首页
期刊简介
编委会
期刊在线
网络首发
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
出版伦理
AI使用声明
投稿模板
版权转让协议
期刊订阅
联系我们
编辑团队
联系方式
English
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
首页
期刊简介
编委会
期刊在线
网络首发
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
出版伦理
AI使用声明
投稿模板
版权转让协议
期刊订阅
联系我们
编辑团队
联系方式
English
留言板
尊敬的读者、作者、审稿人, 关于本刊的投稿、审稿、编辑和出版的任何问题, 您可以本页添加留言。我们将尽快给您答复。谢谢您的支持!
姓名
邮箱
手机号码
标题
留言内容
验证码
用户中心
作者投稿
作者查询
专家审稿
编辑办公
期刊信息
(2001年创刊 月刊 )
主 管:
中华人民共和国教育部
主 办:
长安大学
编辑出版:
《交通运输工程学报》编辑部
主 编:
沙爱民
地 址:
陕西省 西安市 南二环 路中段 长安大学《交通运输工程学报》编辑部
邮 编:
710064
电 话:
029-82334388
邮 箱:
jygc@chd.edu.cn
国内发行:
中国邮政集团有限公司陕西省报刊发行局
国外发行:
中国国际图书贸易集团有限公司
标准刊号:
ISSN
1671-1637
CN
61-1369/U
CODEN
JYGXAS
学报微信视频号
学报微信公众号
重要源期刊收录
更多>
《交通运输工程学报》收录信息
《铁路运输领域高质量科技期刊分级目录》T1级
《公路运输领域高质量科技期刊分级目录》T1级
美国《工程索引》(Ei Compendex)
《文摘和引文数据库》(Scopus)
日本科学技术振兴机构(JST)中国文献数据库
邮件订阅
RSS
2015年 第15卷 第4期
栏目
道路与铁道工程
载运工具运用工程
交通运输规划与管理
交通信息工程及控制
上一期
|
下一期
选择全部
显示方式:
道路与铁道工程
煤直接液化残渣对沥青胶浆黏弹性能的影响
季节
,
石越峰
,
索智
,
姚辉
,
徐世法
摘要:
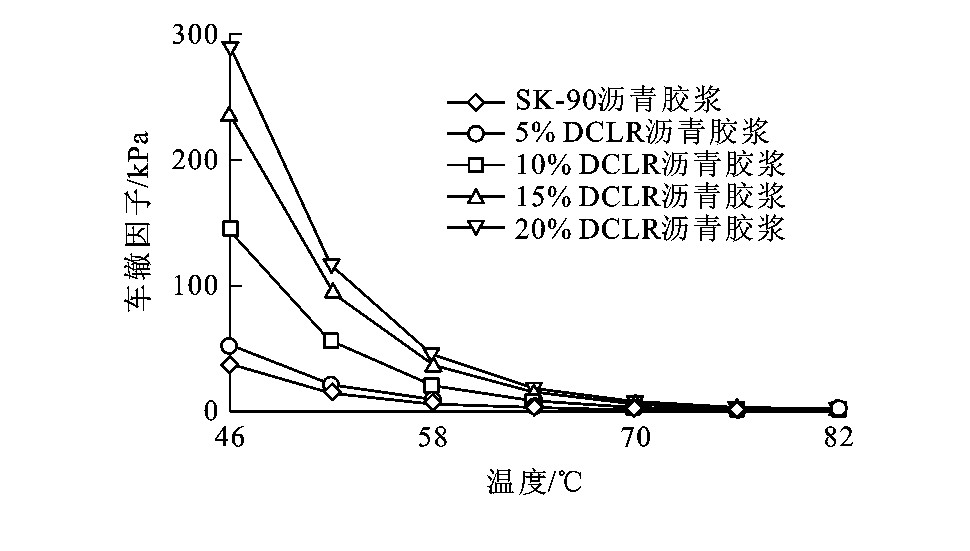
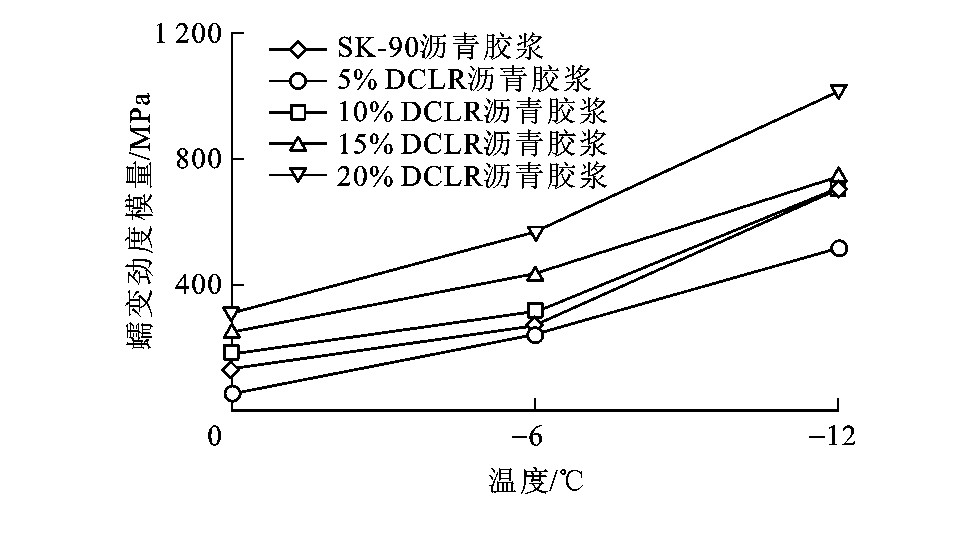
以SK-90沥青为基质沥青, 分别制备粉胶比为1.0、煤直接液化残渣(DCLR)掺量(质量分数)分别为5%、10%、15%、20%下的DCLR改性沥青胶浆和SK-90沥青胶浆。采用动态剪切流变试验和弯曲梁流变试验, 对比分析了DCLR对沥青胶浆车辙因子、疲劳因子、蠕变劲度模量和蠕变速率等因素的影响, 揭示了DCLR对沥青胶浆黏弹性能的影响规律。试验结果表明: DCLR会显著增强沥青胶浆的高温性能, 降低沥青胶浆的低温性能和疲劳性能; DCLR提高了沥青胶浆在高温条件下的弹性及在低温条件下的黏性; 在高DCLR掺量下, 沥青胶浆的高温、低温和疲劳性能对温度的敏感度极为显著; 随着DCLR掺量的增加, 沥青及胶浆的适用范围越来越窄; 从应用角度考虑, 建议DCLR掺量不宜大于10%, 沥青及胶浆可适用于沥青路面的中面层。
更多>
2015, 15(4): 1-8.
doi:
10.19818/j.cnki.1671-1637.2015.04.001
摘要
(
1784
)
HTML
(
409
)
PDF (390KB)
(
965
)
引用
(
)
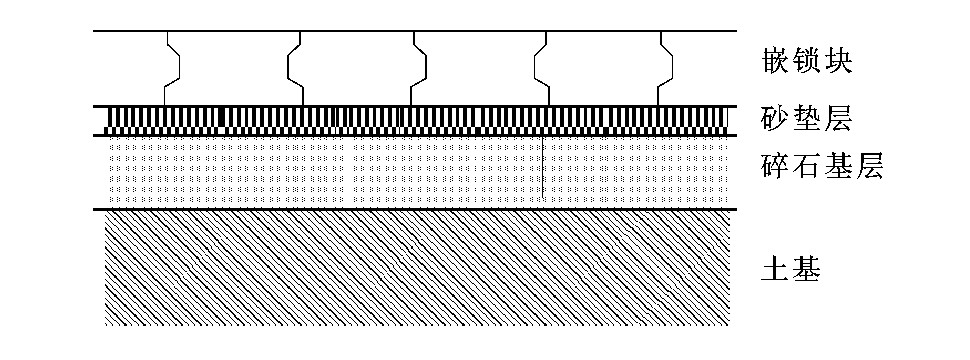
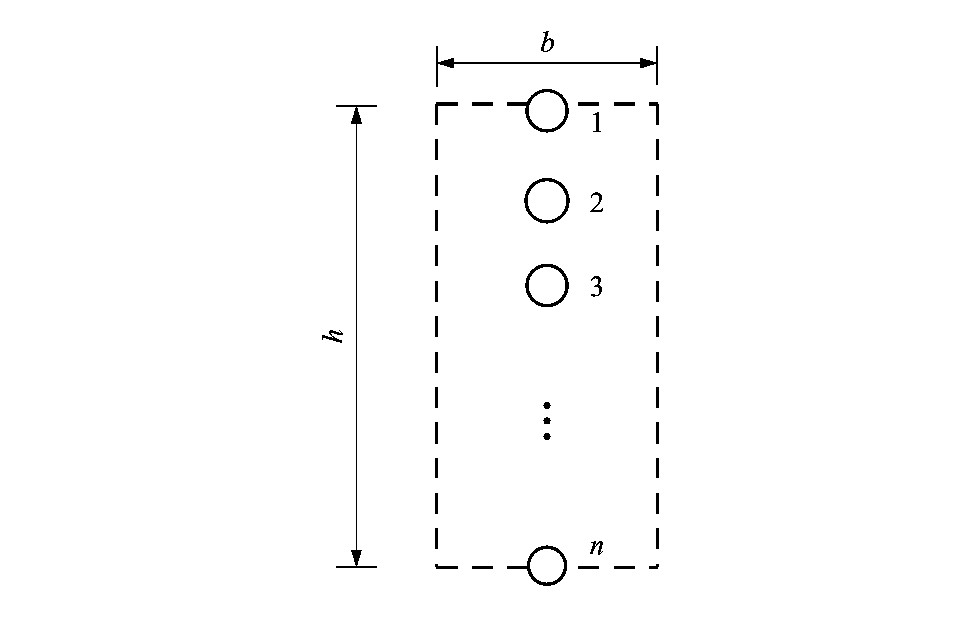
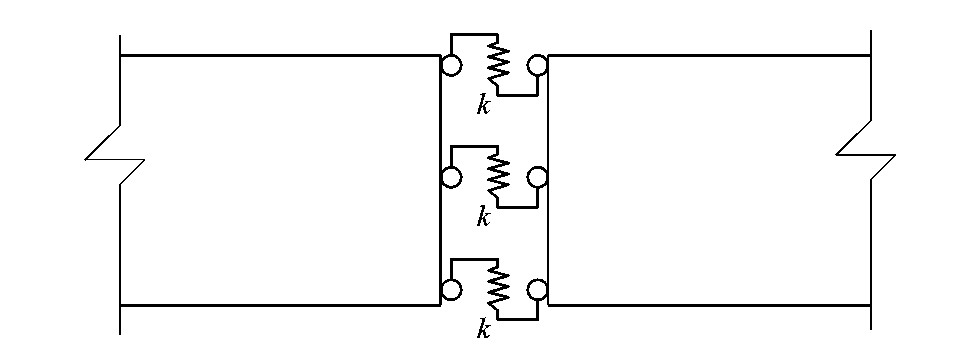
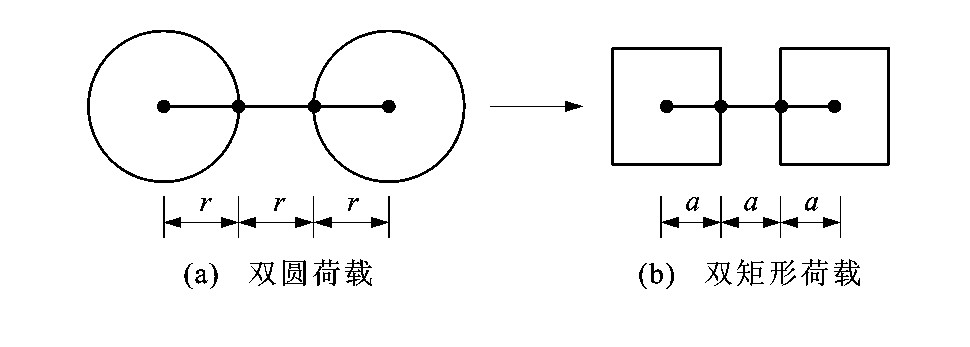
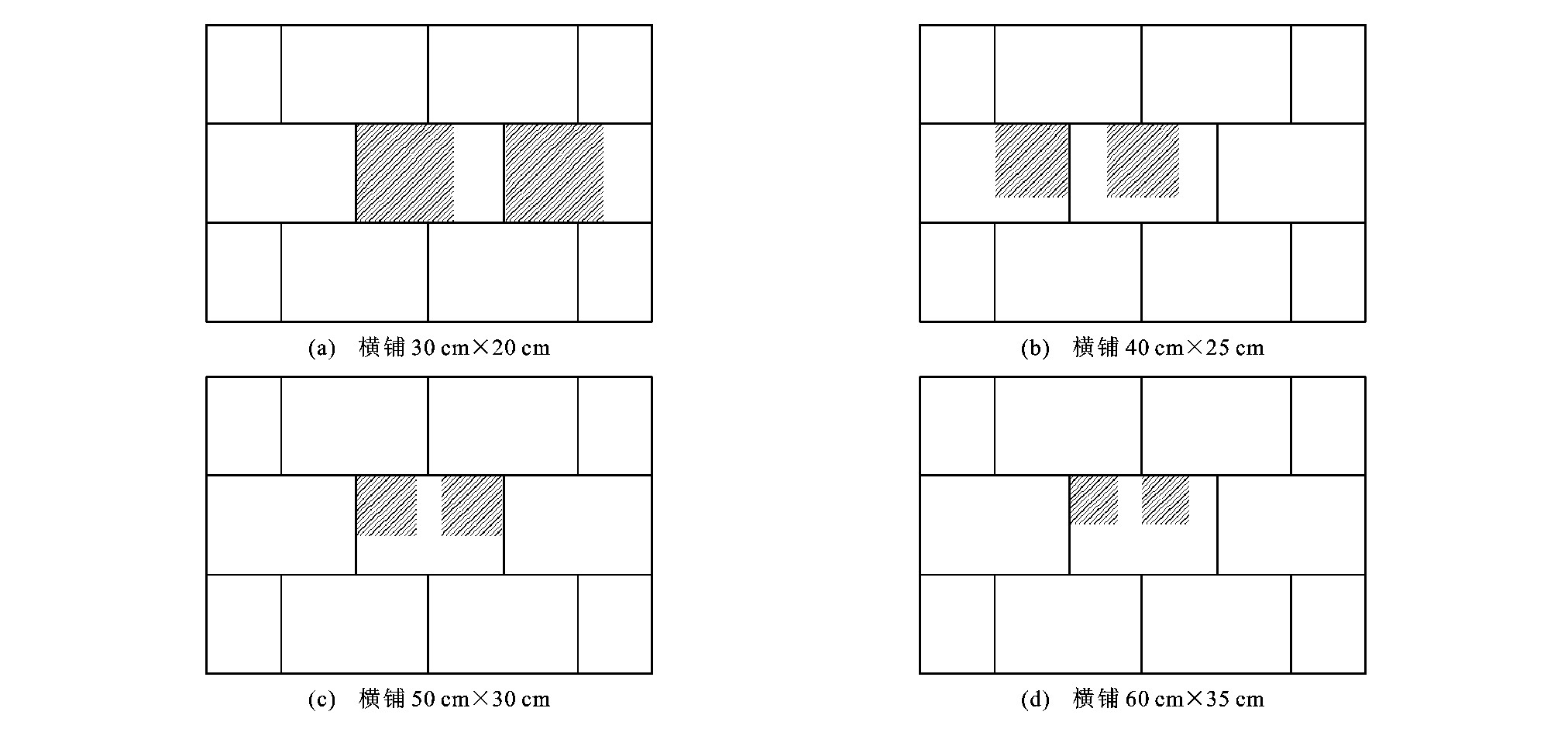
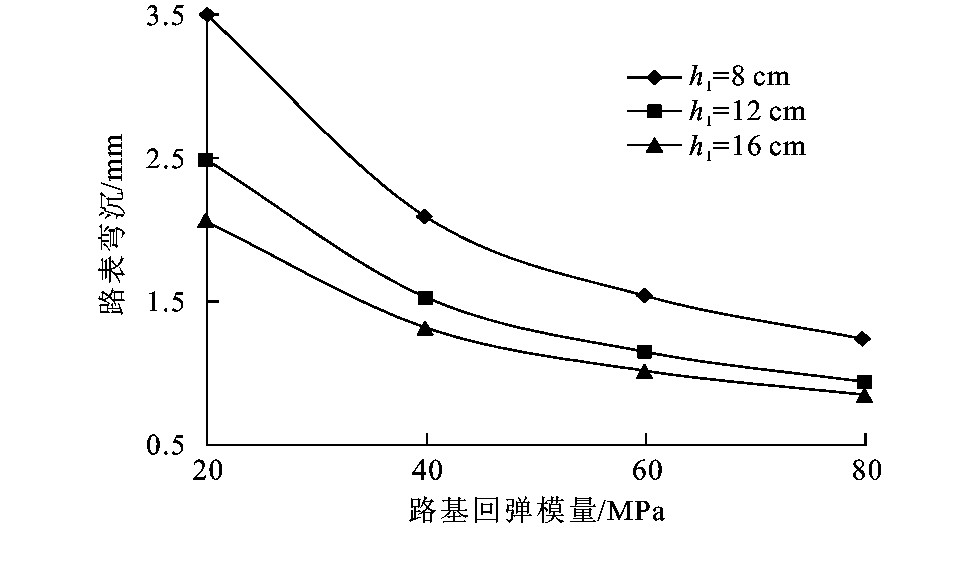
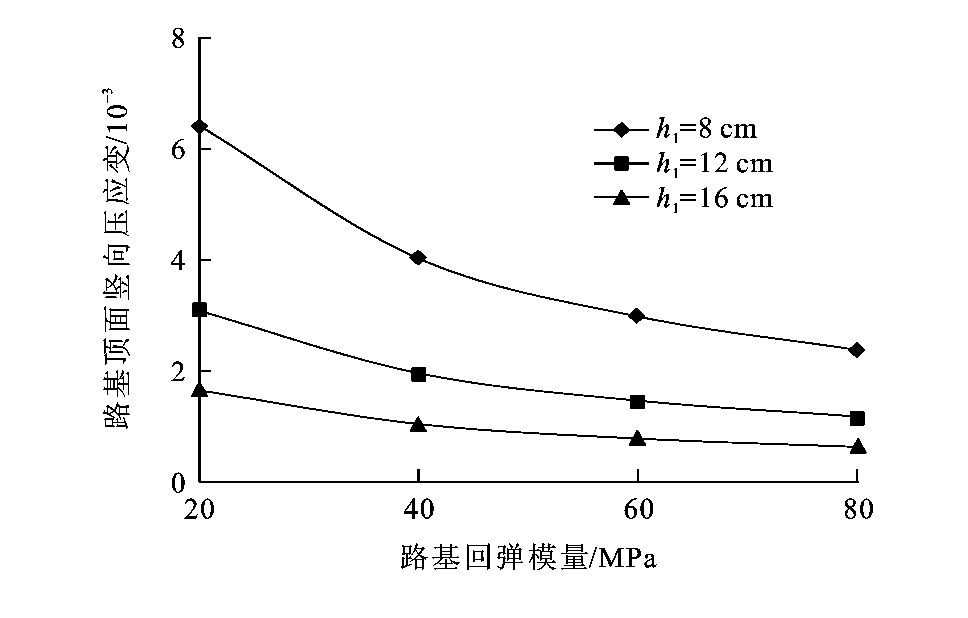
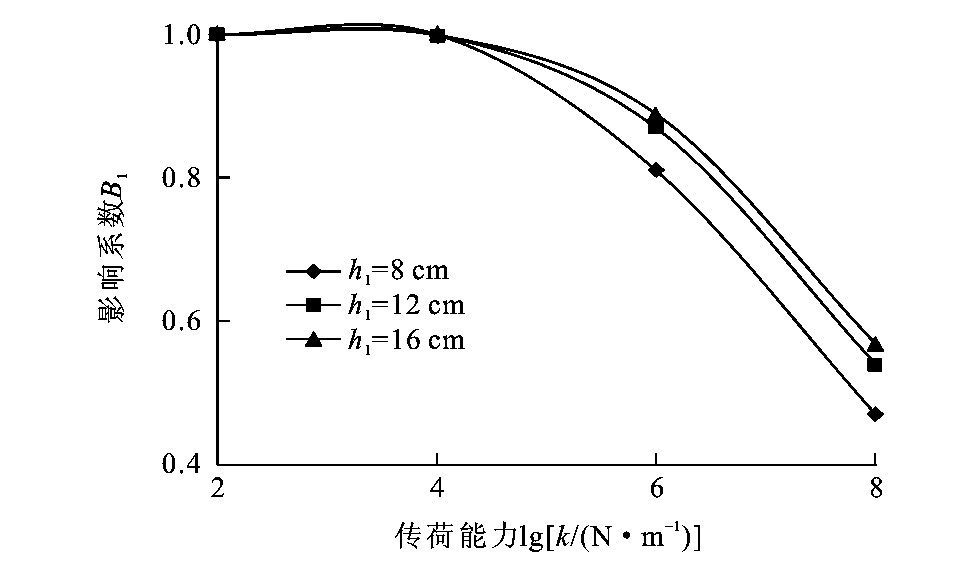
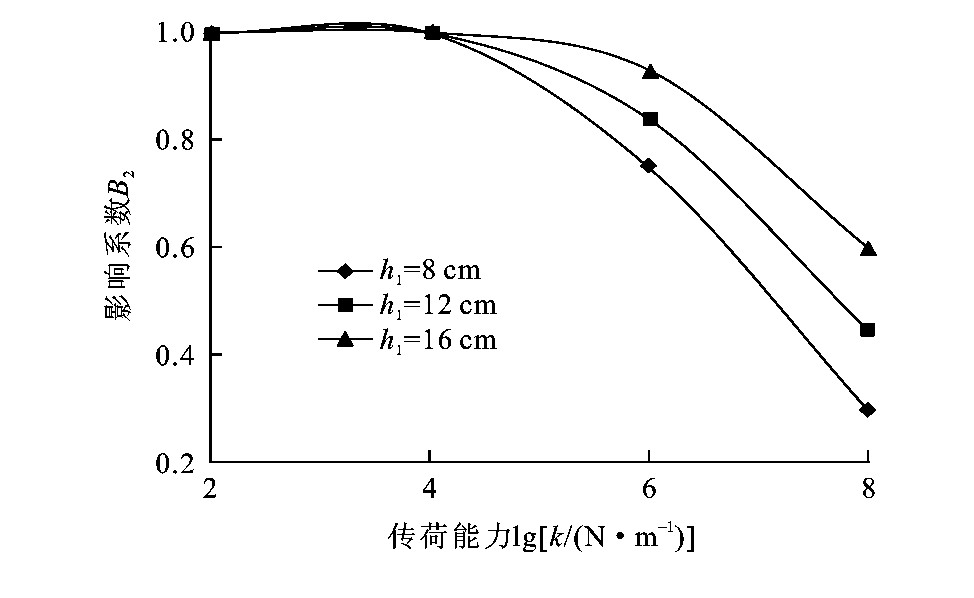
嵌锁块路面受力特性与设计方法
单景松
,
李惠
,
蒋含莞
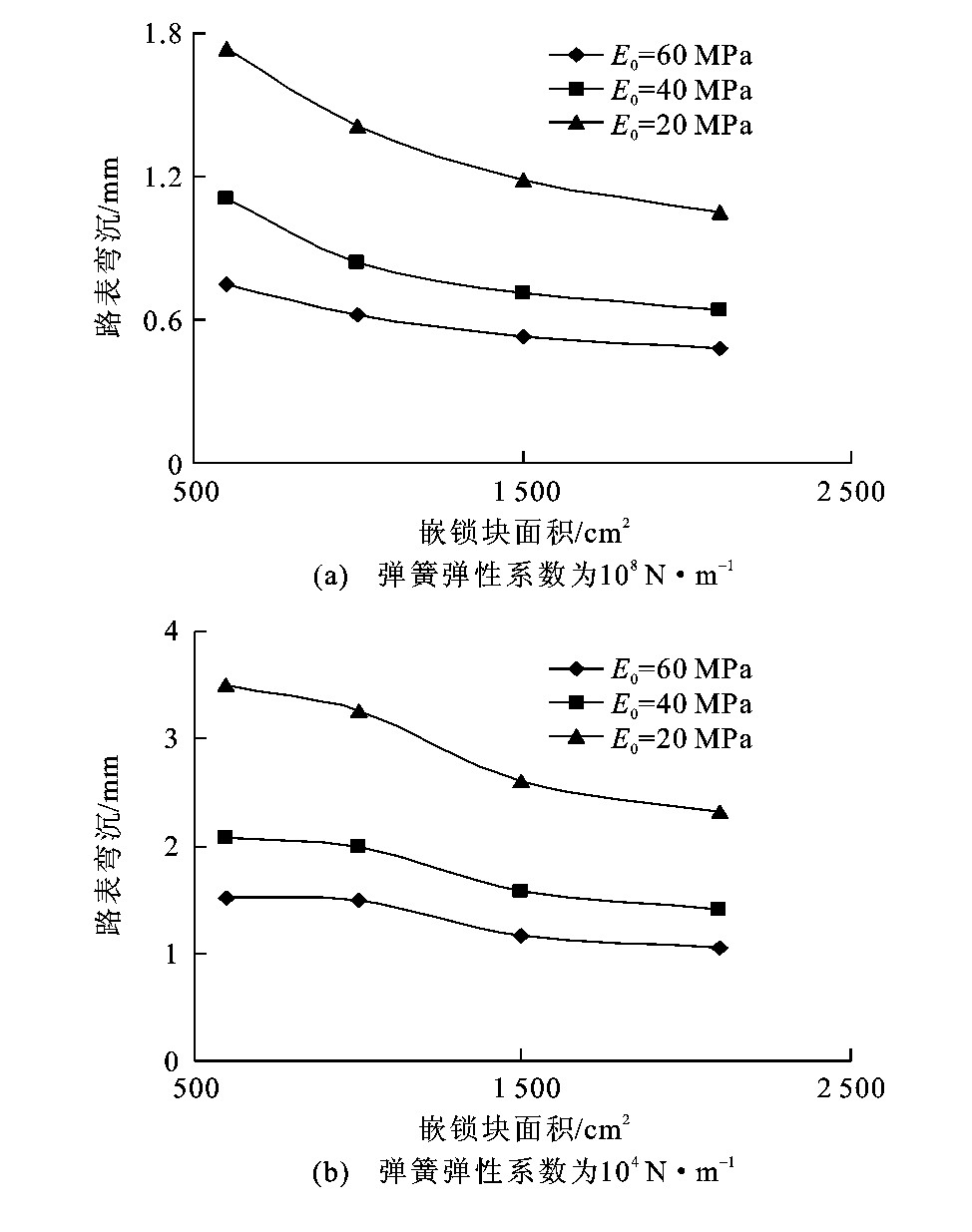
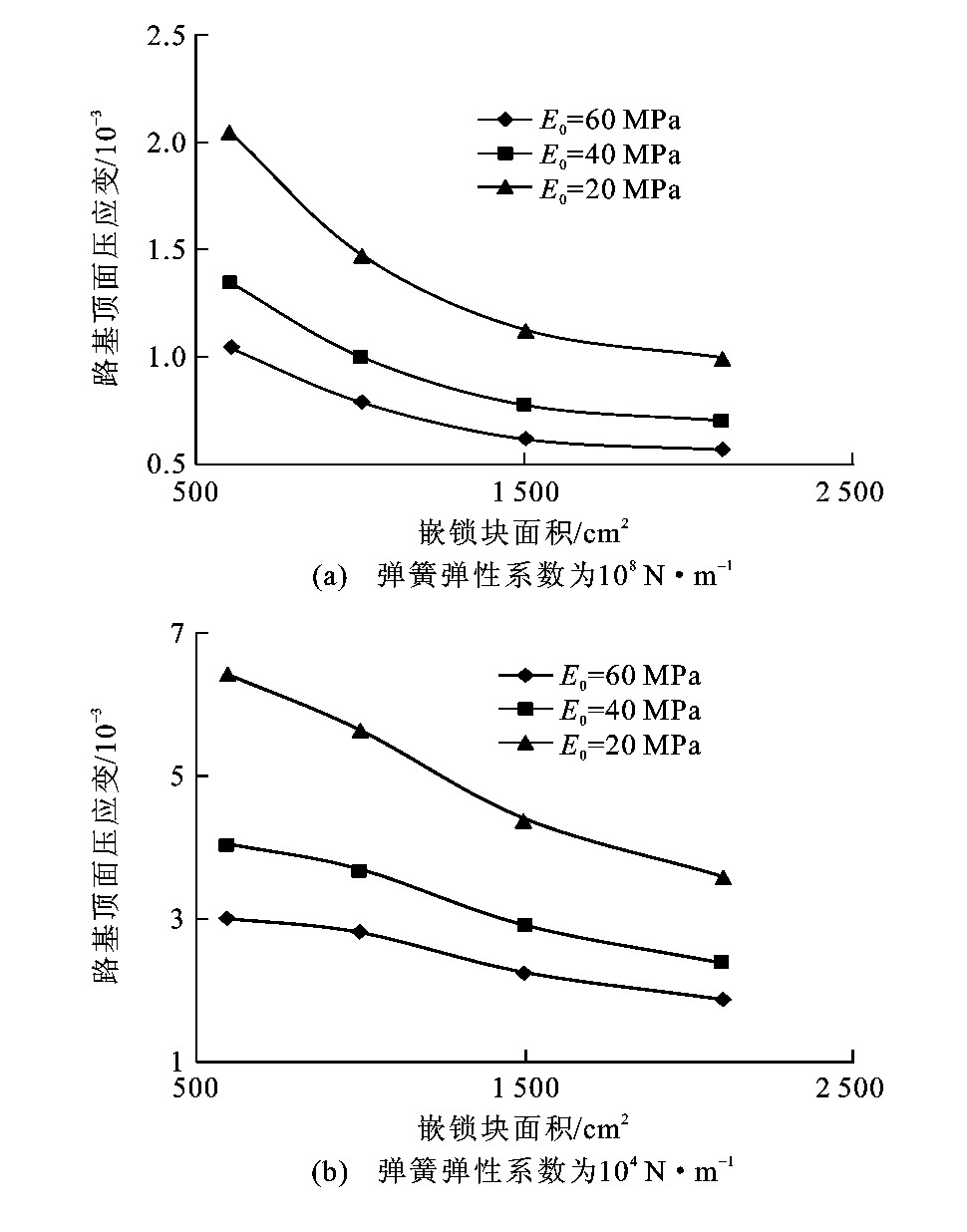
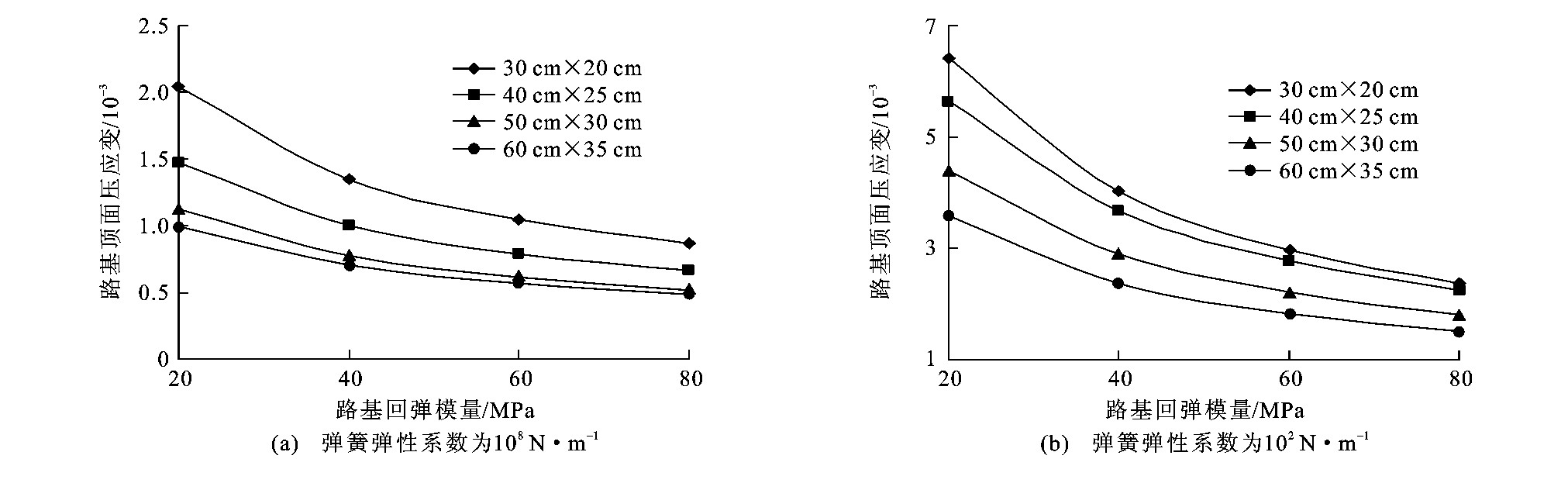
摘要:
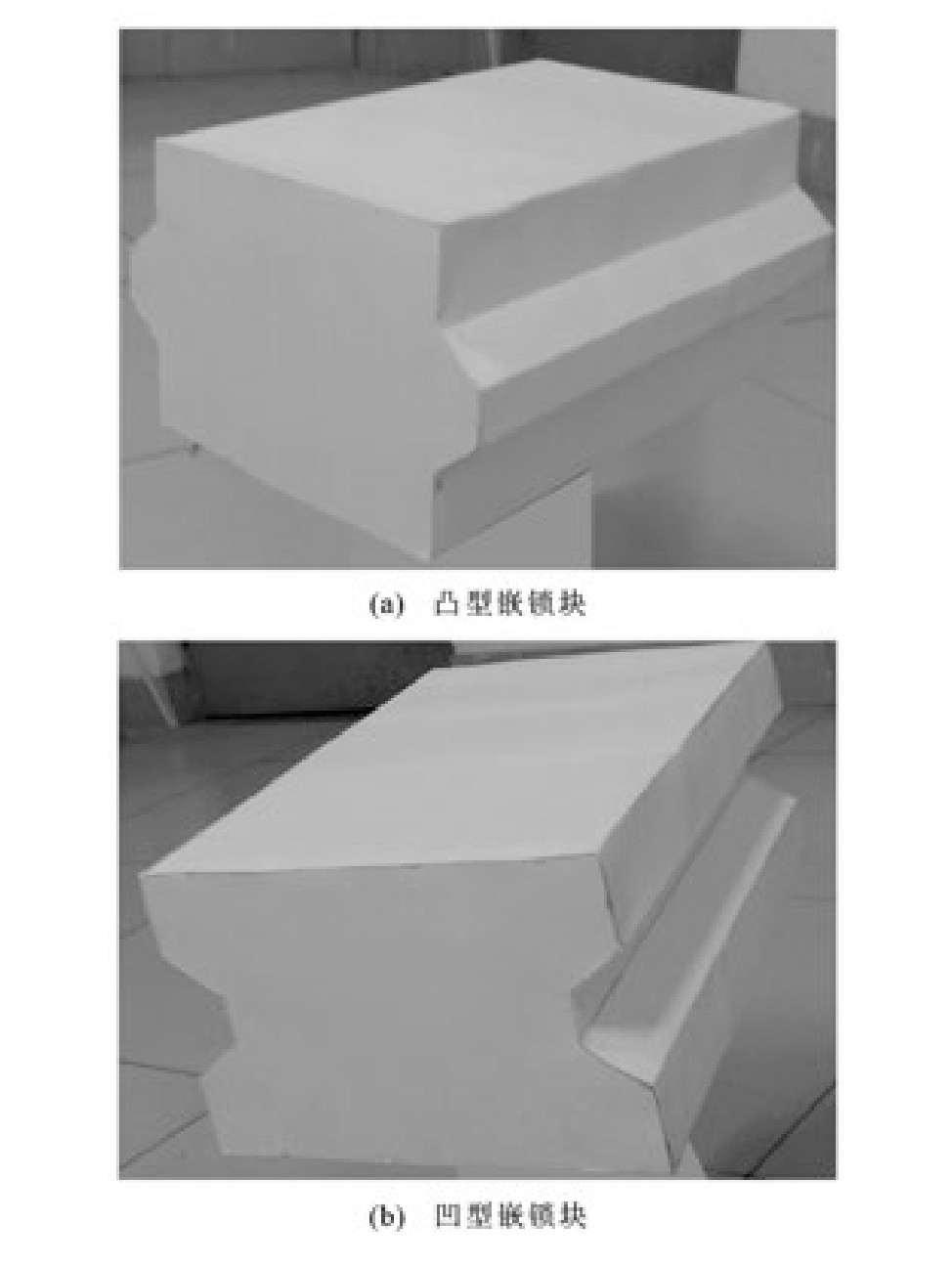
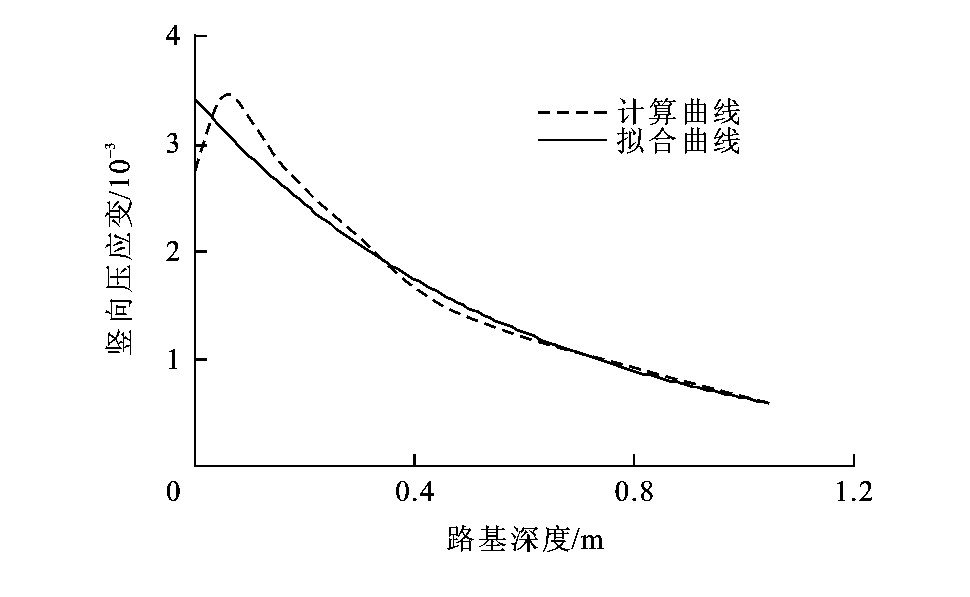
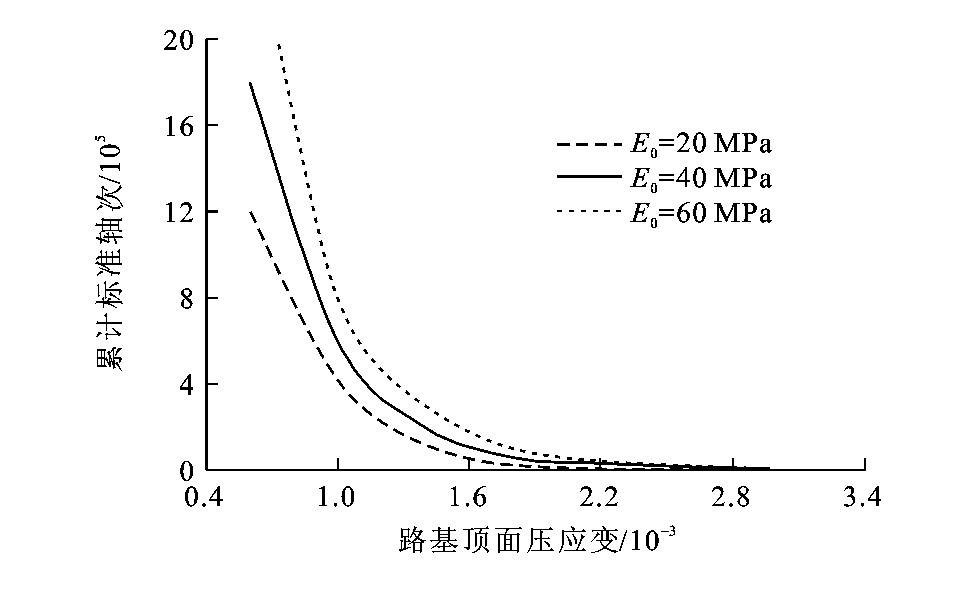
为了提高传统路面嵌锁块尺寸与嵌锁块竖向嵌锁能力, 开发了大尺寸企口连接嵌锁块, 分析了其受力特性。以有限元方法建立了嵌锁块路面整体模型, 以弹簧单元模拟嵌锁块间传荷能力, 分析了嵌锁块尺寸、嵌锁块传荷能力、碎石基层厚度与路基强度对路表弯沉和路基顶面竖向压应变的影响。以路基顶面永久应变为控制指标, 建立了路基顶面应变水平与标准累计轴次的关系。计算结果表明: 在相同地基和基层条件下, 嵌锁块尺寸由30cm×20cm增大到50cm×30cm时, 路表弯沉可减小25%~30%, 路基顶面压应变可减小25%~45%。当接缝弹簧弹性系数由102 N·m
-1
增加至108 N·m
-1
时, 路表弯沉降低50%~55%, 路基顶面压应变降低65%~75%。可见, 采用较大尺寸的嵌锁块与加强嵌锁块的传荷能力对提升路面性能有显著作用, 路面设计时应依据道路的交通水平查图确定路基顶面的压应变水平, 据此确定合理的基层厚度和嵌锁块尺寸, 使路基顶面竖向压应变满足要求。
更多>
2015, 15(4): 9-17.
doi:
10.19818/j.cnki.1671-1637.2015.04.002
摘要
(
1802
)
HTML
(
573
)
PDF (570KB)
(
958
)
引用
(
)
不同除冰工艺对机场水泥混凝土道面的损伤特性
赵方冉
,
杜拾妹
,
刘新琛
,
安文波
,
徐小磊
摘要:
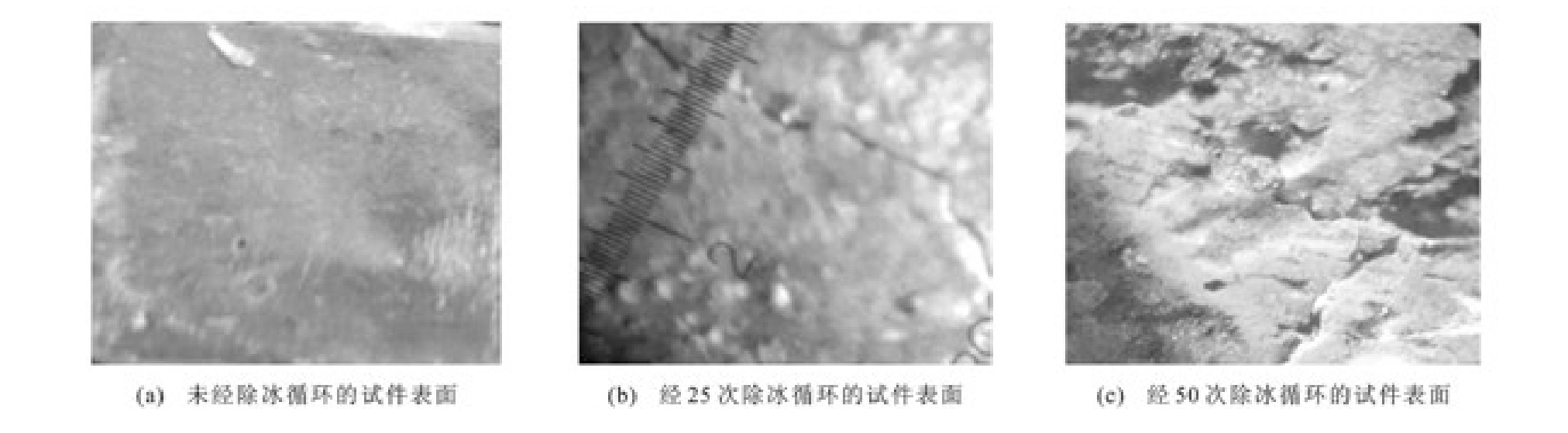
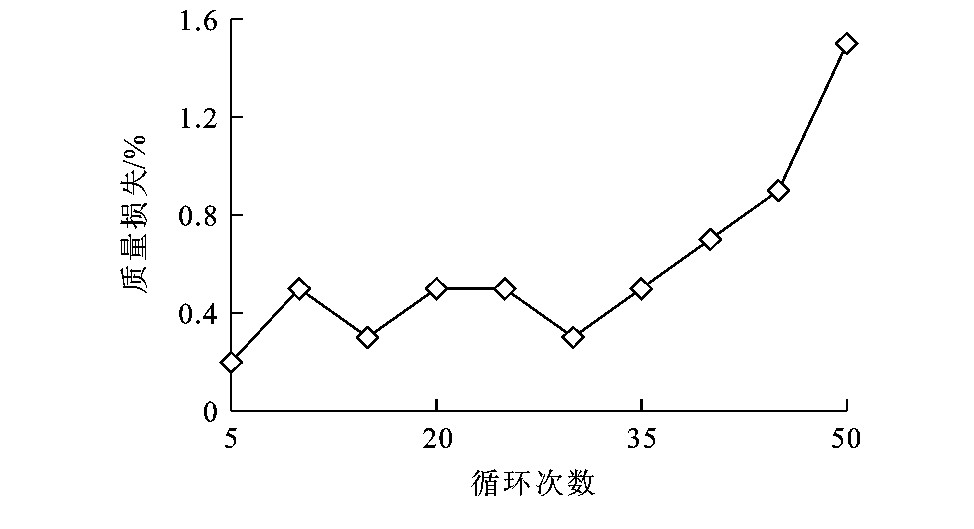
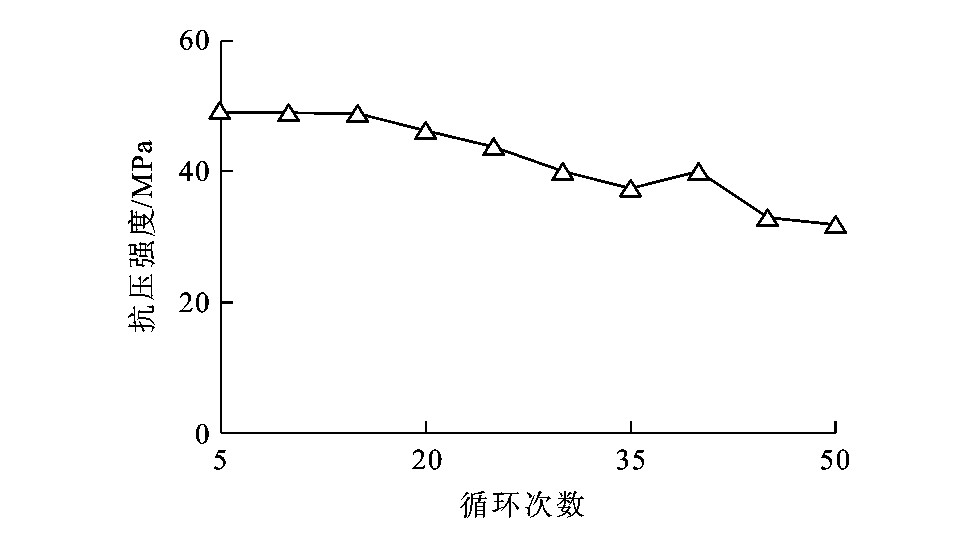
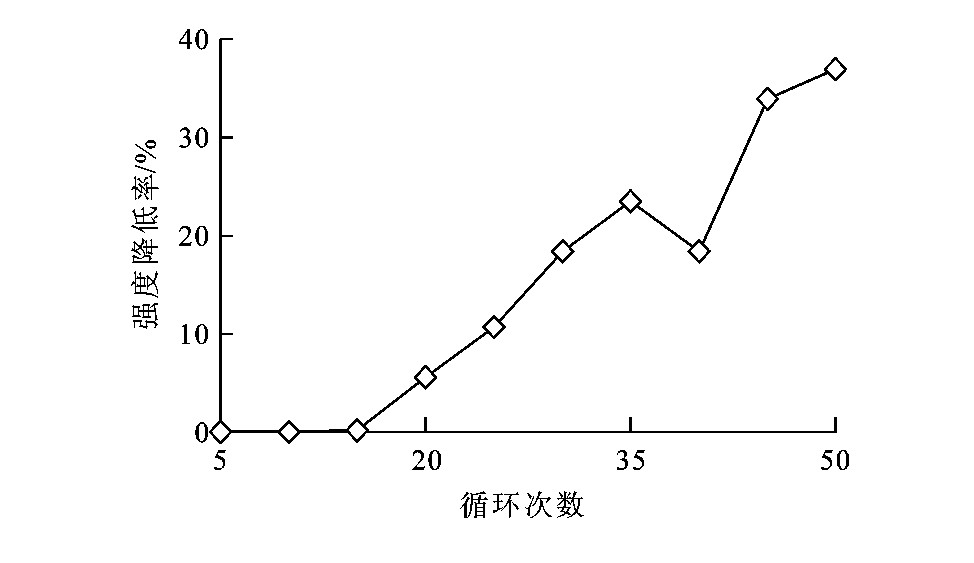
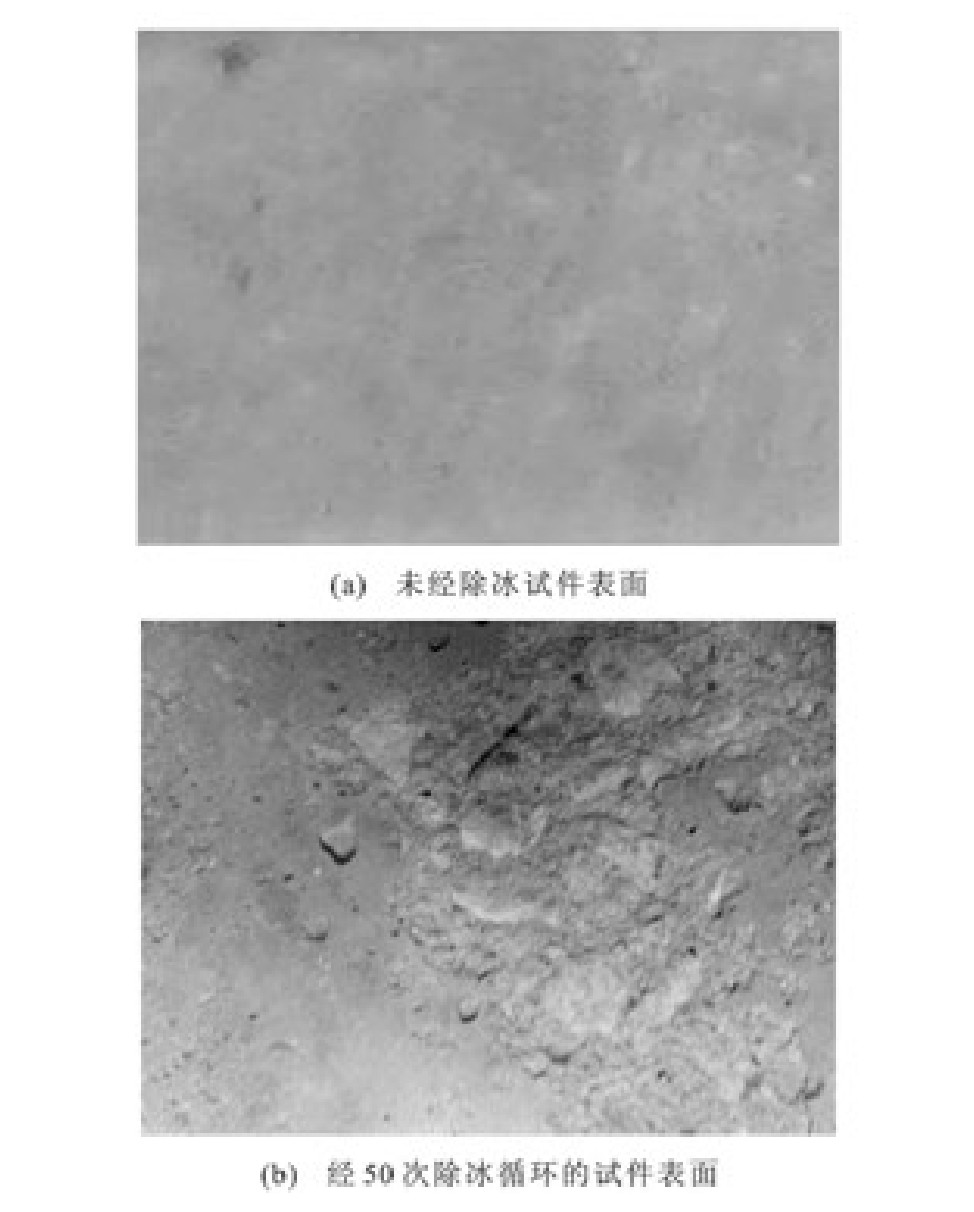
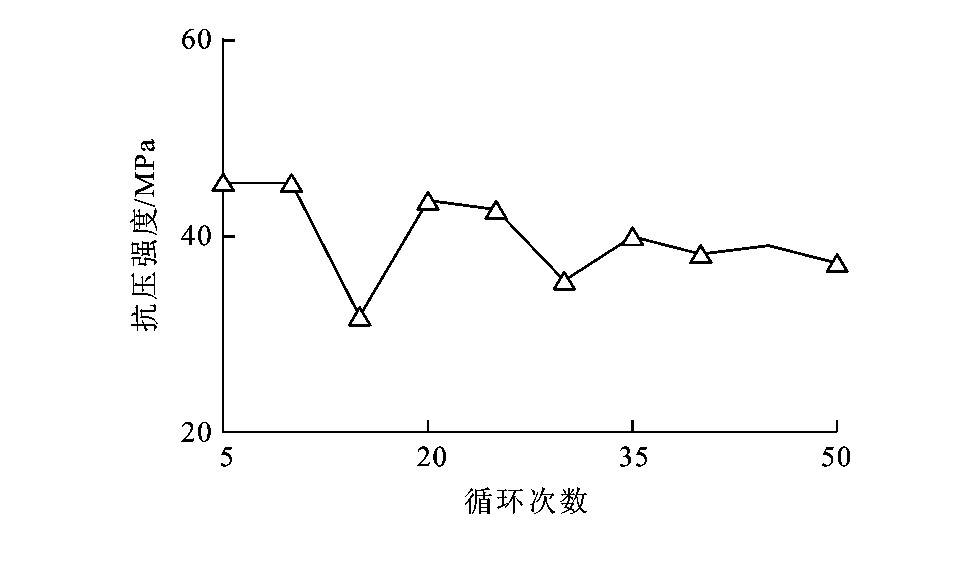
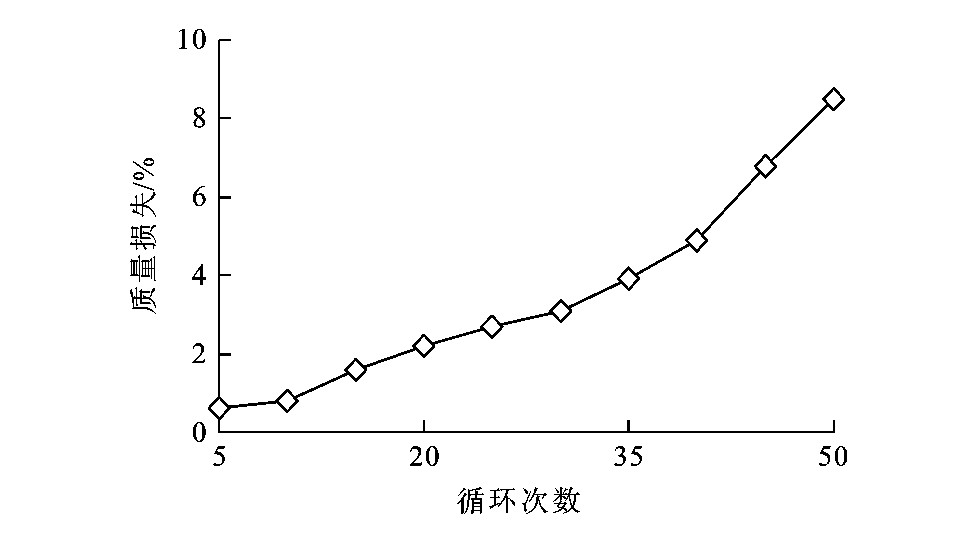
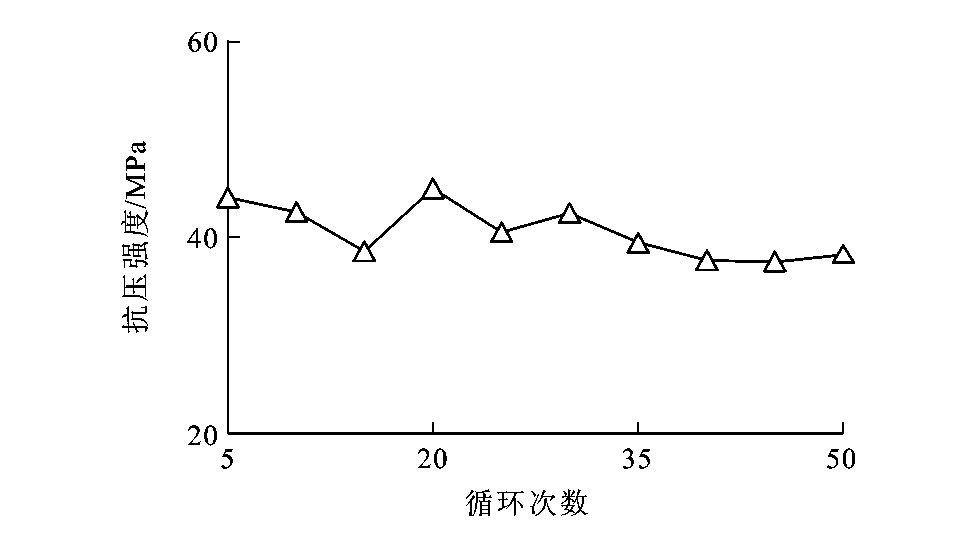
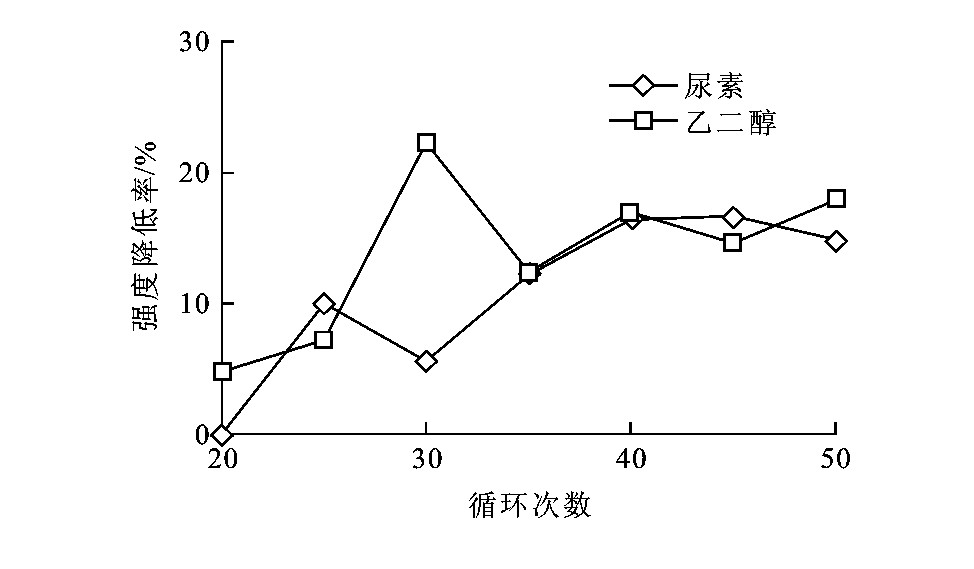
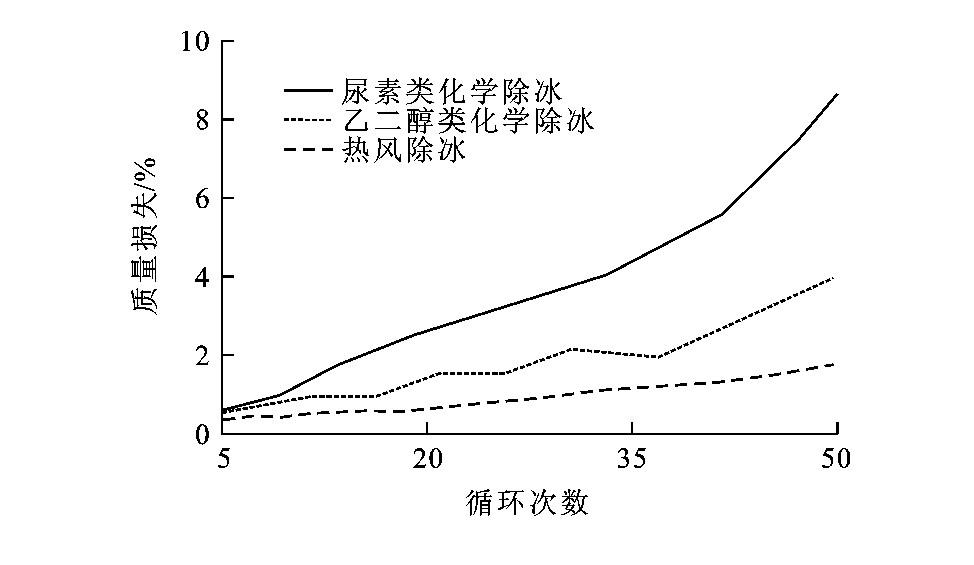
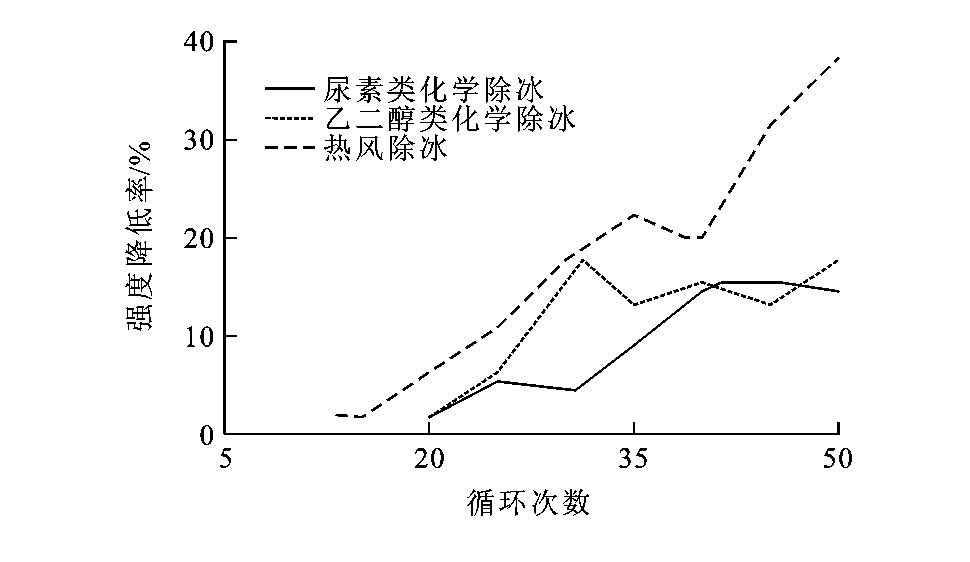
进行了热风除冰、乙二醇化学除冰与尿素化学除冰的模拟试验, 测试了混凝土试件质量损失和强度降低率, 分析了除冰方式与除冰次数对水泥混凝土道面的损伤规律。分析结果表明: 热风除冰对试件表层损伤反应较慢, 在经过45次冻融循环后才表现出明显的质量损失, 但其对试件内部结构损伤却较严重, 50次热风除冰后的强度降低超过35%。虽然50次化学除冰后试件的强度降低小于20%, 但试件表层的腐蚀性损伤造成的质量损失较显著, 尿素的腐蚀所造成的质量损失高达8.5%, 比热风除冰的质量损失高5倍以上。可见, 为了保持机场道面结构强度, 化学除冰要比热风除冰更为合理。为了降低机场跑道混凝土剥落对飞机发动机损害的隐患, 宜优先采用热风除冰方式, 但须关注其对道面结构强度的影响。
更多>
2015, 15(4): 18-25.
doi:
10.19818/j.cnki.1671-1637.2015.04.003
摘要
(
1335
)
HTML
(
317
)
PDF (456KB)
(
677
)
引用
(
)
LOS声屏障降噪效果评价
关博文
,
李硕
,
姜艺
,
赵光远
,
陈拴发
摘要:
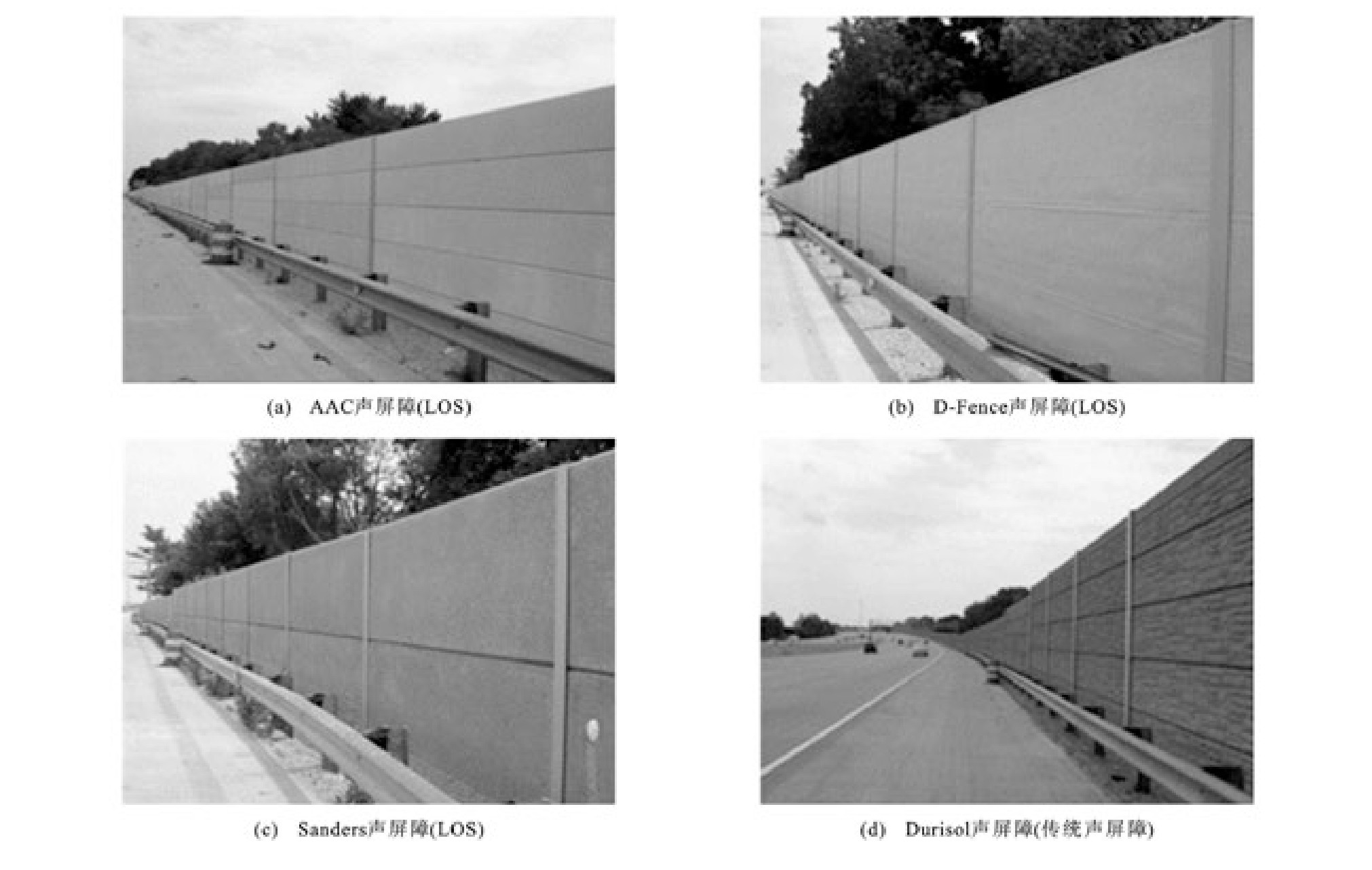
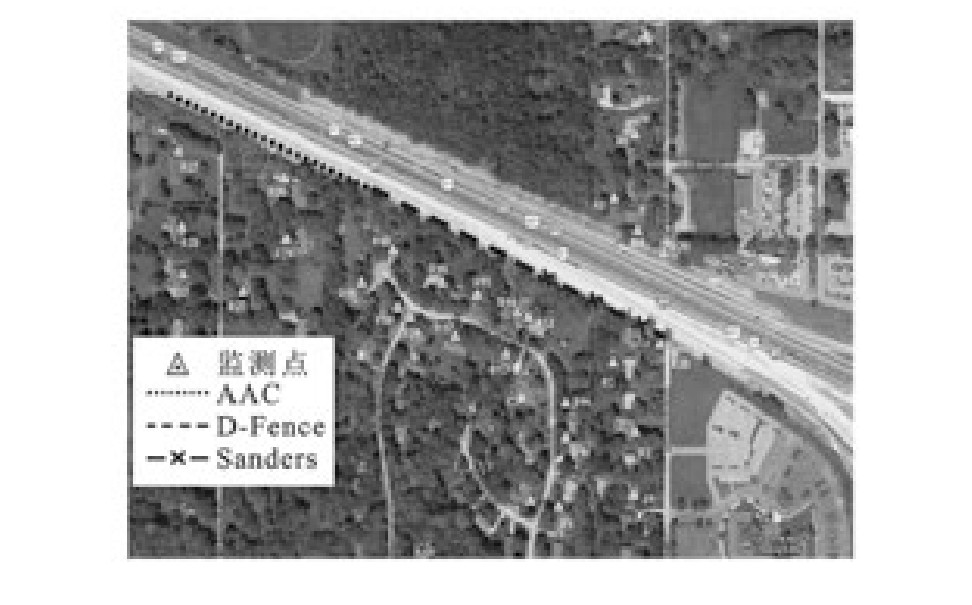
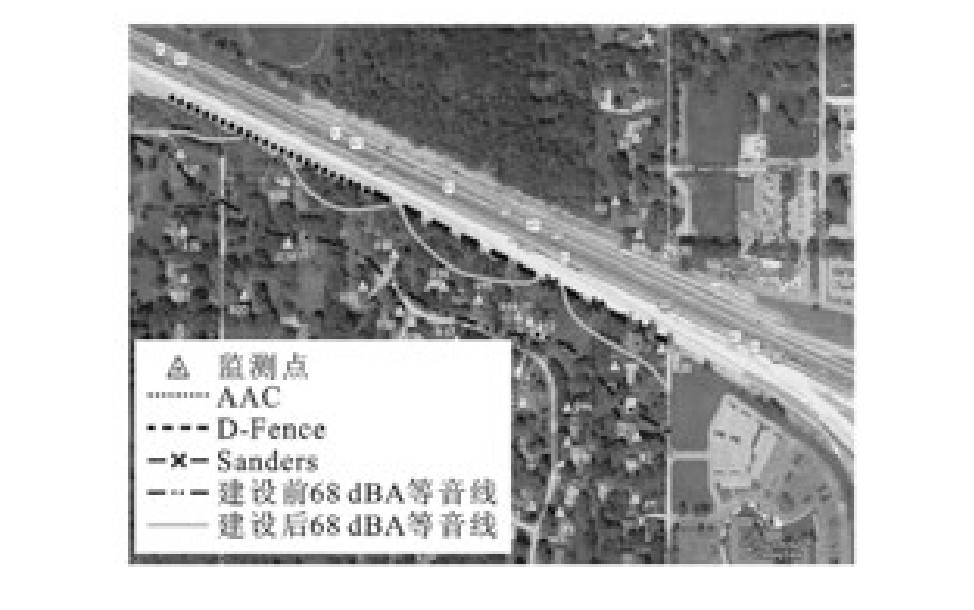
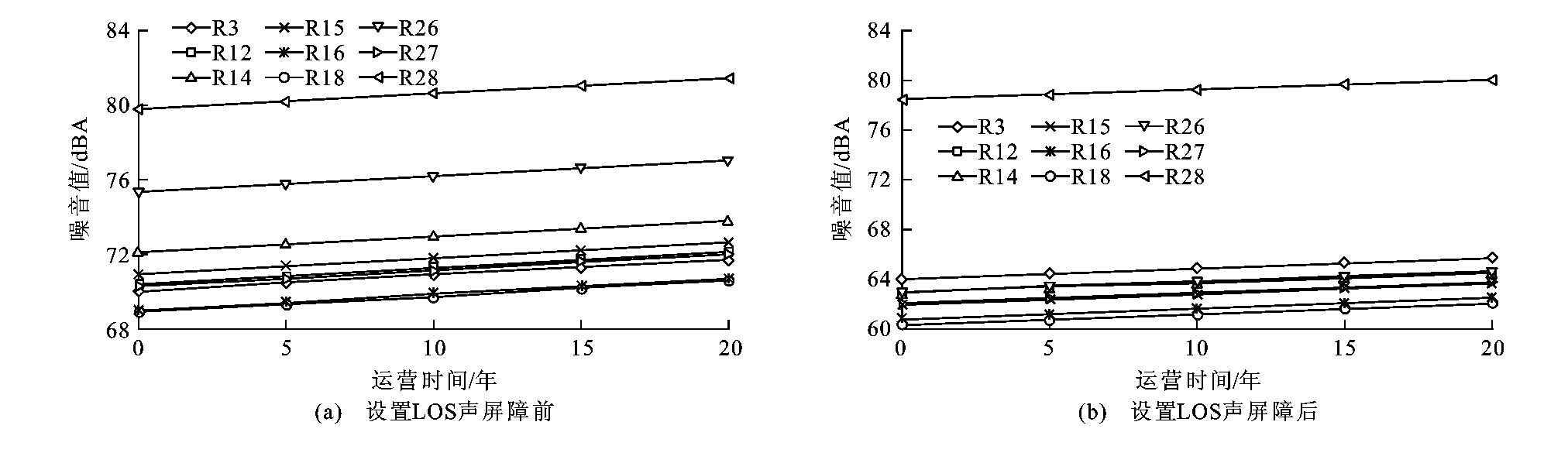
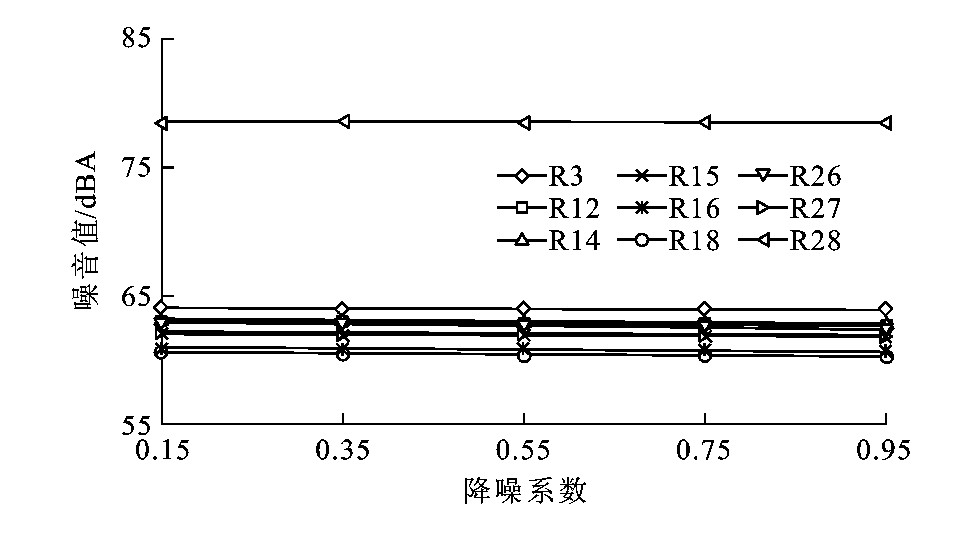
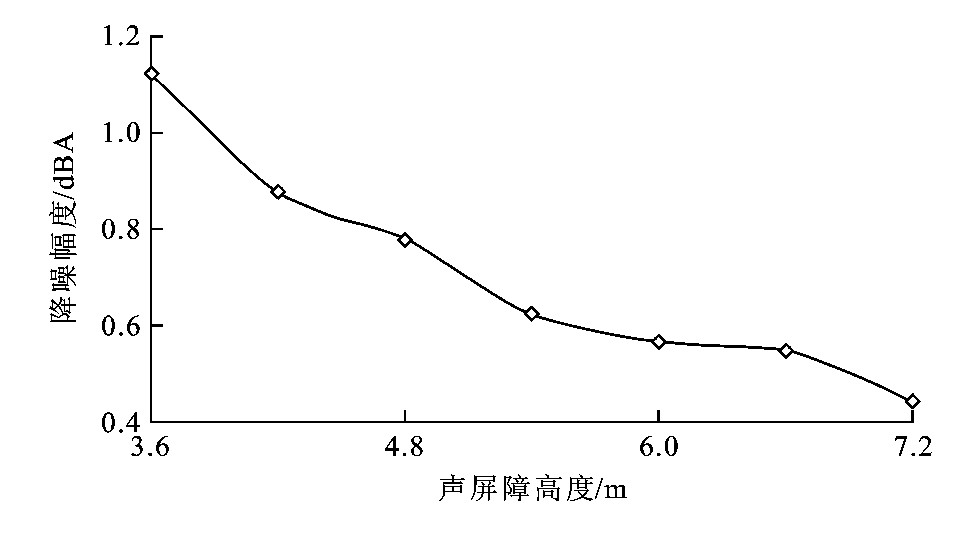
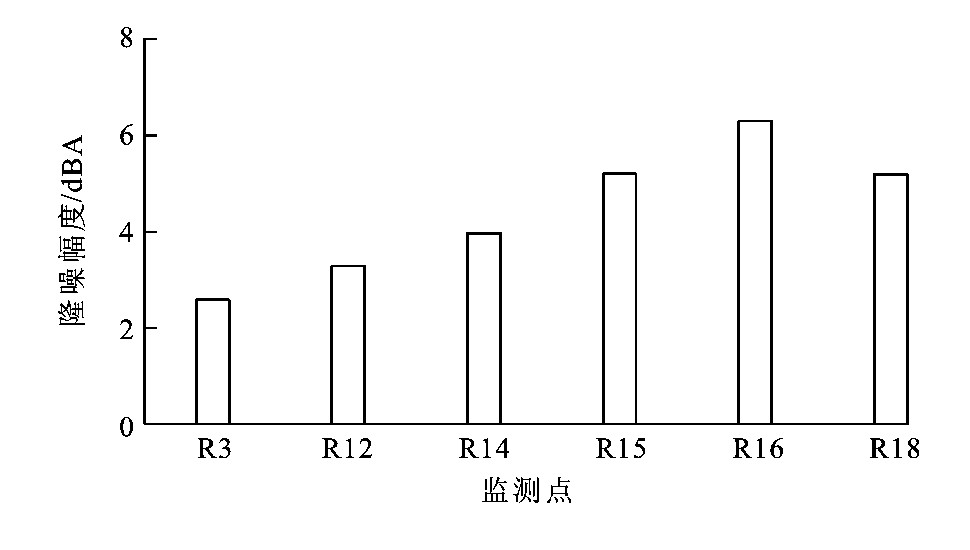
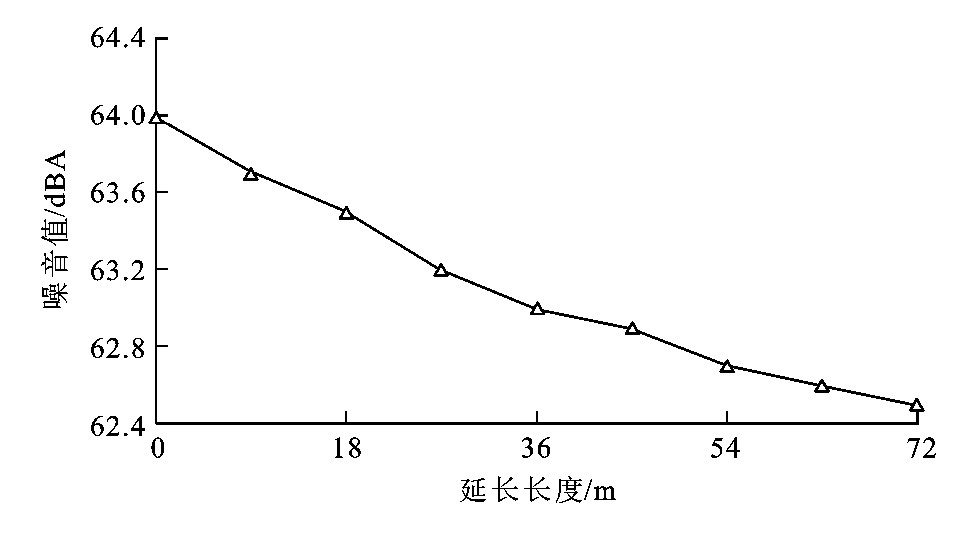
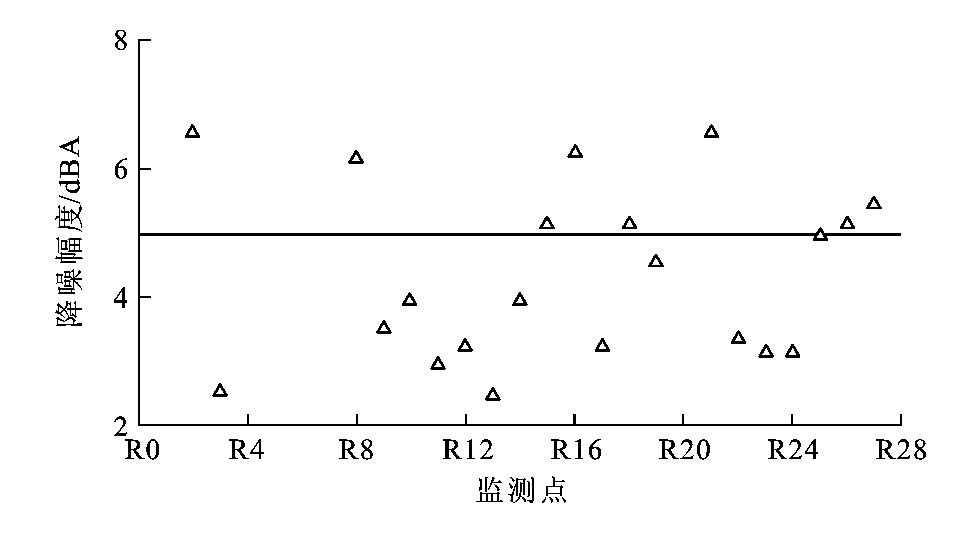
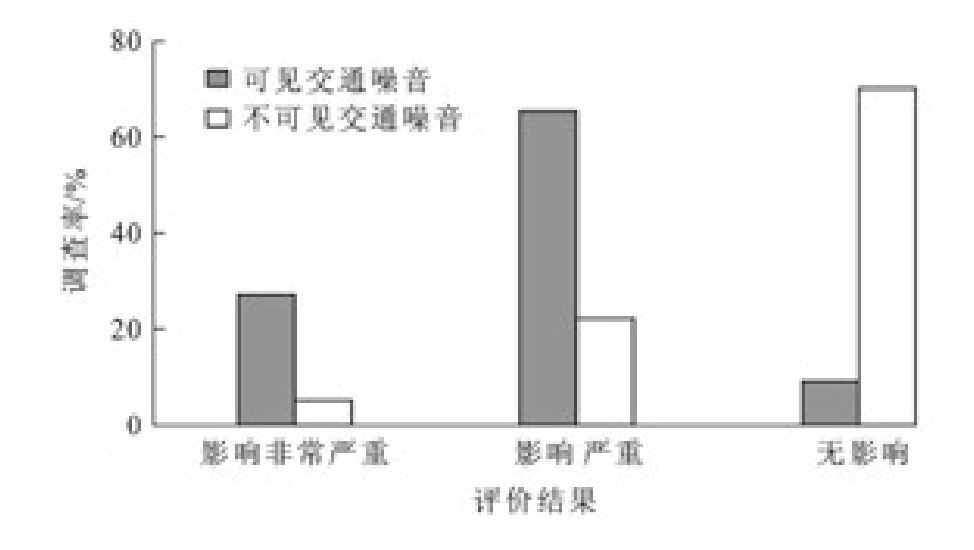
为了评价LOS声屏障在噪声水平超标较小与住户较少地区的应用效果, 对美国印第安纳州I-465高速公路新型LOS声屏障试验段进行噪声测试与TNM分析, 研究了路面类型、车辆速度、交通量、降噪系数、声屏障高度与声屏障延长对LOS声屏障降噪水平的影响, 评价了LOS声屏障应用效果, 提出了关键设计参数。研究结果表明: LOS声屏障适用于噪音水平超标较小与住户较少的地区; 路面类型对降噪效果影响较大, 将水泥混凝土路面更换为密级配沥青混凝土路面与开级配沥青混凝土路面可以明显提高降噪幅度和降噪有效率; 采用限速方法降低噪音并不明显, 不推荐采用限速的方法提高声屏障降噪效果; LOS声屏障设计时, 设计降噪幅度宜大于6.7dBA, 最低高度应大于路面行驶的大型车辆高度, 最大高度不超过6.6m, 最佳高度由设计年限内降噪效果模拟分析确定。
更多>
2015, 15(4): 26-33.
doi:
10.19818/j.cnki.1671-1637.2015.04.004
摘要
(
1860
)
HTML
(
415
)
PDF (480KB)
(
878
)
引用
(
)
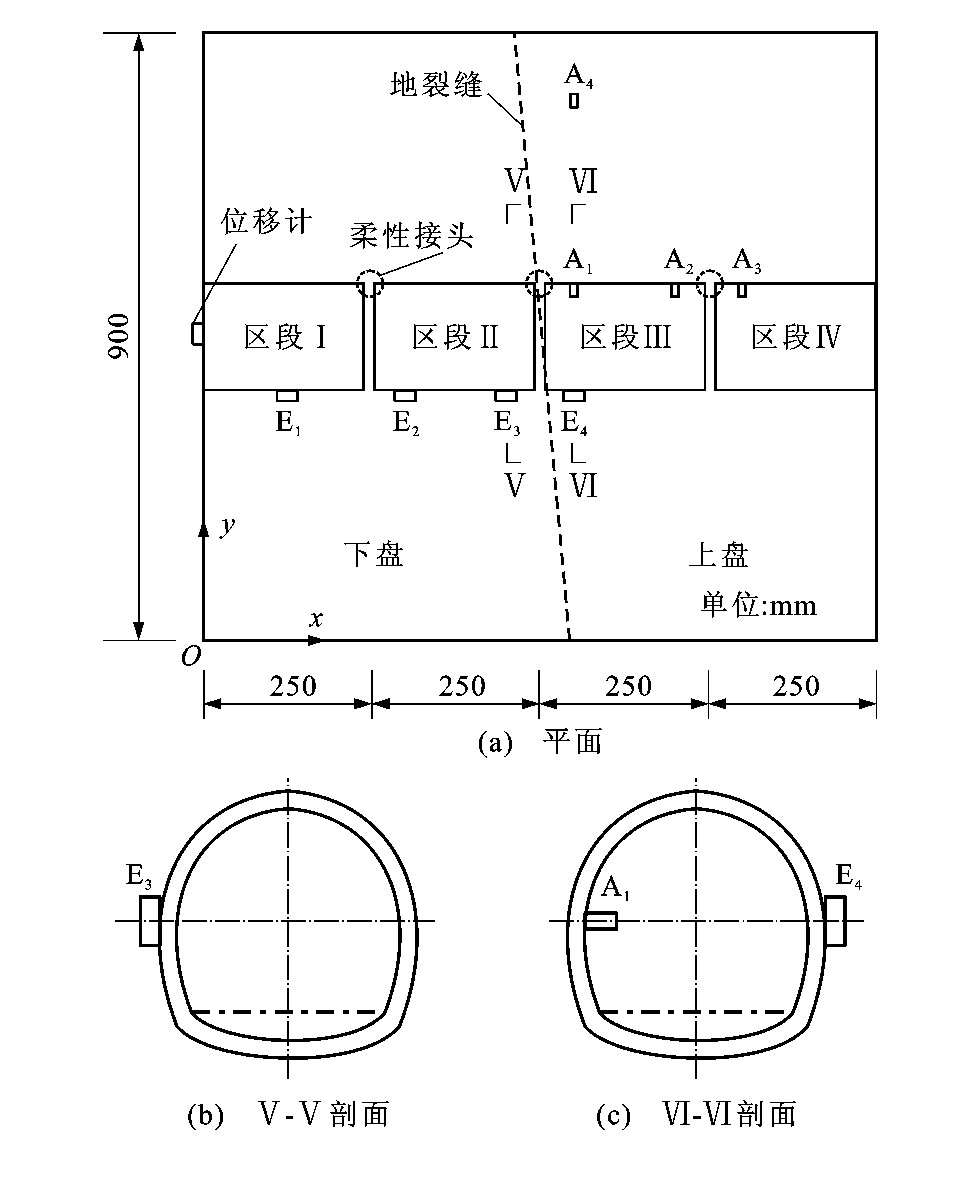
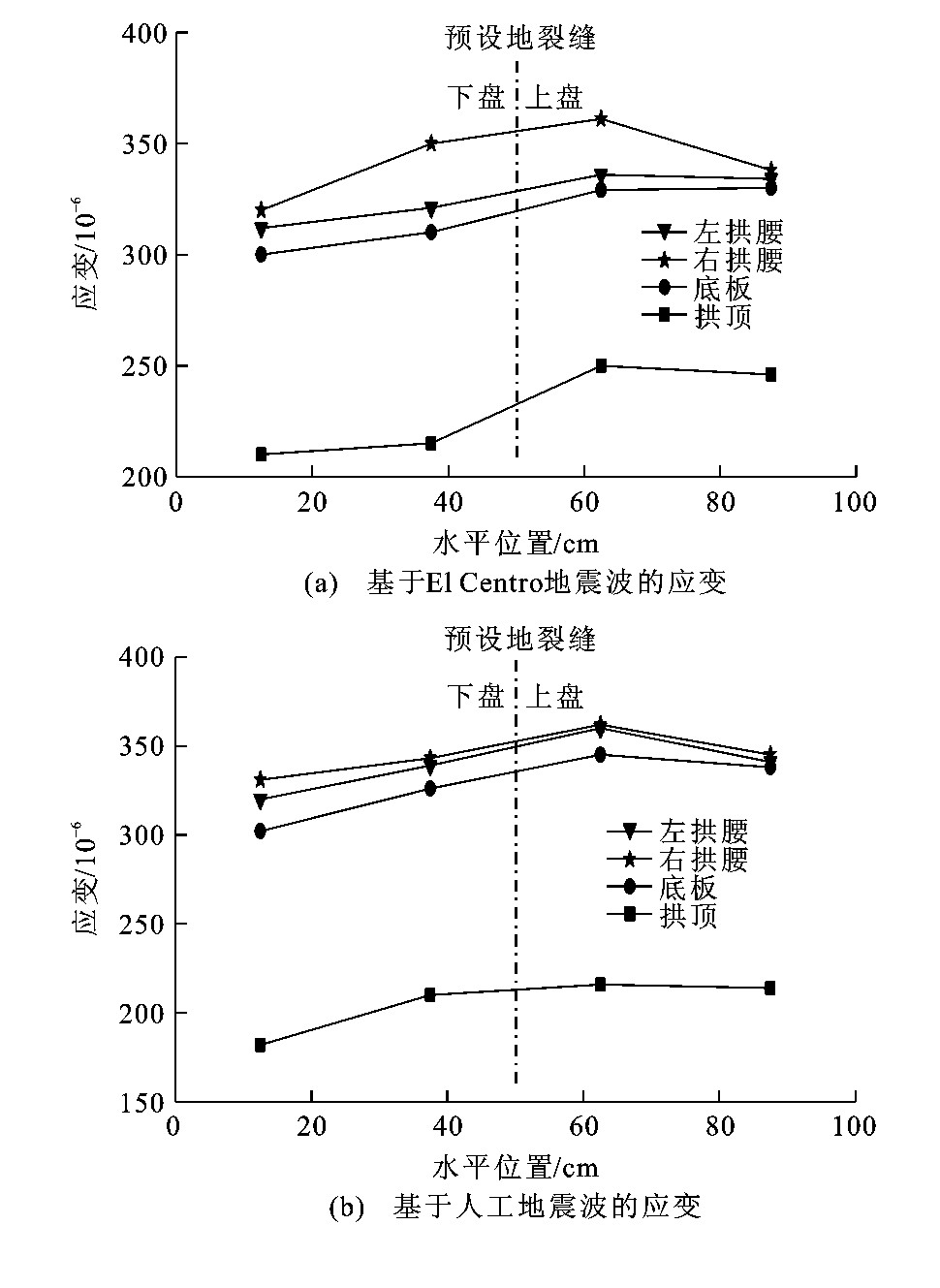
柔性接头地铁隧道穿越地裂缝的地震响应
刘妮娜
,
刘军涛
,
黄强兵
,
韩冬冬
,
RifatBULUT
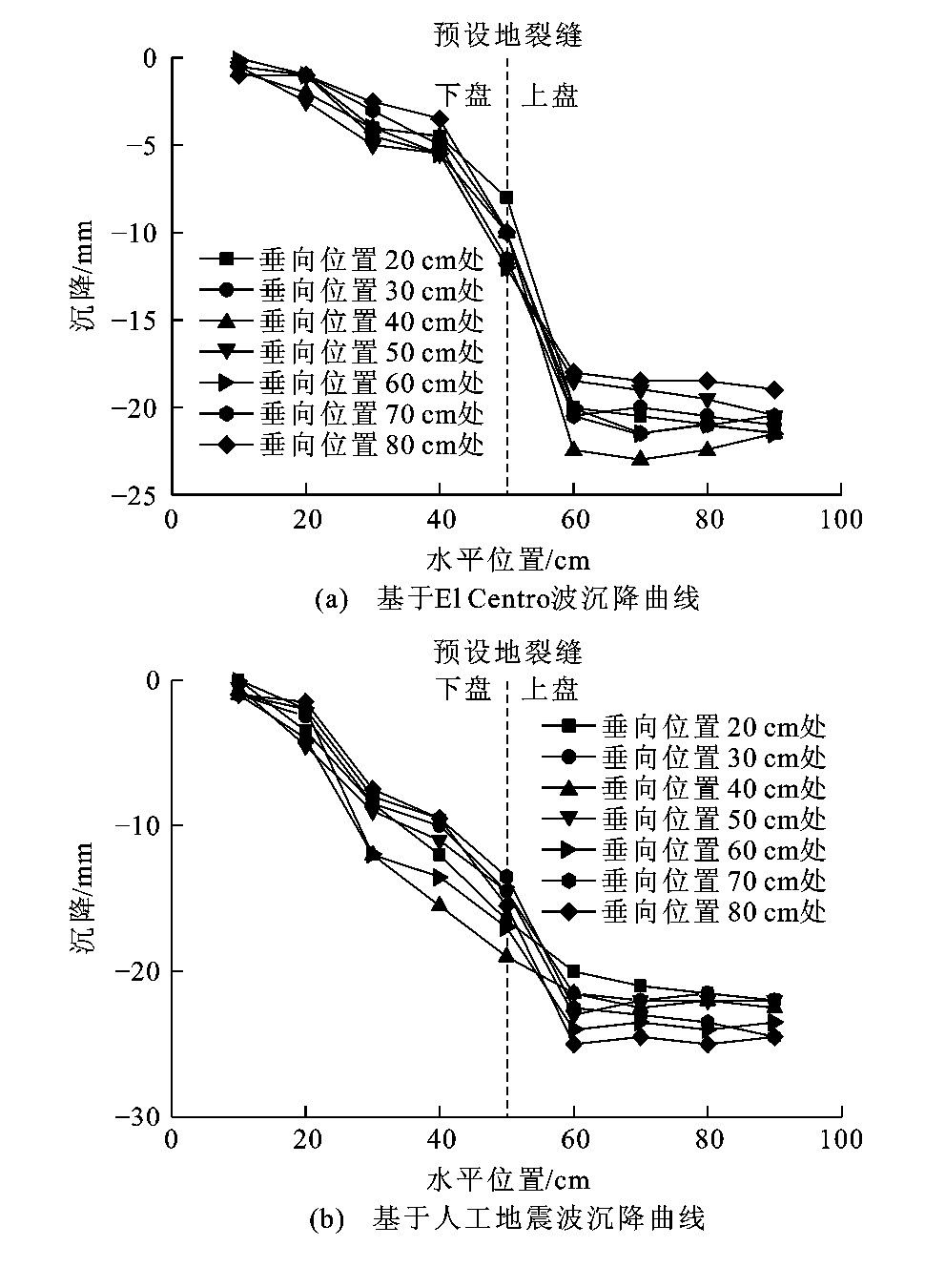
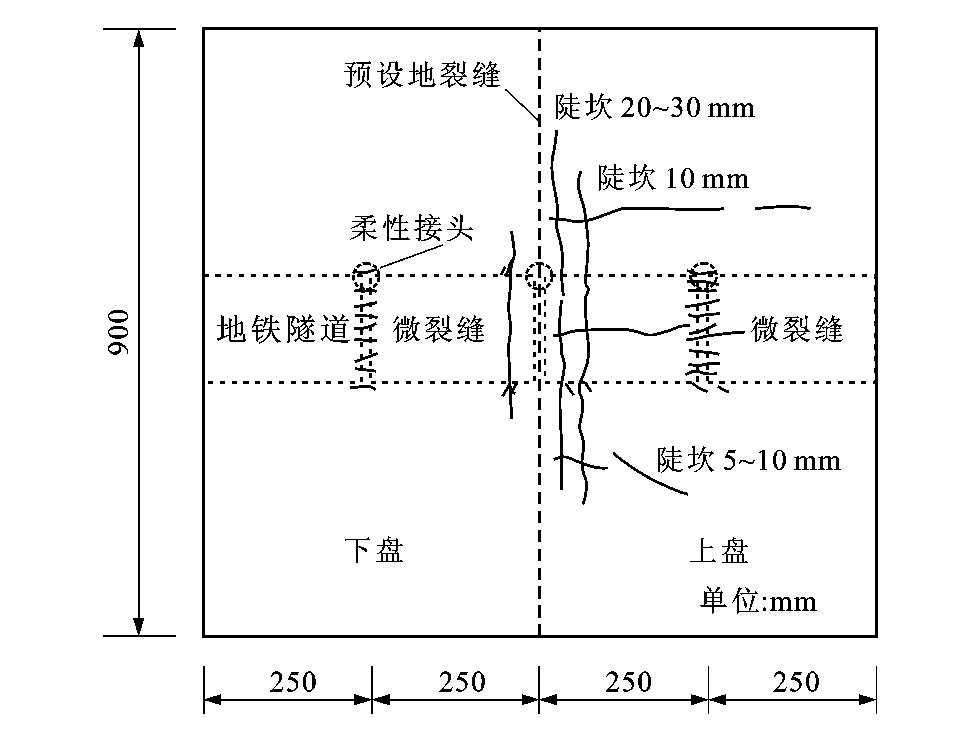
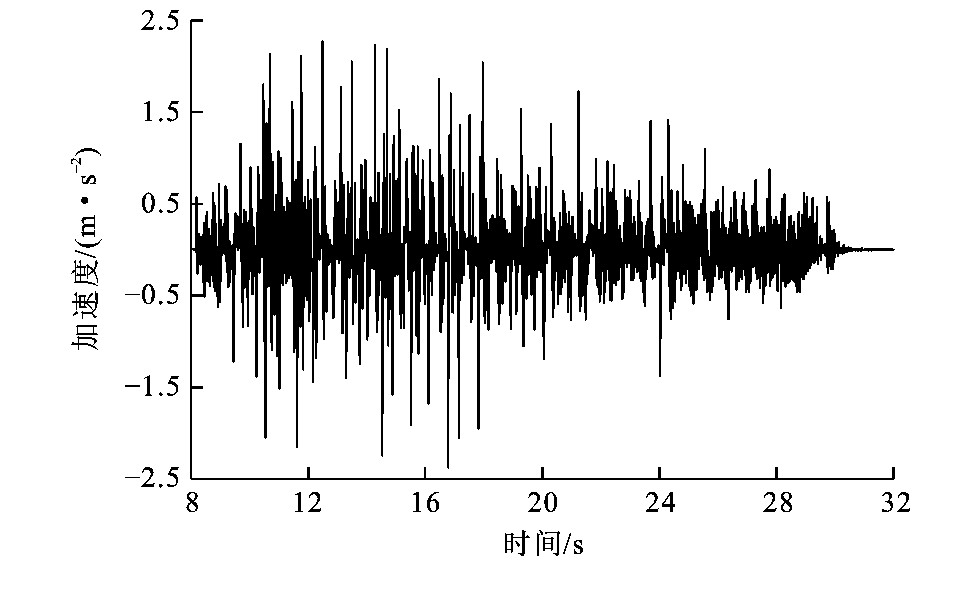
摘要:
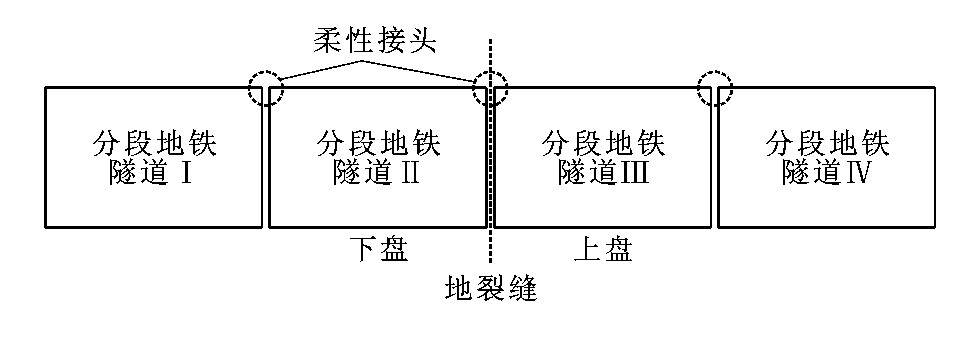
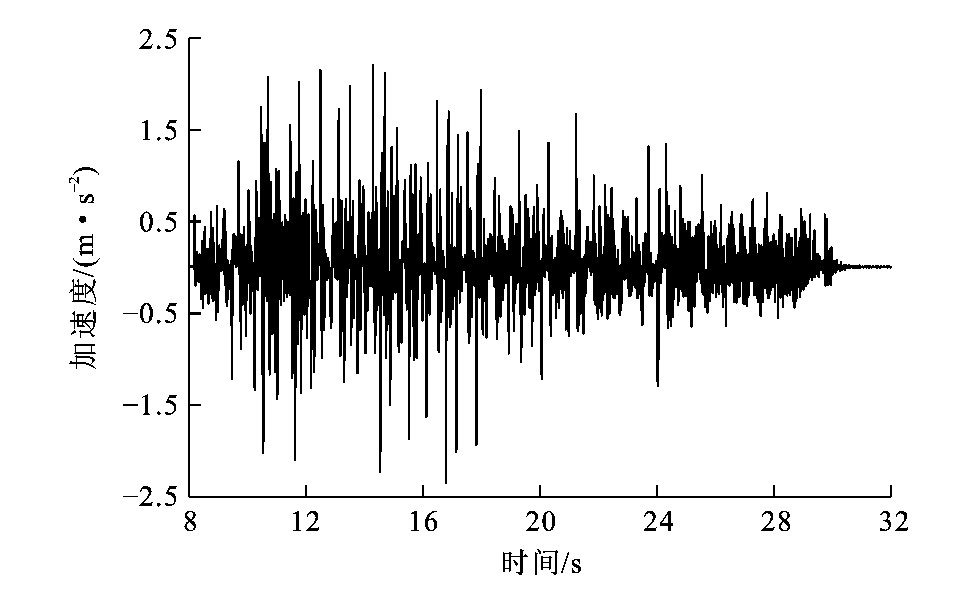
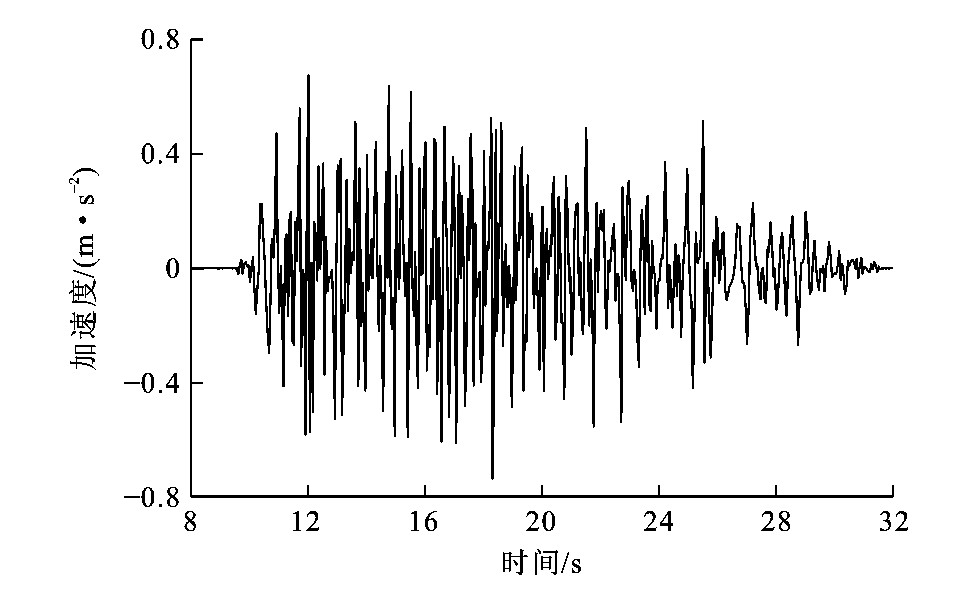
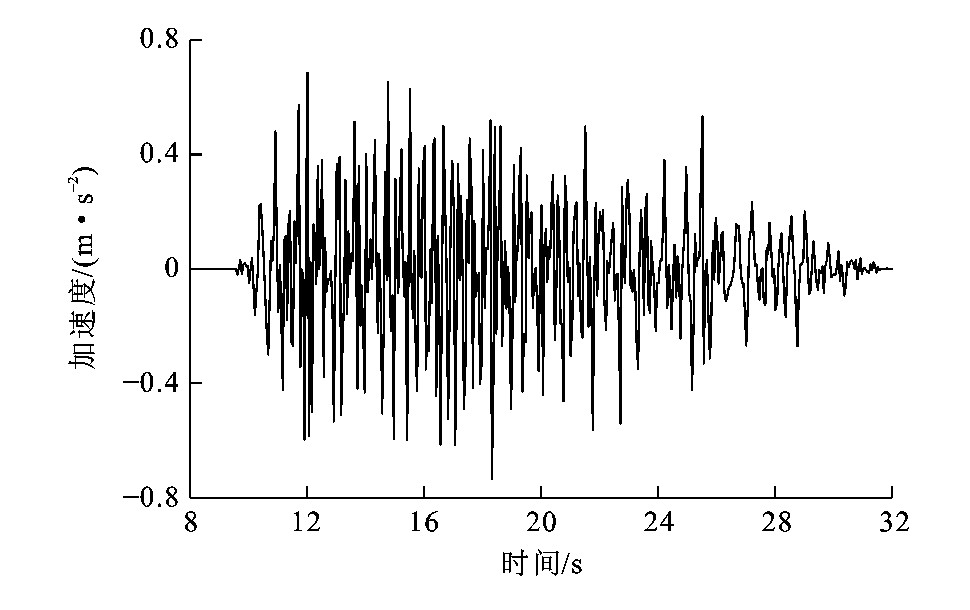
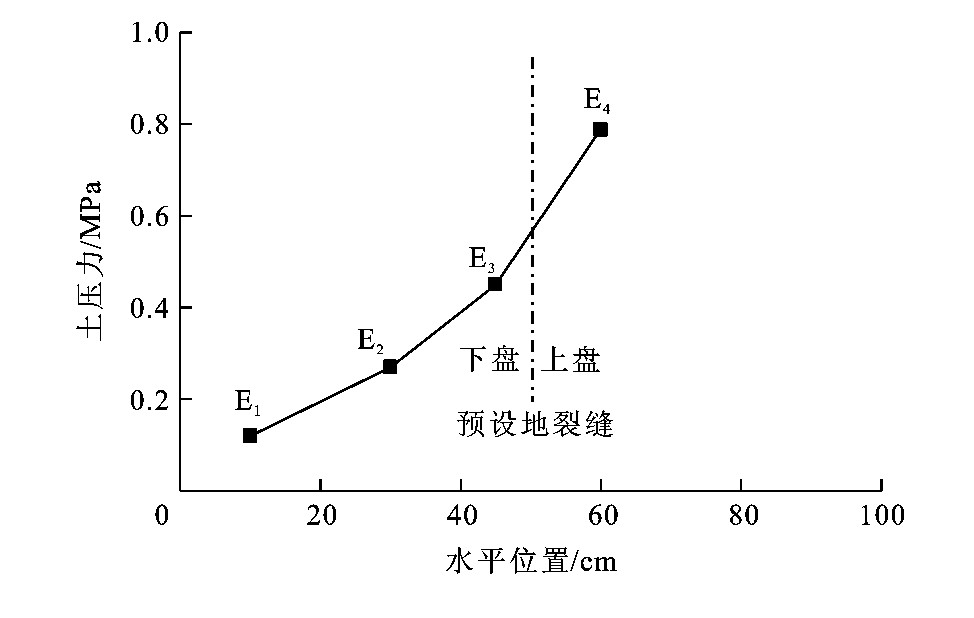
采用振动台模型试验, 模拟地震荷载和地裂缝场地沉降, 分析了穿越地裂缝区域且设置柔性接头的分段地铁隧道的动力响应, 研究了地裂缝场地沉降、裂缝发育特征、地铁隧道加速度响应特征、土压力与隧道各区段不同部位的应变规律。分析结果表明: 由地裂缝场地沉降与地震荷载耦合作用所产生的差异沉降和裂缝多集中于柔性接头部位; 各区段地铁隧道间的运动具有一定独立性, 上盘靠近地裂缝的地铁隧道的加速度峰值是下盘隧道的3.2倍; 距离地裂缝越近土压力越大, 且在耦合荷载作用下, 上盘土压力是下盘土压力的6.7倍; 地铁隧道各区段左右拱腰应变较大, 底板处应变次之, 拱顶部位应变较小; 柔性接头设置后各区段应变增率减小, 在距离地裂缝较近部位未出现明显的应变增加现象。可见, 在地震荷载与地裂缝场地沉降耦合作用下, 柔性接头能够减小地铁隧道地裂缝位置处的集中应力与地裂缝场地的变形。
更多>
2015, 15(4): 34-42.
doi:
10.19818/j.cnki.1671-1637.2015.04.005
摘要
(
1777
)
HTML
(
418
)
PDF (561KB)
(
1014
)
引用
(
)
载运工具运用工程
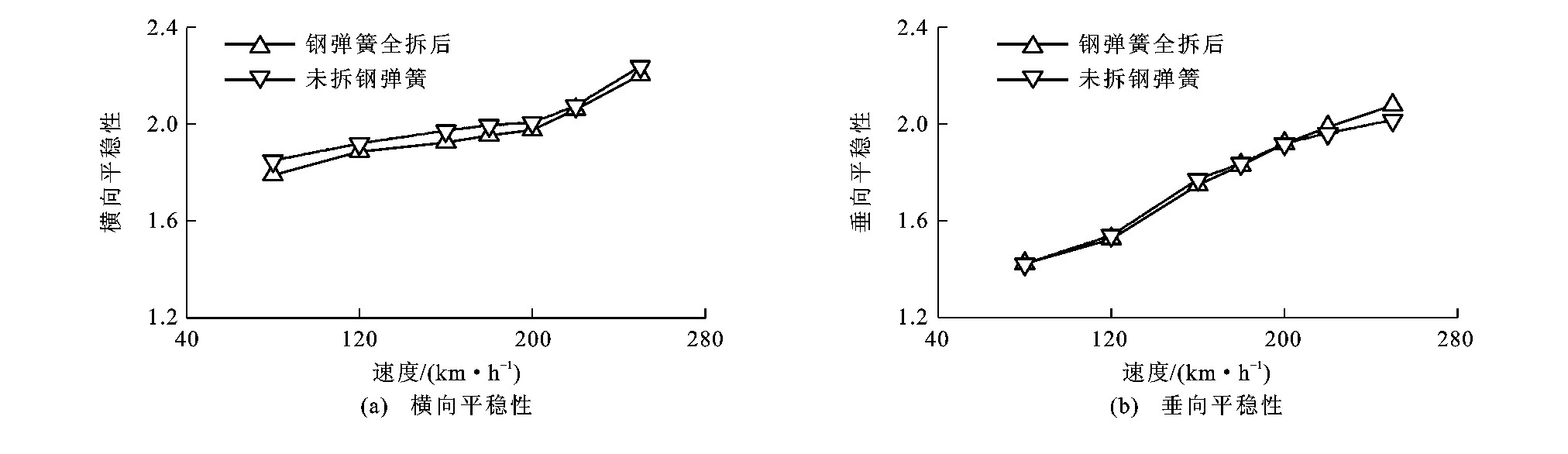
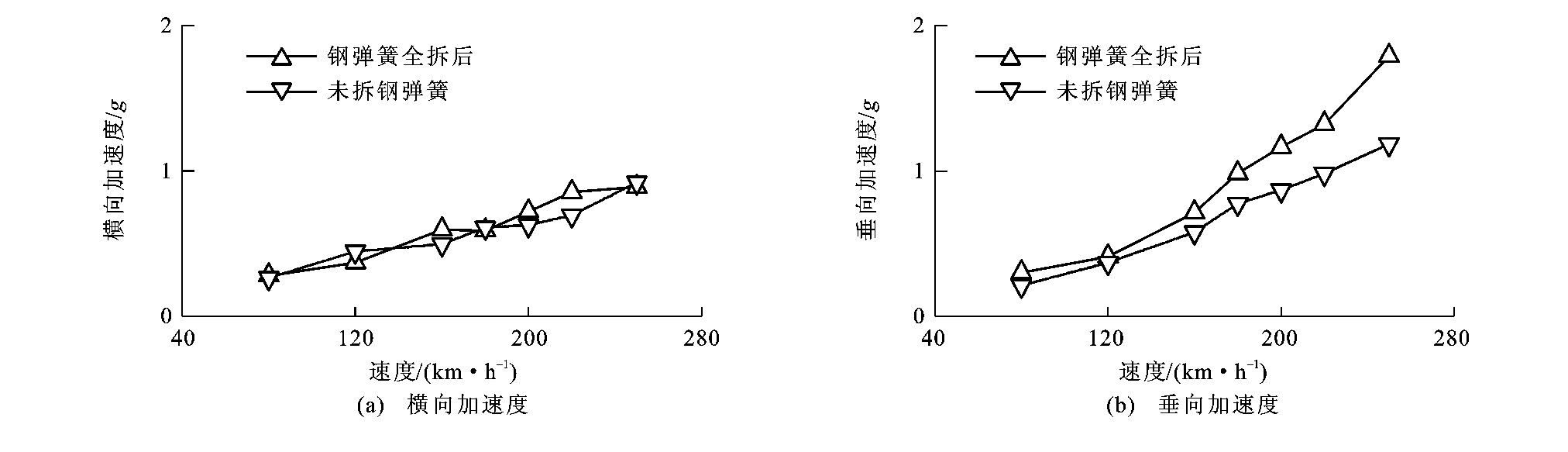
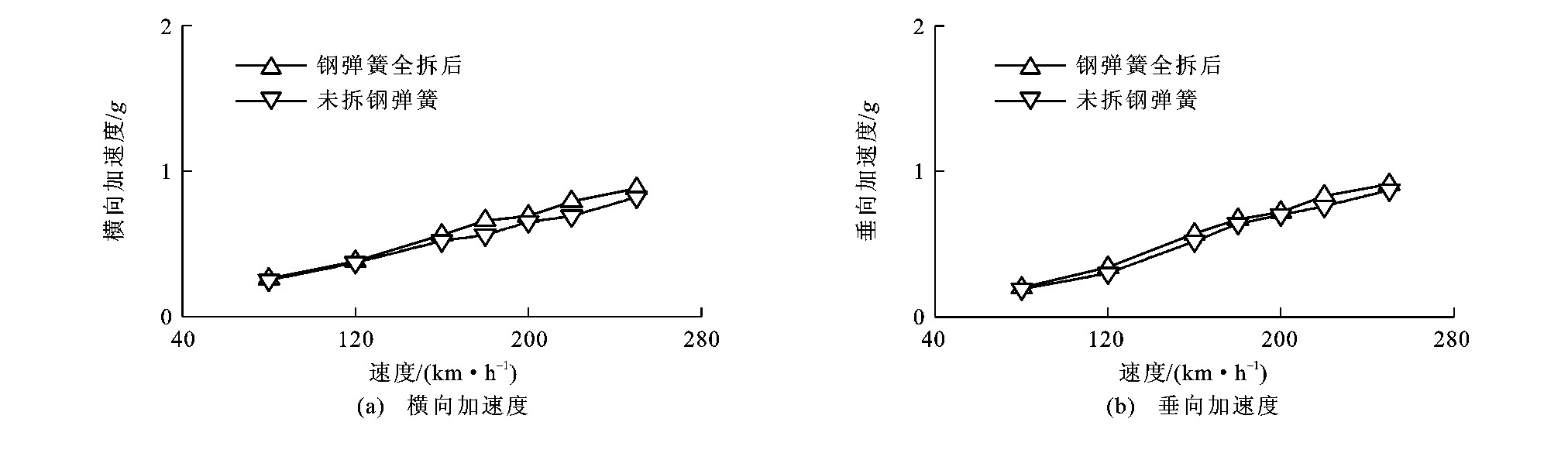
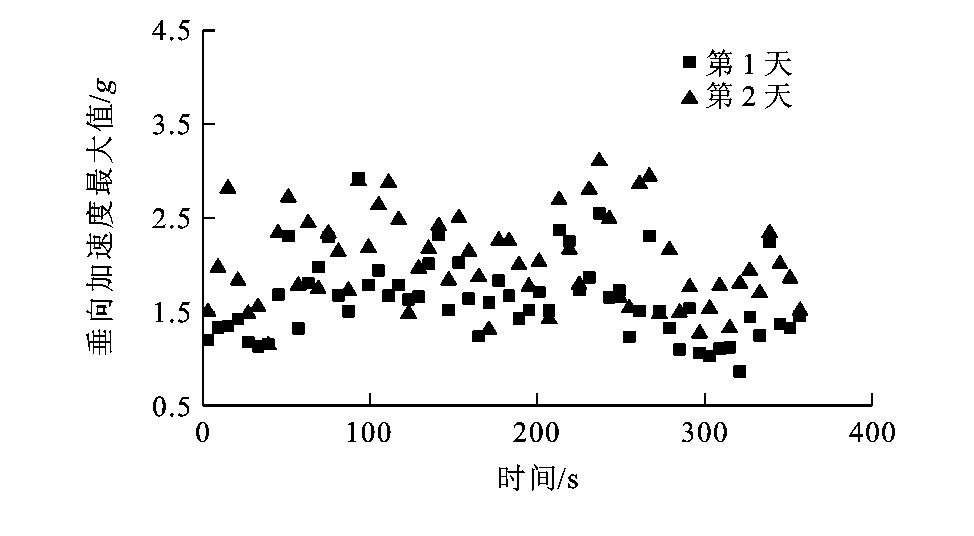
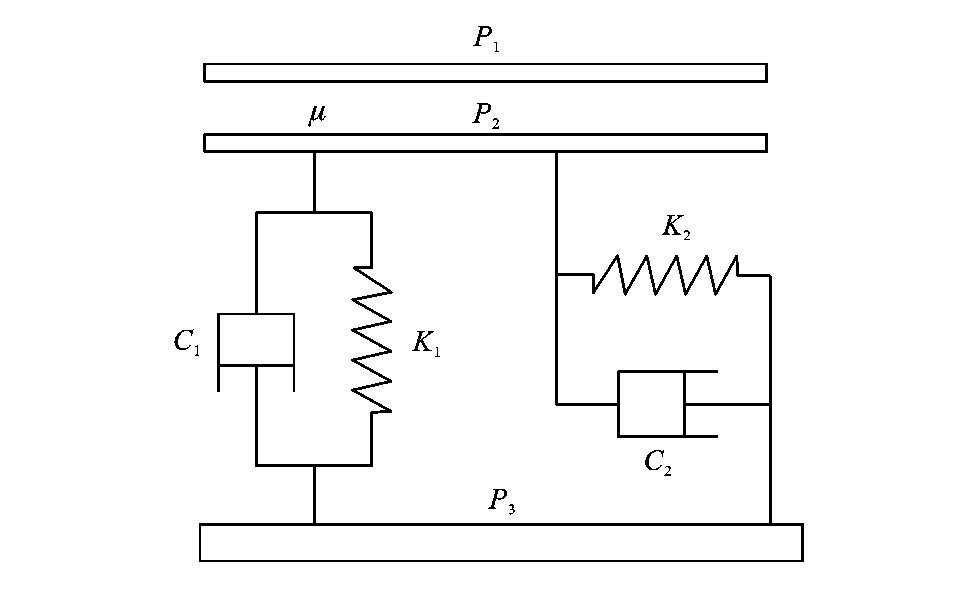
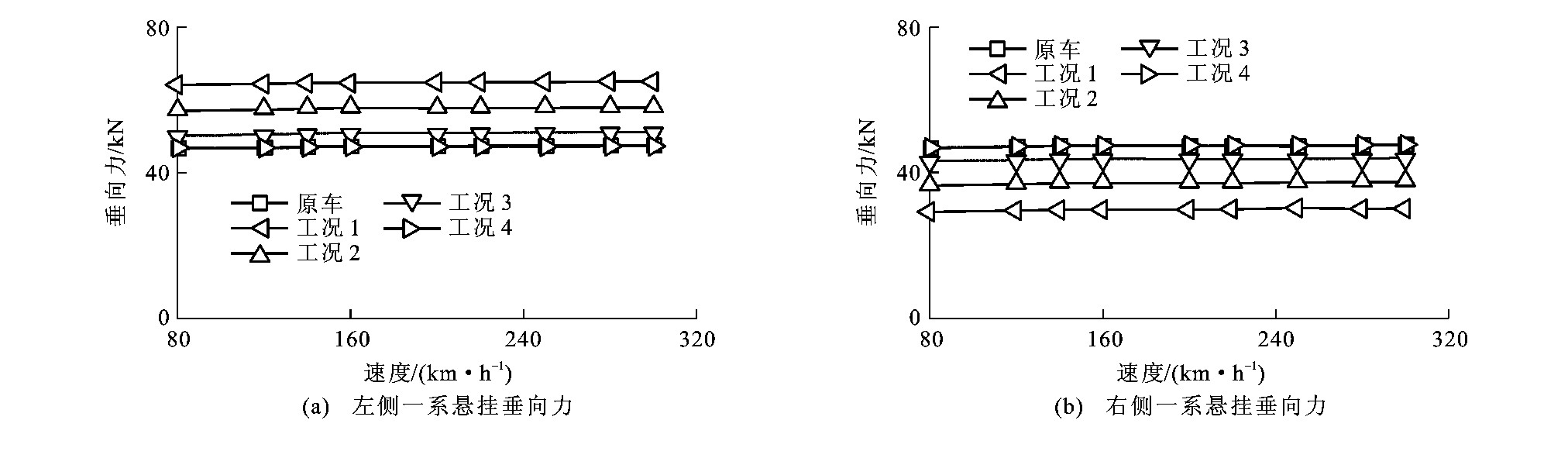
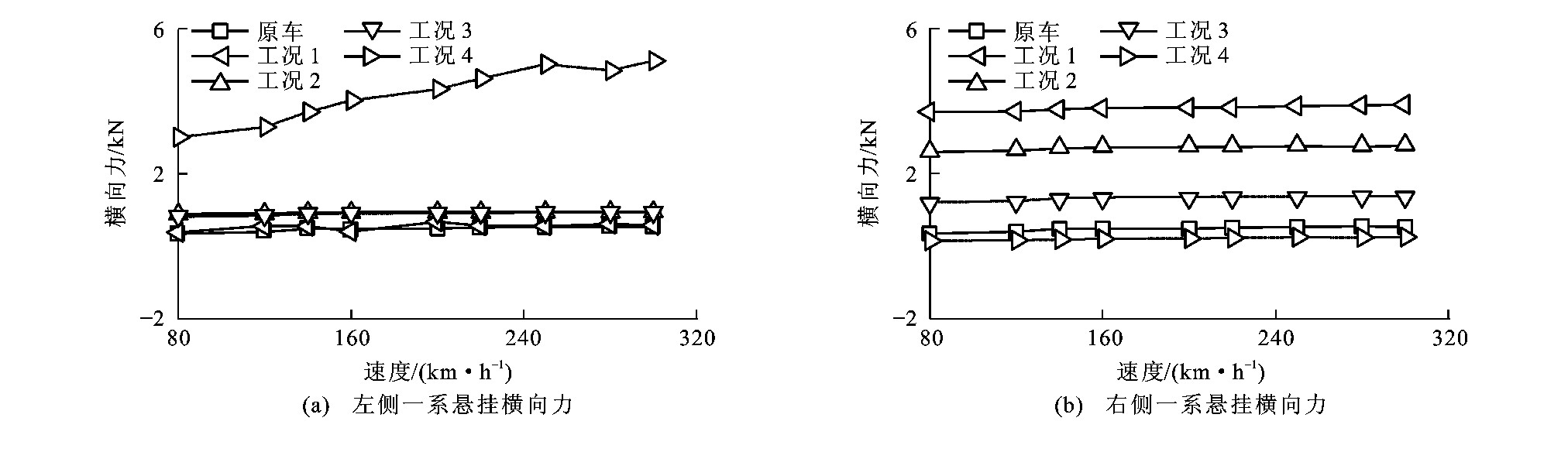
钢弹簧故障状态的车辆动力学性能
刘国云
,
曾京
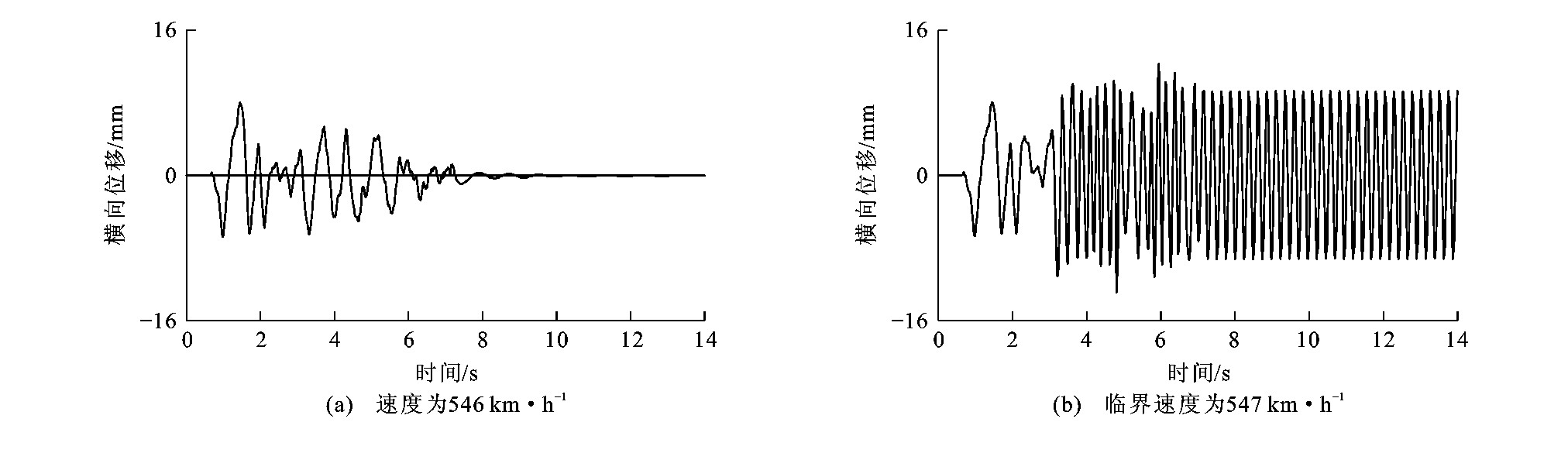
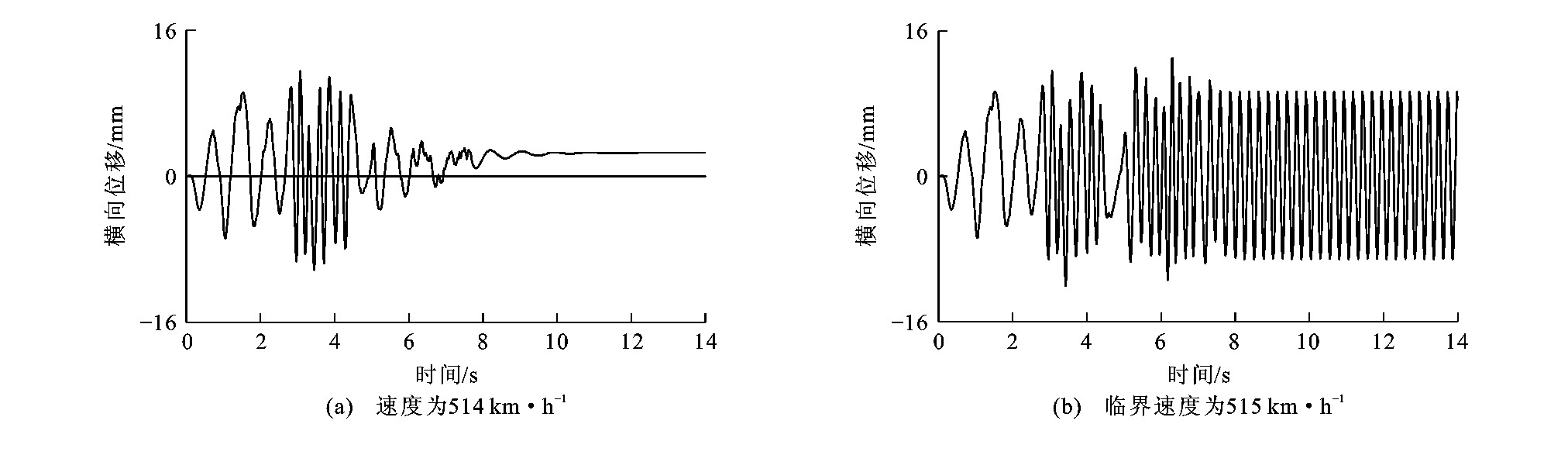
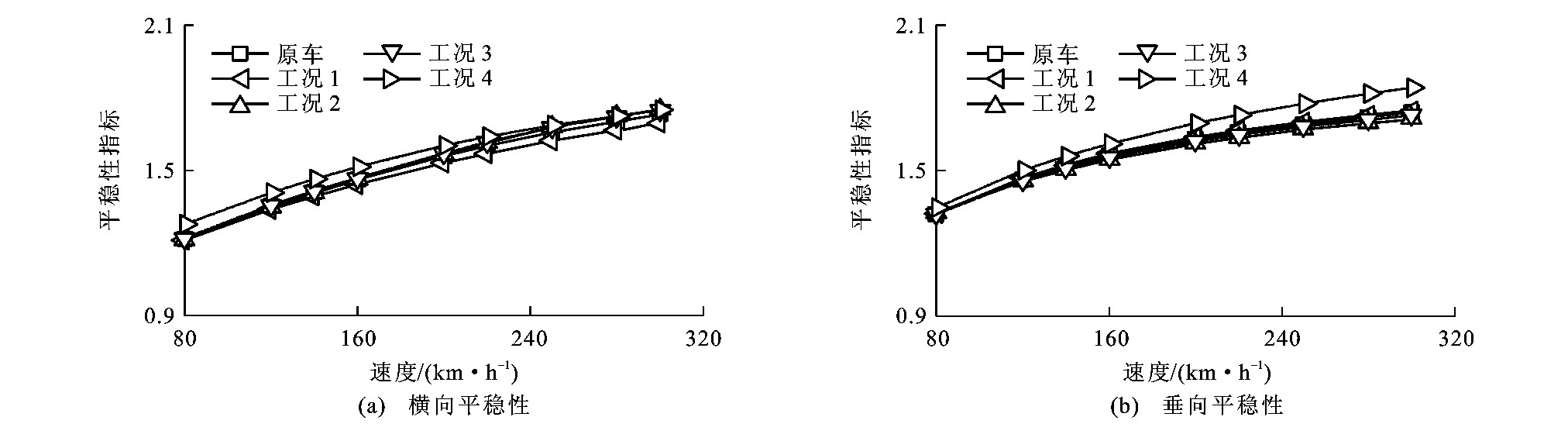
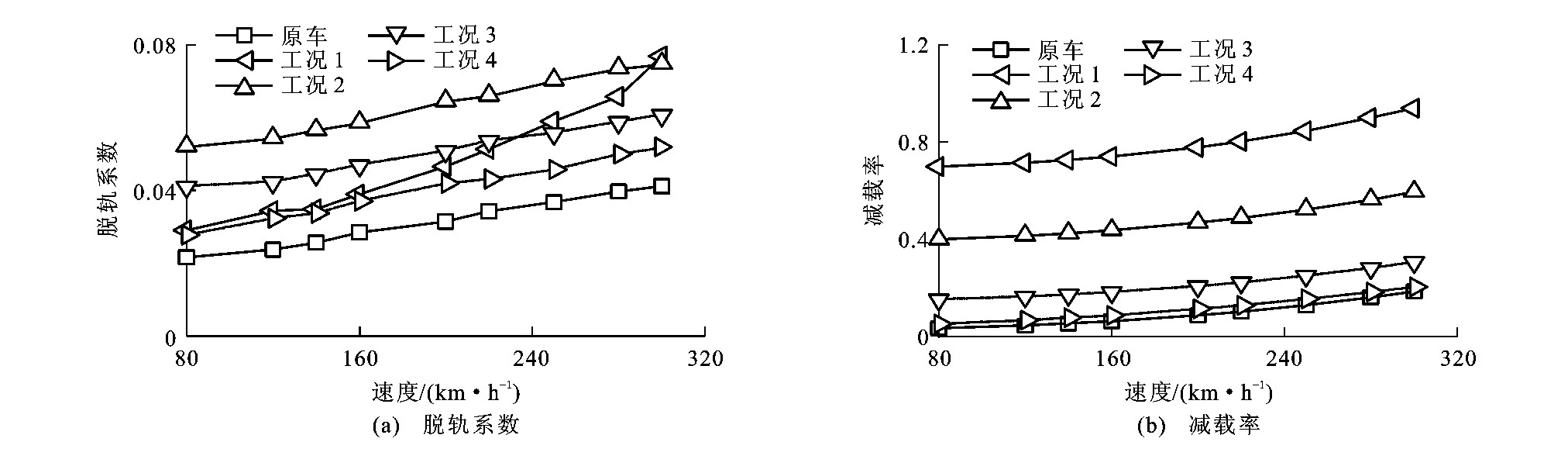
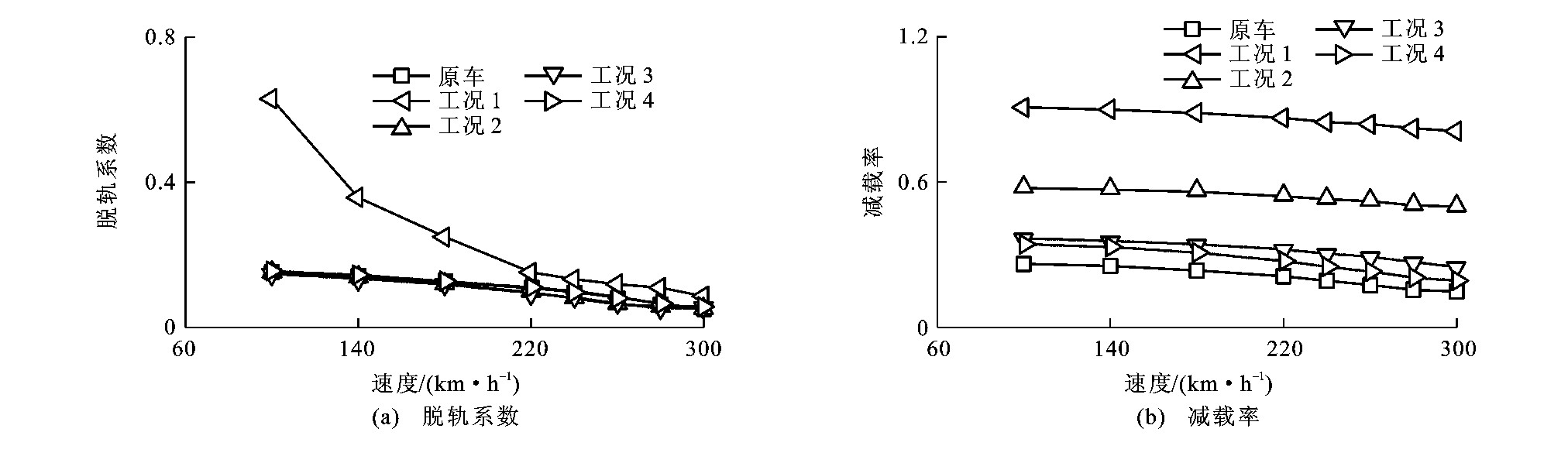
摘要:
考虑了车辆导向轮对一侧轴箱钢簧出现失效的四种工况: 钢簧内外圈均断裂、外圈断裂、内圈断裂和钢簧“冻死”, 建立了钢簧失效工况下的车辆系统动力学模型, 分析了钢簧失效对车辆动力学性能的影响。仿真结果表明: 钢簧失效后, 轮对的平衡位置偏离轨道中心线, 全断裂工况下偏离最大, 约为3mm; 车辆的临界速度降低, 全断裂工况下降低最大, 约为30km·h
-1
;失效弹簧所在轮对的轮载差变化较大, 全断裂工况下轮载差最大, 约为50kN; 转向架断裂弹簧处及其斜对角轴箱悬挂垂向力将减小, 另一对角处的轴箱悬挂垂向力将增大, 从而使转向架承受较大的扭曲载荷; 钢簧失效很容易使脱轨系数和轮重减载率等安全性指标超过限定值, 增加了车辆运行安全的隐患, 在直线上200~300km·h
-1
速度范围内和曲线(半径为7 000m)上100~300km·h
-1
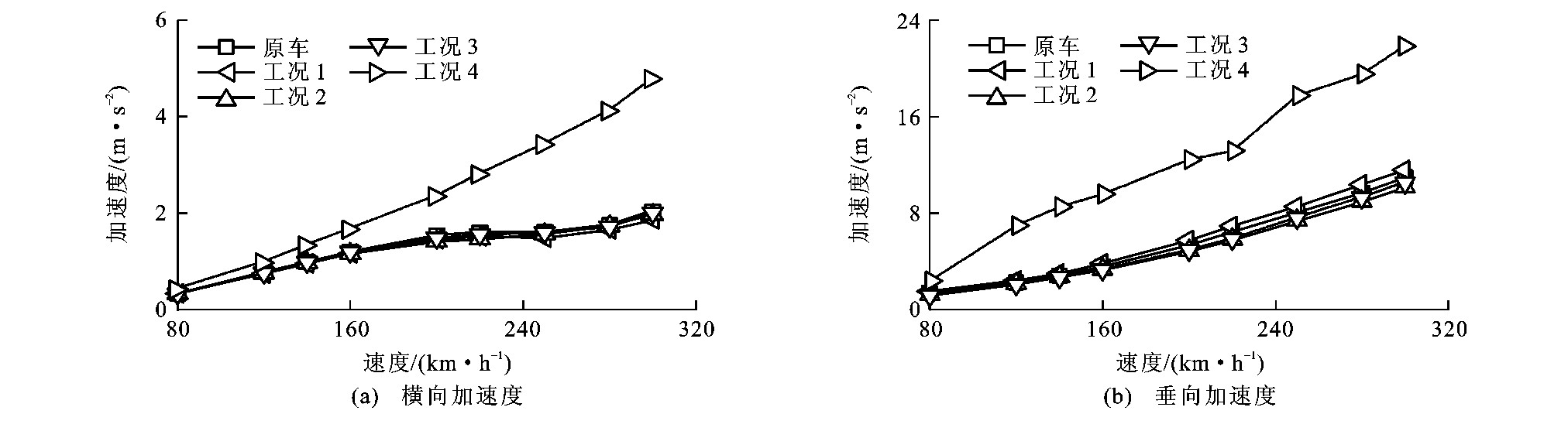
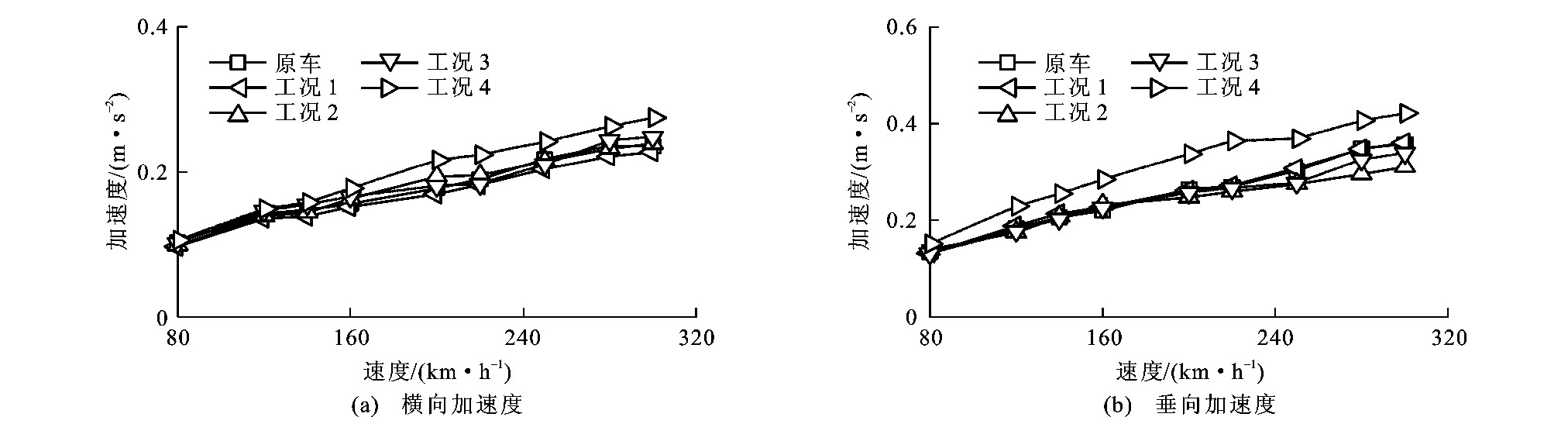
速度范围内, 全断裂工况下的减载率都超过0.8;钢簧失效对车辆横向平稳性影响不大, 但钢簧“冻死”会使垂向平稳性变差, 相对于正常工况, 在300km·h
-1
时增加约0.1。
更多>
2015, 15(4): 43-51.
doi:
10.19818/j.cnki.1671-1637.2015.04.006
摘要
(
1576
)
HTML
(
470
)
PDF (572KB)
(
808
)
引用
(
)
动车低速脱轨的动态响应
郭力荣
,
王开云
,
王惠琼
,
张兵
,
林建辉
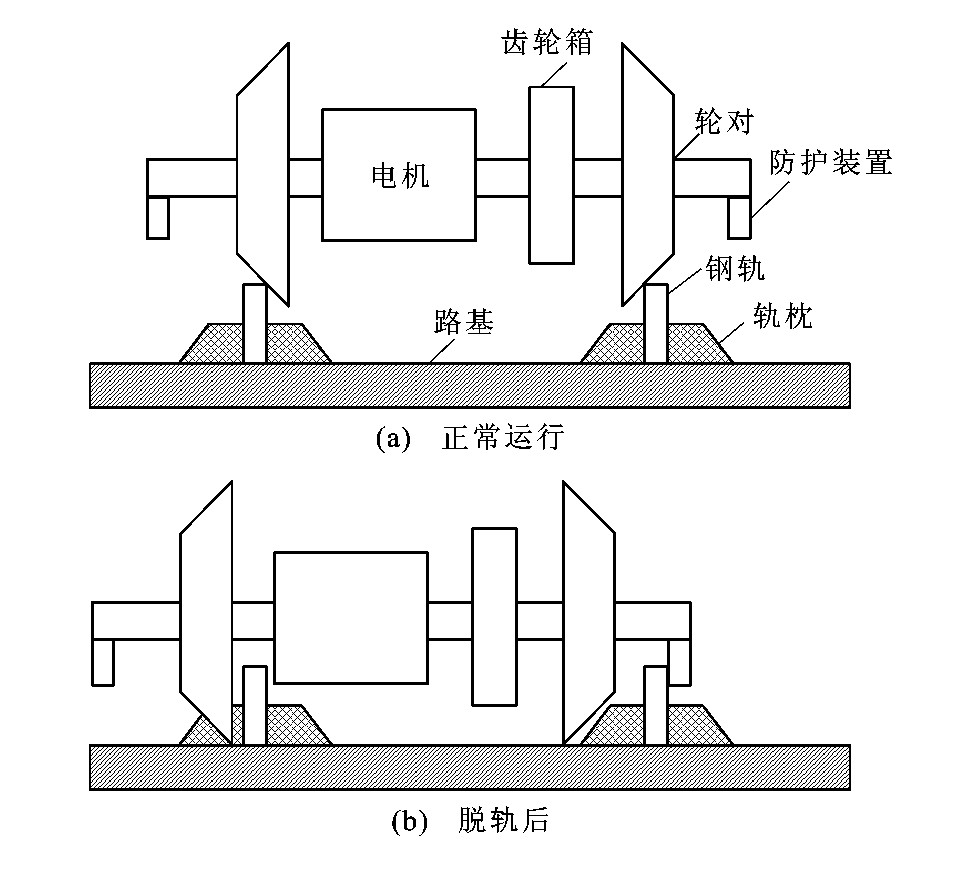
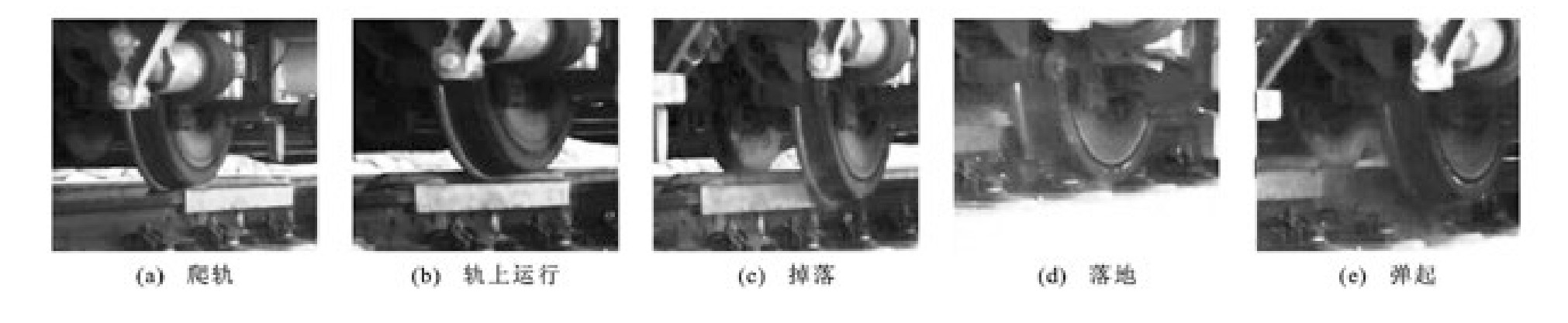
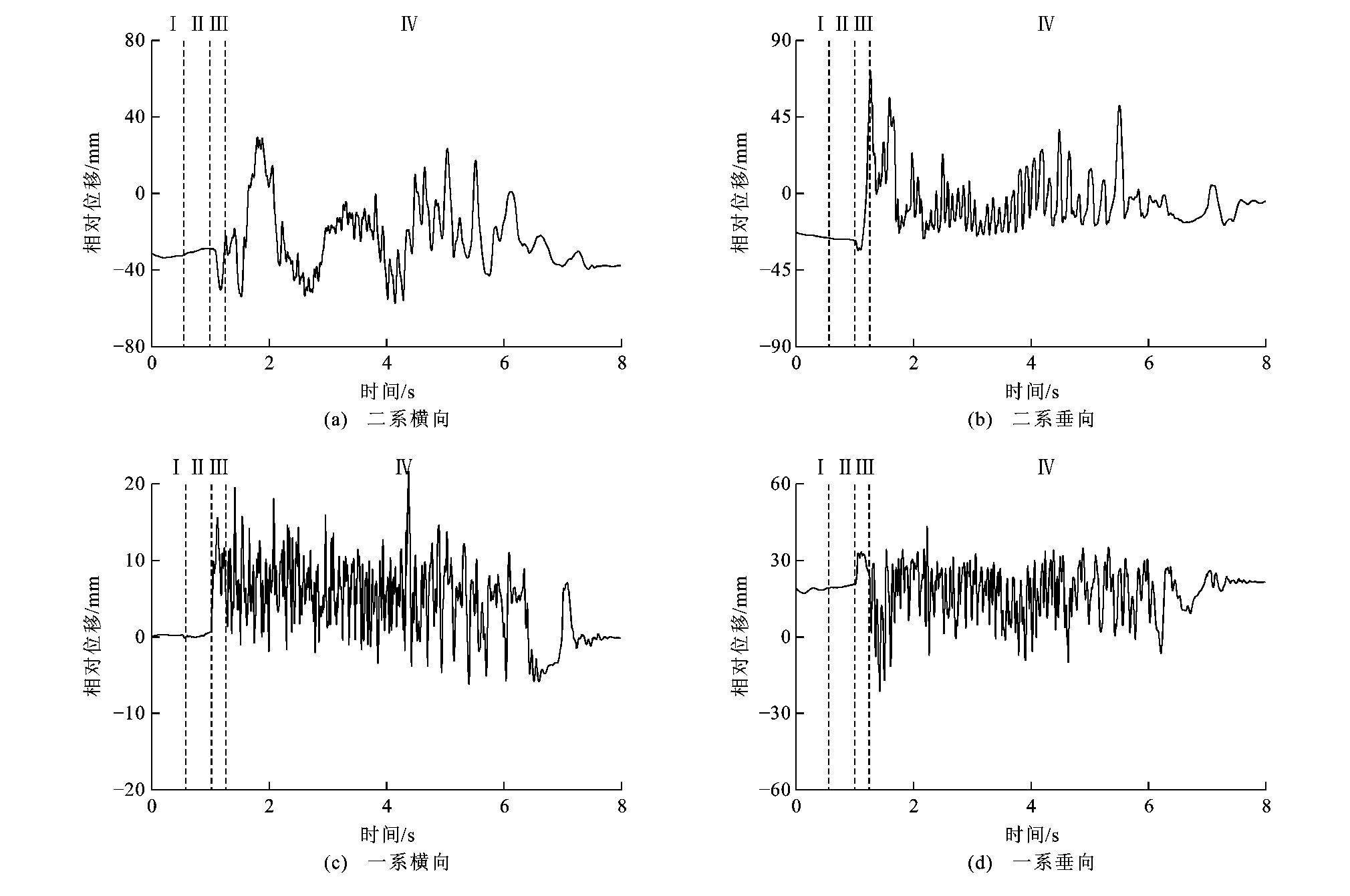
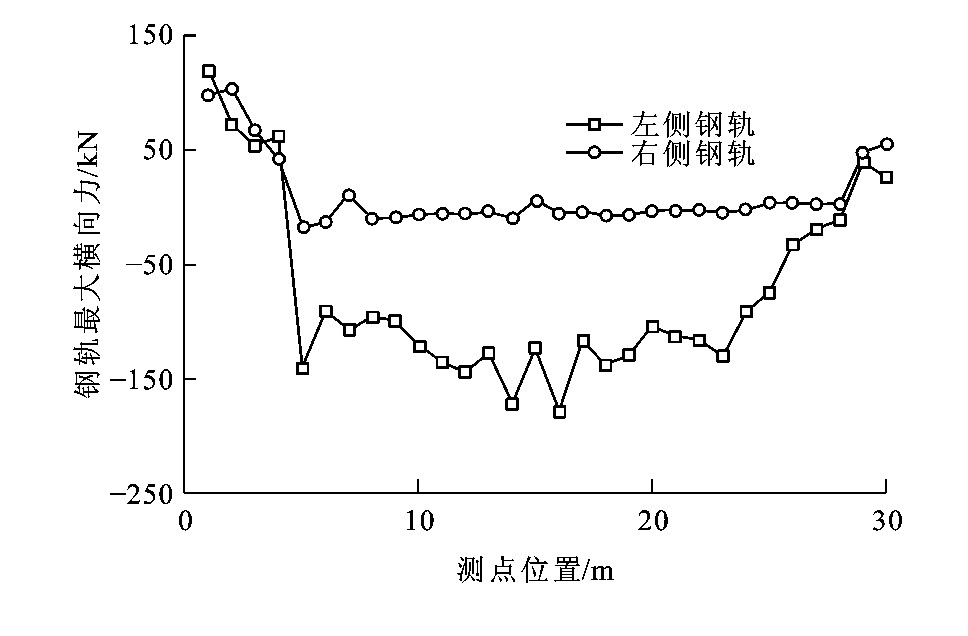
摘要:
在动车轴箱下方安装防护装置, 进行线路低速脱轨试验。车辆借助脱轨器完成脱轨, 利用应变片、加速度和位移传感器采集脱轨车辆的动态响应, 采用高速摄像仪和视频摄像仪分别记录了脱轨车辆的运动姿态。基于试验数据, 评估了脱轨条件下钢轨抗倾翻能力, 验证了脱轨安全防护装置的性能, 分析了动车脱轨后的动态响应和脱轨速度、车辆质量和线路对动态响应的影响。试验结果表明: 当动车低速脱轨时, 防护装置撞击钢轨的最大横向力为177.18kN, 小于钢轨横向抵抗力510.00kN, 因此, 脱轨安全防护装置可以扣住钢轨外侧, 有效限制脱轨车辆的横向移动。车辆的脱轨过程分为惰行、轨上运动、落地和路基滑行4个阶段, 各阶段的动态响应均随脱轨速度和车辆质量的增大而增大。当动车脱轨速度为22km·h
-1
时, CRTSⅡ型双块式无砟轨道的脱轨距离约为15.80m, CRTSⅠ型板式无砟轨道的脱轨距离约为20.87m, 因此, CRTSⅡ型双块式无砟轨道的轨枕可以起到减速带的作用, 减小脱轨距离。
更多>
2015, 15(4): 52-60.
doi:
10.19818/j.cnki.1671-1637.2015.04.007
摘要
(
1665
)
HTML
(
393
)
PDF (616KB)
(
852
)
引用
(
)
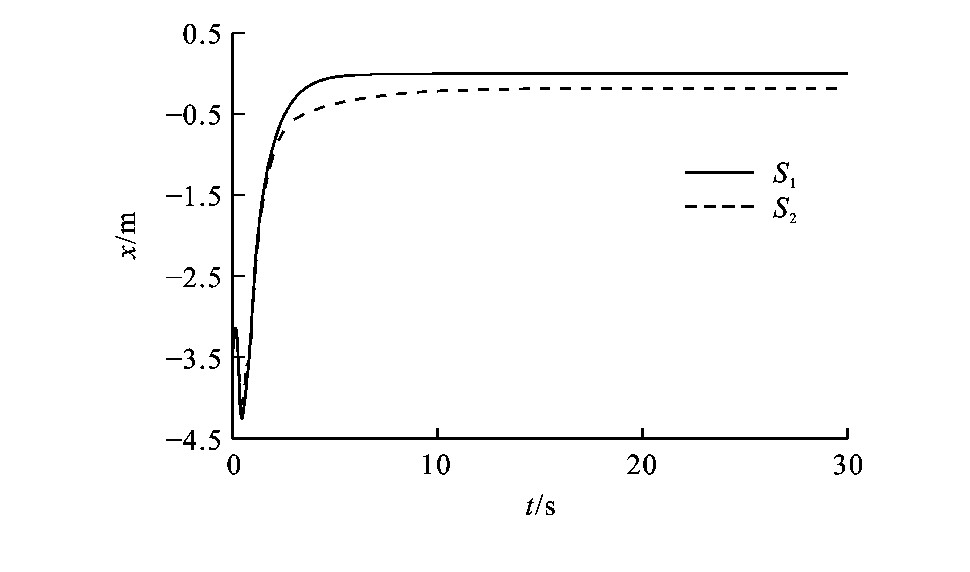
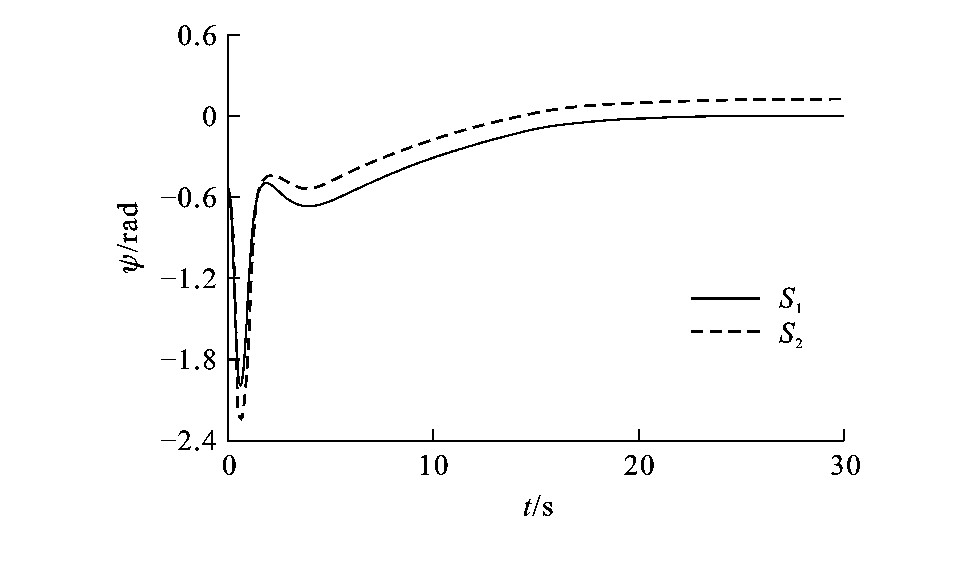
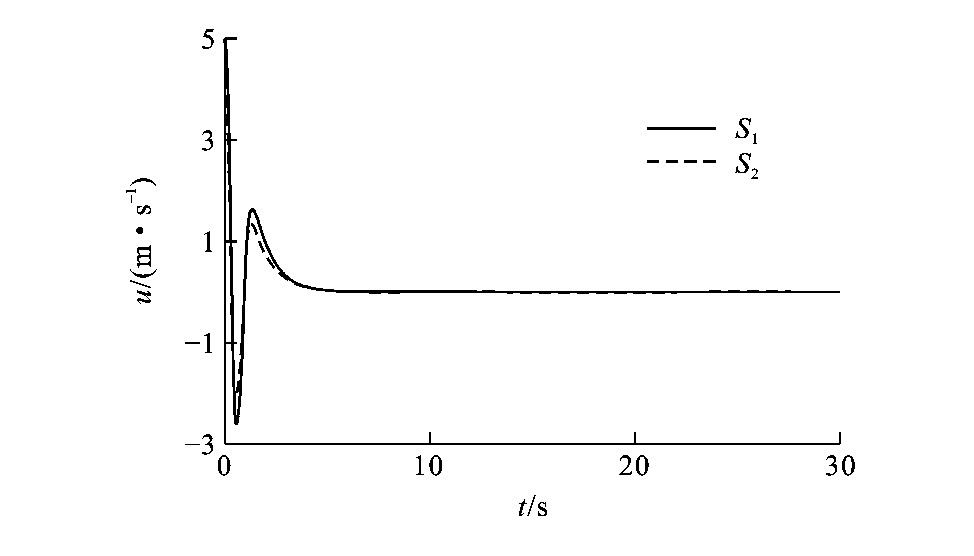
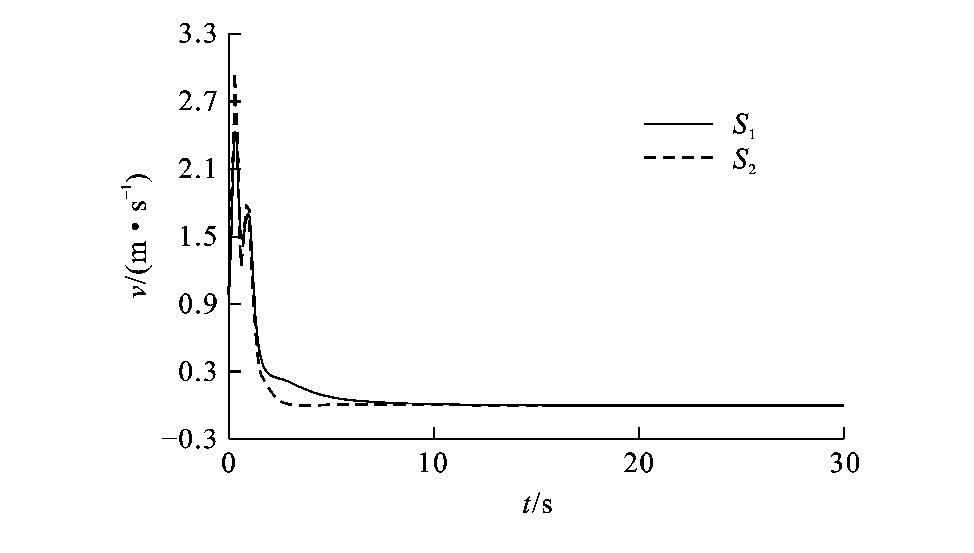
极坐标系下的欠驱动无人艇分块反步镇定控制
董早鹏
,
万磊
,
李岳明
,
张磊
,
张国成
,
廖煜雷
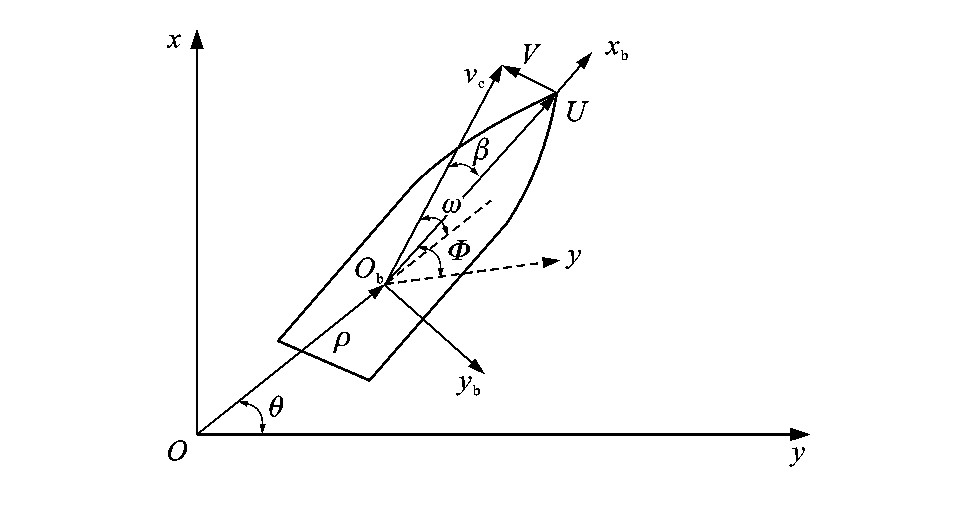
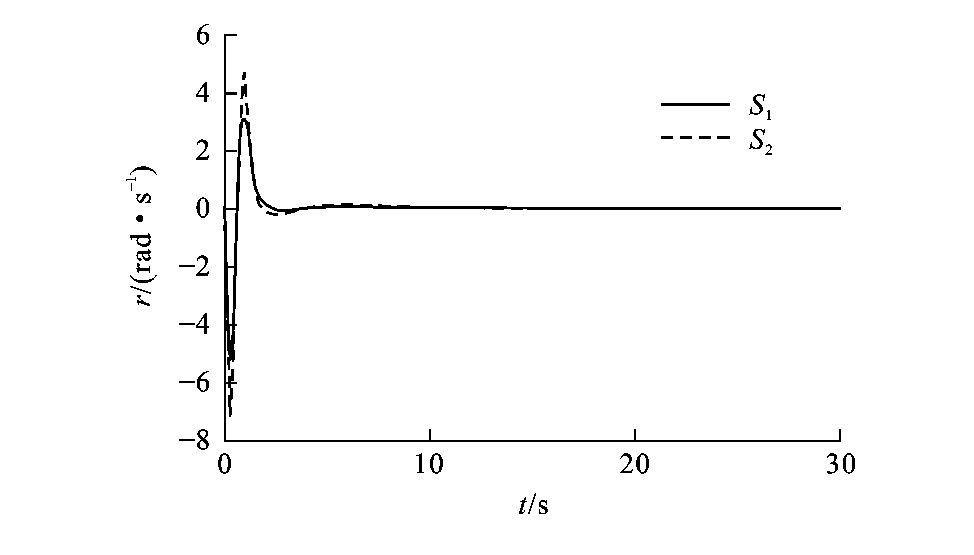
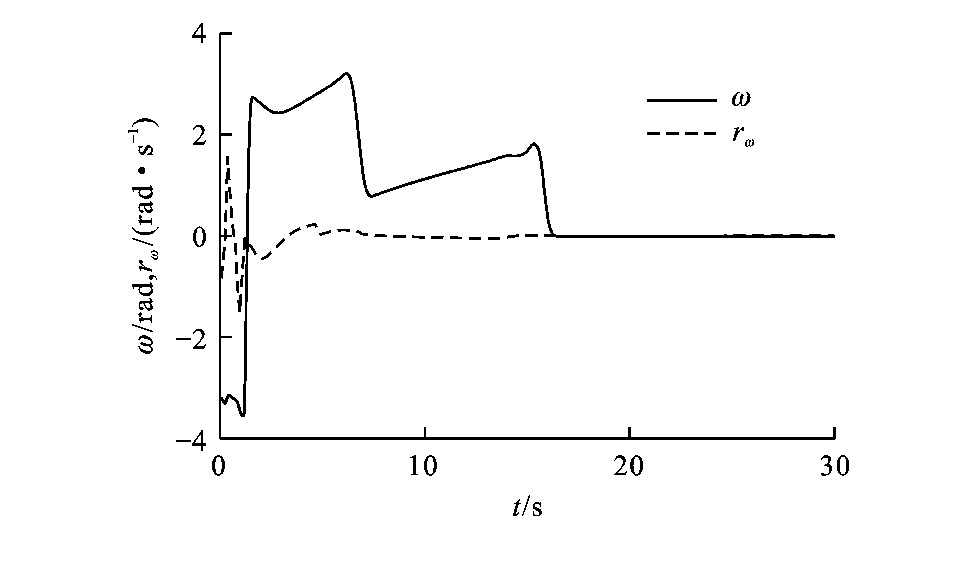
摘要:
针对非对称欠驱动无人艇的镇定控制问题, 提出了基于极坐标系的一类多输入多输出分块反步法, 设计了一种漂角极坐标系作为艇体的动坐标系, 以极坐标系代替直角坐标系作为大地坐标系, 将漂角、艏向角与极角融合处理, 获得了极坐标系下无人艇水平面运动的运动学和动力学方程, 使直角坐标系下的欠驱动问题简化为极坐标系下的全驱动问题。结合李亚普诺夫稳定性理论和反步法设计了一种极坐标系下的多输入多输出分块反步镇定控制律, 实现了非对称欠驱动无人艇的镇定控制。在实验室半物理仿真平台下, 以某长度为1.2m、质量为17.5kg的无人艇模型为实例进行镇定控制仿真试验, 对比分析了分块反步镇定控制算法与传统基于对称模型的反步控制算法的控制结果。分析结果表明: 分块反步镇定控制算法的位姿收敛速度提高了约10s, 位置和艏向角镇定误差分别降低了约0.3m和10°, 线速度和角速度超调量分别降低了约0.6m·s
-1
和2rad·s
-1
, 因此, 基于非对称模型的极坐标系下欠驱动分块反步法具有较大的可靠性、稳定性和精确性。
更多>
2015, 15(4): 61-68.
doi:
10.19818/j.cnki.1671-1637.2015.04.008
摘要
(
2232
)
HTML
(
601
)
PDF (384KB)
(
786
)
引用
(
)
船舶主机能效模型
范爱龙
,
严新平
,
尹奇志
,
孙星
,
陈前昆
,
张永波
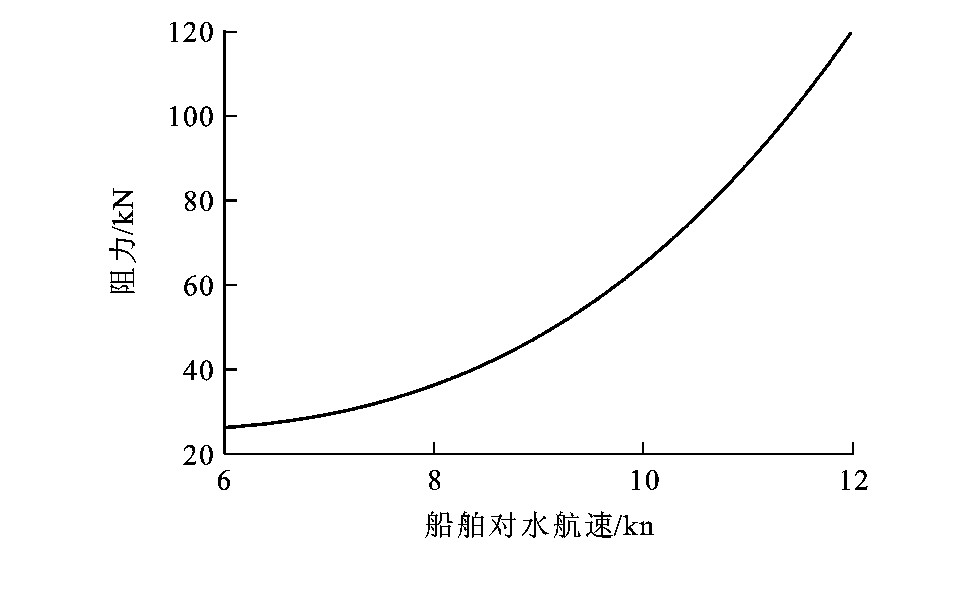
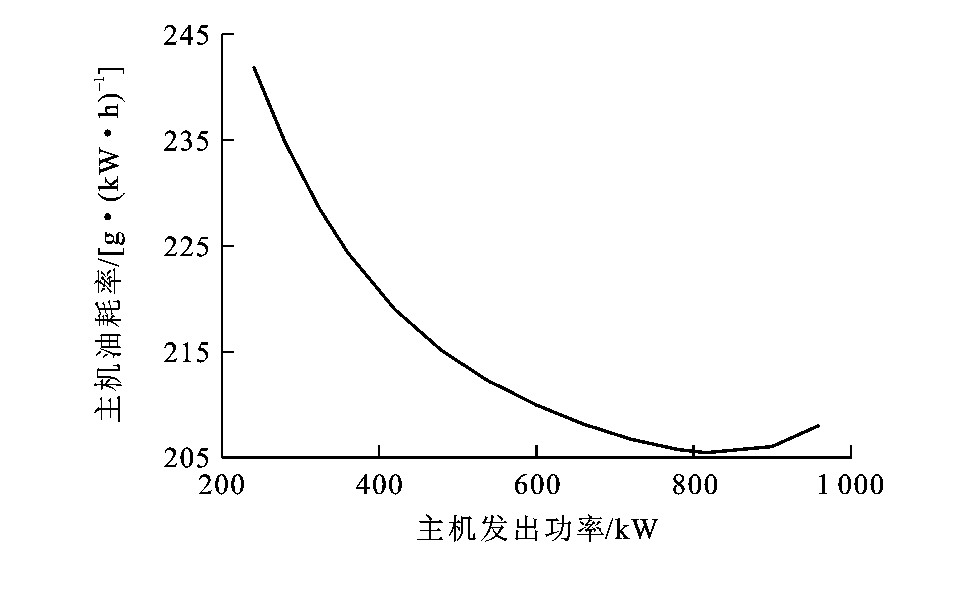
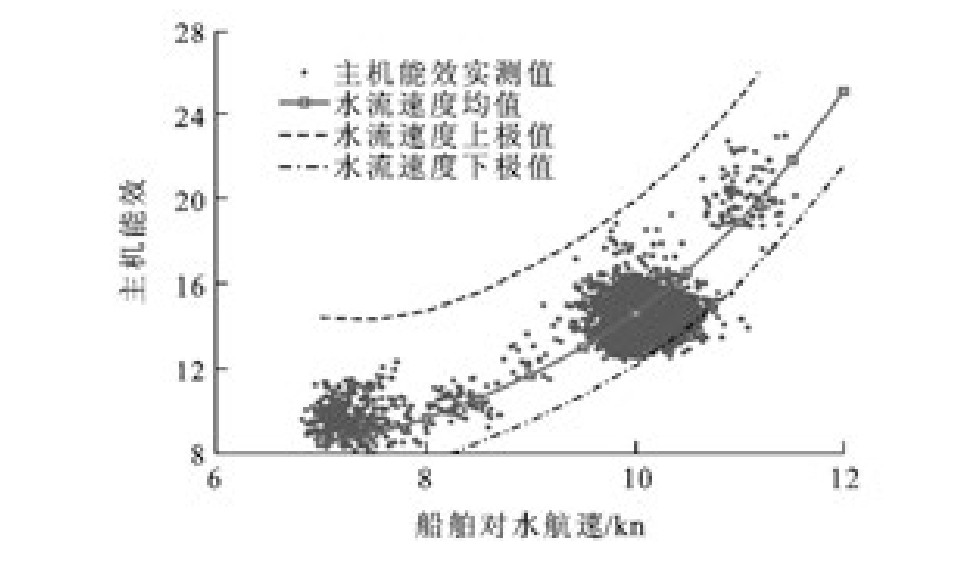
摘要:
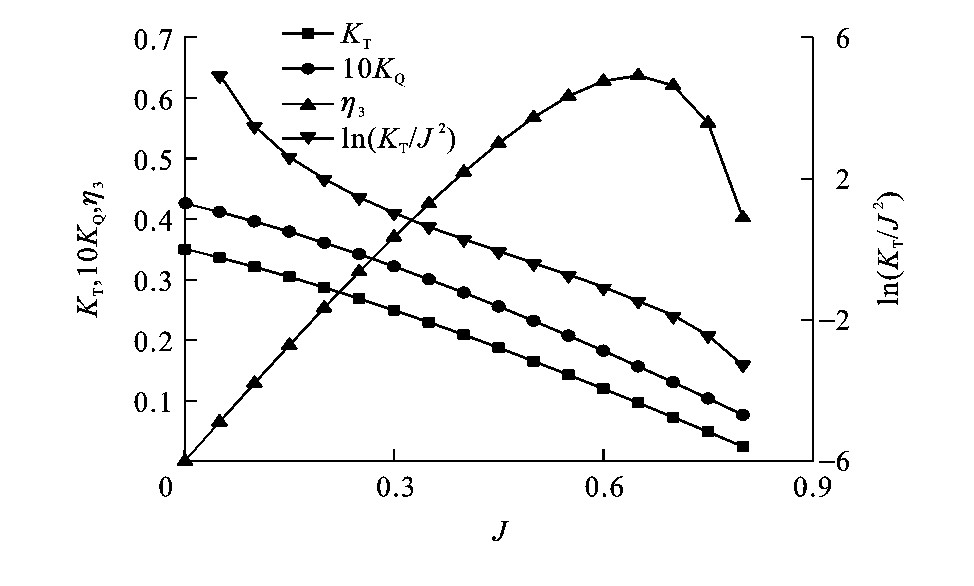
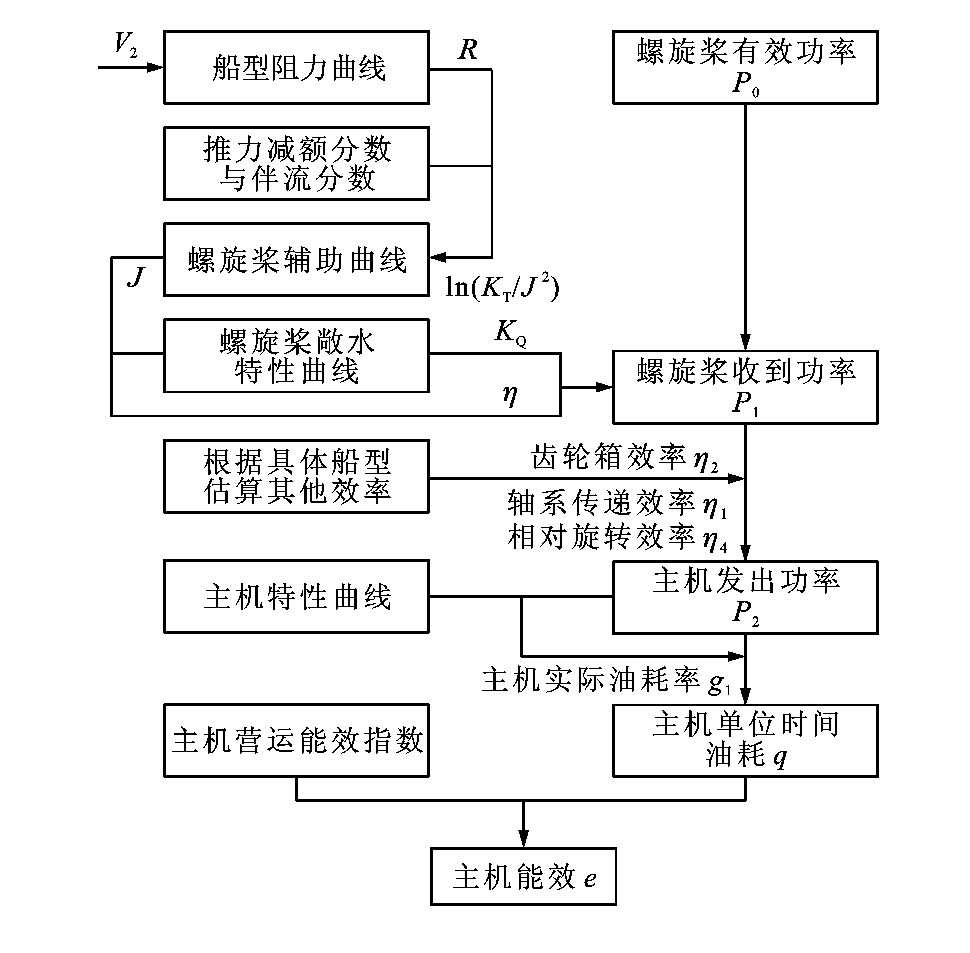
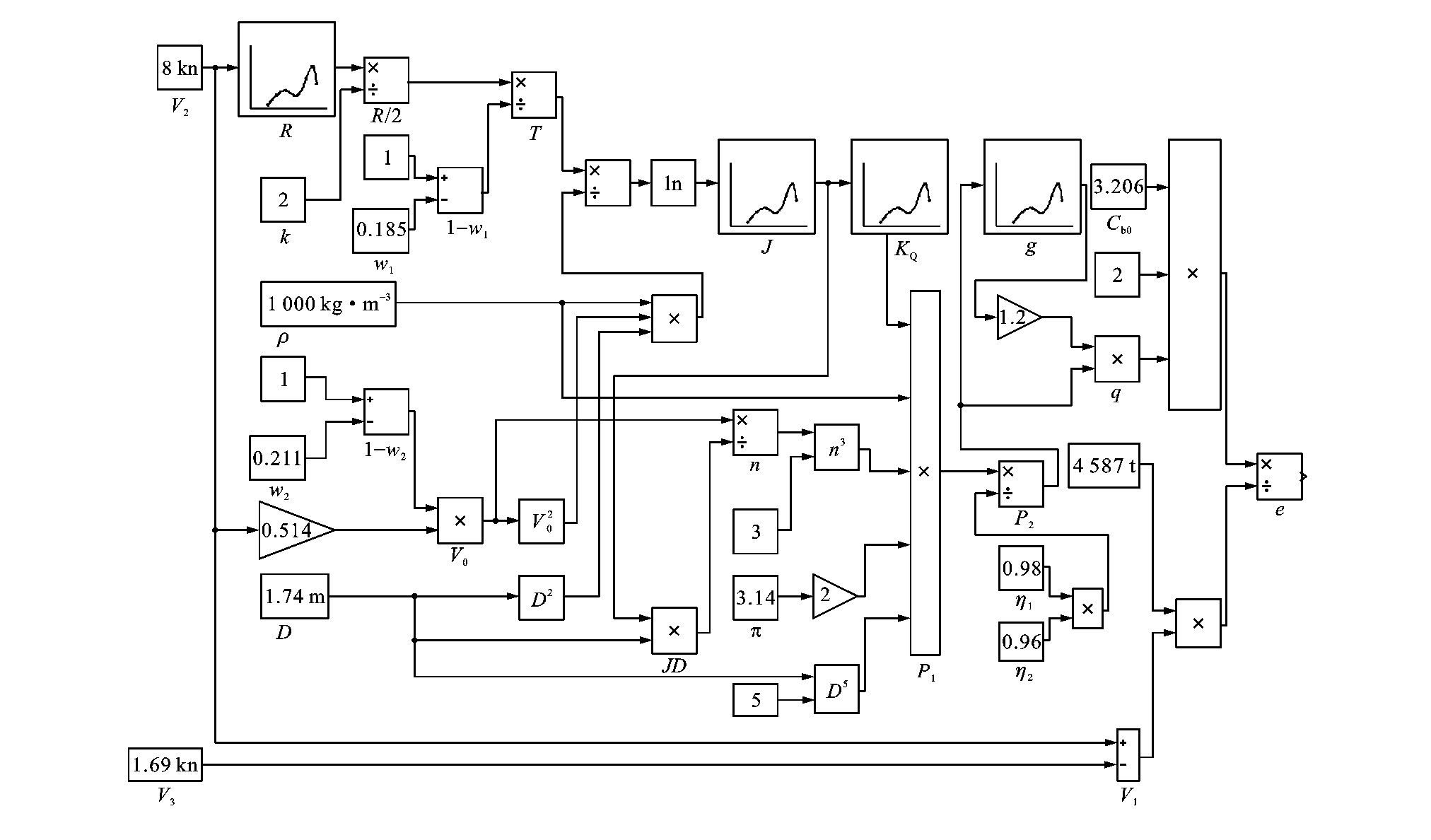
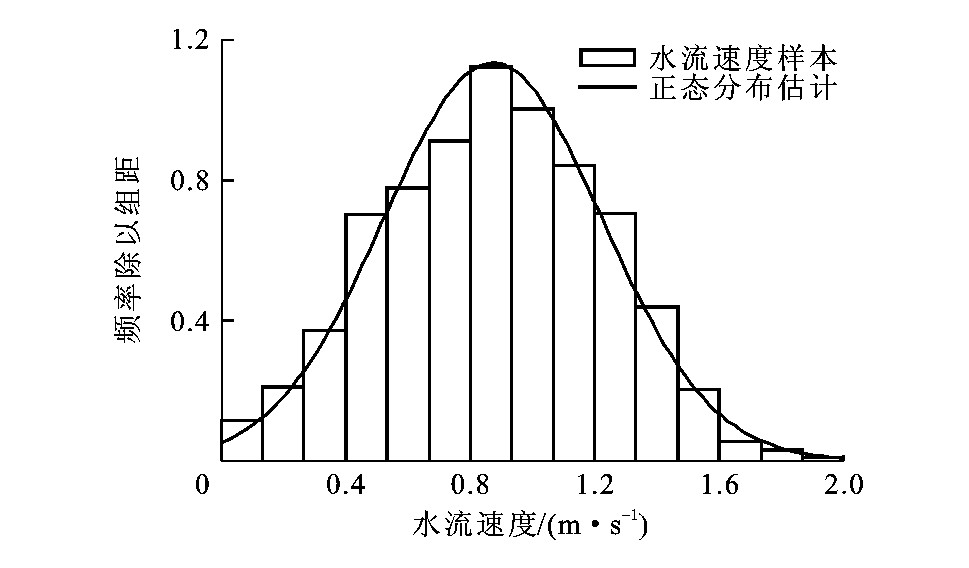
根据船、机、桨关系, 以船舶动力装置的能量传递为基础, 基于MATLAB/Simulink仿真平台建立了主机能效模型。以某内河旅游船舶为研究对象, 根据船体与主机参数, 利用回归多项式法得到螺旋桨敞水特性曲线。在船舶上安装了油耗仪等传感器, 采集了主机瞬时油耗、船舶对地航速、对水航速等数据, 并计算了主机的实际能效。针对实船采集数据, 分析了航道水流速度的分布特征。基于仿真模型, 计算了船舶在不同航道水流速度与对水航速下的主机能效, 比较分析了实测数据与仿真结果, 并对模型进行了验证。验证结果表明: 航道水流速度偏度为-0.033, 总体服从正态分布; 船舶实际主机能效与对水航速之间不是一一对应关系, 而是相关系数为0.824的散点分布; 船舶主机能效模型能够精确地表征船舶在航行过程中的主机能效水平及其变化规律, 误差不大于10.5%。
更多>
2015, 15(4): 69-76.
doi:
10.19818/j.cnki.1671-1637.2015.04.009
摘要
(
2624
)
HTML
(
733
)
PDF (429KB)
(
1486
)
引用
(
)
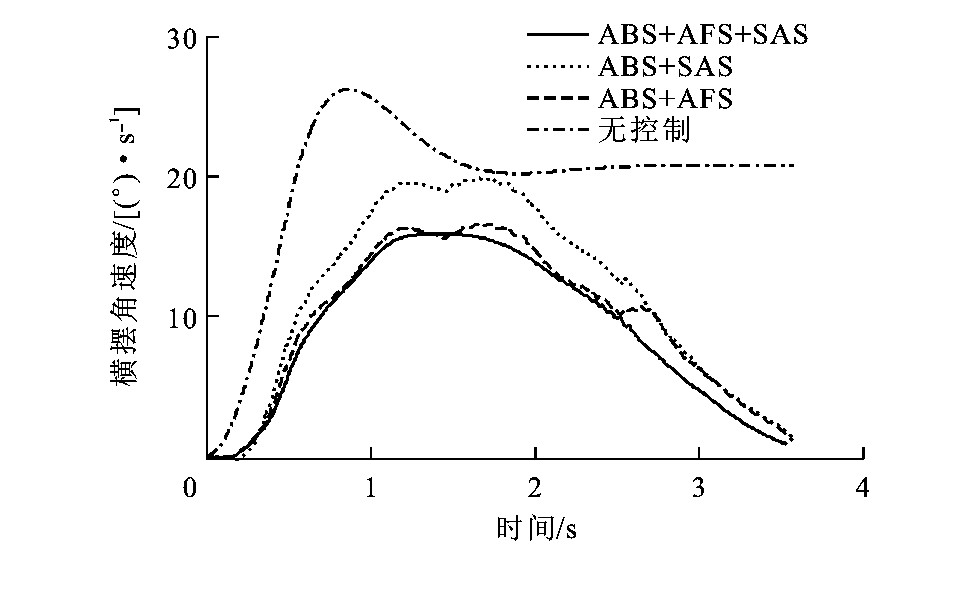
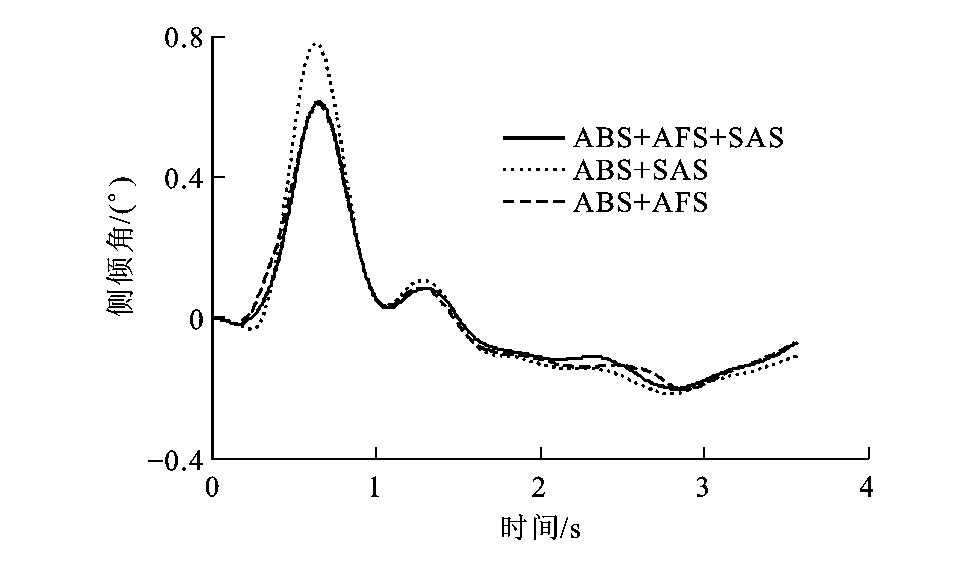
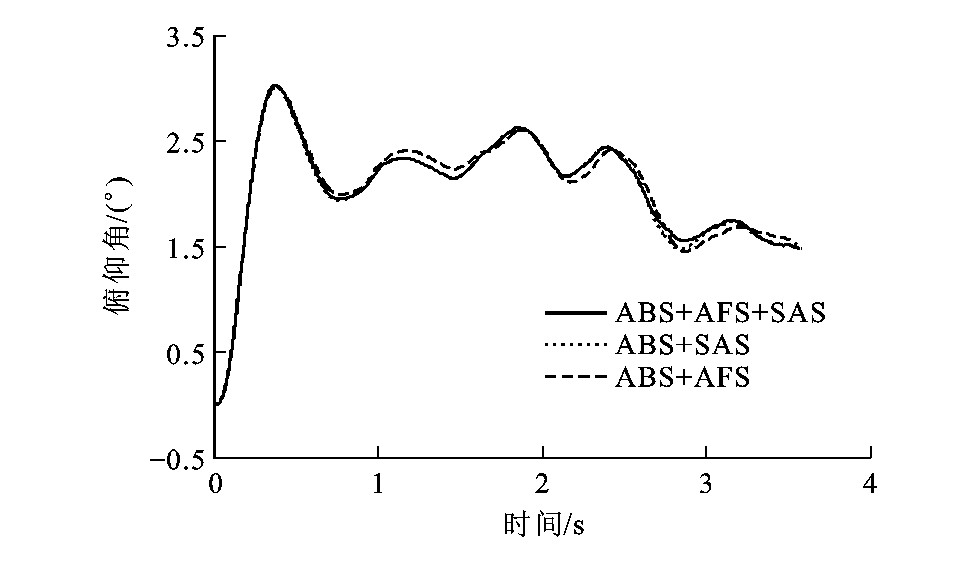
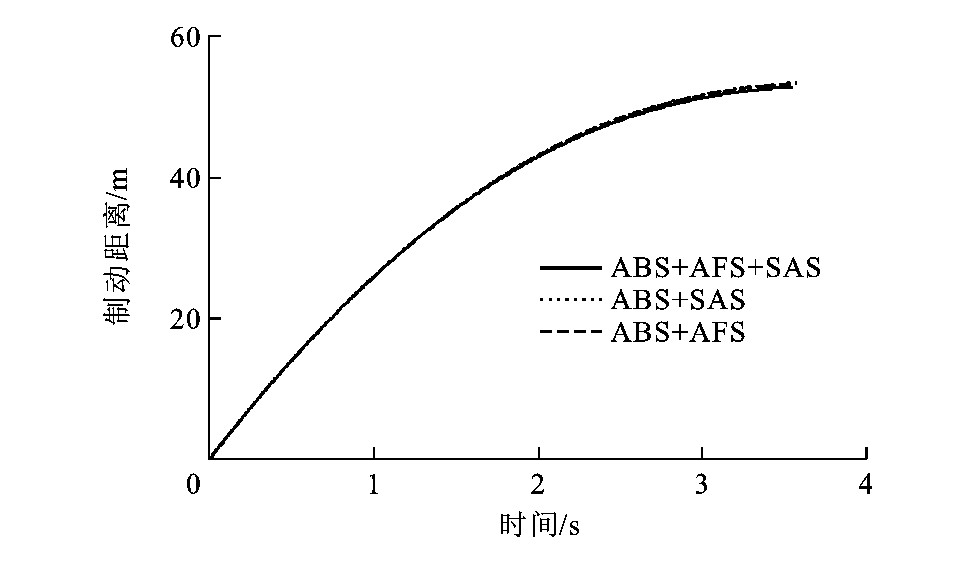
基于底盘多子系统协调控制的车辆稳定性控制
赵树恩
,
李玉玲
,
余强
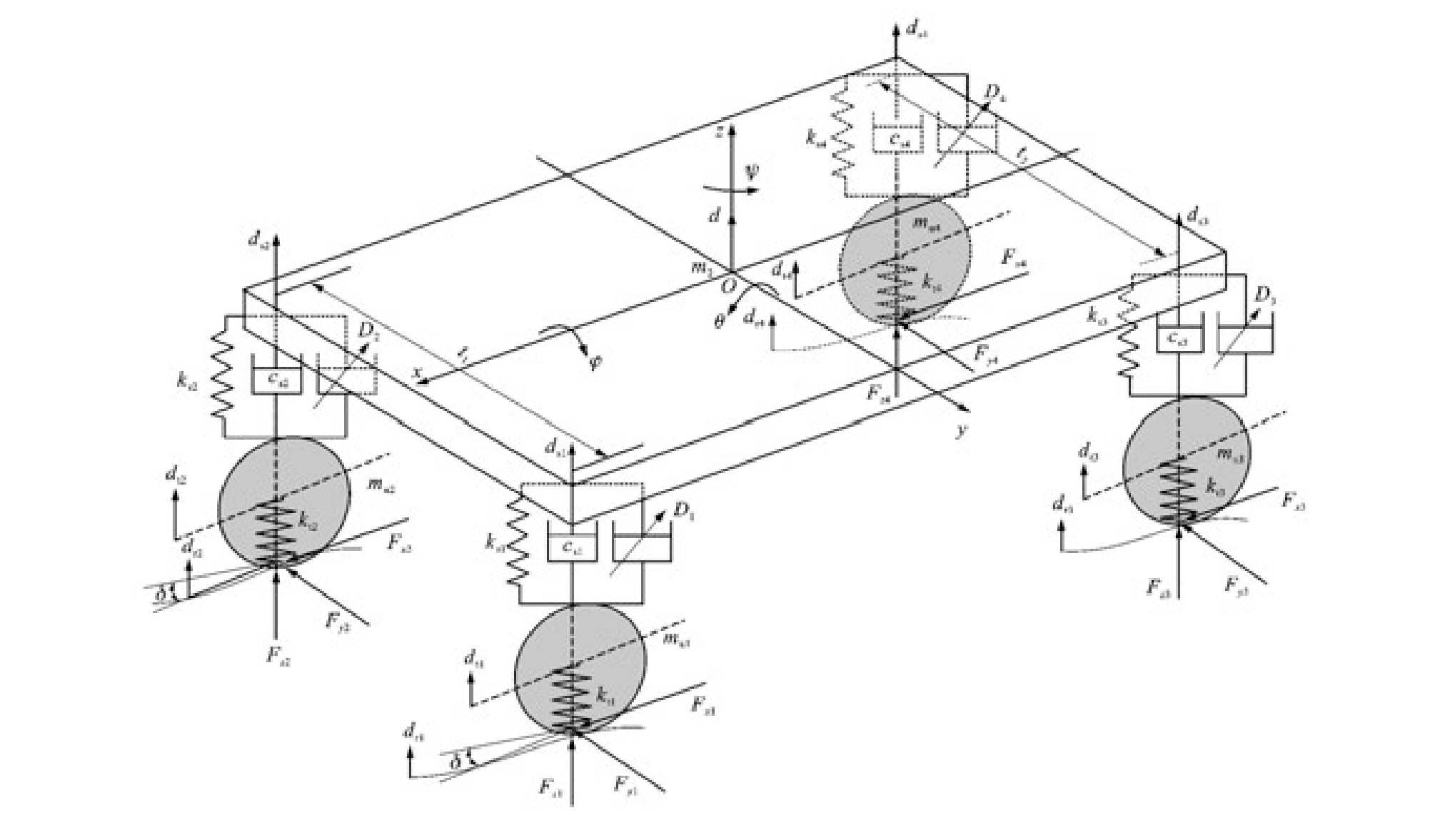
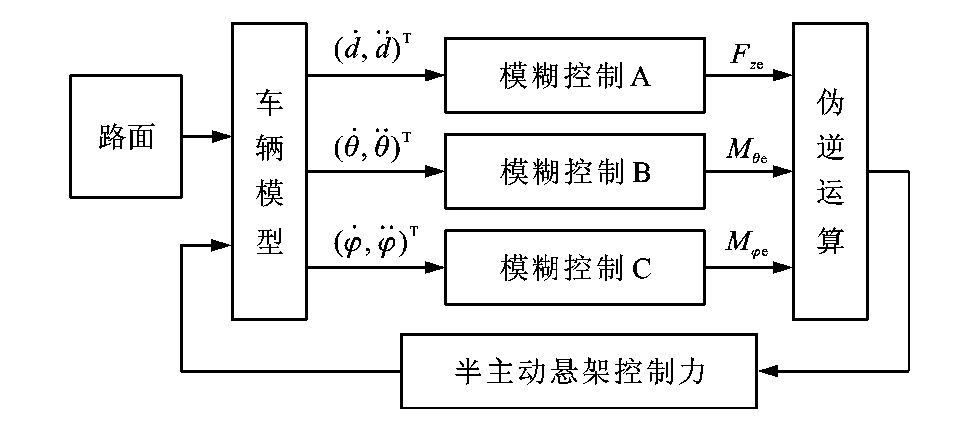
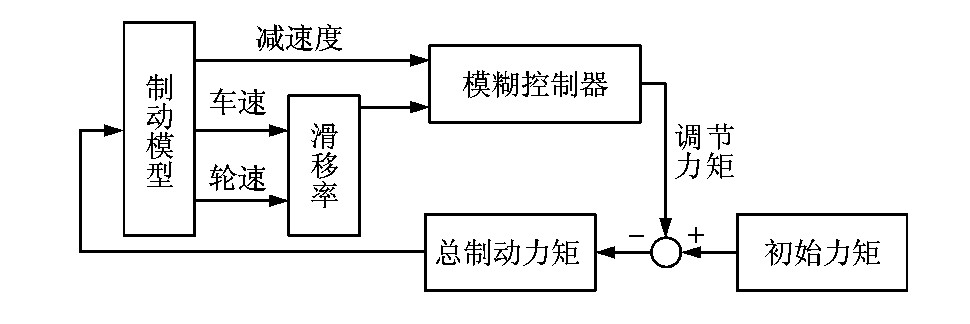
摘要:
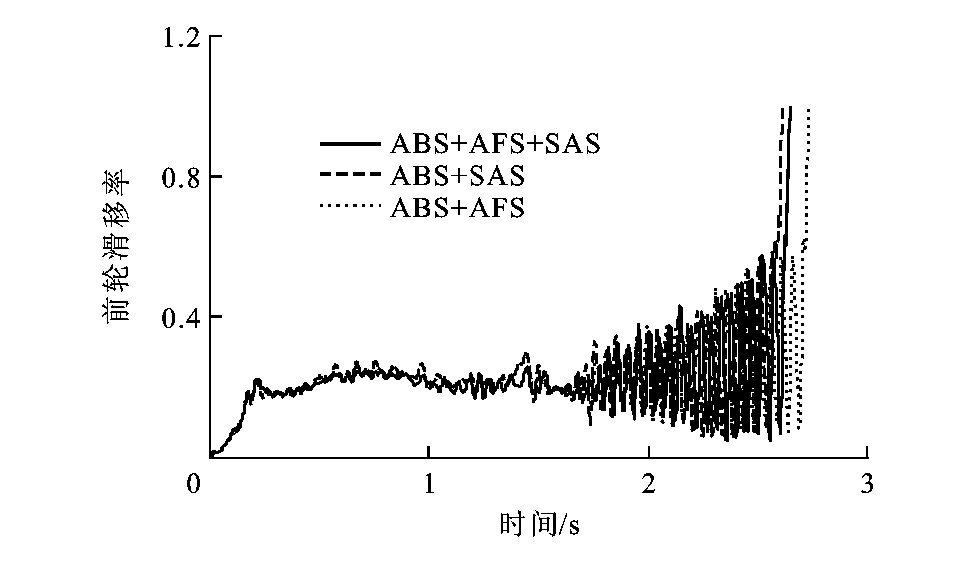
针对底盘关键子系统对车辆行驶稳定性影响能力与有效作用区域的差异, 综合考虑轮胎的非线性特性与各子系统间动力学耦合关系, 建立整车14自由度非线性动力学模型, 分别运用非线性H∞控制和模糊控制对转向、悬架和制动子系统进行控制性能研究, 采用多级递阶控制理论设计了组织级、协调级和执行级的车辆稳定性多级协调控制系统。运用滑模控制理论与轮胎逆模型将组织级得到的保持车辆行驶稳定性所需的广义目标控制力和力矩转化为轮胎侧偏角和滑移率, 再基于功能分配原理对各子系统控制功能进行协调, 实现了底盘复杂系统的功能解耦, 并对整车稳定性协调控制系统进行了仿真分析。仿真结果表明: 防抱死制动系统与半主动悬架系统联合控制对车辆稳定性的控制效果相对较差, 主动前轮转向的加入可以明显改善车辆的操纵稳定性。相对于汽车底盘子系统联合控制, 多级递阶协调控制能更好地改善整车行驶稳定性, 使制动距离减小, 保持滑移率基本在目标值0.2附近。
更多>
2015, 15(4): 77-85.
doi:
10.19818/j.cnki.1671-1637.2015.04.010
摘要
(
2133
)
HTML
(
583
)
PDF (495KB)
(
864
)
引用
(
)
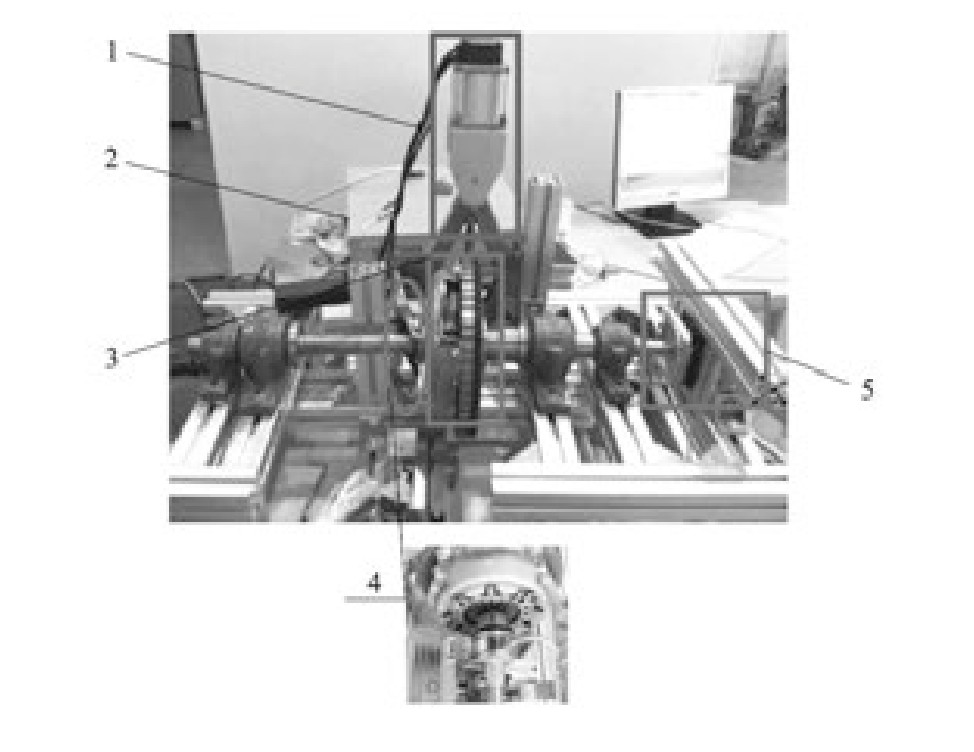
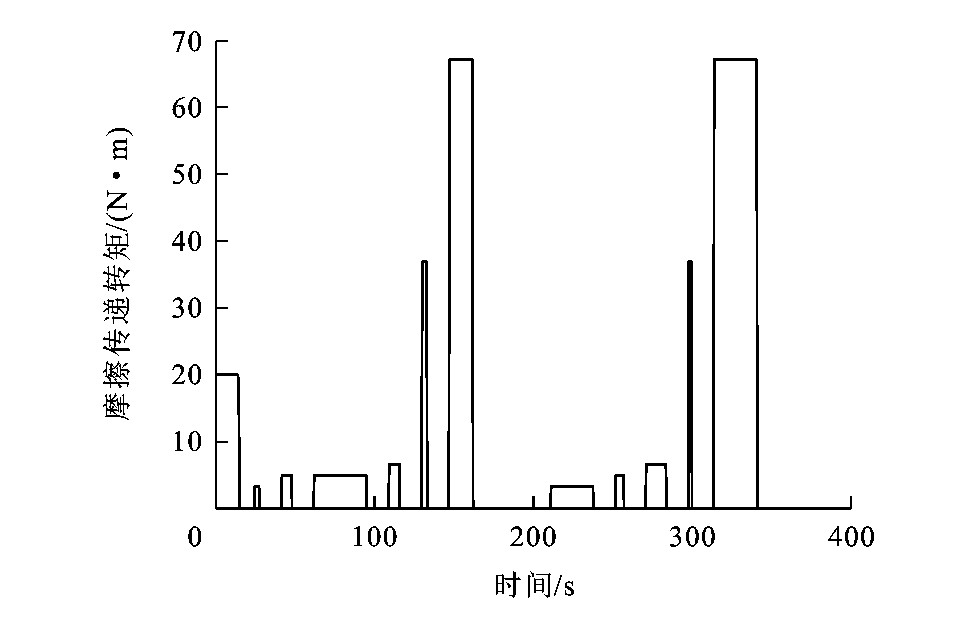
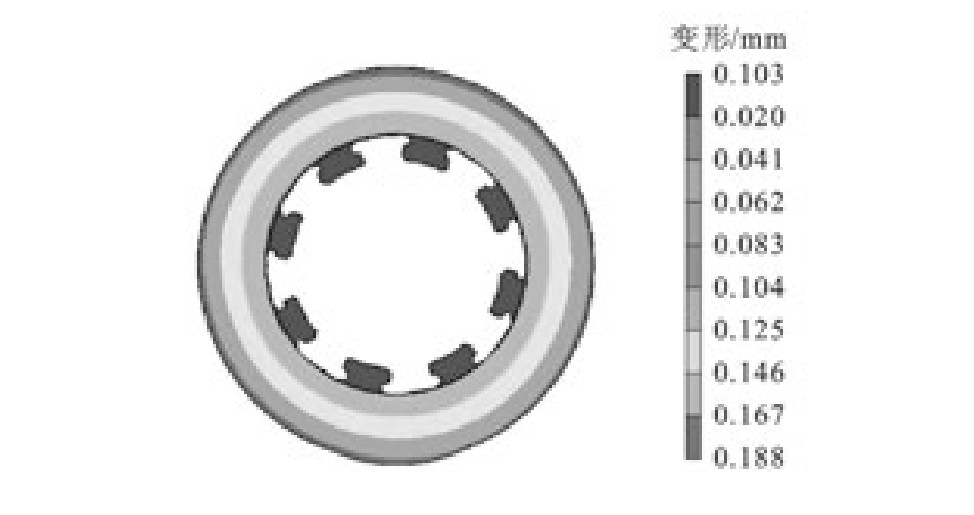
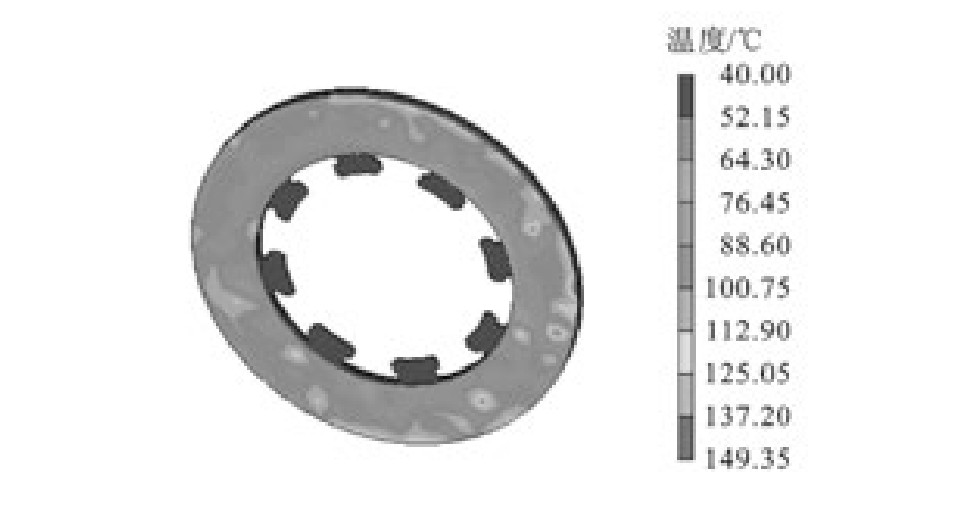
干式离合器摩擦片温度分布
王阳阳
,
刘茜
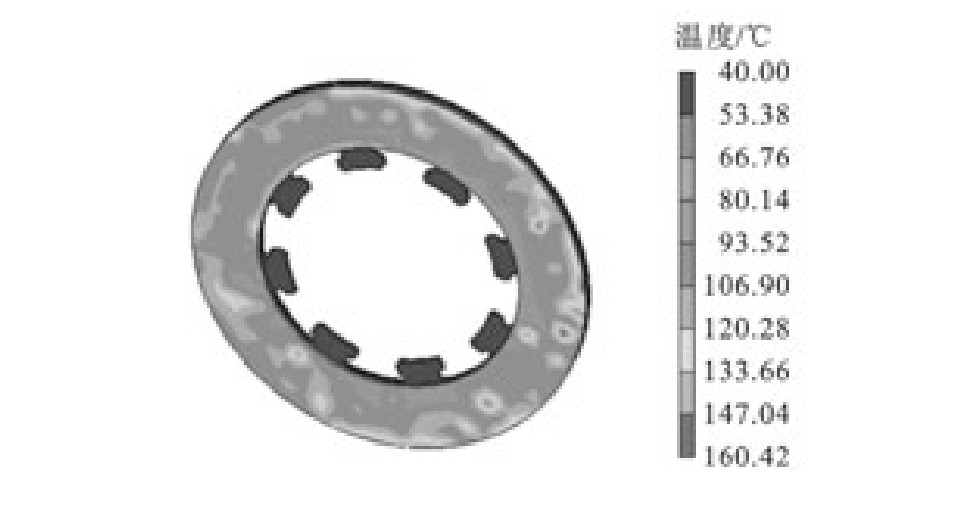
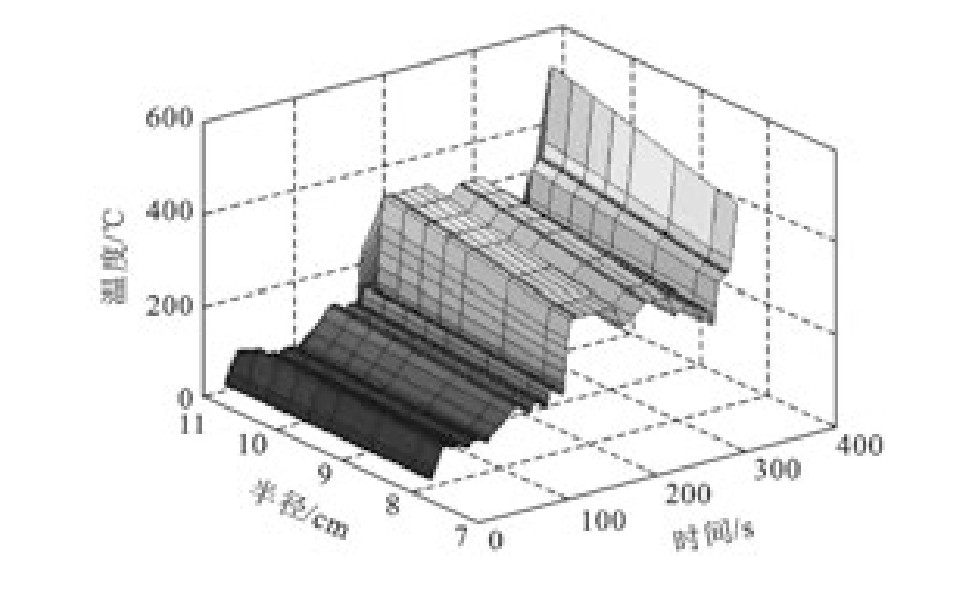
摘要:
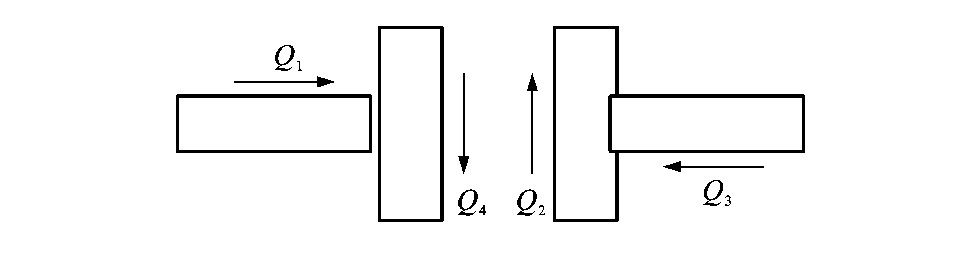
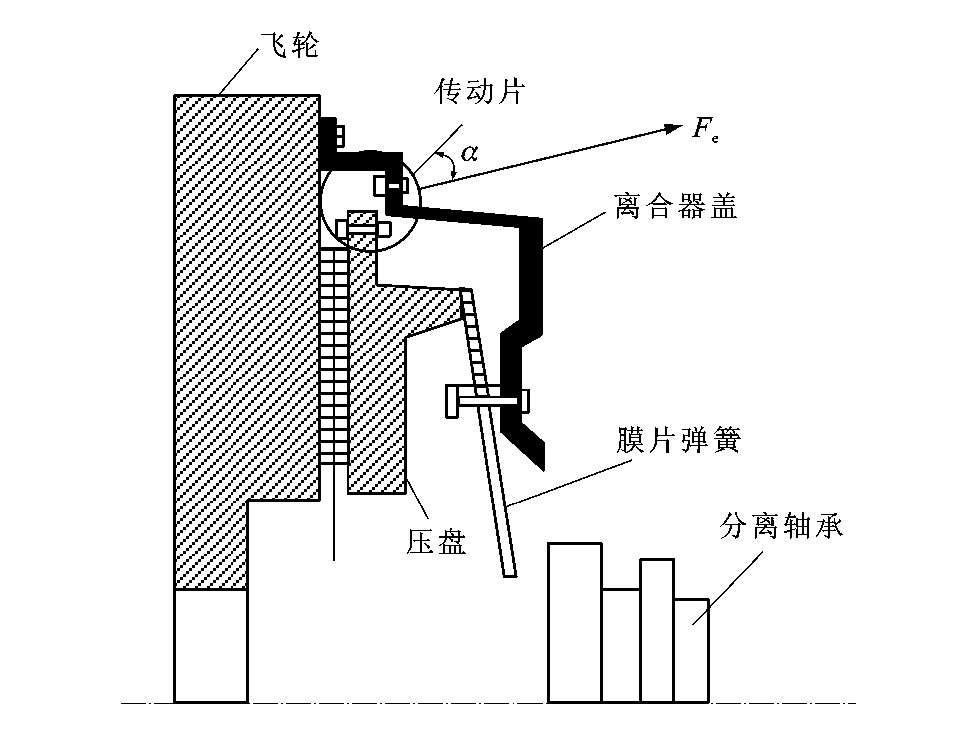
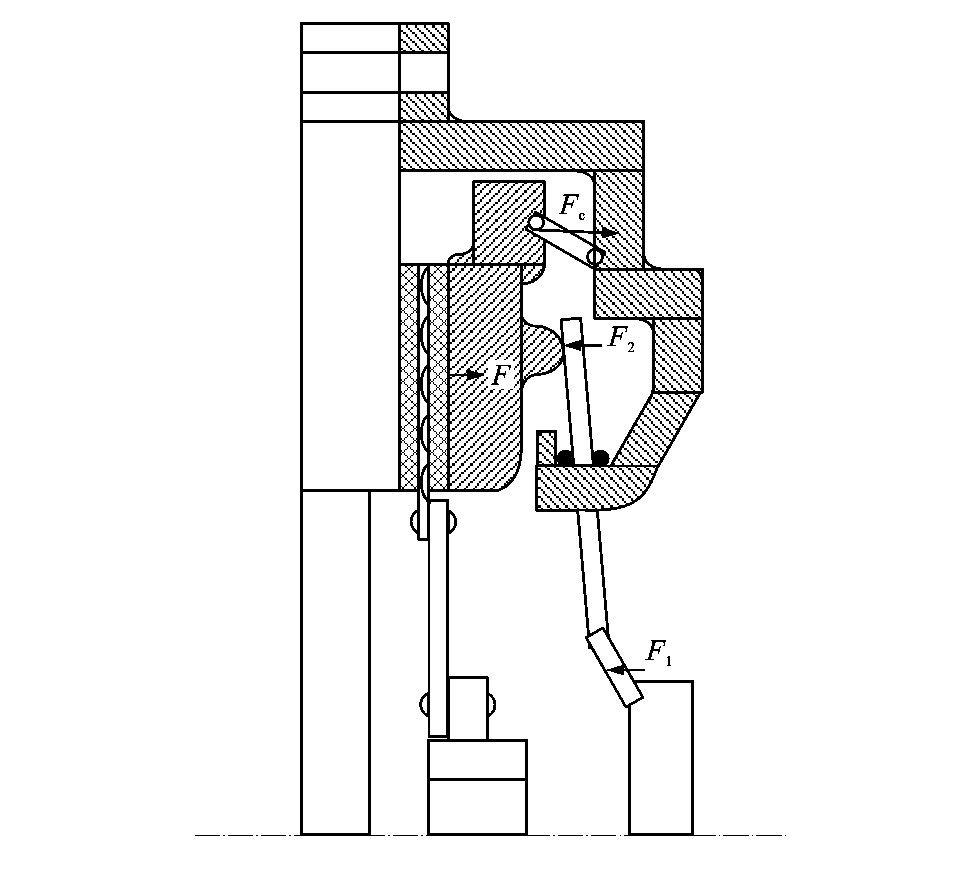
针对干式离合器在汽车传动过程中产生的热失效问题, 研究了摩擦片的温度分布。基于干式离合器的工作原理, 建立了包括主从动部分、摩擦片压力和摩擦因数在内的离合器接合模型。结合轴向弹性作用元件特性和分离轴承与膜片弹簧接触面旋转而与分离拨叉接触面不旋转的结构特点, 将环状压力传感器布置在与分离拨叉的接触面, 估计了实时离合器摩擦片压力。通过干式离合器试验台和摩擦因数模型, 求解了在连续工作400s的摩擦传递转矩和滑摩功, 计算了环境吸热、摩擦生热与对流散热3种边界的摩擦片热负荷, 分析了瞬时冲击接合与频繁接合2种工况下的摩擦片热变形。分析结果表明: 在离合器瞬时冲击2s的接合工况下, 摩擦片热变形最大, 可达0.188mm, 变形后摩擦片的温度显著升高; 在频繁接合工况下, 边界2滑摩热负荷对离合器接合前200s的摩擦片温度分布起主要作用, 边界2、3对流热同时对200s后的温度分布起重要作用。
更多>
2015, 15(4): 86-92.
doi:
10.19818/j.cnki.1671-1637.2015.04.011
摘要
(
1772
)
HTML
(
654
)
PDF (396KB)
(
1007
)
引用
(
)
交通运输规划与管理
高速公路半幅封闭施工区限速标志效能试验
贾兴利
,
富志鹏
,
许金良
,
陈文辉
,
景立竹
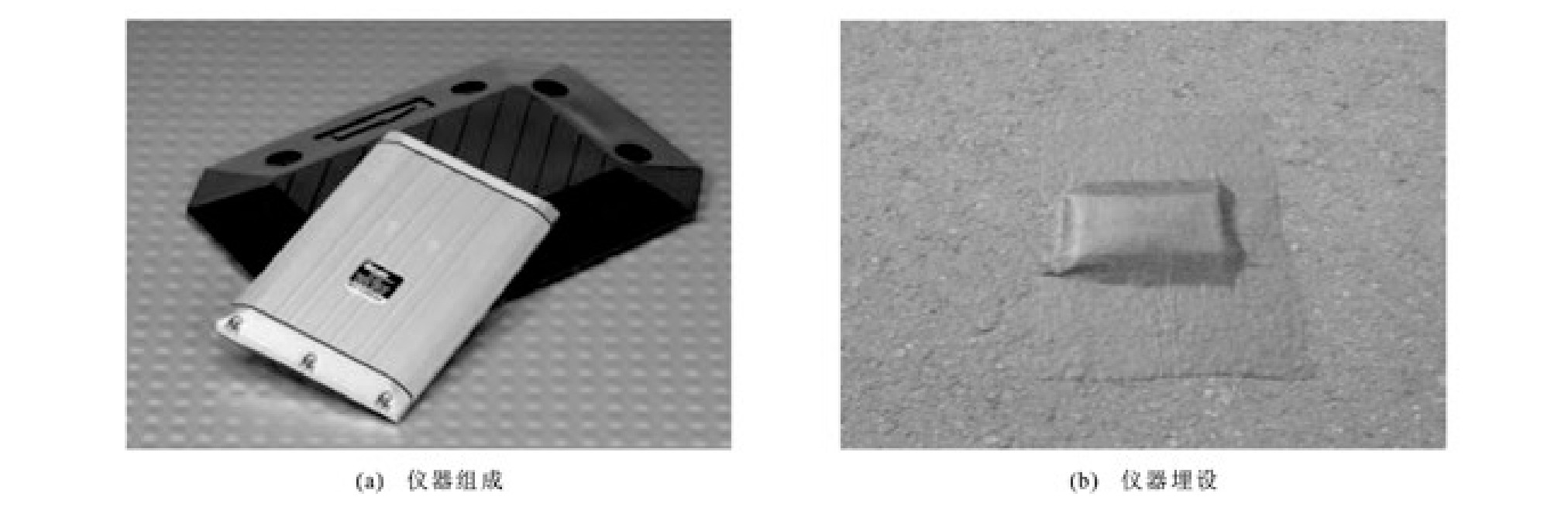
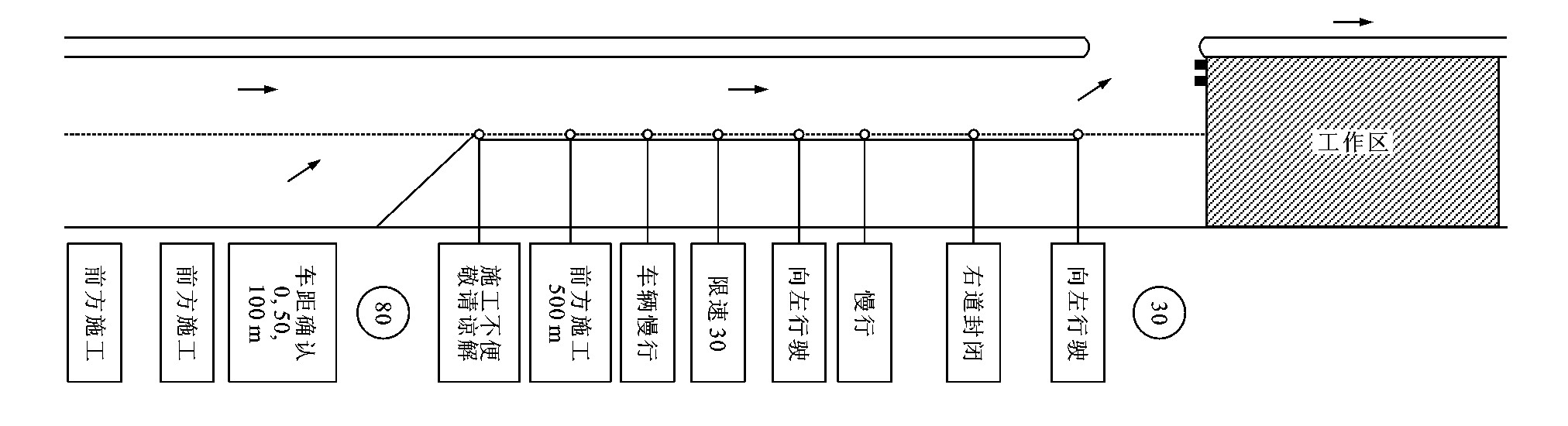
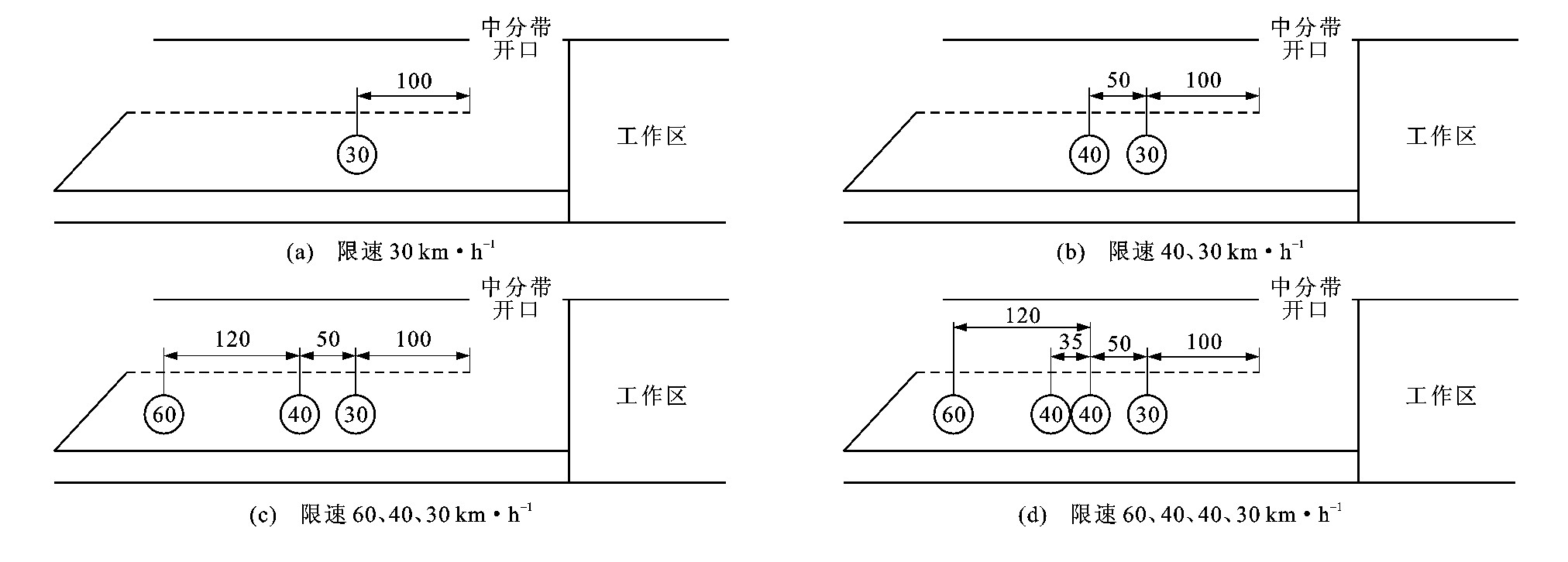
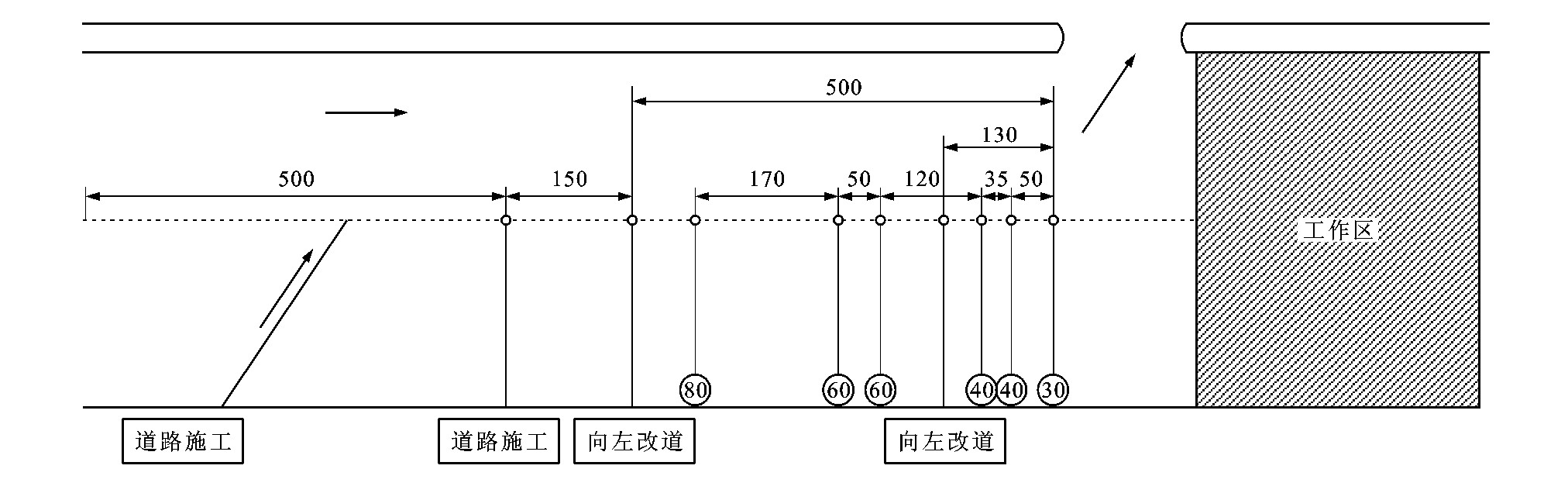
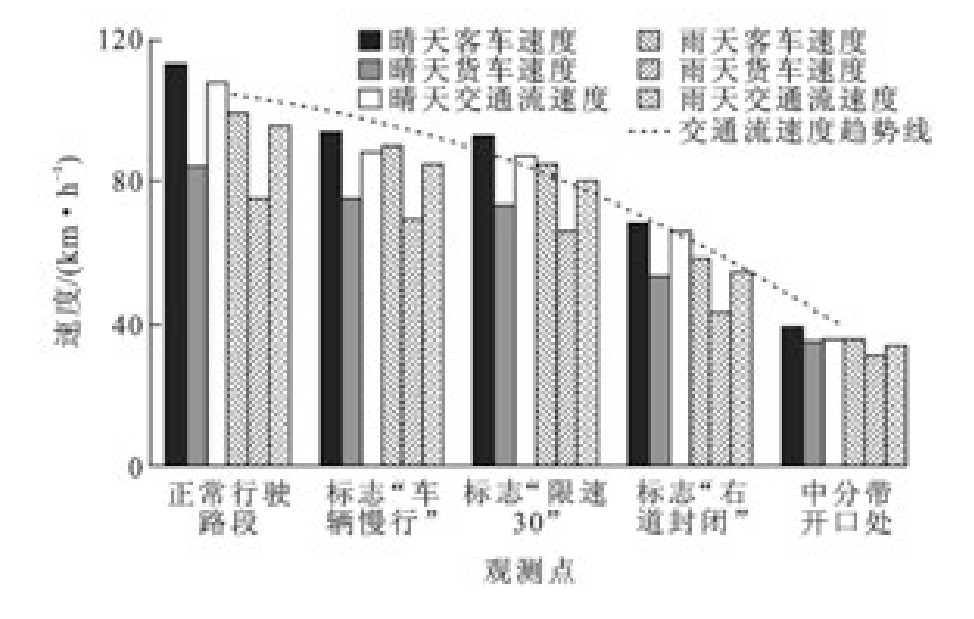
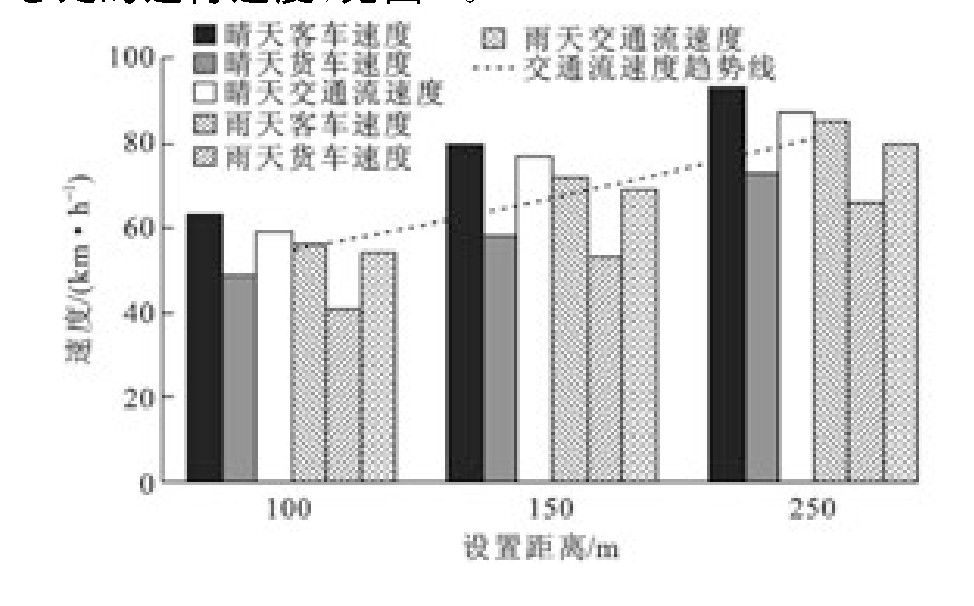
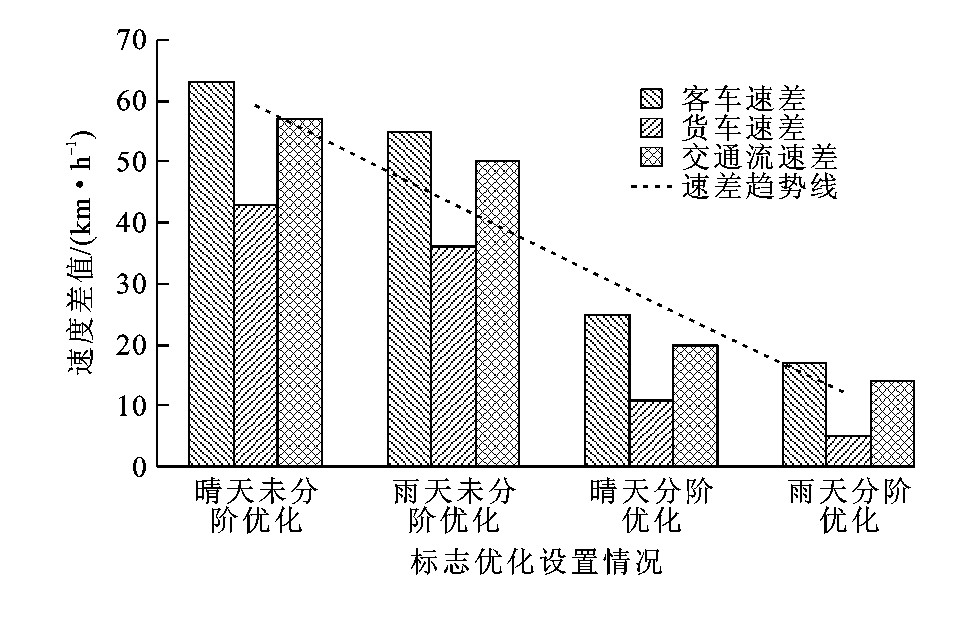
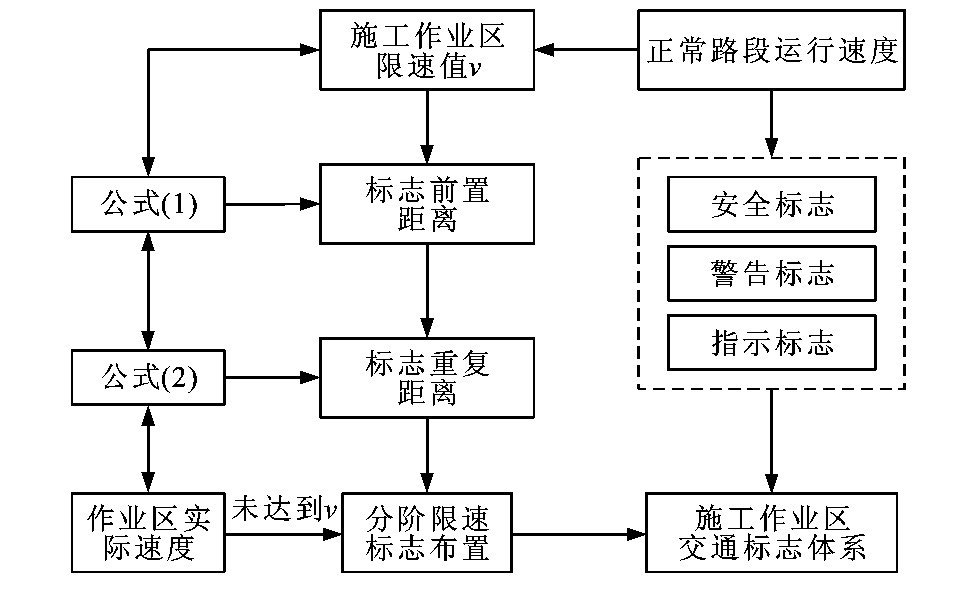
摘要:
采用现场试验与统计分析, 研究了高速公路半幅封闭施工作业区交通标志尤其是限速标志的警示效能, 提出了分阶限速方案和交通标志效能试验方案, 选择典型路段开展了既有交通标志效能试验、限速标志位置试验、分阶限速效能试验和优化后交通标志效能试验。试验结果表明: 既有交通标志尤其是限速标志效能不足, 试验路段客货车经过限速标志后车速远高于限速值, 且速度降低幅度很小。通过分阶限速优化交通标志设置, 施工作业区车辆速度明显降低, 客车速度降低38km·h
-1
, 货车速度降低32km·h
-1
; 施工作业区客车运行速度与限速值的差值从60km·h
-1
降低到15km·h
-1
, 货车速差从40km·h
-1
降低到5km·h
-1
, 基本达到限速值, 整个交通流运行速度与限速值差值变化趋势一致。可见, 分阶限速优化后的交通标志效能提高明显。
更多>
2015, 15(4): 93-100.
doi:
10.19818/j.cnki.1671-1637.2015.04.012
摘要
(
1600
)
HTML
(
421
)
PDF (499KB)
(
869
)
引用
(
)
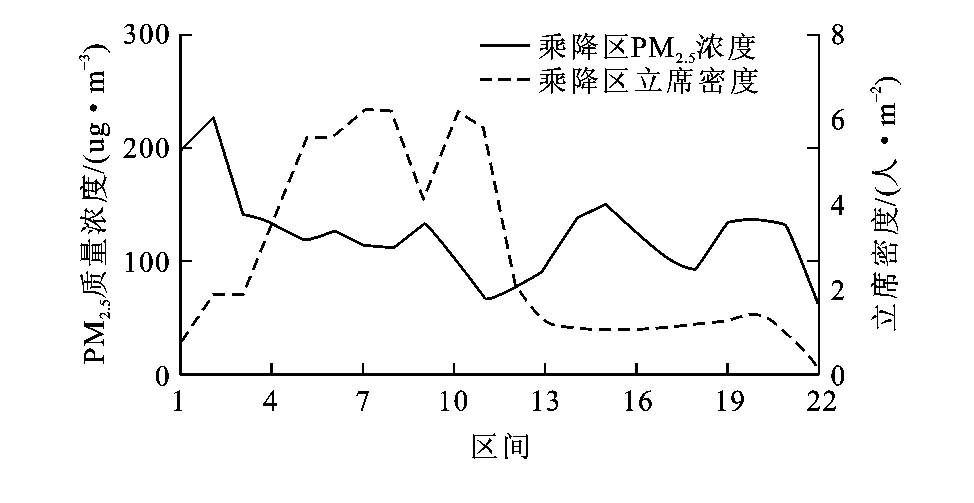
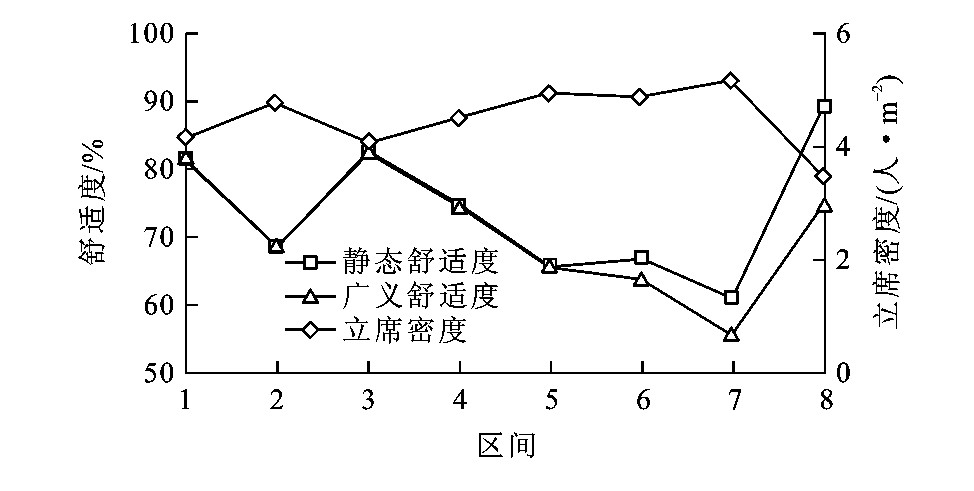
城市轨道交通车厢立席密度计算模型
吴奇兵
,
陈峰
,
高永鑫
,
李小红
,
翟庆生
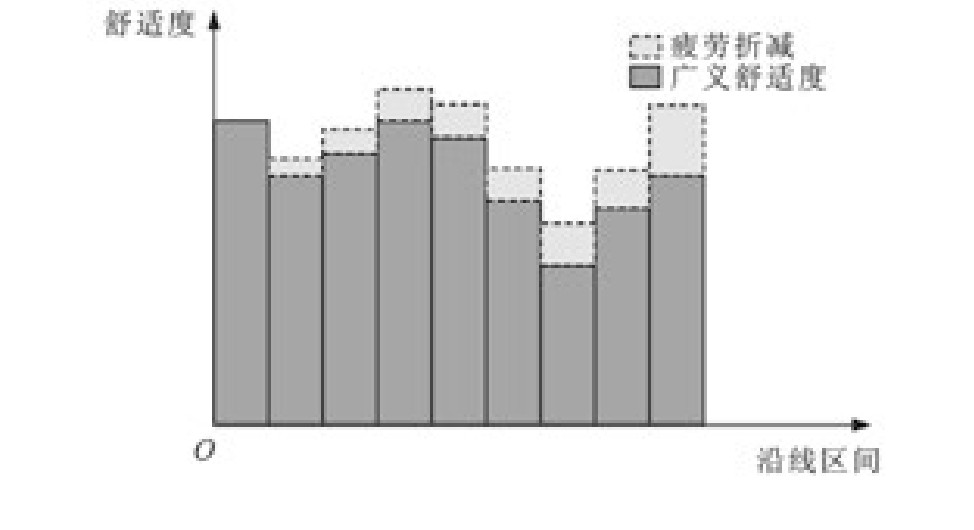
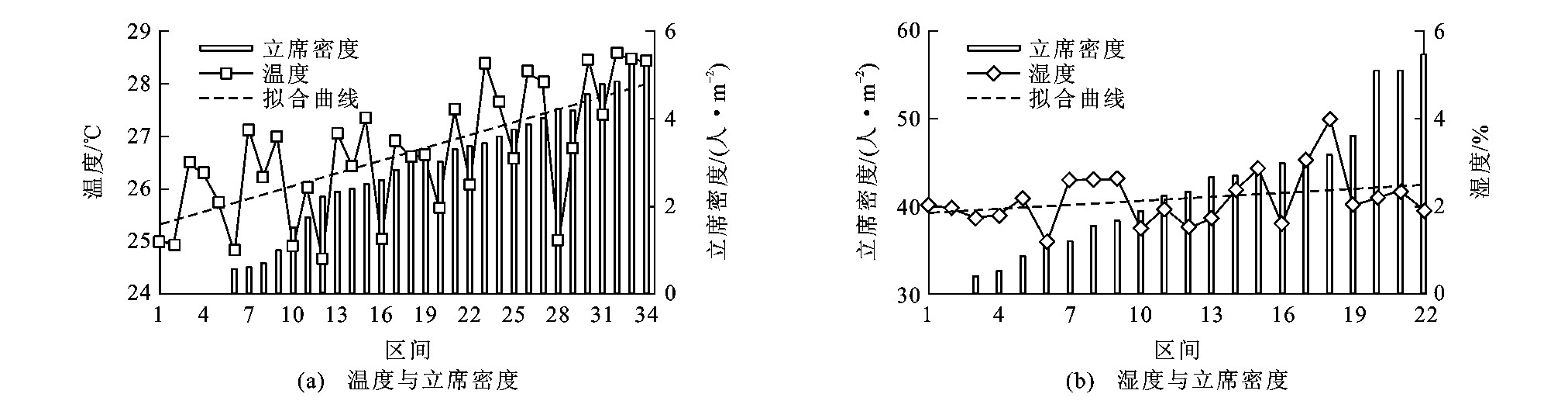
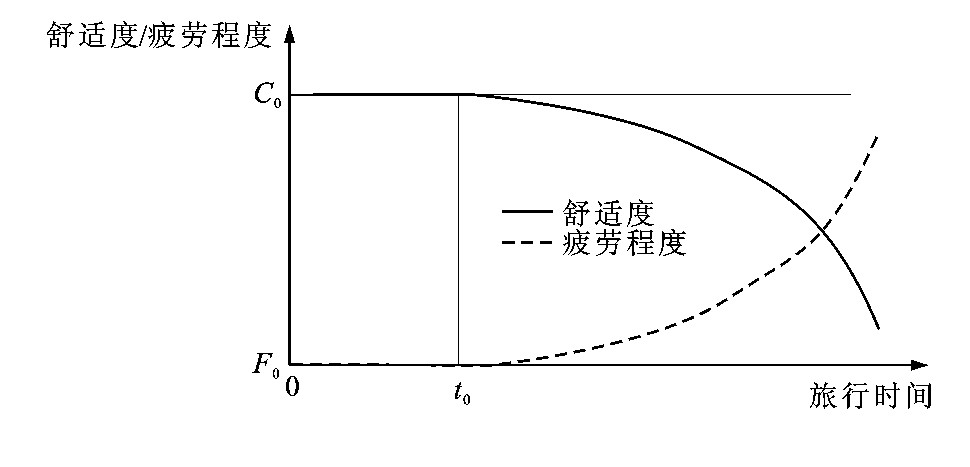
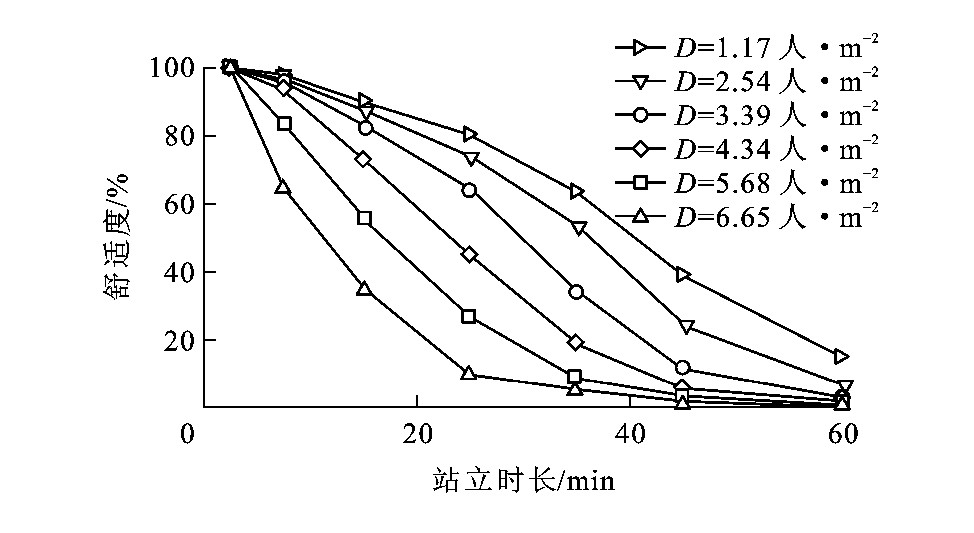
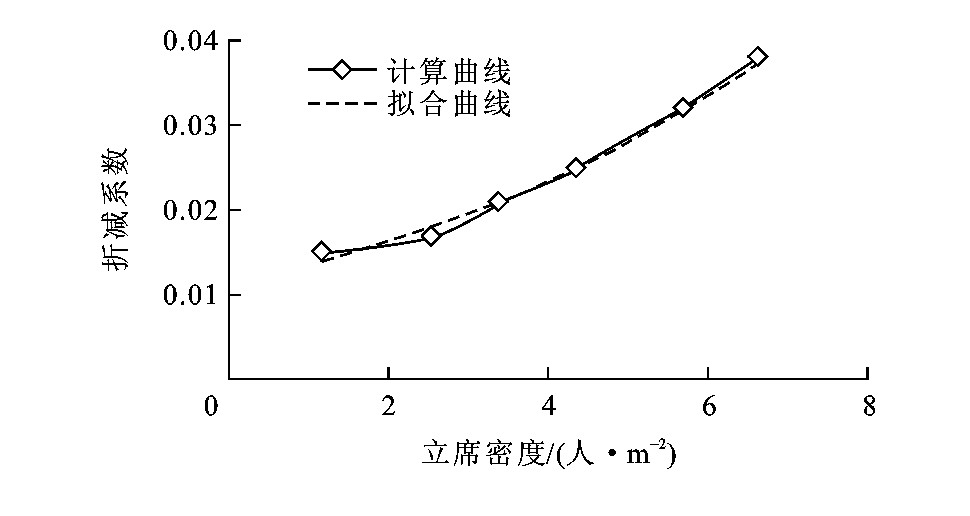
摘要:
为科学合理地确定城市轨道交通车厢立席密度, 从立席乘客舒适度的角度探讨了合理立席密度对舒适度的影响。通过问卷调查和实地测量进行分析和量化, 确定了空间舒适度和车厢微环境2个主要因素, 基于线性加权法和顾客赋权法将2个因素结合构建了静态舒适度评价模型。考虑到站立时长对舒适度的影响, 类比疲劳程度指标对静态舒适度评价模型进行修正, 通过问卷调查验证时间折减因子并标定参数, 构建了基于立席密度的广义舒适度评价模型, 通过广义舒适度评价模型反推得到合理立席密度求解模型, 并对北京地铁4号线-大兴线进行舒适度评价。分析结果表明: 舒适度可以及时、准确地反映立席密度的变化和影响, 借助舒适度评价结果可以改善运营线路的服务水平; 北京地铁4号线-大兴线满足舒适等级、设计等级和超员等级的合理立席密度分别为3.1、4.2、4.7人·m
-2
, 美国车辆设计定员的相应立席密度分别为3.0、4.0、6.0人·m
-2
, 两者基本相当, 且计算结果与调研结果相符, 因此, 模型可作为规划设计中确定合理立席密度的依据。
更多>
2015, 15(4): 101-109.
doi:
10.19818/j.cnki.1671-1637.2015.04.013
摘要
(
1888
)
HTML
(
366
)
PDF (449KB)
(
1331
)
引用
(
)
交通信息工程及控制
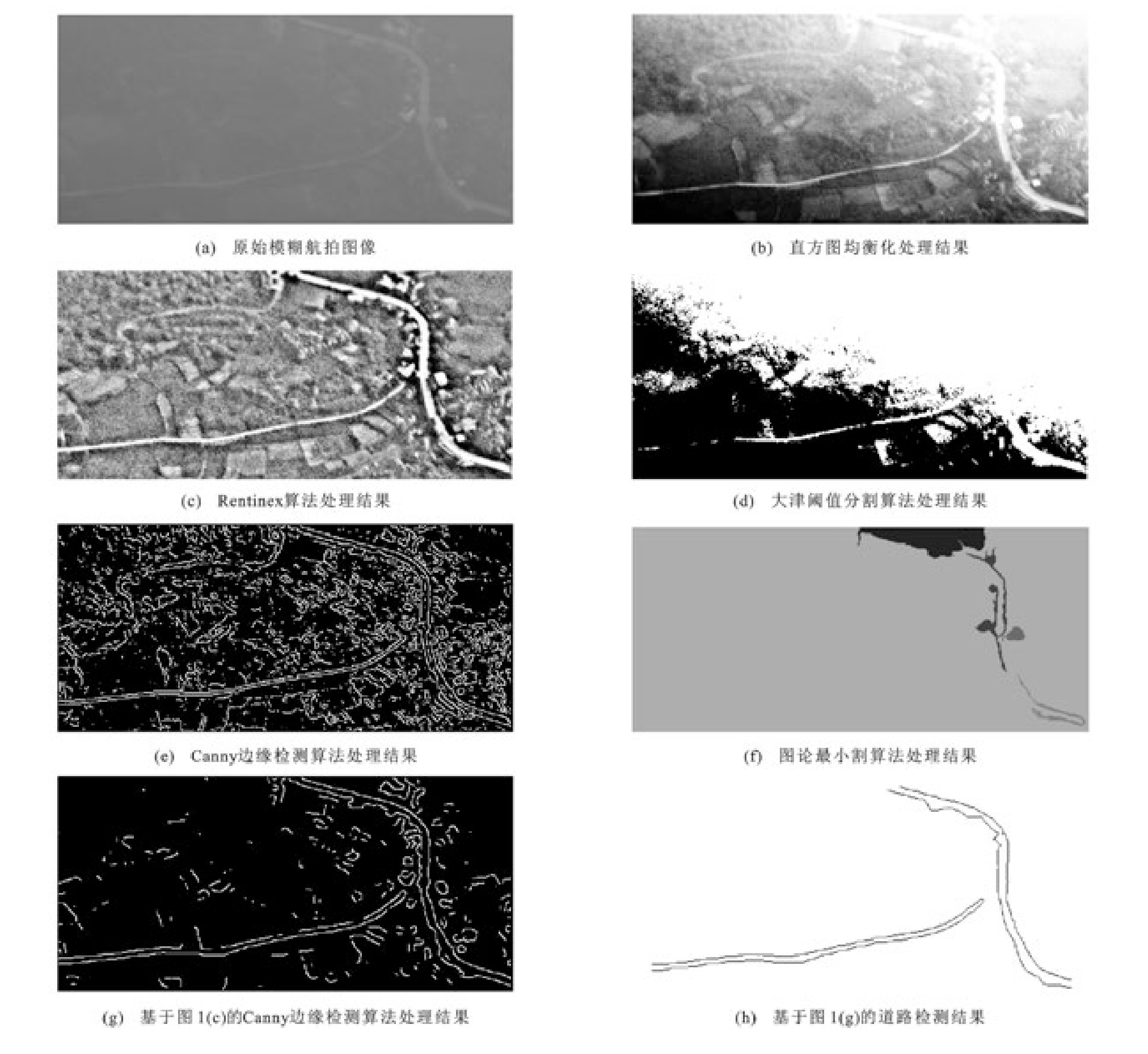
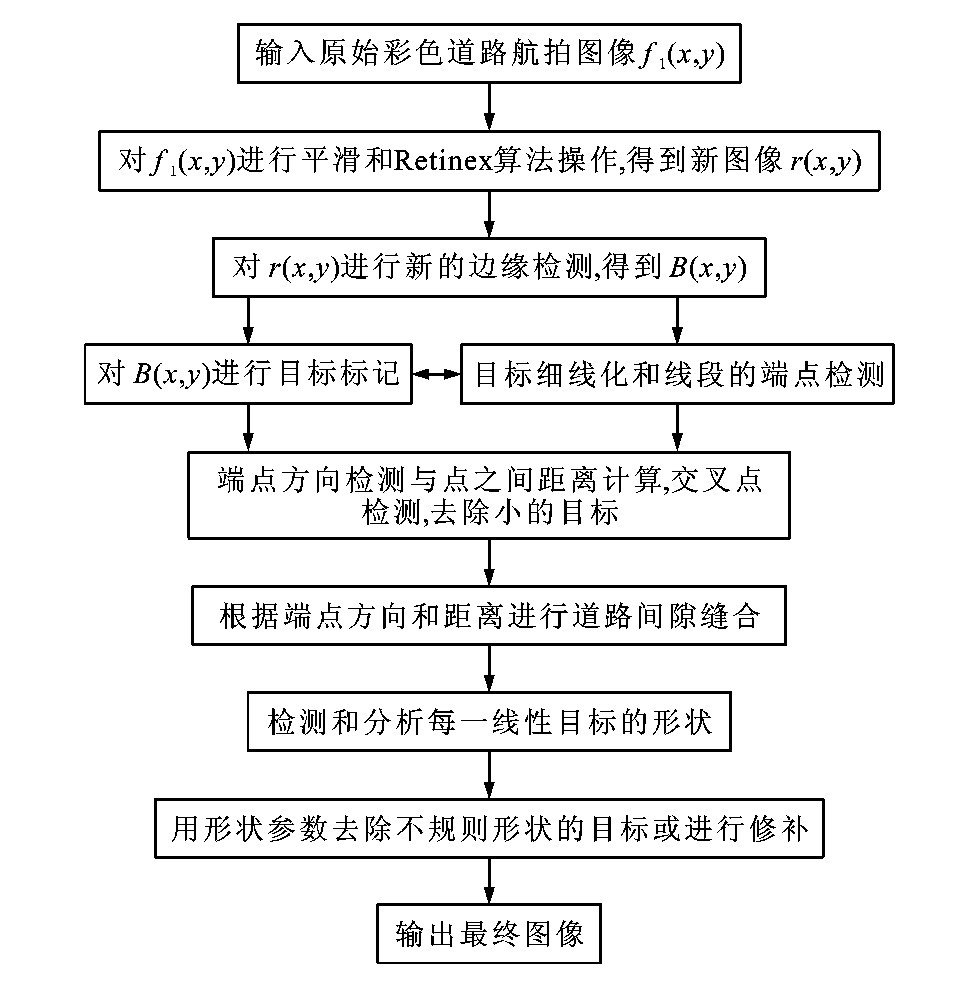
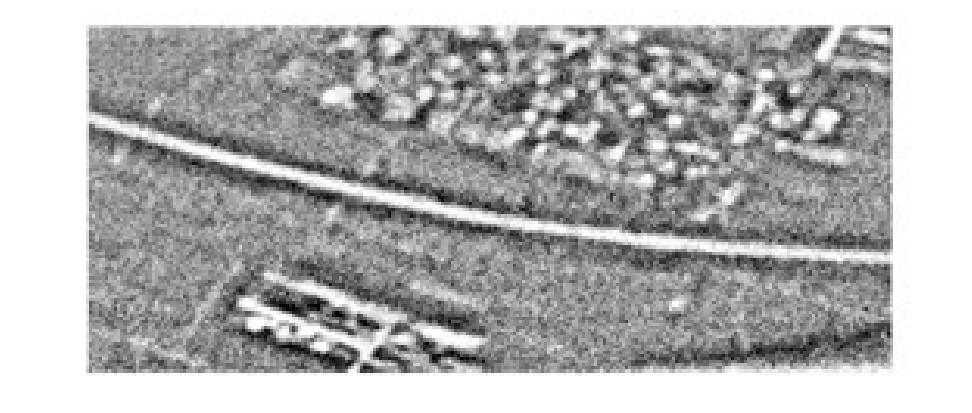
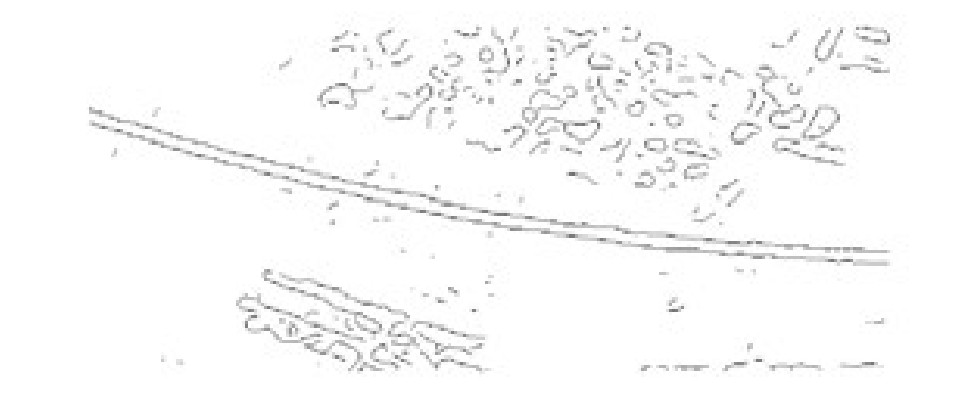
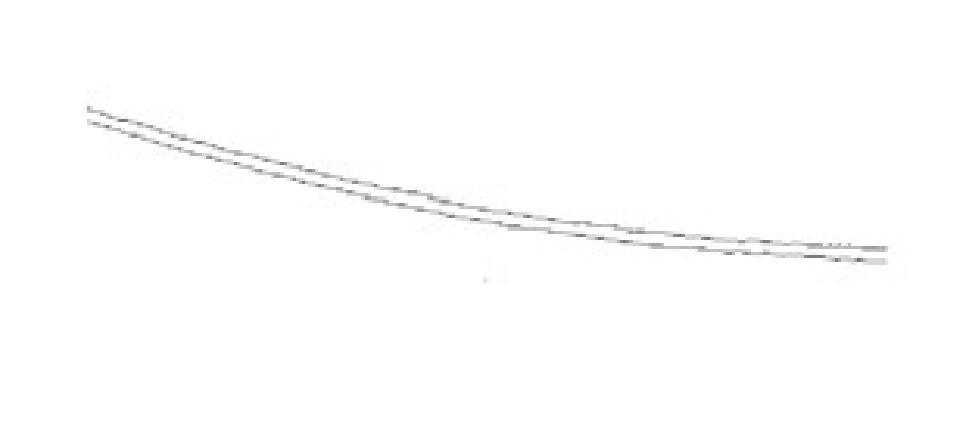
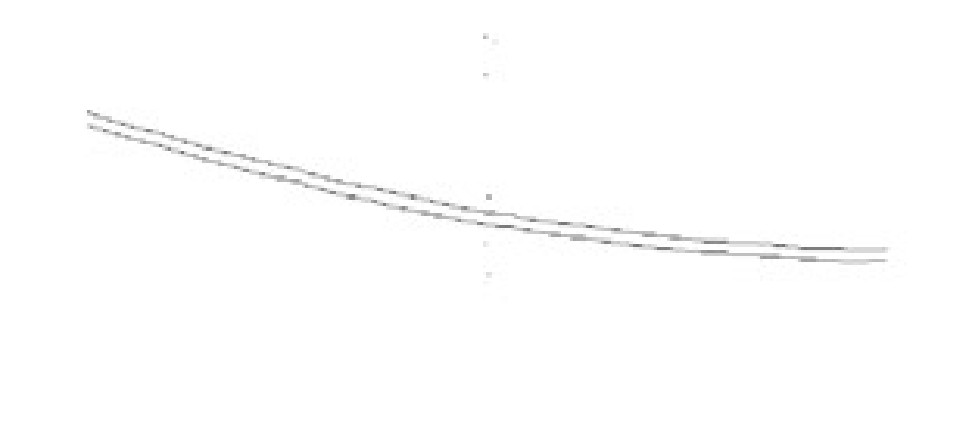
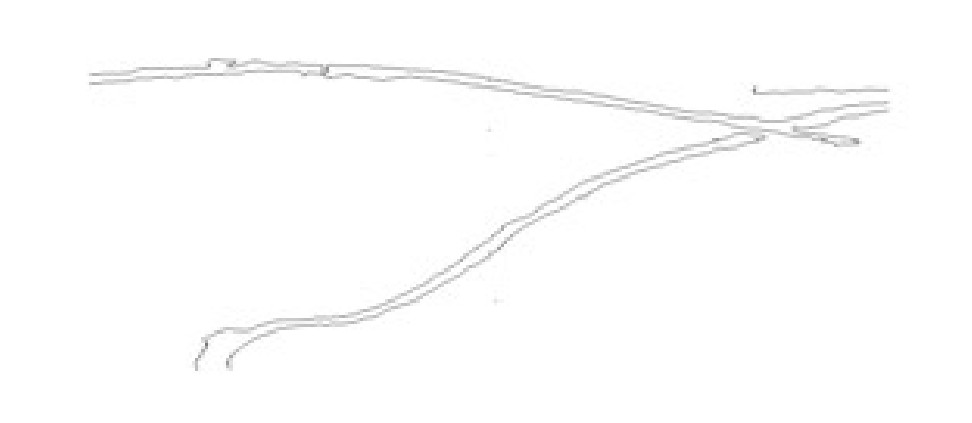
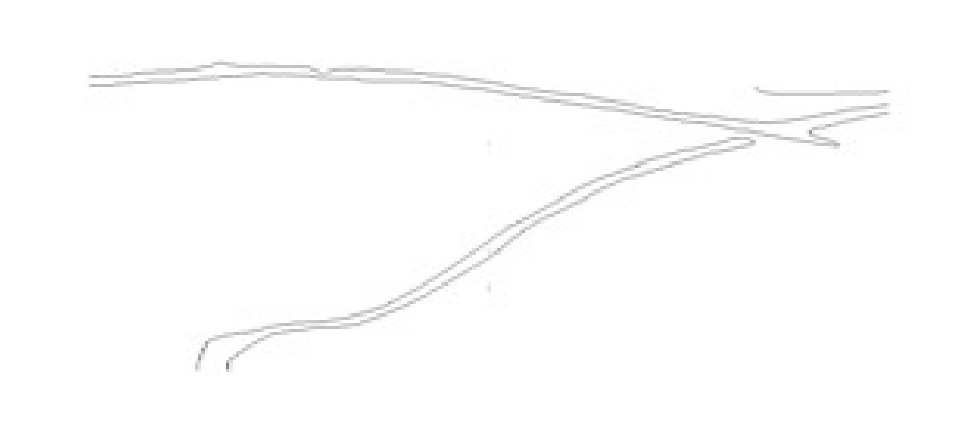
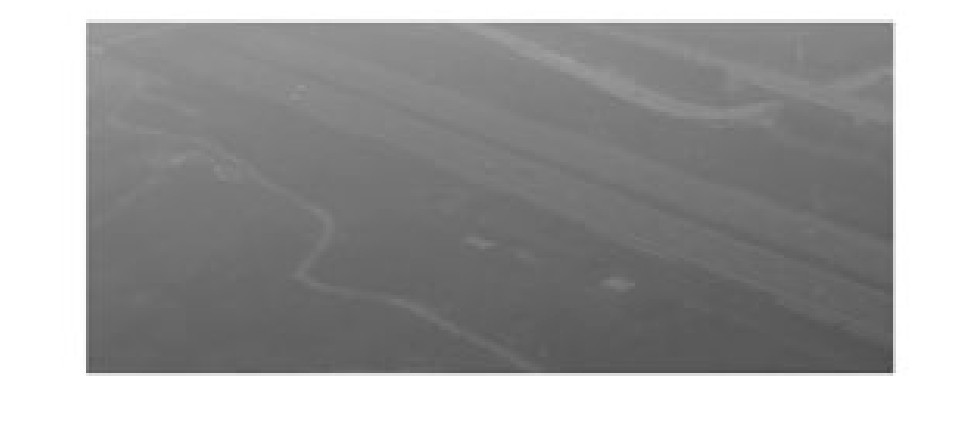
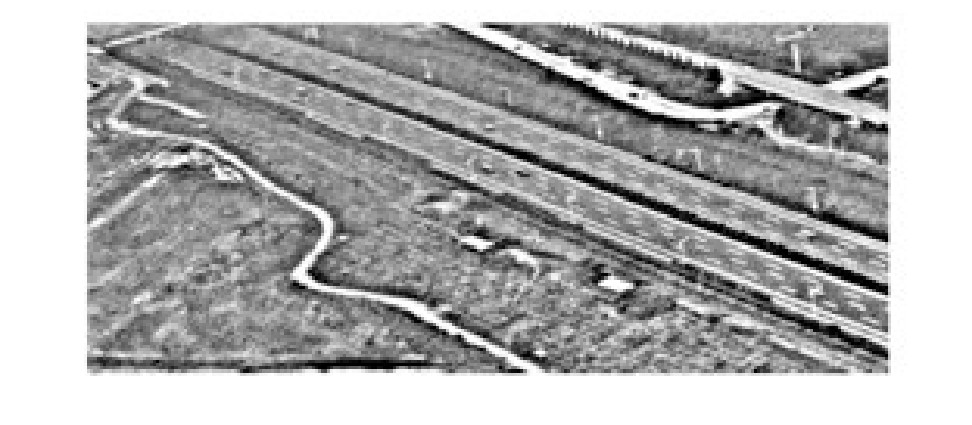
模糊航空图像中的道路自动检测方法
刘晟
,
王卫星
,
王珊珊
,
韩亚
,
黄凌潇
,
张鑫
摘要:
为了在模糊航空图像中精确地检测道路, 通过分析图像中道路特性, 提出了一种道路自动检测方法。通过多尺度Retinex算法增强模糊图像, 用改进的Canny边缘检测算法检测图像中的主要路段, 使用交叉熵理论和贝叶斯决策理论自动获取梯度图像中的高低阈值, 从而将灰度图像转化为二值图像, 并将图像中所有线性目标进行骨架提取。根据线性目标的形状与尺寸参数进行噪声滤除, 并根据端点的方向与端点间的距离进行道路间隙缝合, 并结合边缘和原始图像信息调节和修正已检测出的道路。将道路自动检测方法与几种常用的图像分割算法进行比较, 包括大津阈值分割算法, Canny边缘检测算法与图论最小割算法, 并使用道路自动检测方法对模糊图像中的单条道路、交叉道路和多条道路进行检测。检测结果表明: 对模糊或光照不均的航空道路图像, Retinex算法增强图像后可以清晰显示主干道路, 而常规的图像分割算法无法将主干道提取出来, 使用改进的Canny边缘检测算法并附以图像后处理功能较好地提取主干道路。使用道路自动检测方法能够清晰地检测模糊航空图像中单条道路、交叉道路和多条道路, 与人工识别的效果接近。
更多>
2015, 15(4): 110-117.
doi:
10.19818/j.cnki.1671-1637.2015.04.014
摘要
(
1443
)
HTML
(
349
)
PDF (533KB)
(
967
)
引用
(
)
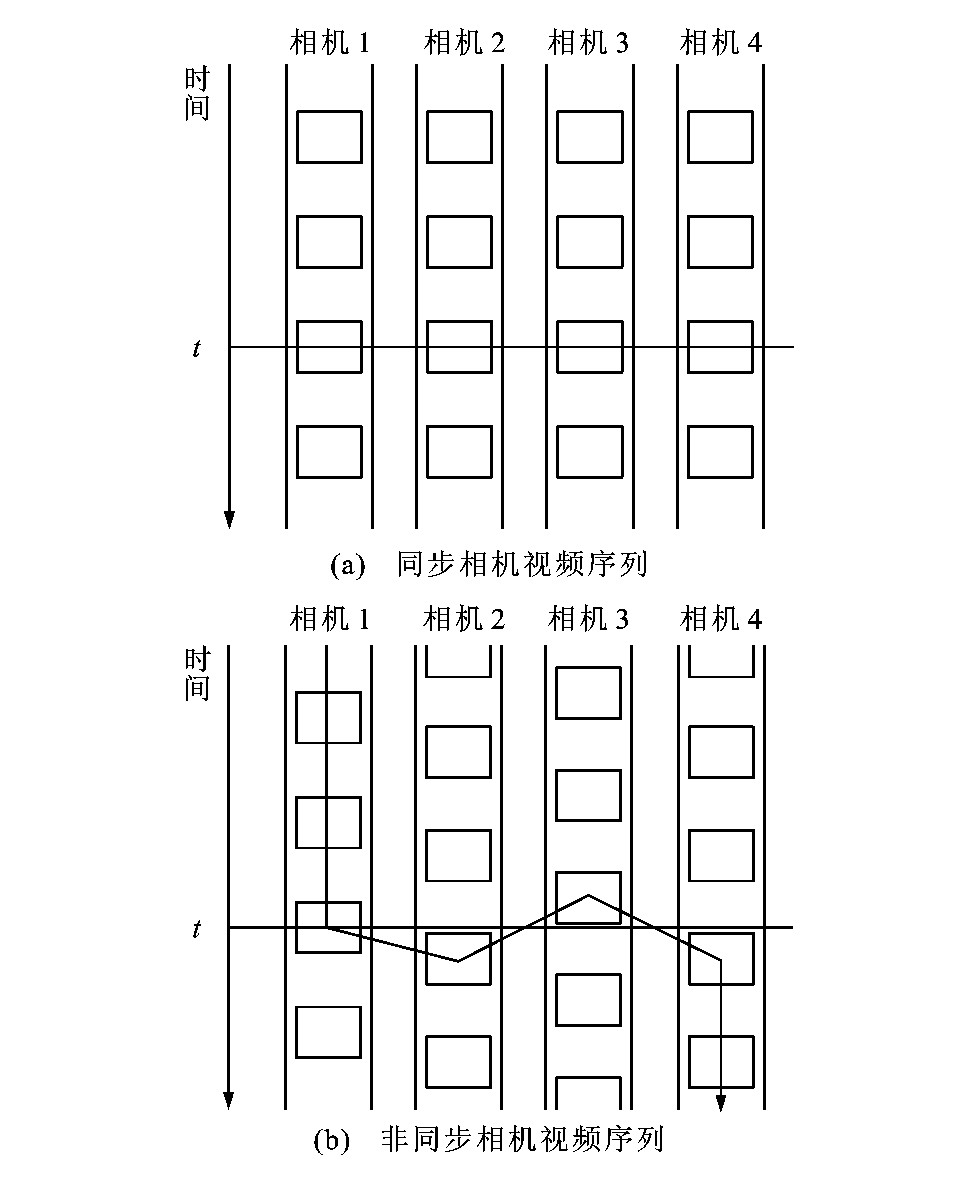
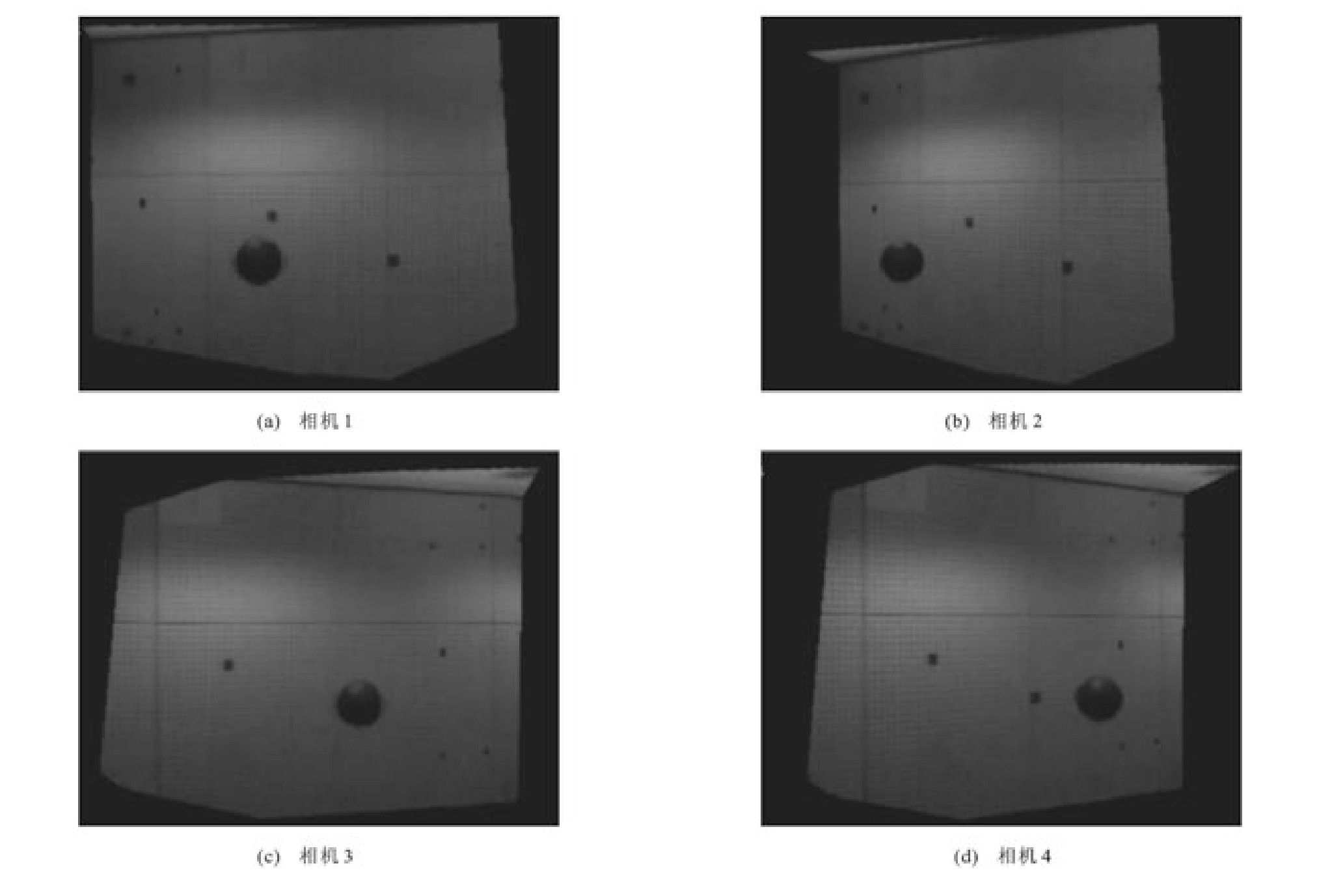
道路监控系统中非同步相机时间校正方法
梁华刚
,
程加乐
,
孙小喃
,
茹锋
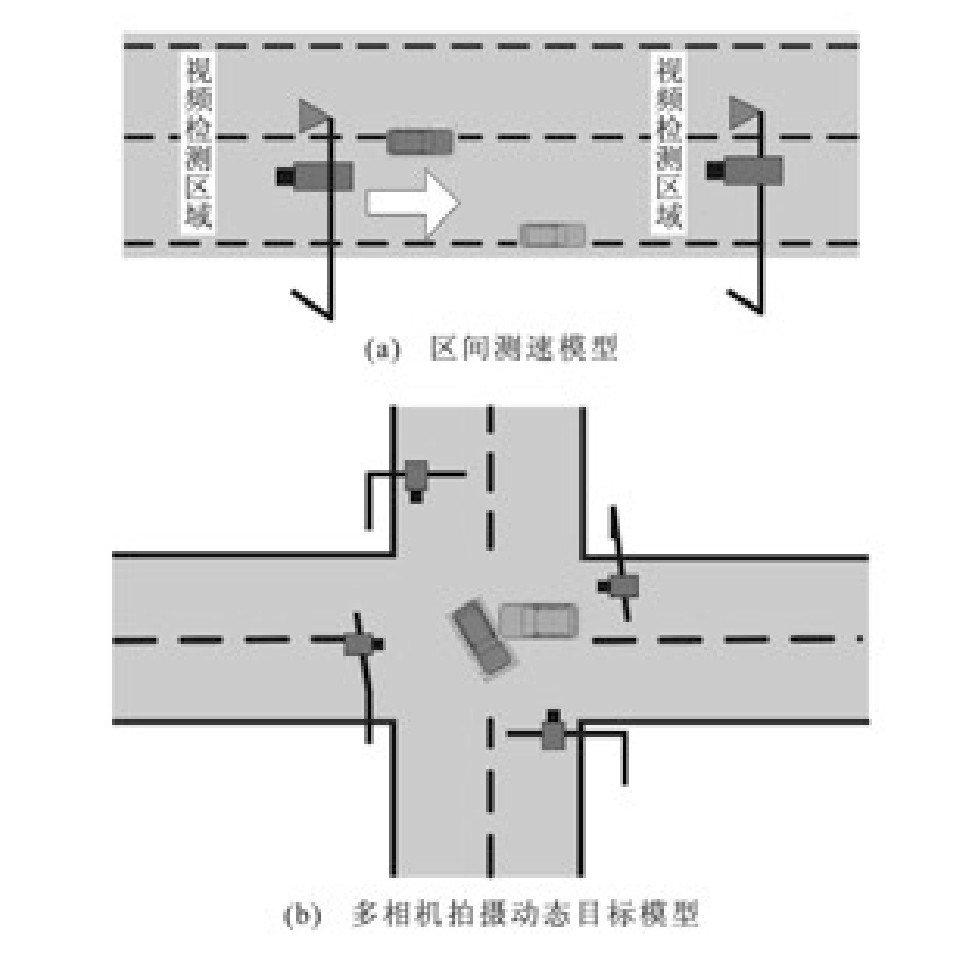
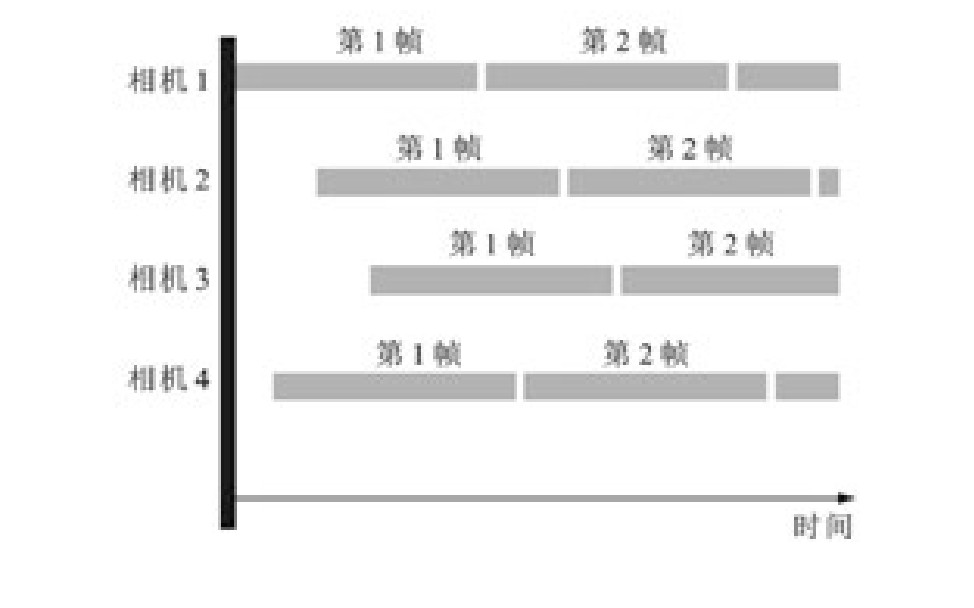
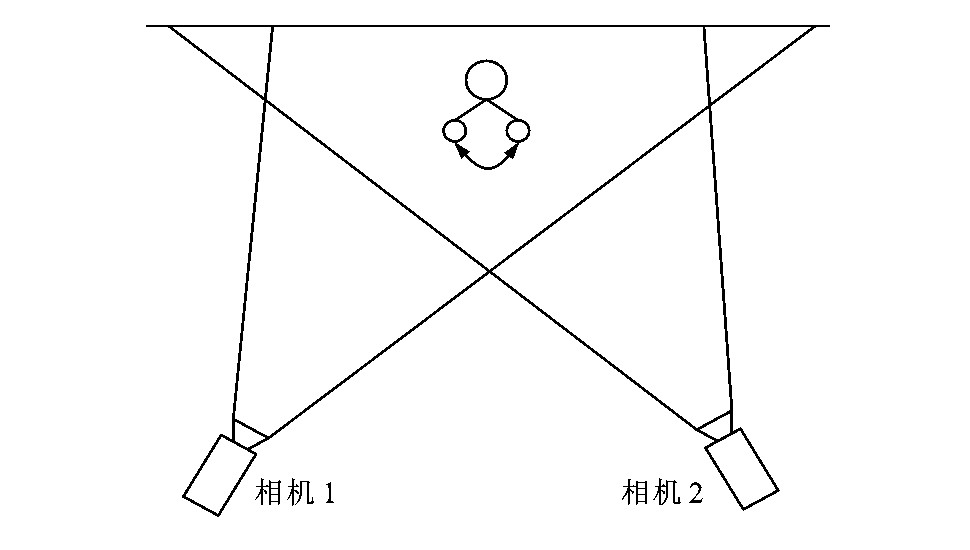
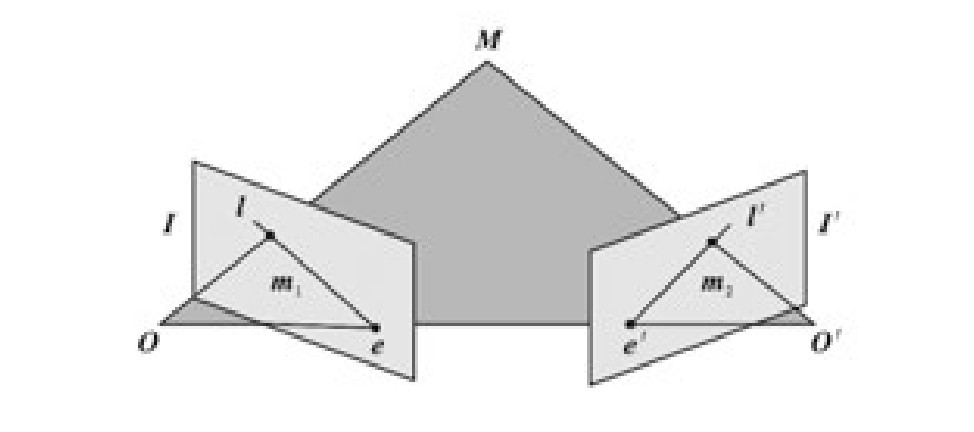
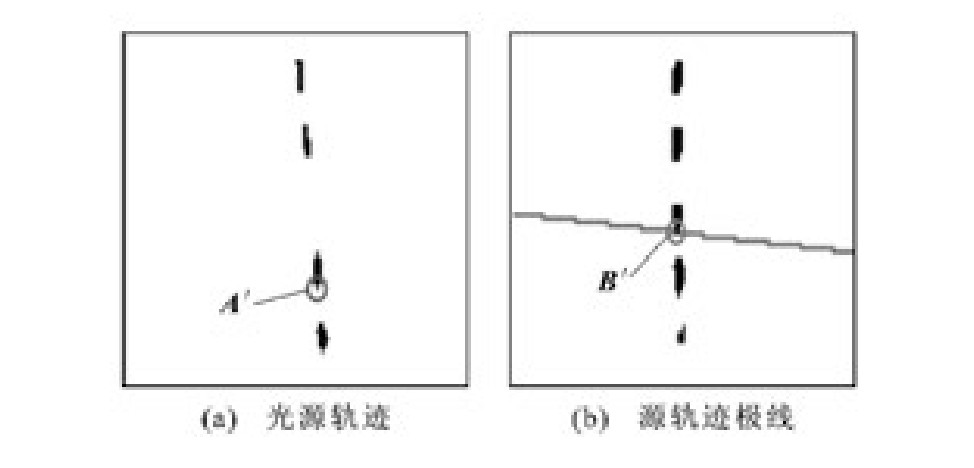
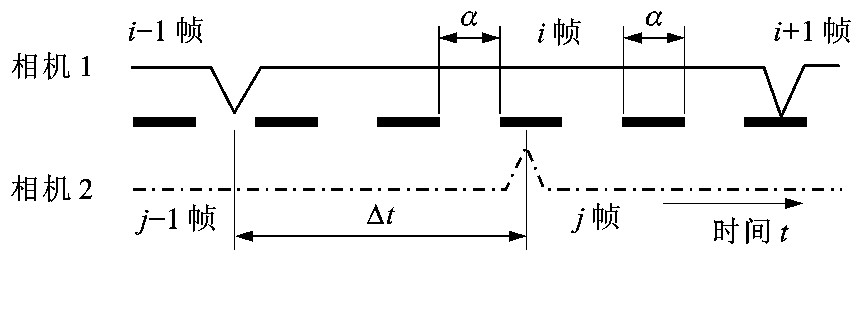
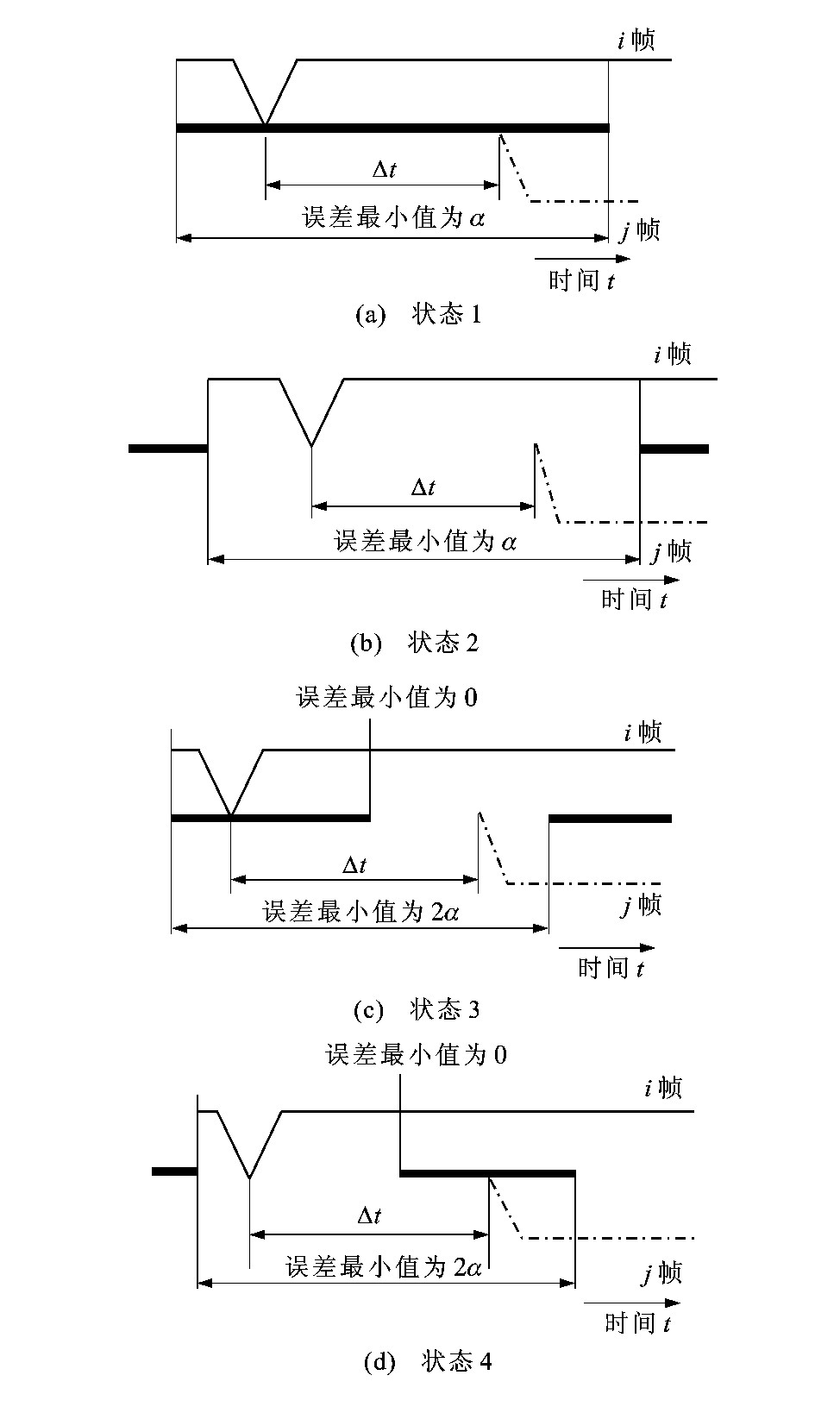
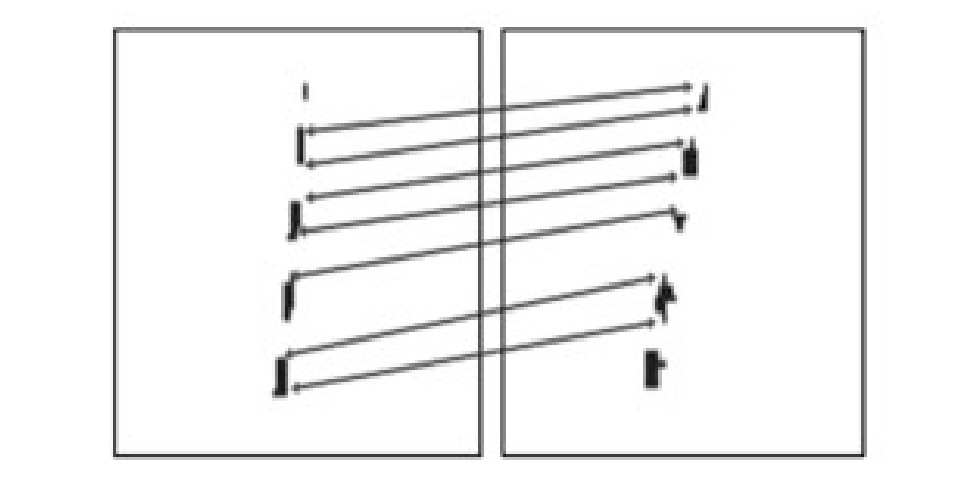
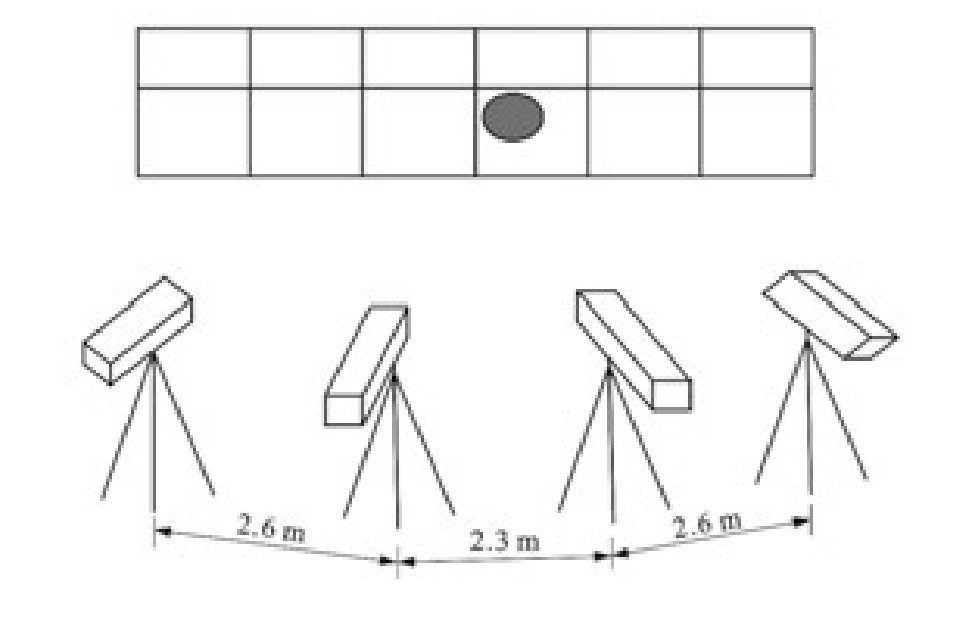
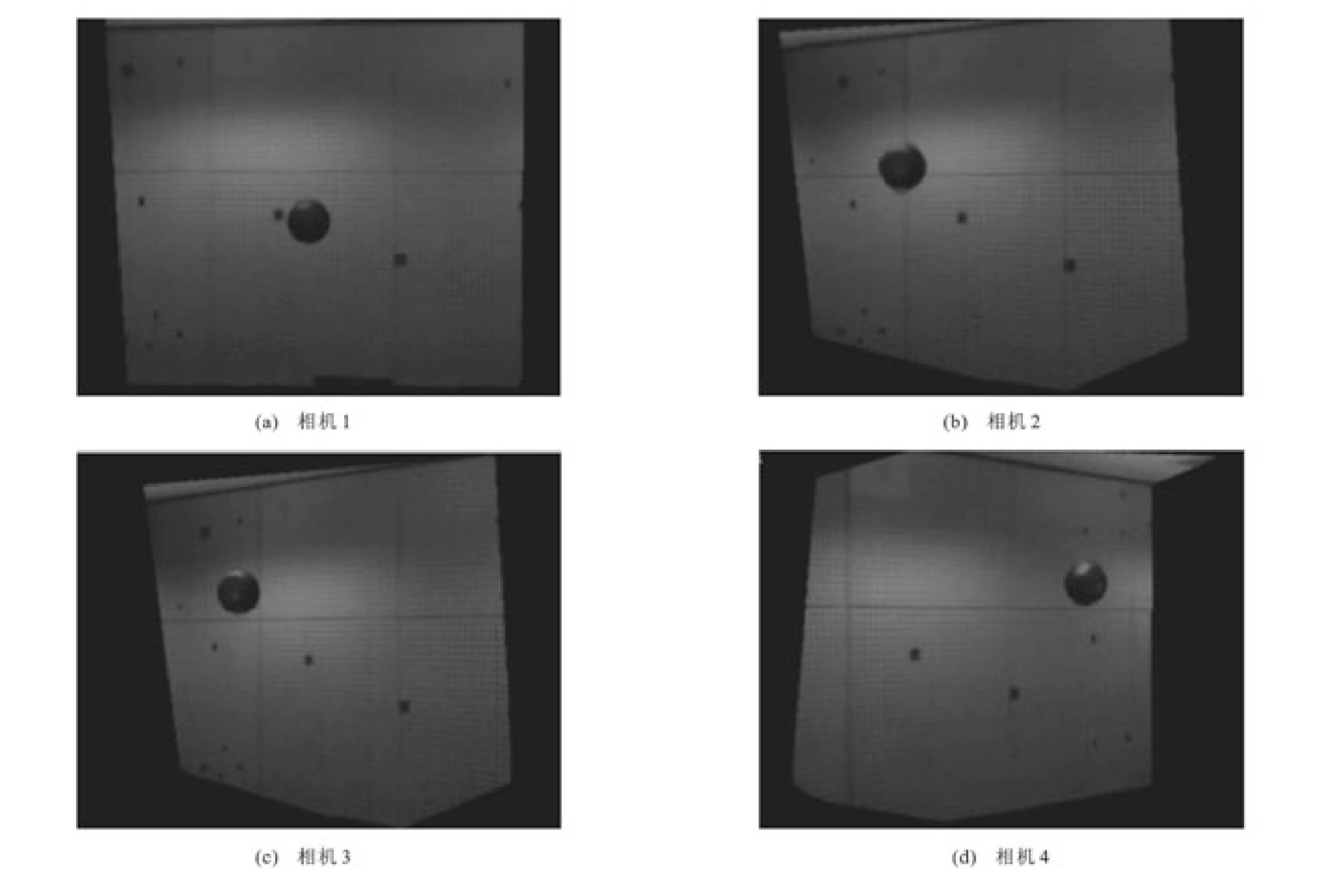
摘要:
为了提高交通事件还原的准确性, 提出一种基于双目极几何关系的高精度交通现场三维重建时间校正方法。分析了多个非同步相机帧序列, 建立了非同步相机时间校正模型。为了校正多部非同步相机的时间误差, 采用极几何约束和点到极线距离最小约束准则, 进行对应帧时间同步匹配。由2部非同步相机组成拍摄系统, 进行对应帧时间匹配误差分析, 估算视频序列起始帧时间误差, 实现高精度动态场景复原。通过闪烁LED灯的移动模拟高速移动的车辆, 估计时间误差范围。为了进一步验证方法在实际道路环境中的有效性, 利用4部相机拍摄自由落体的皮球视频序列, 分别使用相似度判别的时间校正方法和本文方法进行对比试验。试验结果表明: 当相机的曝光时间为1/30s, 高速移动的发光源闪烁周期为6.59ms时, 视频序列的起始帧时间误差范围为0~6.59ms, 在这个误差范围内的对应帧数达到88.1%以上; 与相似度判别的时间校正方法相比, 本文方法效果较好; 与几种传统时间校正方法相比, 本文方法显著提高了道路监控系统中非同步相机对应帧时间误差匹配和三维重建的精确度。
更多>
2015, 15(4): 118-126.
doi:
10.19818/j.cnki.1671-1637.2015.04.015
摘要
(
1352
)
HTML
(
476
)
PDF (490KB)
(
838
)
引用
(
)
文章推荐
更多>
低空无人机物流公众接受度研究综述
智能飞行汽车:驱动未来城市空中交通
无人驾驶航空器自主探测与避让技术研究综述
铁道车辆齿轮箱动力学与故障诊断研究综述
FMEA/FMECA在船舶工程中的应用综述
关键词检索
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
期刊检索
2026年
2025年
2024年
2023年
2022年
2021年
2020年
2019年
2018年
2017年
2016年
2015年
2014年
2013年
2012年
2011年
2010年
2009年
2008年
2007年
2006年
2005年
2004年
2003年
2002年
2001年
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
期刊动态
更多>
《交通运输工程学报》“航空运输业与航空制造业融合下的前沿技术、装备与系统”专刊征稿
《交通运输工程学报》“水路交通智能技术与装备”专刊征稿
学报动态
《交通运输工程学报》“多年冻土区交通基础设施韧性提升技术” 专刊征稿启事
《交通运输工程学报》“AI驱动下的磁浮交通系统先进技术”专刊征稿启事
《交通运输工程学报》“月表载运系统构建及新型载运装备设计”专刊征稿启事
作者园地
更多>
关于文章中的中国地图
中图分类号
友情链接
更多>
《工程索引》(Ei Compendex)
《斯高帕斯数据库》(Scopus)
交通运输工程学报(CNKI)
长安大学学术期刊管理中心
交通运输工程学报(英文)
中国公路学报
×
Close
导出文件
文件类别
RIS(可直接使用Endnote编辑器进行编辑)
Bib(可直接使用Latex编辑器进行编辑)
Txt
引用内容
引文——仅导出文章的Citation信息
引文和摘要——导出文章的Citation信息和文章摘要信息
×
Close
引用参考文献格式