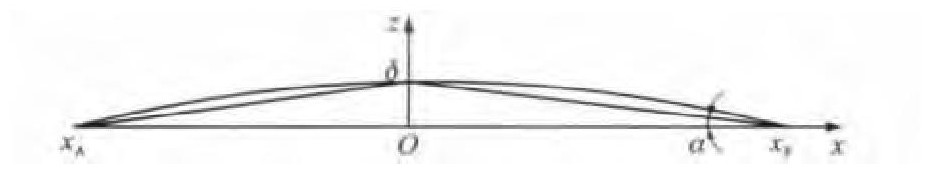
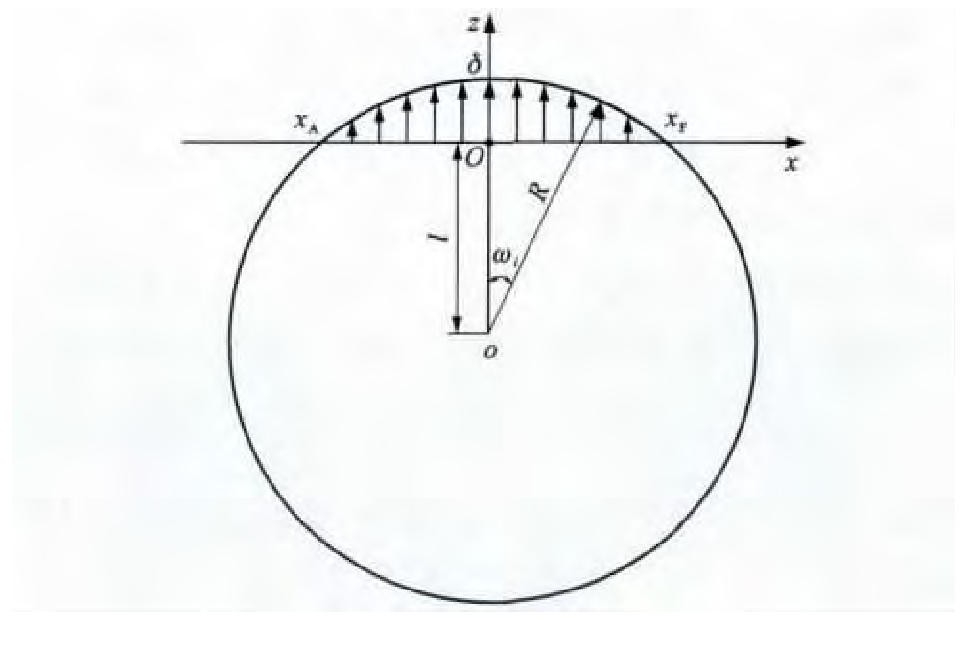
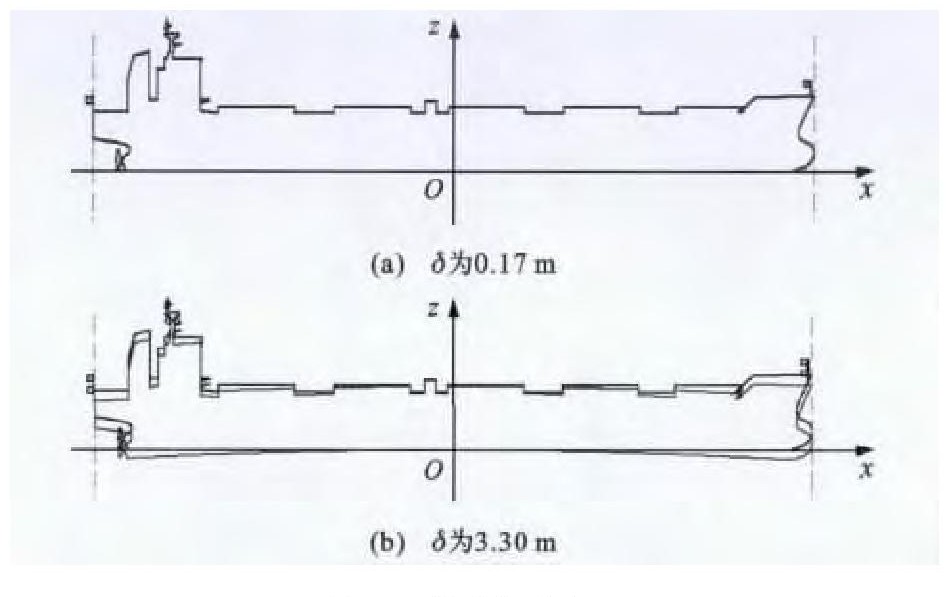
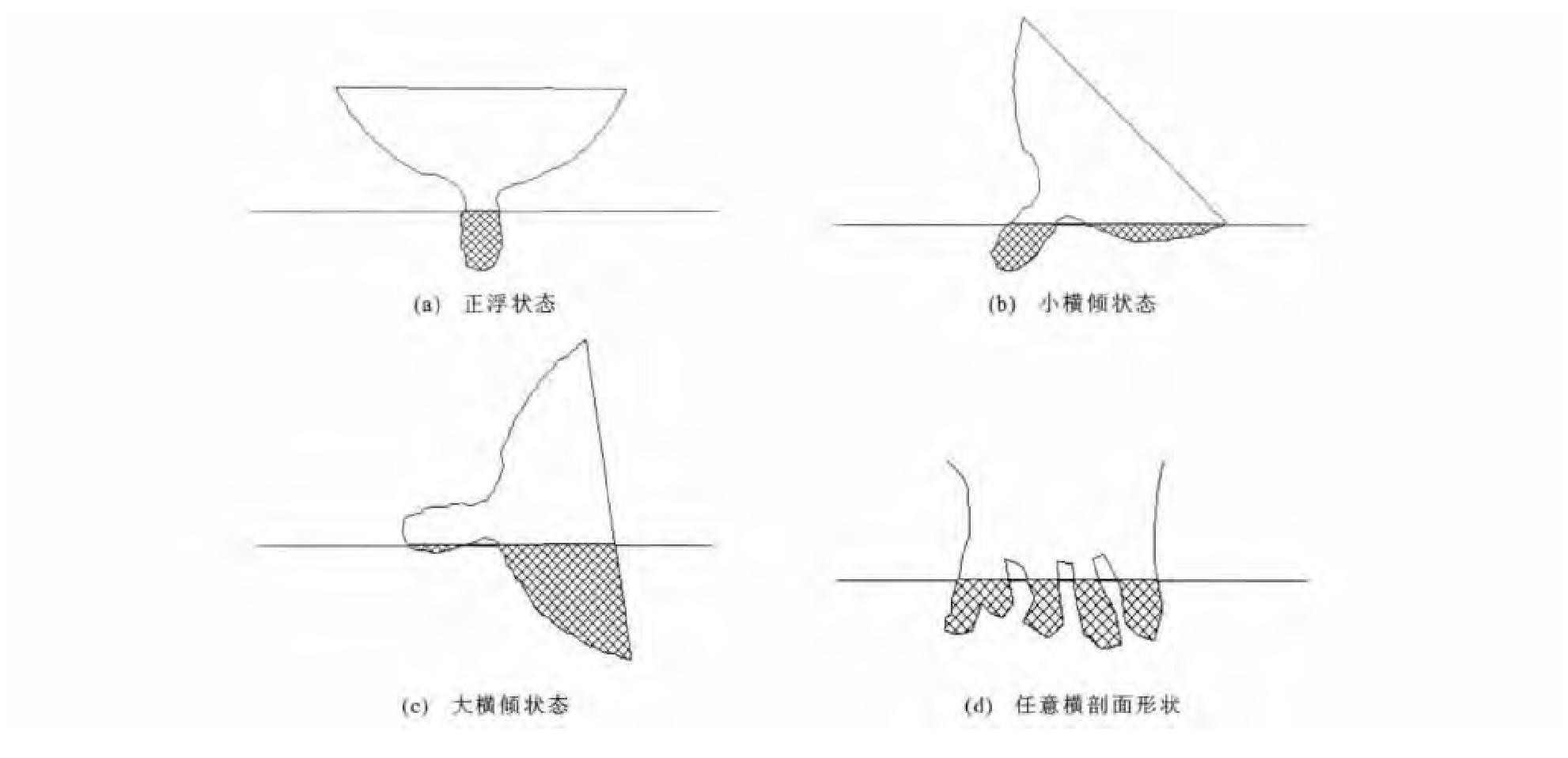
摘要:
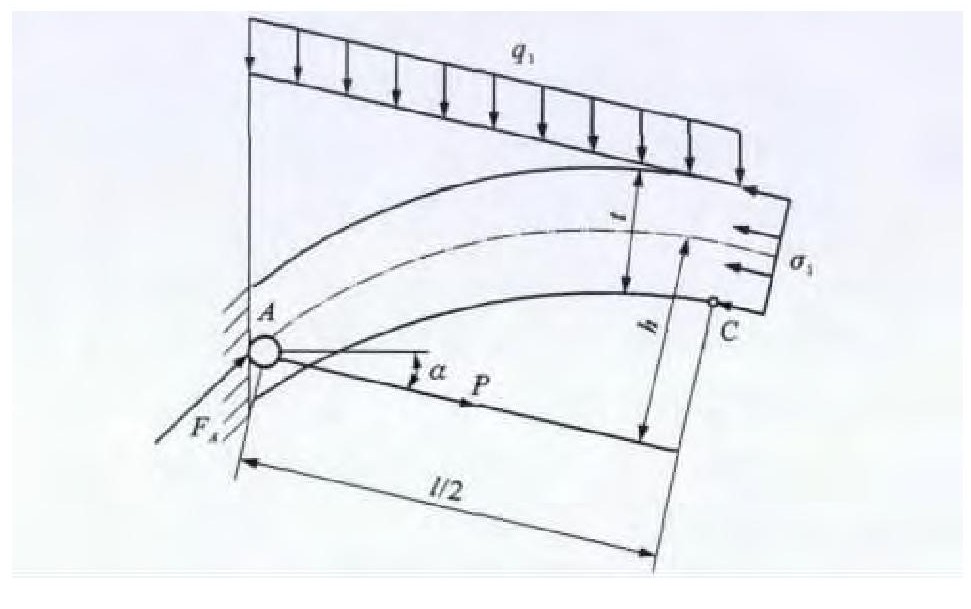
为了提高水尺计重的精度, 提出一种不依赖于船舶装载手册的改进水尺计重方法。基于加密型值表建立船舶高精度数据库, 并计算船舶排水量。根据六面吃水数据计算船舶浮态参数与中垂(拱) 量。根据材料力学中梁的弯曲理论, 用圆弧拟合船舶拱垂变形曲线, 计算出船舶每一站的中垂(拱) 量, 通过对型值坐标点进行坐标修正, 得到船舶中垂(拱) 状态下的数据库。根据浮态参数, 通过坐标系变换、S-H剪裁算法计算船舶自由浮态下的排水量。以某散货船为例, 分别计算了船舶正浮、纵倾与中拱状态下的排水量, 并与传统水尺计重方法进行了比较分析。计算结果表明: 正浮时改进水尺计重方法相对误差较小, 平均为0.085 6%, 纵倾时平均相对误差增大到0.414 5%, 中拱状态下平均相对误差增大为0.619 9%。改进的水尺计重方法提高了计算精度, 且适用于船舶自由浮态, 具有一定的工程应用价值。
更多>
2014, 14(3): 58-64.
摘要
(
1627
)
HTML
(
621
)
PDF (489KB)
(
847
)
引用
(
)
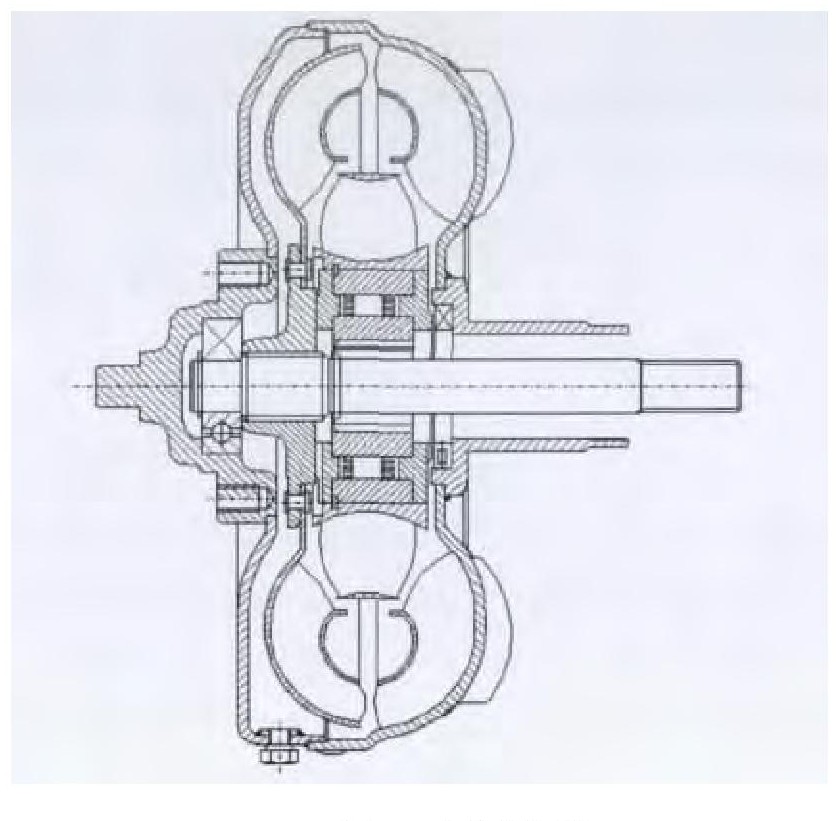
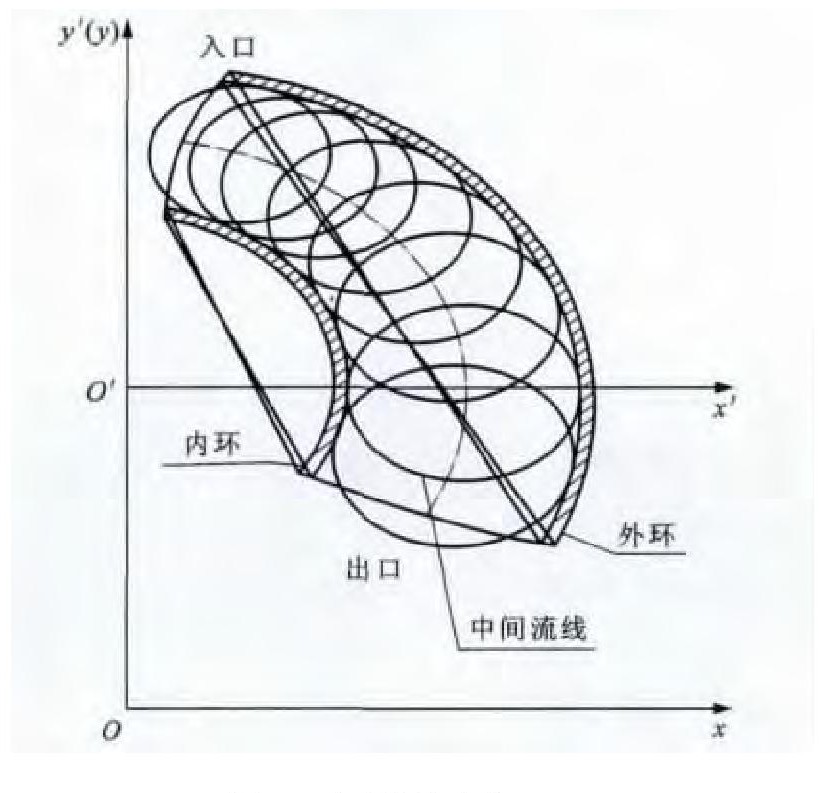
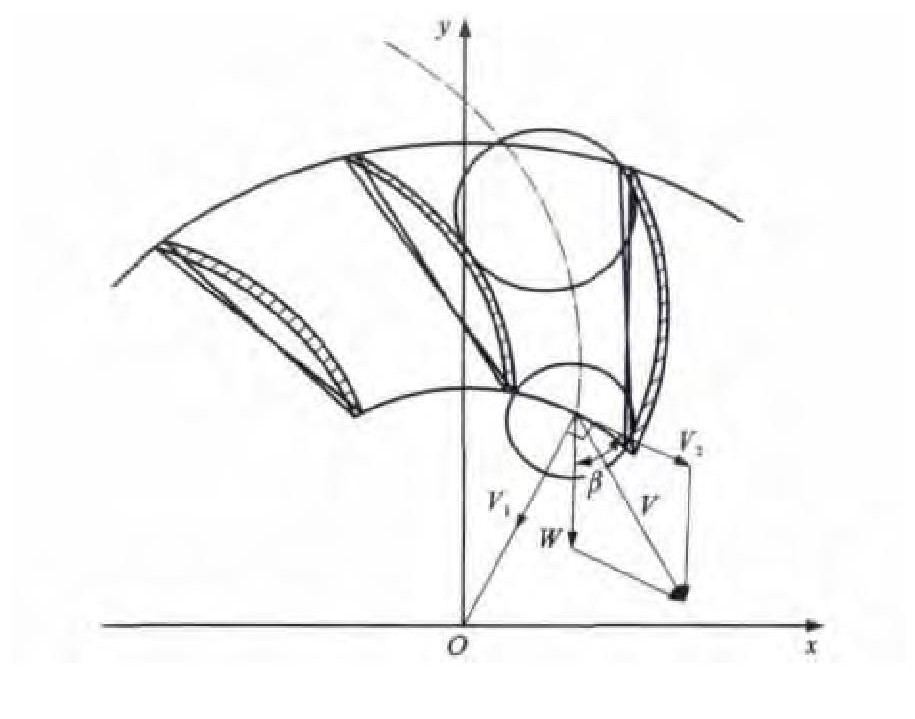
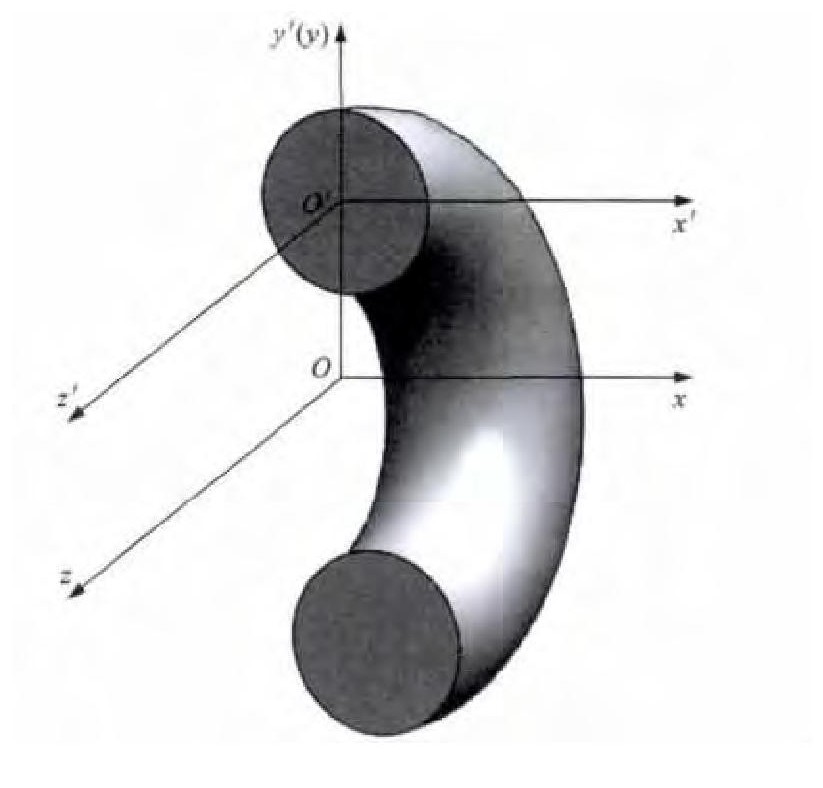
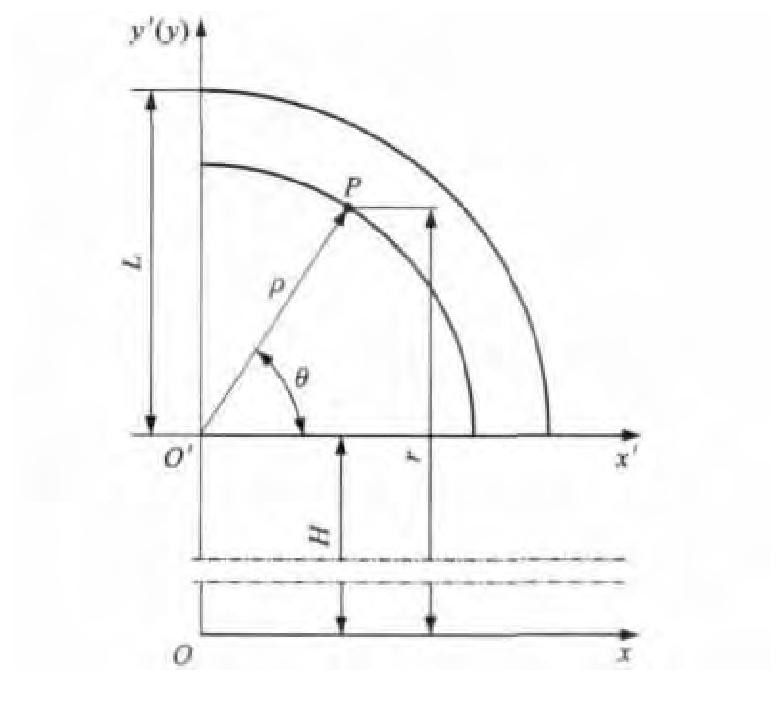
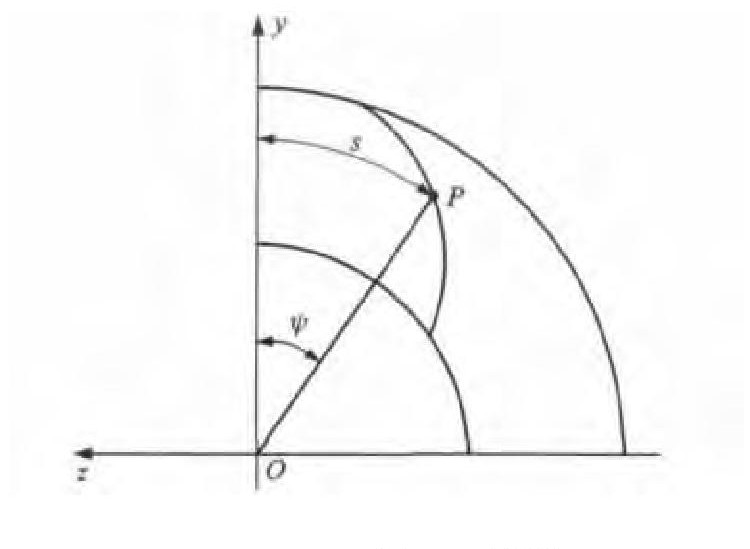
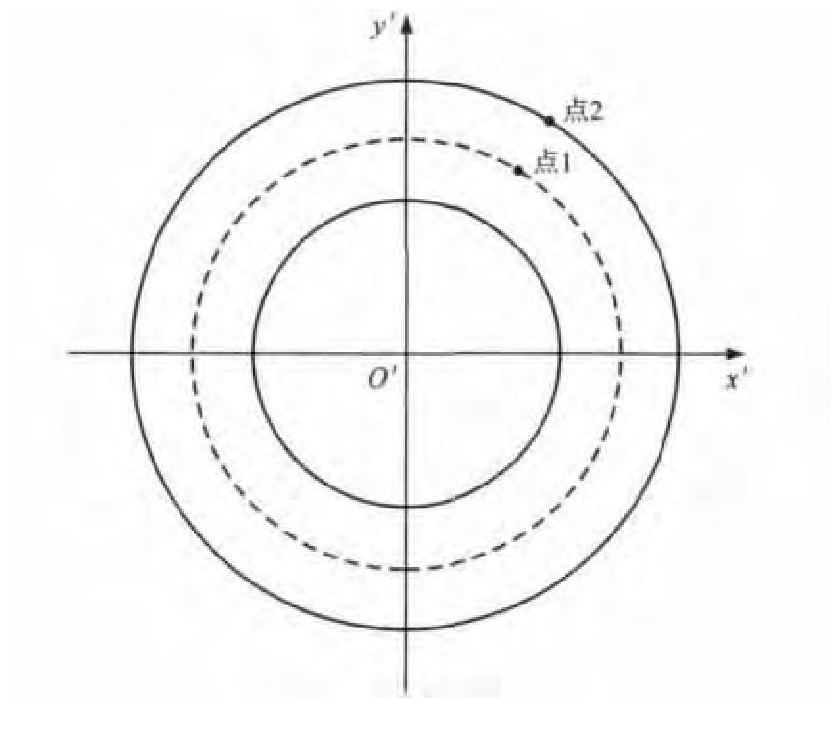
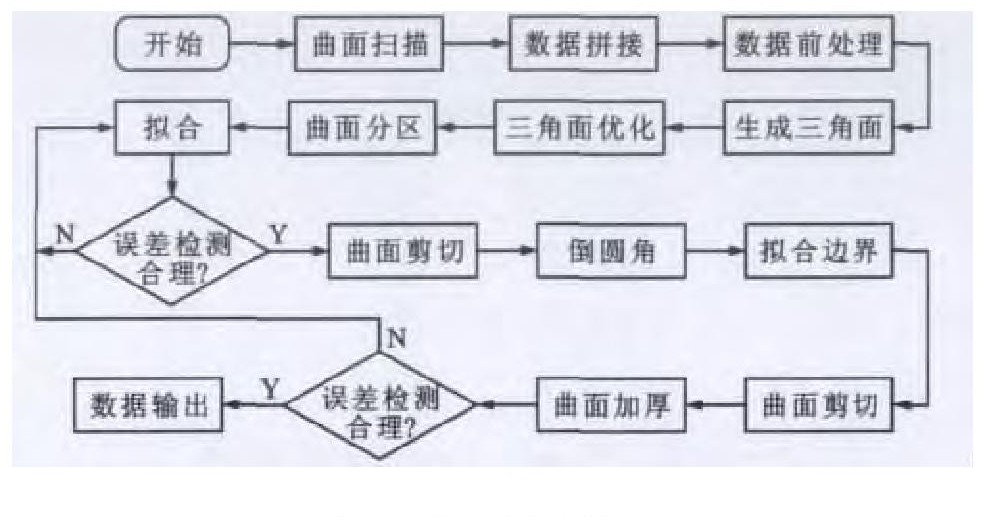
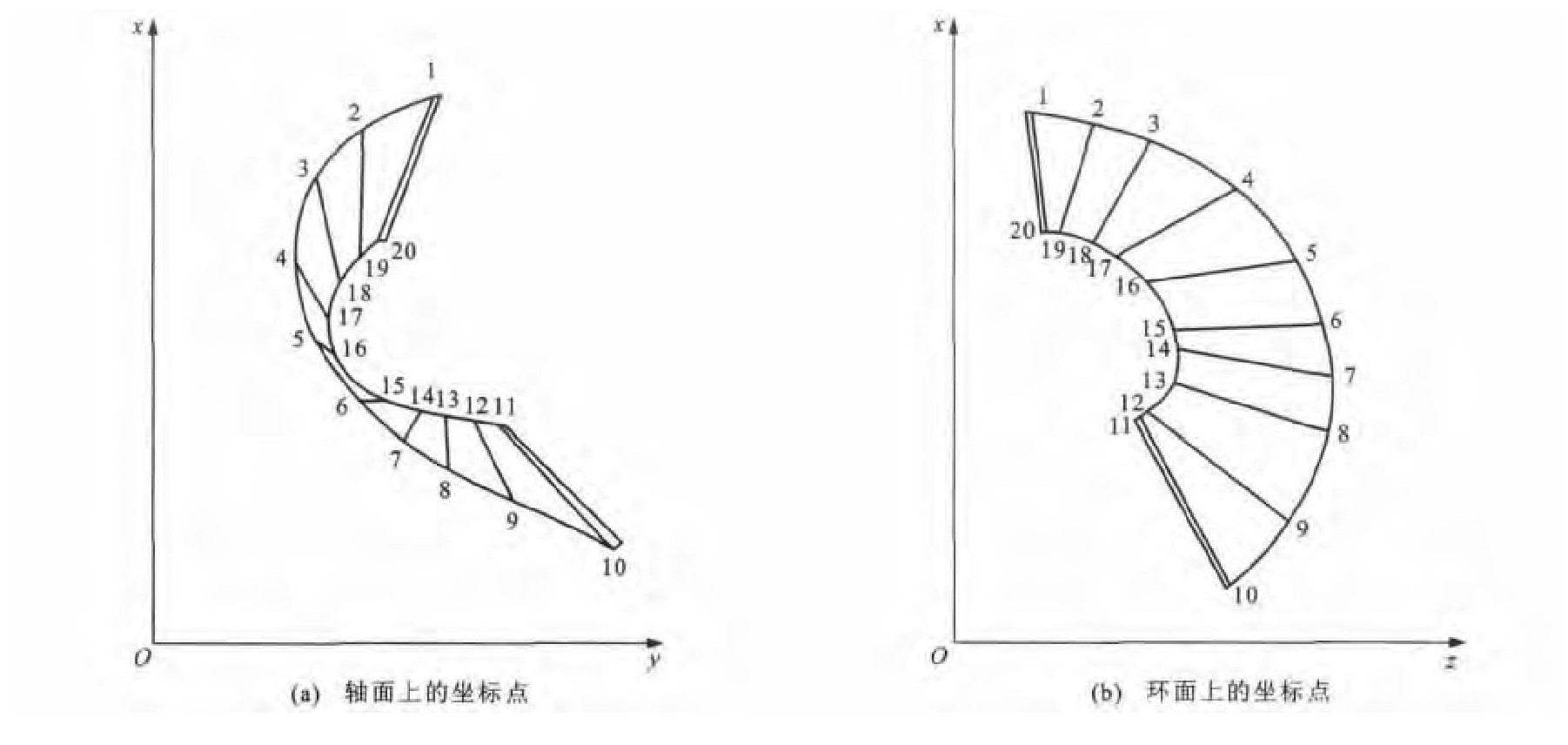
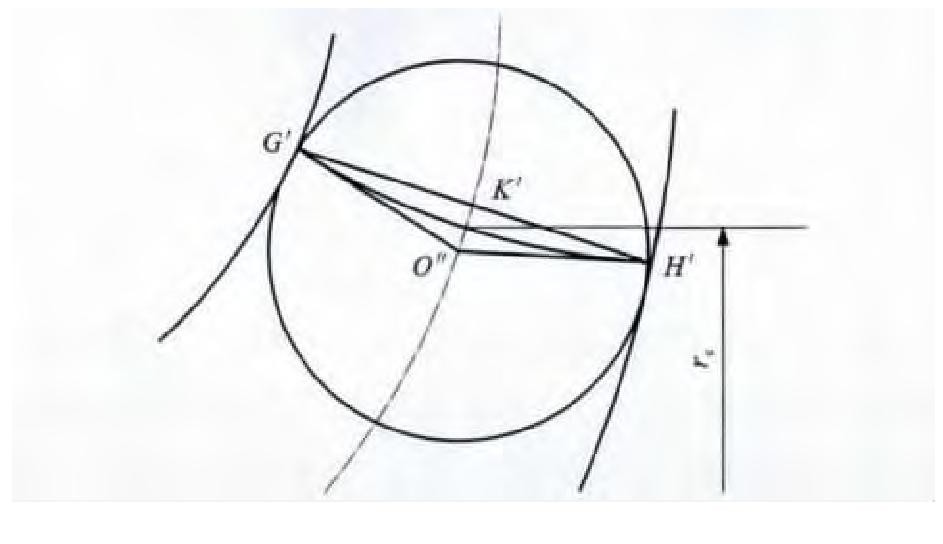
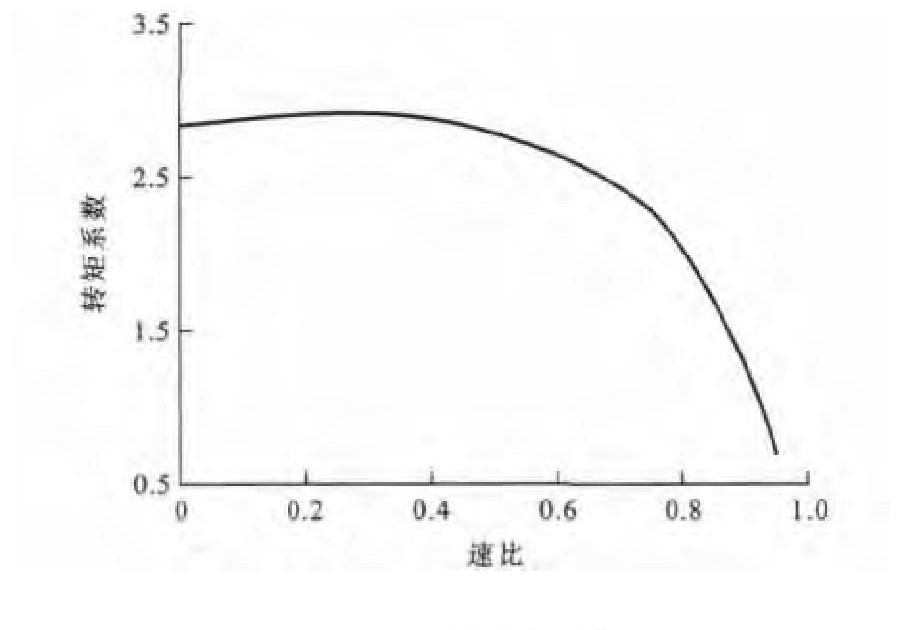
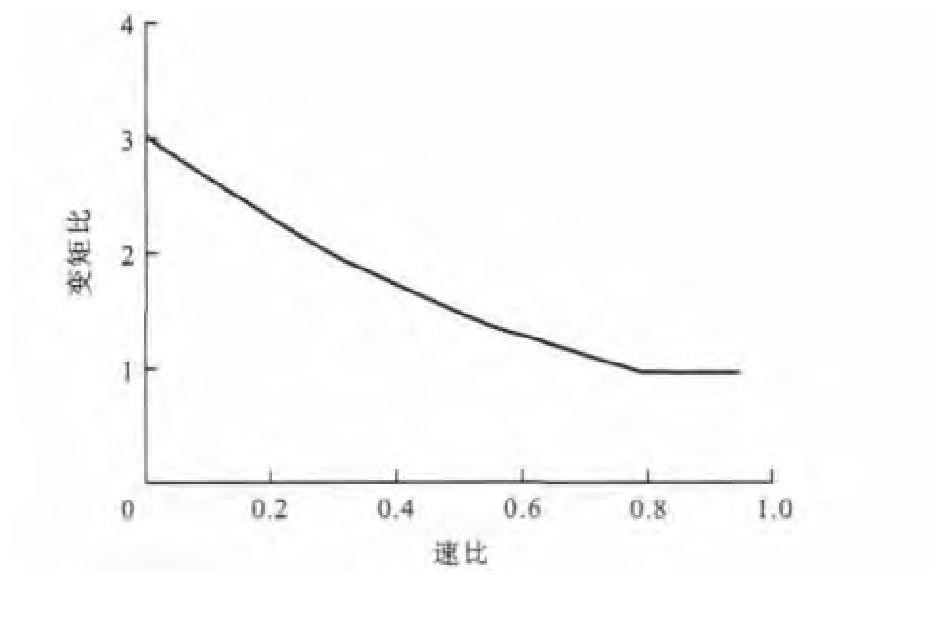
基于反求技术的液力变矩器涡轮叶片设计
刘宗其
,
李志远
,
夏光
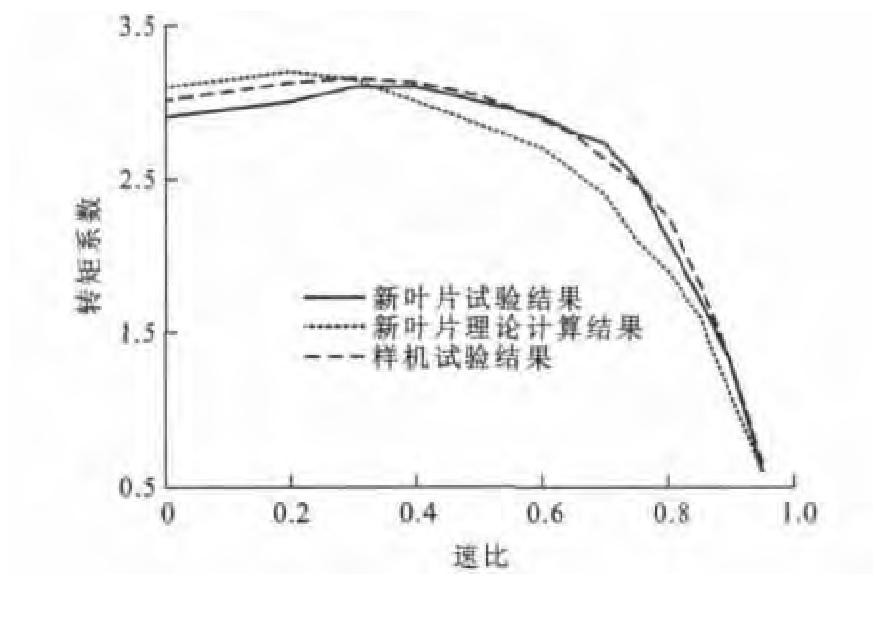
摘要:
为了解决变矩器设计周期过长和对经验数据依赖过多的问题, 运用反求技术对冲压型涡轮叶片数据进行计算、分析, 在建立广义的液流环坐标系基础上, 提炼出涡轮叶形设计流线的数学表达式, 获得叶片内、外环加工点的准确坐标, 推导出新的变矩器原始特性表达式。根据计算结果制成新的涡轮叶片, 比较了装有新涡轮叶片的液力变矩器与原样机的特性。试验结果表明: 新设计的变矩器和原样机的效率和失速变矩仅降低了0.5%, 转矩系数降低了1%, 新叶片与原叶片的误差小于0.605 2%, 因此, 本文在环坐标系下得到变矩器环面和轴面方程式是准确的, 保证了产品的设计性能, 并缩短了研发周期, 拓宽了变矩器研发的新途径。
更多>
2014, 14(3): 65-72.
摘要
(
1102
)
HTML
(
338
)
PDF (537KB)
(
758
)
引用
(
)
基于磨痕检测的润滑油抗磨性能测定方法
肖梅
,
张雷
,
韩光
,
杨京帅
,
刘龙
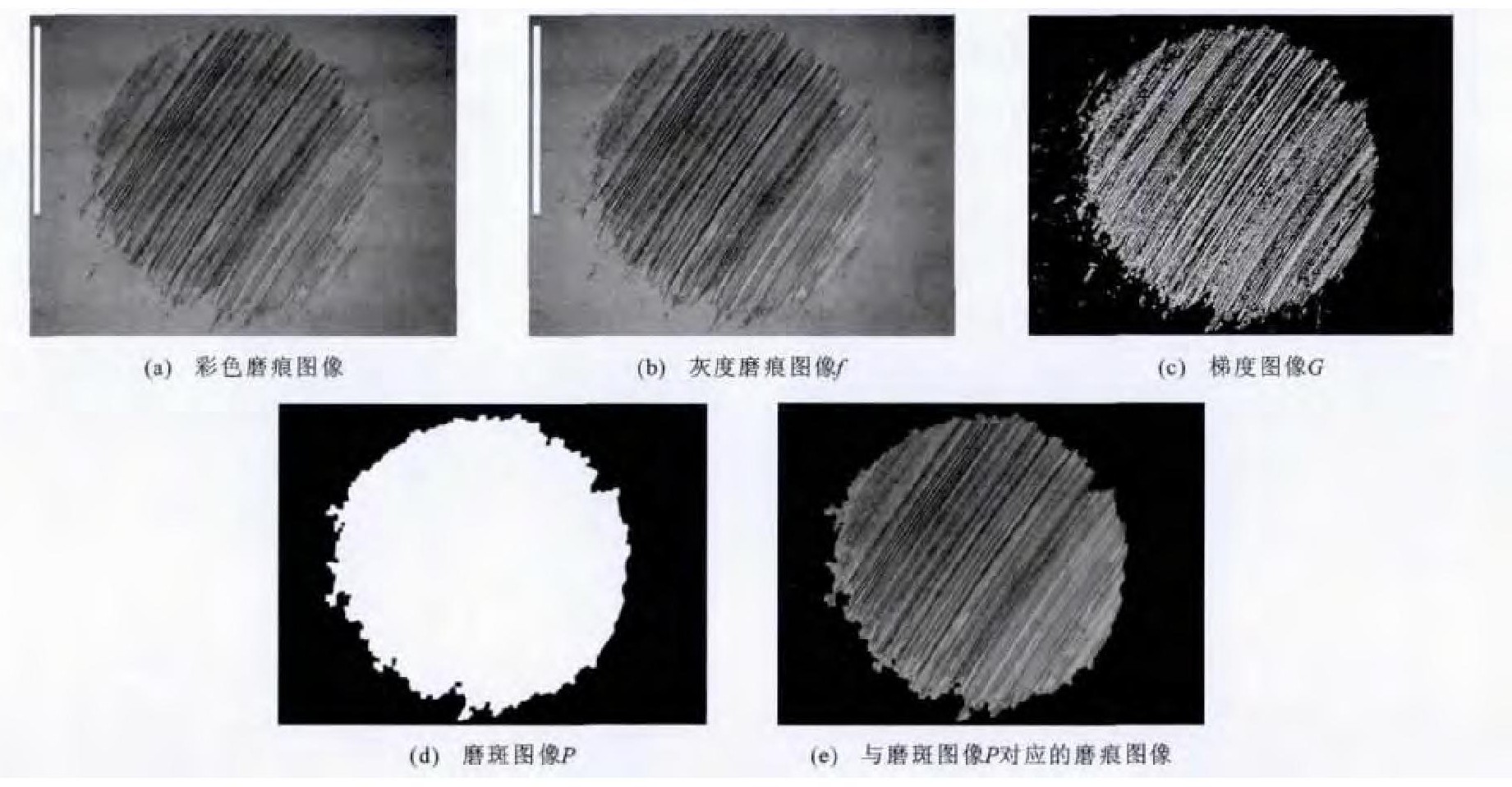
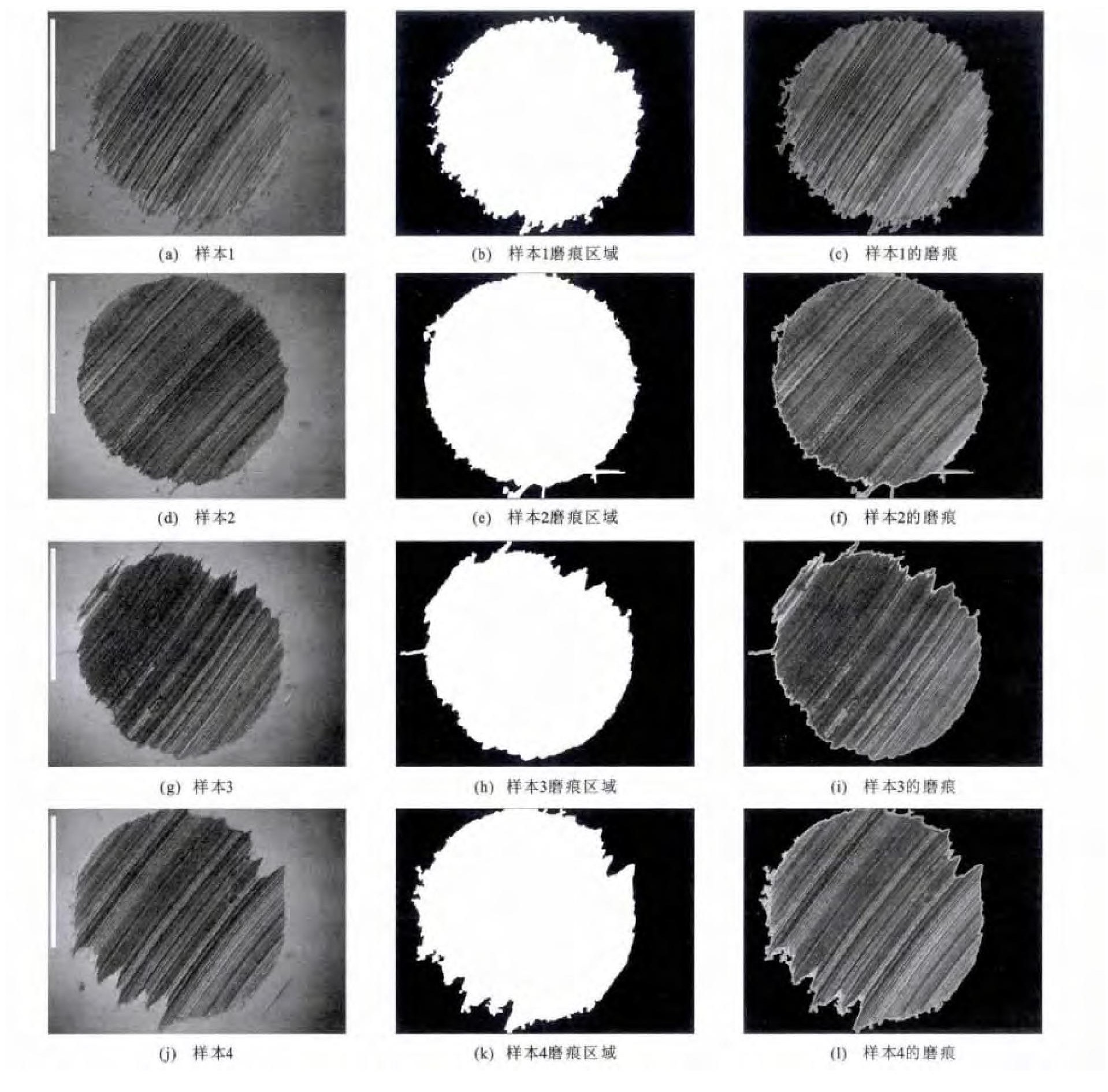
摘要:
为了测定润滑油的抗磨性能, 基于梯度信息提出了一种钢球磨痕直径测定方法。利用钢球磨痕区域具有丰富、同方向磨痕的特点, 采用四方向梯度模板提取磨痕纹理梯度图像。对磨痕纹理梯度图像进行二值化、闭运算、去零星和填补空洞等处理, 自动分割出钢球的磨痕区域。通过计算钢球磨痕区域的面积, 求取磨痕的等效直径, 根据测定的磨痕直径快速测量润滑油的抗磨性能。对磨痕检测结果进行了定性和定量试验, 并对本文方法和显微镜测定方法进行对比。试验结果表明: 利用本文方法提取的磨痕区域完整, 边缘清晰, 显微镜测定方法的平均测量误差为4.015%, 本文方法的平均测量误差为0.073%, 测量精度高。
更多>
2014, 14(3): 73-78.
摘要
(
961
)
HTML
(
467
)
PDF (443KB)
(
736
)
引用
(
)
交通运输规划与管理
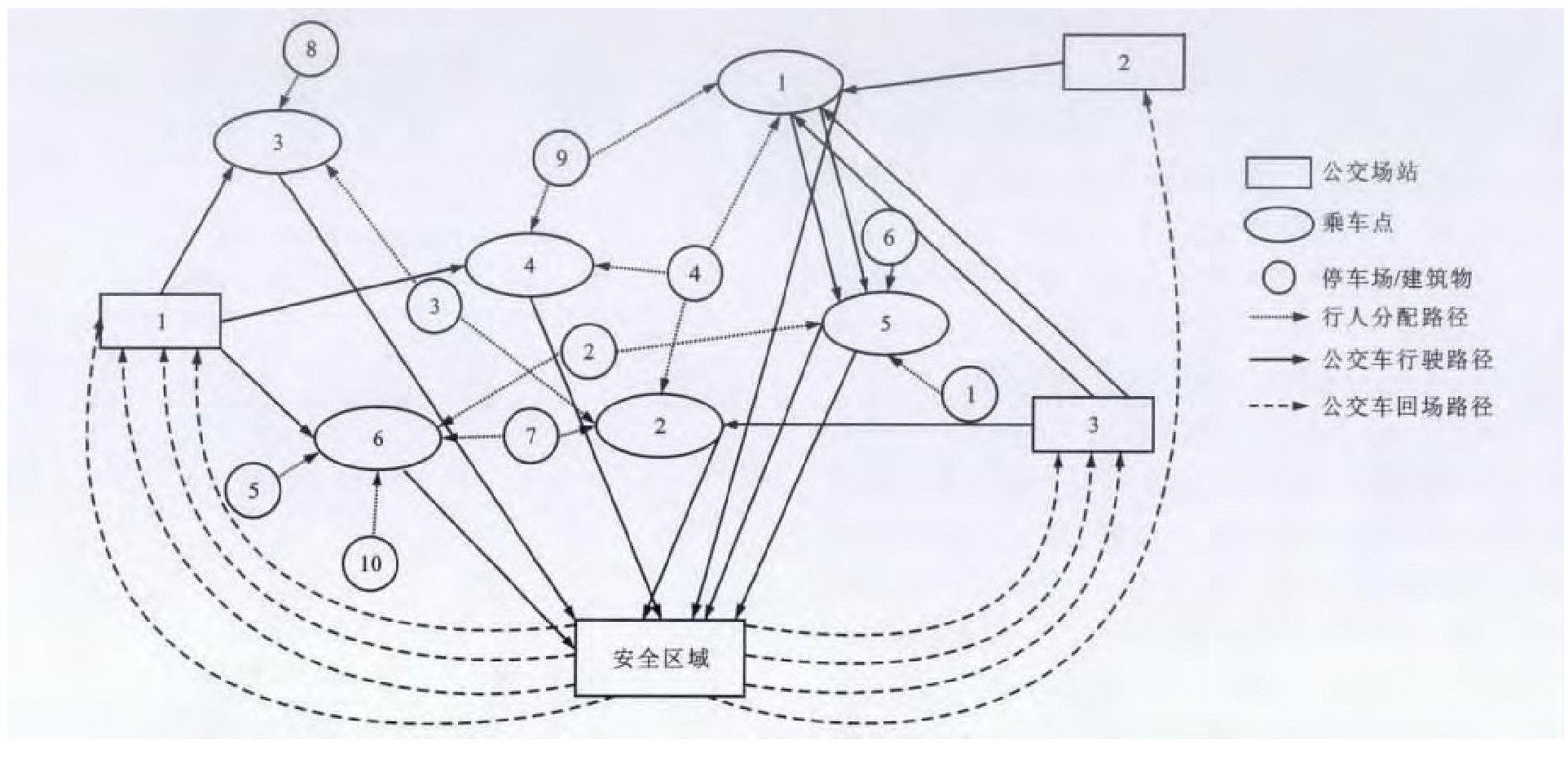
行人-公交紧急疏散集成优化模型
潘述亮
,
俞洁
,
刘玥
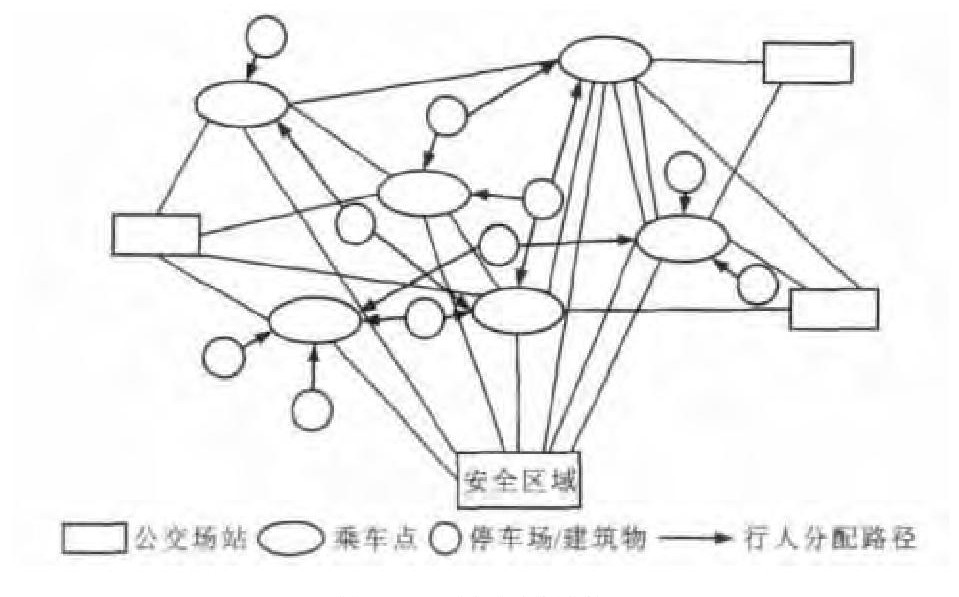
摘要:
针对大型公共场所突发事件提出了运用公共交通进行紧急疏散的集成优化模型。模型将紧急疏散问题抽象为行人交通流和公共交通网络的双层优化网络, 第1层引导撤离人员从事发地点(建筑物等) 到达指定的乘车点(公交站等), 第2层优化公交车从场站出发, 途经各乘车点, 最后运输撤离人员到达安全地点。利用基于禁忌搜索的两阶段启发式算法对模型进行求解和验证。验证结果表明: 在一个有328人需要疏散的网络中, 共使用8辆公交车完成疏散。目标函数中每一项权重的变化对模型输出结果基本没有影响, 模型具有很强的鲁棒性。对比CPLEX优化软件, 启发式算法能够在1h内求解出近似最优解, 并且近似最优解与最优解的误差小于15%。模型充分考虑了撤离人员分配与公交路径优化之间的交互影响, 实现了在紧急疏散时行人交通流与公共交通网络的组织最优。
更多>
2014, 14(3): 79-86.
摘要
(
1242
)
HTML
(
343
)
PDF (491KB)
(
833
)
引用
(
)
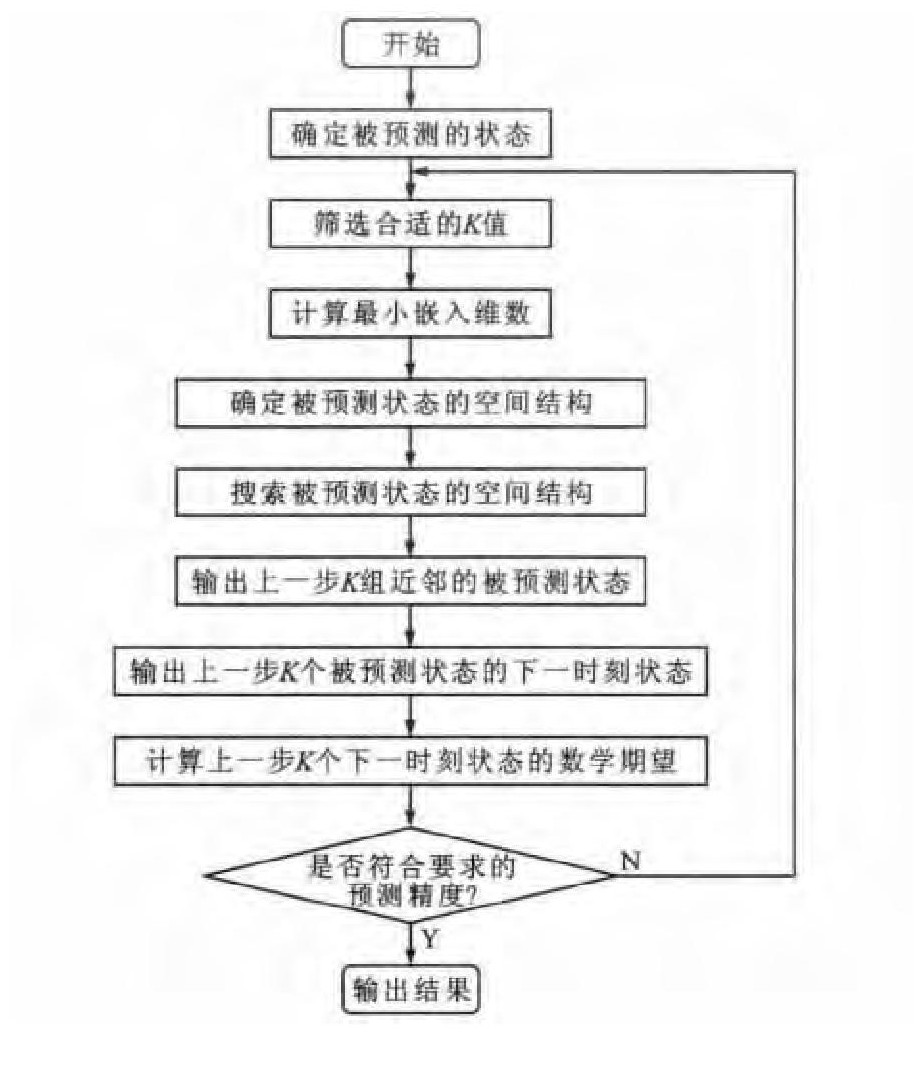
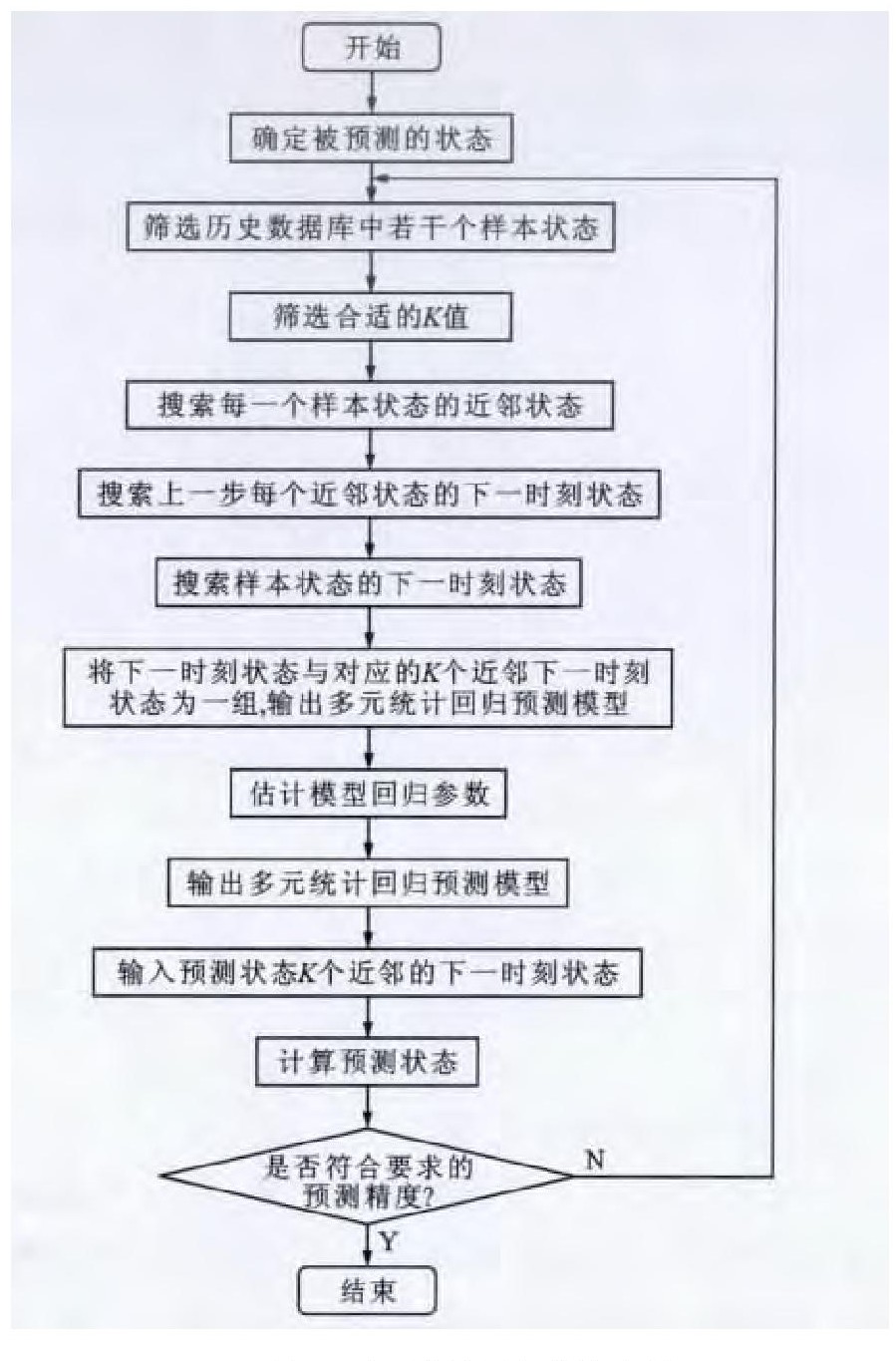
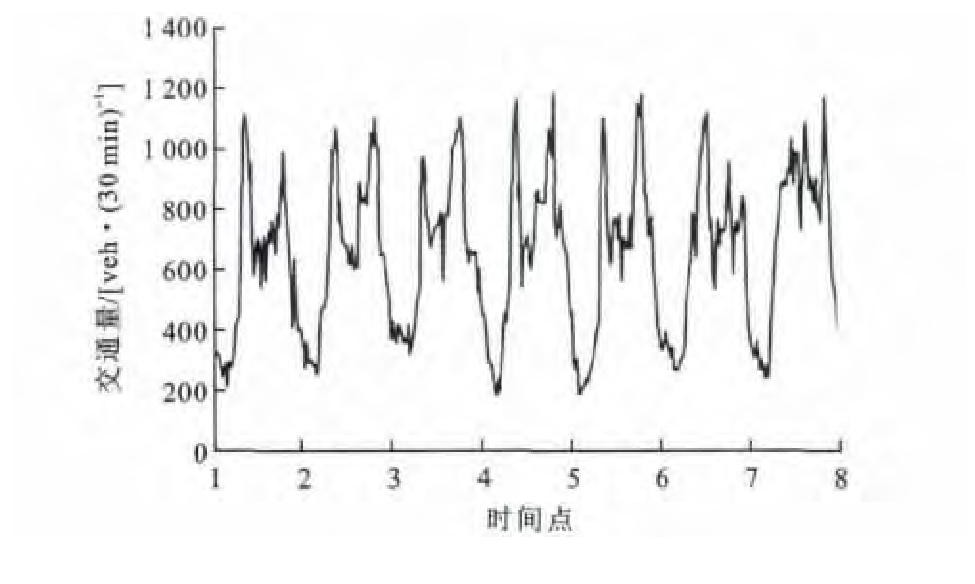
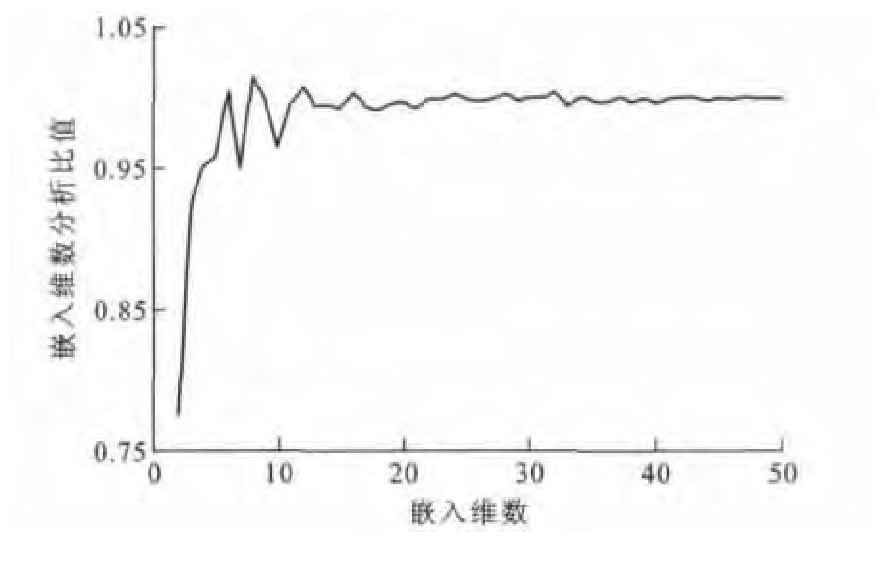
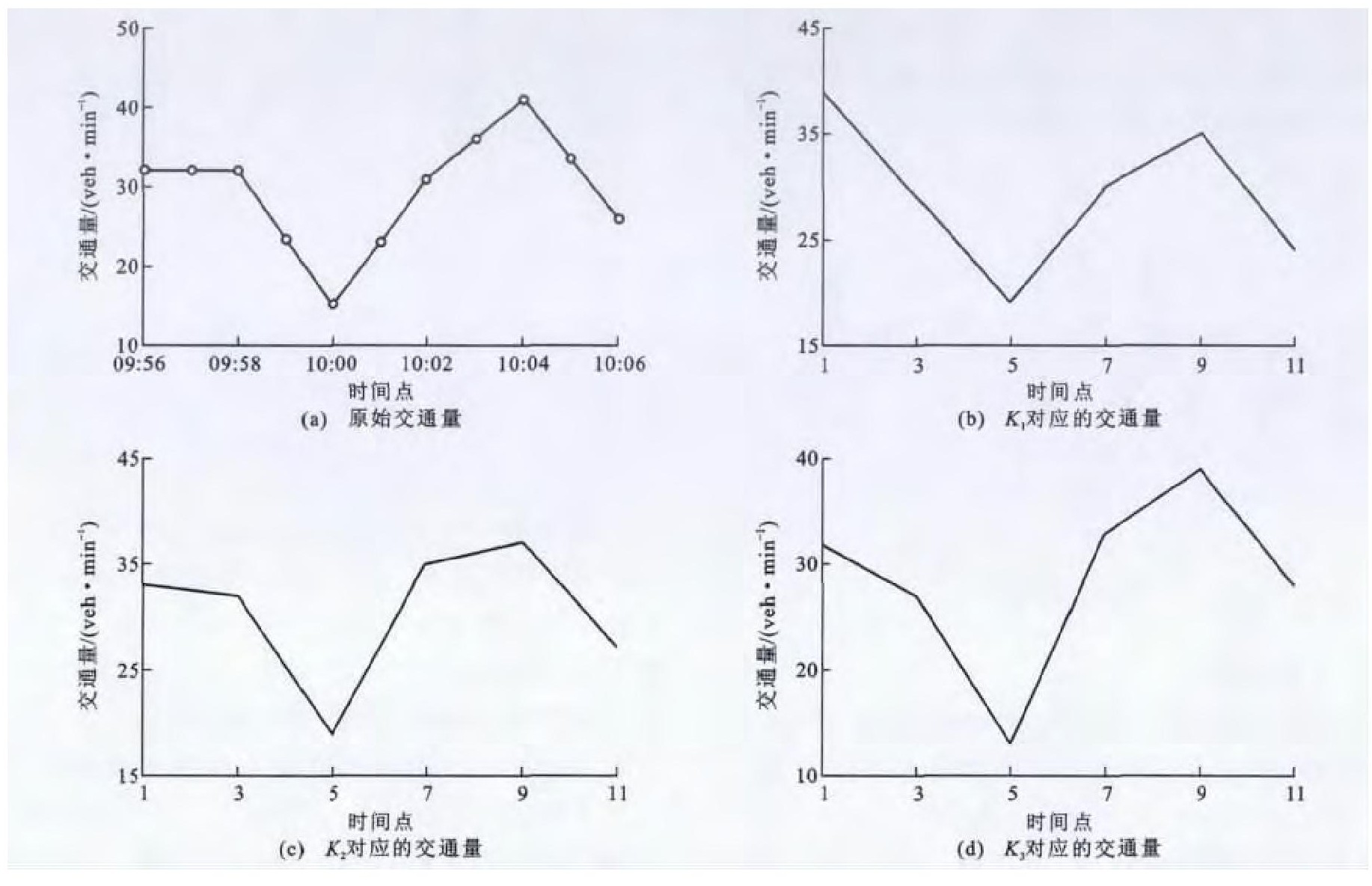
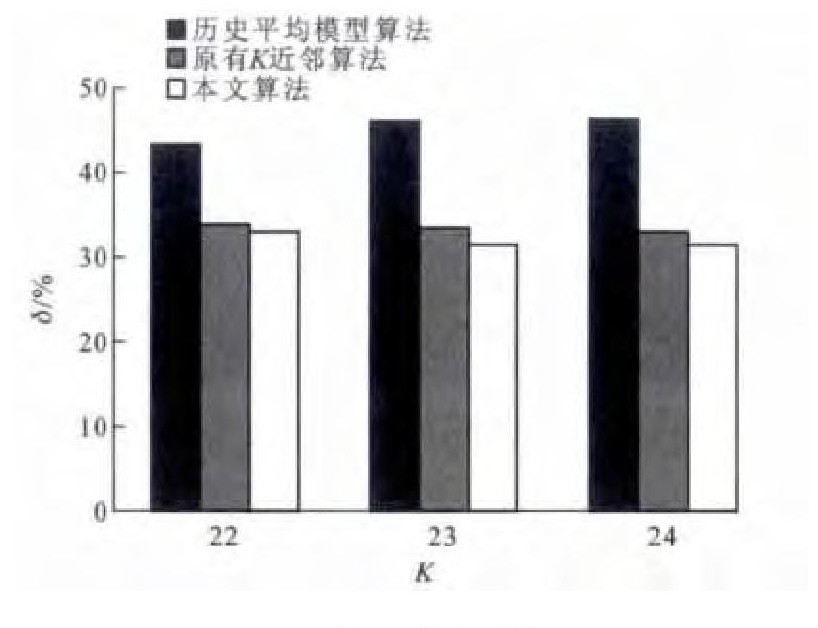
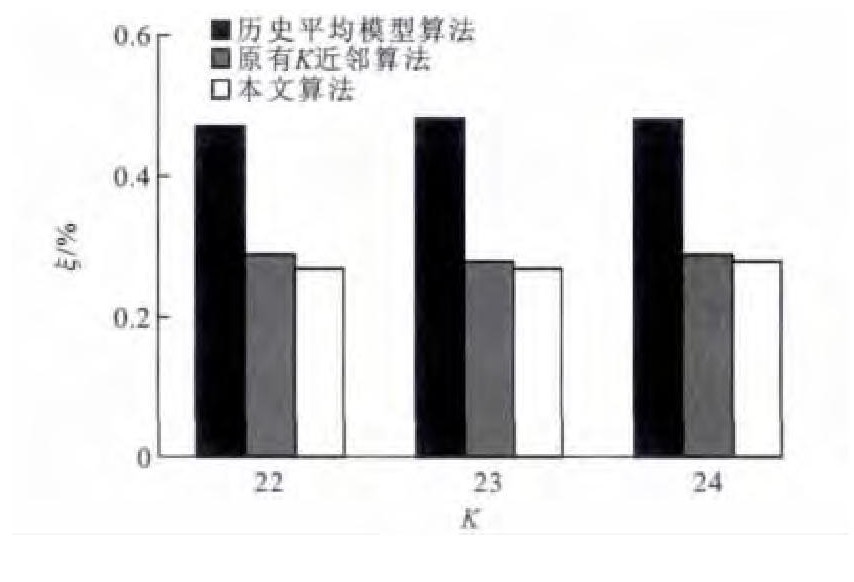
短时交通流预测的改进
K
近邻算法
谢海红
,
戴许昊
,
齐远
摘要:
分析了原有的短时交通流预测的
K
近邻算法, 用模式距离搜索方法代替原有的欧氏距离搜索方法, 引入多元统计回归模型, 建立了一种改进的短时交通流预测的
K
近邻算法, 并以北京市某路段进行实例验证。试验结果表明: 当
K
取23时, 利用改进的
K
近邻算法, 预测结果的均方误差、平均相对误差、平均绝对误差分别为31.43%、4.17%、0.27%;利用原有的
K
近邻算法, 预测结果的均方误差、平均相对误差、平均绝对误差分别为33.33%、4.40%、0.28%;利用历史平均模型, 预测结果的均方误差、平均相对误差、平均绝对误差分别为46.20%、11.40%、0.48%。可见, 改进的
K
近邻算法的预测精度明显高于其他2种方法, 在提高搜索效率的同时准确地刻画了交通流的真实情况。
更多>
2014, 14(3): 87-94.
摘要
(
2207
)
HTML
(
490
)
PDF (569KB)
(
977
)
引用
(
)
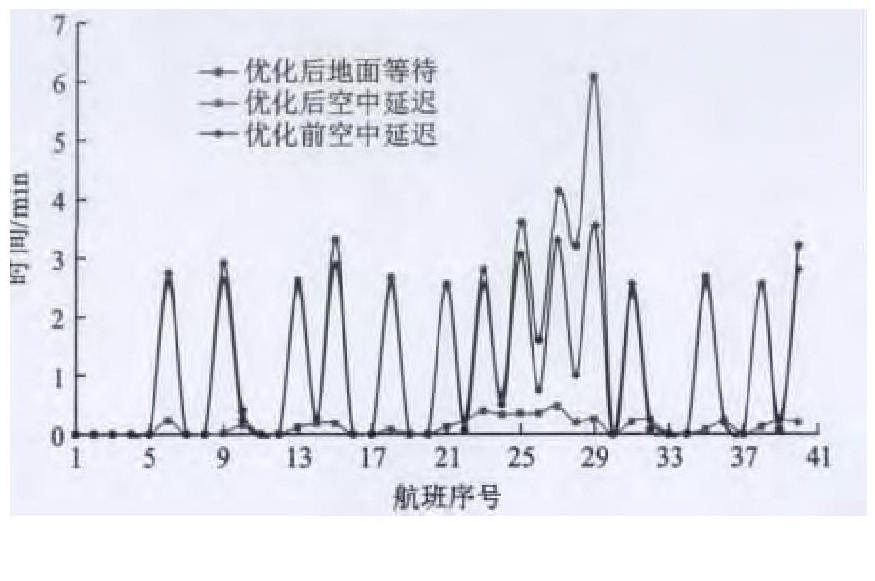
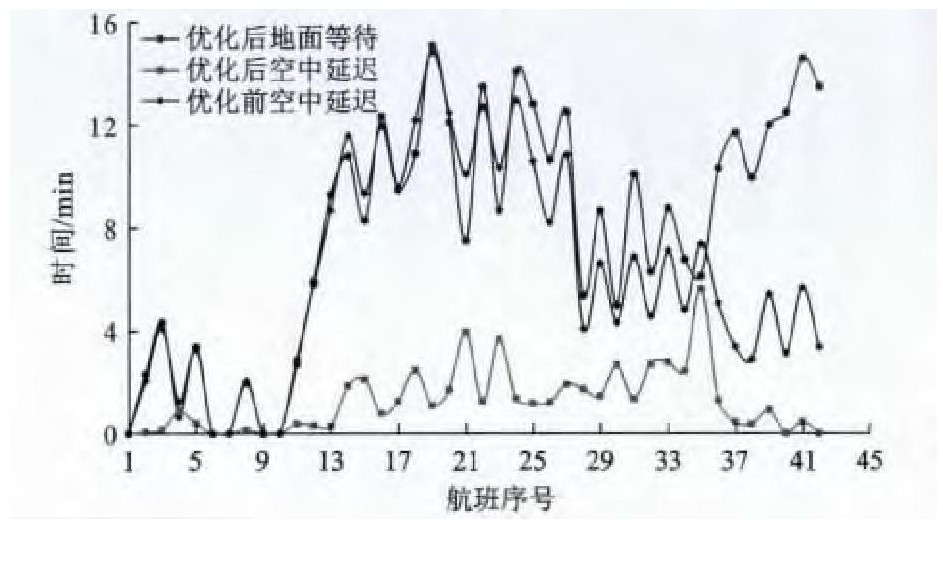
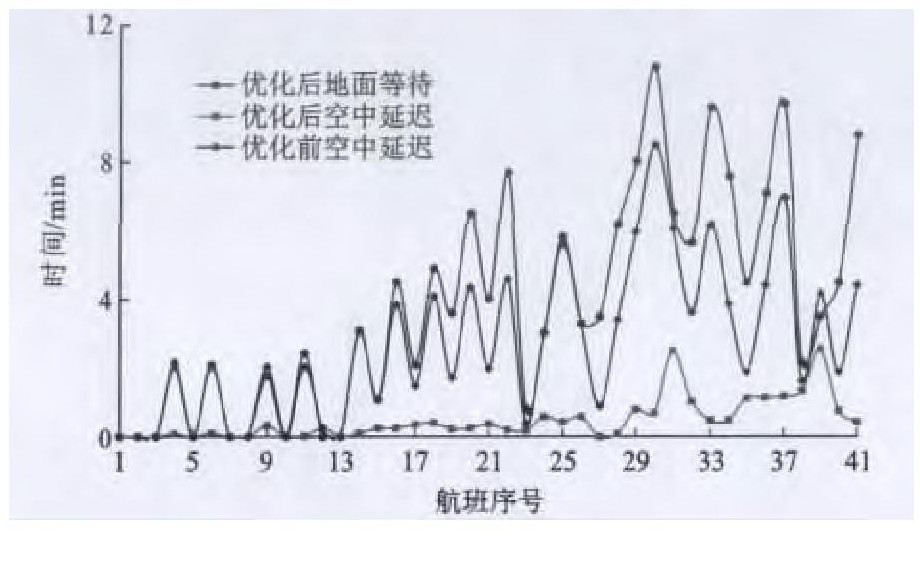
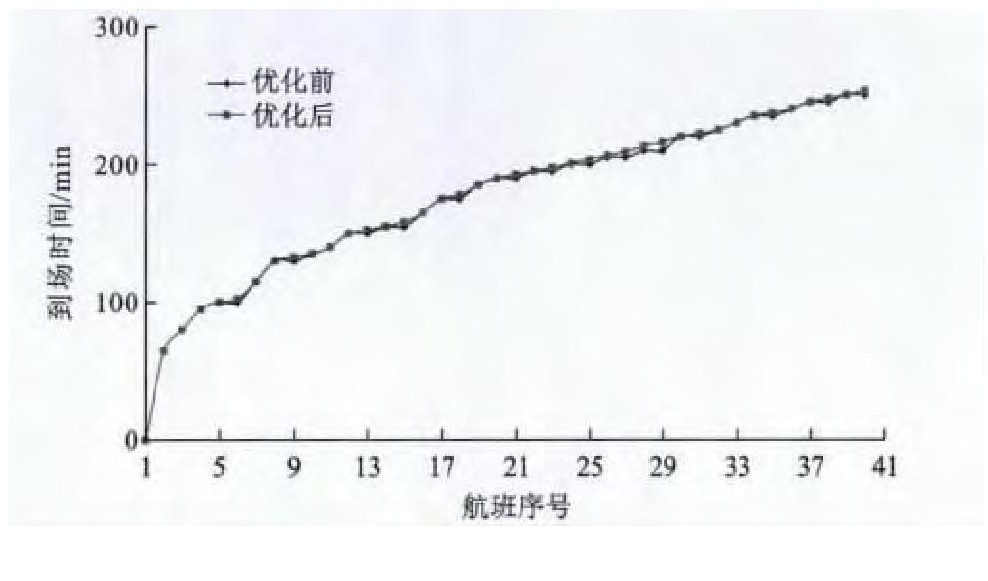
机场流量管理中地面等待问题优化模型
王来军
,
胡大伟
,
高扬
,
史忠科
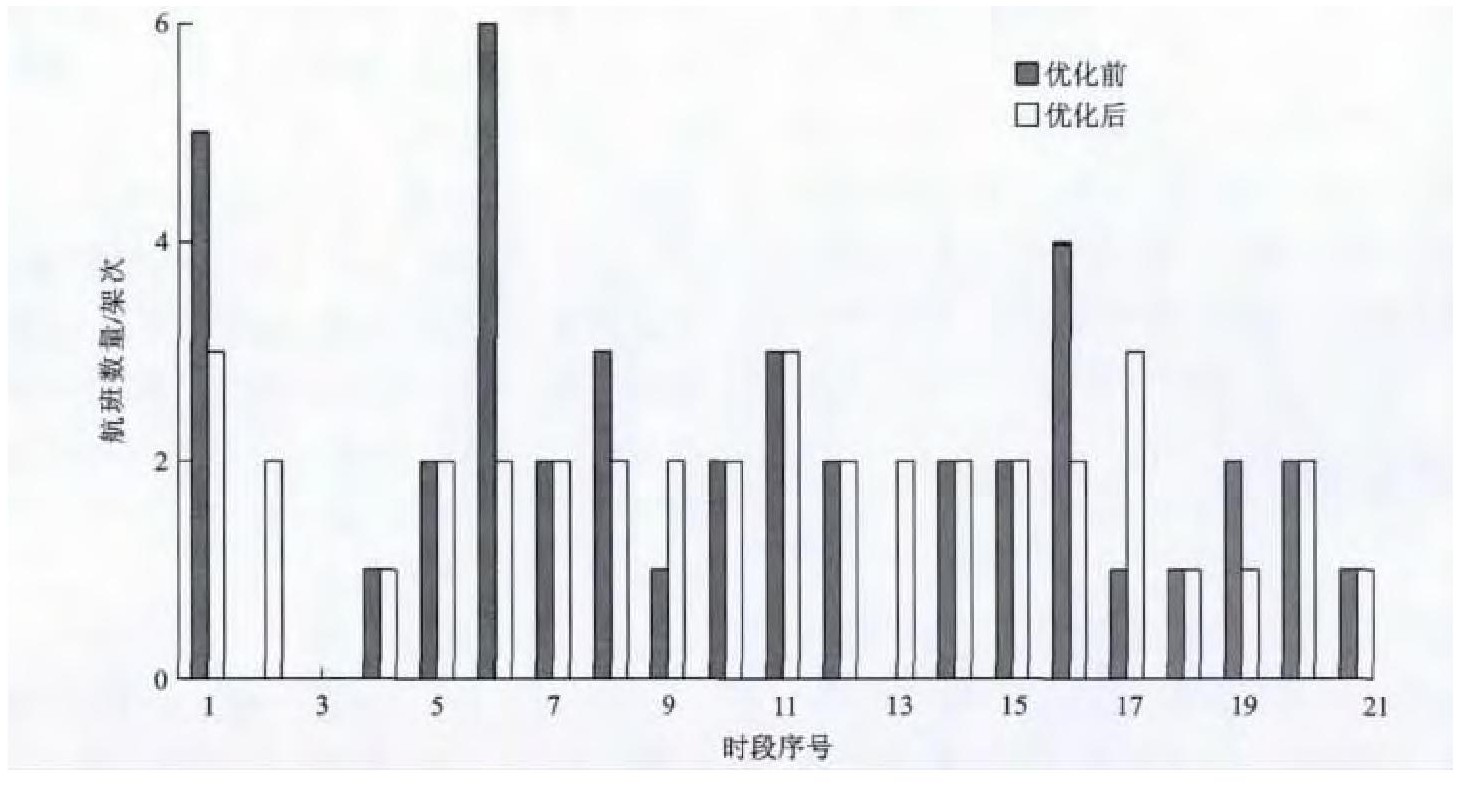
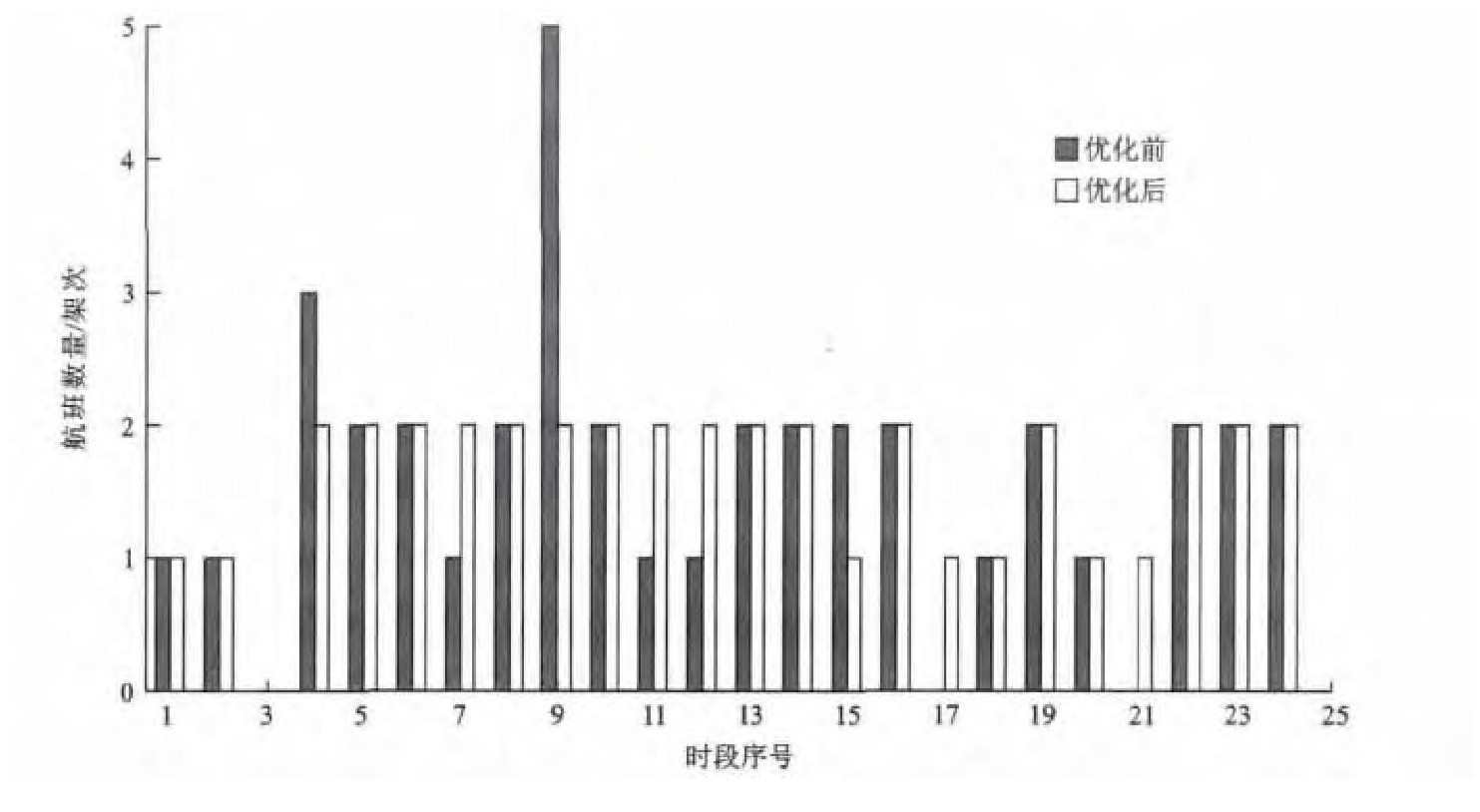
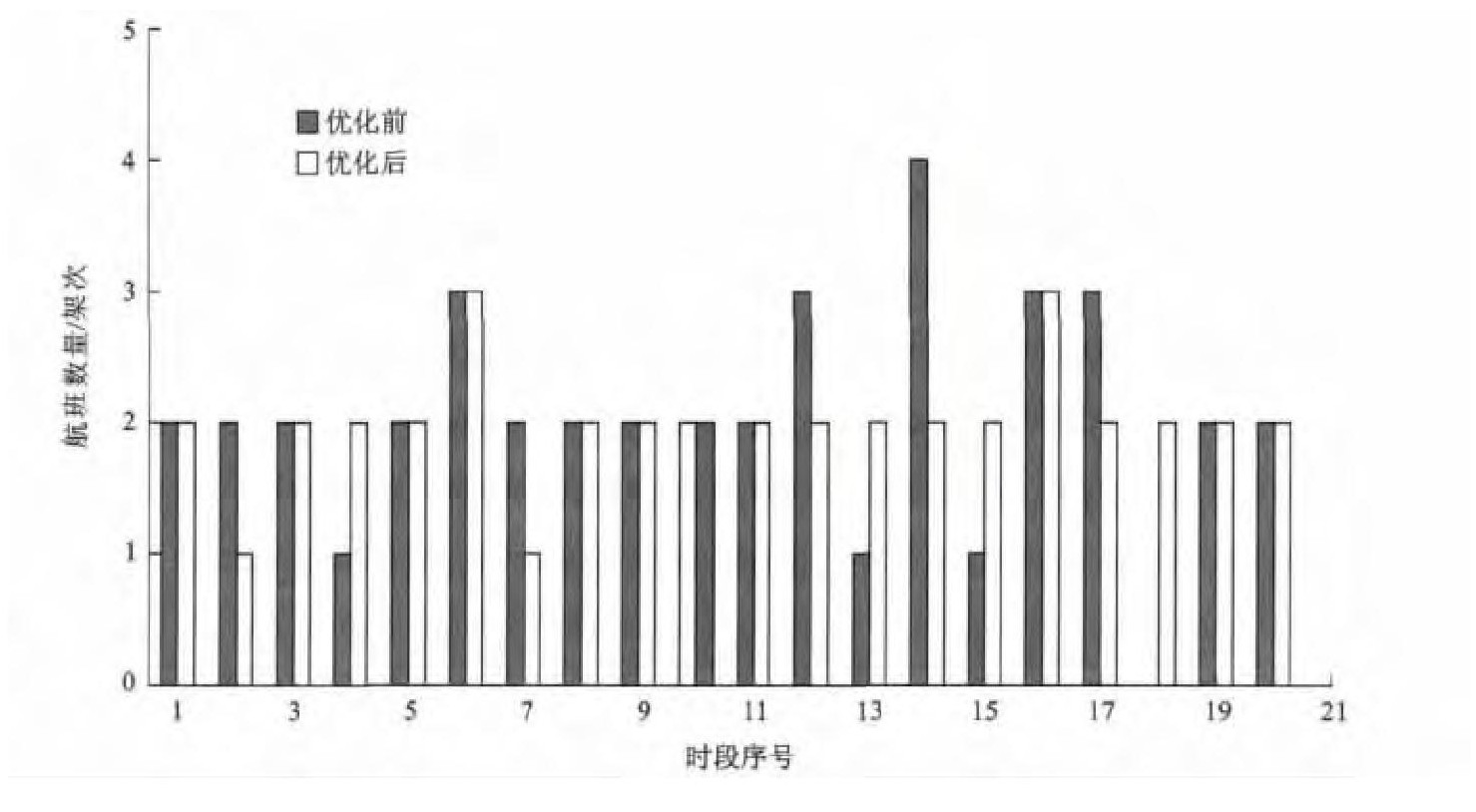
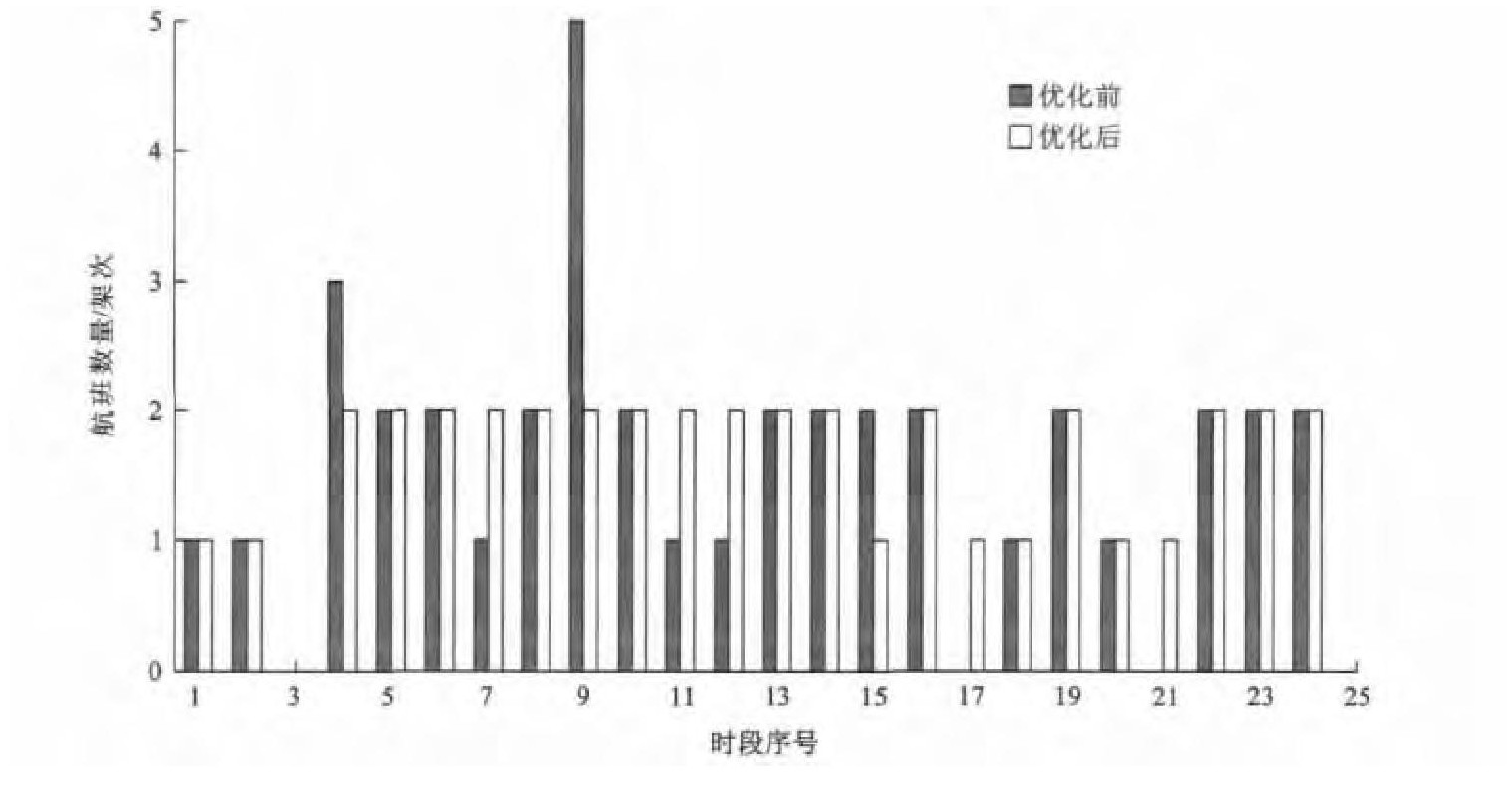
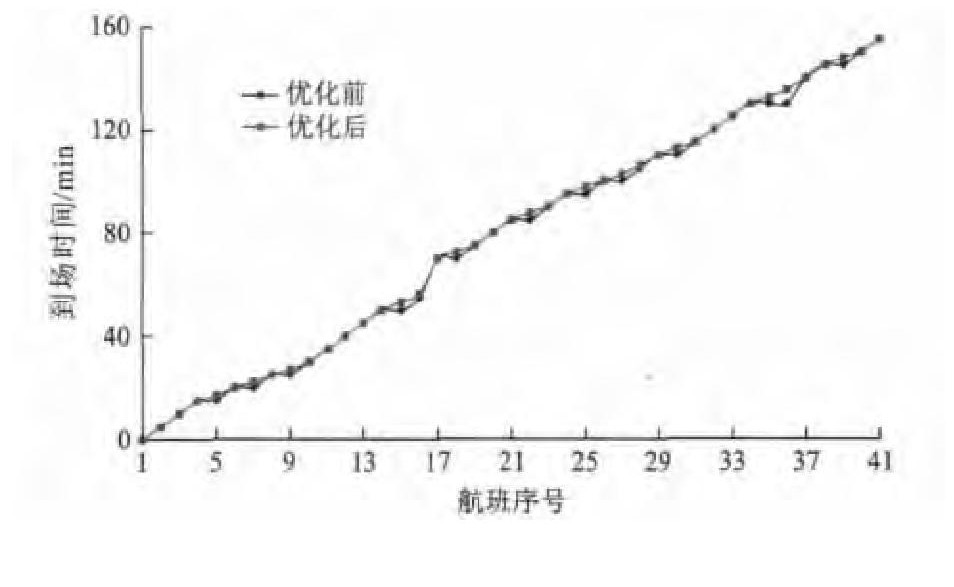
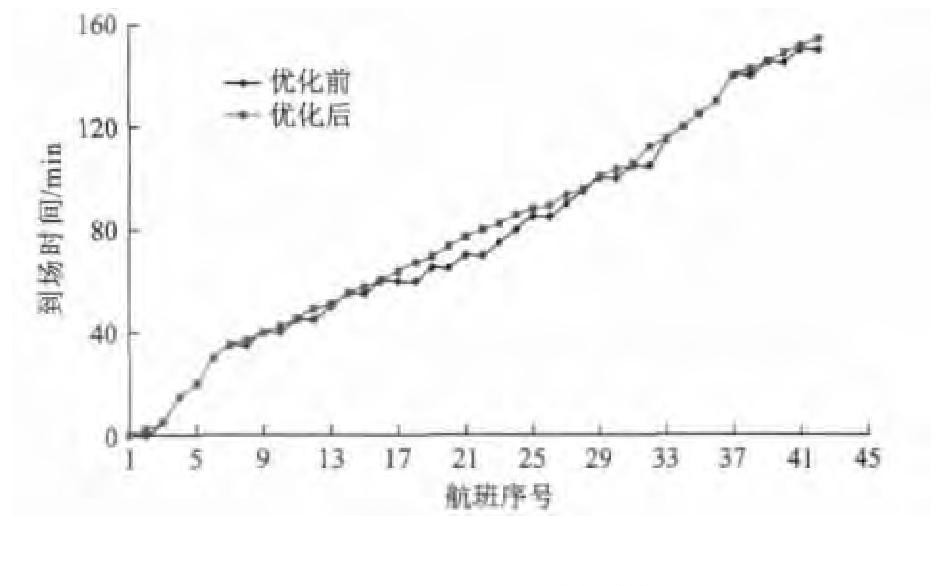
摘要:
分析了目标机场到场容量和到场需求的随机特性, 以所有航班总的延迟费用最小为目标函数, 以先到先服务原则、机场到场容量限制、地面等待和空中延迟的关系为约束条件, 建立了机场流量管理中地面等待问题的数学规划模型和事件驱动模型。运用基本的遗传算法求解模型, 得出了优化后航班的具体到场时间。计算结果表明: 单位时间的空中延迟和地面等待费用比越大, 空中延迟越容易被转化为地面等待; 当单位时间的空中延迟和地面等待费用比为3∶1时, 优化后的航班延迟总费用下降50%;当单位时间的空中延迟和地面等待费用比为1∶1时, 空中延迟和地面等待时间的比值约为1.058;当单位时间的空中延迟和地面等待费用比为6∶1时, 空中延迟只有地面等待时间的4.77%。优化后, 航班的到场分布更加均衡, 优化结果将更为精确。
更多>
2014, 14(3): 95-104.
摘要
(
1226
)
HTML
(
329
)
PDF (656KB)
(
770
)
引用
(
)
带时间窗VRP问题的多智能体进化算法
刘欣萌
,
何世伟
,
陈胜波
,
路超
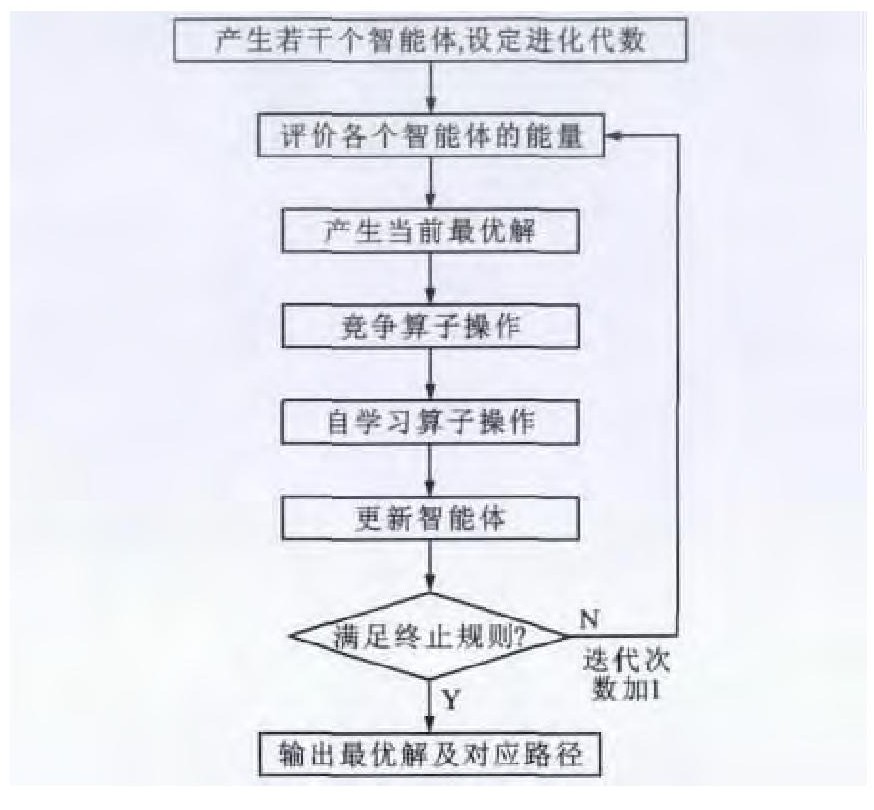
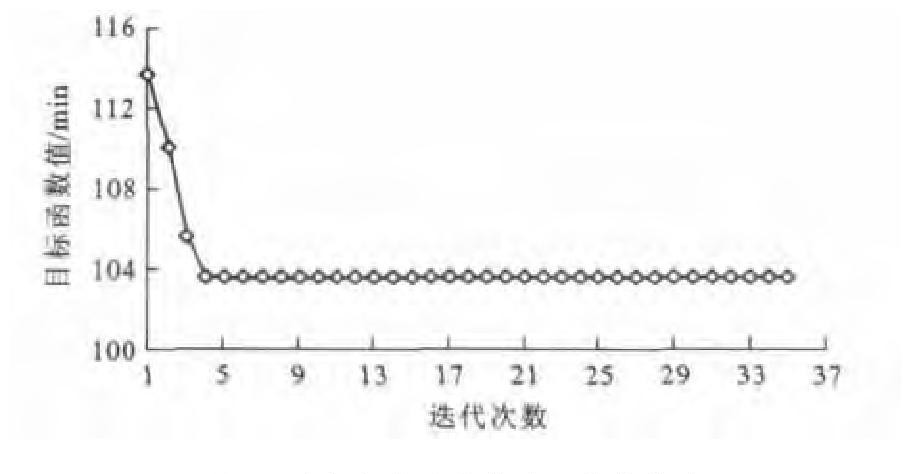
摘要:
基于实用性和合理性的角度, 研究了单个配送中心带时间窗的车辆路径问题。以行驶时间最短和客户等待时间最小为目标函数, 以服务时间窗与车辆载质量为约束条件, 建立了双目标优化模型, 采用基于整数编码的多智能体进化算法求解模型, 并将计算结果与利用遗传算法求得的结果进行对比。计算结果表明: 当客户需求点的数量为13, 需求点的服务时间为5min, 车辆最大载质量为3t, 初始智能体个数为49, 最大进化代数为200次时, 经过30次计算后, 采用遗传算法的最差值为121.8min, 最优值为110.3min, 采用提出多智能体进化算法的最差值为113.6min, 最优目标值为103.6min。可见, 采用多智能体进化算法能够获得更高质量的最优解, 而且经过多次反复试验, 最终解的变化不大。
更多>
2014, 14(3): 105-110.
摘要
(
1295
)
HTML
(
348
)
PDF (393KB)
(
1323
)
引用
(
)
交通信息工程及控制
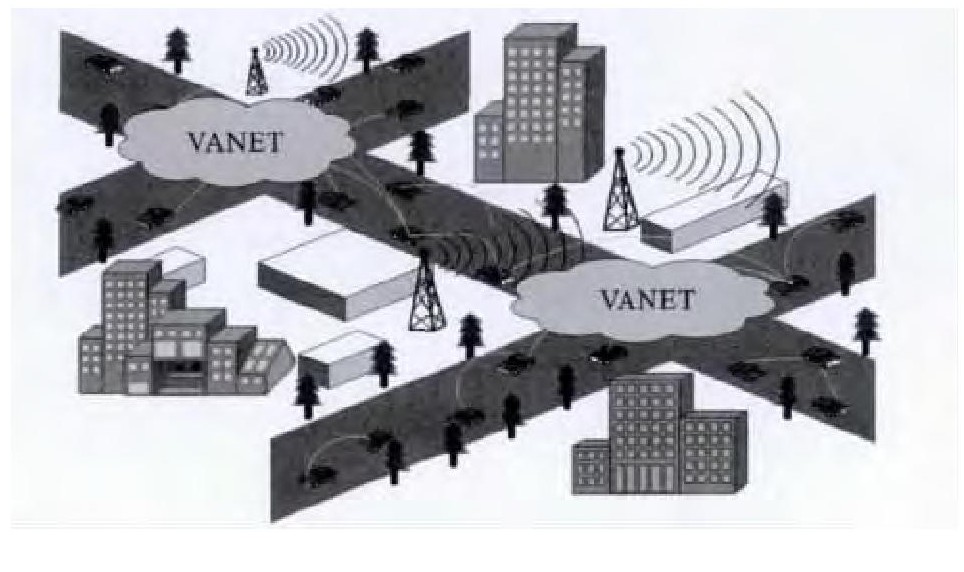
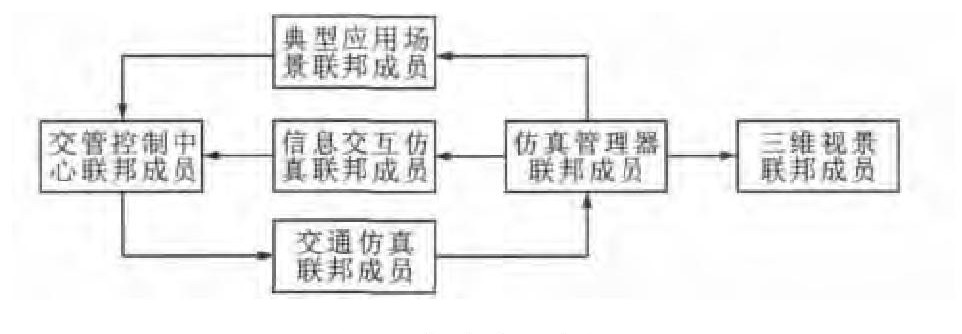
车路协同系统信息交互仿真方法
蔡伯根
,
王丛丛
,
上官伟
,
张树忠
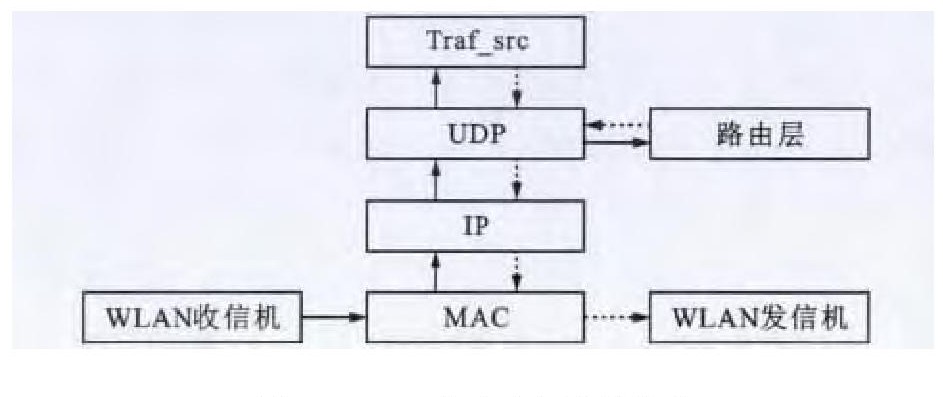
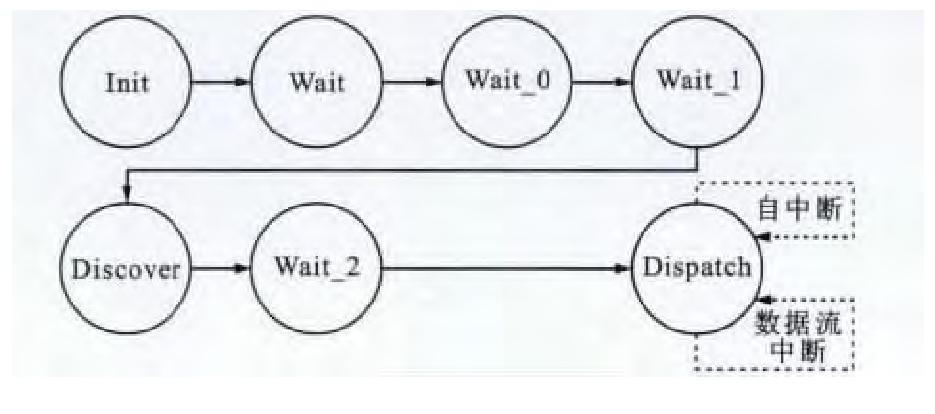
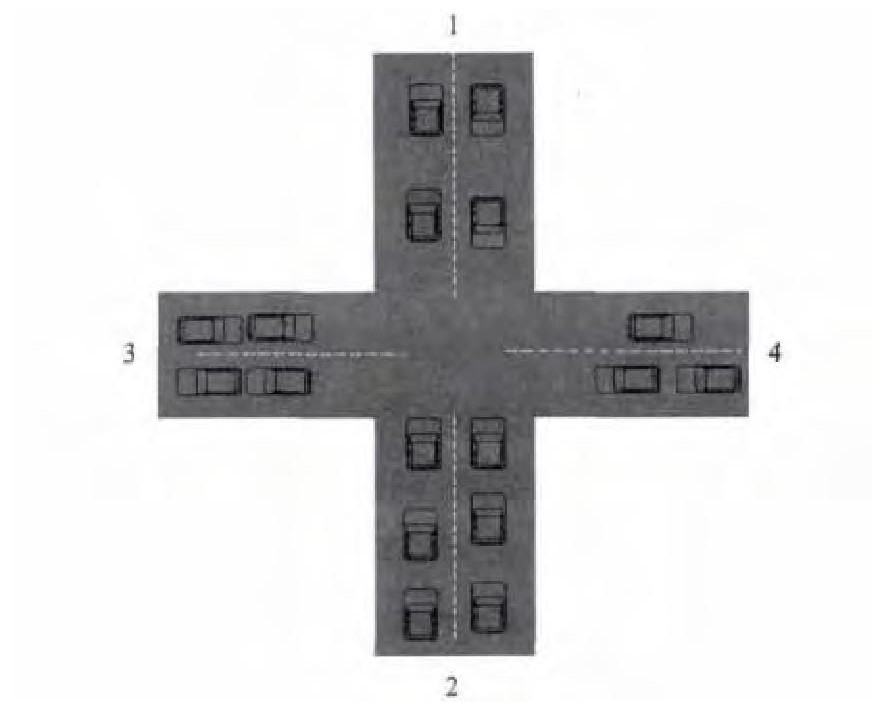
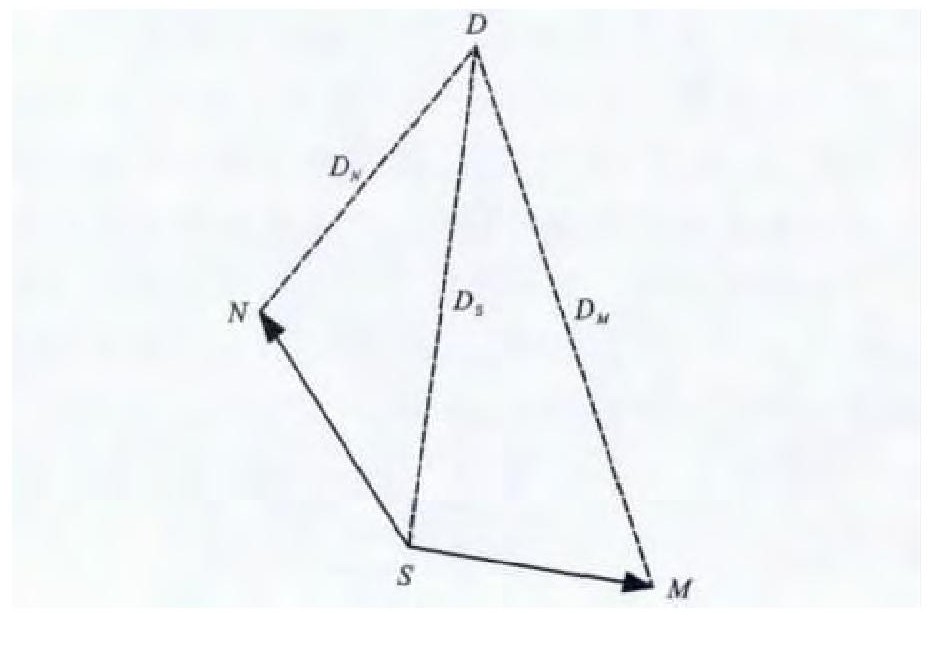
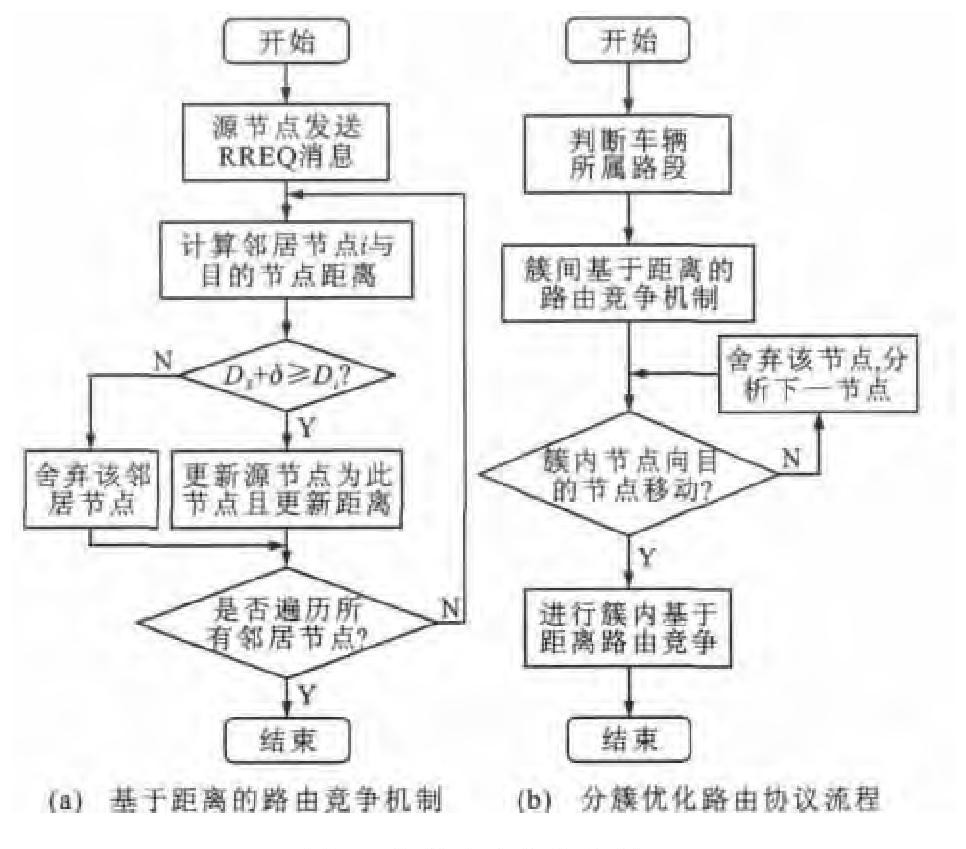
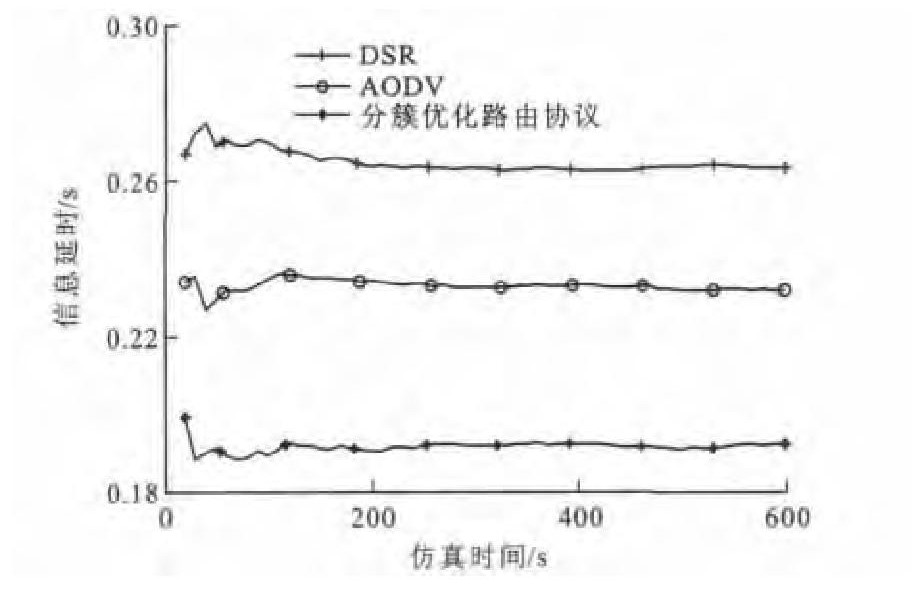
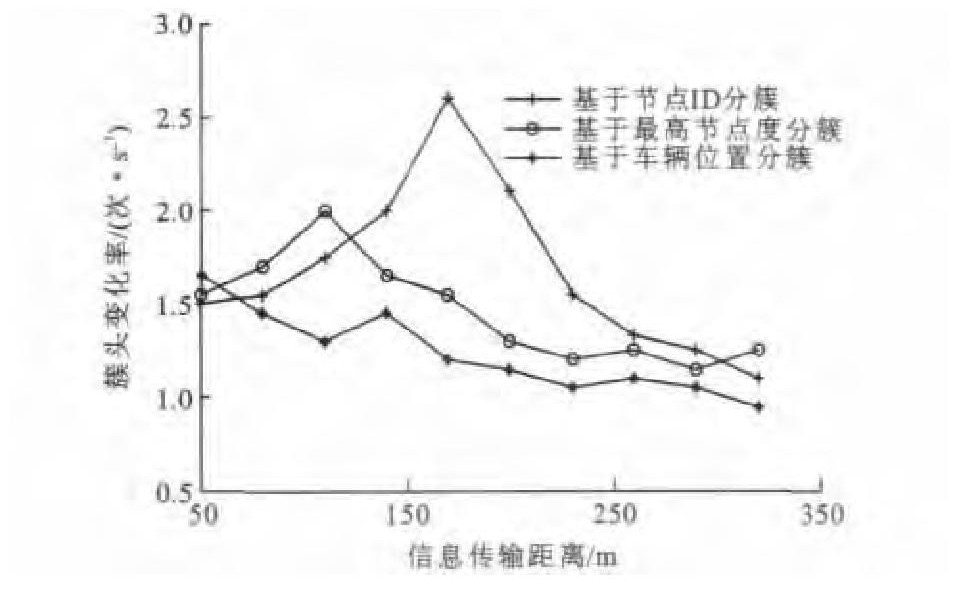
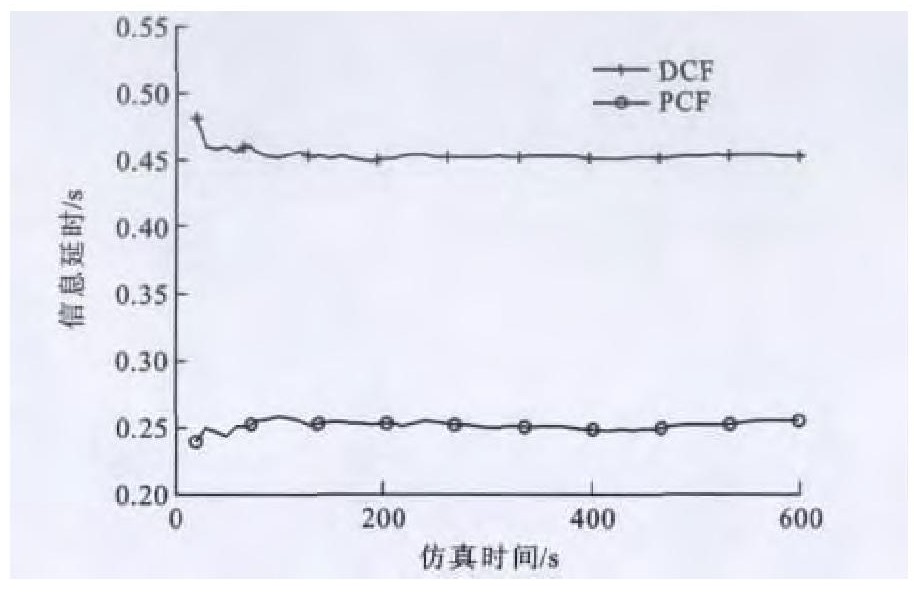
摘要:
为提高车路协同系统信息交互网络通信质量, 在规定延时范围内实现数据的准确交互, 构建了基于OPNET的车路协同系统信息交互平台。研究了多种车辆自组织网络路由协议, 应用最小距离路由竞争机制设计了基于车辆位置的分簇路由协议优化方法。基于OPNET对基于车辆位置的分簇优化路由协议和传统的路由协议进行仿真对比, 分析了不同路由协议对车路协同系统通信性能的影响。对DCF和PCF两种不同的信道接入协议进行仿真比较。仿真结果表明: 基于车辆位置的分簇路由协议中簇头变化率为1.47次·s
-1
; 在信息延时方面, 较AODV、DSR分别减少18.92%、26.90%, 较基于最高节点度和基于ID的分簇路由协议分别减少14.20%、21.54%;在网络负载方面, 较AODV、DSR分别减少20.83%、22.92%;PCF较DCF信道接入协议延时效果优越, 延时减少了约29.60%。
更多>
2014, 14(3): 111-119.
摘要
(
2408
)
HTML
(
427
)
PDF (571KB)
(
1236
)
引用
(
)
基于神经网络稳定自适应的欠驱动水面船舶编队控制方法
刘杨
,
郭晨
,
刘正江
,
范云生
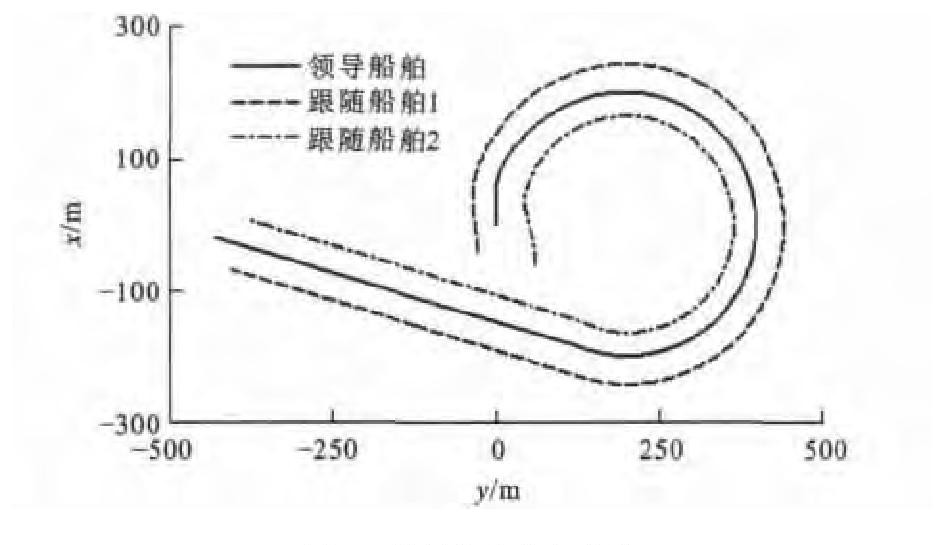
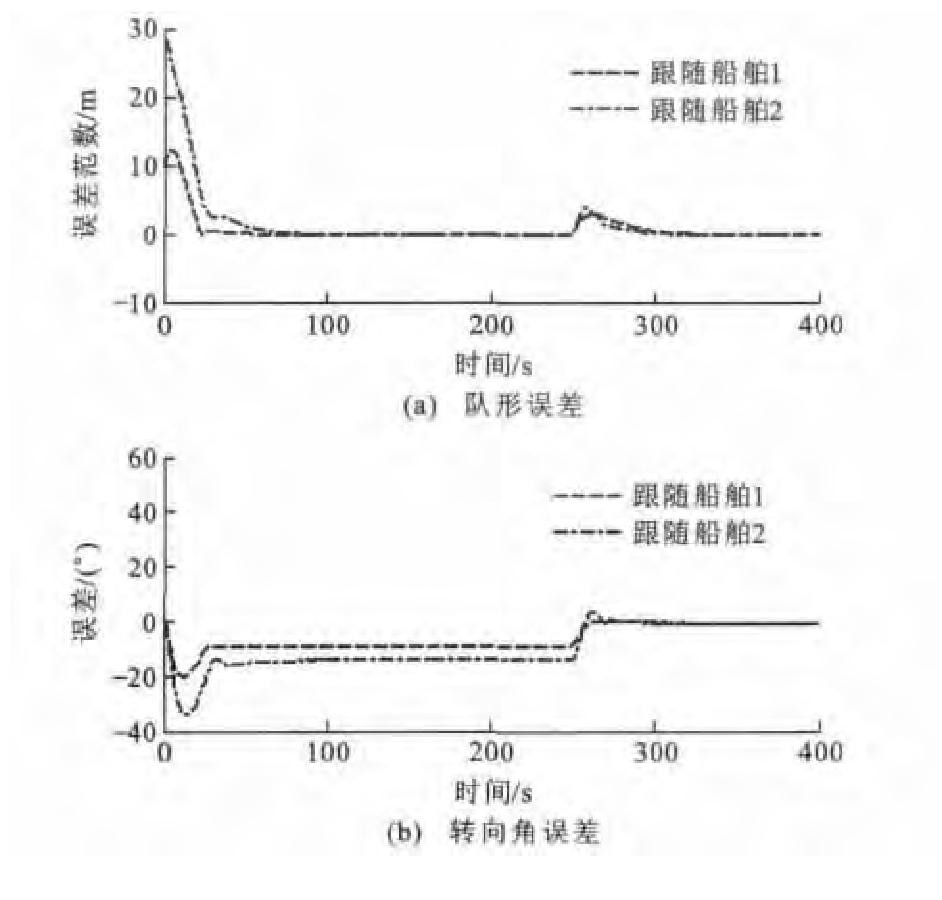
摘要:
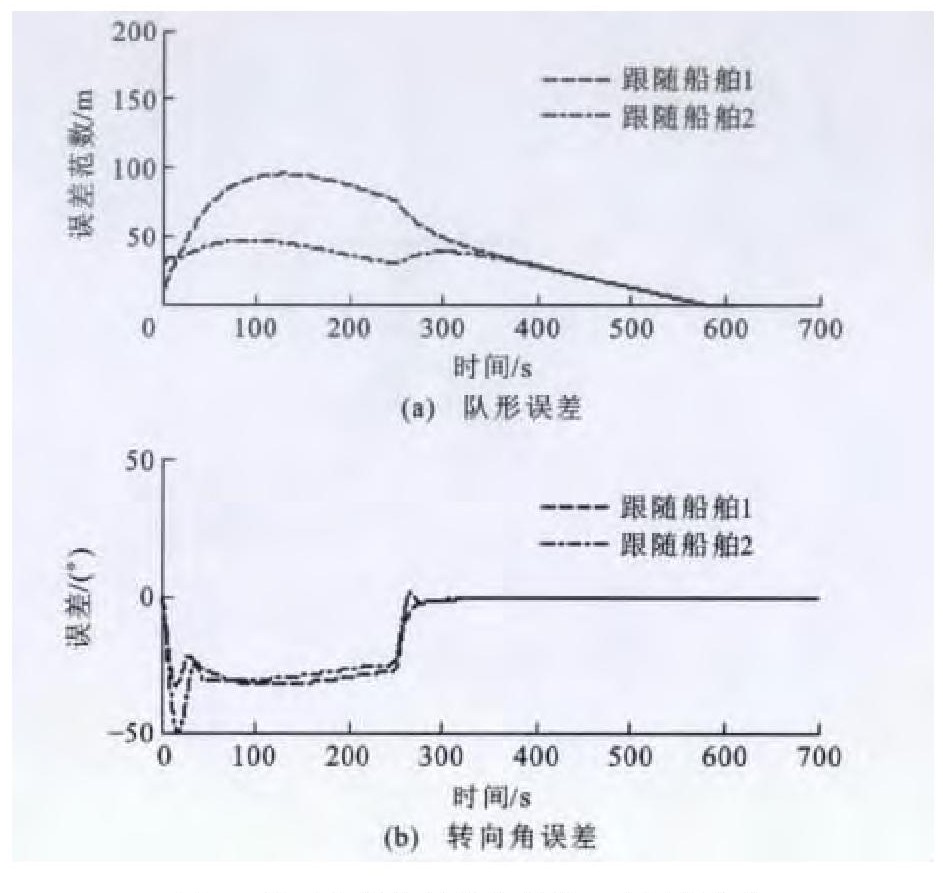
考虑具有不确定动态和外界环境干扰的欠驱动水面船舶编队控制问题, 提出一种基于领导/跟随和目标跟踪机制的神经网络稳定自适应控制方法。基于目标跟踪误差设计了运动学跟踪控制器, 推导出跟踪误差的动力学方程, 并利用自适应神经网络估计动力学方程中的不确定项, 构造了神经网络稳定自适应动力学跟踪控制器。应用Lyapunov稳定性理论和串接系统稳定性定理设计了船舶控制器, 并计算了自适应律, 在线调整神经网络权值, 保证编队控制闭环系统跟踪误差一致最终有界。以3艘船舶组成的编队为例, 对控制方法进行了仿真验证。在曲率半径为3倍船长的圆形跟踪路径上, 转向角误差小于15°, 队形跟踪误差的F-范数小于1m;在直线跟踪路径上, 转向角误差小于1°, 队形跟踪误差F-范数小于0.1m。
更多>
2014, 14(3): 120-126.
摘要
(
1063
)
HTML
(
332
)
PDF (442KB)
(
836
)
引用
(
)
文章推荐
更多>
低空无人机物流公众接受度研究综述
智能飞行汽车:驱动未来城市空中交通
无人驾驶航空器自主探测与避让技术研究综述
铁道车辆齿轮箱动力学与故障诊断研究综述
FMEA/FMECA在船舶工程中的应用综述
关键词检索
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
期刊检索
2026年
2025年
2024年
2023年
2022年
2021年
2020年
2019年
2018年
2017年
2016年
2015年
2014年
2013年
2012年
2011年
2010年
2009年
2008年
2007年
2006年
2005年
2004年
2003年
2002年
2001年
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
期刊动态
更多>
翟婉明院士莅临《交通运输工程学报》轨道交通方向青年编委会会议,指导办刊工作
《交通运输工程学报》“大宗固废在交通运输工程中的资源化利用”专刊征稿
《交通运输工程学报》“航空运输业与航空制造业融合下的前沿技术、装备与系统”专刊征稿
《交通运输工程学报》“水路交通智能技术与装备”专刊征稿
学报动态
《交通运输工程学报》“多年冻土区交通基础设施韧性提升技术” 专刊征稿启事
作者园地
更多>
关于文章中的中国地图
中图分类号
友情链接
更多>
《工程索引》(Ei Compendex)
《斯高帕斯数据库》(Scopus)
交通运输工程学报(CNKI)
长安大学学术期刊管理中心
交通运输工程学报(英文)
中国公路学报
×
Close
导出文件
文件类别
RIS(可直接使用Endnote编辑器进行编辑)
Bib(可直接使用Latex编辑器进行编辑)
Txt
引用内容
引文——仅导出文章的Citation信息
引文和摘要——导出文章的Citation信息和文章摘要信息
×
Close
引用参考文献格式