首页
期刊简介
编委会
期刊在线
网络首发
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
出版伦理
AI使用声明
同行评审及出版流程
投稿模板
版权转让协议
期刊订阅
联系我们
编辑团队
联系方式
English
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
首页
期刊简介
编委会
期刊在线
网络首发
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
出版伦理
AI使用声明
同行评审及出版流程
投稿模板
版权转让协议
期刊订阅
联系我们
编辑团队
联系方式
English
留言板
尊敬的读者、作者、审稿人, 关于本刊的投稿、审稿、编辑和出版的任何问题, 您可以本页添加留言。我们将尽快给您答复。谢谢您的支持!
姓名
邮箱
手机号码
标题
留言内容
验证码
用户中心
作者投稿
作者查询
专家审稿
编辑办公
期刊信息
(2001年创刊 月刊 )
主 管:
中华人民共和国教育部
主 办:
长安大学
编辑出版:
《交通运输工程学报》编辑部
主 编:
沙爱民
地 址:
陕西省 西安市 南二环 路中段 长安大学《交通运输工程学报》编辑部
邮 编:
710064
电 话:
029-82334388
邮 箱:
jygc@chd.edu.cn
国内发行:
中国邮政集团有限公司陕西省报刊发行局
国外发行:
中国国际图书贸易集团有限公司
标准刊号:
ISSN
1671-1637
CN
61-1369/U
CODEN
JYGXAS
学报微信视频号
学报微信公众号
重要源期刊收录
更多>
《交通运输工程学报》收录信息
《铁路运输领域高质量科技期刊分级目录》T1级
《公路运输领域高质量科技期刊分级目录》T1级
美国《工程索引》(Ei Compendex)
《文摘和引文数据库》(Scopus)
日本科学技术振兴机构(JST)中国文献数据库
邮件订阅
RSS
2015年 第15卷 第2期
栏目
道路与铁道工程
载运工具运用工程
交通运输规划与管理
交通信息工程及控制
上一期
|
下一期
选择全部
显示方式:
道路与铁道工程
基于动视觉特性的高速公路景观敏感区划分
许金良
,
王荣华
,
冯志慧
,
王子赓
摘要:
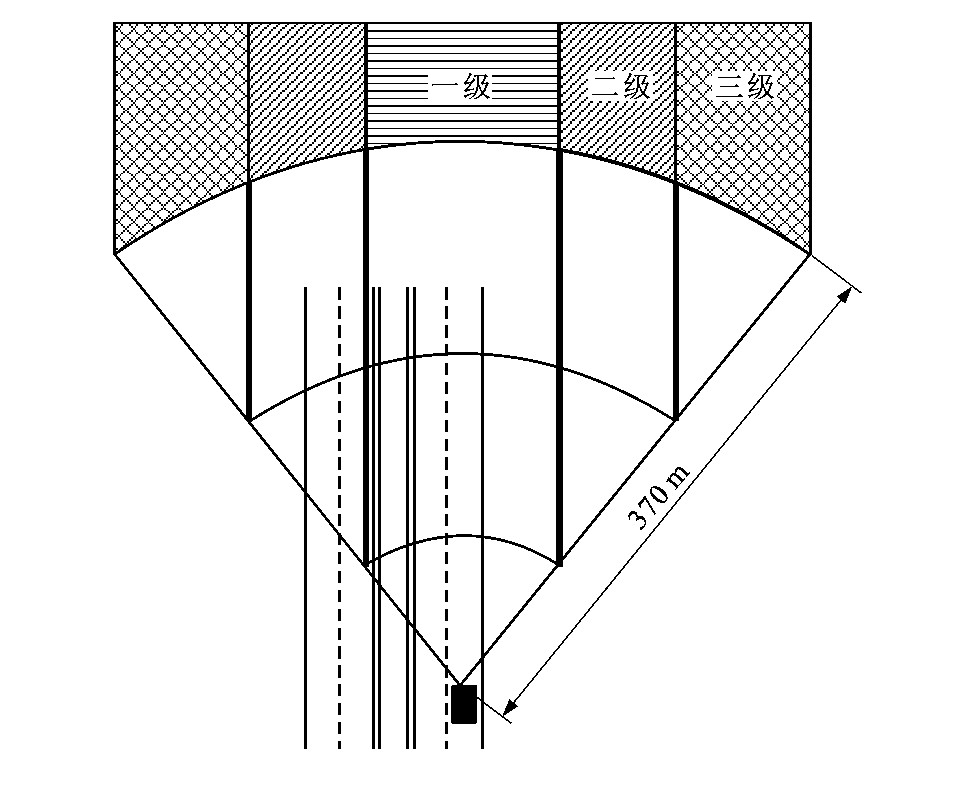
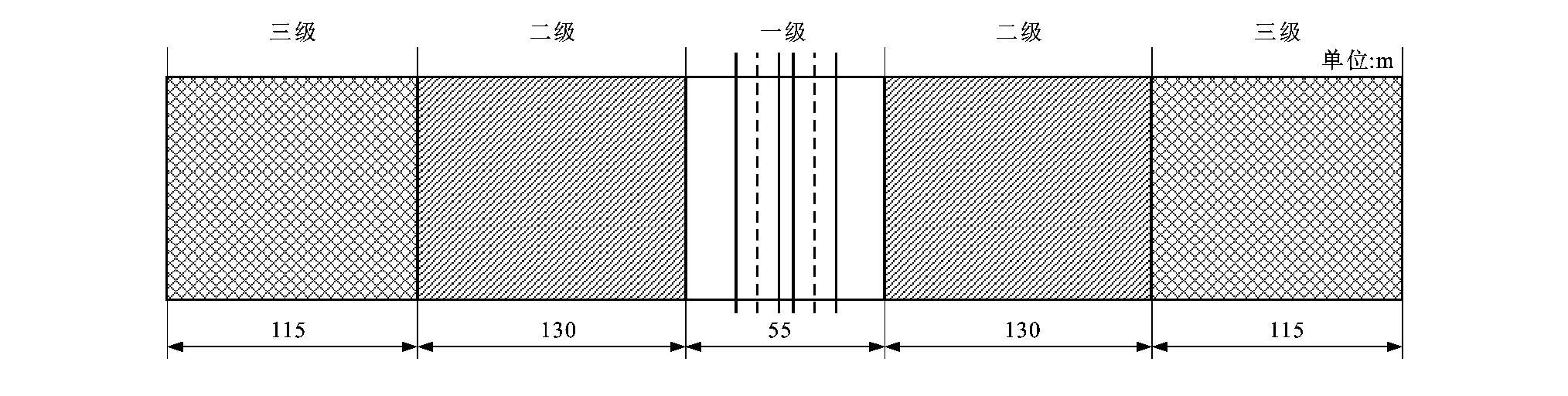
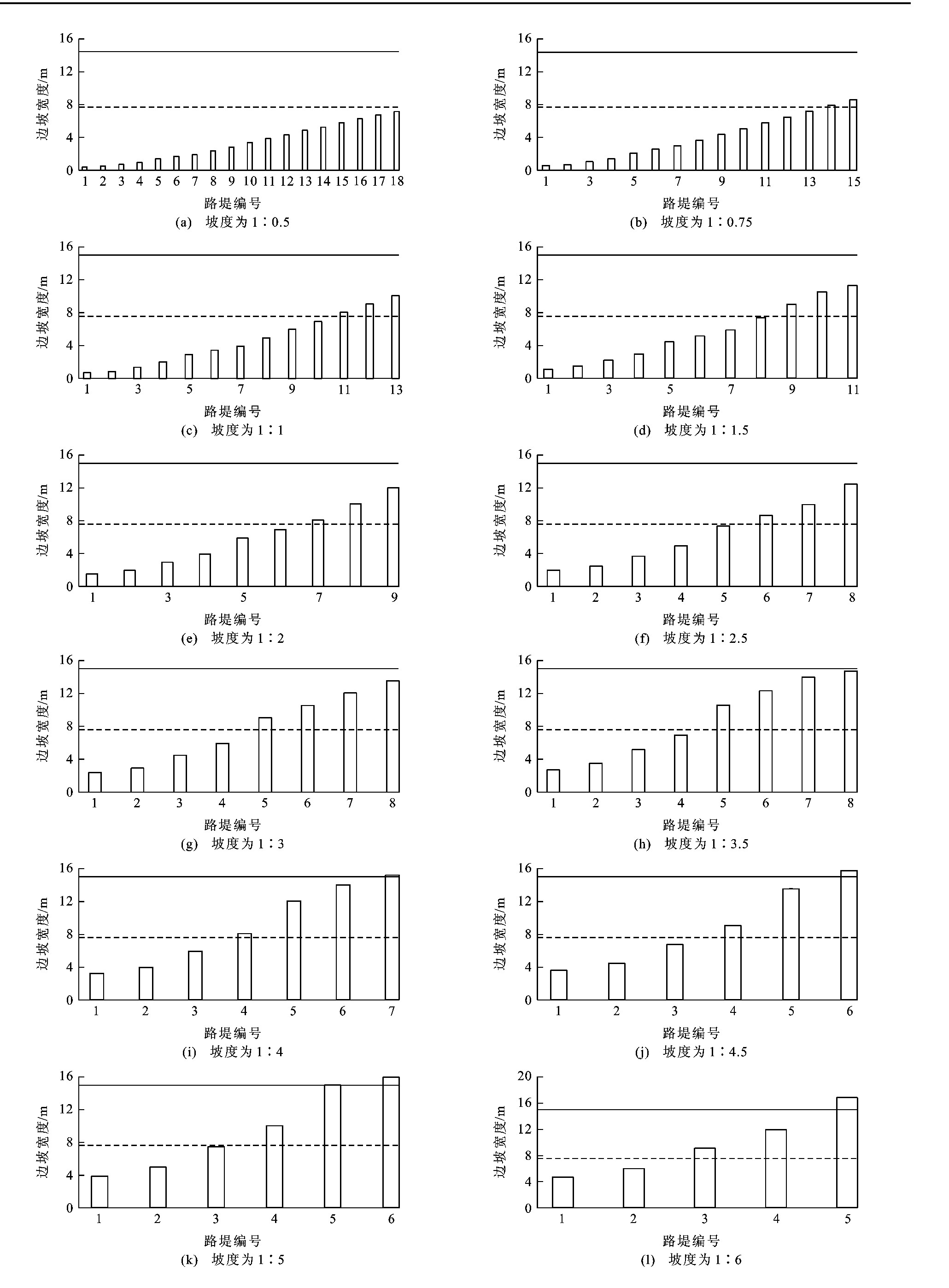
分析了驾驶人动视觉特性, 研究了驾驶人的水平视野角度、前景视图、注意力集中点与最深视野随着车速的变化规律, 构建了基于驾驶人动视觉特性的高速公路景观敏感区模型, 并推导了景观敏感区函数。运用景观敏感区模型计算了双向四车道高速公路在不同限速条件下的景观敏感区尺度, 运用景观敏感区函数获得分级结果, 并阐述了不同景观敏感区的属性与景观要素设计要点。通过对比试验, 研究了边坡宽度与一级景观敏感区尺度之间的关系。研究结果表明: 双向四车道高速公路景观敏感区尺度为545m, 一~三级敏感区尺度分别为55、260、230m, 其中一级景观敏感区属于最敏感区域; 进行边坡景观设计时可通过修正坡度的方法改变边坡宽度占高速公路景观敏感区的比重, 坡度越缓, 景观敏感性越高。
更多>
2015, 15(2): 1-9.
doi:
10.19818/j.cnki.1671-1637.2015.02.001
摘要
(
1992
)
HTML
(
412
)
PDF (828KB)
(
2479
)
引用
(
)
绿色生态型城市道路评价指标体系
李满良
,
郑晨
,
王朝辉
,
曾伟
,
狄升贯
摘要:
为科学合理地评价绿色生态型城市道路, 确立了绿色生态型城市道路概念, 从设计合理性、道路功能效果、节能减排效果、绿化效果和环境保护效果五方面提出了绿色生态型城市道路评价指标体系, 包括5个一级指标、14个二级指标与31个三级指标, 并对各指标进行了阐述, 确定了各指标的评价标准, 提出了基于Spearman等级相关系数组合赋权方法与区间逼近方法的绿色生态型城市道路评价方法, 并对中新天津生态城绿色生态型道路进行了评价。评价结果表明: 中新天津生态城绿色生态型道路21个三级指标评定结果为优, 其余10个指标评定结果为良; 12个二级指标评定结果为优, 其余2个指标评定结果为良; 一级指标中设计合理性与环境保护效果评定结果为良, 其余指标评定结果为优; 绿色生态型城市道路评价指标集合到评价等级优的距离为3.82, 为评价指标集合到各评价等级的最小距离, 中新天津生态城绿色生态型道路评价结果为优, 与实际相符, 因此, 绿色生态型城市道路评价指标体系与评价方法合理、可靠。
更多>
2015, 15(2): 10-21.
doi:
10.19818/j.cnki.1671-1637.2015.02.002
摘要
(
2118
)
HTML
(
471
)
PDF (479KB)
(
1297
)
引用
(
)
素混凝土柱极限承载力计算方法
林上顺
,
陈宝春
摘要:
开展了19根素混凝土柱极限承载力试验, 提出了素混凝土柱长细比和偏心率的合理取值范围, 采用非线性有限元方法对试验柱承载力进行计算, 通过理论分析和试验数据回归, 提出了素混凝土柱极限承载力计算方法。计算结果表明: 当试验柱长细比大于15与偏心率为0.3时, 素混凝土柱的破坏模式为截面受拉破坏, 未能充分发挥混凝土以受压为主的材料性能; 当试验柱长细比不大于15与偏心率不大于0.3时, 其破坏模式为截面受压破坏。承载力有限元算法计算值与试验值的平均比值为0.995, 方差为0.001 8, 计算值与试验值吻合较好, 有限元算法可用于素混凝土柱的参数分析。提出的素混凝土柱极限承载力计算方法考虑了长细比和偏心率对承载力影响的耦合作用, 其计算值与有限元算法计算值的平均比值为0.976, 方差为0.003, 表明提出的算法具有较高的精度, 且偏安全。
更多>
2015, 15(2): 22-31.
doi:
10.19818/j.cnki.1671-1637.2015.02.003
摘要
(
2178
)
HTML
(
579
)
PDF (1696KB)
(
2421
)
引用
(
)
表层嵌入混合FRP筋的连续梁弯曲性能与影响因素
王兴国
,
朱坤佳
,
郑宇宙
,
郑丹丹
,
小室雅人
摘要:
通过4根表层内嵌入不同FRP筋加固连续梁试件的静载试验, 研究了试验梁的弯曲性能, 借助通用有限元分析软件分析了影响试验梁承载力的混凝土强度、初始荷载、FRP筋弹性模量与配纤率等因素。分析结果表明: FRP筋与混凝土之间未发生剥离破坏, 加固效果显著; 与未加固梁相比, 加固梁屈服荷载与极限荷载提高幅度分别可达31%、56%;随着混凝土强度、FRP筋弹性模量与含纤率的提高, 加固梁屈服荷载与极限荷载提高幅度分别可达38%、17%;随着初始荷载的增大, 加固梁屈服荷载与极限荷载降低幅度分别可达6%和24%;试验梁屈服荷载模拟值与试验值的平均比值为0.969, 极限荷载模拟值与试验值的平均比值为0.962, 钢筋屈服时跨中挠度模拟值与试验值的平均比值为1.104, 梁破坏时跨中挠度模拟值与试验值的平均比值为1.024, 荷载-挠度模拟曲线与试验曲线走势基本一致, 这说明有限元分析结果与试验结果吻合较好, 有限元法可以较好模拟试验梁的力学性能。
更多>
2015, 15(2): 32-41.
doi:
10.19818/j.cnki.1671-1637.2015.02.004
摘要
(
1494
)
HTML
(
382
)
PDF (570KB)
(
999
)
引用
(
)
载运工具运用工程
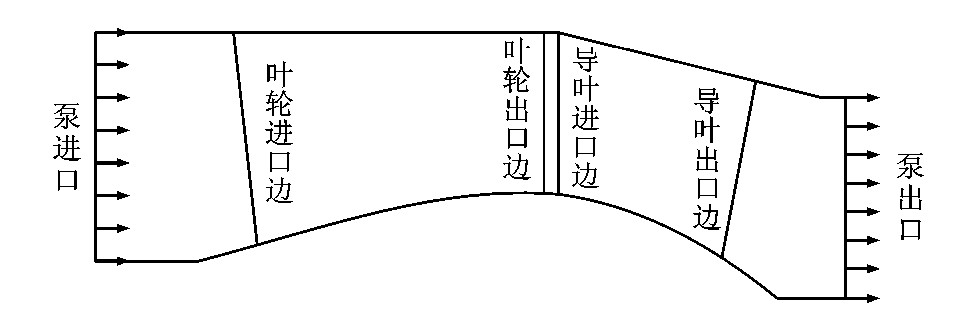
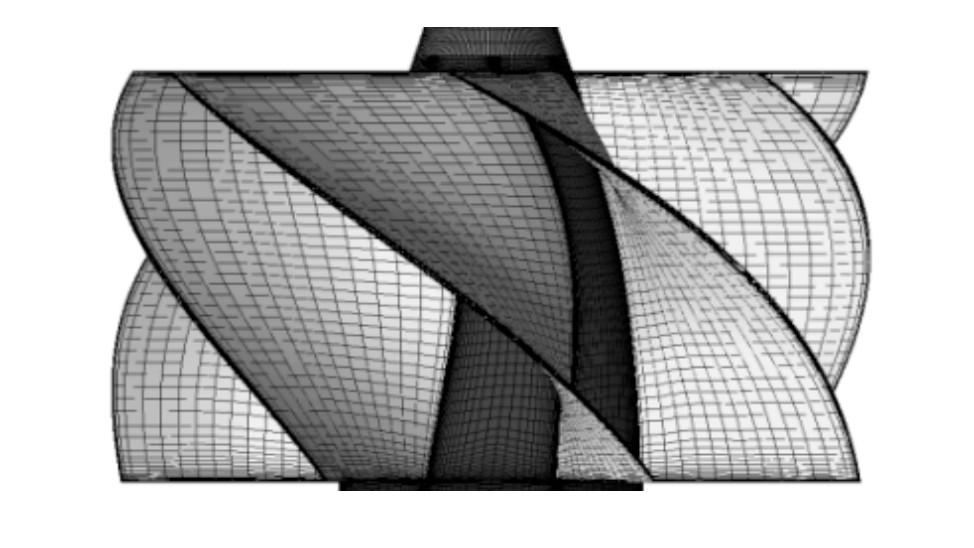
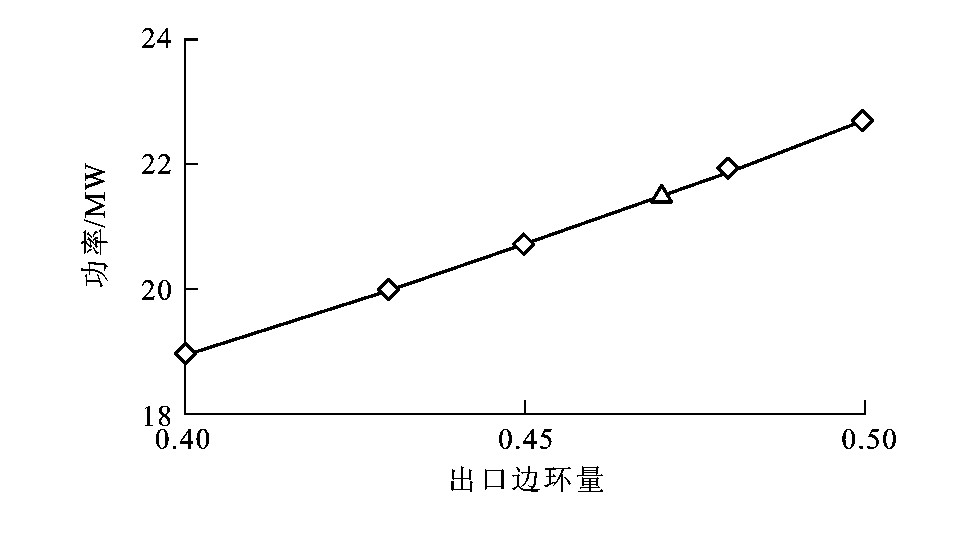
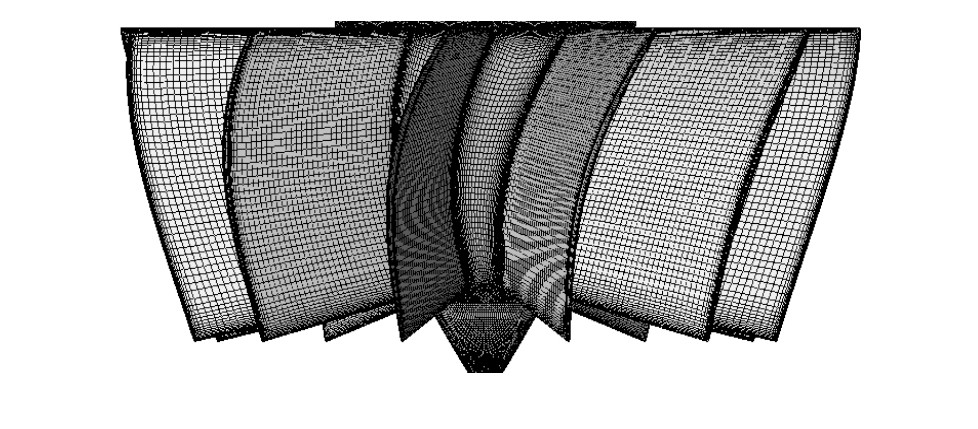
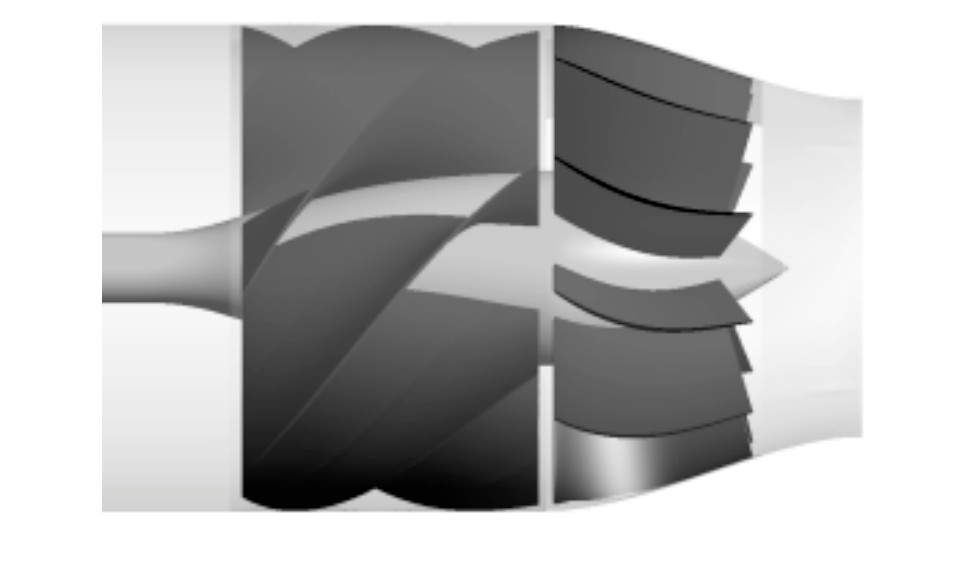
喷水推进轴流泵三元水力设计
曹玉良
,
王永生
,
靳栓宝
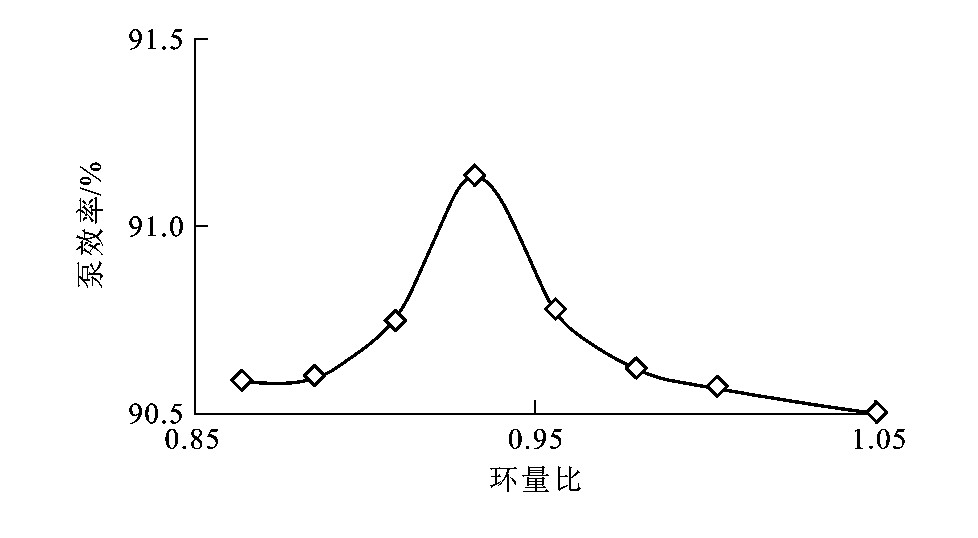
摘要:
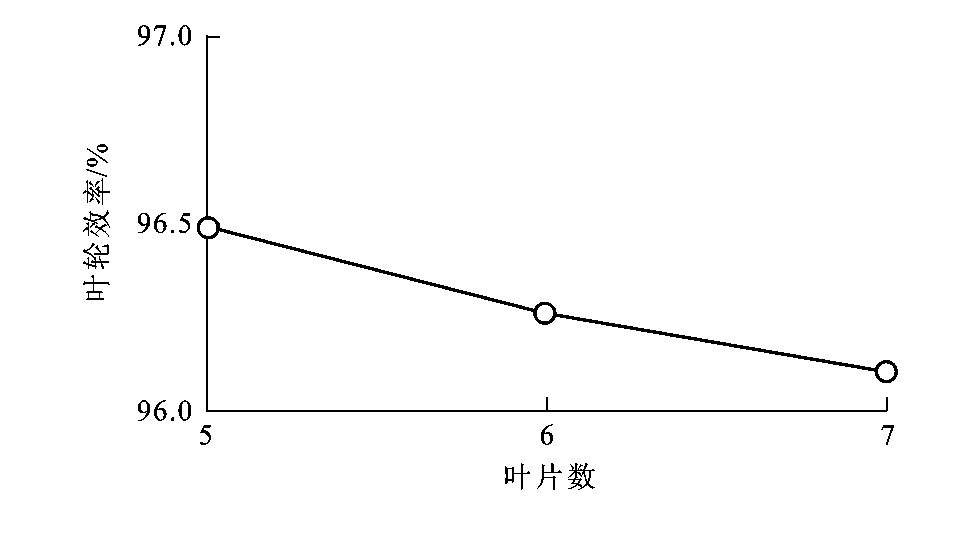
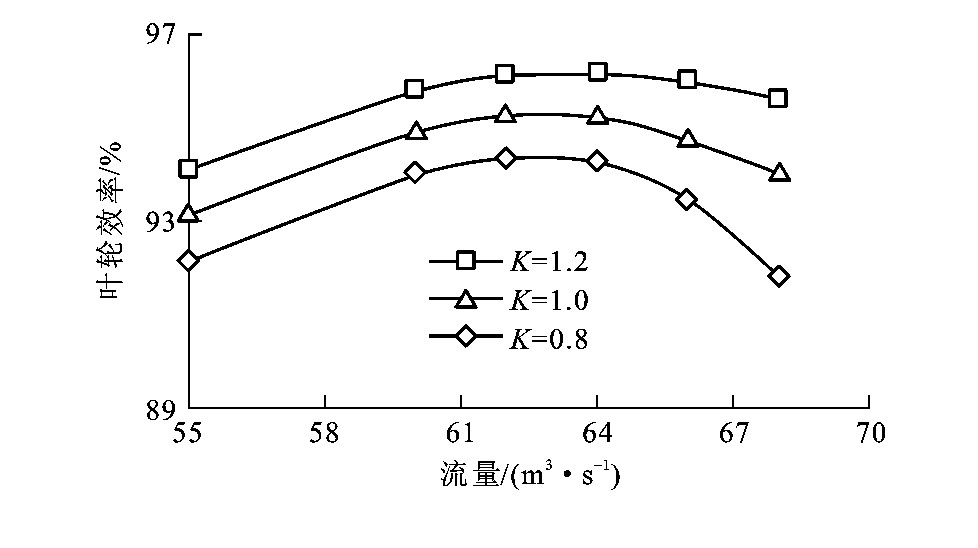
基于环量的三元设计方法和计算流体动力学, 研究了叶片数、叶片流向环量中心位置与叶片出口边环量对叶轮性能的影响, 分析了导叶进口边和出口边环量对喷水推进轴流泵性能的影响, 通过合理地控制这些因素, 设计了一种效率高、空化性能好的喷水推进轴流泵。在流量为56.2m3·s
-1
时, 泵的扬程为35.9m, 功率为21 465kW, 效率为92.3%, 可见, 设计泵的性能优良, 效率高。研究结果表明: 增加叶片数能够有效减小单叶片转矩, 当叶片数从5个增加到7个时, 单叶片转矩减小了21%;叶片环量中心靠近出口边, 有利于提高叶轮的空化性能, 当环量中心从叶片弦长的0.3处移动到0.7处时, 叶轮吸力面空化面积减小80%;叶轮出口边环量斜率会影响叶轮效率, 当斜率分别为0.8、1.0和1.2时, 叶轮效率逐步提高; 当出口边环量从0.40增加到0.50时, 叶轮的扬程和功率近似线性增加, 扬程增加19.9%, 功率增加19.5%;随着导叶进口边环量与出口边环量的比值的增大, 泵效率先增大后减小, 当比值为0.93时, 泵的效率最高; 导叶出口边环量分布会影响泵的效率、出口不均匀度和出口周向动能, 当导叶出口边环量为-0.05时, 泵的效率最高, 出口不均匀度和出口周向动能最小。
更多>
2015, 15(2): 42-49.
doi:
10.19818/j.cnki.1671-1637.2015.02.005
摘要
(
1978
)
HTML
(
488
)
PDF (1187KB)
(
915
)
引用
(
)
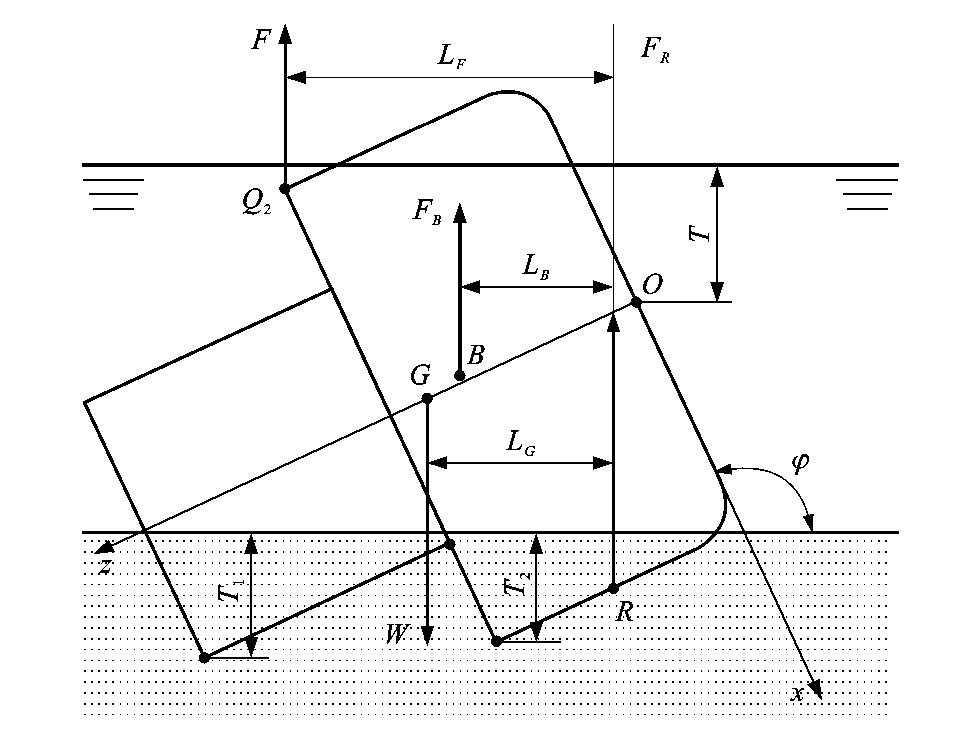
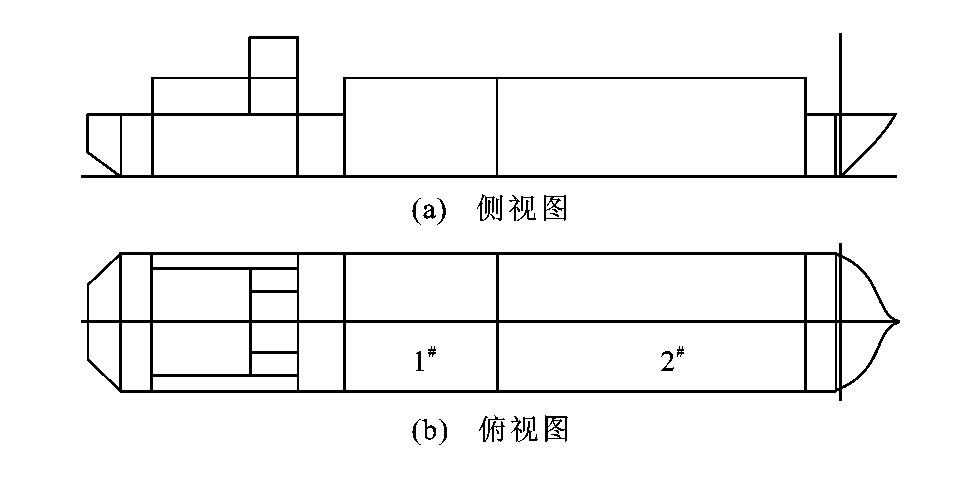
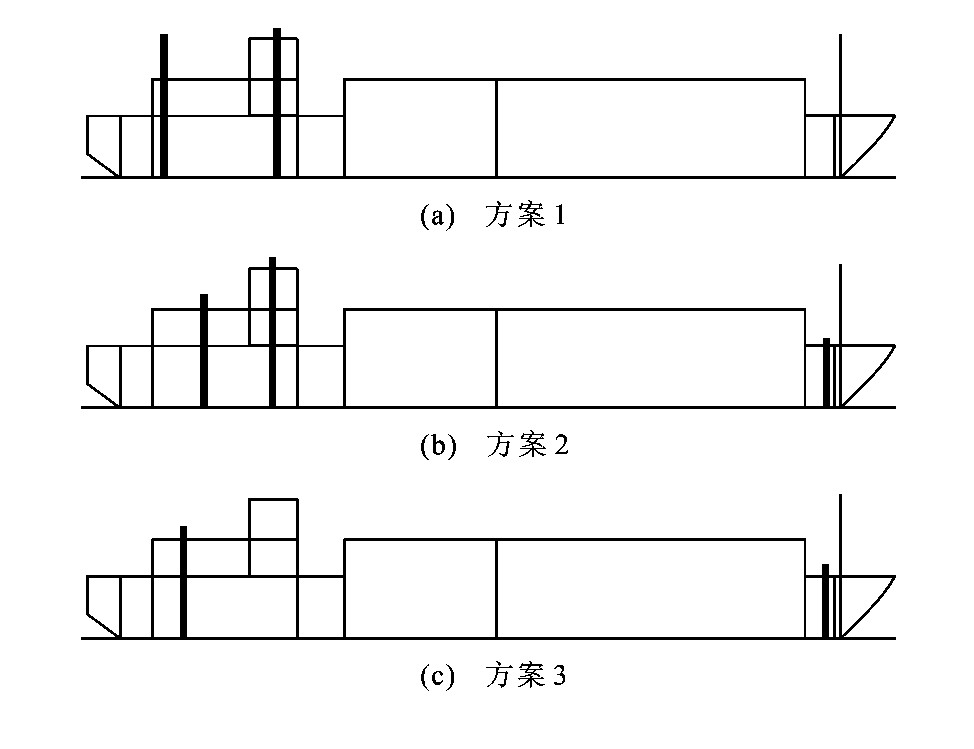
大倾角搁浅船舶扳正过程分析
潘德位
,
林成新
,
孙德平
,
刘志杰
,
周超玉
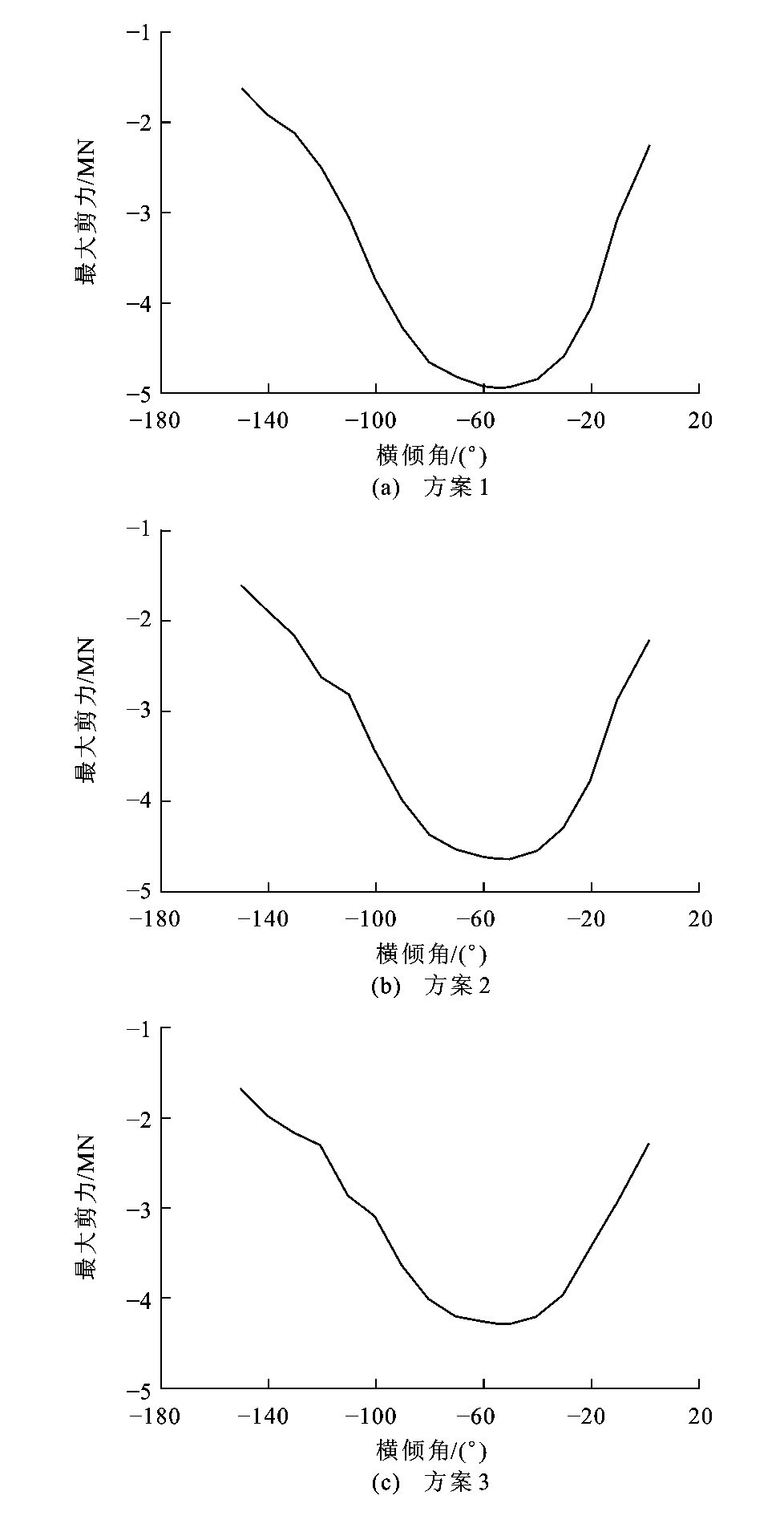
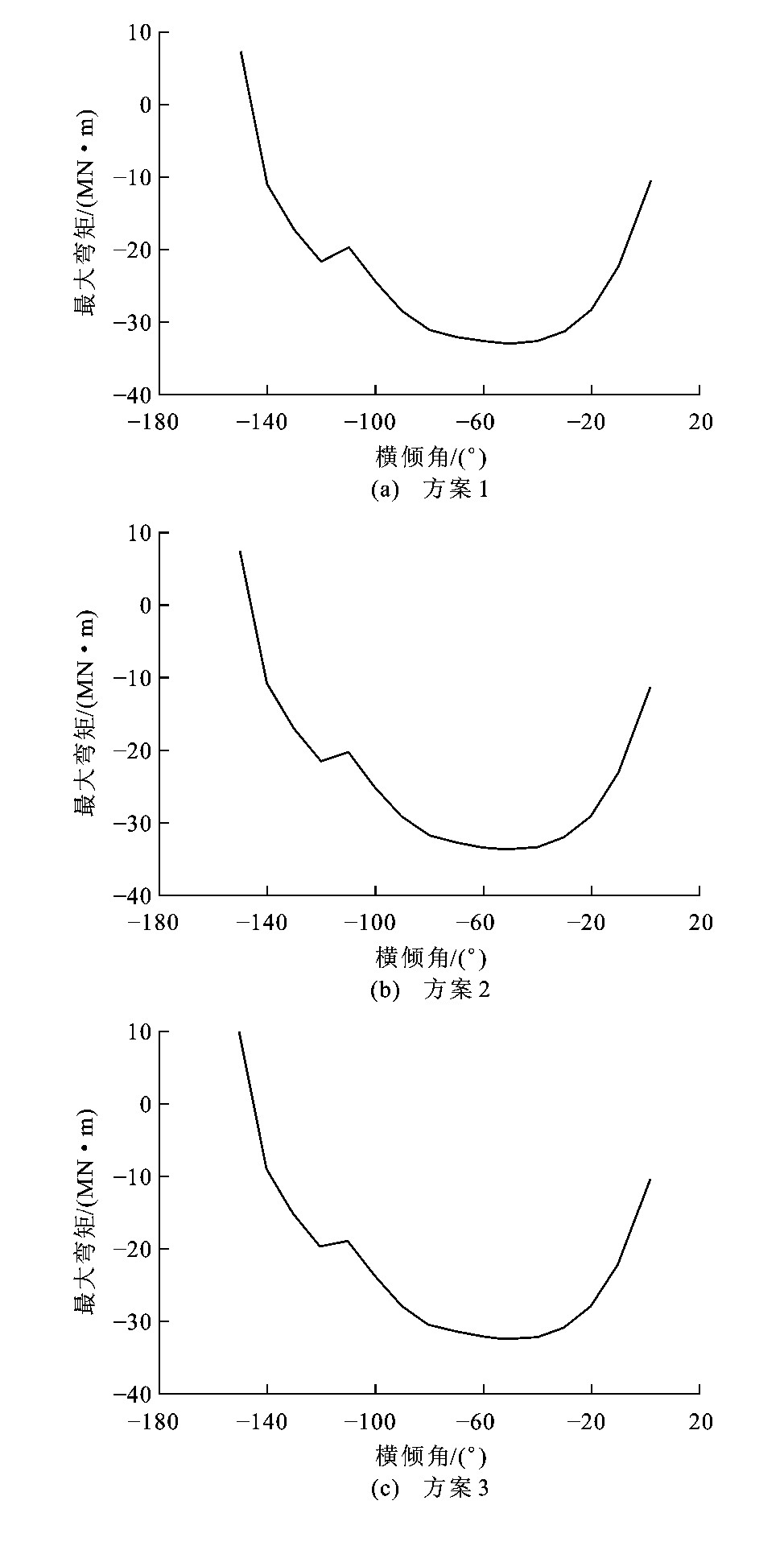
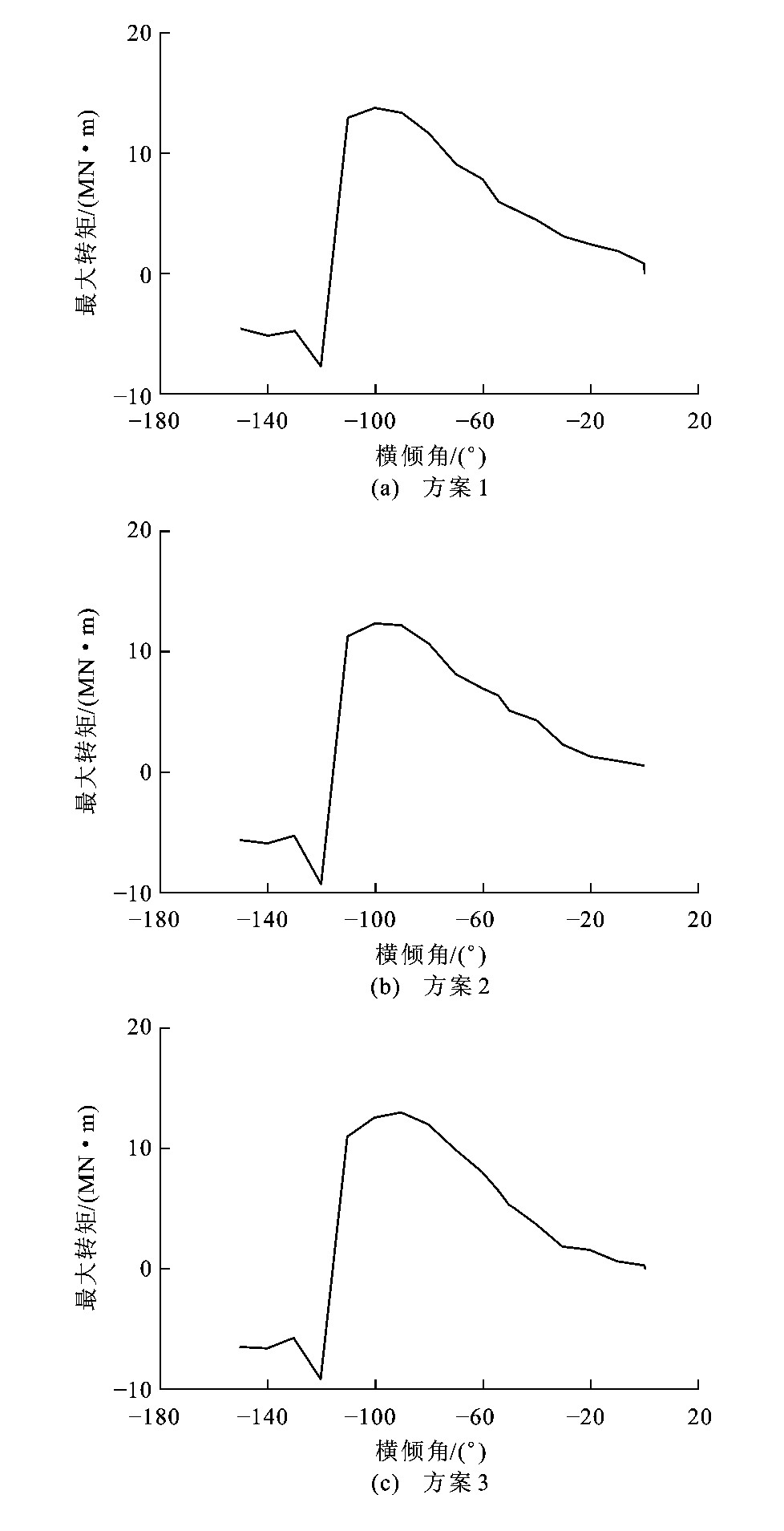
摘要:
在研究大倾角搁浅船舶的扳正过程中, 计算了难船扳正力、横倾角和吃水。根据搁浅船舶的受力特点, 建立了其力学模型, 分析了扳正过程中横倾角、吃水、入泥深度与海底泥土性质对船体的影响。利用GHS软件模拟搁浅船舶的扳正过程, 以某搁浅液化气船舶为例, 求解了其扳正过程中船体扳正力、总搁坐力、剪力、弯矩和转矩, 比较了难船不同扳正方案, 分析了难船的扳正方式、搁坐位置、上层建筑与储气罐对难船打捞的影响。分析结果表明: 在扳正过程中, 3个方案的力学参数的变化趋势是一致的。最大扳正力相差较大, 差值为9.1%~20.0%。搁坐力、剪力和弯矩均在横倾角为-55°~-50°时达到最大值, 船体虽然在该阶段不需加载较大的扳正力, 但仍应该注意船体的受力情况。在横倾角为-120°~-100°时, 转矩变化非常剧烈。弯矩和转矩均出现了反向变化的现象, 威胁船体结构的安全, 扳正中应该谨慎处理。选择合适的扳正方案时应该综合考虑扳正力施力点的位置和扳正过程对船体与环境安全的潜在威胁。
更多>
2015, 15(2): 50-58.
doi:
10.19818/j.cnki.1671-1637.2015.02.006
摘要
(
2521
)
HTML
(
644
)
PDF (438KB)
(
876
)
引用
(
)
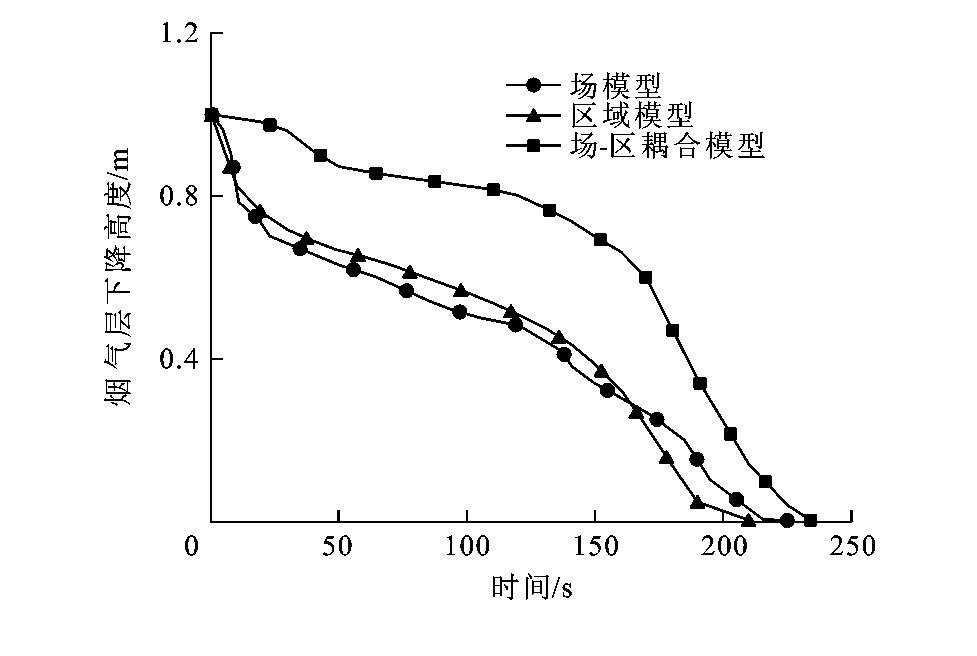
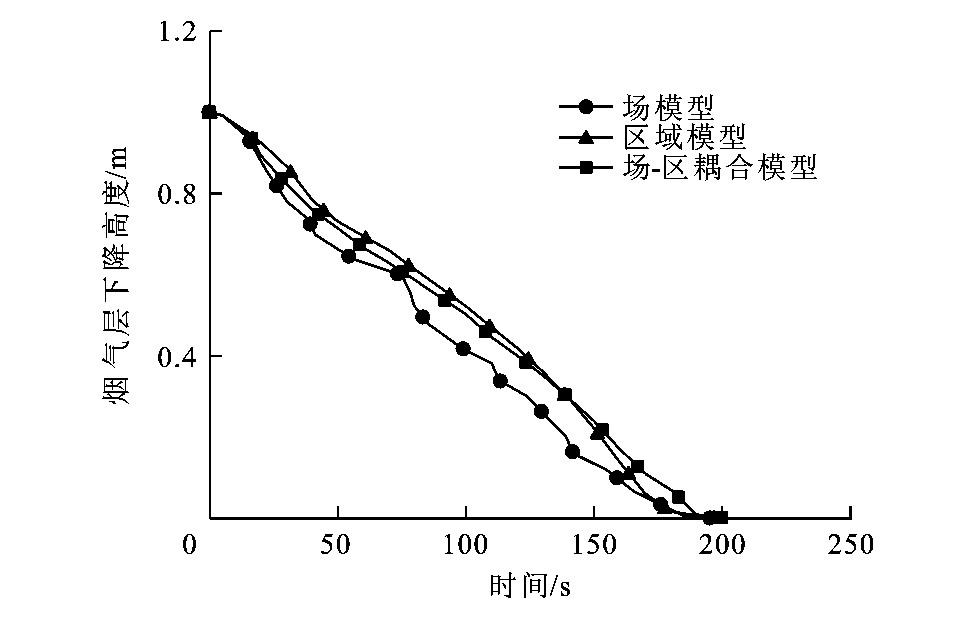
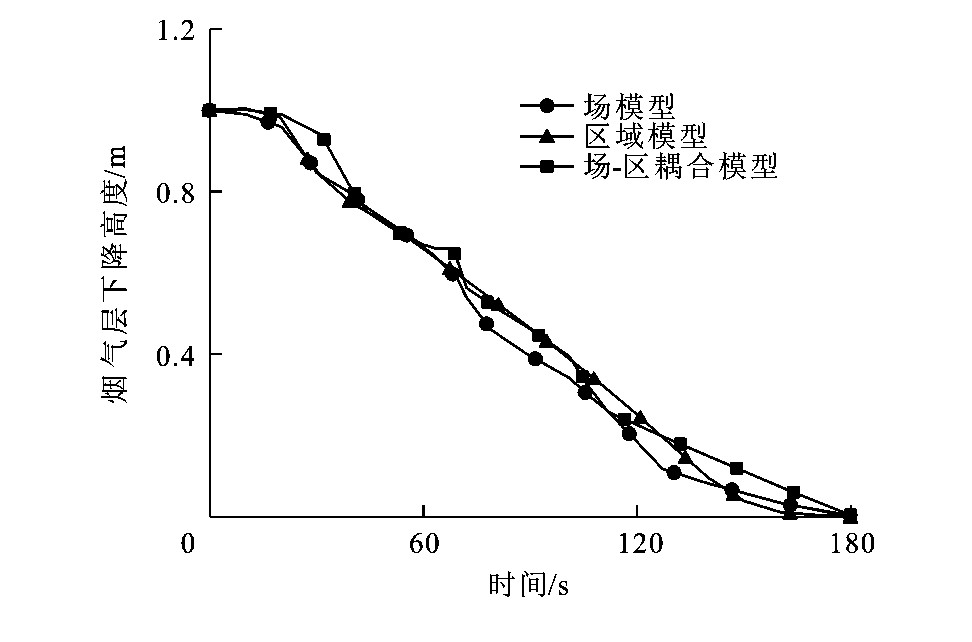
船舶舱室火灾烟气蔓延的场-区耦合模型
汪金辉
,
焦宇
,
许涛
,
陈伟炯
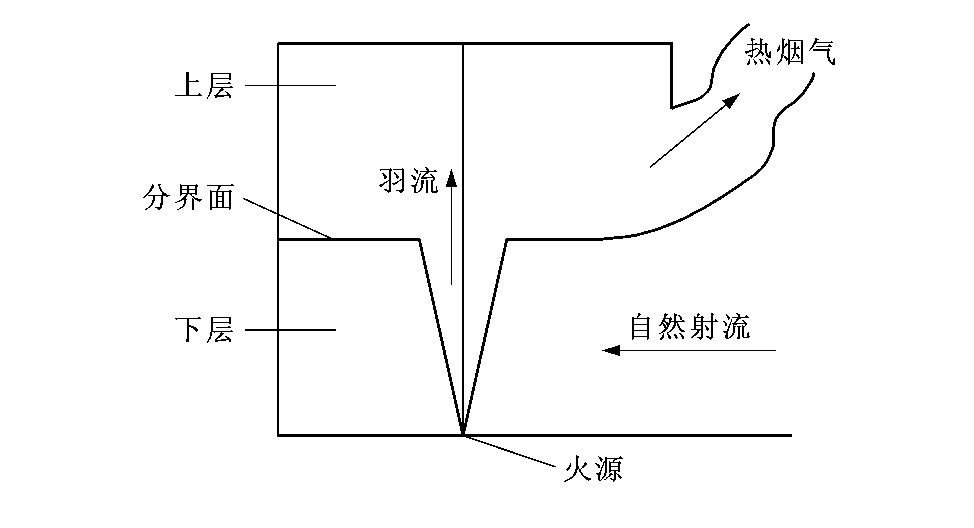
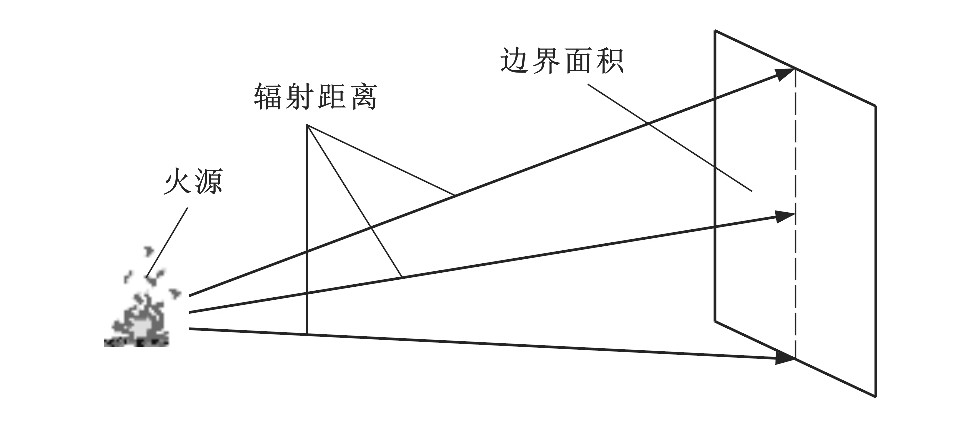
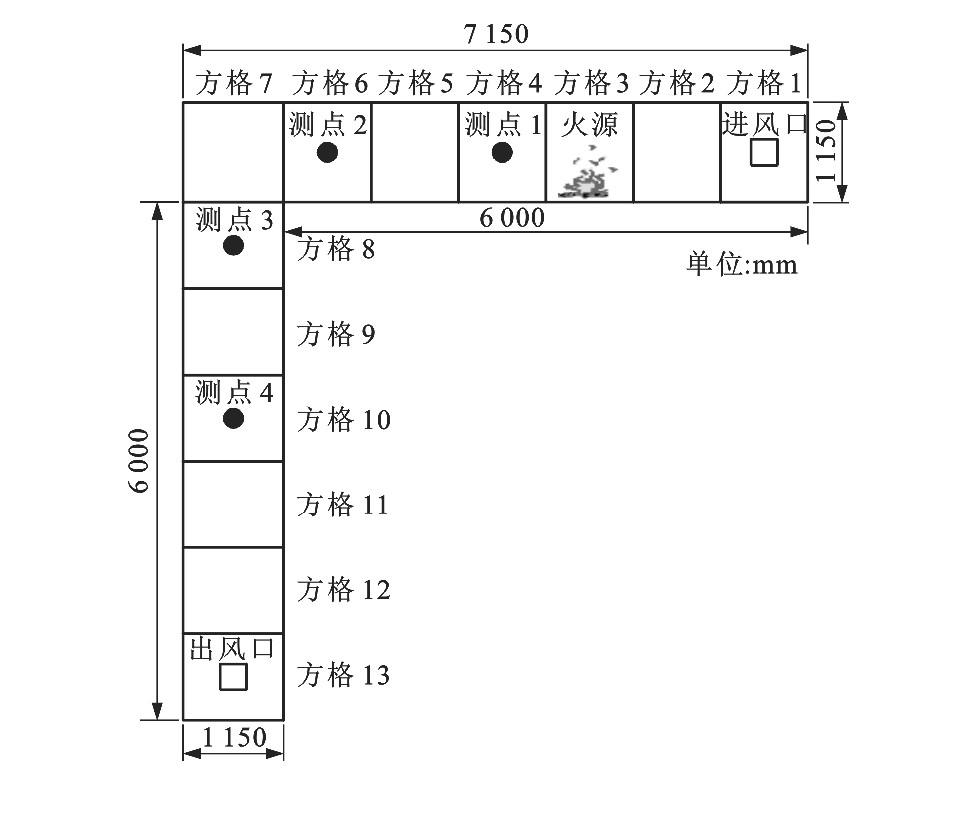
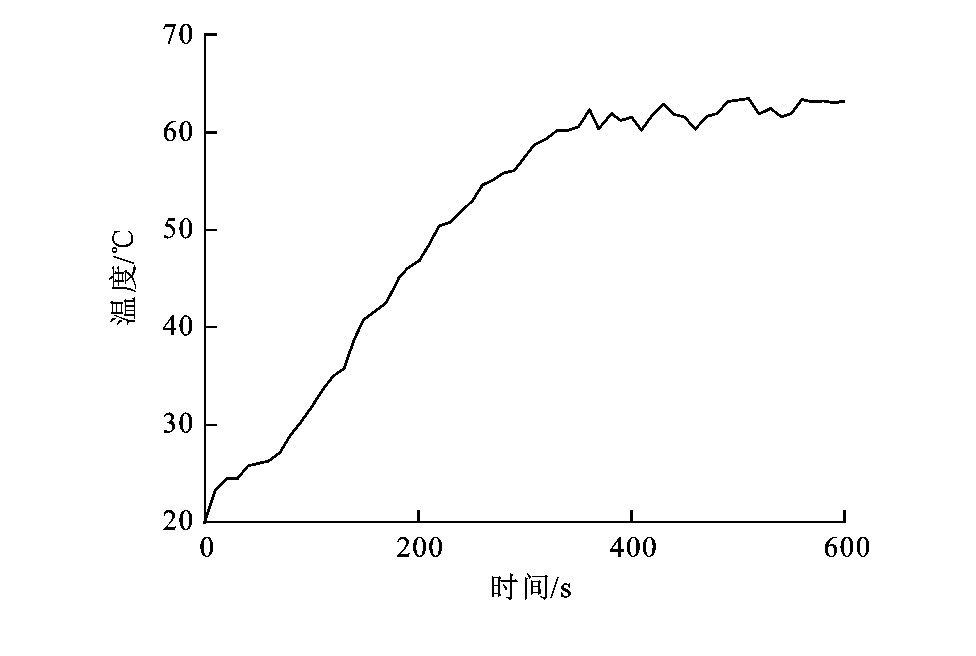
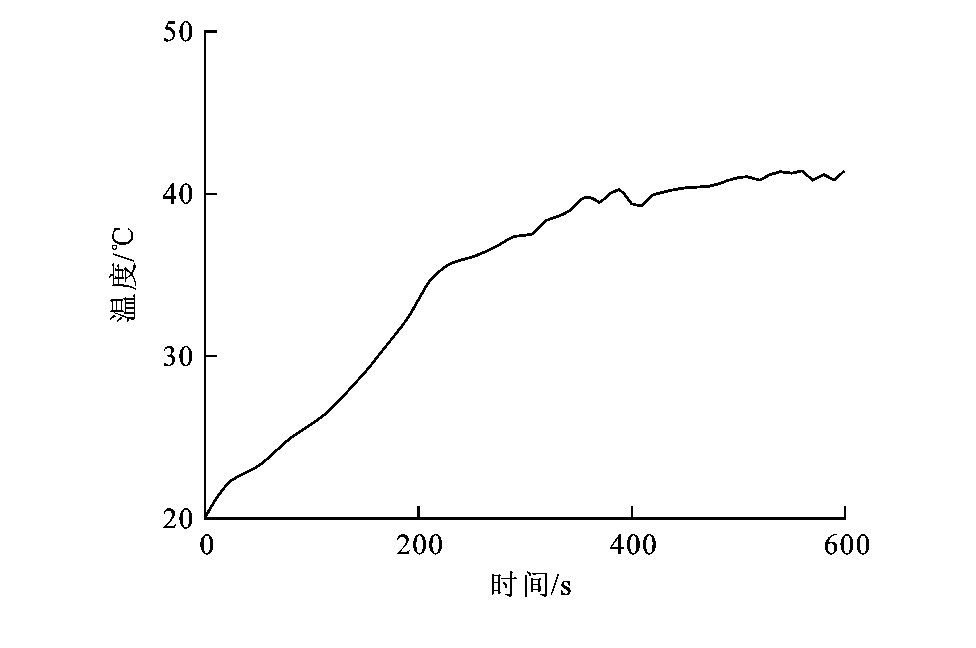
摘要:
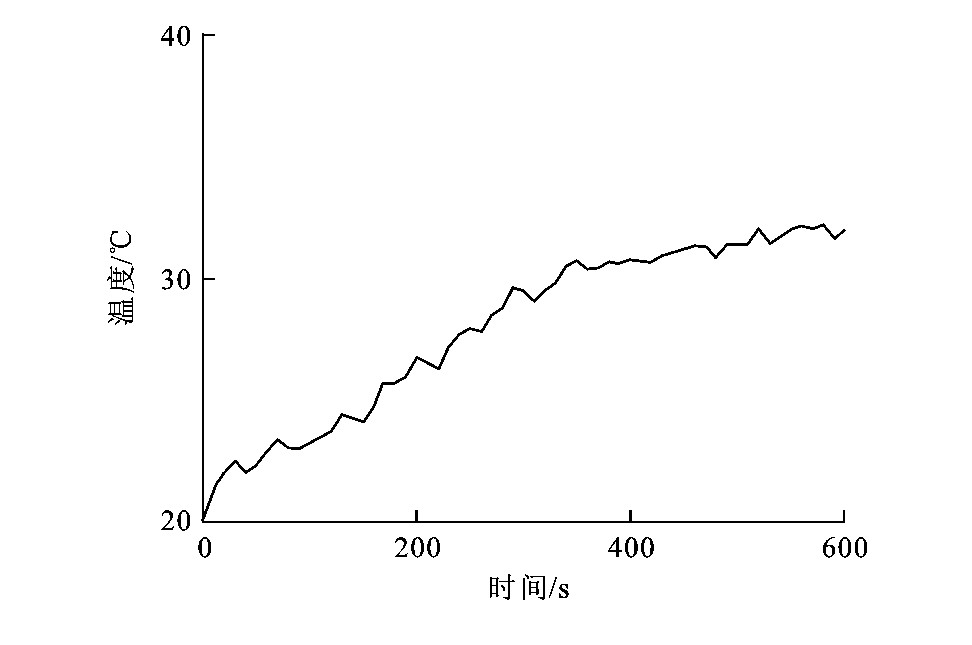
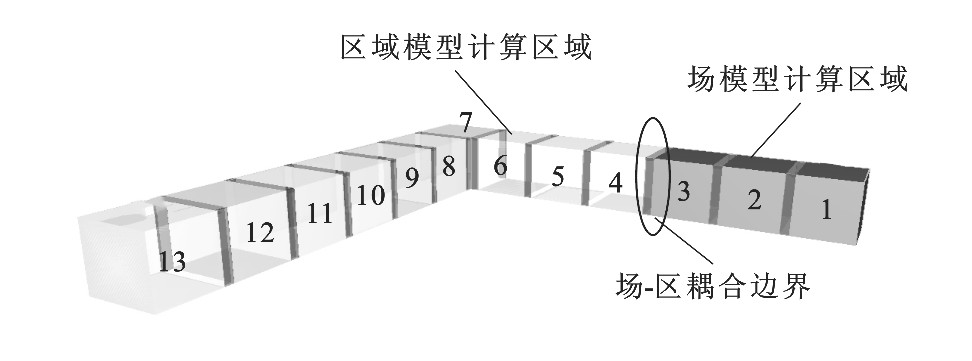
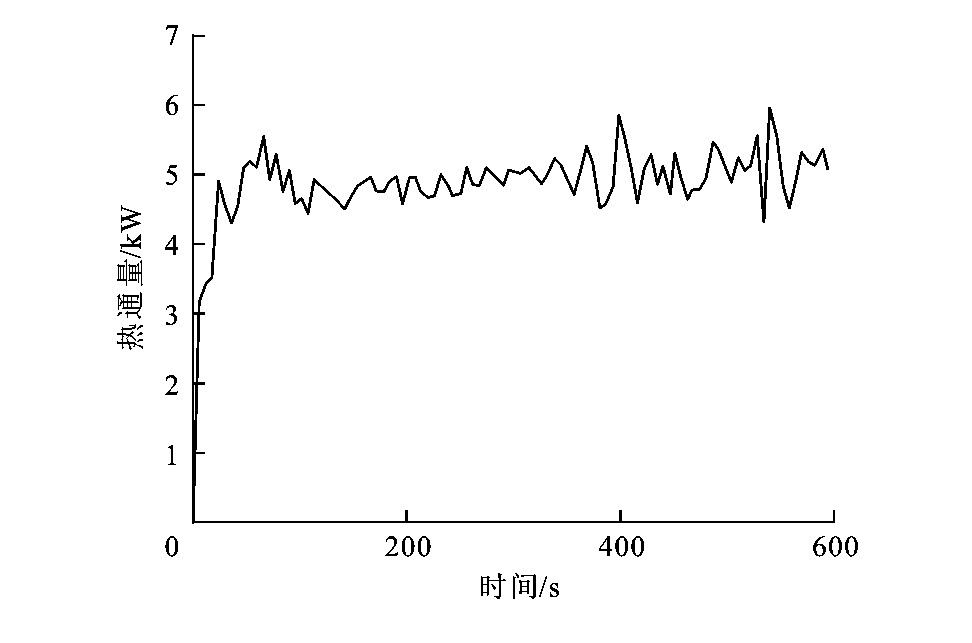
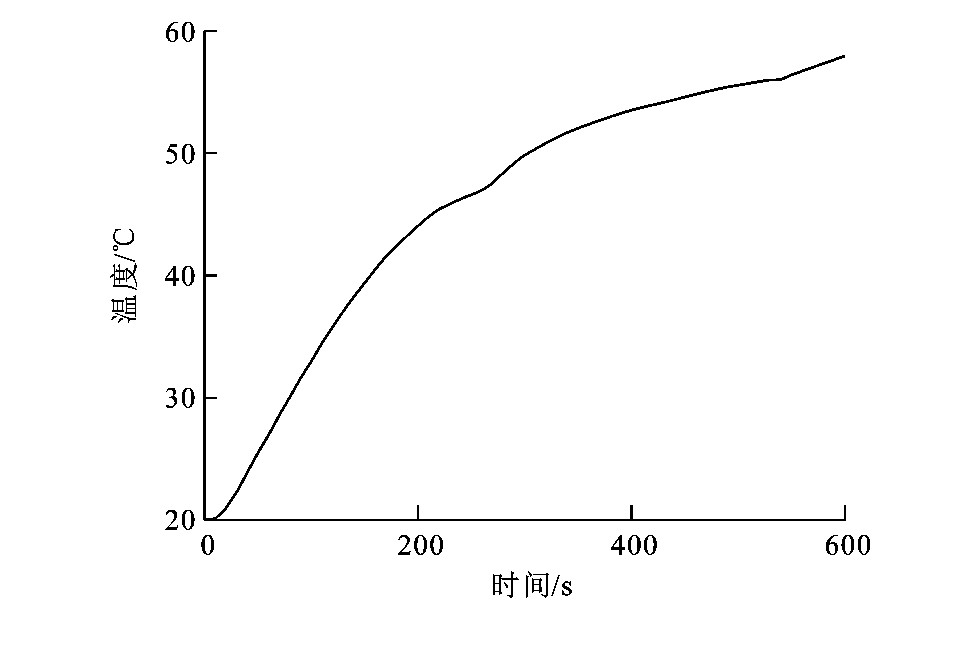
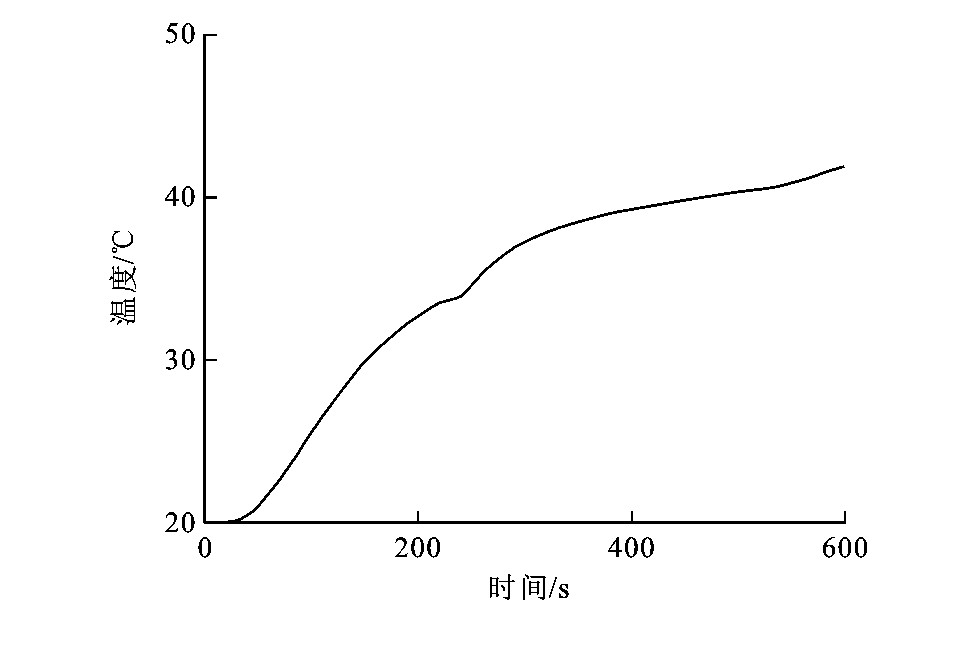
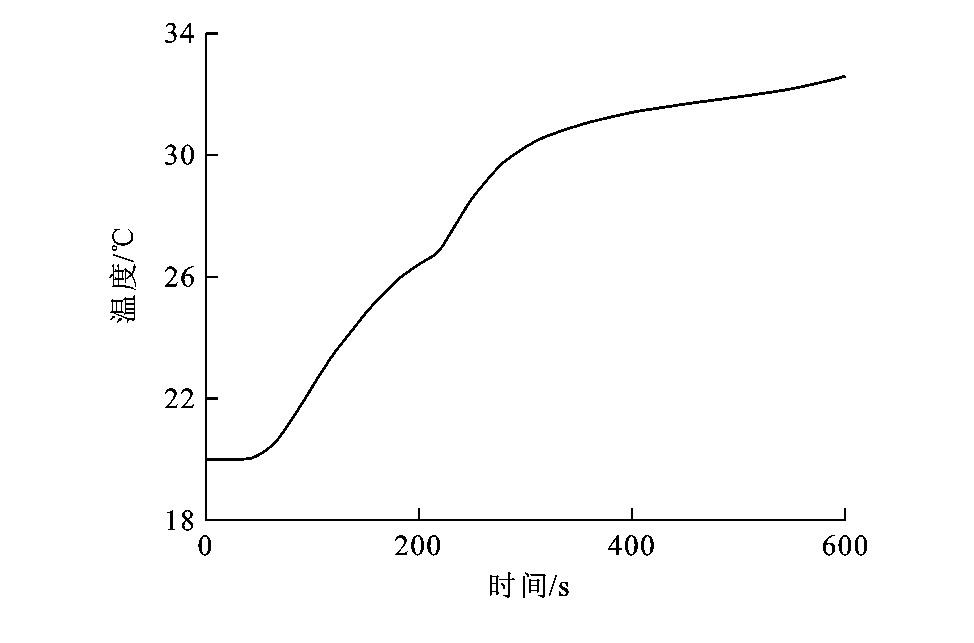
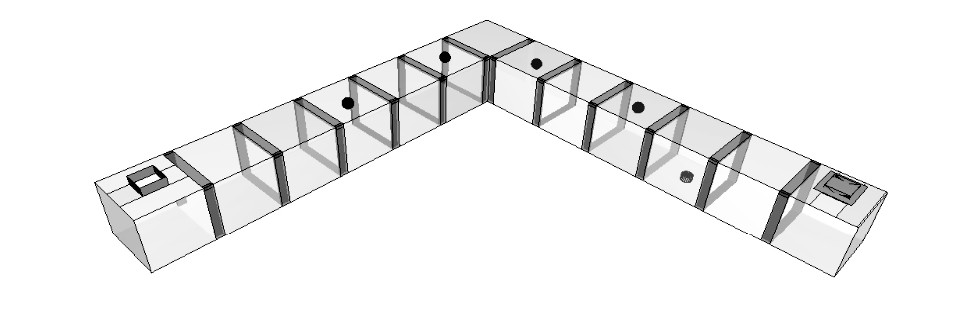
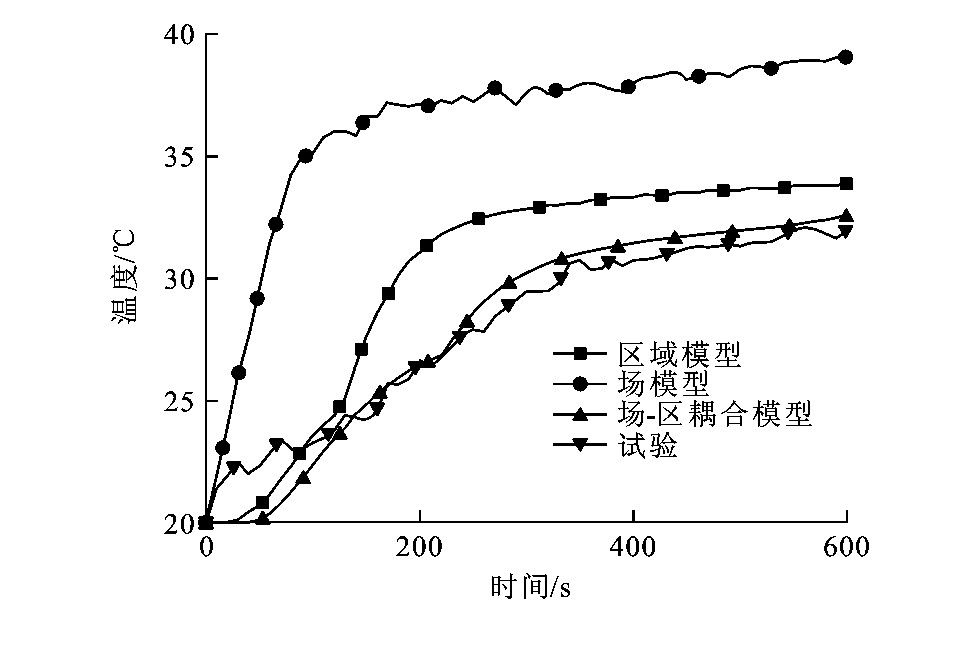
针对大型船舶火灾中的烟气蔓延, 分析了场模型FDS软件和区域模型CFAST软件各自的局限性。基于能量传输、组分转换和压力平衡原理, 建立了船舶舱室火灾烟气蔓延的场-区耦合模型。搭建了带有4个测点的船舶舱室火灾缩尺试验平台, 验证了耦合模型的有效性。对船舶舱室火灾的烟气蔓延进行了场模拟、区域模拟和场-区耦合模拟, 并将温度和烟气层高度的模拟结果进行对比分析。分析结果表明: 4个测点的温度均随着时间的增大而上升, 在同一时刻距火源近的测点温度高, 随着与火源间距离的变大, 测点温度降低, 4个测点的温度受烟气湍流的影响略有波动; 在燃烧达到稳定状态之后, 场-区耦合模型能较准确地模拟烟气层高度的变化规律, 均优于场模型和区域模型的模拟结果; 在计算时间上, 场-区耦合模型比场模型缩减了约54%的计算时间; 场-区耦合模型的模拟结果与试验结果具有良好的一致性, 因此, 其具有较好的工程应用价值。
更多>
2015, 15(2): 59-69.
doi:
10.19818/j.cnki.1671-1637.2015.02.007
摘要
(
1879
)
HTML
(
442
)
PDF (917KB)
(
881
)
引用
(
)
交通运输规划与管理
基于RHC-GA的多跑道进离场航班多目标动态优化模型
张启钱
,
胡明华
,
张洪海
摘要:
以管制负荷与航班延误总成本最小为目标函数, 以尾流间隔、跑道限制与最大位置约束为约束条件, 结合中国民航最新运行标准, 建立了基于滚动时域控制策略的多跑道进离场航班多目标动态优化模型。针对模型求解规模庞大的特点, 结合滚动时域控制策略的动态特性, 设计了求解模型的遗传算法, 选取中国某大型繁忙机场高峰时段的48个航班数据进行实例验证。仿真结果表明: 当重、中、轻3种机型的单位飞行成本分别为25、16、10元·s
-1
时, 采用现有先到先服务的策略, 总延误损失为36 098元, 管制负荷为32架次; 当采用5个滚动时域的控制策略时, 总延误损失为28 900元, 管制负荷为31架次; 当采用4个滚动时域的控制策略时, 总延误损失为27 375元, 管制负荷为32架次; 当采用3个滚动时域的控制策略时, 总延误损失为27 194元, 管制负荷为33架次。与现有的先到先服务策略相比, 提出的模型能动态地优化多跑道进离场航班排序问题, 有效减少延误损失, 并均衡跑道资源利用状况。
更多>
2015, 15(2): 70-78.
doi:
10.19818/j.cnki.1671-1637.2015.02.008
摘要
(
1109
)
HTML
(
462
)
PDF (507KB)
(
99
)
引用
(
)
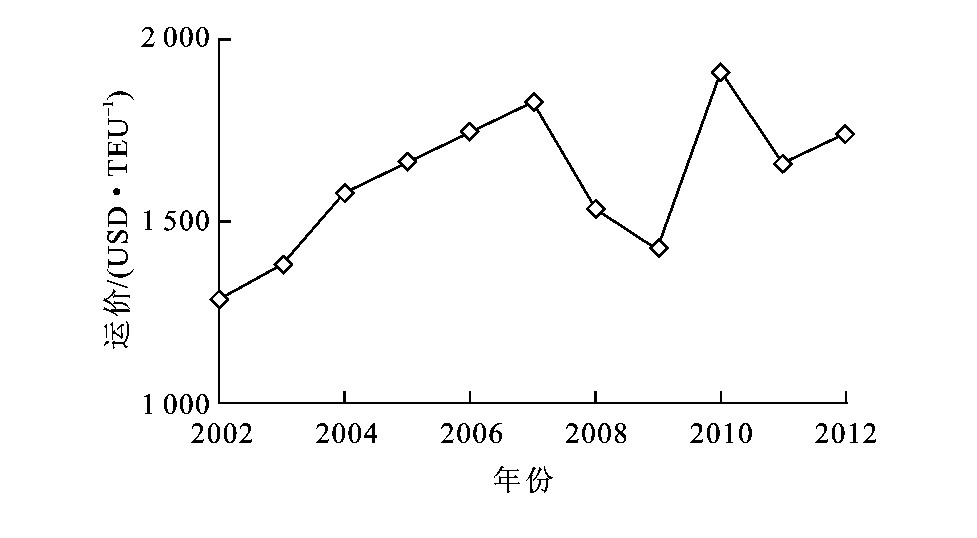
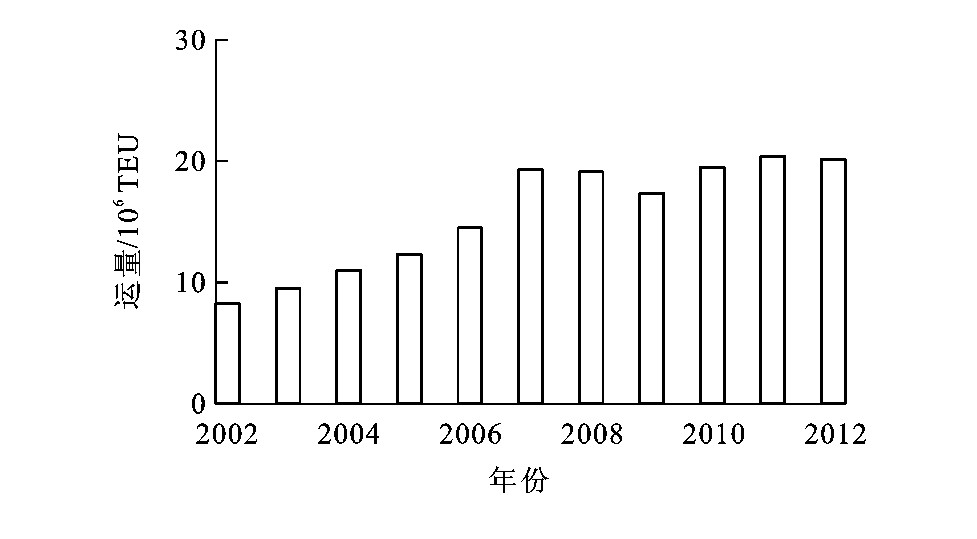
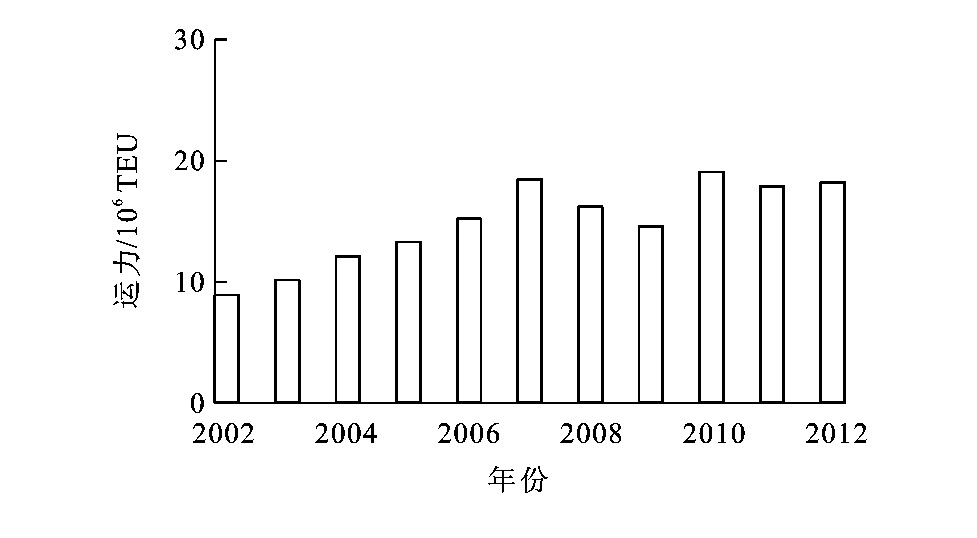
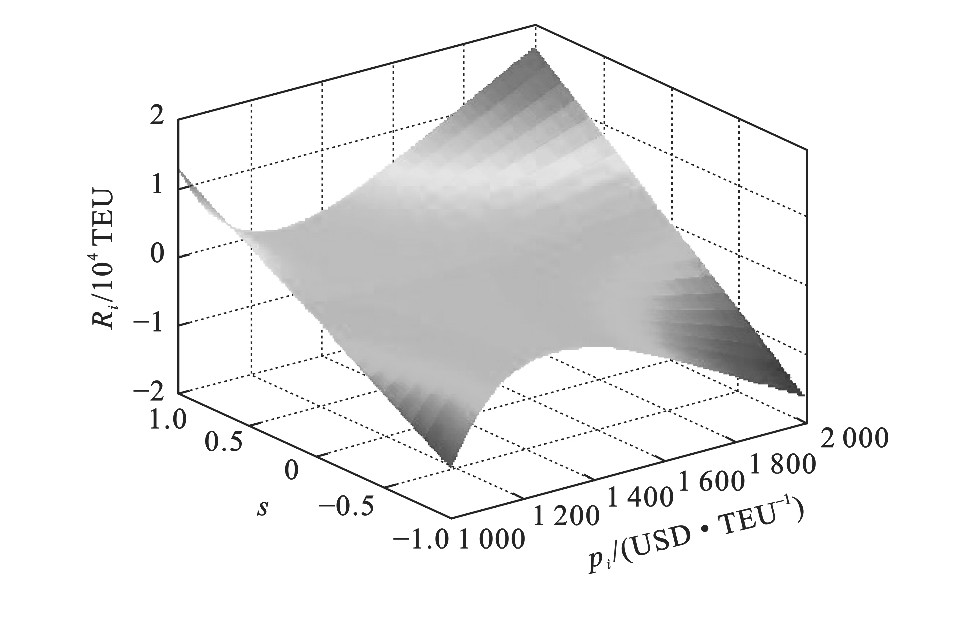
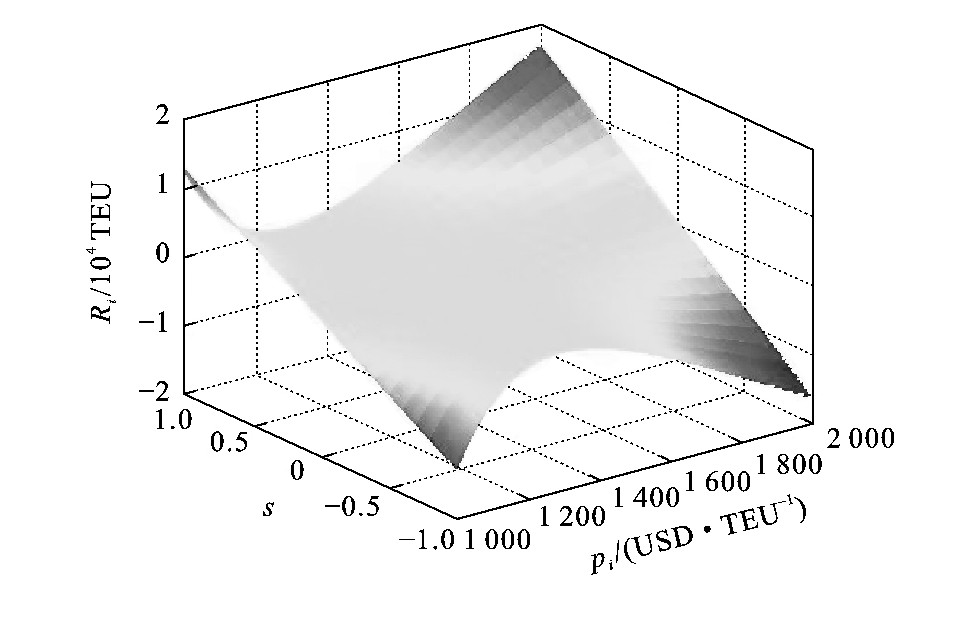
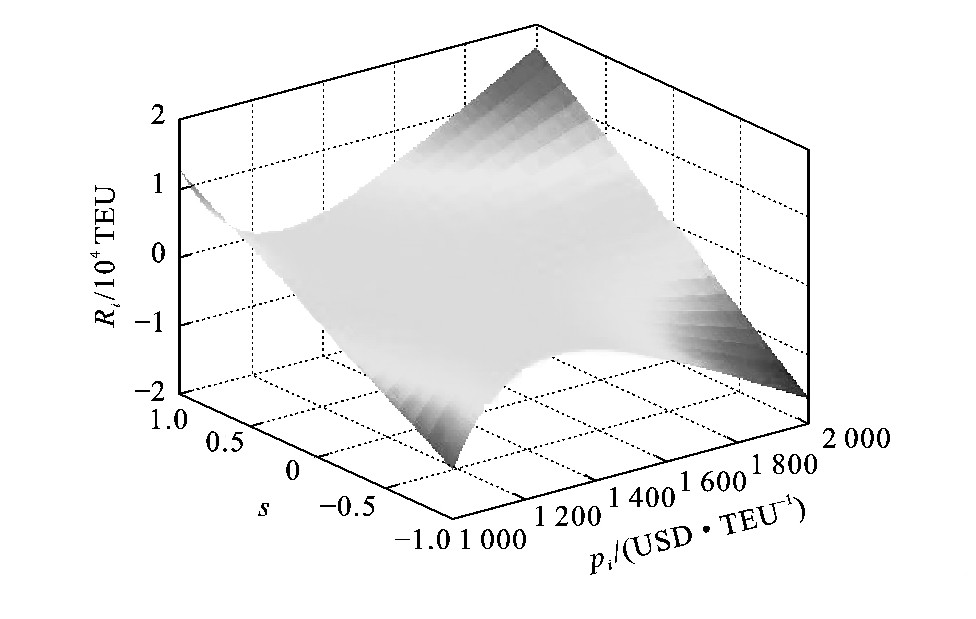
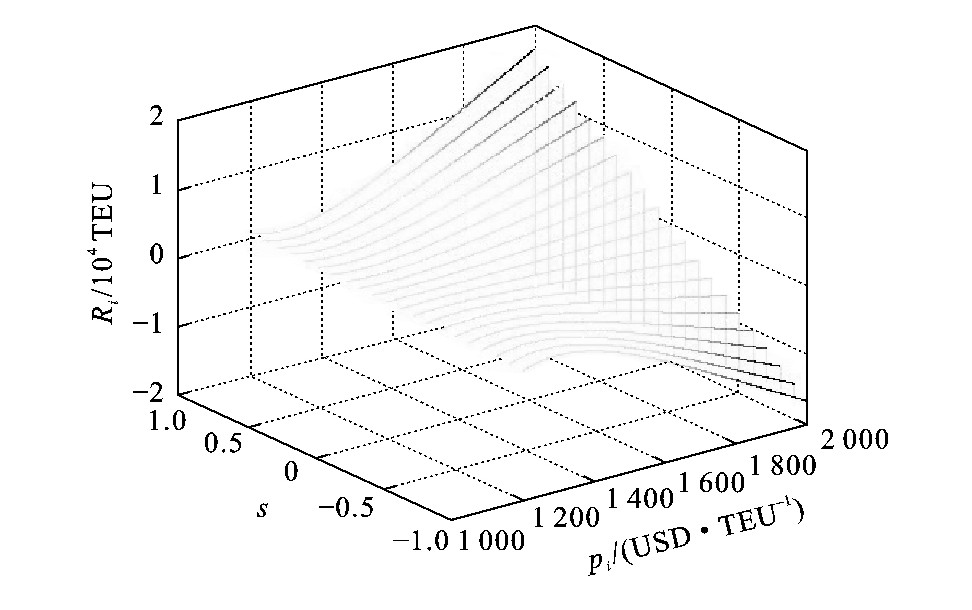
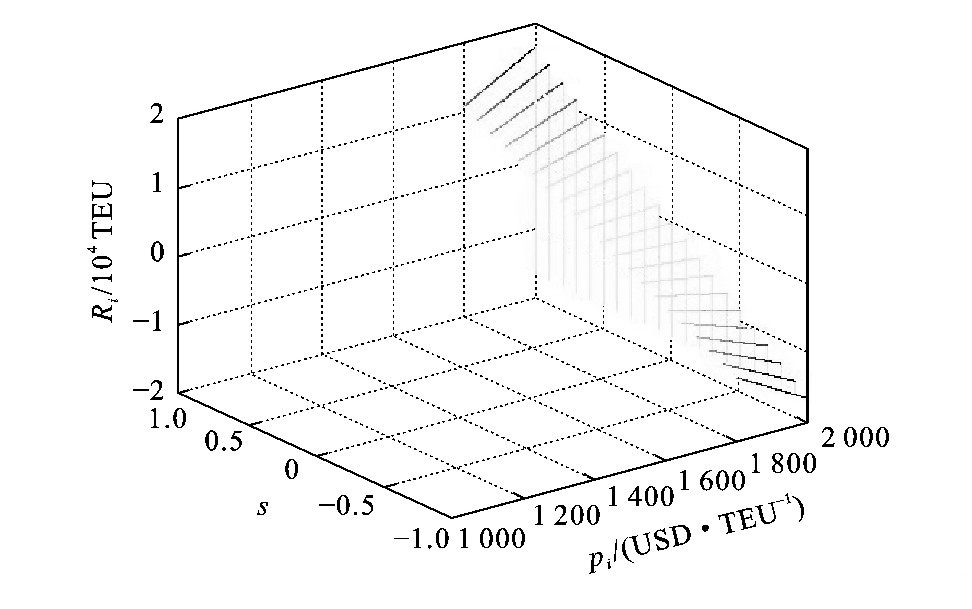
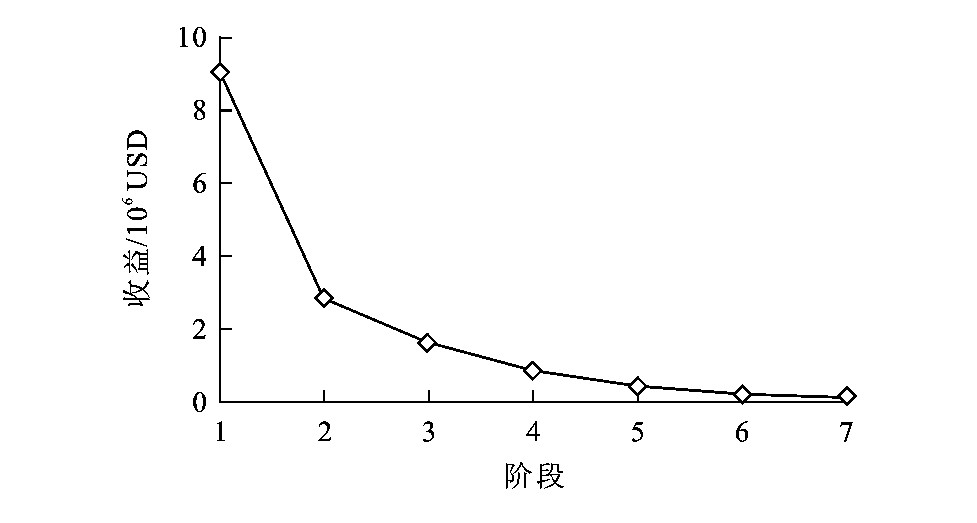
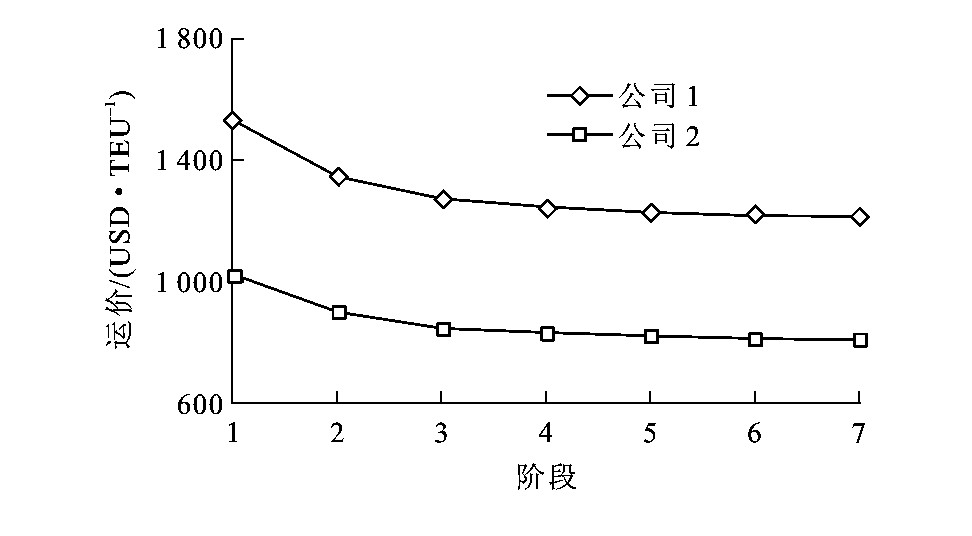
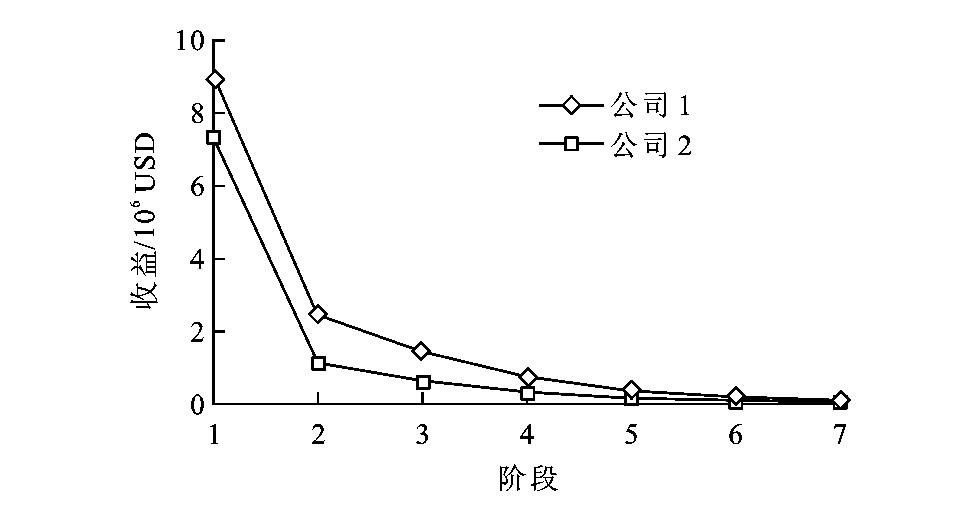
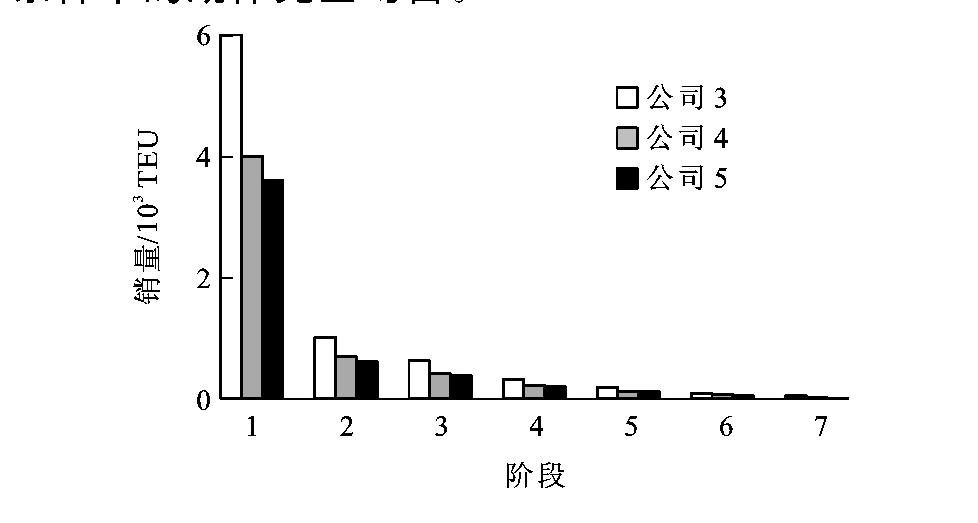
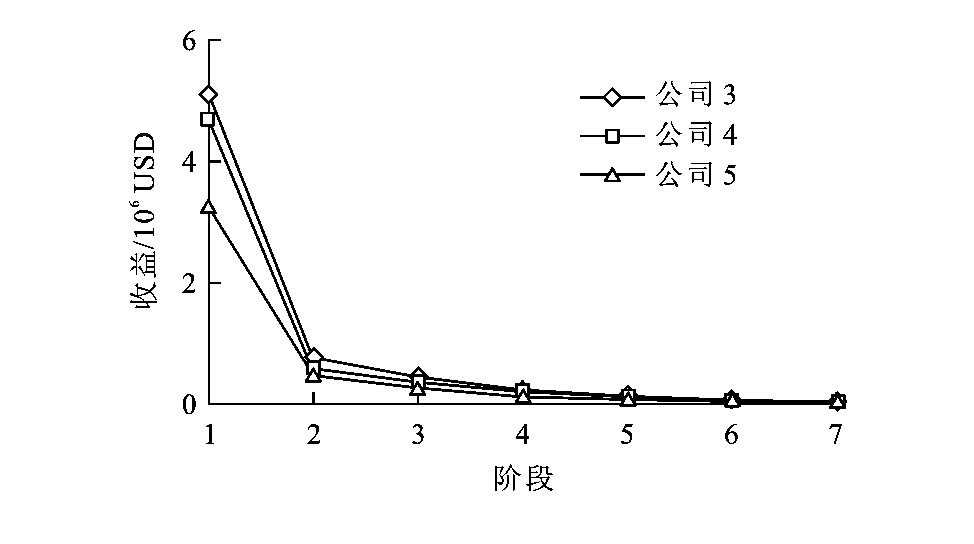
集装箱班轮公司航次运力销售过程优化模型
殷明
,
时恒
,
金甲焕
摘要:
基于种群演变和共生理论, 采用Cobb-Douglas生产函数描述航运市场整体需求, 从顾客的购买行为出发, 以收益最大作为集装箱班轮公司的经营目标, 以基于时间序列的运力与运价作为决策变量, 构建了集装箱班轮公司航次运力销售过程优化模型。运用Taylor公式与最小二乘法等代数变换手段将非线性规划问题转化为线性规划问题, 对关键参数进行了标定与敏感性分析, 并利用MATLAB软件进行仿真验证。仿真结果表明: 当单个集装箱班轮公司的运力为10
4
TEU时, 采用常规的销售策略, 集装箱班轮公司可售出的运力为7 534~9 966TEU, 获得收益为1 233 158~12 915 936USD, 采用提出的优化模型, 可售出的运力为9 915TEU, 获得收益为15 111 975USD, 收益至少提高17%;当2个集装箱班轮公司的运力均为10
4
TEU时, 采用提出的优化模型, 2个集装箱班轮公司可售出的运力分别为9 920、9 947TEU, 获得收益分别为14 241 771、9 737 528USD, 达到纳什均衡; 当3个集装箱班轮公司的运力均为10
4
TEU时, 采用提出的优化模型, 3个集装箱班轮公司可售出的运力分别为8 289、5 526、6 034TEU, 获得收益分别为6 755 755、6 119 906、4 377 758USD, 达到纳什均衡。可见提出的模型可描述多个集装箱班轮公司运力销售情况, 且表现出显著的优化效果。
更多>
2015, 15(2): 79-89.
doi:
10.19818/j.cnki.1671-1637.2015.02.009
摘要
(
1896
)
HTML
(
459
)
PDF (1456KB)
(
914
)
引用
(
)
基于企业社会责任的航空服务商选择博弈模型
王桂花
,
李南
摘要:
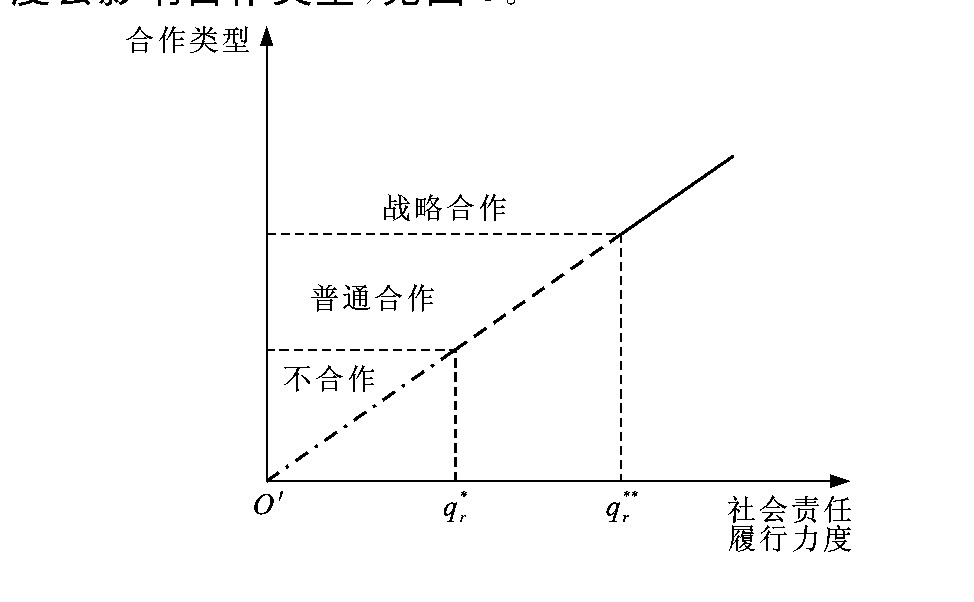
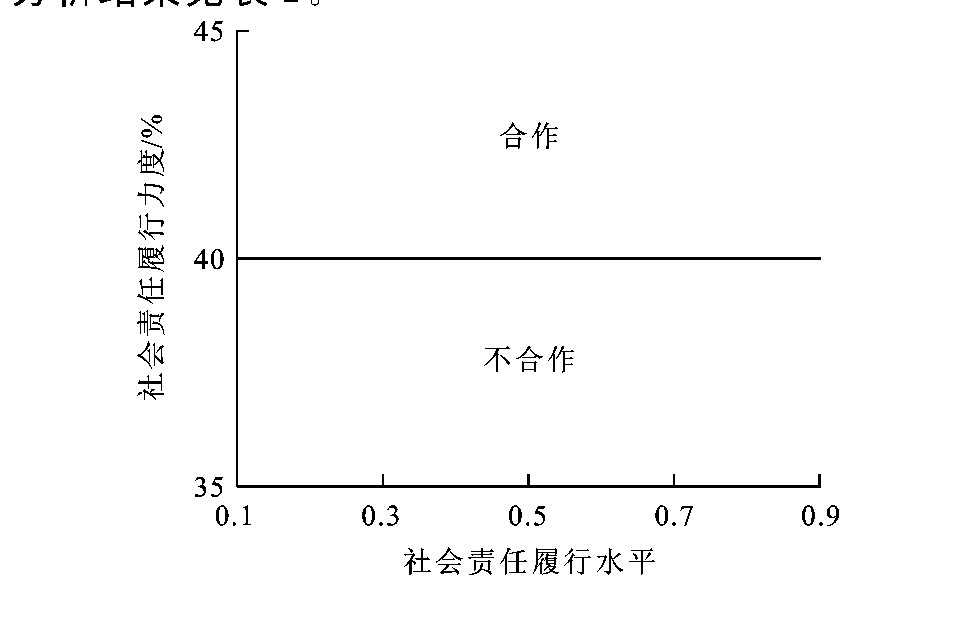
提出了企业社会责任的概念, 界定了航空服务商社会责任履行水平与履行力度。将供应链核心企业与航空服务商的博弈情形分为4种, 构建了基于企业社会责任的航空服务商选择博弈模型, 计算了供应链核心企业的长、短期合作的临界合作意愿与航空服务商的长、短期合作的临界履行概率, 分析了企业社会责任履行水平与航空服务商选择之间的关系。分析结果表明: 当航空服务商社会责任履行水平为0.5时, 供应链核心企业要求普通航空服务商社会责任的履行概率大于40%, 要求战略航空服务商社会责任的履行概率大于80%;当供应链核心企业的合作意愿大于41.67%时, 普通航空服务商就会积极履行企业社会责任, 当供应链核心企业的合作意愿大于83.33%时, 战略航空服务商才会积极履行企业社会责任; 当航空服务商的社会责任履行水平分别为0.1、0.2、0.3、0.4、0.5、0.6、0.7、0.8、0.9时, 供应链核心企业要求战略航空服务商的社会责任履行概率依次大于94.6%、90.0%、86.2%、82.6%、80.0%、77.5%、75.3%、73.3%、71.6%。与传统的方法相比, 提出的模型不仅能够明确普通航空服务商与战略航空服务商的不同具体要求, 而且揭示了企业社会责任履行水平与战略航空服务商选择之间的实质关系。
更多>
2015, 15(2): 90-99.
doi:
10.19818/j.cnki.1671-1637.2015.02.010
摘要
(
1552
)
HTML
(
374
)
PDF (450KB)
(
849
)
引用
(
)
交通信息工程及控制
城市轨道交通三维缓冲区构建方法
张文胜
,
解骞
,
朱冀军
,
张炳哲
,
纪强
,
李见春
摘要:
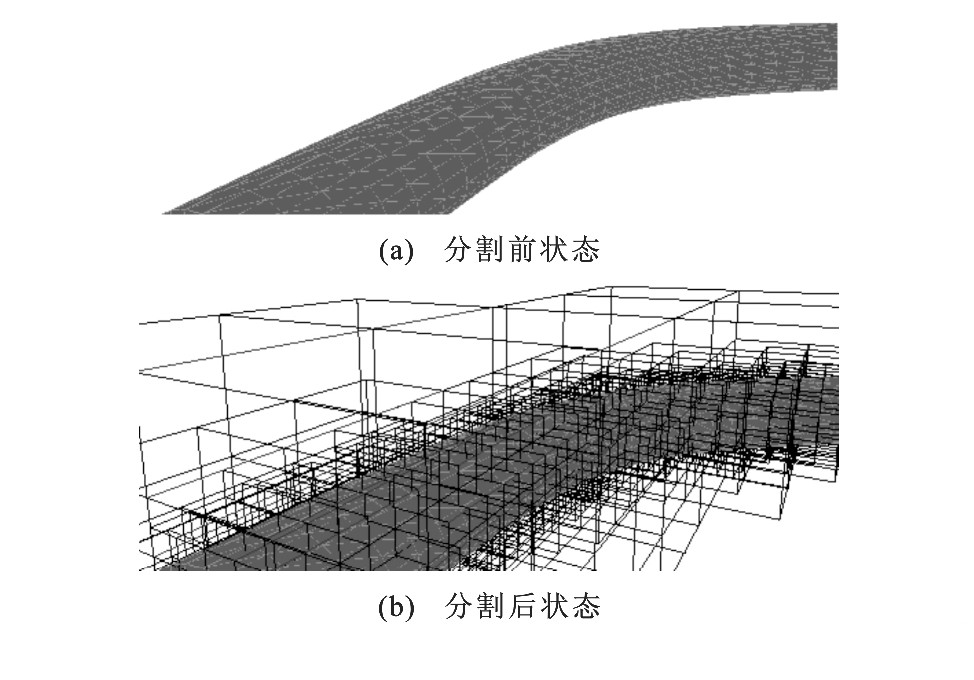
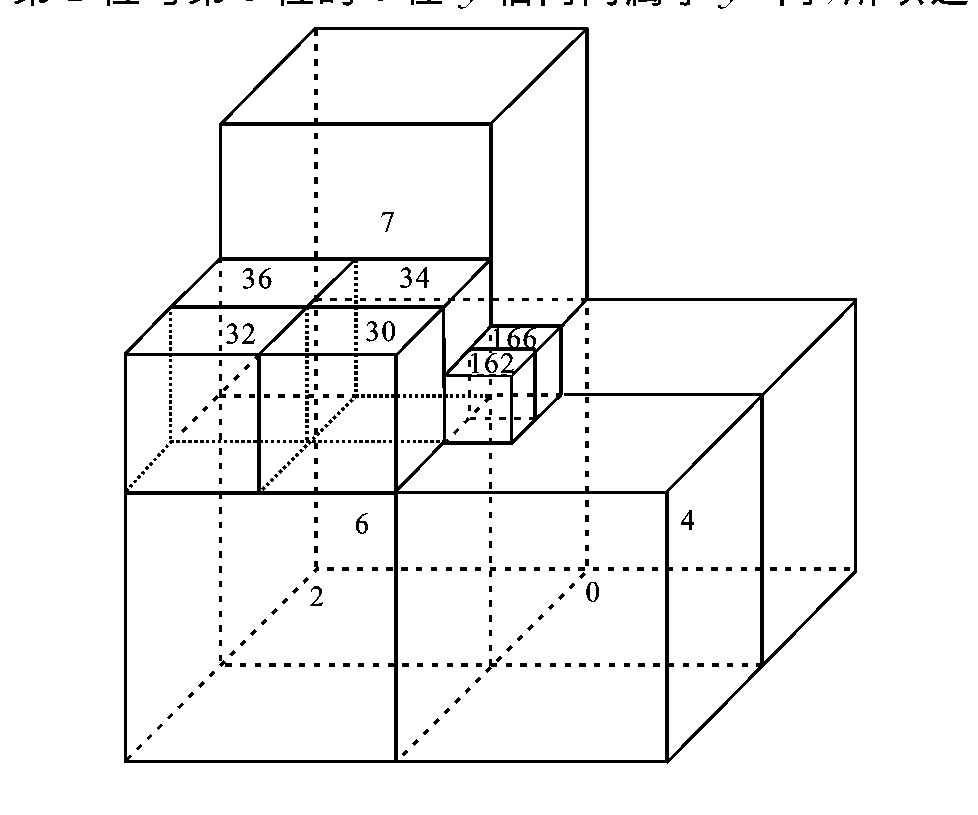
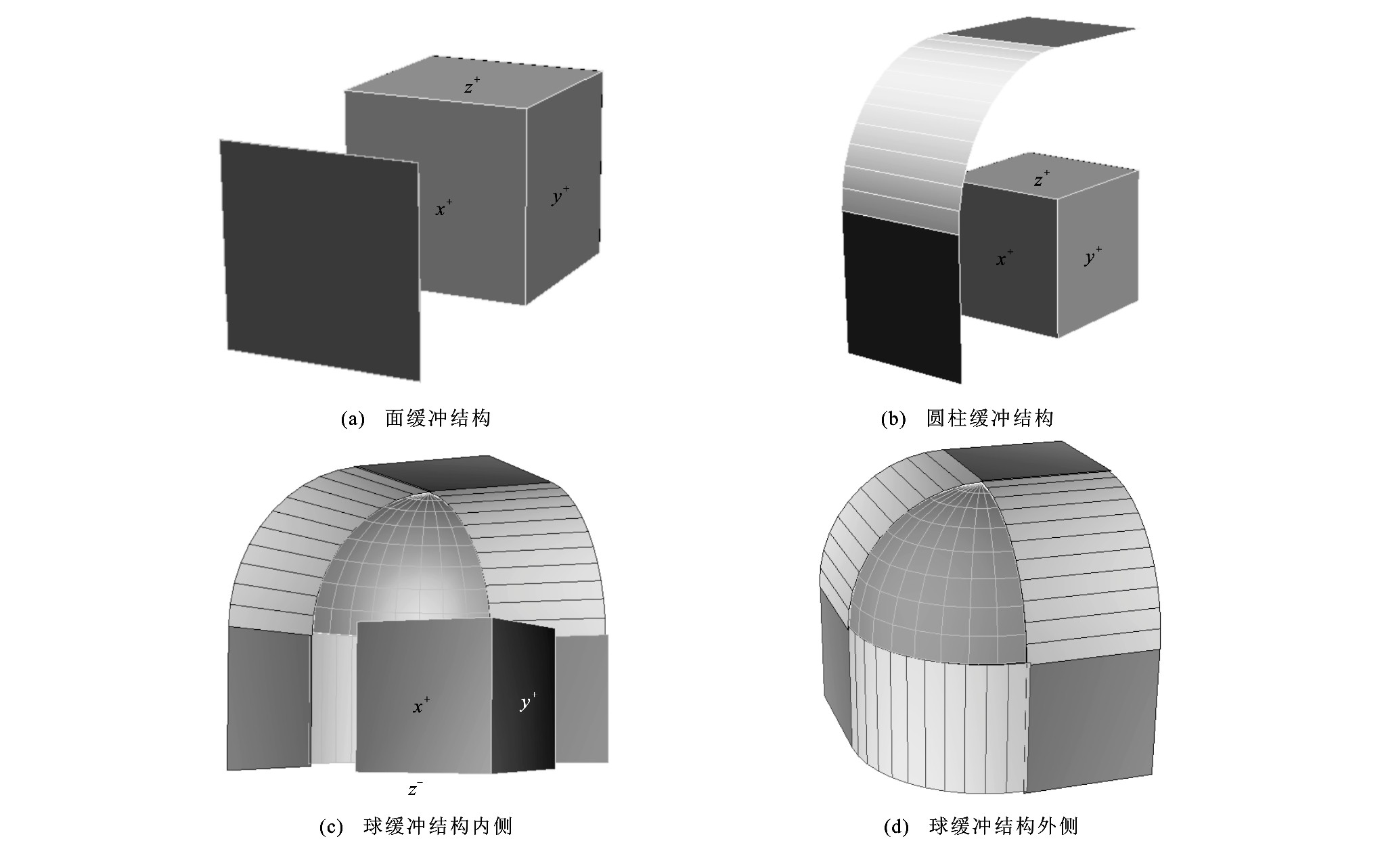
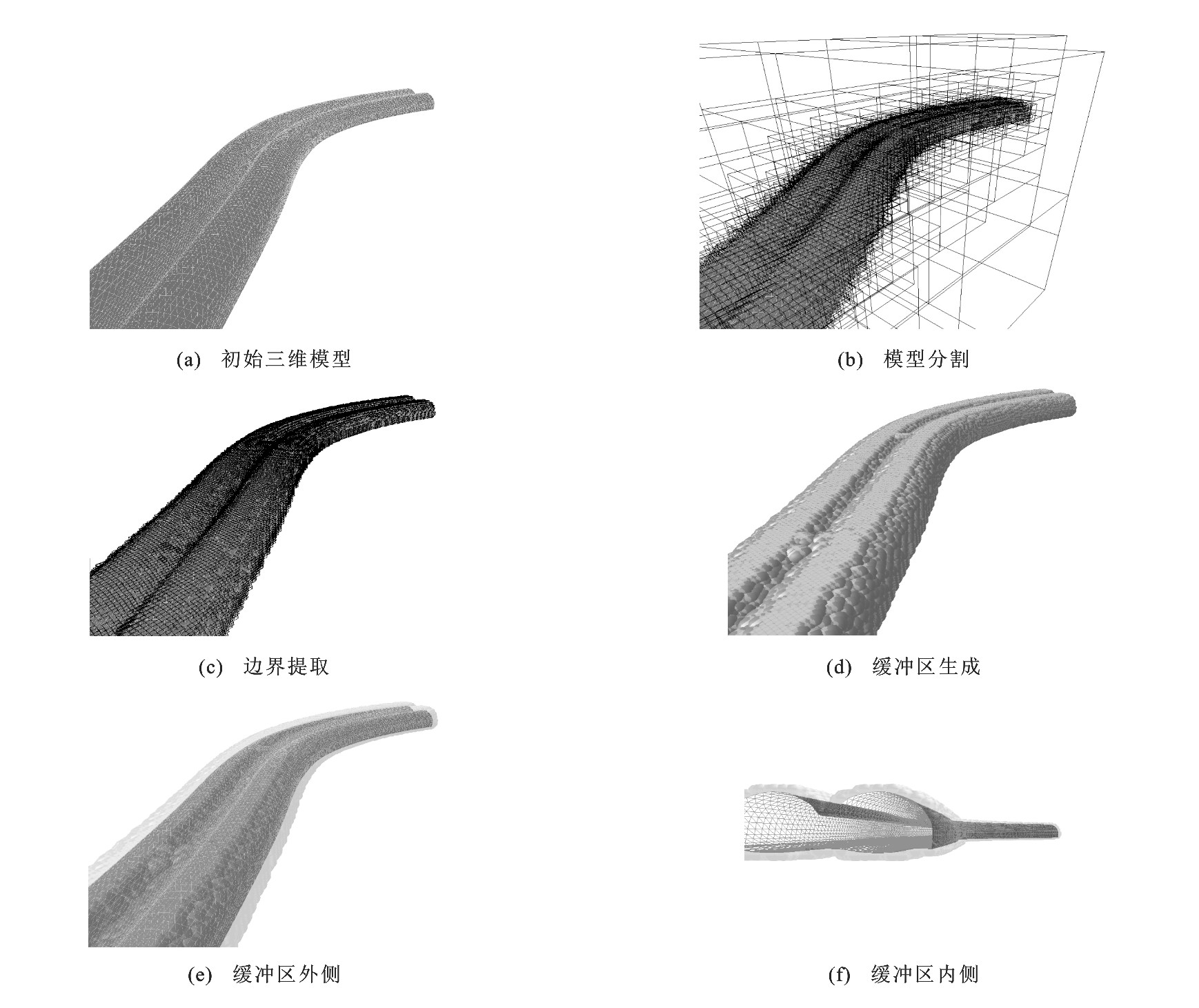
为解决现有地理信息系统无法完成城市轨道交通三维缓冲区构建的难题, 采用八叉树作为构建三维缓冲区的基础数据结构, 用线性八叉树编码储存轨道交通实体的空间结构信息, 将交通三维缓冲区分析转化为八叉树节点的空间分析。研究了八叉树节点的空间关系, 得出了一种线性八叉树邻域分析的新算法, 即0-1互换算法。运用0-1互换算法找出轨道交通的边界节点, 确定边界节点的边界方向, 由边界节点构建交通三维缓冲区, 形成了一套由线性八叉树构建城市轨道交通三维缓冲区的新方法。运用0-1互换算法对直线隧道、曲线隧道、直线高架桥、曲线高架桥等轨道交通实体模型进行边界节点提取, 并与传统算法和经典肖氏算法进行了比较。选择连拱隧道、单拱隧道和高架桥3种结构, 分别进行了三维缓冲区构建, 统计了3种结构分割的八叉树节点数量, 并与采用传统栅格结构进行三维缓冲区分析的栅格节点数量进行对比。分析结果表明: 与传统算法和经典肖氏算法相比, 0-1互换算法在对直线隧道、曲线隧道、直线高架桥、曲线高架桥4种轨道交通实体模型的边界节点提取中耗时最少, 分别为5、7、10、18ms, 将算法的时间复杂度由二次阶减少为一次阶; 基于线性八叉树的交通三维缓冲区构建方法, 对连拱隧道、单拱隧道与高架桥进行三维缓冲区构建时, 其存储空间分别为栅格结构的7.26%、3.64%、3.72%。可见, 基于线性八叉树结构的交通三维缓冲区构建方法能显著降低分析节点数量, 提高交通三维缓冲区的构建效率。
更多>
2015, 15(2): 100-108.
doi:
10.19818/j.cnki.1671-1637.2015.02.011
摘要
(
1997
)
HTML
(
732
)
PDF (2245KB)
(
1025
)
引用
(
)
多特征多阈值级联AdaBoost行人检测器
崔华
,
张骁
,
郭璐
,
袁超
,
薛世焦
,
宋焕生
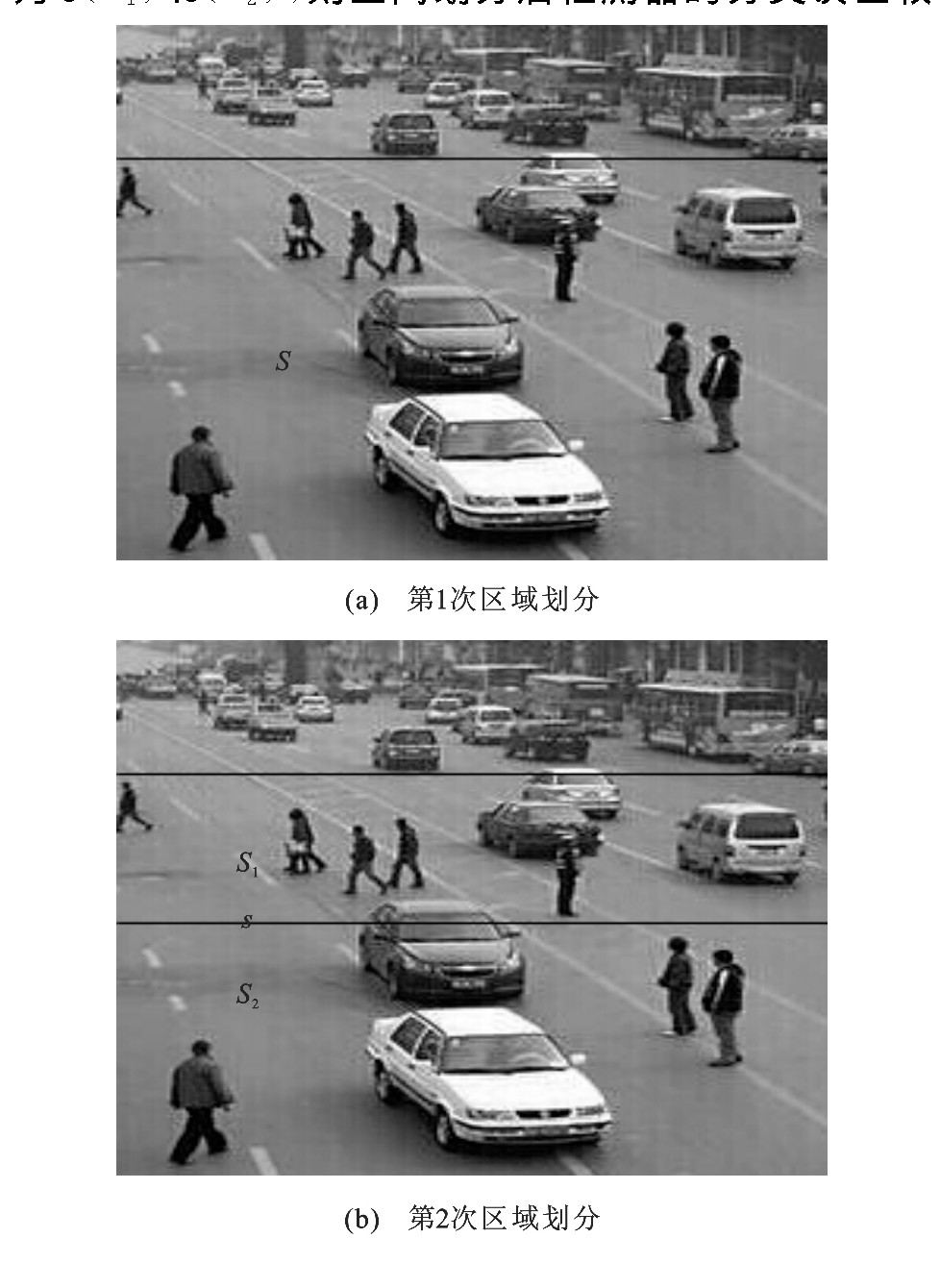
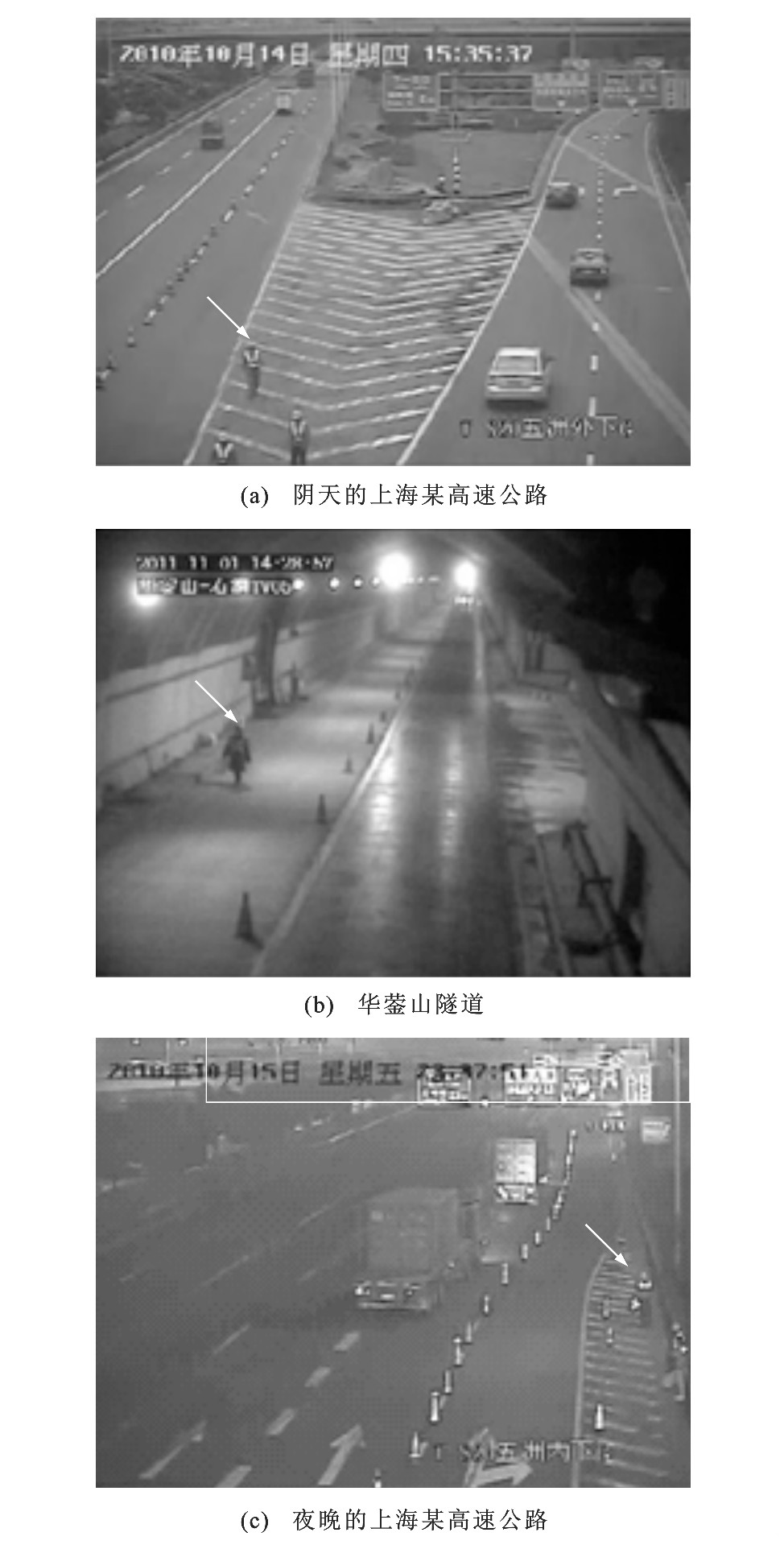
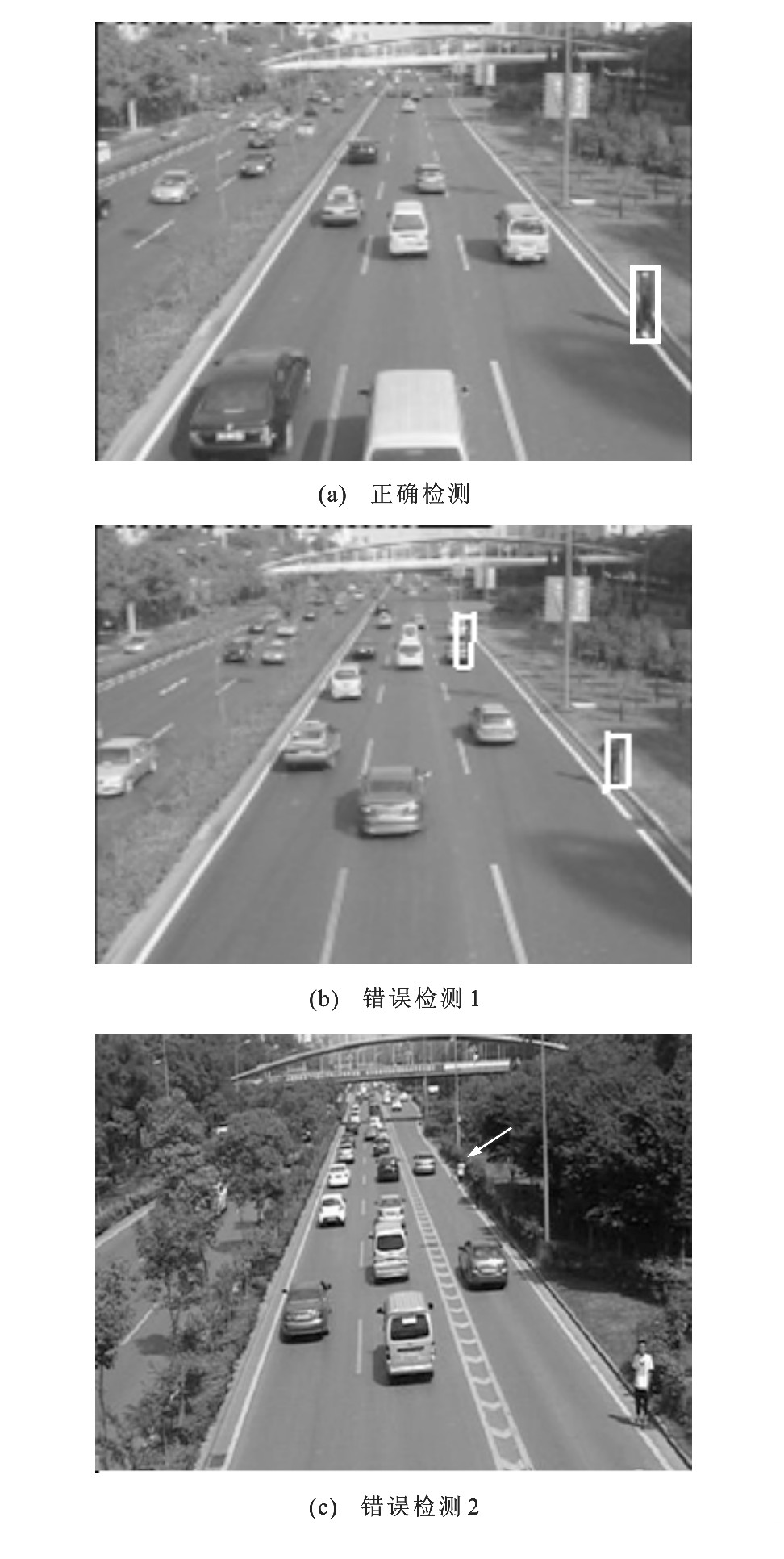
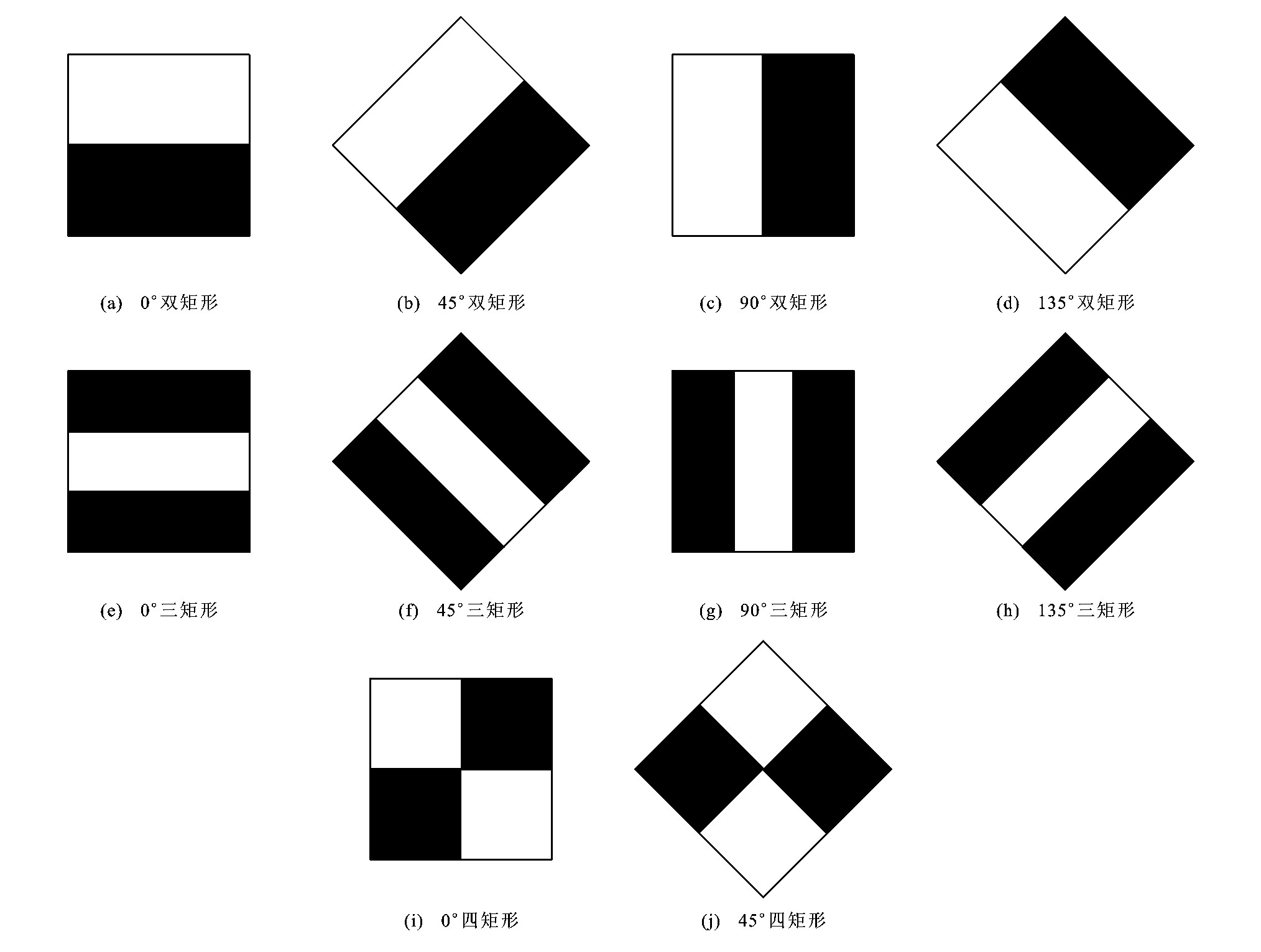
摘要:
为了满足更快、更准、更鲁棒的行人检测需求, 考虑交通监控视频图像质量不高与局部特征不明显的缺点, 采用简单的行人特征来实现行人检测。除矩形度、高宽比、轮廓复杂度、宽度比、行人面积特征外, 特定选用了对遮挡等干扰具有强鲁棒性的头部圆形度这一简单的局部特征。考虑交通监控视频图像中行人的尺寸变化, 引入区域划分策略划分图像区域。兼顾高检测率和低误检率, 根据分类误差最小原则与正样本分类率最大原则训练多个单特征多阈值AdaBoost行人检测器。为了优化多个行人检测器级联后的检测性能, 在兼顾检测性能和检测速度的基础上, 定义了以贡献率作为行人检测器的级联规则, 依据贡献率大小确定的级联次序为基于高宽比、宽度比、矩形度、行人面积、轮廓复杂度和头部圆形度的行人检测器, 依次进行级联, 建立了新的多特征多阈值级联AdaBoost行人检测器。选用3个交通场景对行人检测器进行测试, 并与单级AdaBoost行人检测器与现有2种级联AdaBoost行人检测器进行比较。分析结果表明: 在3个交通场景的检测中, 相比其他几种行人检测器, 多特征多阈值级联AdaBoost行人检测器具有较高检测率、较快的检测速度和较低误检率, 检测率最低为96.70%, 误检率最高为0.67%, 检测时间小于5s, 满足交通场景中对行人检测实时性和可靠性的要求。
更多>
2015, 15(2): 109-117.
doi:
10.19818/j.cnki.1671-1637.2015.02.012
摘要
(
1729
)
HTML
(
518
)
PDF (1438KB)
(
983
)
引用
(
)
基于多模式弱分类器的AdaBoost-Bagging车辆检测算法
王海
,
蔡英凤
,
袁朝春
摘要:
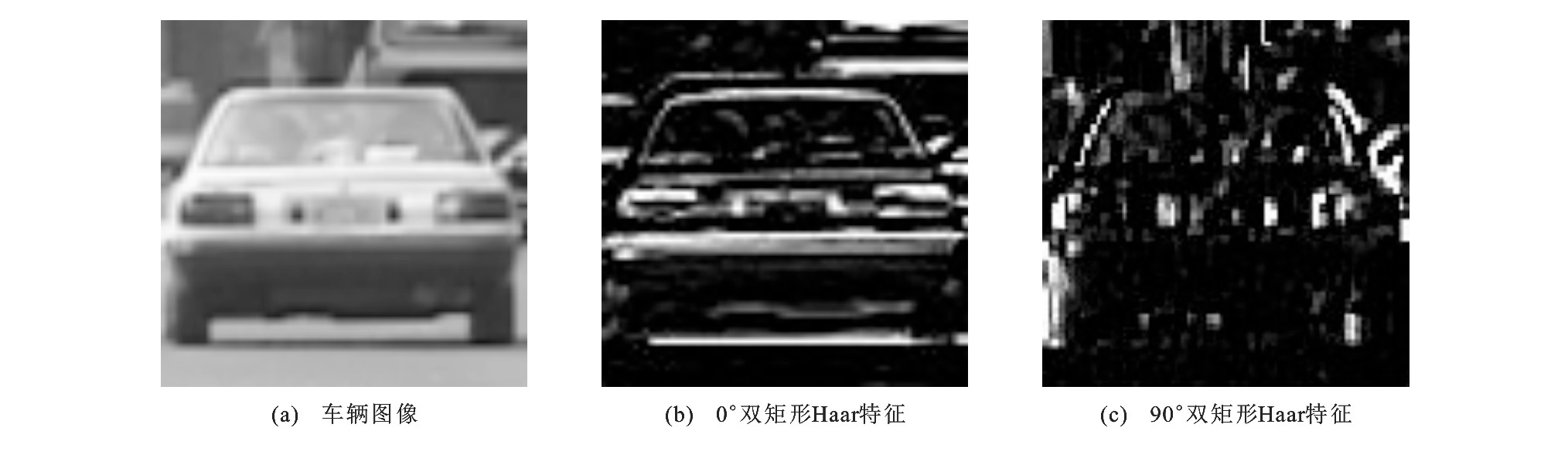
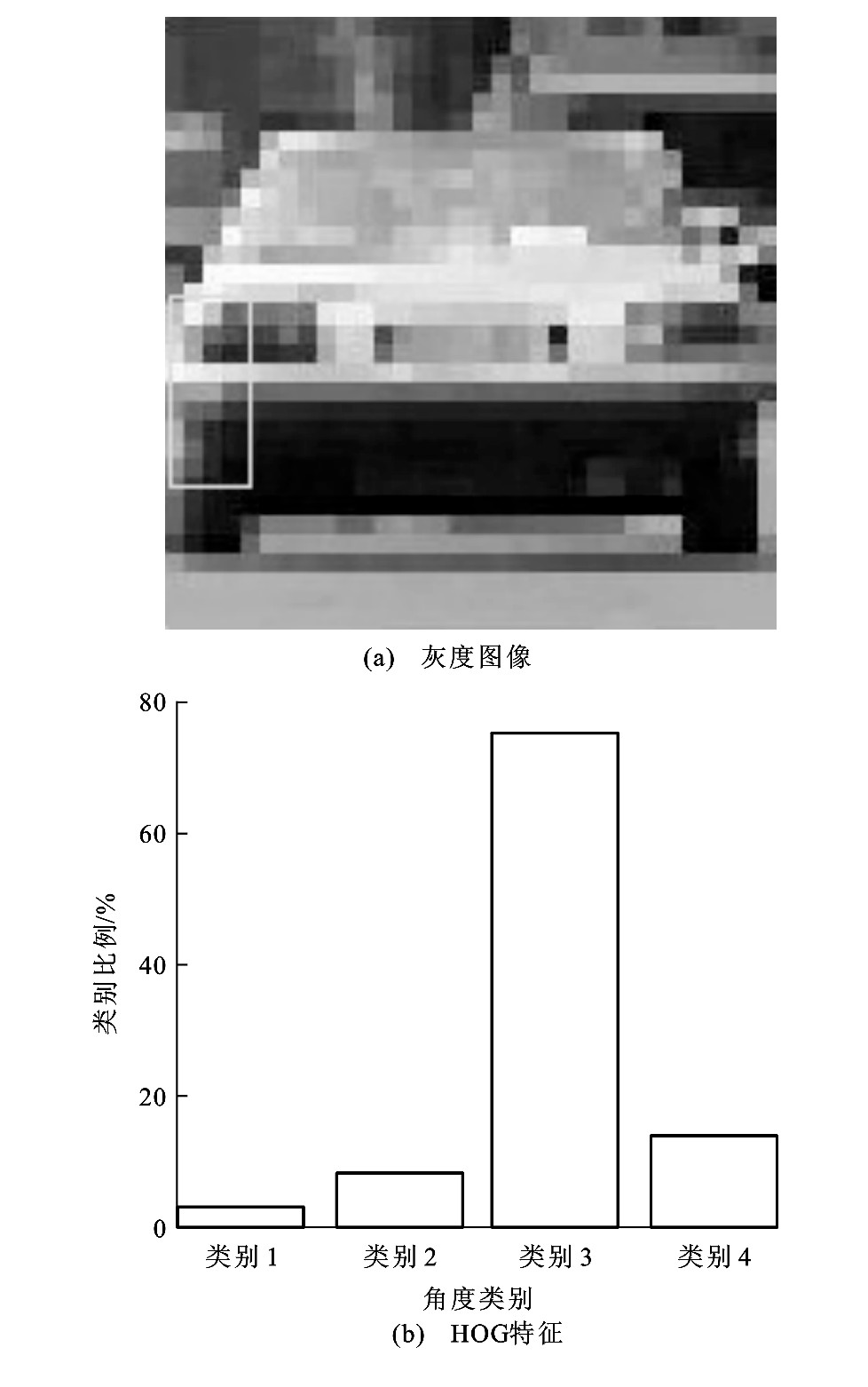
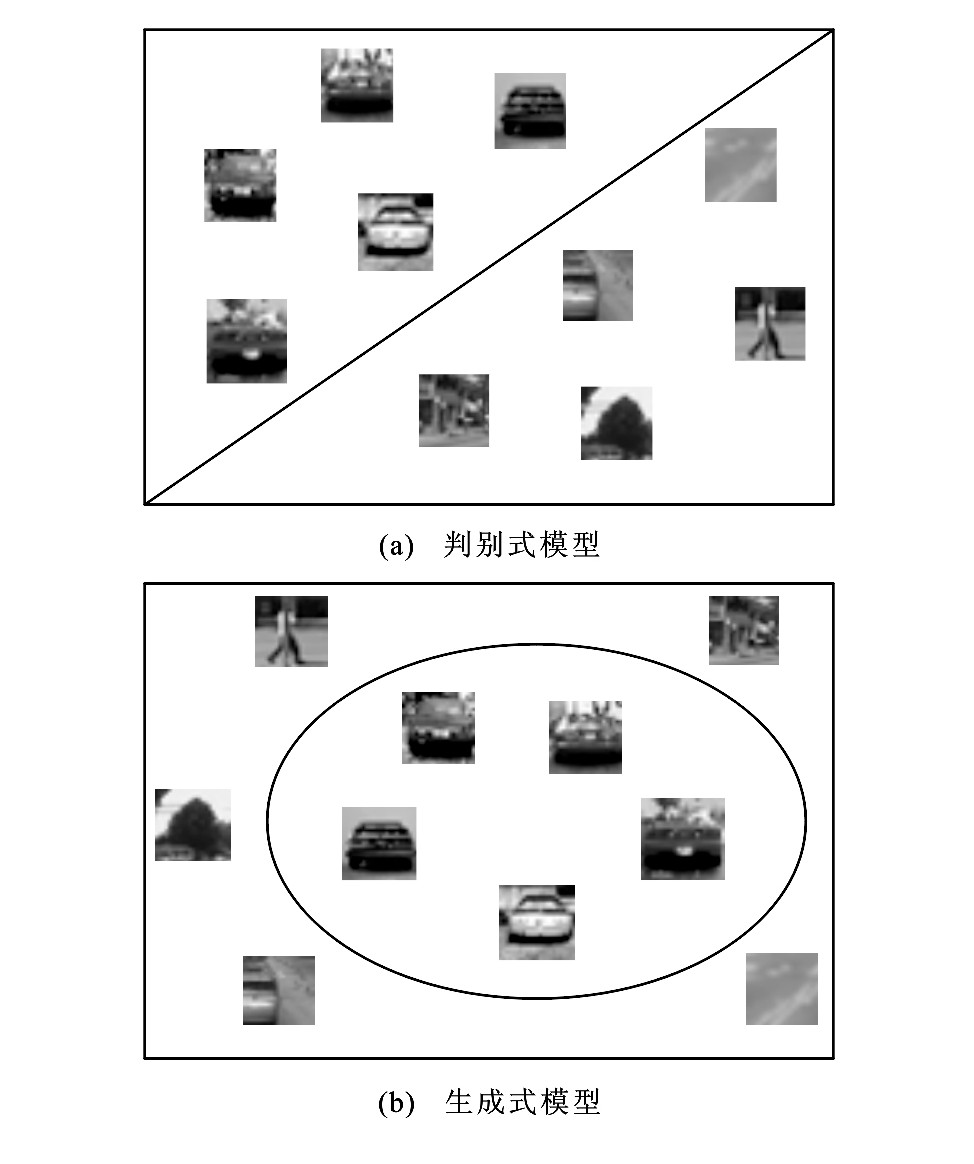
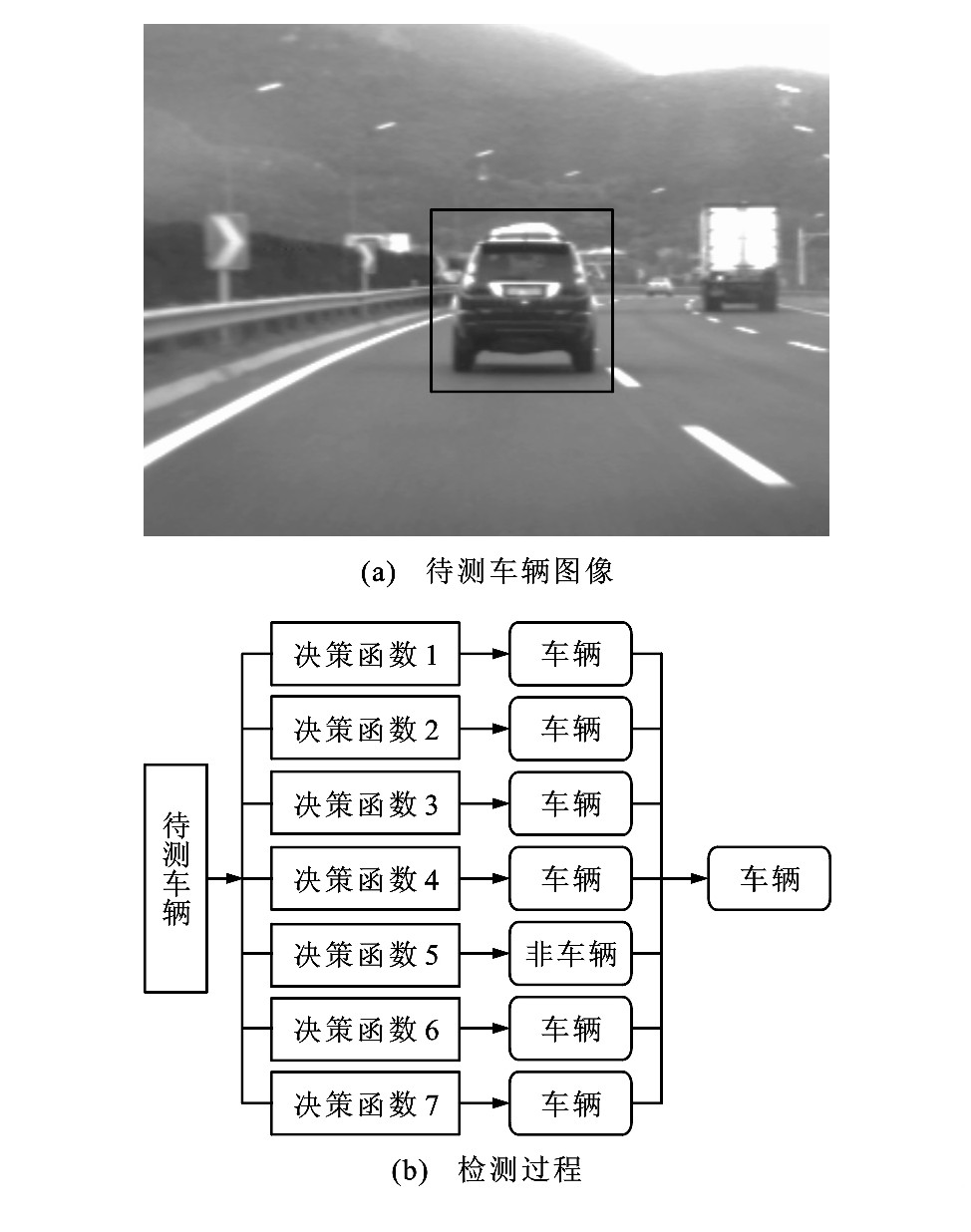
针对现有车辆检测算法在实际复杂道路情况下对车辆有效检测率不高的问题, 提出了融合多模式弱分类器, 并以AdaBoost-Bagging集成为强分类器的车辆检测算法。结合判别式模型善于利用较多的特征形成较好决策边界和生成式模型善于利用较少的特征排除大量负样本的优点, 以Haar特征训练判别式弱分类器, 以HOG特征训练生成式弱分类器, 以AdaBoost算法为桥梁, 采用泛化能力强的Bagging学习器集成算法得到AdaBoost-Bagging强分类器, 利用Caltech1999数据库和实际道路图像对检测算法进行了验证。验证结果表明: 相比于单模式弱分类器, AdaBoostBagging强分类器在分类能力和处理时间上均具有优越性, 表现为较高的检测率与较低的误检率, 分别为95.7%、0.000 27%, 每帧图像的检测时间较少, 为25ms; 与传统级联AdaBoost分类器相比, AdaBoost-Bagging强分类器虽然增加了12%的检测时间和30%的训练时间, 但检测率提升了1.8%, 误检率降低了0.000 06%;本文算法的检测性能显著优于基于Haar特征的AdaBoost分类器算法、基于HOG特征的SVM分类器算法、基于HOG特征的DPM分类器算法, 具有较佳的车辆检测效果。
更多>
2015, 15(2): 118-126.
doi:
10.19818/j.cnki.1671-1637.2015.02.013
摘要
(
1115
)
HTML
(
275
)
PDF (2107KB)
(
1168
)
引用
(
)
文章推荐
更多>
低空无人机物流公众接受度研究综述
智能飞行汽车:驱动未来城市空中交通
无人驾驶航空器自主探测与避让技术研究综述
铁道车辆齿轮箱动力学与故障诊断研究综述
FMEA/FMECA在船舶工程中的应用综述
关键词检索
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
期刊检索
2026年
2025年
2024年
2023年
2022年
2021年
2020年
2019年
2018年
2017年
2016年
2015年
2014年
2013年
2012年
2011年
2010年
2009年
2008年
2007年
2006年
2005年
2004年
2003年
2002年
2001年
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
期刊动态
更多>
翟婉明院士莅临《交通运输工程学报》轨道交通方向青年编委会会议,指导办刊工作
《交通运输工程学报》“大宗固废在交通运输工程中的资源化利用”专刊征稿
《交通运输工程学报》“航空运输业与航空制造业融合下的前沿技术、装备与系统”专刊征稿
《交通运输工程学报》“水路交通智能技术与装备”专刊征稿
学报动态
《交通运输工程学报》“多年冻土区交通基础设施韧性提升技术” 专刊征稿启事
作者园地
更多>
关于文章中的中国地图
中图分类号
友情链接
更多>
《工程索引》(Ei Compendex)
《斯高帕斯数据库》(Scopus)
交通运输工程学报(CNKI)
长安大学学术期刊管理中心
交通运输工程学报(英文)
中国公路学报
×
Close
导出文件
文件类别
RIS(可直接使用Endnote编辑器进行编辑)
Bib(可直接使用Latex编辑器进行编辑)
Txt
引用内容
引文——仅导出文章的Citation信息
引文和摘要——导出文章的Citation信息和文章摘要信息
×
Close
引用参考文献格式