首页
期刊简介
编委会
期刊在线
网络首发
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
出版伦理
AI使用声明
同行评审及出版流程
投稿模板
版权转让协议
期刊订阅
联系我们
编辑团队
联系方式
English
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
首页
期刊简介
编委会
期刊在线
网络首发
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
出版伦理
AI使用声明
同行评审及出版流程
投稿模板
版权转让协议
期刊订阅
联系我们
编辑团队
联系方式
English
留言板
尊敬的读者、作者、审稿人, 关于本刊的投稿、审稿、编辑和出版的任何问题, 您可以本页添加留言。我们将尽快给您答复。谢谢您的支持!
姓名
邮箱
手机号码
标题
留言内容
验证码
用户中心
作者投稿
作者查询
专家审稿
编辑办公
期刊信息
(2001年创刊 月刊 )
主 管:
中华人民共和国教育部
主 办:
长安大学
编辑出版:
《交通运输工程学报》编辑部
主 编:
沙爱民
地 址:
陕西省 西安市 南二环 路中段 长安大学《交通运输工程学报》编辑部
邮 编:
710064
电 话:
029-82334388
邮 箱:
jygc@chd.edu.cn
国内发行:
中国邮政集团有限公司陕西省报刊发行局
国外发行:
中国国际图书贸易集团有限公司
标准刊号:
ISSN
1671-1637
CN
61-1369/U
CODEN
JYGXAS
学报微信视频号
学报微信公众号
重要源期刊收录
更多>
《交通运输工程学报》收录信息
《铁路运输领域高质量科技期刊分级目录》T1级
《公路运输领域高质量科技期刊分级目录》T1级
美国《工程索引》(Ei Compendex)
《文摘和引文数据库》(Scopus)
日本科学技术振兴机构(JST)中国文献数据库
邮件订阅
RSS
2020年 第20卷 第2期
栏目
道路与铁道工程
载运工具运用工程
交通运输规划与管理
交通信息工程及控制
上一期
|
下一期
选择全部
显示方式:
道路与铁道工程
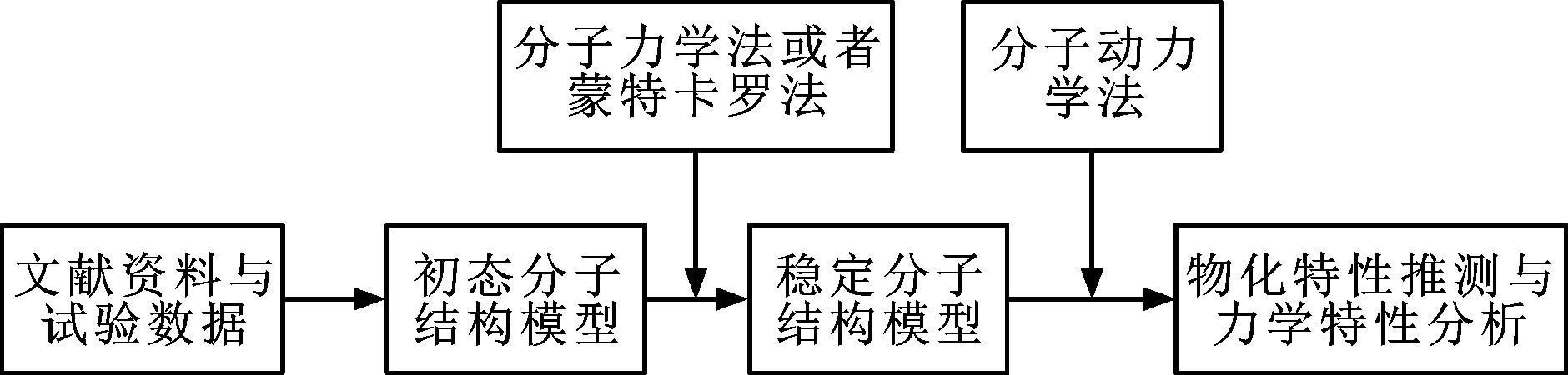
沥青混合料分子模拟技术综述
汪海年
,
丁鹤洋
,
冯珀楠
,
邵林龙
,
屈鑫
,
尤占平
摘要:
分析了沥青混合料分子模拟技术的基本原理、主要实现手段和模拟流程, 研究了沥青分子模型构建的2类主要方法, 总结了不同时期的沥青质结构模型与不同应用场合中的集料模型, 探讨了沥青扩散现象、外加剂对沥青性能的影响机理、沥青与再生剂的融合、沥青-集料的界面作用模拟影响因素以及水、沥青老化等因素对沥青-集料黏附性的影响等问题, 展望了沥青路面材料分子模拟技术的未来研究方向。研究结果表明: 分子模拟技术可以从微观角度探究道路工程材料的性能变化与内在机理, 为材料的精确设计和定量分析奠定基础; 分子组装法是目前沥青分子模型构建的重要思路, 能够有效表征沥青材料的物化和力学特性; 集料模型的构建思路主要是根据集料的化学成分来选择构建相关晶胞, 进而代表集料的宏观特性; 分子模拟技术动态展现了沥青的扩散过程, 体现了内部各组分的扩散速率; 利用分子模拟技术可以分析沥青自愈行为的过程, 并提出不同指标来表征了各个阶段的愈合速率; 借助分子模拟技术, 可以从微观角度解释和分析沥青内部组分和外加剂对沥青性能影响; 在沥青-再生剂融合研究中, 分子模拟技术可表征再生剂扩散深度、掺入时机与再生机理等问题; 在沥青-集料界面作用研究中, 分子模拟技术可表征材料的化学组成、加载模式、模型参数与界面接触等因素的影响; 水、温度与沥青的老化等因素将会对沥青-集料界面作用产生重要影响, 通过构建含水模型可将微观模拟与宏观试验联系起来。
更多>
2020, 20(2): 1-14.
doi:
10.19818/j.cnki.1671-1637.2020.02.001
摘要
(
4358
)
HTML
(
925
)
PDF (2722KB)
(
787
)
引用
(
)
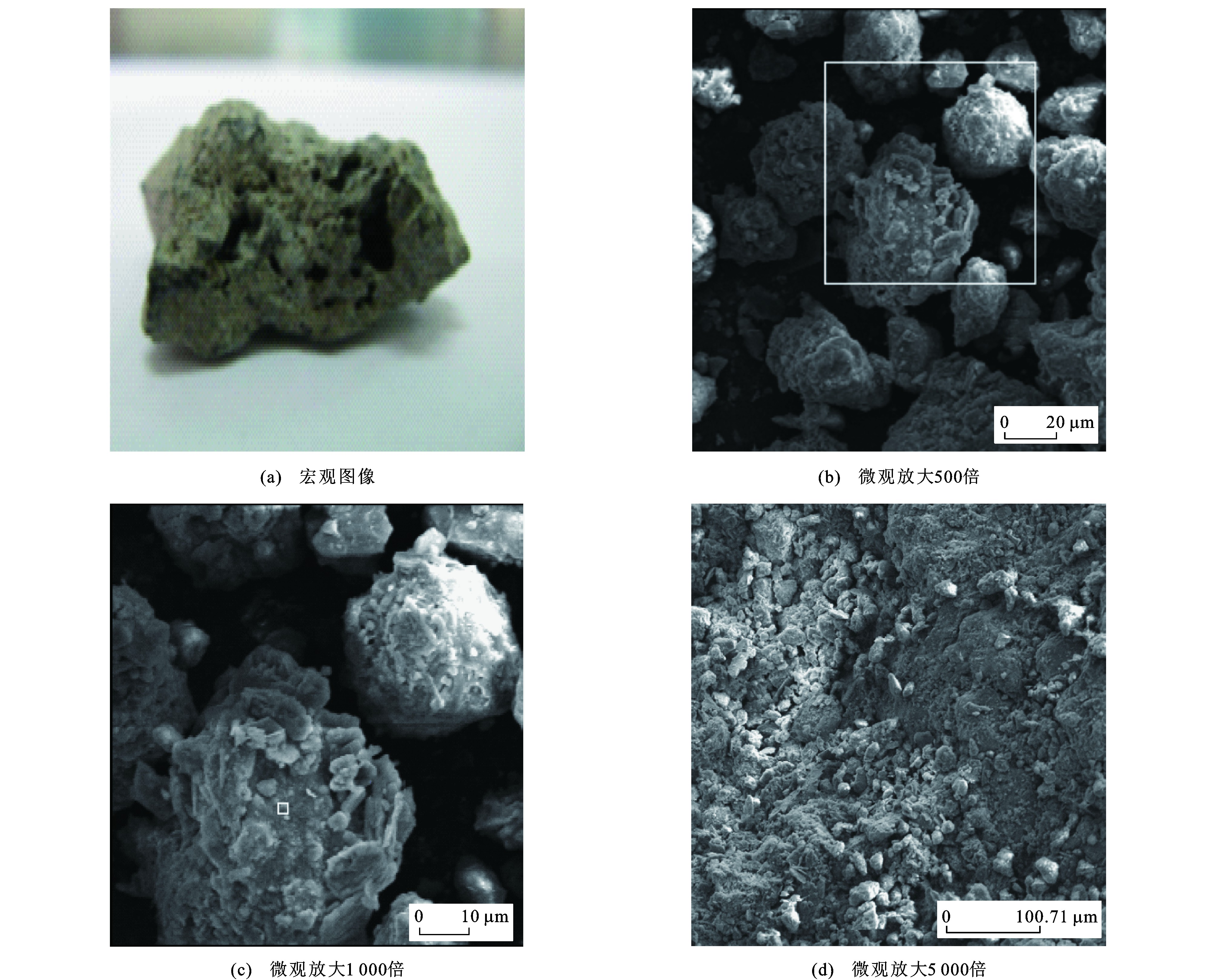
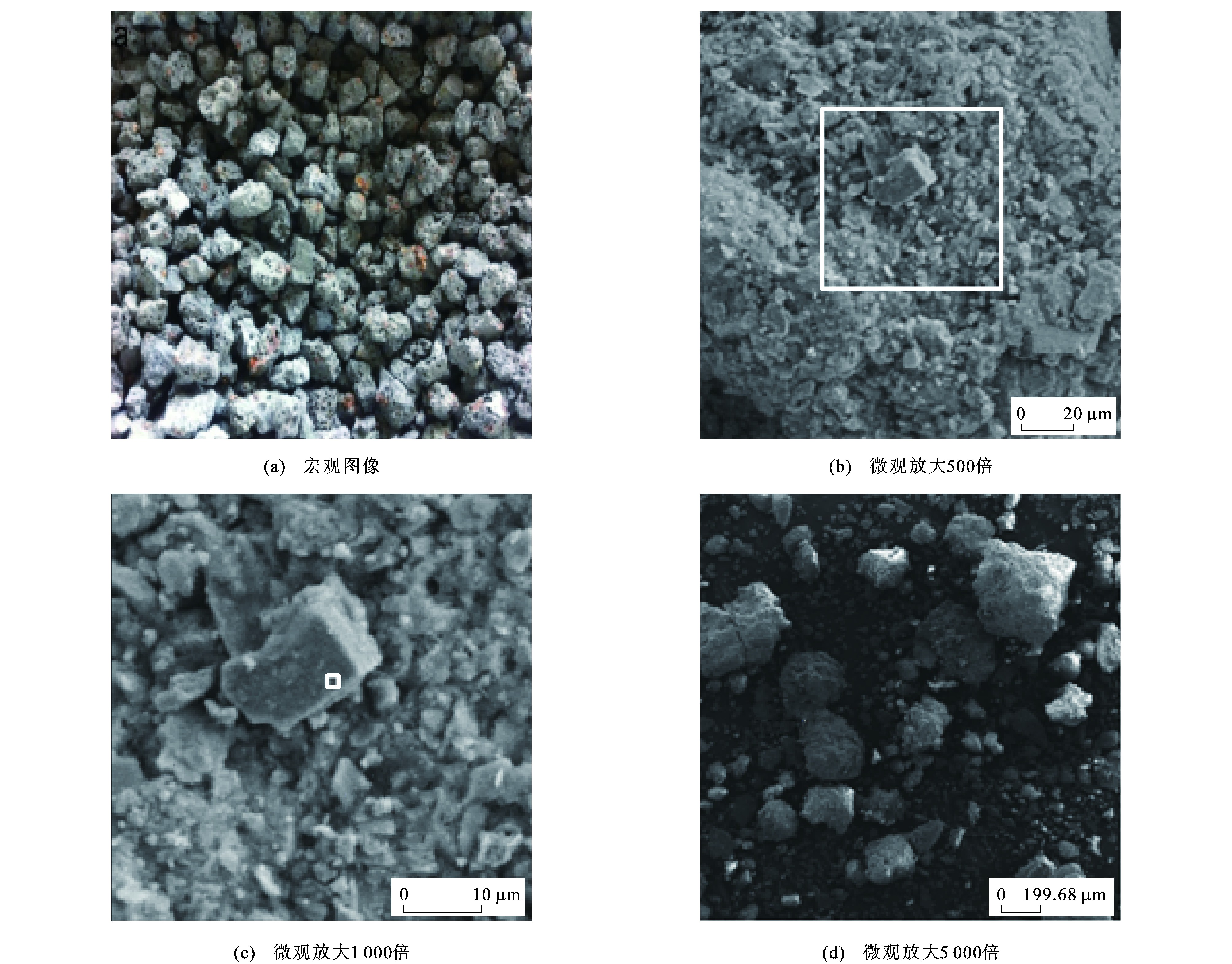
钢渣沥青混合料应用现状
何亮
,
詹程阳
,
吕松涛
,
JamesGRENFELL
,
高杰
,
KarolKOWALSKI
,
JanVALENTIN
,
谢君
,
LidijaRŽEK
,
凌天清
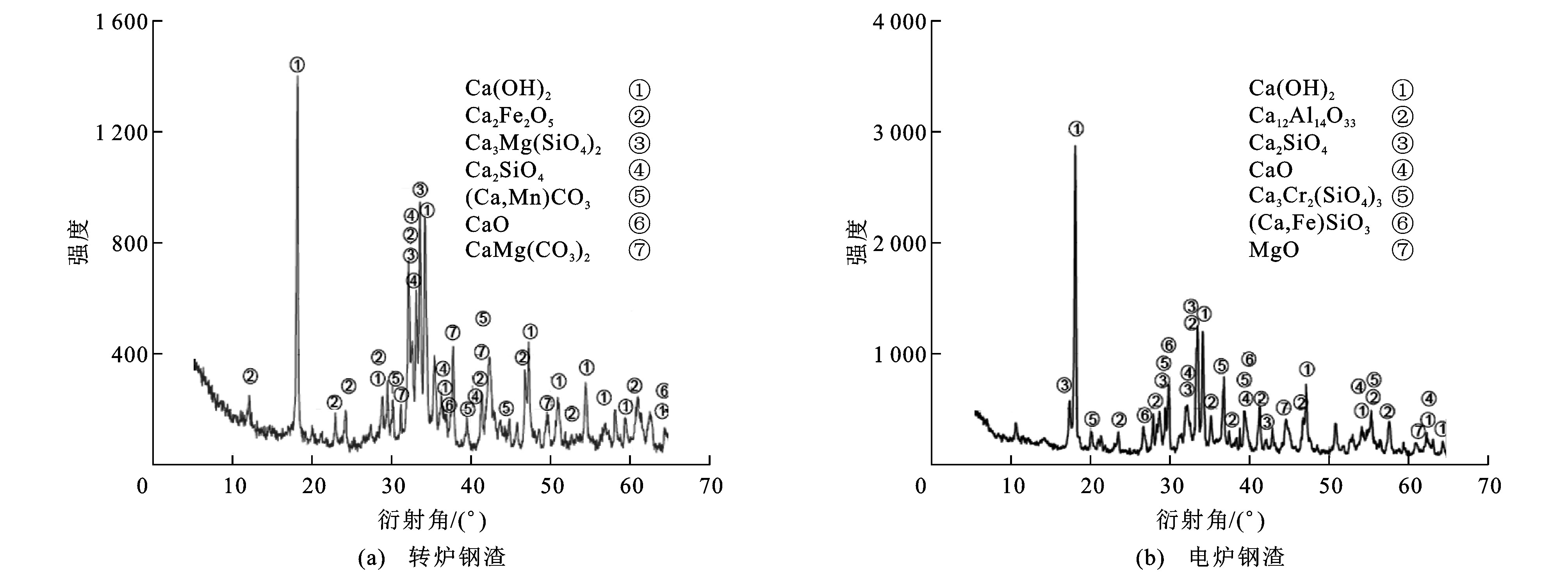
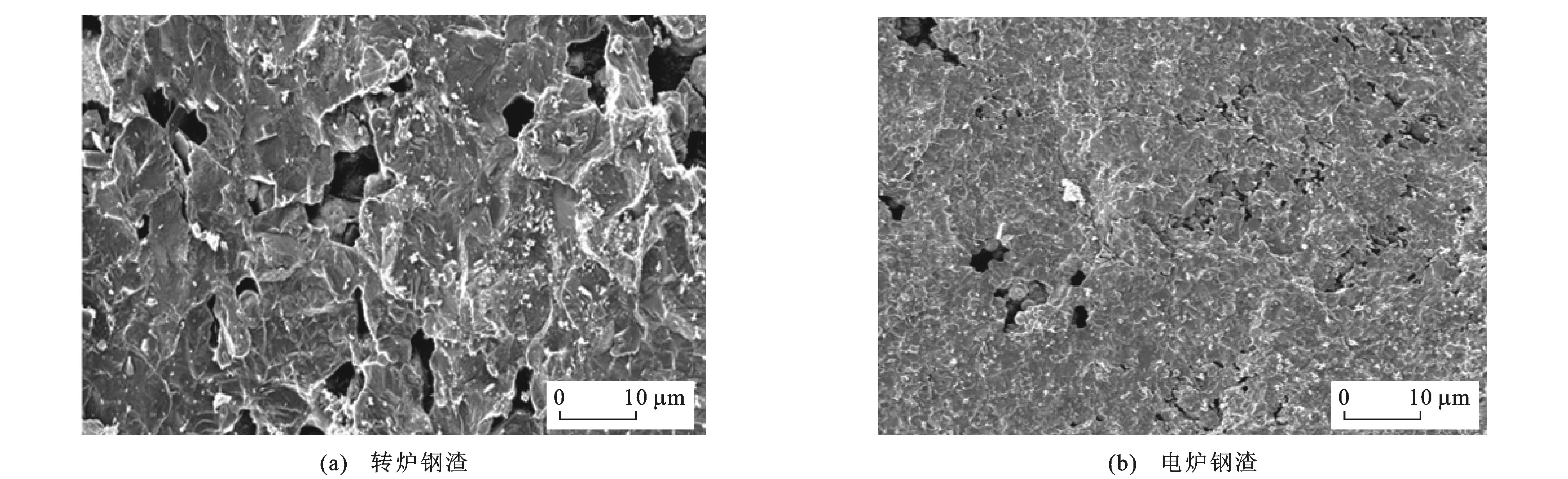
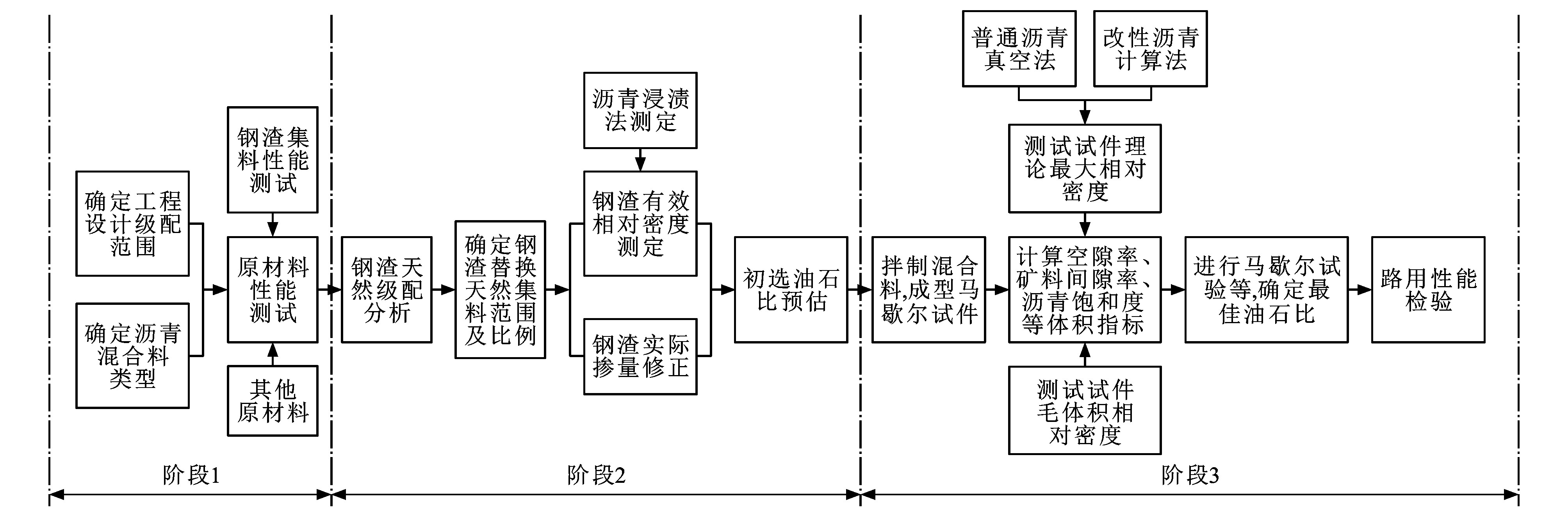
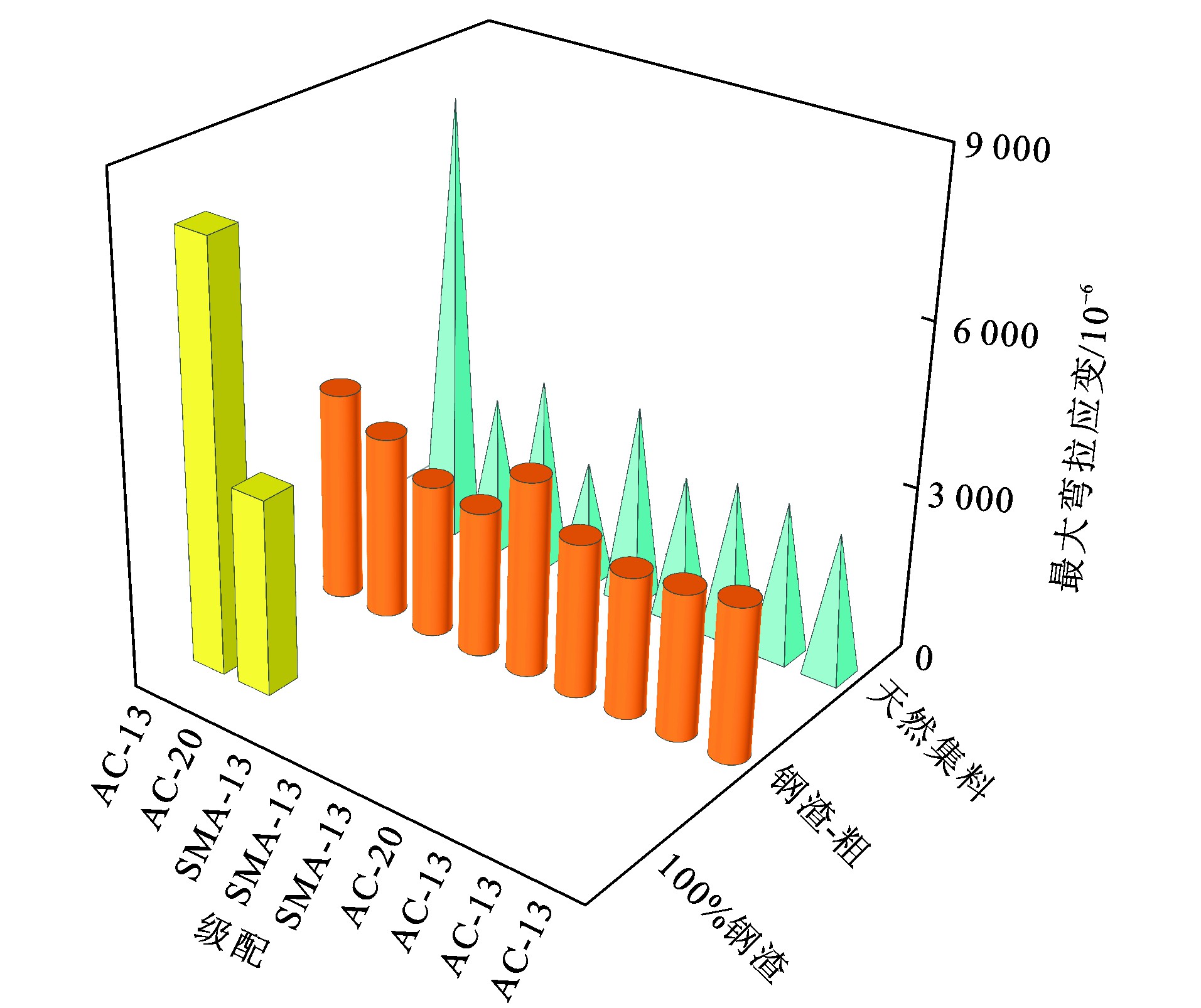
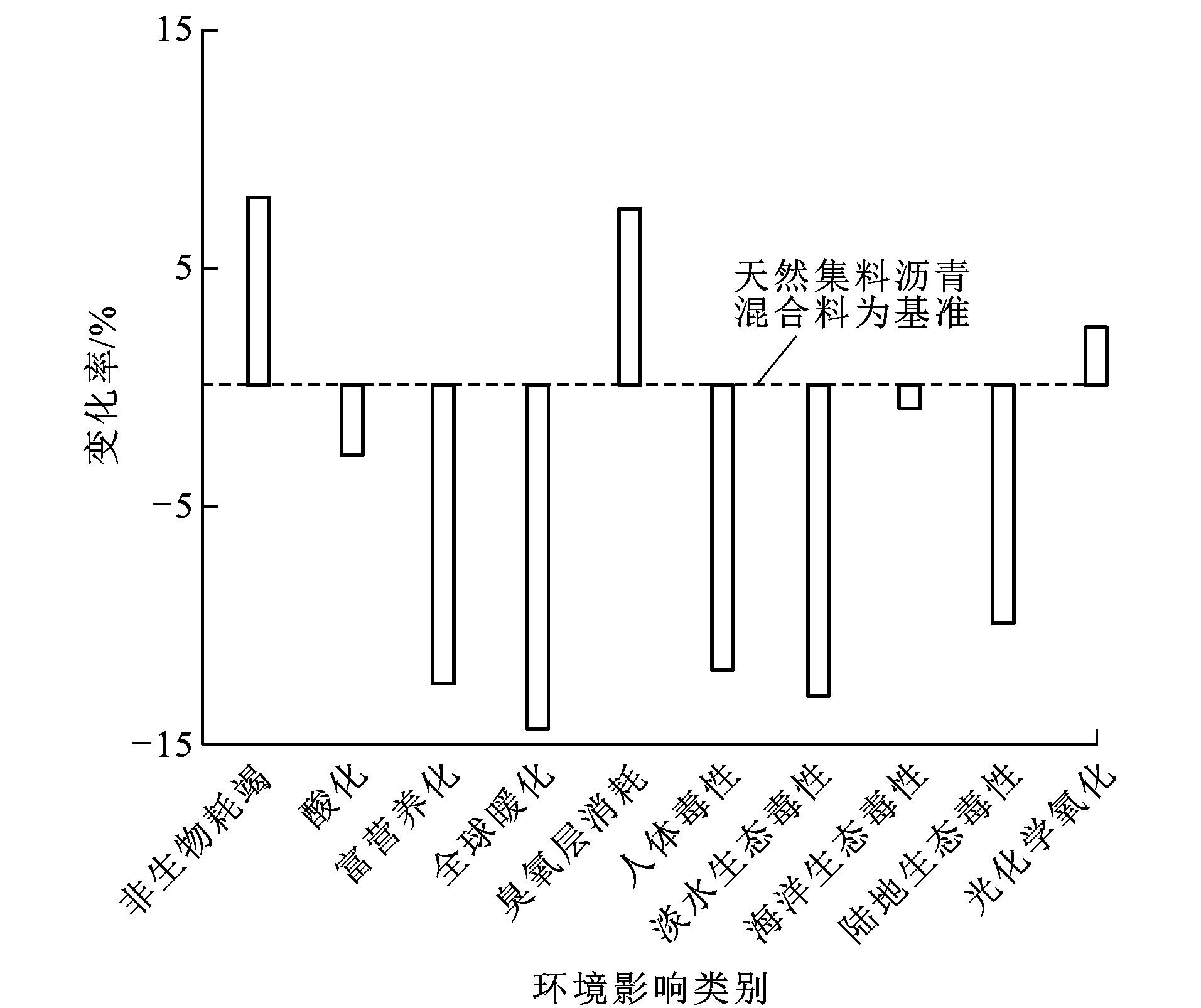
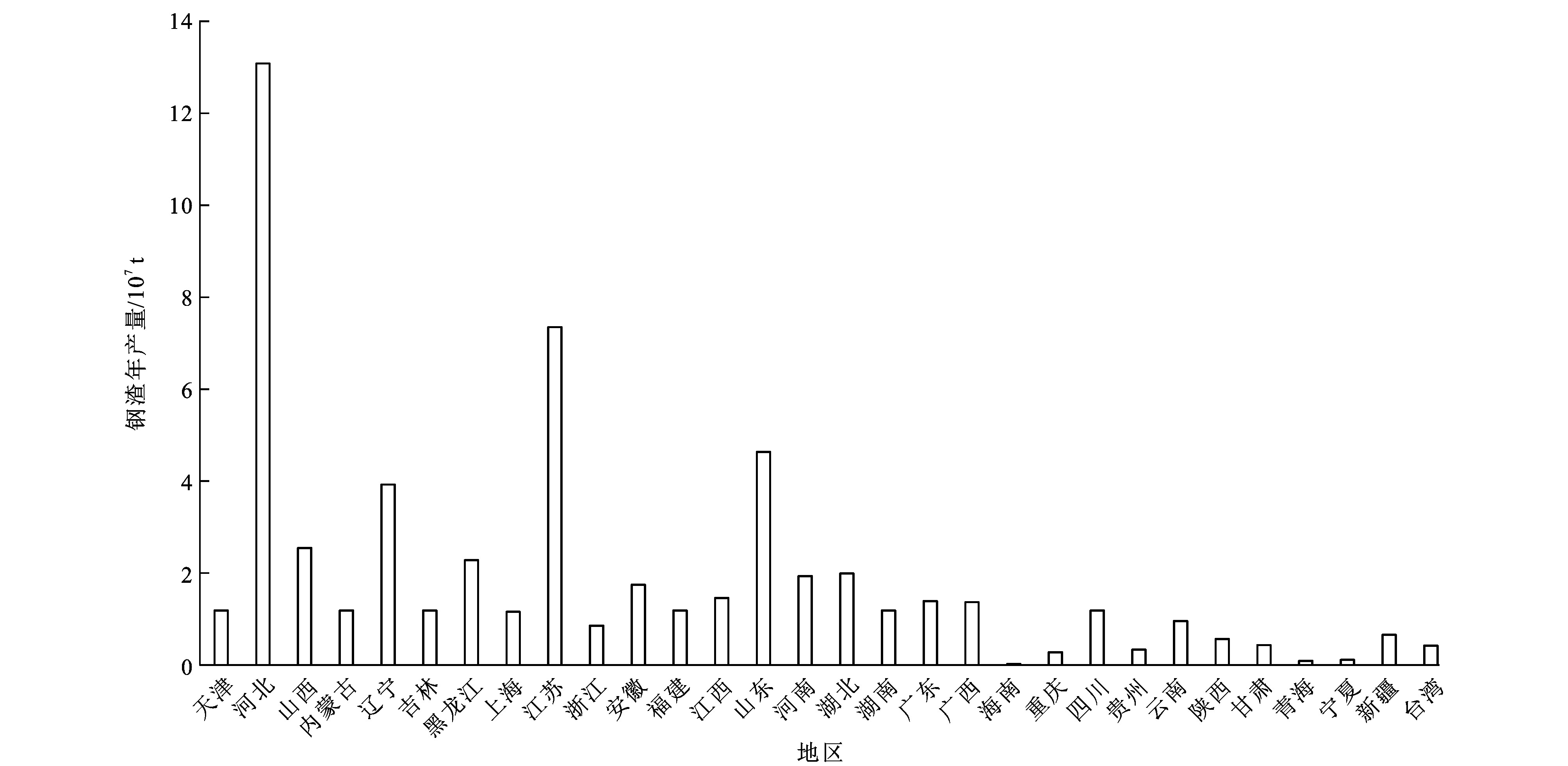
摘要:
总结了钢渣的物理性质、化学成分及矿物相组成; 分析了影响钢渣体积安定性的因素及其改善措施; 探讨了钢渣沥青混合料的配合比设计方法; 分析了钢渣沥青混合料的路用性能(高温稳定性、低温抗裂性、水稳定性、抗疲劳性、体积安定性、抗滑性)及其功能特性(导电性与微波加热); 研究了钢渣沥青混合料的生态、社会及经济效益; 介绍了国内外的工程应用。研究结果表明: 钢渣可用于沥青混合料, 且应为陈化半年以上的转炉钢渣或电炉钢渣; 钢渣的物理力学性能优良, 而化学成分及矿物相组成受炼钢工艺影响有所区别; 钢渣体积安定性的不足可通过预处理或陈化处理得到较好的改善; 钢渣沥青混合料的配合比设计要点包括钢渣替代传统集料的方式和比例、沥青混合料级配修正、有效相对密度测定以及最佳油石比的确定; 钢渣沥青混合料的路用性能及功能特性优于天然集料沥青混合料, 具有较好的环境影响性且综合经济效益更高; 关于钢渣沥青混合料路用性能的研究较多, 而作用机理方面相对缺乏, 关键性的限制因素如密度较高、体积安定性不良、混合料沥青用量增加等仍未得到根本性解决; 未来应重点研究钢渣沥青路面的长期性能及质量控制体系, 并开展全寿命周期研究, 以加快钢渣沥青路面的应用与推广。
更多>
2020, 20(2): 15-33.
doi:
10.19818/j.cnki.1671-1637.2020.02.002
摘要
(
7175
)
HTML
(
2119
)
PDF (4751KB)
(
1199
)
引用
(
)
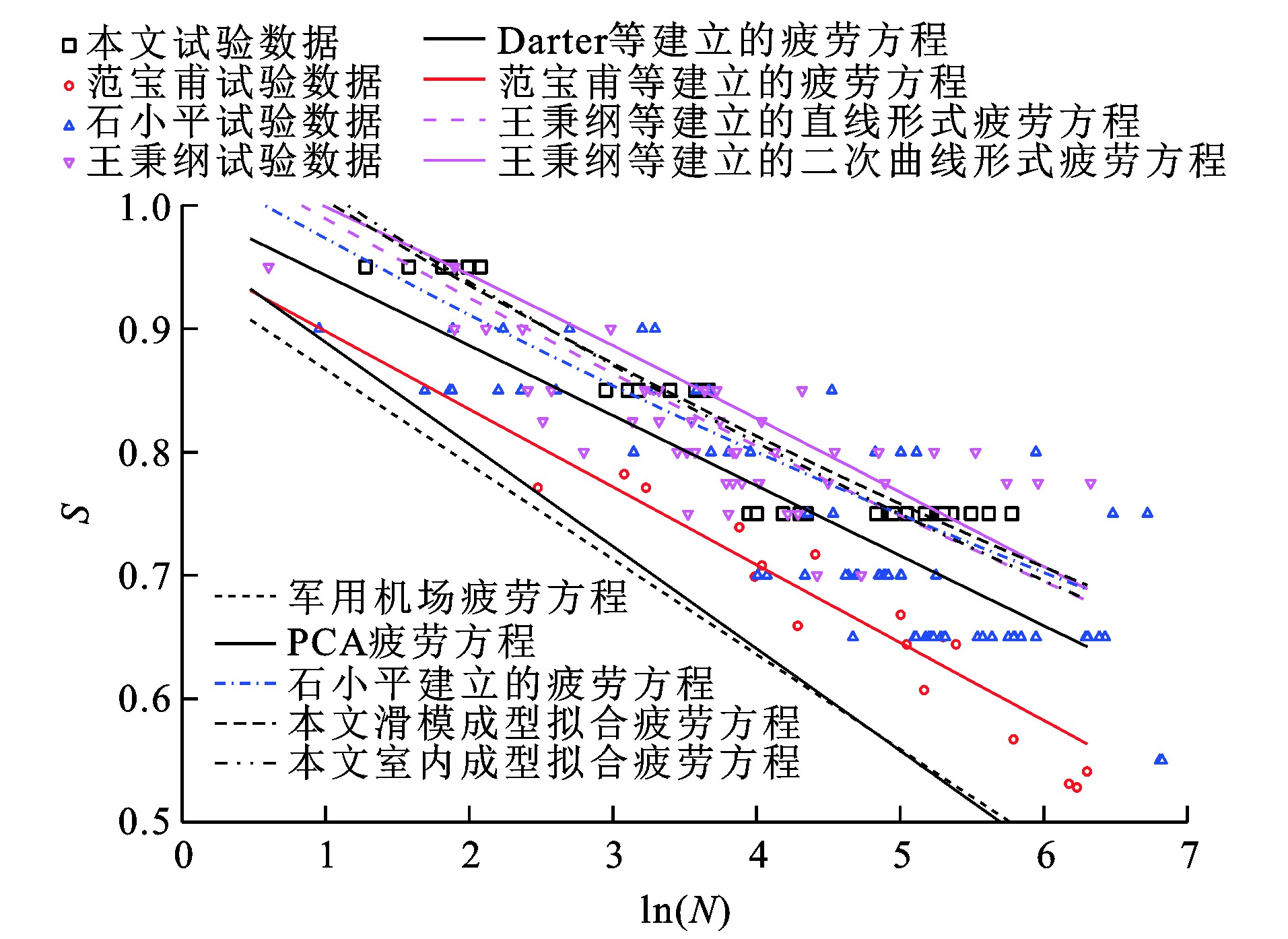
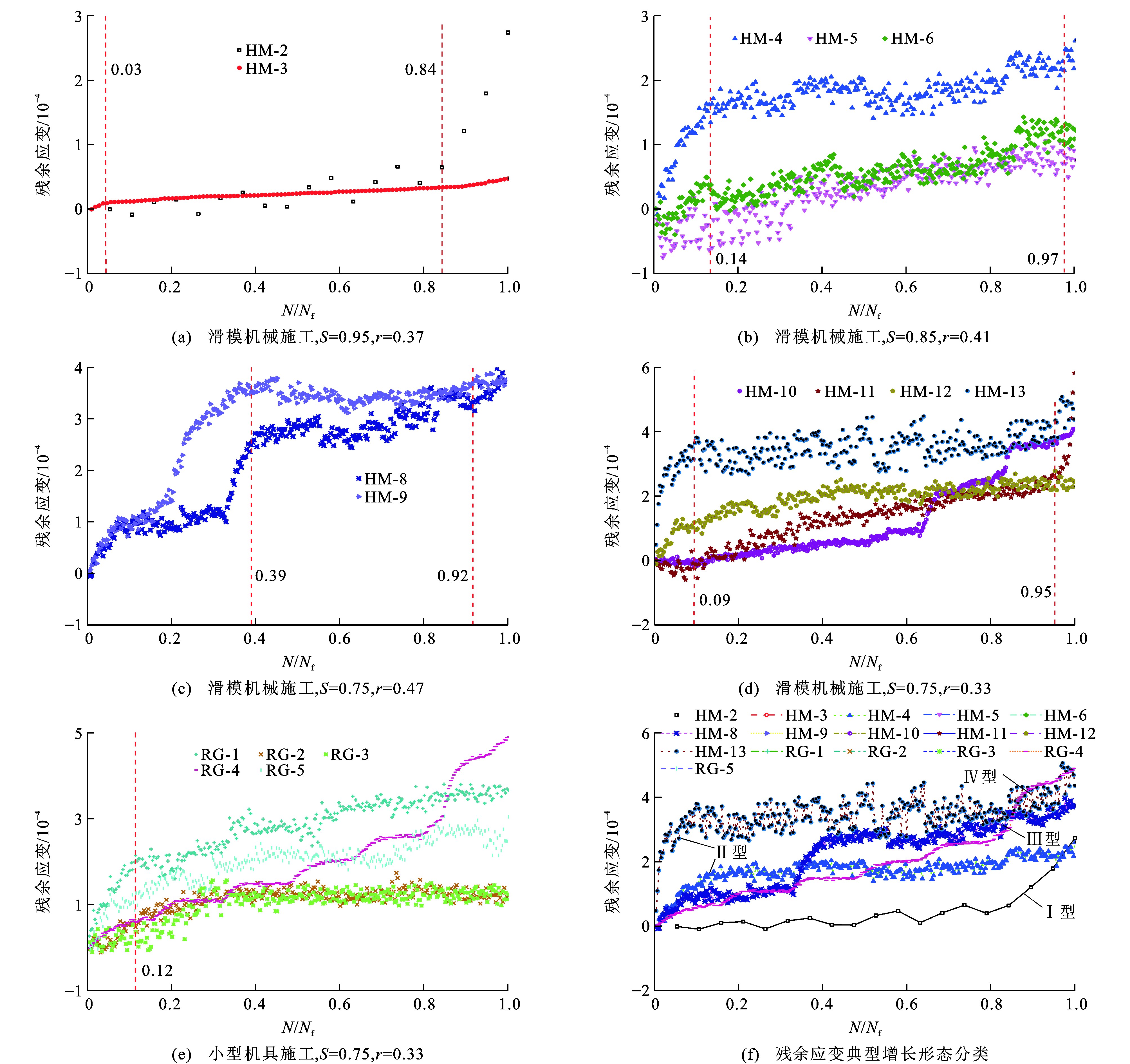
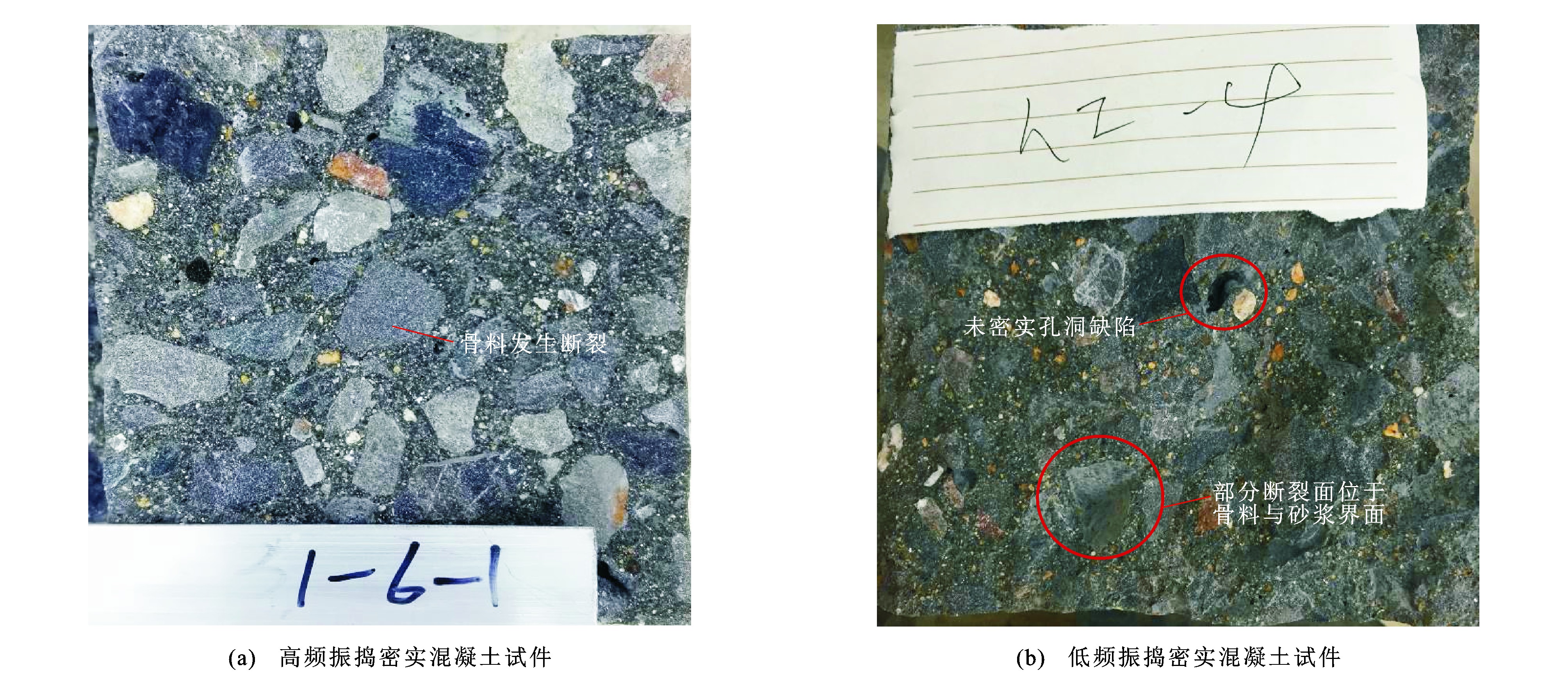
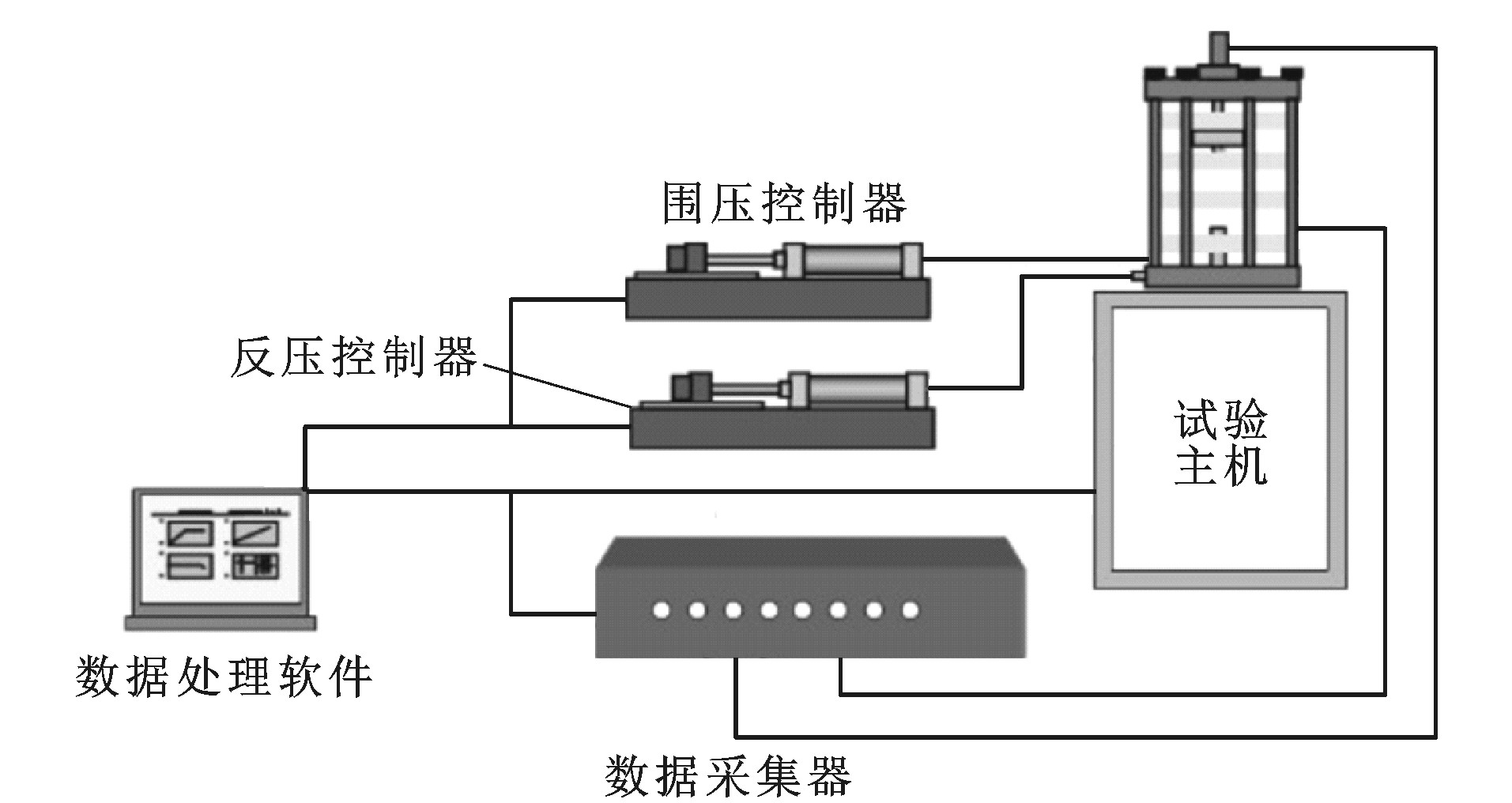
机场道面高频振捣密实混凝土弯曲疲劳性能演化特征
权磊
,
田波
,
李思李
,
何哲
,
贺凯涵
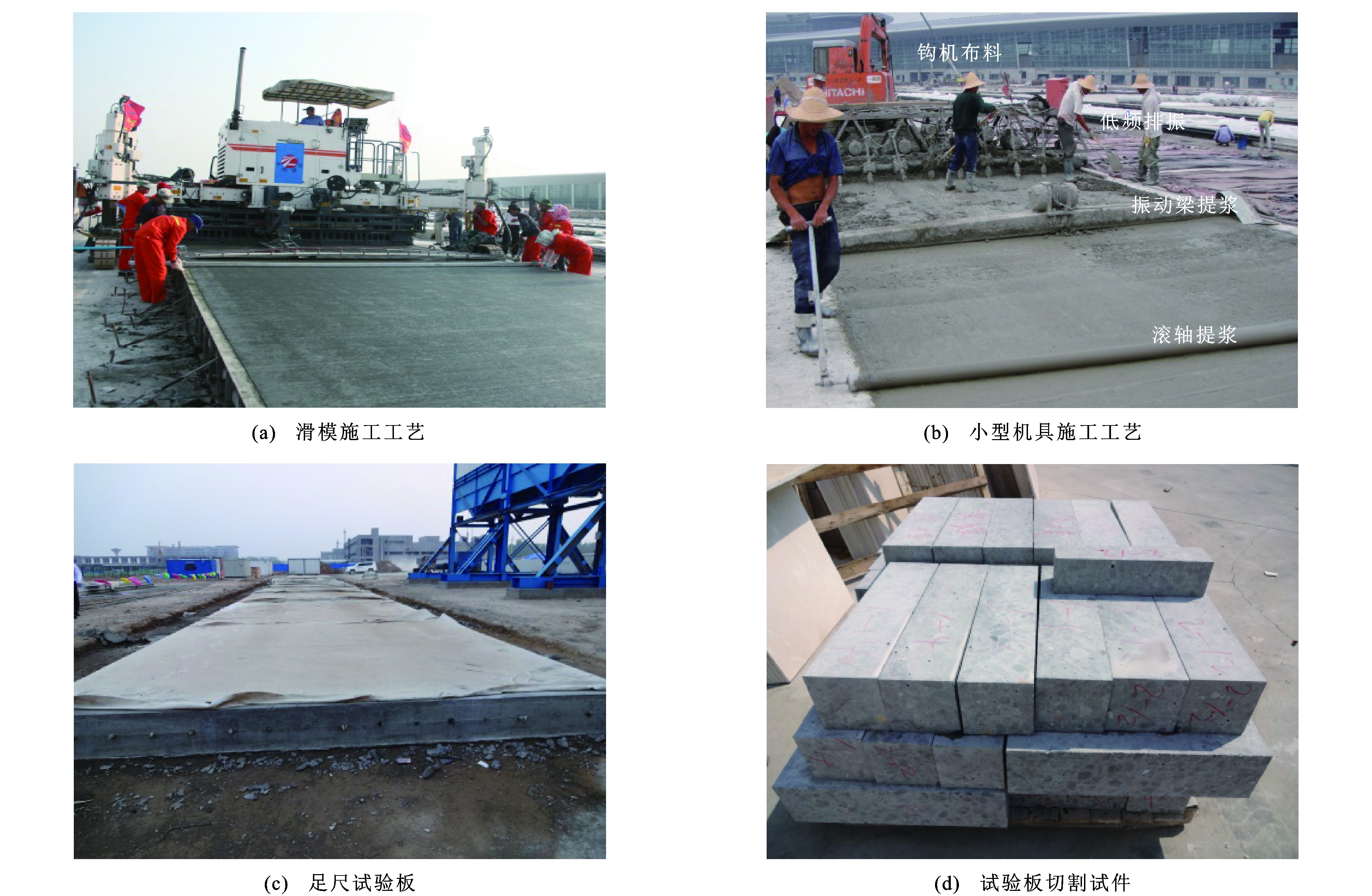
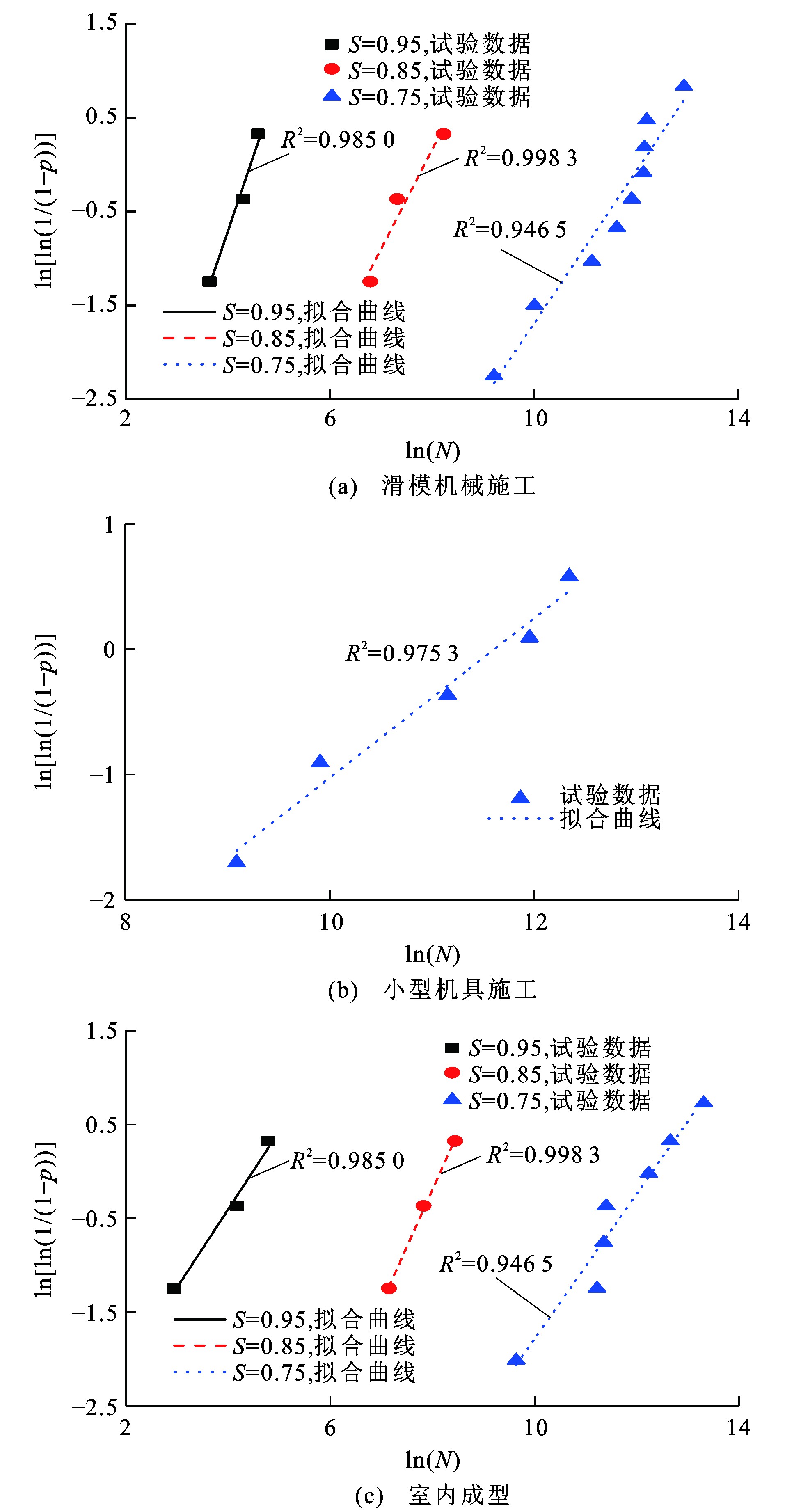
摘要:
为了验证高频振捣滑模摊铺工艺的可靠性及其对含大粒径骨料(最大粒径为40 mm)干硬性混凝土疲劳演化特征的影响, 分别采用小型机具施工工艺(低频振捣)和滑模施工工艺(高频振捣)在郑州新郑机场摊铺40 cm厚混凝土道面板; 对现场切割试件与室内相同配比成型的试件(尺寸均为150 mm×150 mm×550 mm)进行了弯拉强度与疲劳试验, 测量了跨中梁底应变和竖向位移; 根据可靠度理论分析了不同工艺成型混凝土小梁的弯曲疲劳寿命概率分布特征, 建立了弯曲疲劳方程, 进一步分析了试件的弹性模量衰减特征和梁底残余拉伸应变演变规律。研究结果表明: 高频振捣工艺能使混凝土更加致密, 试件平均疲劳寿命较低频振动成型试件长约27%;双对数疲劳方程能够很好地表征含大粒径骨料道面混凝土的疲劳行为; 高应力水平下高频振捣成型混凝土疲劳寿命比室内成型混凝土长4%, 低应力水平下高频振捣成型混凝土疲劳寿命比室内成型混凝土长18%以上; 混凝土抗弯拉弹性模量随加载循环比的增加基本呈线性衰减特征, 试件临近破坏时的抗弯拉弹性模量为初始模量的50%~80%;在重复荷载作用下, 梁底轴向残余应变随加载次数的增加而增大; 提出的4种典型演化形态可表征不同应力水平下混凝土残余应变的复杂增长趋势; 骨料粒径增大是导致试件疲劳性能演变规律离散性的主要原因, 疲劳荷载作用下的累积损伤和骨料依次失效过程是混凝土残余应变演化曲线出现明显台阶特征的主要原因。研究结果为进一步通过足尺环道加速加载试验建立室内试验与现场足尺道面板性能关联方程奠定了基础。
更多>
2020, 20(2): 34-45.
doi:
10.19818/j.cnki.1671-1637.2020.02.003
摘要
(
1975
)
HTML
(
473
)
PDF (4369KB)
(
471
)
引用
(
)
熔融石英砂动力特性动三轴试验
魏平
,
鲍宁
,
魏静
,
陈建峰
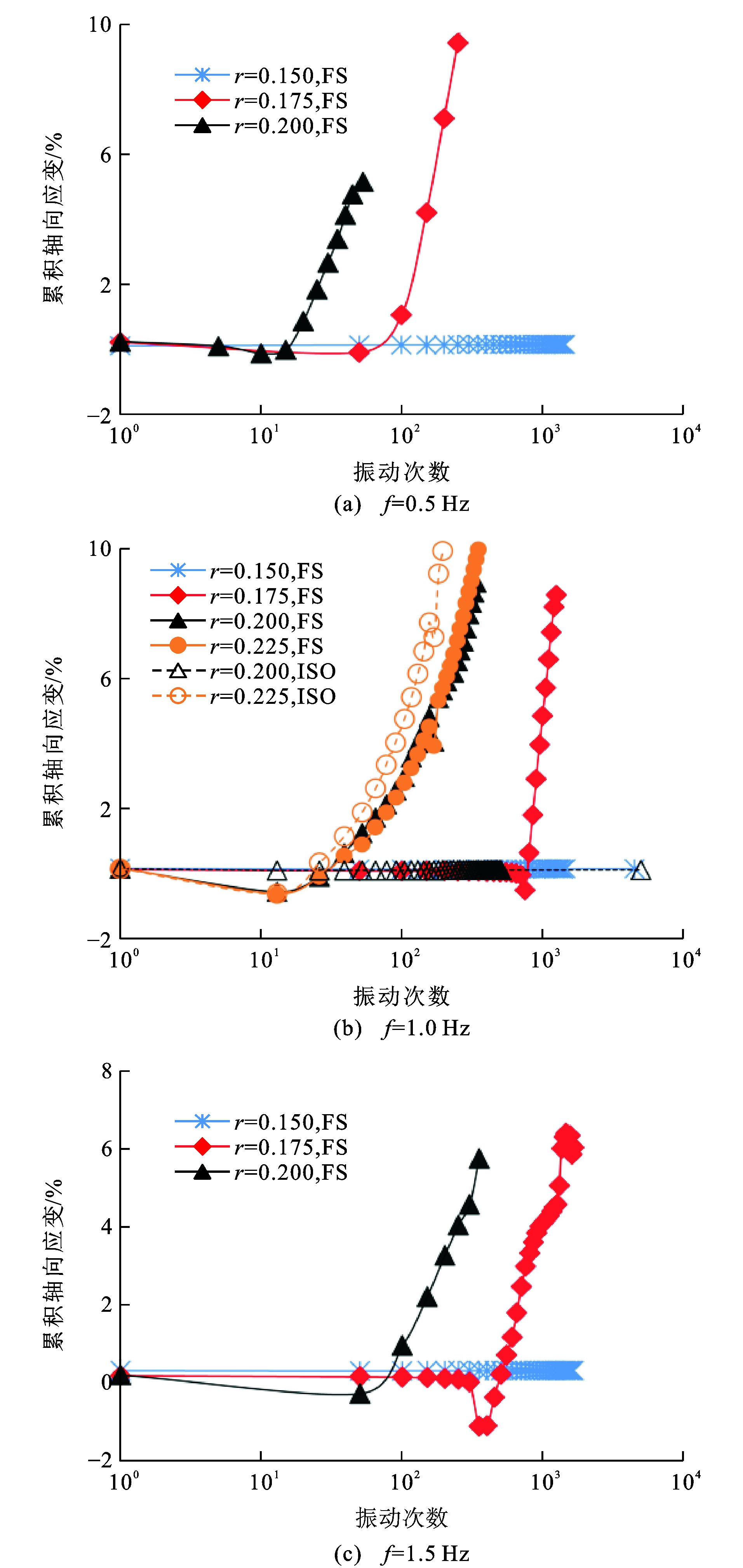
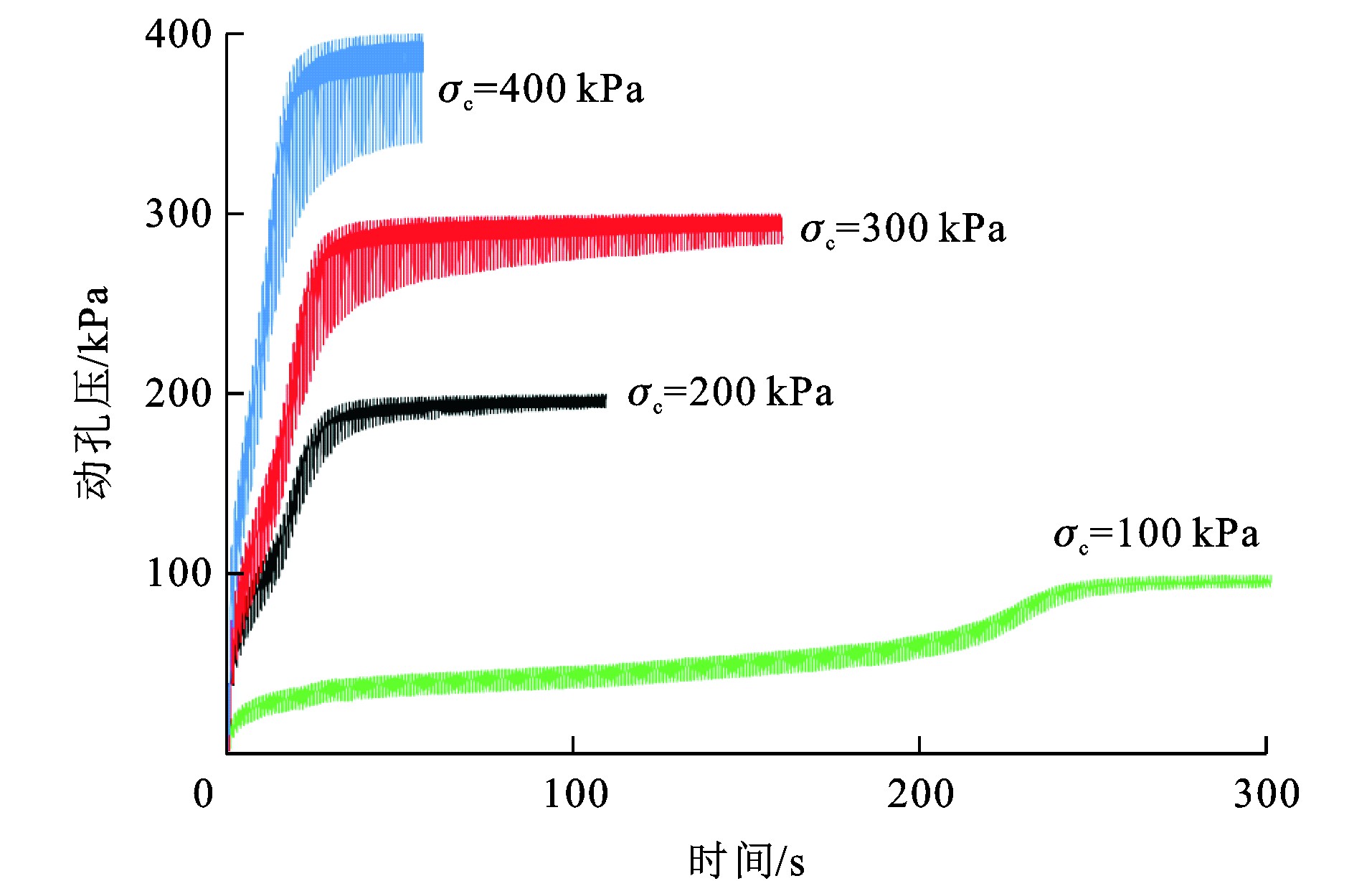
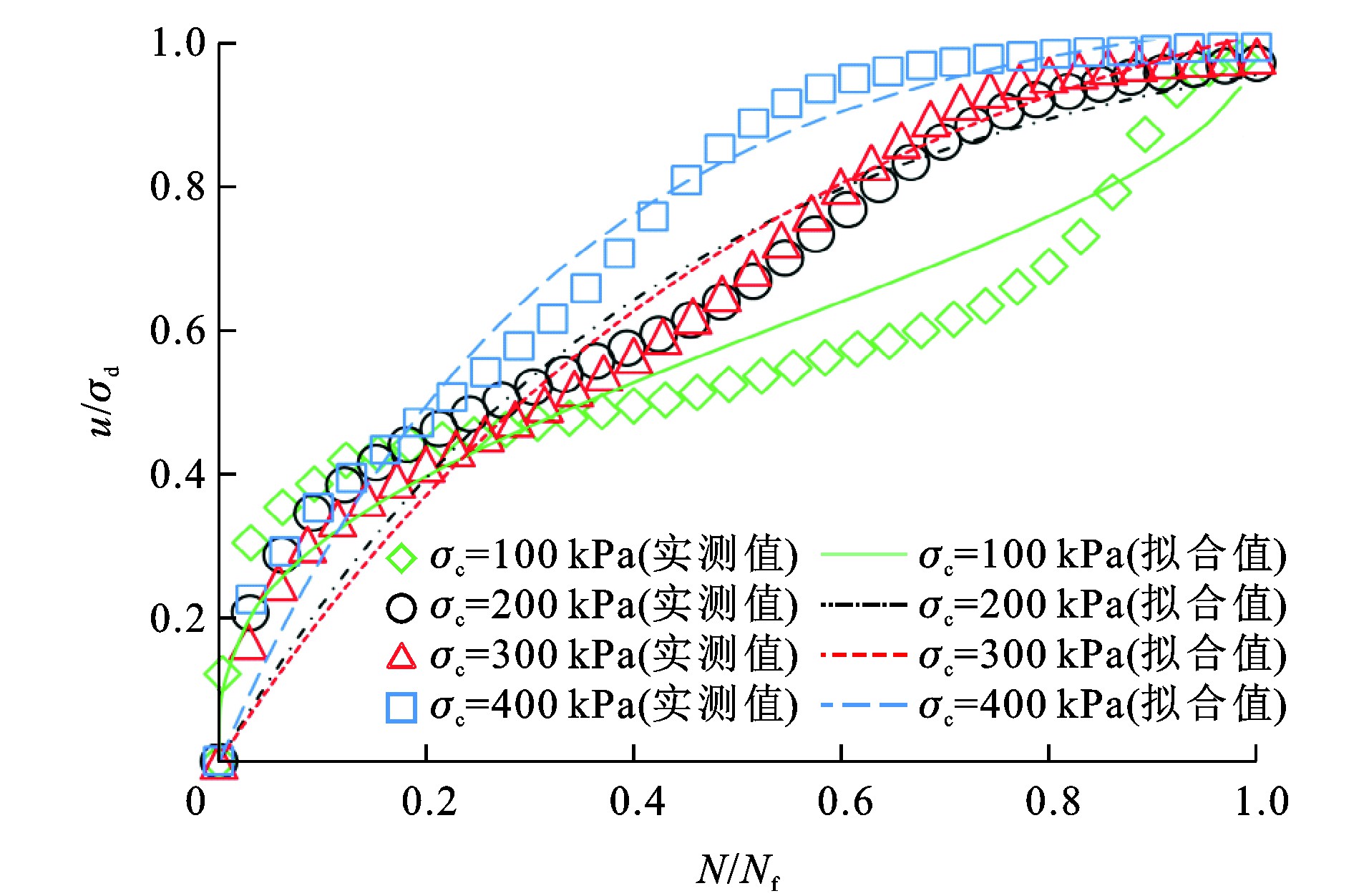
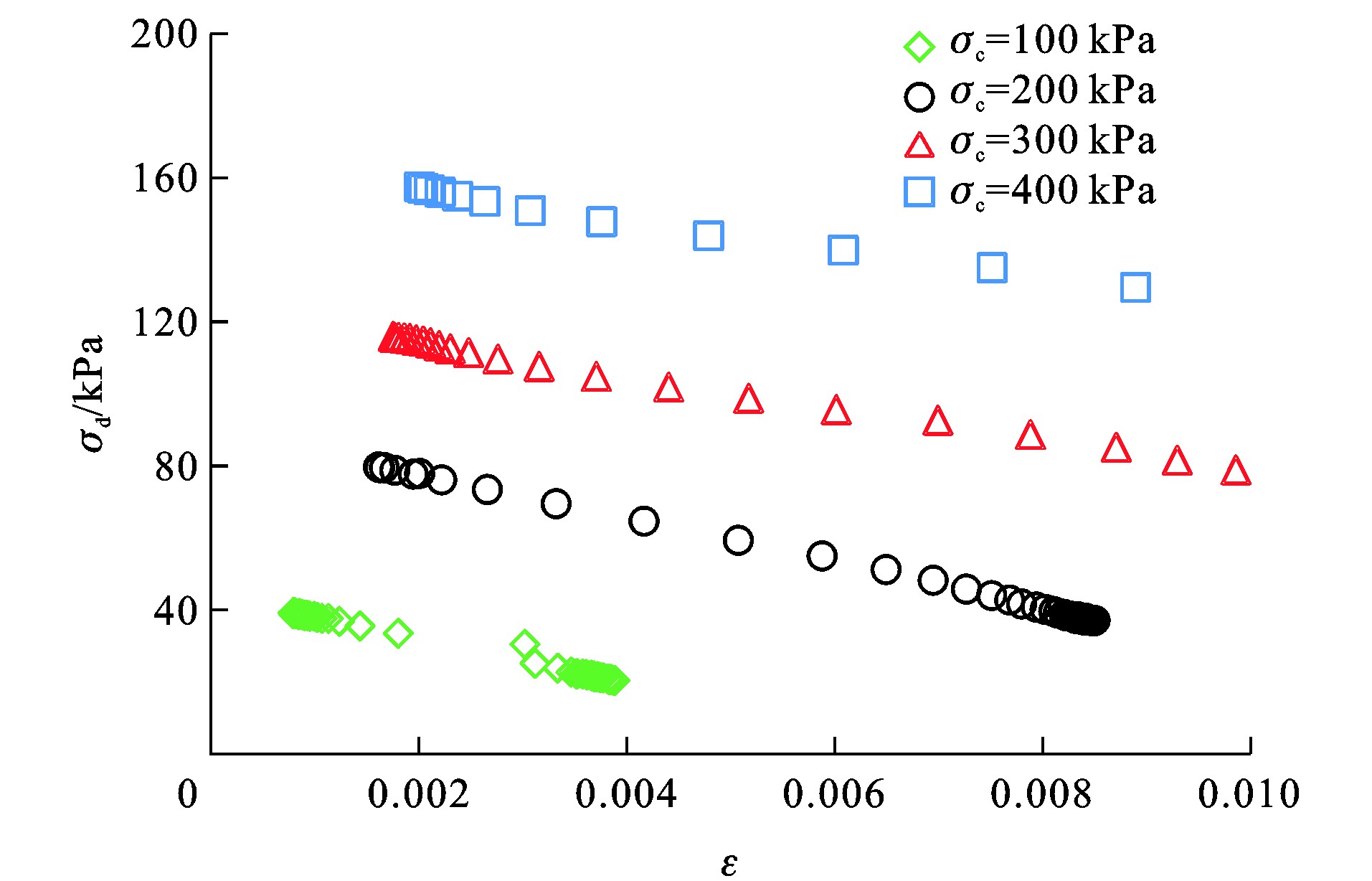
摘要:
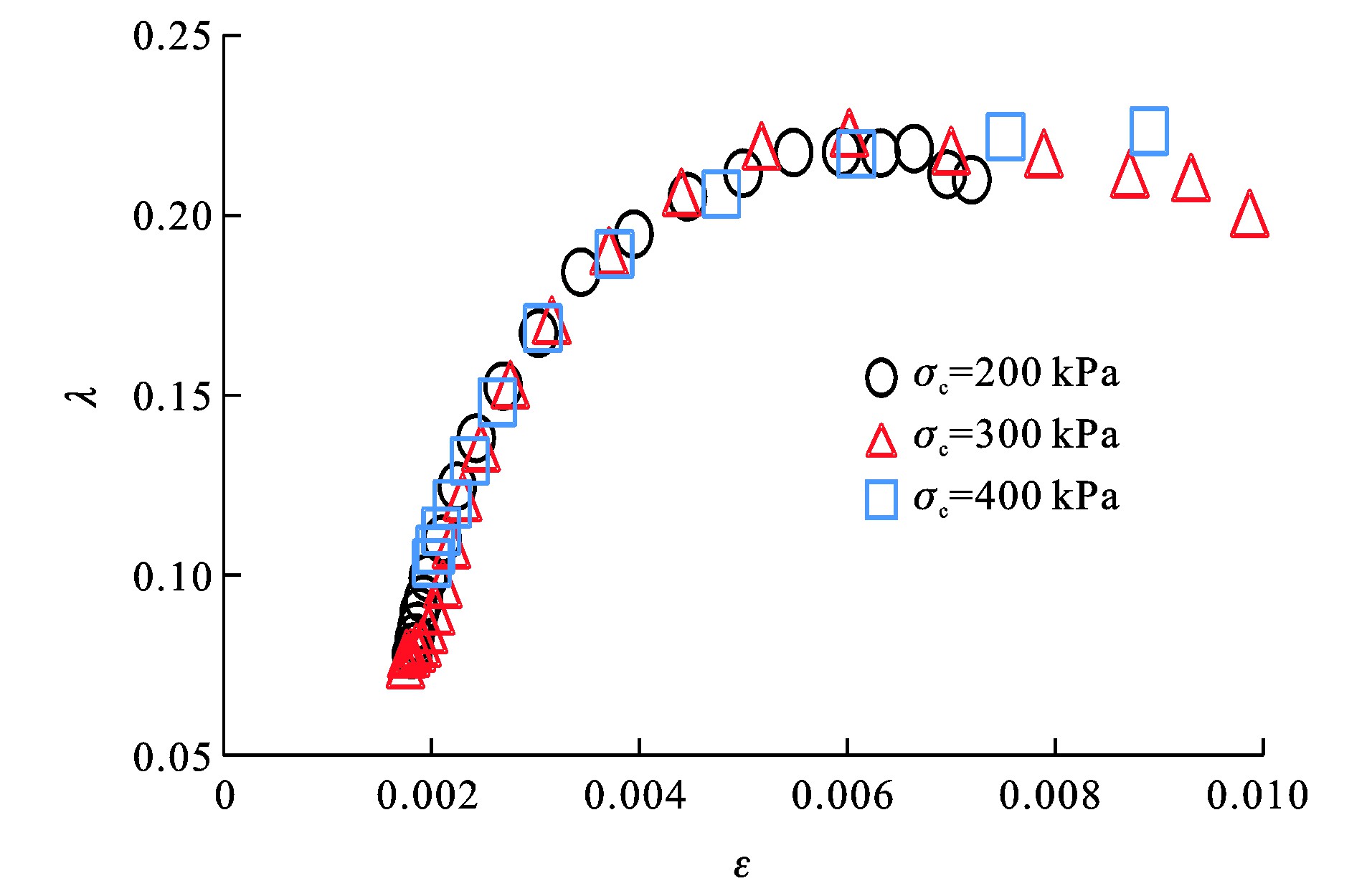
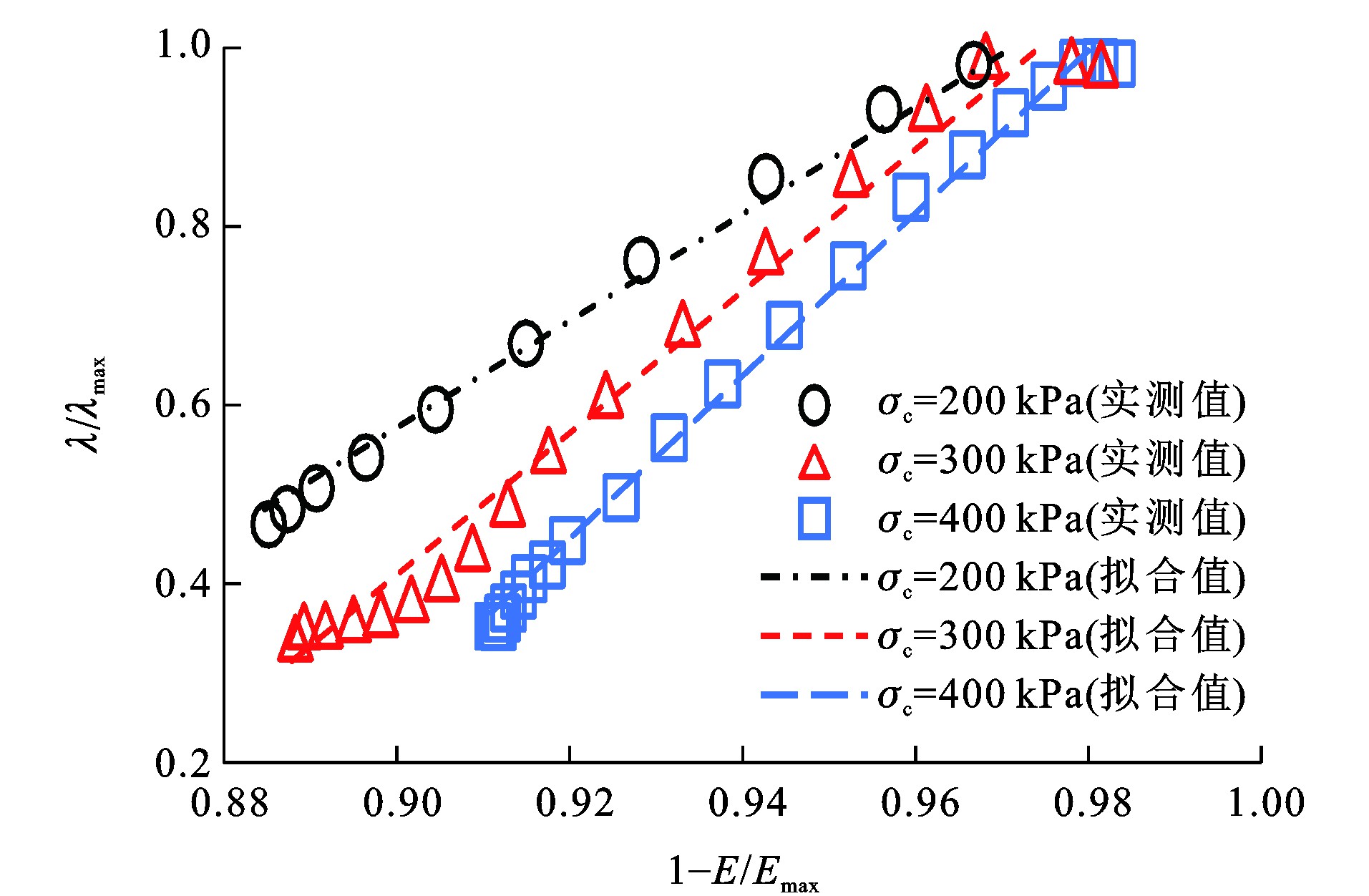
为探究振动荷载作用下熔融石英砂液化破坏过程中动变形和动强度变化规律, 促进透明土技术在岩土工程动力特性可视化模型试验中的推广和应用, 对构成透明砂土骨架结构的典型粒径(0.5~1.0 mm)熔融石英砂开展饱和试样动三轴试验; 研究了不同围压、加载频率和动应力比等试验条件下熔融石英砂试样的累积轴向应变、动孔压发展模式、动应力衰减、动弹性模量和阻尼比的变化规律, 并将试验结果与相同级配的标准砂进行了对比。分析结果表明: 熔融石英砂累积轴向应变随动应力比的增大呈现出由稳定型向破坏型转变的趋势, 加载频率为0.5~1.5 Hz时, 临界动应力比为0.150~0.175, 小于标准砂的0.200~0.225;升高围压、增大动应力比、降低加载频率会加快试样塑性应变累积, 缩短液化破坏时间; 熔融石英砂孔压发展模式随围压增大逐渐由Seed孔压模型向指数型过渡, 增大加载动应力会加剧液化破坏后孔压的振动幅度; 相同动应力比下, 熔融石英砂与标准砂的动应力与动应变呈现线性相关, 在围压大于200 kPa时, 二者动应力衰减幅度随围压的增大而逐渐减小; 熔融石英砂的动弹性模量和阻尼比表现为线性关系, 动弹性模量随动应变的增大呈现出双曲线型减小的趋势, 并随围压的增大而增大; 阻尼比随动应变的增加先增大后基本稳定在0.22, 发展曲线受围压影响较小。
更多>
2020, 20(2): 46-54.
doi:
10.19818/j.cnki.1671-1637.2020.02.004
摘要
(
1722
)
HTML
(
423
)
PDF (2149KB)
(
468
)
引用
(
)
基于熵权-灰关联法的岩质开挖边坡安全评价模型
冯忠居
,
朱彦名
,
高雪池
,
龙厚胜
,
王富春
,
赵瑞欣
,
文军强
,
王桂君
,
王政斌
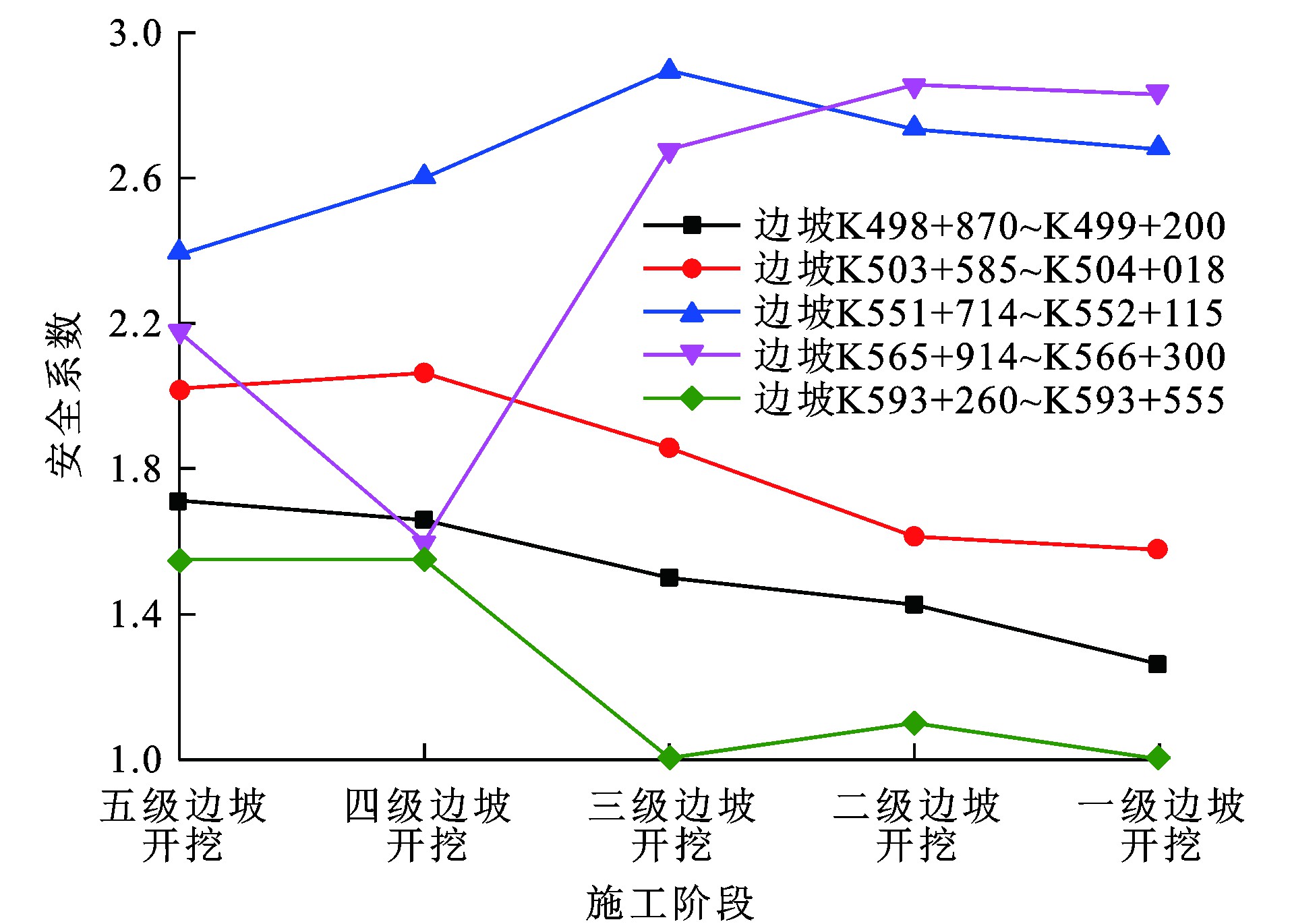
摘要:
根据边坡稳定性评价体系, 选取边坡岩体质量评分、边坡开挖方法调整系数、高度修正系数、结构面调整系数、结构面调整值5个评价指标反映边坡的整体稳定性, 并作为安全评价模型的序列变量; 建立了熵权-灰关联安全评价模型, 将目标边坡作为系统特征序列, 12处岩质边坡作为相关因素序列, 评价了京沪高速改扩建工程沿线典型岩质边坡的安全性, 并提出工程建议; 采用FLAC3D仿真软件, 分析了不同阶段机械开挖和不同炮孔处静力爆破条件下边坡的稳定性变化规律, 以验证安全评价模型的准确性。分析结果表明: 边坡稳定性评价指标可较好地反映边坡的稳定性特征; 熵权-灰关联安全评价模型充分发挥了灰关联法在小样本数据分析的优点, 且由熵权法计算的指标权重改善了传统灰关联分析中由专家打分或平均赋权的缺陷, 使评价结果更加客观; 三级边坡和一级边坡的开挖使边坡K593+260~K593+555的安全系数分别降至1.01和1.00, 和上一级边坡相比降幅分别为34.8%、9.1%, 说明缓倾顺层岩质边坡的开挖会使岩层沿结构面滑动, 使边坡失稳; 瞬时动荷载和荷载积累效应控制静力爆破条件下边坡的稳定性, 瞬时动荷载的出现使边坡安全系数下降了7.7%, 荷载积累效应的消散使安全系数平均回升3.6%, 说明爆破对边坡的松动作用明显, 荷载积累的消散使边坡的稳定性提升。
更多>
2020, 20(2): 55-65.
doi:
10.19818/j.cnki.1671-1637.2020.02.005
摘要
(
2081
)
HTML
(
631
)
PDF (1982KB)
(
465
)
引用
(
)
载运工具运用工程
基于因子模型的跨坐式单轨车辆抗倾覆性能
王超冉
,
季元进
,
任利惠
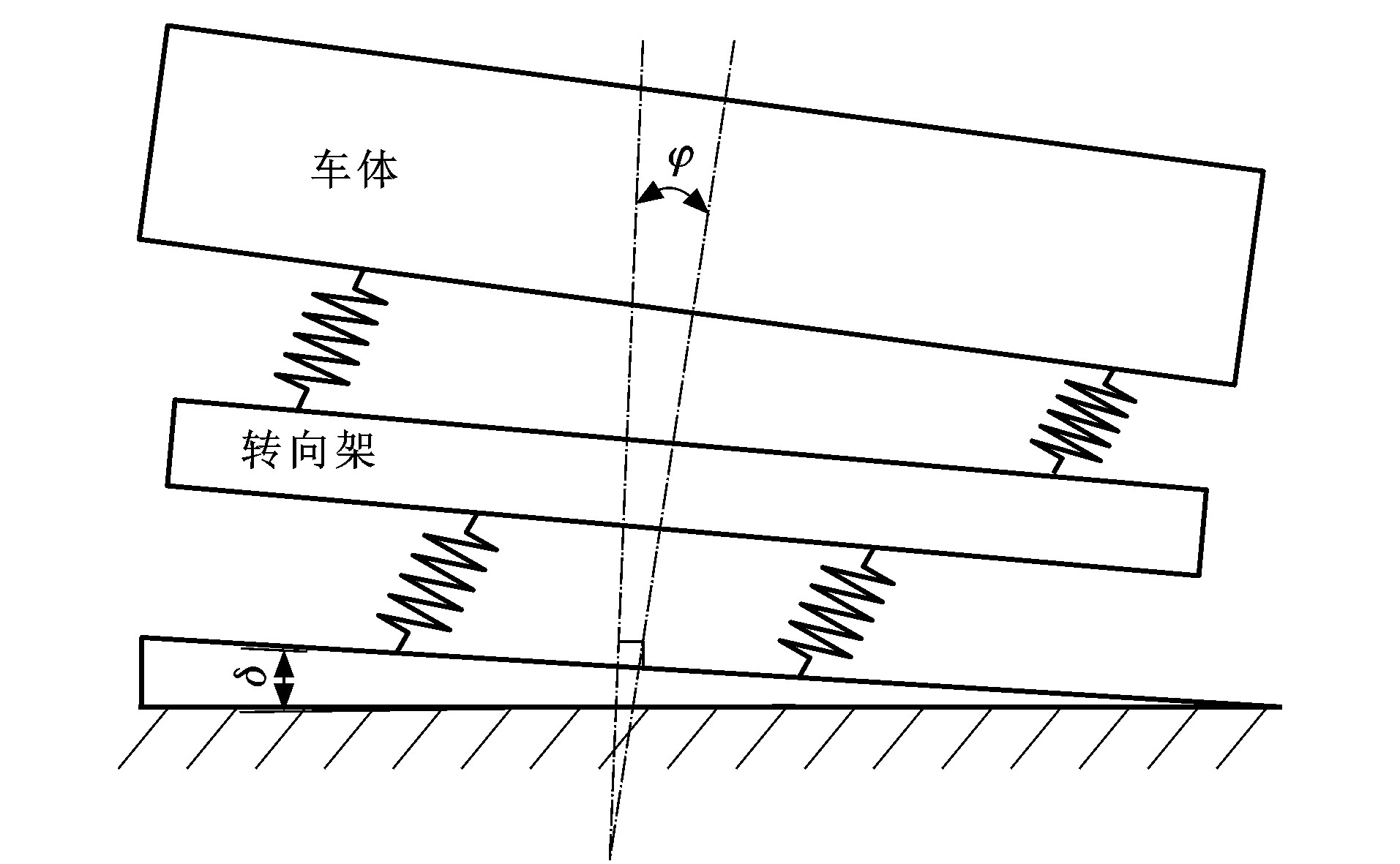
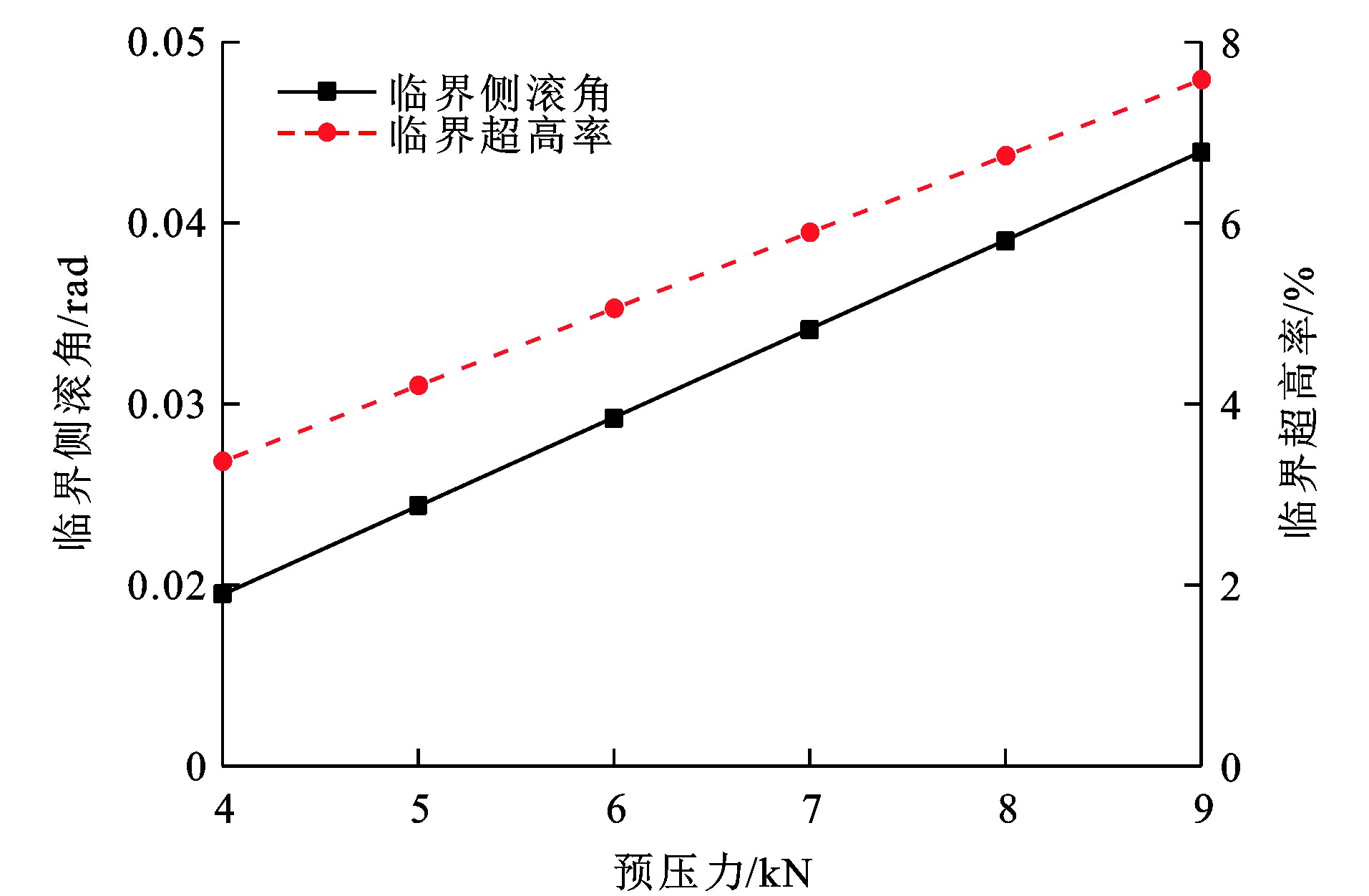
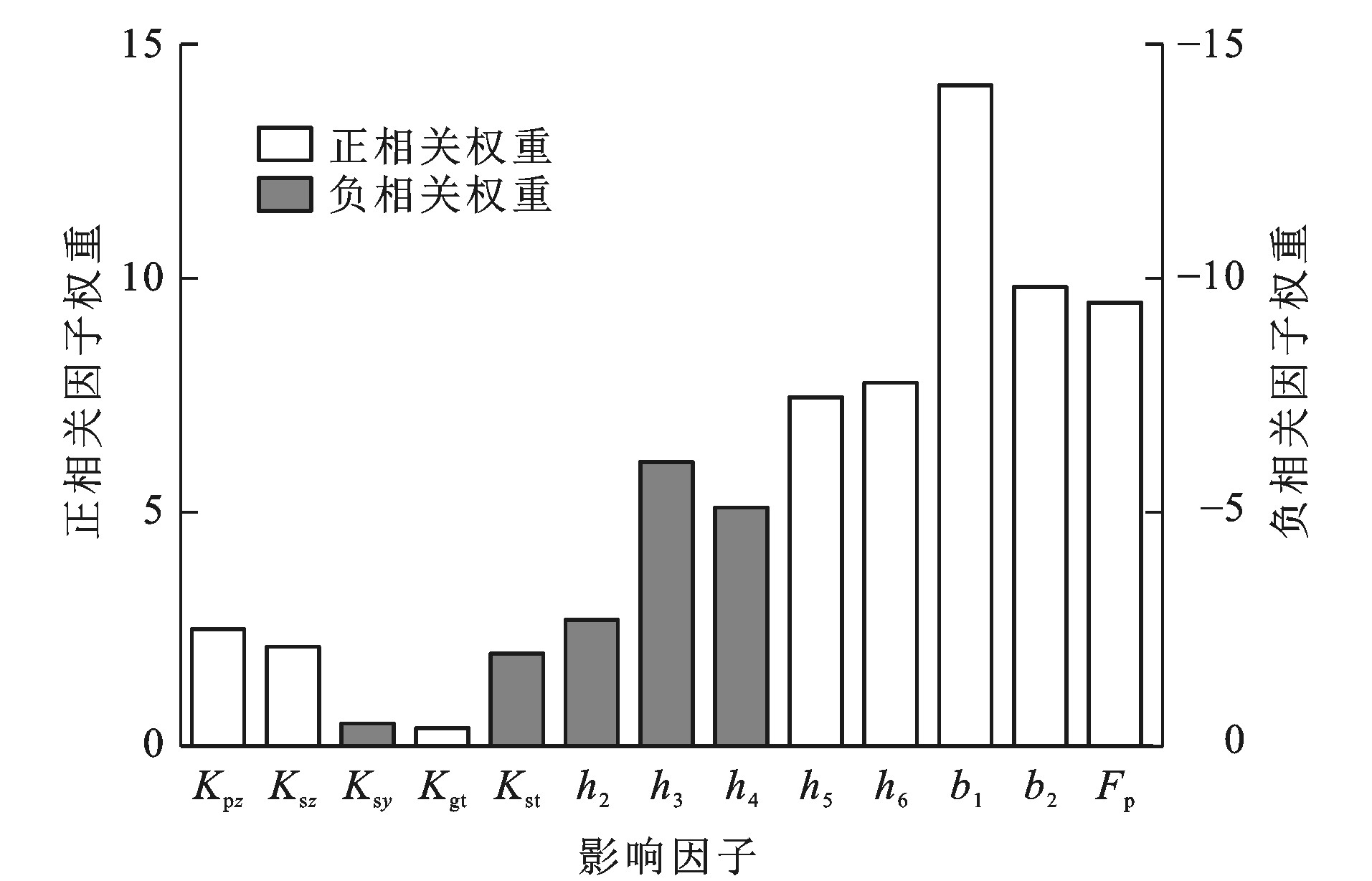
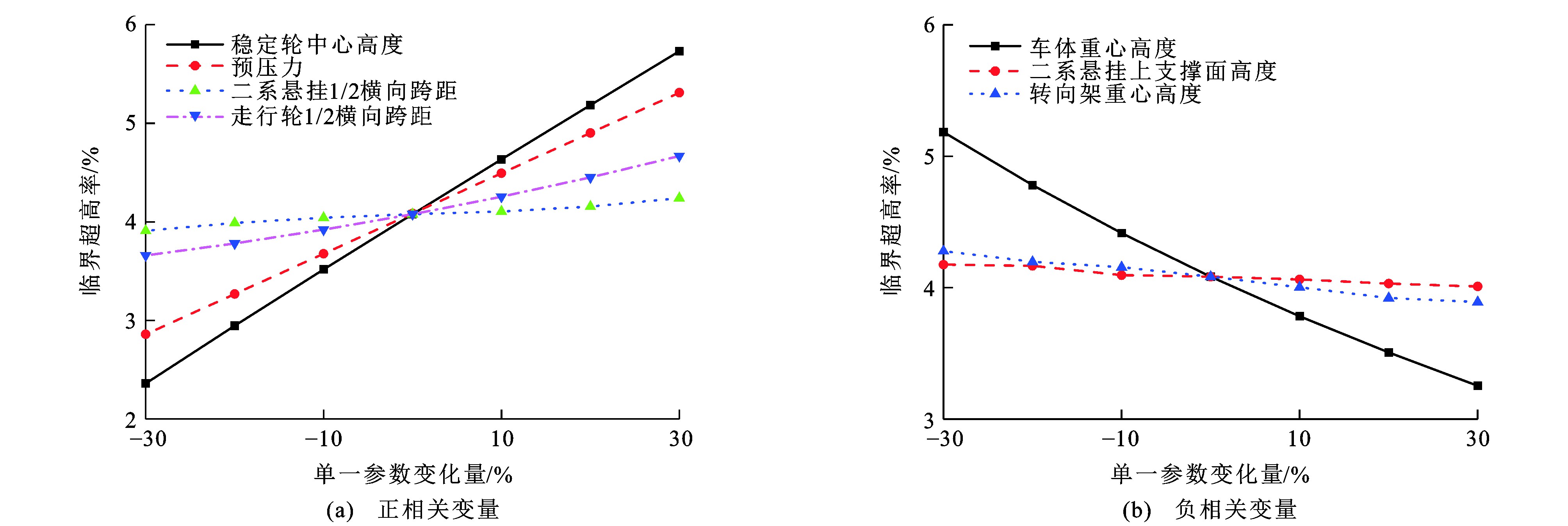
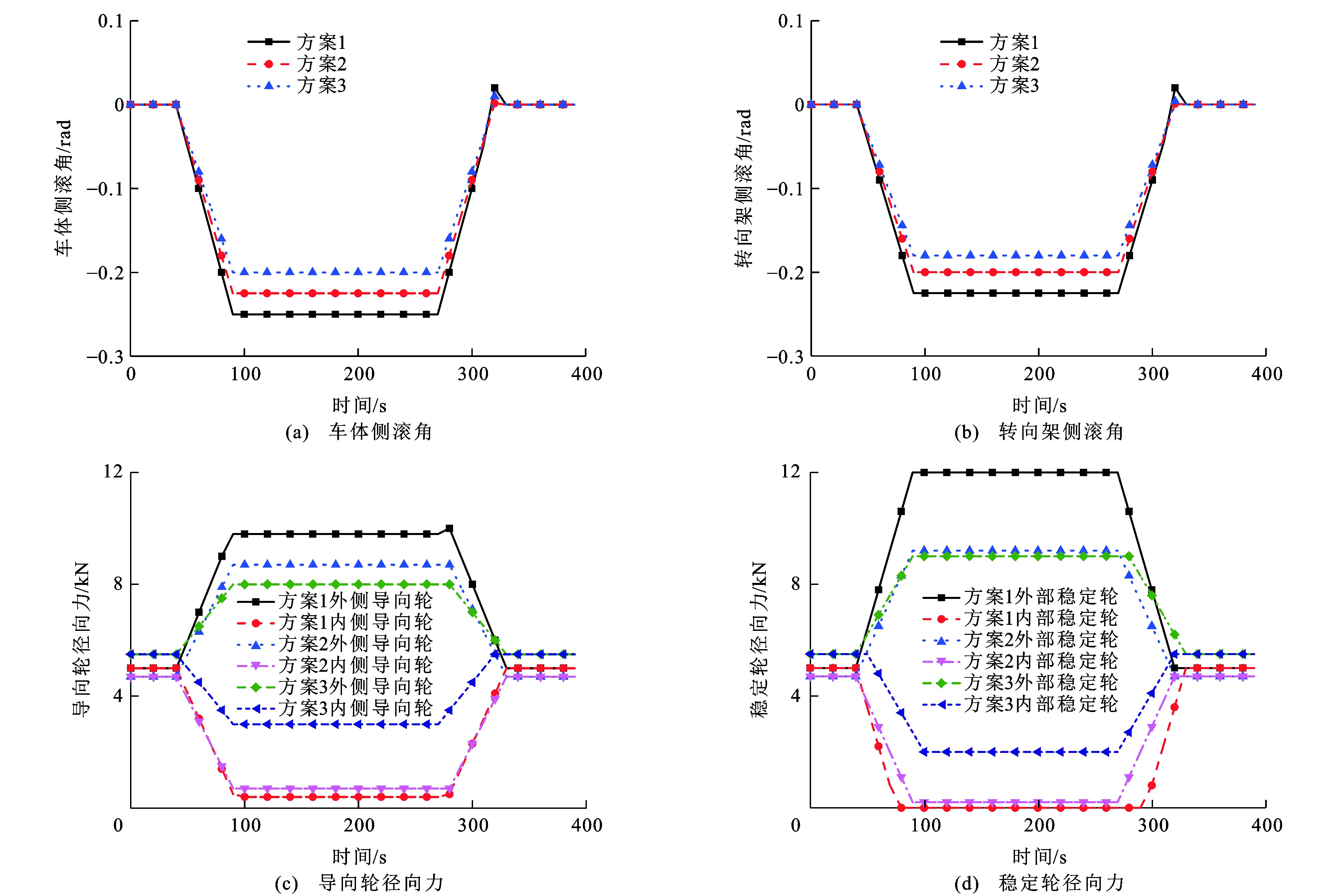
摘要:
针对跨坐式单轨车辆抗倾覆性能影响因素繁多且复杂的特点, 利用降维思想提出一种综合评价车辆抗倾覆性能的方法, 并分析其影响参数敏感性; 基于浮心高度、柔性系数和临界侧滚角的定义, 推导了针对跨坐式单轨车辆的3个指标计算方法, 讨论了3个指标的区别, 综合提出13个可量化的抗倾覆影响因子; 基于测试和仿真数据建立了跨坐式单轨车辆的抗倾覆影响因子模型, 计算得到5个主因子和各参数的影响权重; 提出以抗倾系数来综合评价跨坐式单轨车辆的抗倾覆性能, 并得到其便捷计算方法; 利用多体动力学软件Universal Mechanism建立车辆-轨道参数化动力学模型, 验证了所得到的参数权重与评价指标的准确性。分析结果表明: 跨坐式单轨车辆的浮心高度、柔性系数和临界侧滚角均能不同程度地反映车辆抗倾覆性, 但不能体现参数敏感性; 跨坐式单轨车辆的抗倾覆性能受稳定轮与轨道梁表面接触状态的影响明显, 当稳定轮一侧脱离轨面时, 车辆的抗倾覆性能下降约50%;影响车辆抗倾覆性能的5个主因子分别是稳定轮、二系悬挂、横向跨距、一系悬挂和车体; 适当降低稳定轮垂向位置和车体质心位置, 增大水平轮预压力和走行轮横向跨距可有效提高跨坐式单轨车辆的抗倾覆性能。
更多>
2020, 20(2): 66-76.
doi:
10.19818/j.cnki.1671-1637.2020.02.006
摘要
(
2379
)
HTML
(
698
)
PDF (2950KB)
(
455
)
引用
(
)
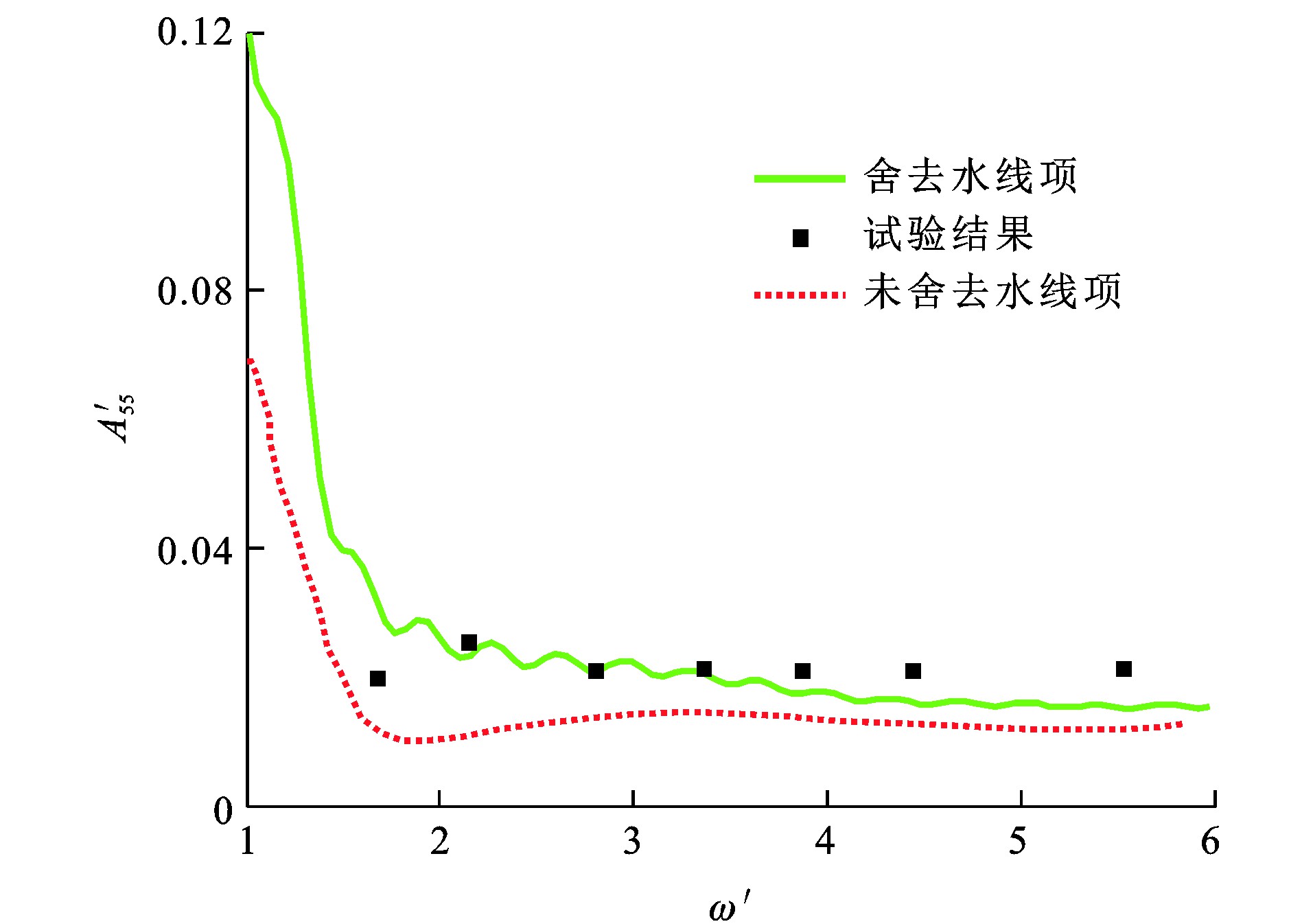
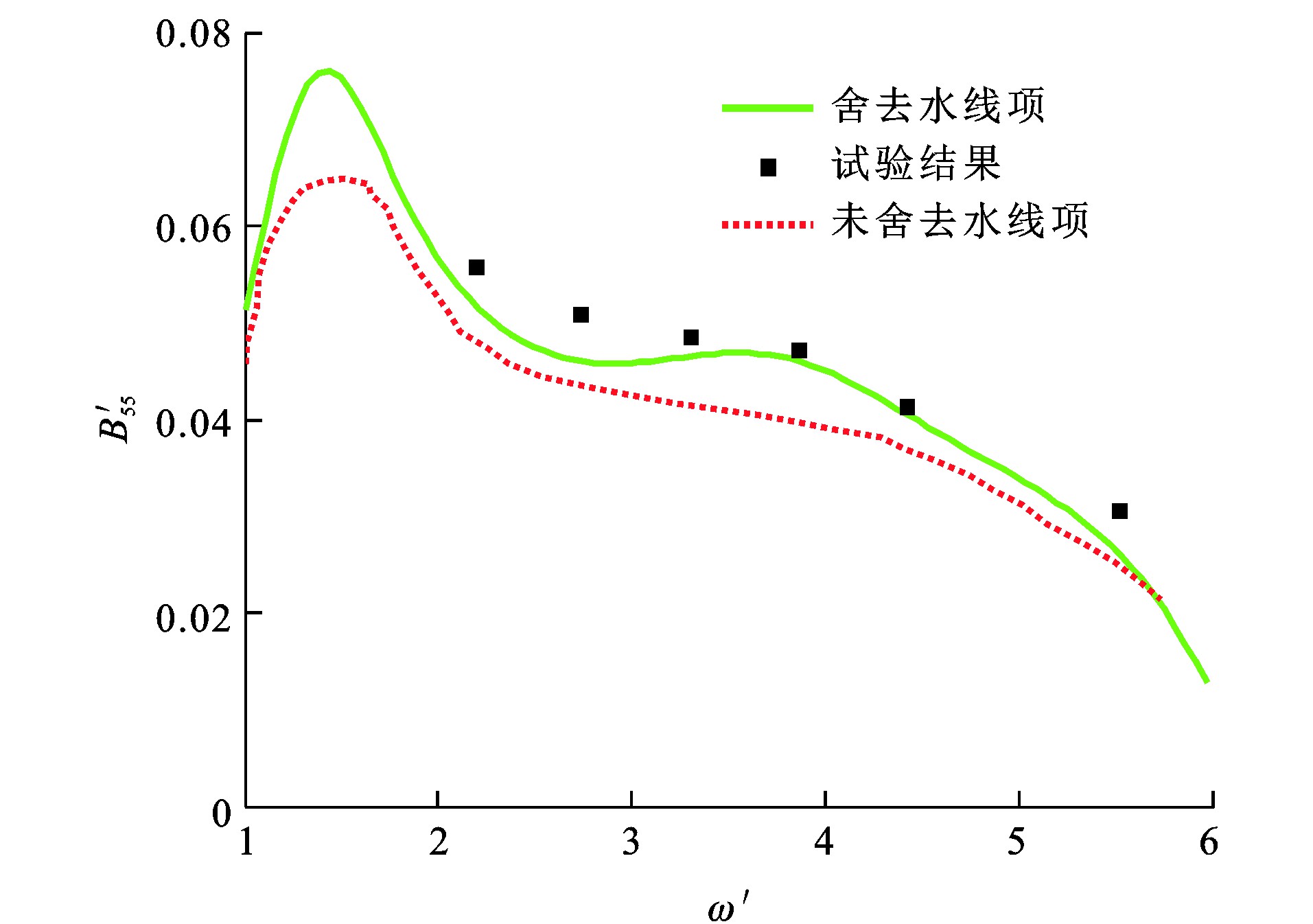
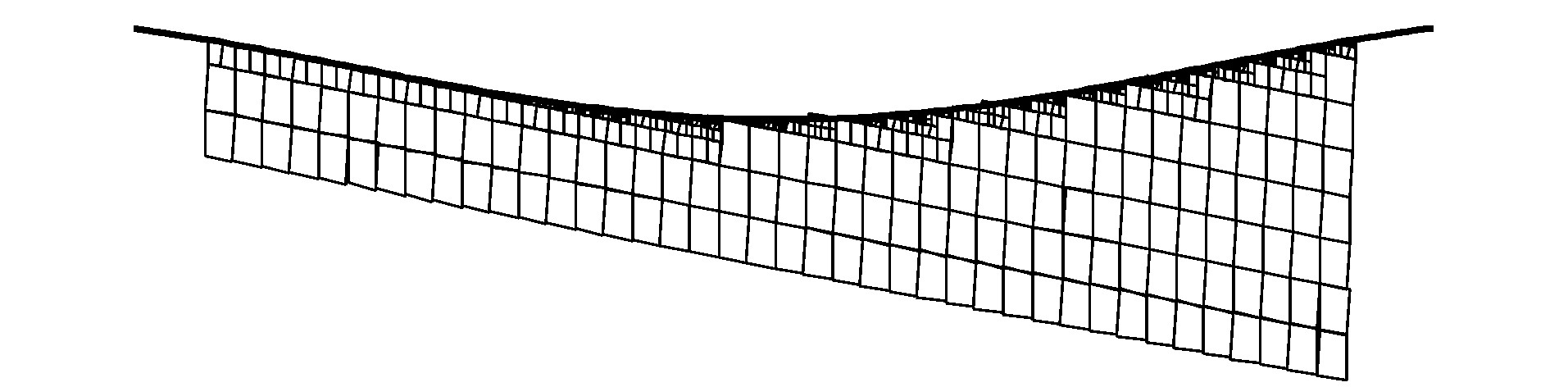
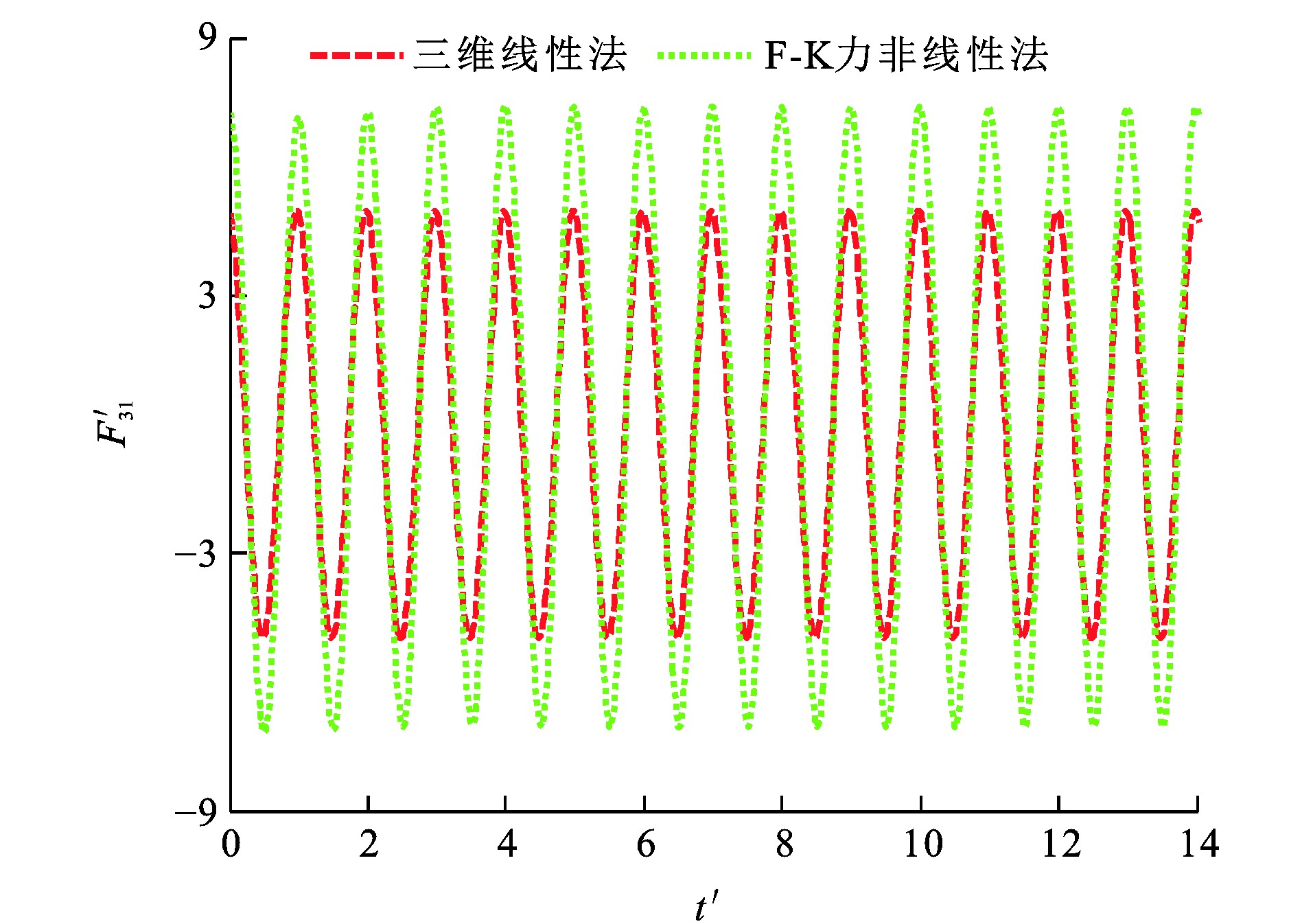
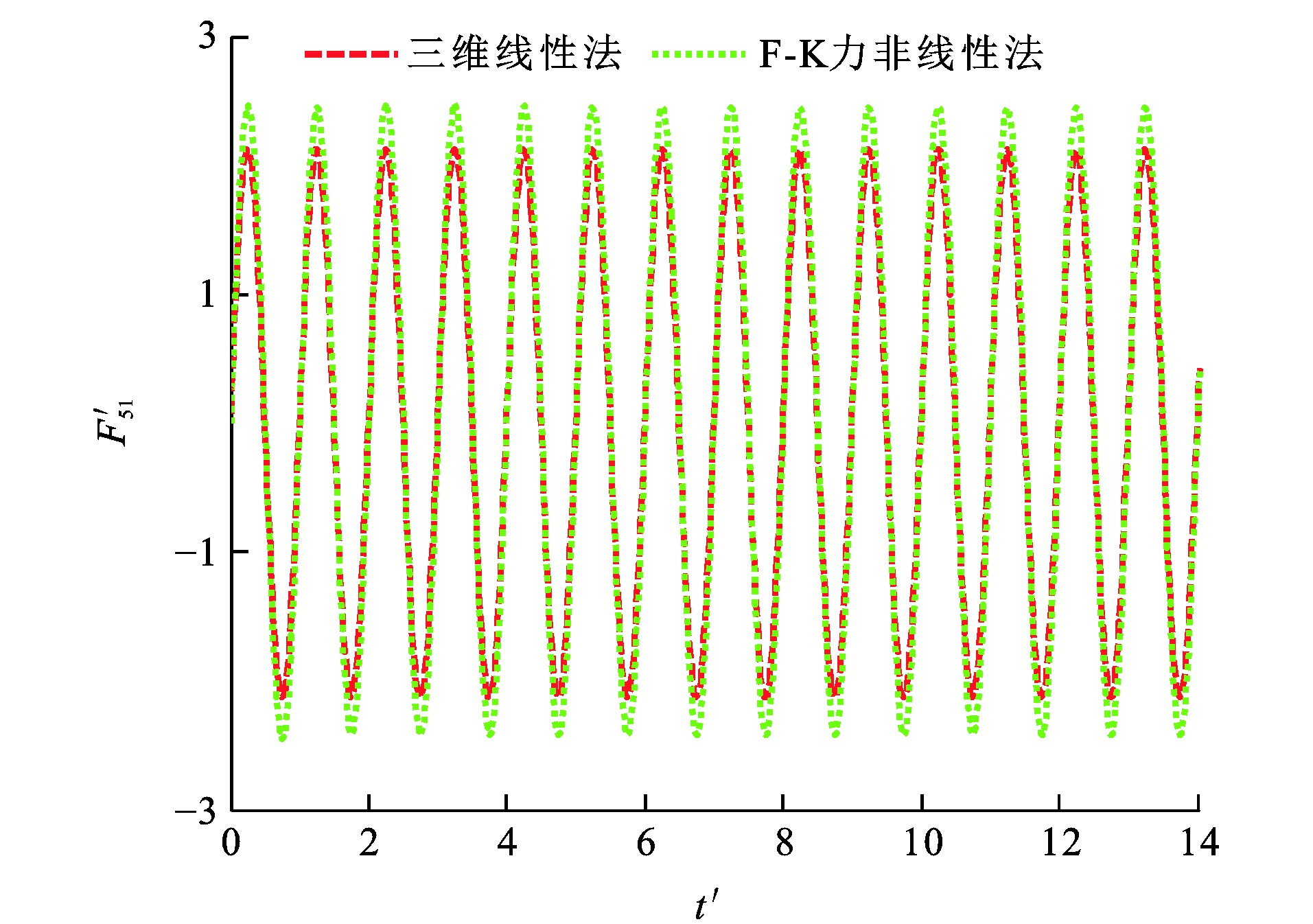
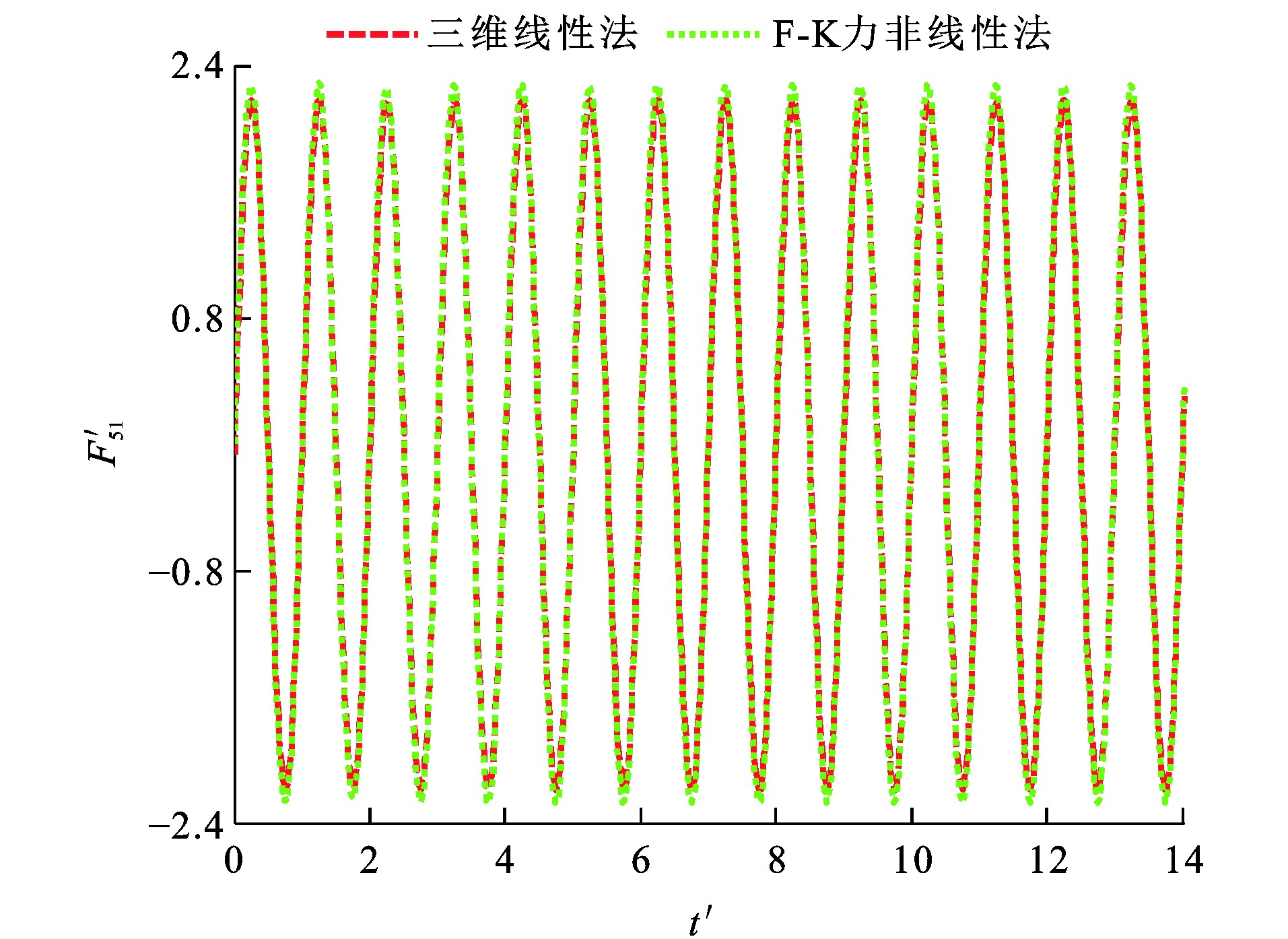
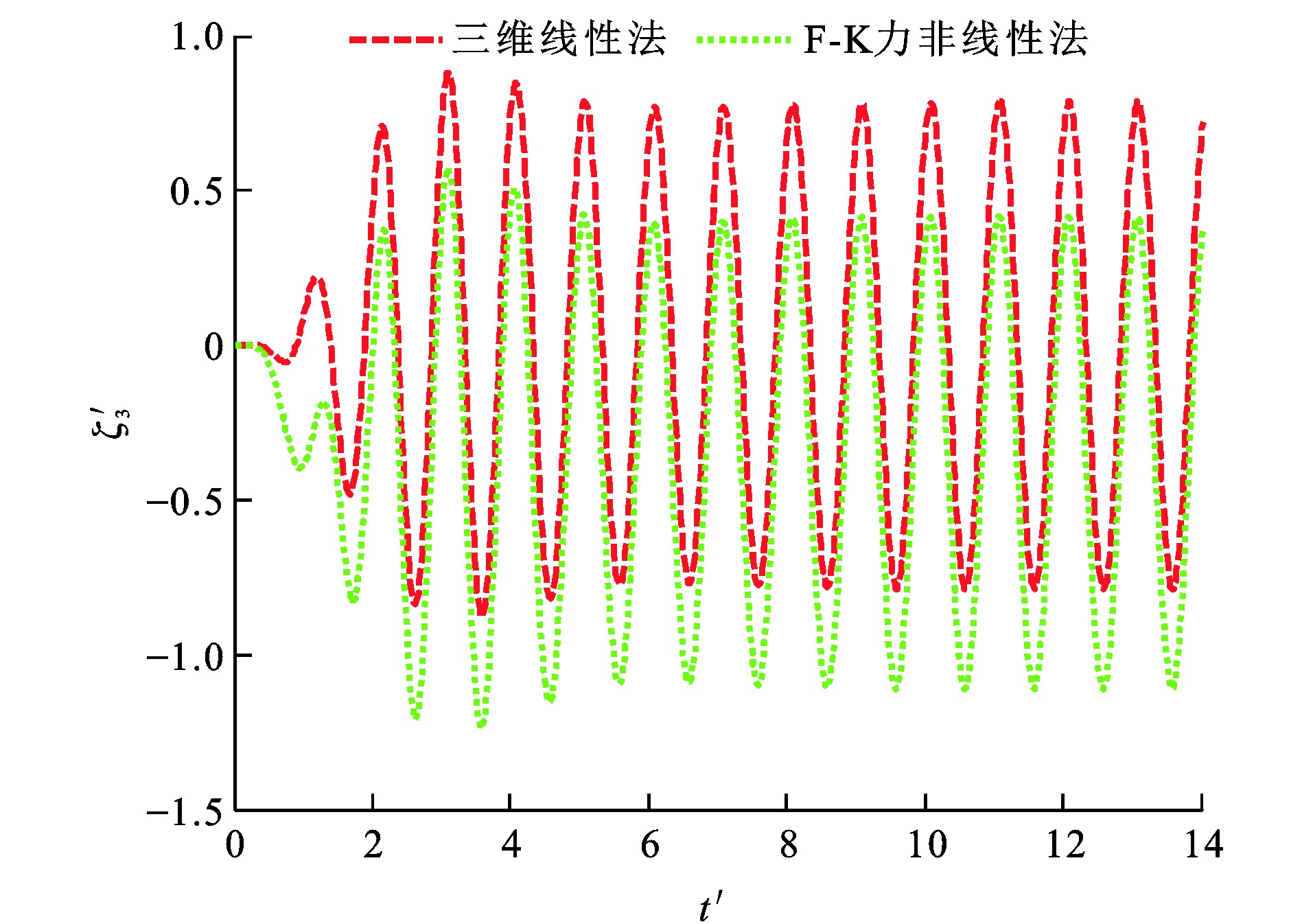
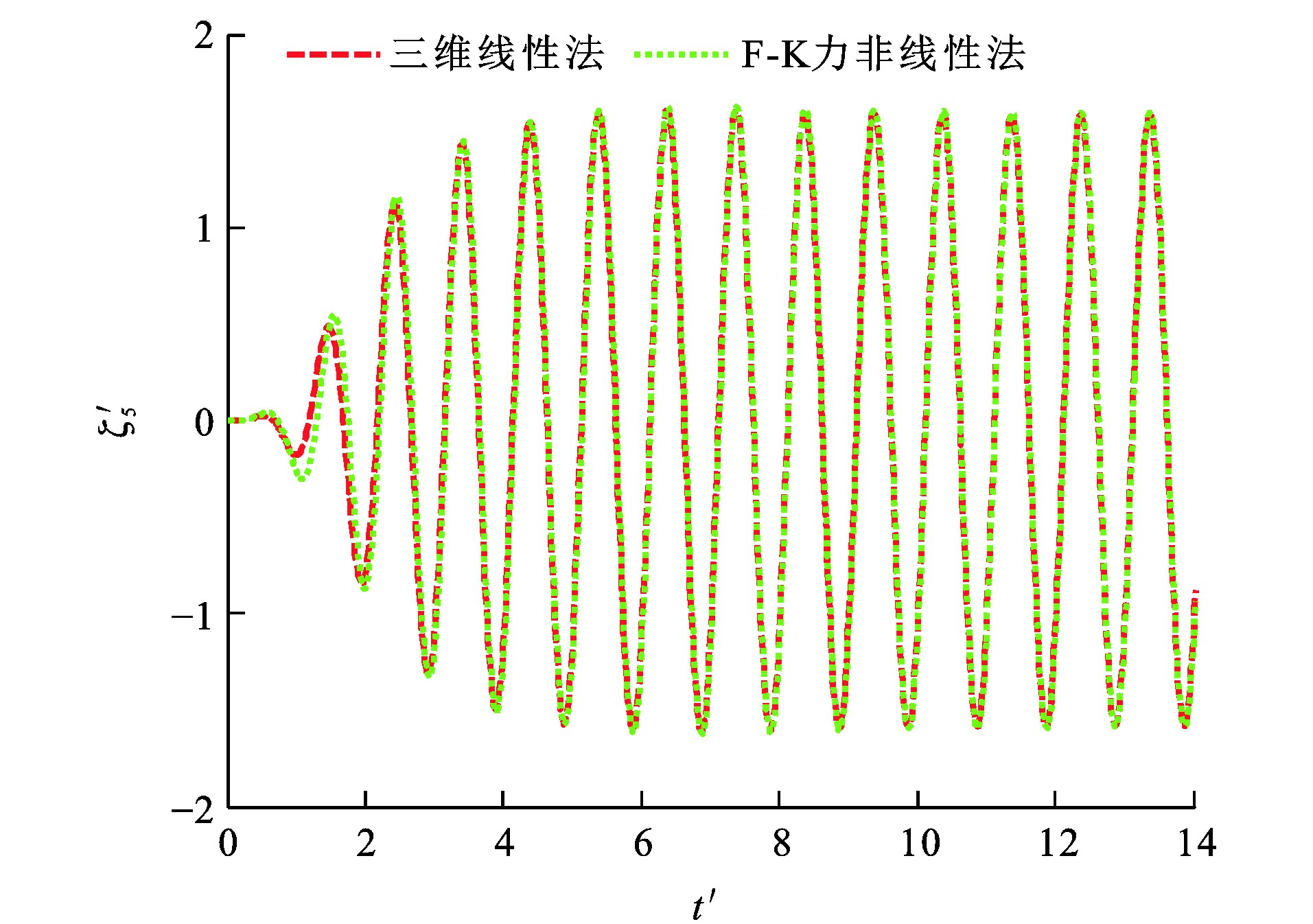
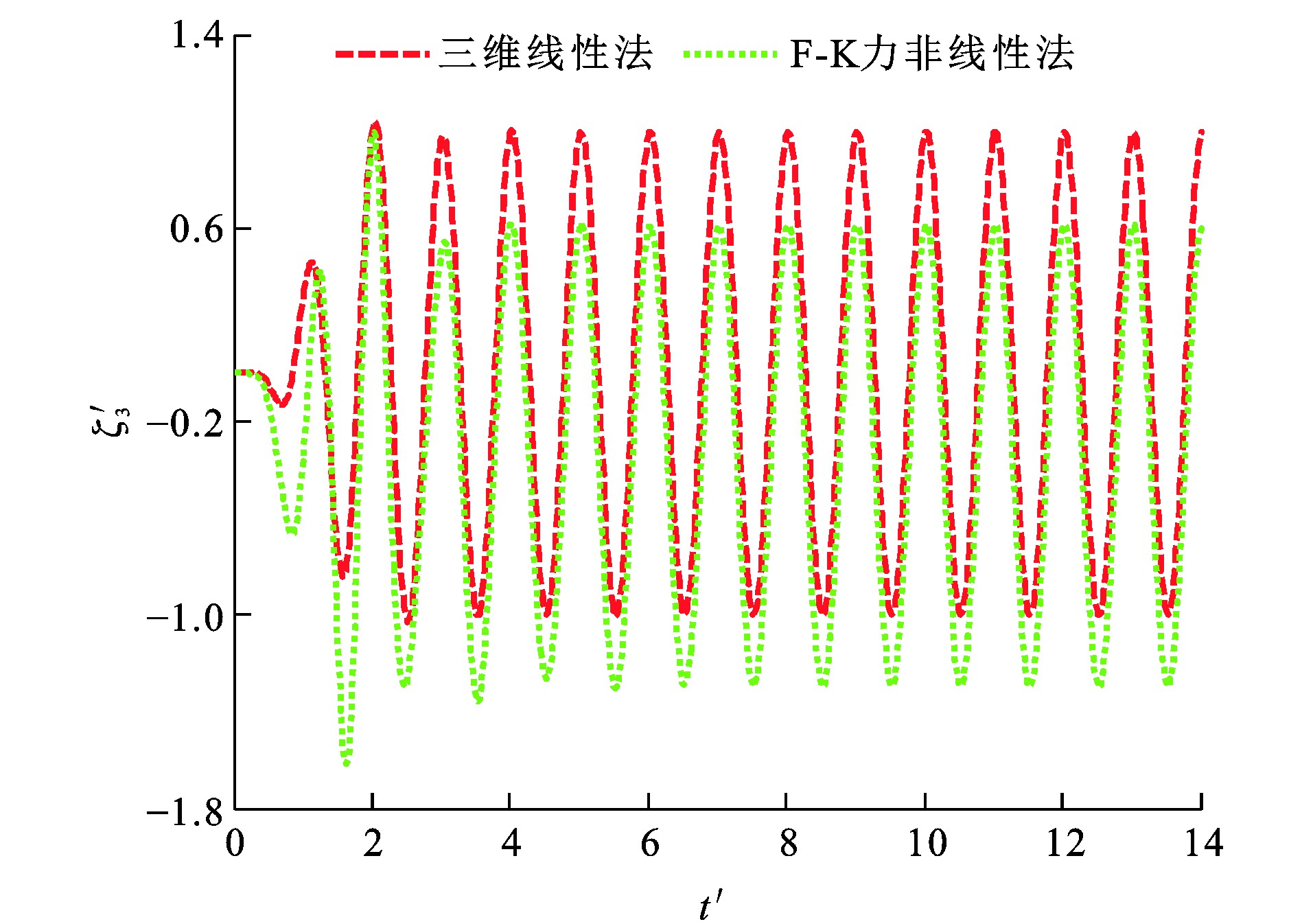
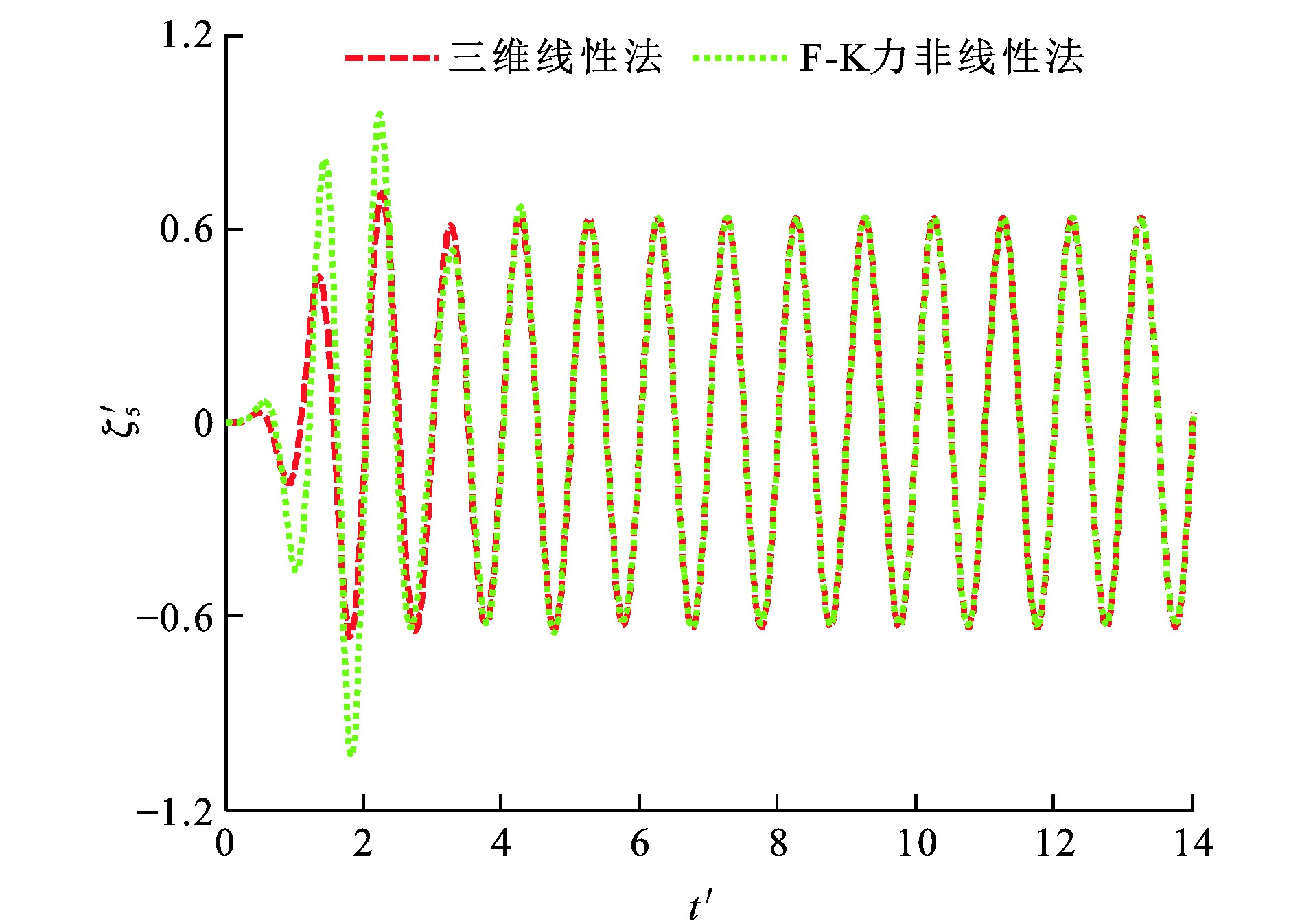
基于傅汝德-克雷洛夫力非线性法的规则波浪中船舶运动数学模型
张腾
,
任俊生
,
梅天龙
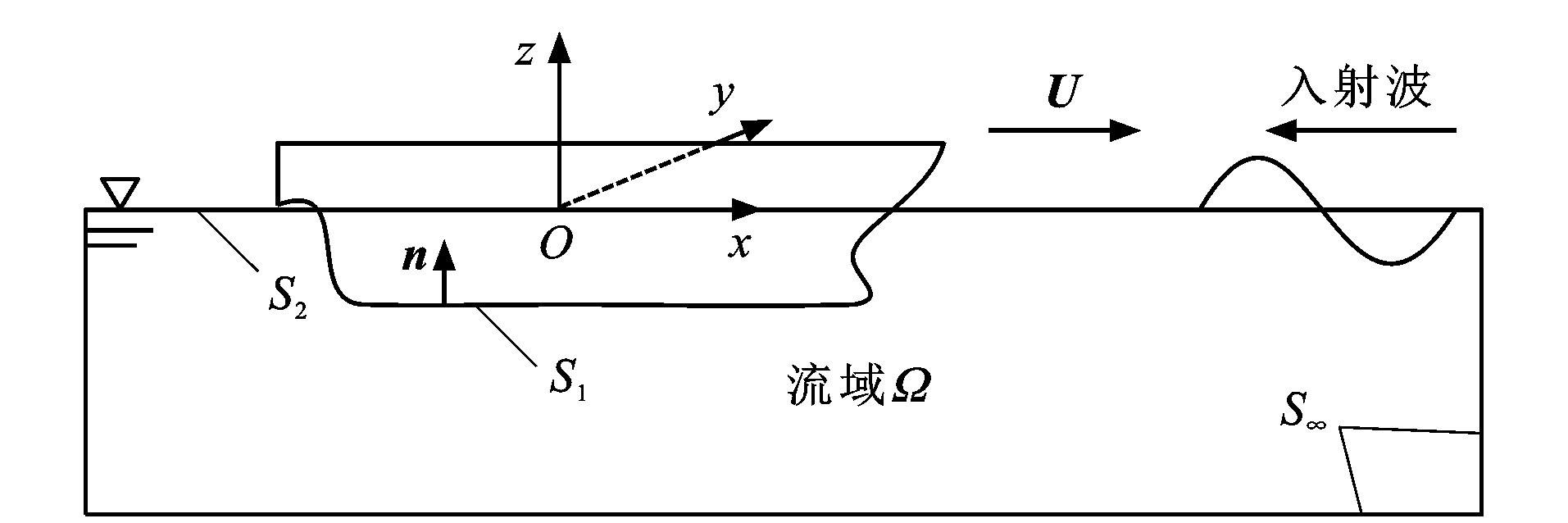
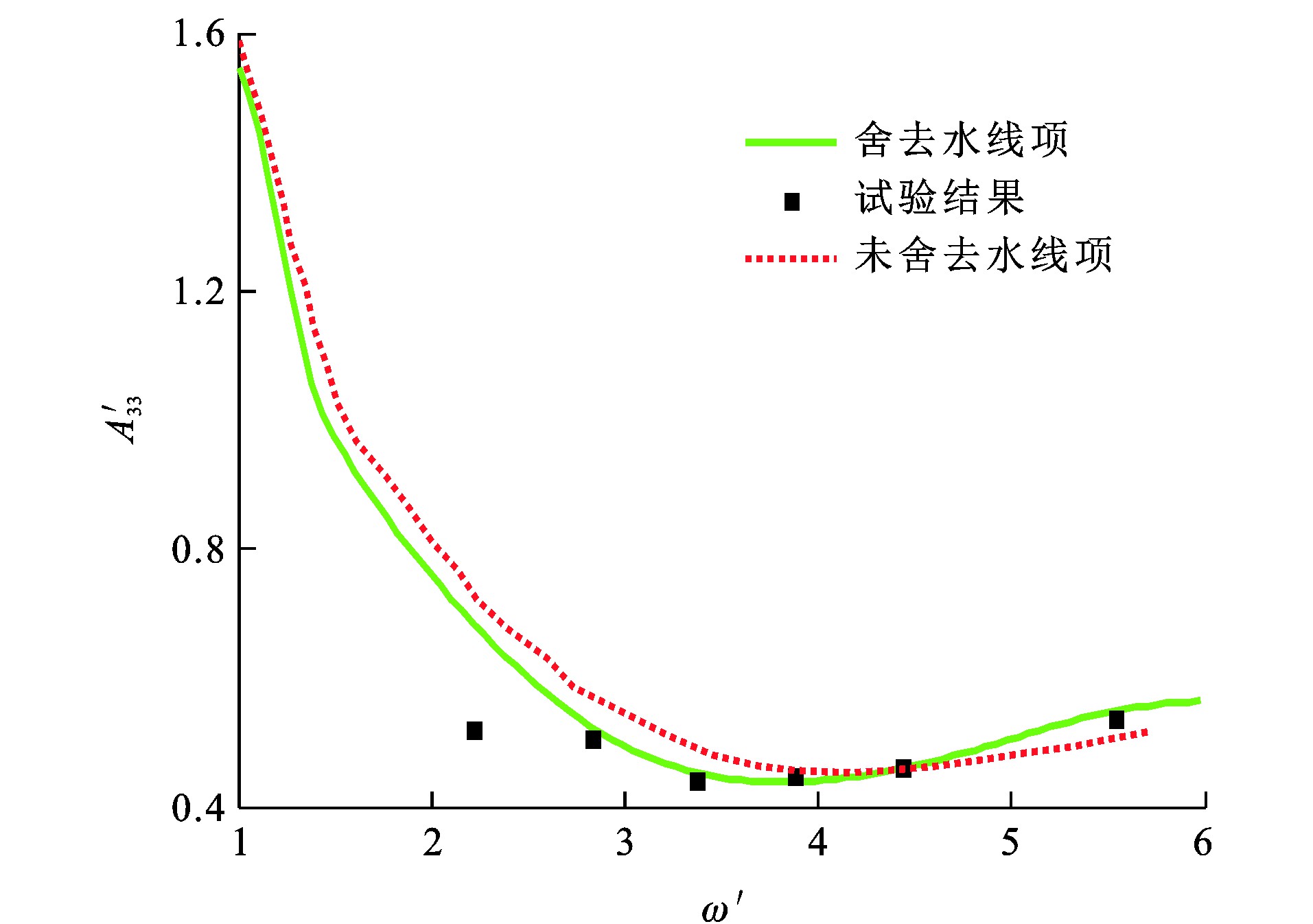
摘要:
为准确预报规则波浪中船舶的运动, 提出基于四叉树划分的自适应网格法, 以生成船舶瞬时湿表面, 在船舶瞬时湿表面上计算傅汝德-克雷洛夫(F-K)力与静恢复力; 对于与波面相交的面元, 由于F-K力在波面处剧烈波动, 采用四叉树划分法进一步细分面元; 基于线性理论, 采用瞬时自由面格林函数在船舶平均湿表面上计算扰动力; 为避免瞬时自由面格林函数在自由液面处剧烈波动产生严重数值误差, 舍去扰动势所满足边界积分方程中的水线项, 并对迎浪前进速度为傅汝德数0.2的WigleyⅠ型船舶进行数值计算。计算结果表明: 对低于瞬时波面以下的船体部分, F-K力非线性法所需面元数更少, 为细网格法的1/4~1/8;除不规则频率外, 舍去与未舍去水线项所得水动力系数与试验值的相对误差分别小于33.4%、54.8%, 因此, 舍去水线项所得水动力系数更接近试验结果; 当入射波波幅为0.018 m, 波长与船长比为1.25时, 采用F-K力非线性法与线性法所得纵摇幅值响应因子的计算结果分别比试验值低3.2%、17.0%, 波长与船长比为2.00时, 采用F-K力非线性法与线性法所得纵摇幅值响应因子的计算结果分别比试验值低6.7%、13.5%, 可见, 采用F-K力非线性法能够准确地仿真规则波浪中船舶的运动。
更多>
2020, 20(2): 77-87.
doi:
10.19818/j.cnki.1671-1637.2020.02.007
摘要
(
2826
)
HTML
(
694
)
PDF (2685KB)
(
493
)
引用
(
)
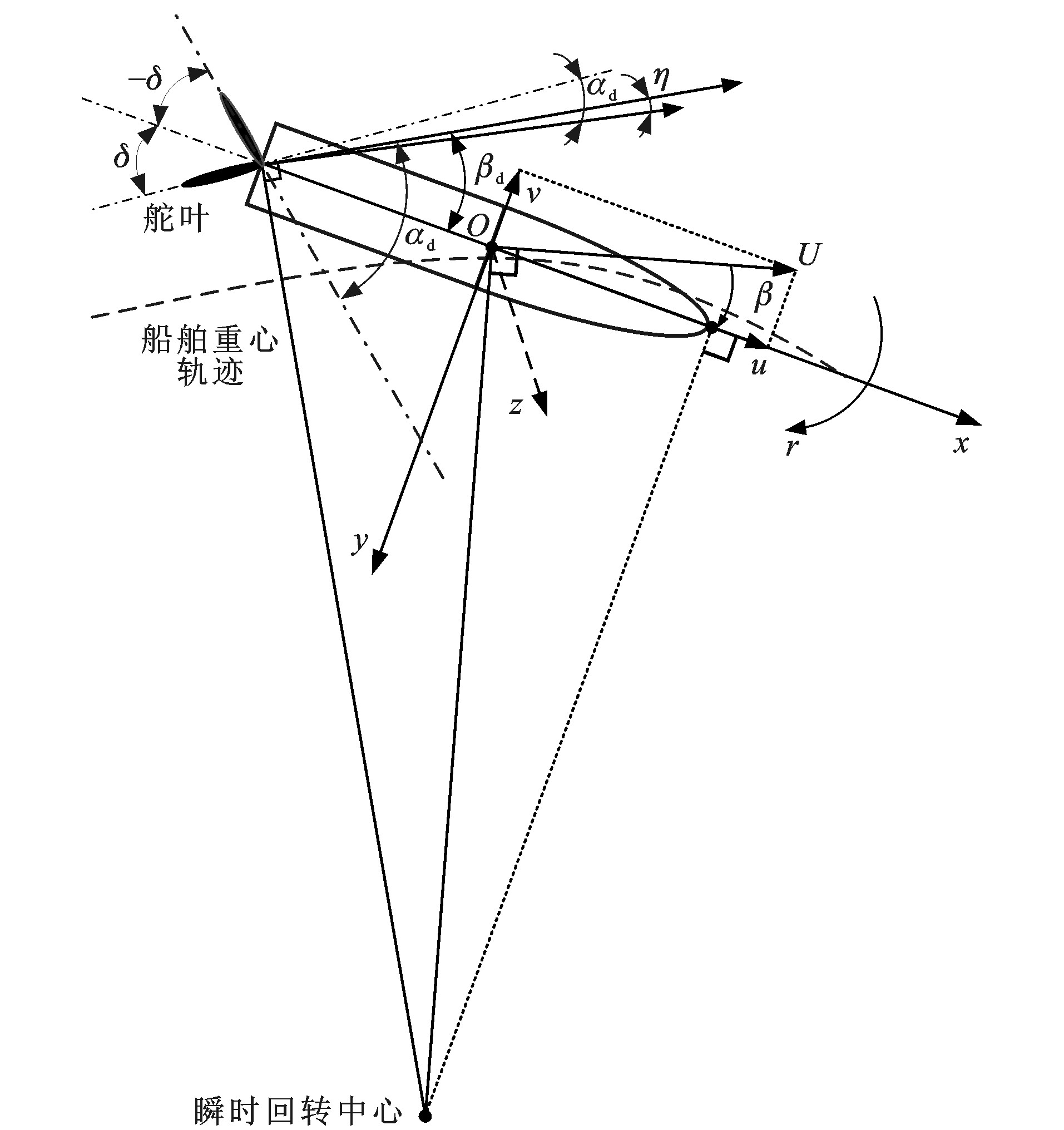
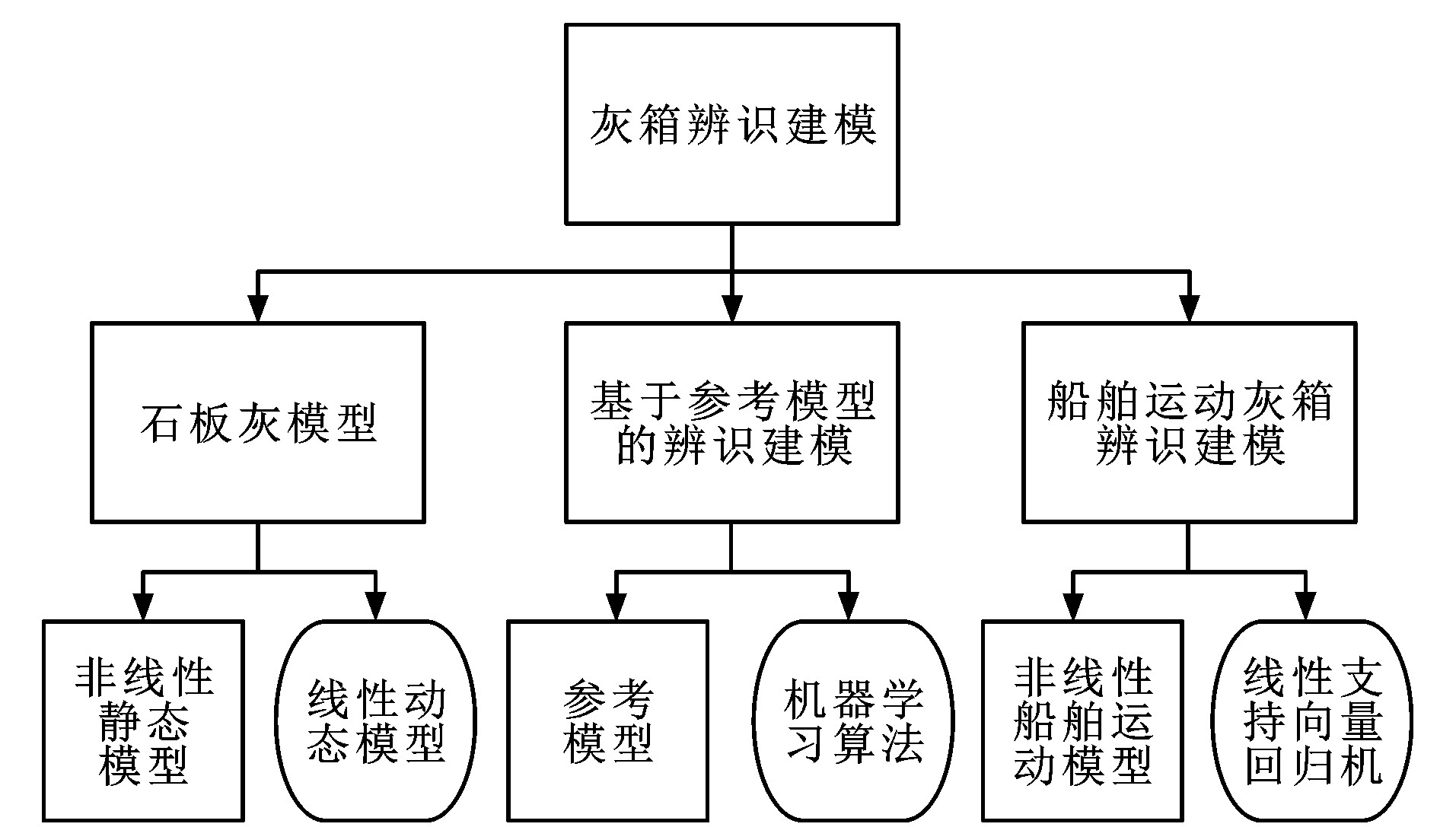
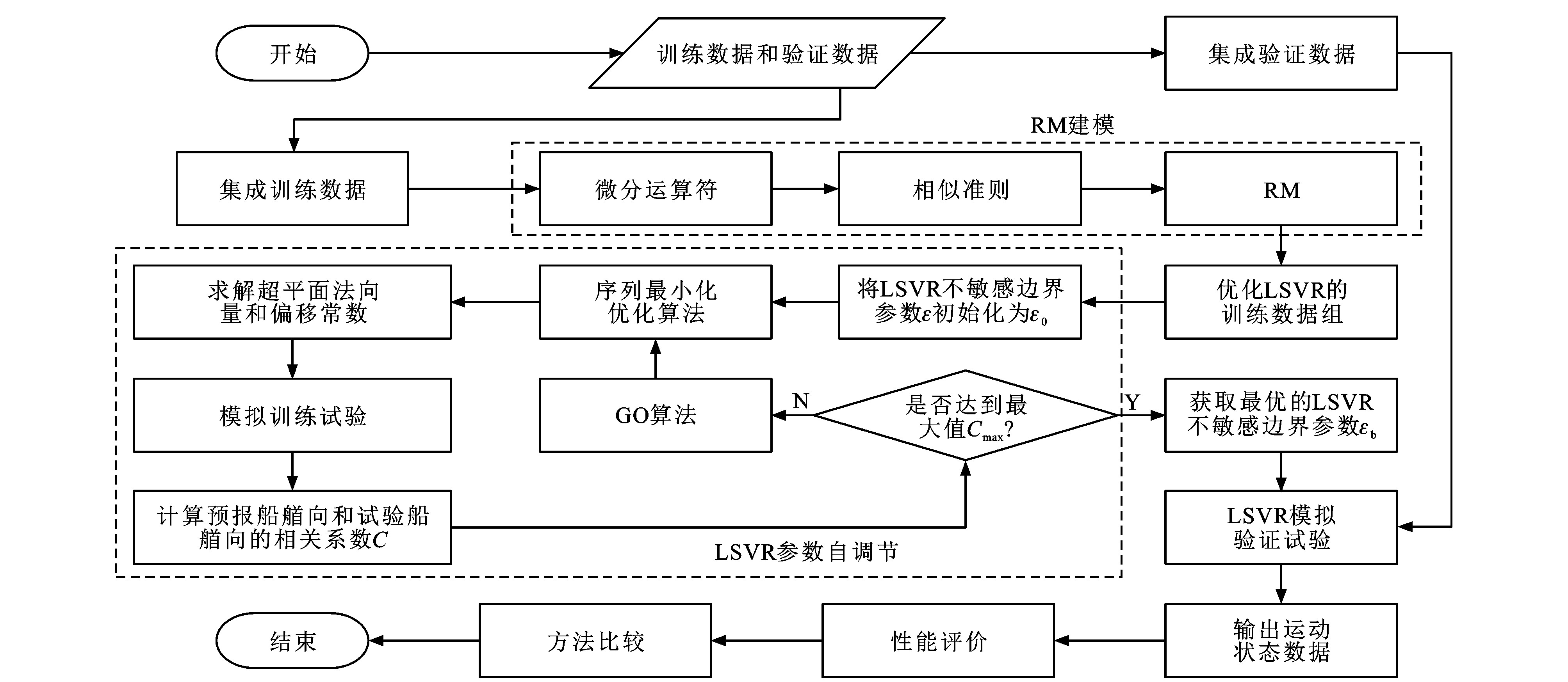
基于单参数自调节RM-GO-LSVR的船舶操纵灰箱辨识建模
梅斌
,
孙立成
,
史国友
,
马文耀
,
王伟
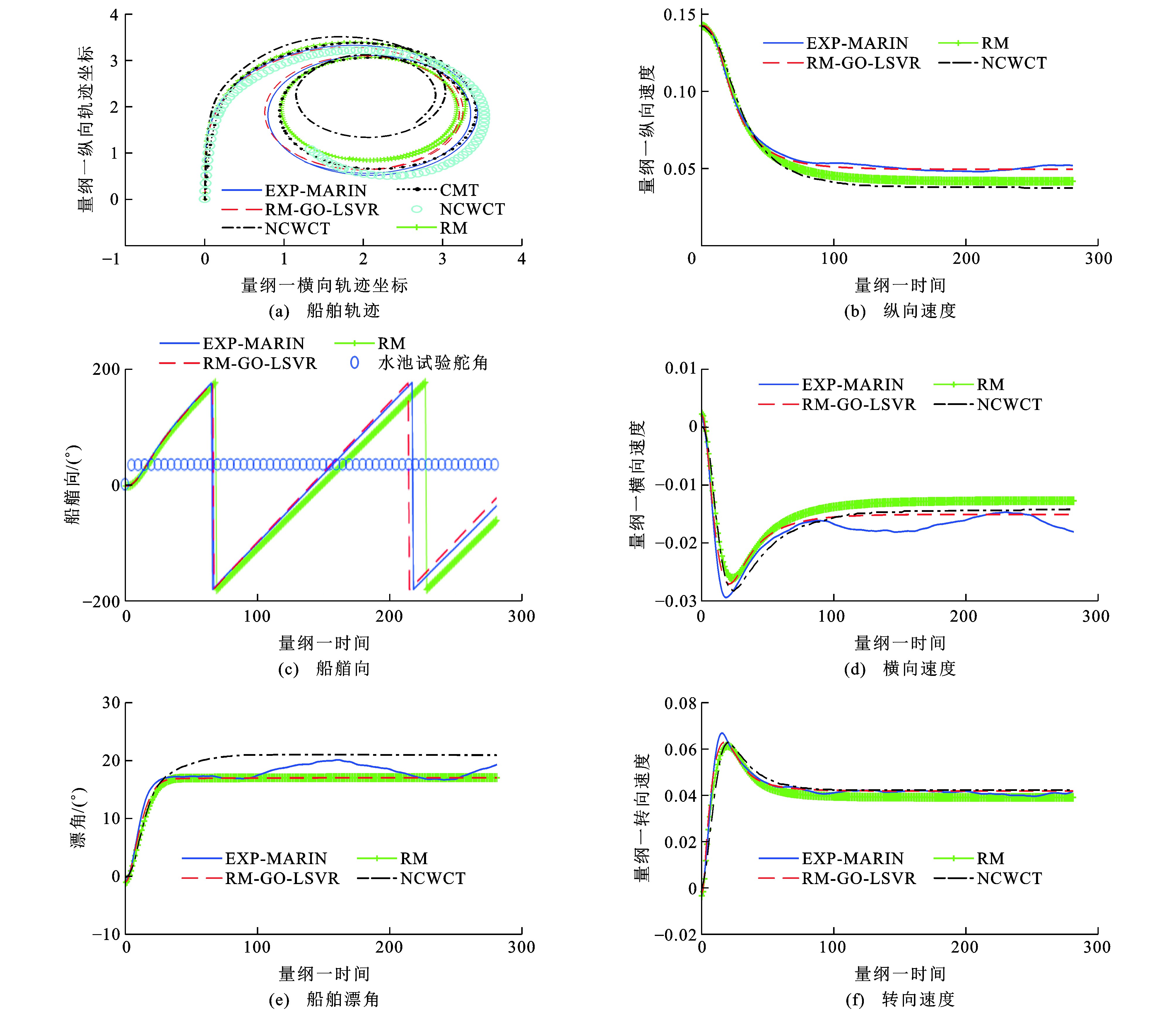
摘要:
为实现舵角小、试验数据少条件下船舶操纵辨识建模, 提出了一种船舶操纵运动灰箱模型; 搜集水动力系数已知的船舶运动数学模型作为备选参考模型(RM), 计算被辨识船舶与备选RM的相关系数, 并以此筛选合适的RM; 运用相似准则将观测数据映射到RM的输入值域, 建立被辨识船舶与RM的运动关联, 获得了RM的加速度项, 并使用线性支持向量回归(LSVR)机补偿被辨识船舶和RM加速度项间的误差; 分析了机理模型, 设计了合适的LSVR输入项, 使用全局优化(GO)算法自动调节了LSVR的不敏感边界参数; 基于自航模试验数据训练了灰箱模型, 并与约束模试验(CMT)结果和计算流体力学结果比较, 验证了灰箱模型的泛化能力和预报精度。研究结果表明: 在20°船艏向、20°舵角Z形试验预报中, 灰箱模型所得第一超越角精度至少比CMT、虚拟约束模试验(VCMT)和RM方法所得结果高1°, 灰箱模型所得第二超越角精度至少比CMT和VCMT所得结果高0.4°; 在35°舵角旋回试验预报中, 灰箱模型所得进距精度至少比CMT、VCMT、数值循环水槽试验(NCWCT)和RM方法所得结果高1%, 灰箱模型所得战术直径精度比CMT所得结果低4%, 比NCWCT所得结果高10%;RM方法有助于灰箱辨识建模, GO算法能够优化LSVR的不敏感边界参数, 建立的单参数自调节灰箱辩识建模方法能够实现小舵角、少数试验条件下的船舶操纵辨识建模。
更多>
2020, 20(2): 88-99.
doi:
10.19818/j.cnki.1671-1637.2020.02.008
摘要
(
1879
)
HTML
(
602
)
PDF (4389KB)
(
433
)
引用
(
)
交通运输规划与管理
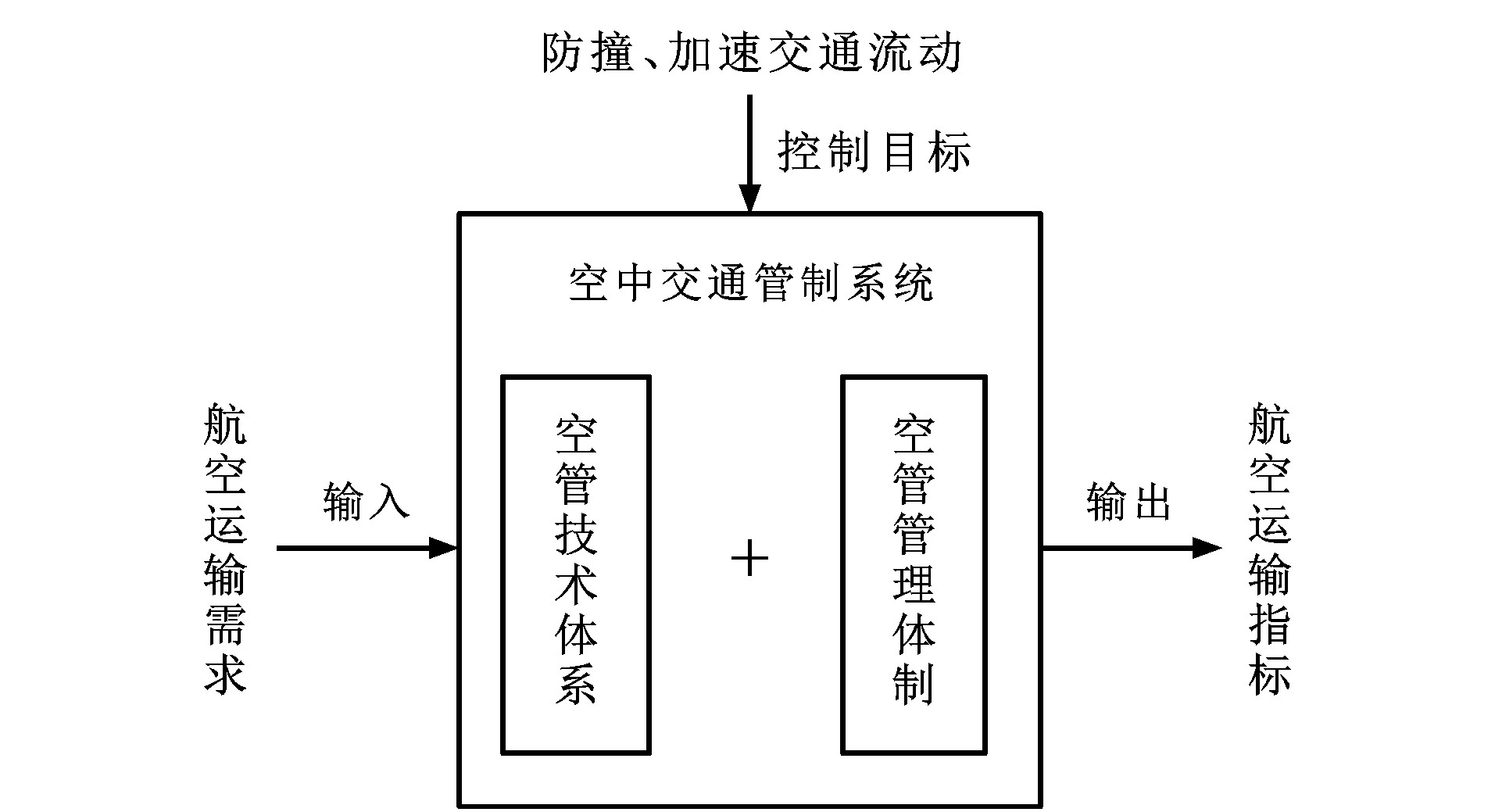
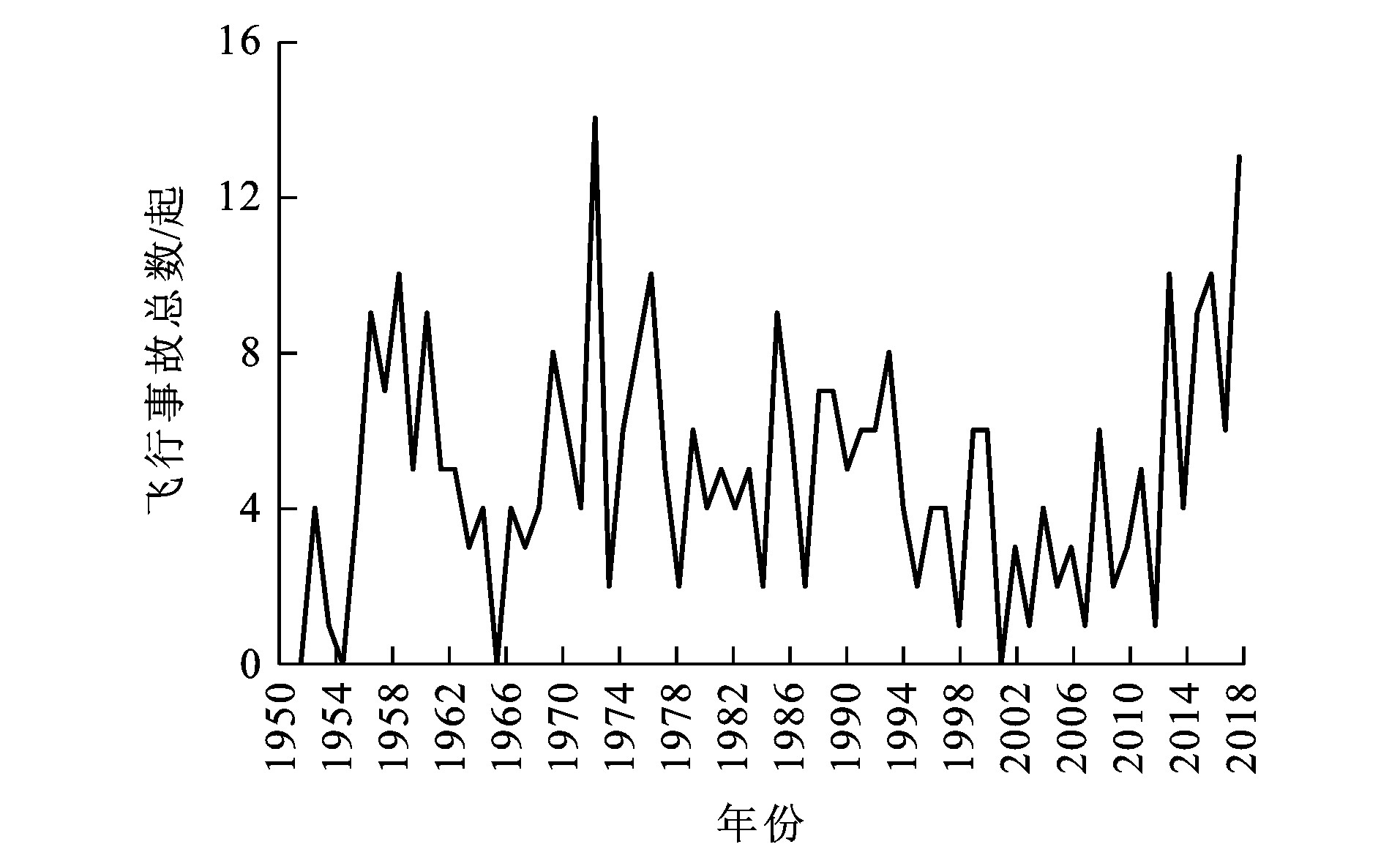
中国民航空中交通管制体制演化
赵嶷飞
,
肖瞳瞳
,
万俊强
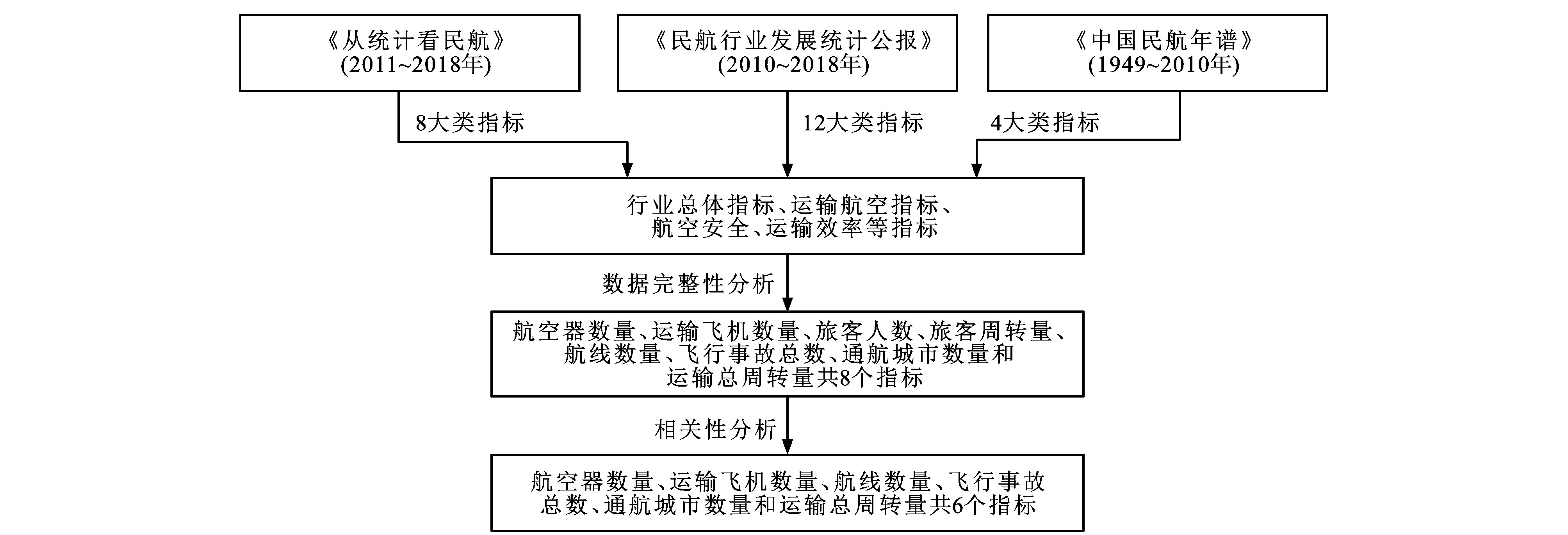
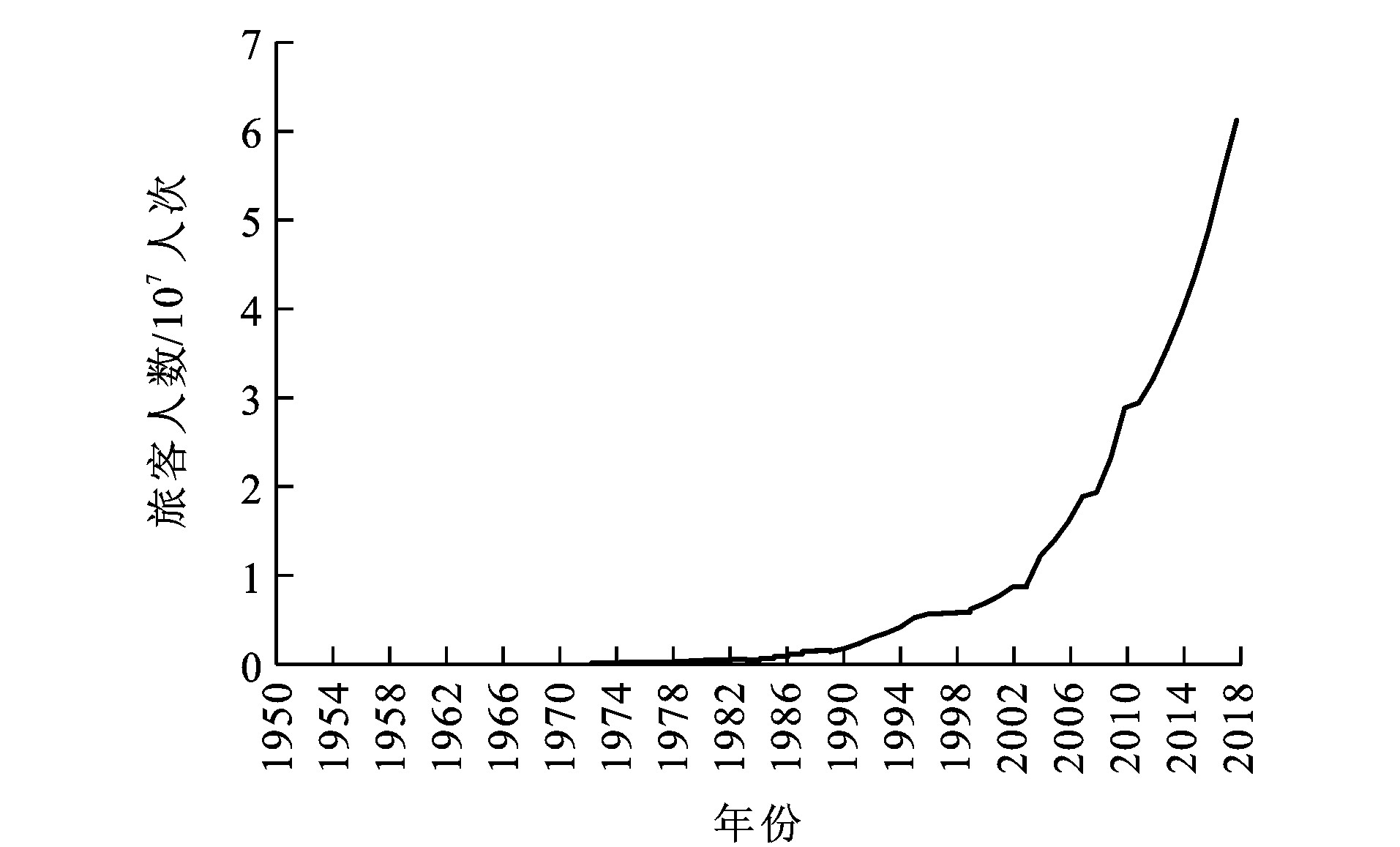
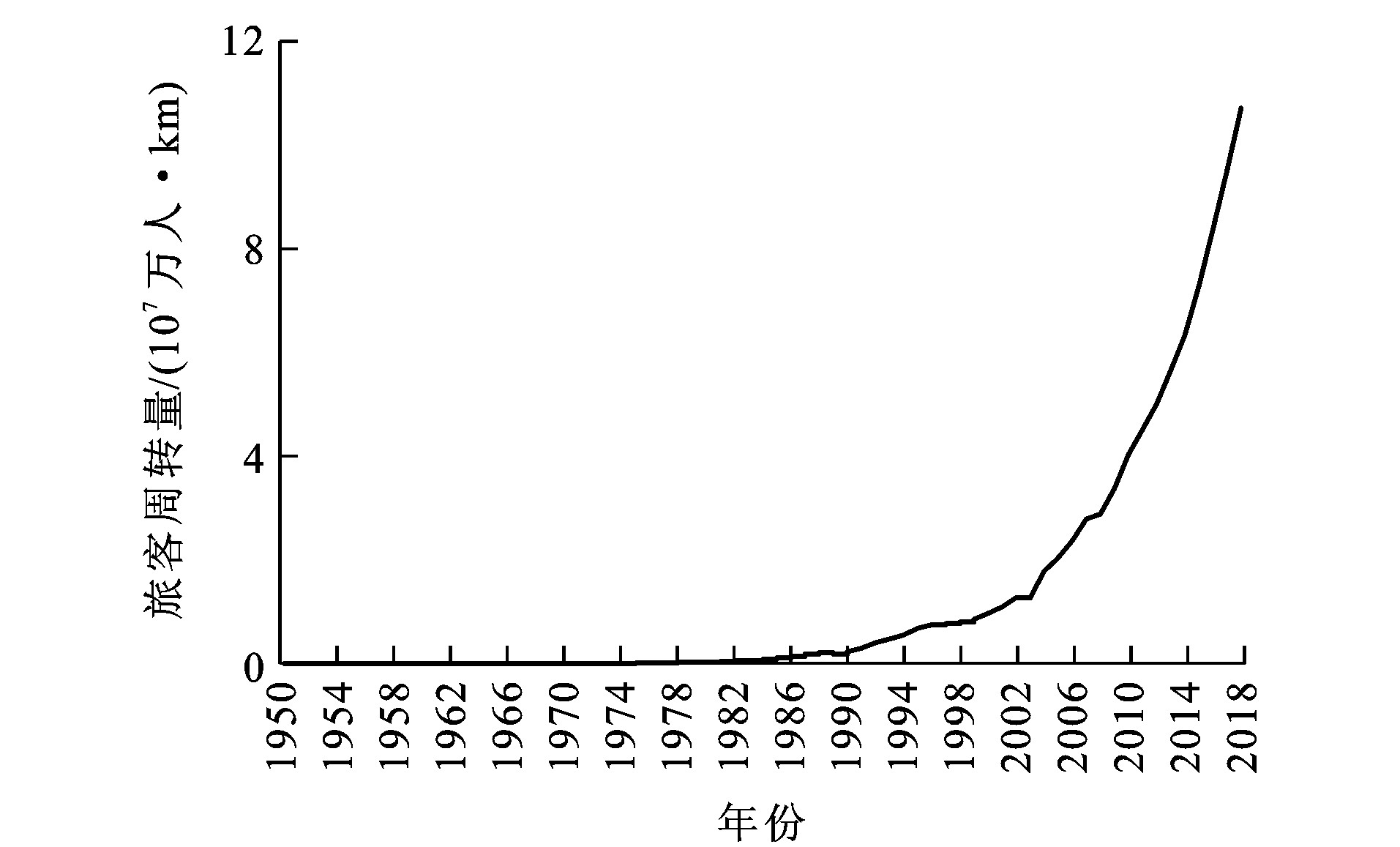
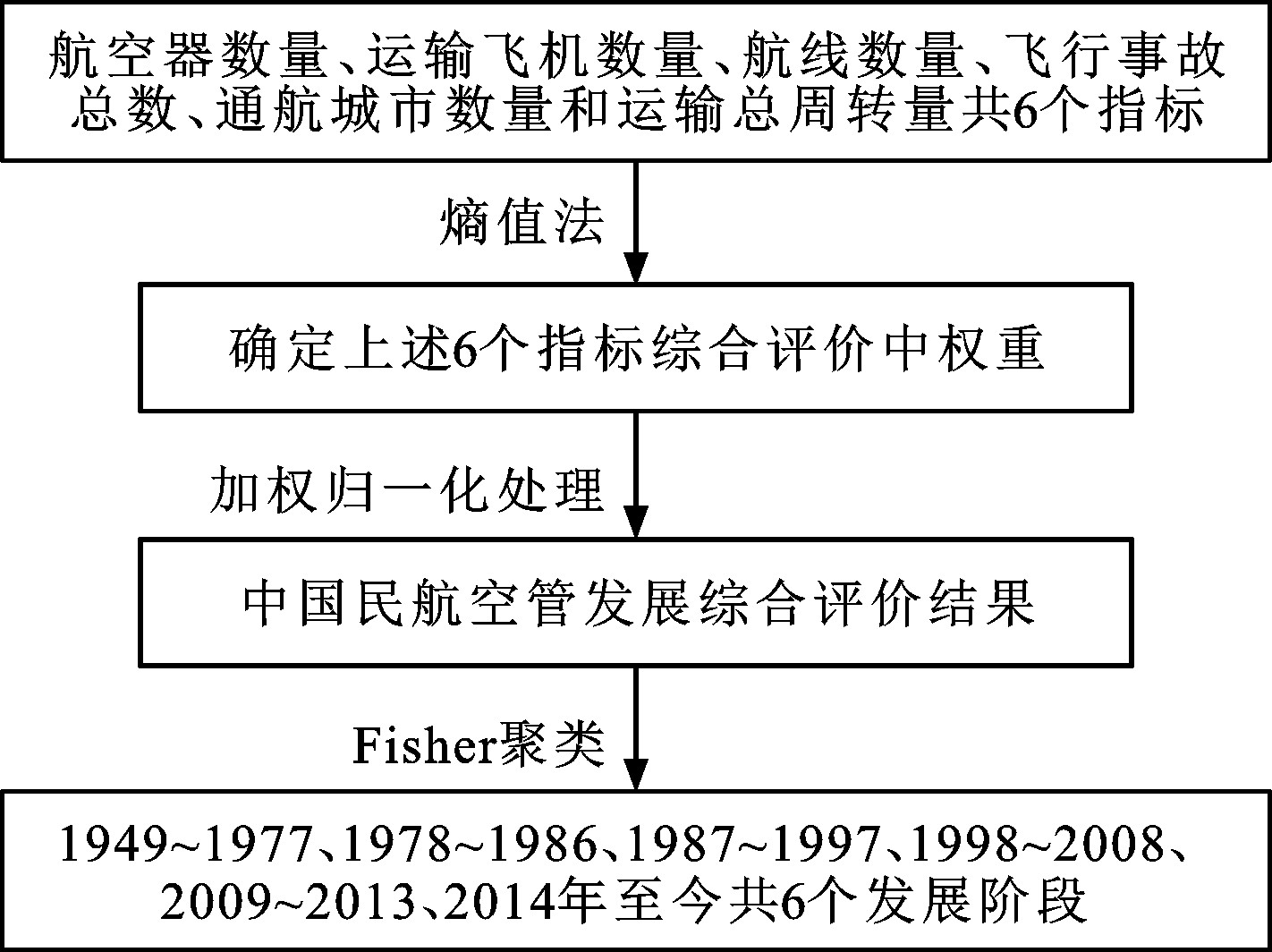
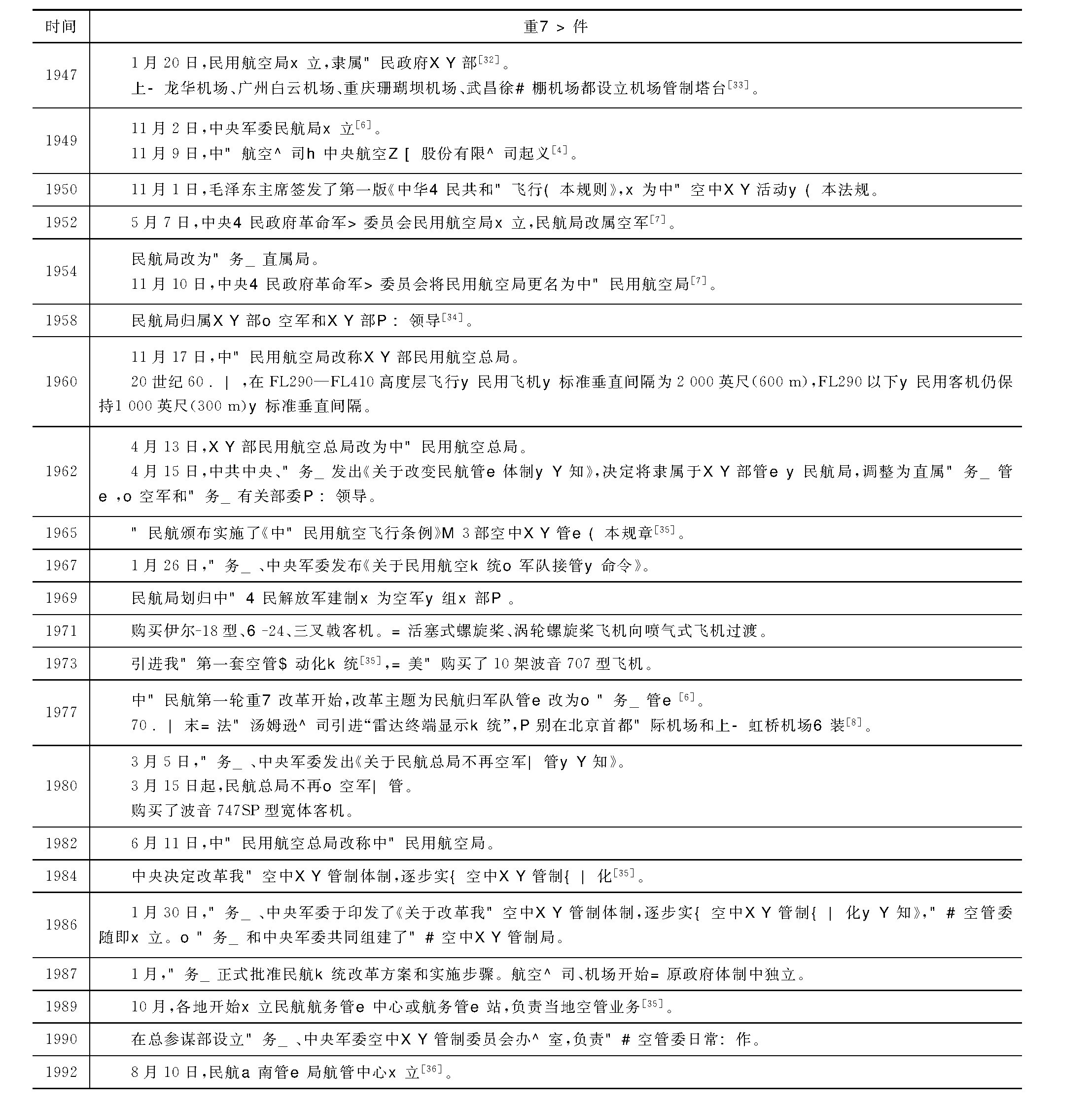
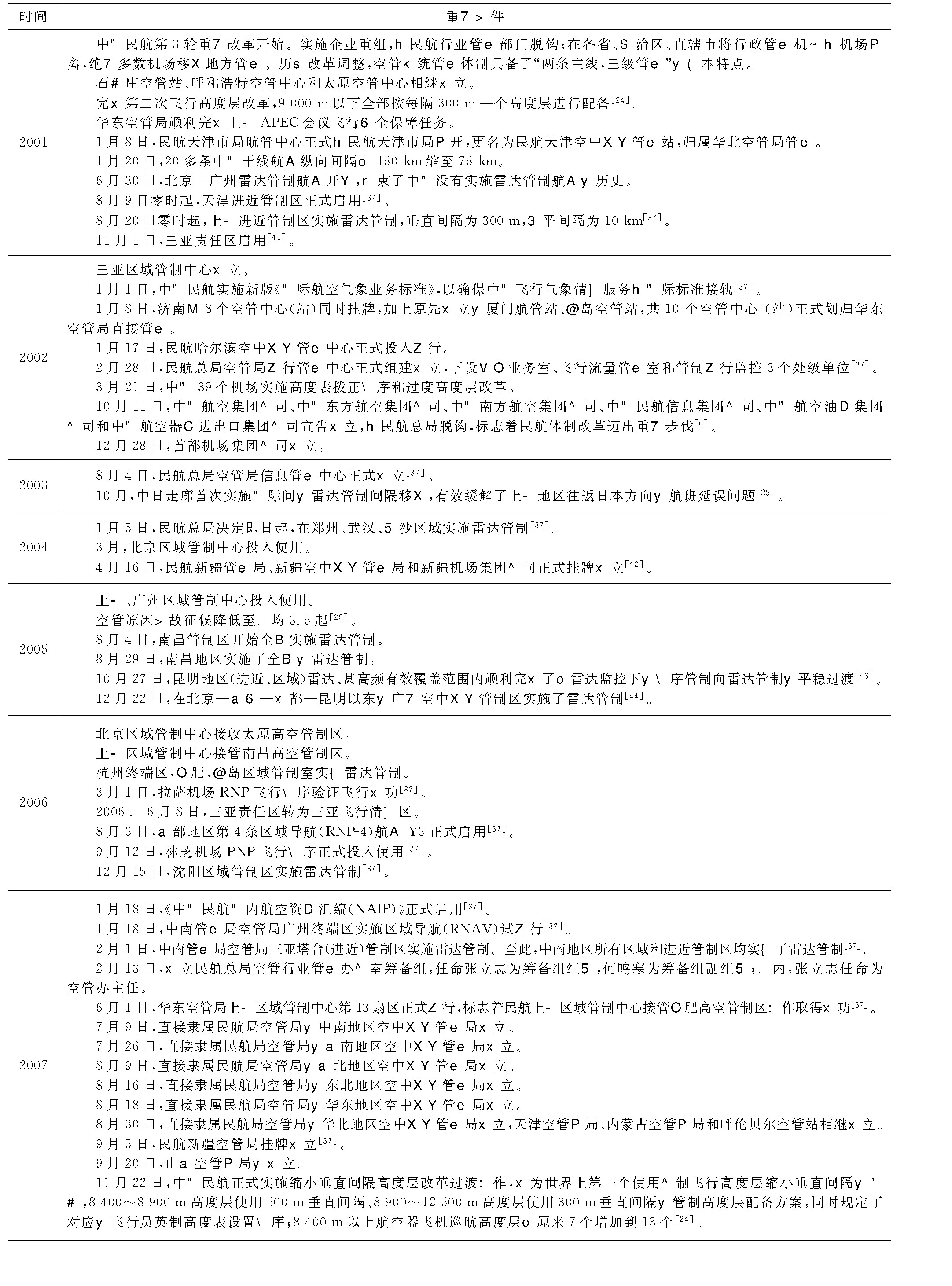
摘要:
为了研究中国民航空中交通管制(简称“空管”)发展演化特征, 建立了空管发展评价指标体系, 收集了航空器数量、运输飞机数量、旅客人数、旅客周转量、航线数量、通航城市、运输总周转量和飞行事故总数共8项指标1950~2018年的数据; 对指标进行了相关性检验后, 去除2项冗余指标, 对保留的6项指标进行标准化处理, 并用熵值法计算出各项指标的权重, 最终得到一组无量纲化的数据; 利用Fisher聚类算法分析了无量纲化数据, 得到断代的时间点, 将中国空管发展大致分为了6个阶段; 通过收集中国民航发展过程中的重大事件, 对定量分析得到的结果进行了调整。分析结果表明: 中国空管的发展可以分为7个阶段, 每一阶段都有其特有的发展特征; 通过7个阶段的发展和演化, 中国形成了军政共管国家空管体制, 即以中国民用航空局空中交通管理局为首的民航三级运行管理体制, 以中国民用航空局空管行业管理办公室为首的民航三级政府监管体制, 以及以ICAO标准为基础的民航空管技术体系; 民航空管的发展过程由管理体制和技术体系共同驱动, 应通过全新的管理体制和技术体系建立运行一体化的新一代空管系统, 提高系统的集约化程度, 并将避撞责任逐渐从地面管制员向航空器或飞行员转移。
更多>
2020, 20(2): 100-120.
doi:
10.19818/j.cnki.1671-1637.2020.02.009
摘要
(
4033
)
HTML
(
1067
)
PDF (2901KB)
(
870
)
引用
(
)
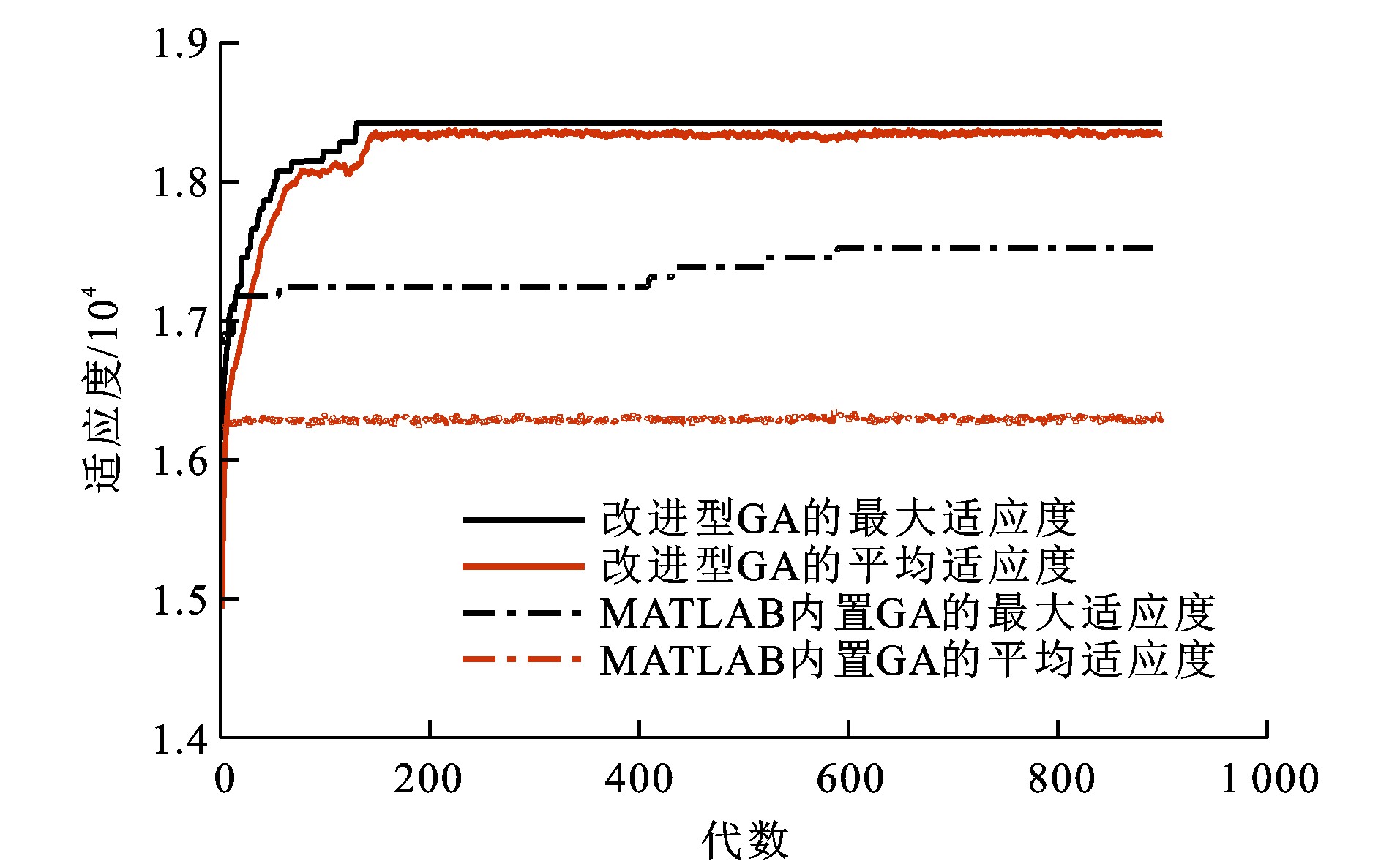
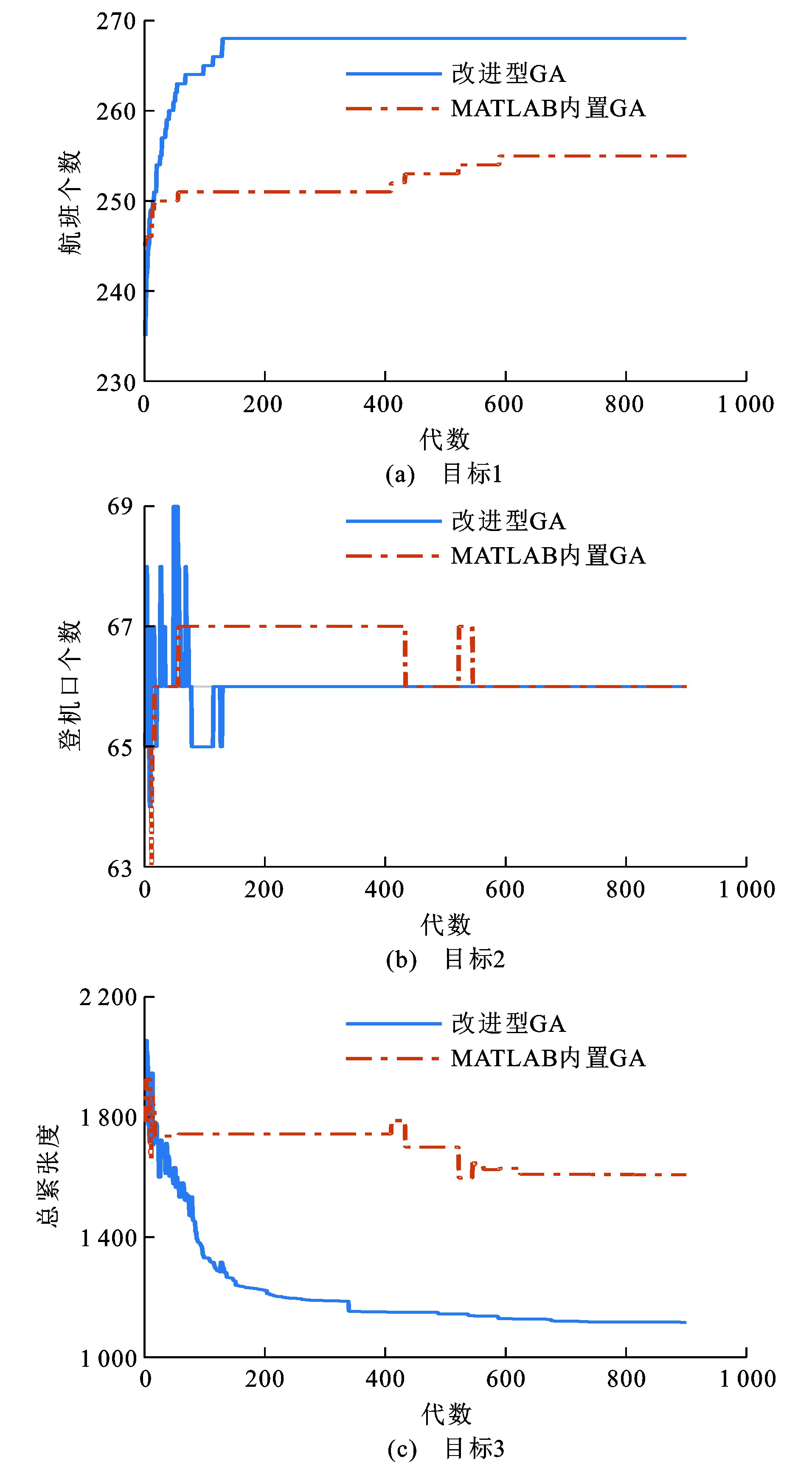
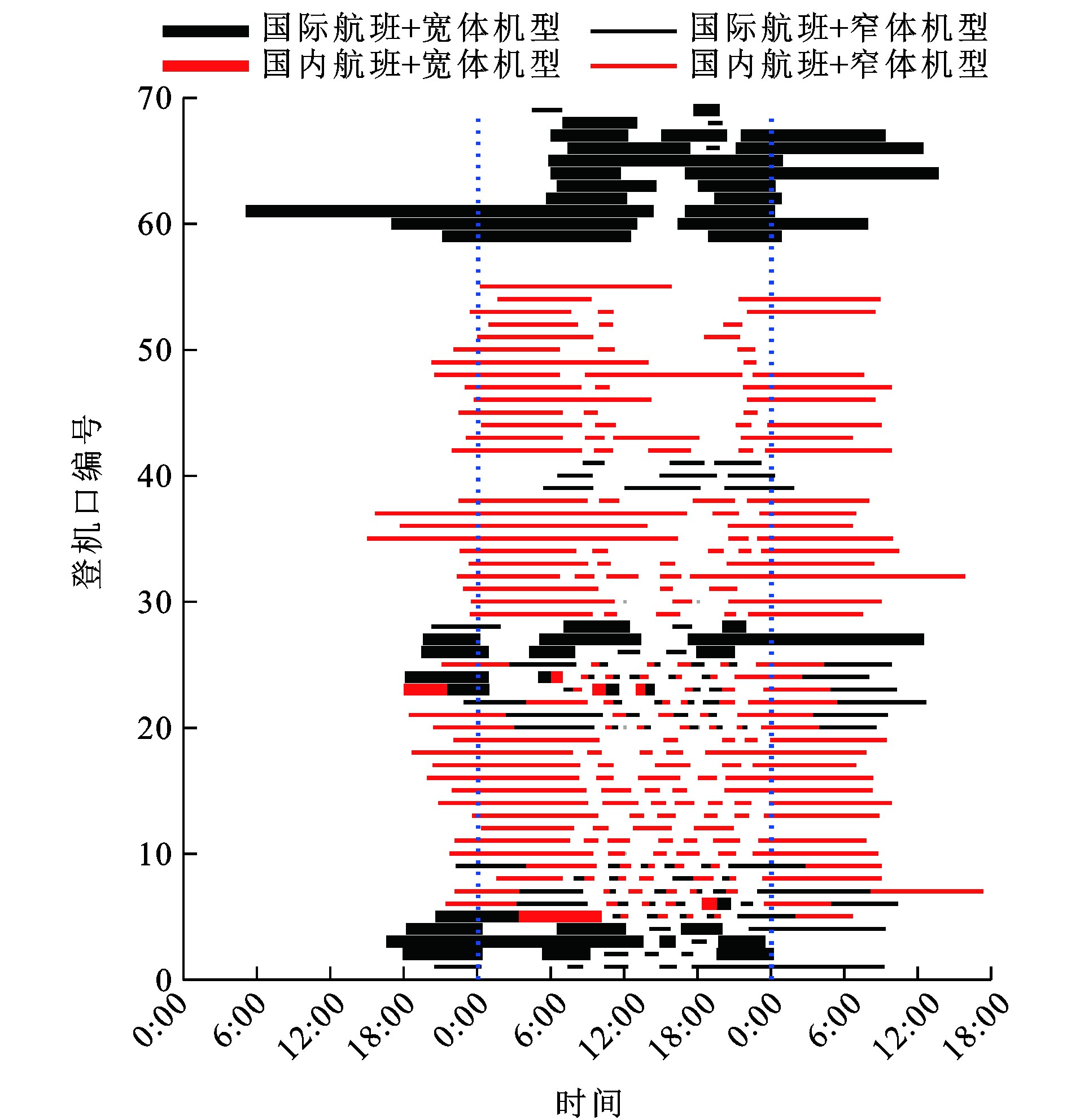
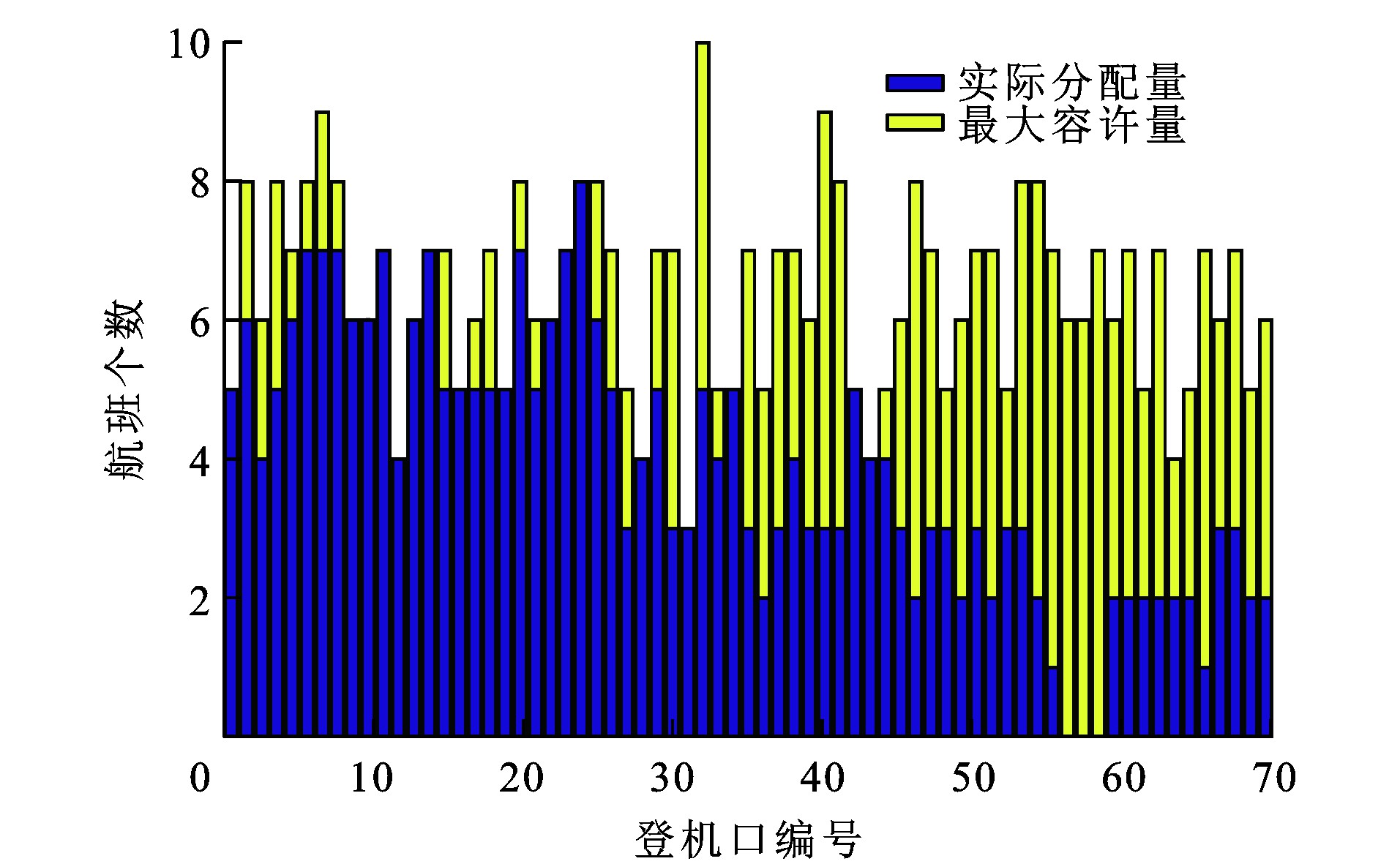
基于改进遗传算法的航班-登机口分配多目标优化
余朝军
,
江驹
,
徐海燕
,
朱平
摘要:
为提高现代机场的资源利用效率和乘客换乘体验, 研究了多目标航班-登机口分配问题; 在考虑航班类型约束、飞机机体类型约束和转场时间间隔约束的基础上, 以分配在固定登机口的航班数量最多、使用的固定登机口数量最少和乘客换乘紧张度最小为目标函数, 建立了航班-登机口分配的多目标非线性0-1整数规划模型, 并设计了一种改进型基因编码的遗传算法以提高求解效率; 基因个体采用两段式整数编码, 设计了该编码方式到可行解的映射流程, 同时从理论上证明该编码方式可以映射到最优解; 对两段基因编码分别设计了不同的交叉算子和变异算子, 避免产生非可行个体; 为验证算法的有效性, 基于某大规模机场的实际运营数据, 对比了改进型遗传算法与MATLAB内置遗传算法。计算结果表明: 采用改进型遗传算法使得安排在固定登机口的航班数目增大5%, 乘客换乘总紧张度减小3%, 乘客换乘平均紧张度减小32%, 占用的固定登机口数量相同, 安排在固定登机口的乘客数量增大20%, 算法运行时间减小8%, 说明改进型遗传算法性能更好, 可提高登机口的利用效率和乘客的换乘舒适度; 在改进型遗传算法的优化过程中, 航班数量目标和登机口数量目标在130次迭代时寻到最优解, 换乘紧张度目标在400次迭后基本收敛, 且最优结果对应的航班时序合理, 说明该算法的迭代收敛速度快, 优化结果合理。
更多>
2020, 20(2): 121-130.
doi:
10.19818/j.cnki.1671-1637.2020.02.010
摘要
(
3876
)
HTML
(
1292
)
PDF (2417KB)
(
612
)
引用
(
)
交通信息工程及控制
自动驾驶公众接受度研究综述
唐立
,
卿三东
,
徐志刚
,
周厚庆
摘要:
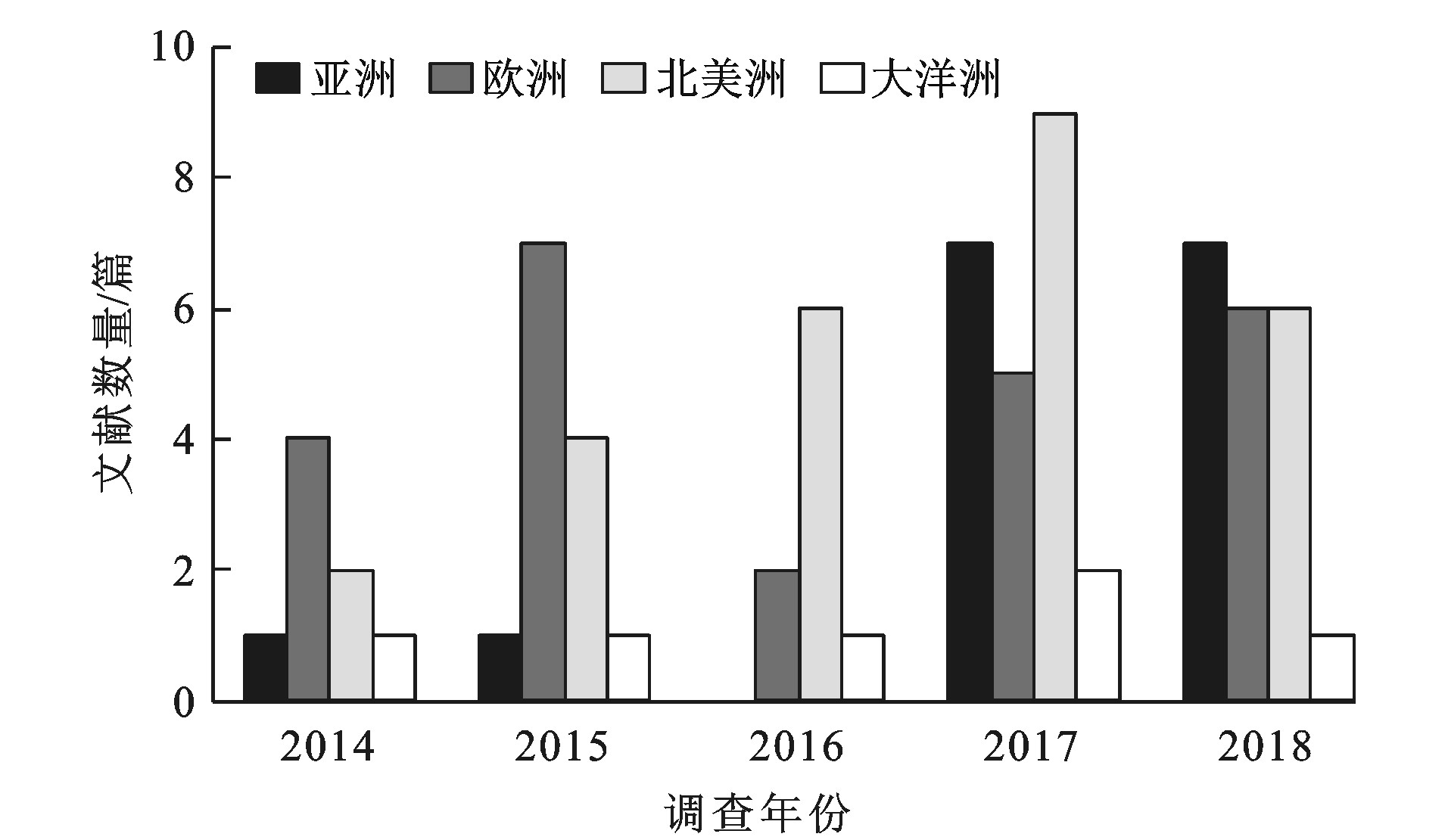
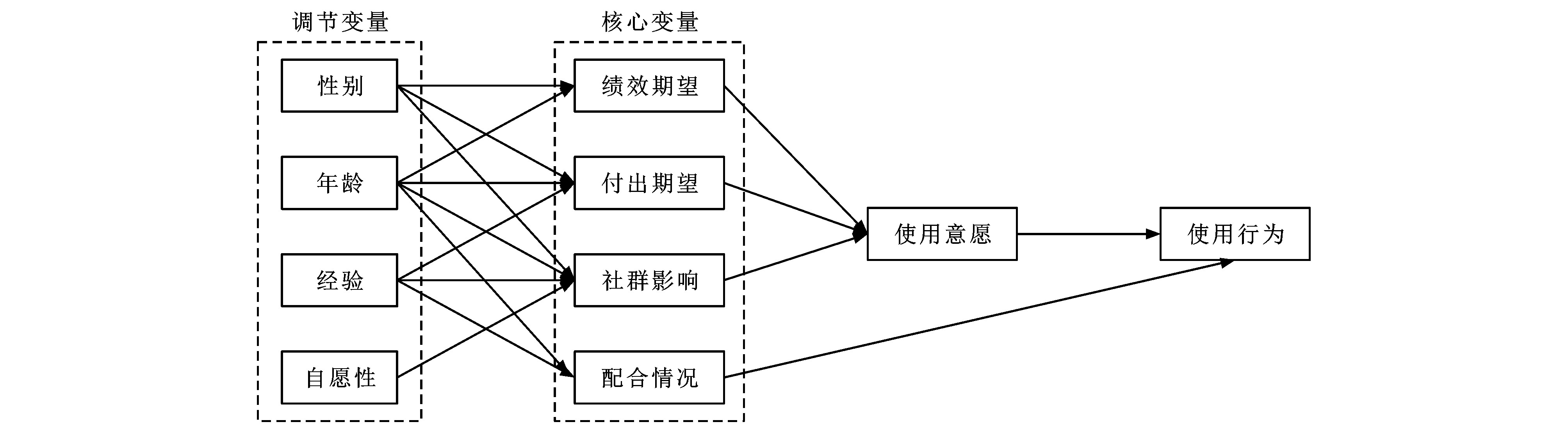
全面梳理并总结了自动驾驶公众接受度领域的相关研究, 从接受自动驾驶的可能性与态度、了解与信任程度、感知与关注点、支付意愿和使用偏好5个方面定义并阐述了接受度的内涵; 从调查对象的选取、问卷设计、调查方式与抽样、模型构建与数据分析方法等方面对比了现有研究采用的数据采集和分析方法; 总结了影响自动驾驶公众接受度的关键因素, 剖析了其对公众接受度的影响, 指出了存在的问题和未来研究方向。研究结果表明: 现有大部分研究重点关注接受自动驾驶的可能性、态度和使用偏好等问题, 对支付意愿的研究相对较少; 公众对自动驾驶普遍持积极态度, 对自动驾驶技术及其相关功能有所了解; 安全问题是人们对自动驾驶的首要关注点, 不同群体对该问题的担忧程度有显著差异; 人们为享受自动驾驶技术而愿意支付额外费用的意愿不够强烈, 来自发达国家受访者的支付意愿普遍低于发展中国家受访者; 个人心理和生理属性, 社会人口属性, 伦理、法律责任和车辆安全水平, 车辆自动化水平及相关属性, 出行相关属性以及环境因素等是影响公众对自动驾驶接受度的几类关键因素; 然而, 现有研究对伦理和法律责任等因素的量化分析还较为缺乏, 性别、年龄和收入水平等部分关键因素的影响仍存在争议, 还需进一步讨论; 相关研究在对样本的代表性分析、问卷和调查方案的精细化设计以及关键因素的具体作用机制分析等方面还有待进一步深入。
更多>
2020, 20(2): 131-146.
doi:
10.19818/j.cnki.1671-1637.2020.02.011
摘要
(
7017
)
HTML
(
1496
)
PDF (2630KB)
(
1176
)
引用
(
)
基于轨迹预瞄的智能汽车变道动态轨迹规划与跟踪控制
聂枝根
,
王万琼
,
赵伟强
,
黄震
,
宗长富
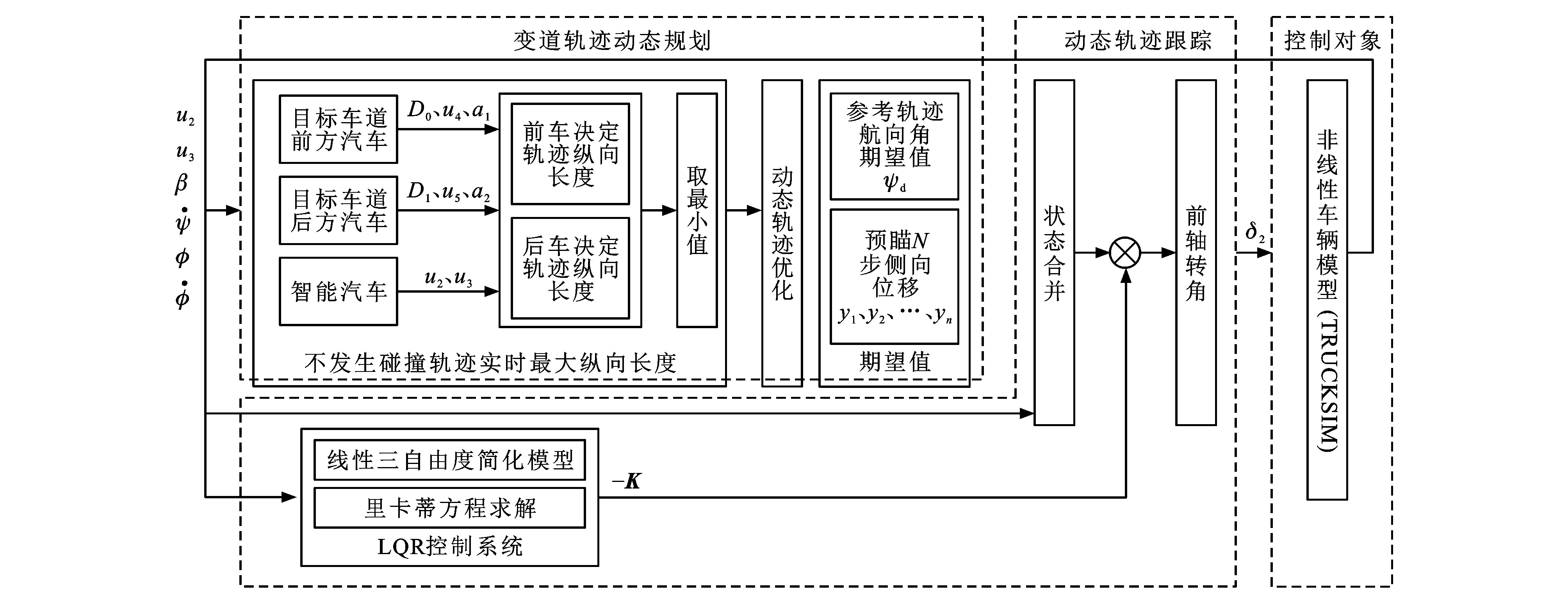
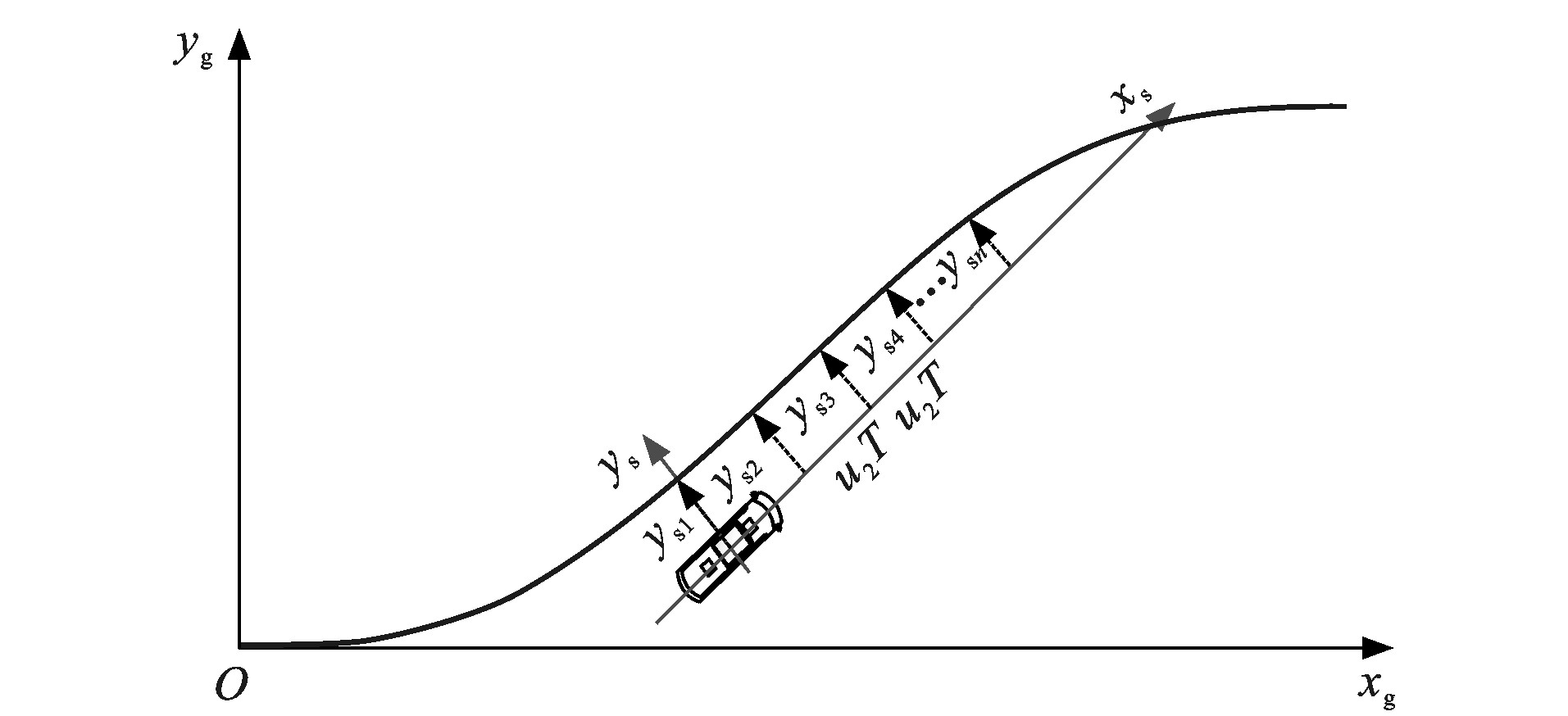
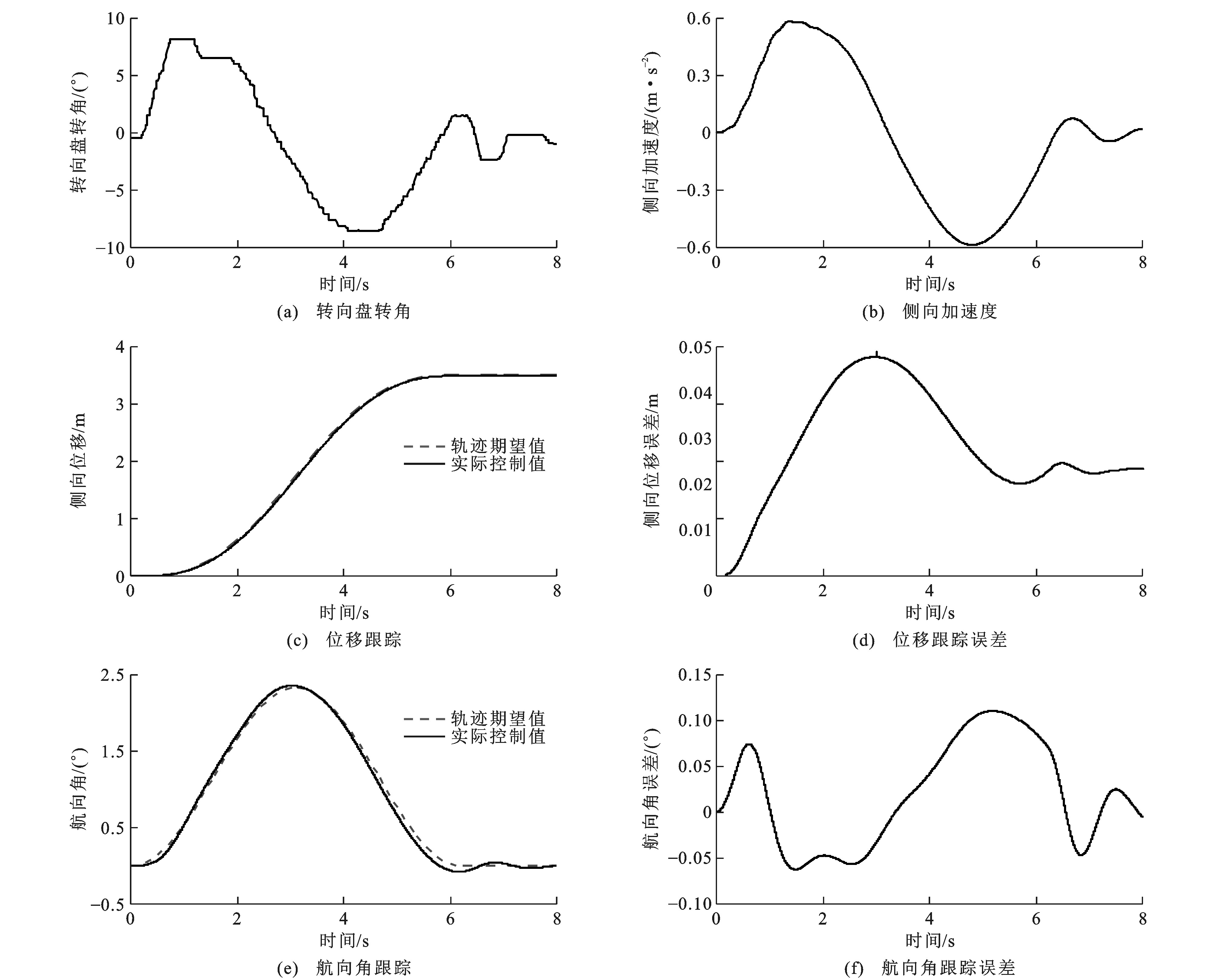
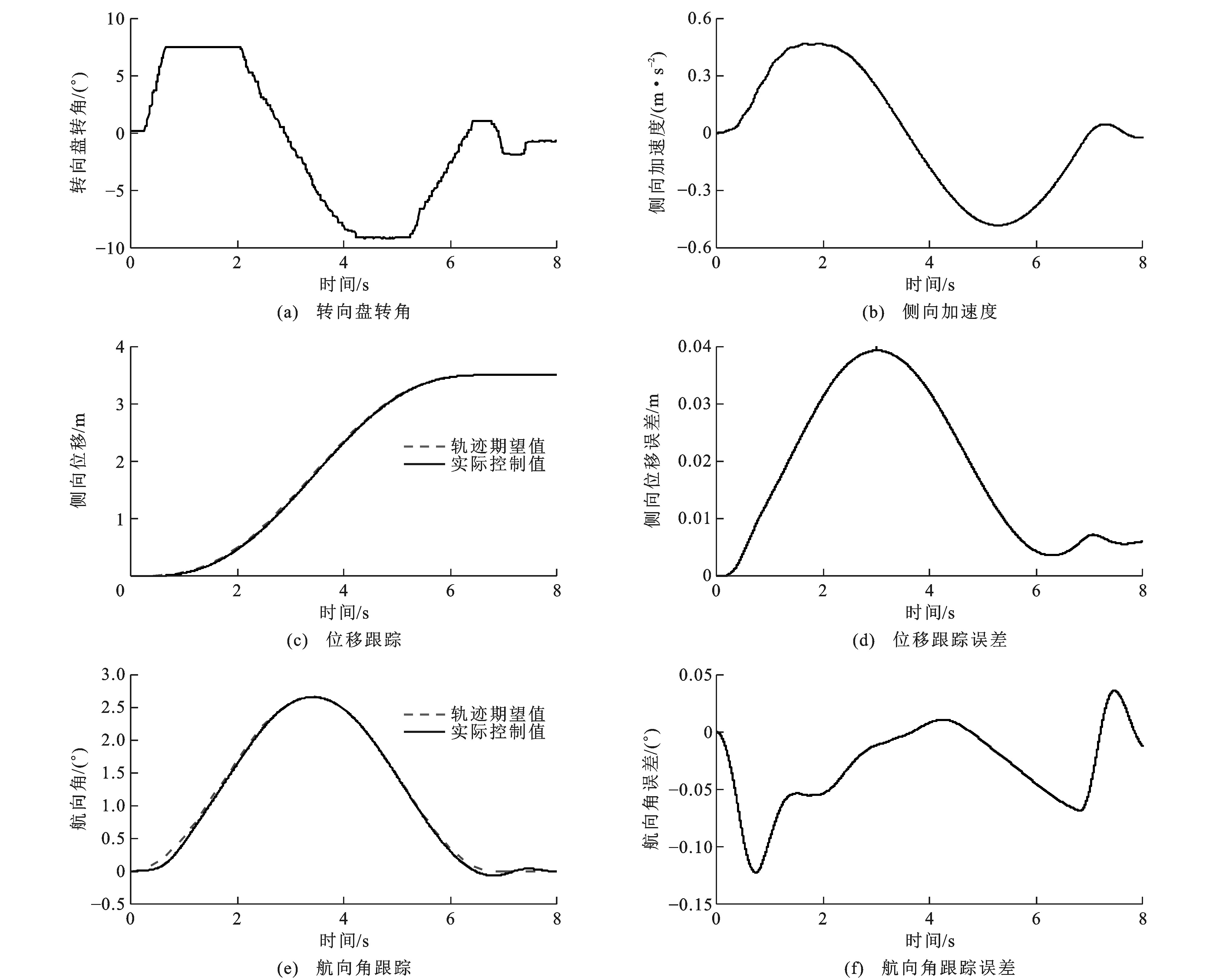
摘要:
为实现实际动态交通环境下智能汽车的变道控制, 提出了基于轨迹预瞄的智能汽车变道动态轨迹规划与跟踪控制策略; 针对实际交通环境下目标车道车速和加速度的动态变化, 提出了智能汽车变道动态轨迹规划算法, 获得了能够避免智能汽车发生碰撞的变道轨迹的动态最大纵向长度; 设计了兼顾变道效率和乘员舒适性的优化目标函数, 优化获得了在变道轨迹最大纵向长度范围内的实时动态最优变道轨迹; 利用轨迹预瞄前馈和状态反馈相结合的类人转向控制方式, 实现了智能汽车变道动态轨迹跟踪和乘员舒适性的最优控制, 并利用硬件在环试验台验证了所提控制策略的正确性。研究结果表明: 定速工况下实际与参考轨迹的侧向位移误差、航向角误差和最大侧向加速度分别为1.4%、4.8%和0.59 m·s
-2
; 定加速度工况下实际与参考轨迹的侧向位移误差、航向角误差和最大侧向加速度分别为1.1%、4.6%和0.48 m·s
-2
; 变加速度激烈工况下实际与参考轨迹的侧向位移误差和最大侧向加速度分别为1.7%和0.80 m·s
-2
, 航向角超调后能迅速重新跟踪动态轨迹航向角; 所提控制策略可以很好地跟踪控制实际交通环境下目标车道汽车在定车速、定加速度和变加速度工况下的智能汽车动态变道轨迹, 从而能实现智能汽车最优变道, 可确保变道过程中不与目标车道汽车发生碰撞, 并兼顾变道效率和乘员舒适性。
更多>
2020, 20(2): 147-160.
doi:
10.19818/j.cnki.1671-1637.2020.02.012
摘要
(
2932
)
HTML
(
680
)
PDF (3459KB)
(
608
)
引用
(
)
自供电路侧单元能量-时延均衡分组调度策略
代亮
,
翟一鸣
,
汪贵平
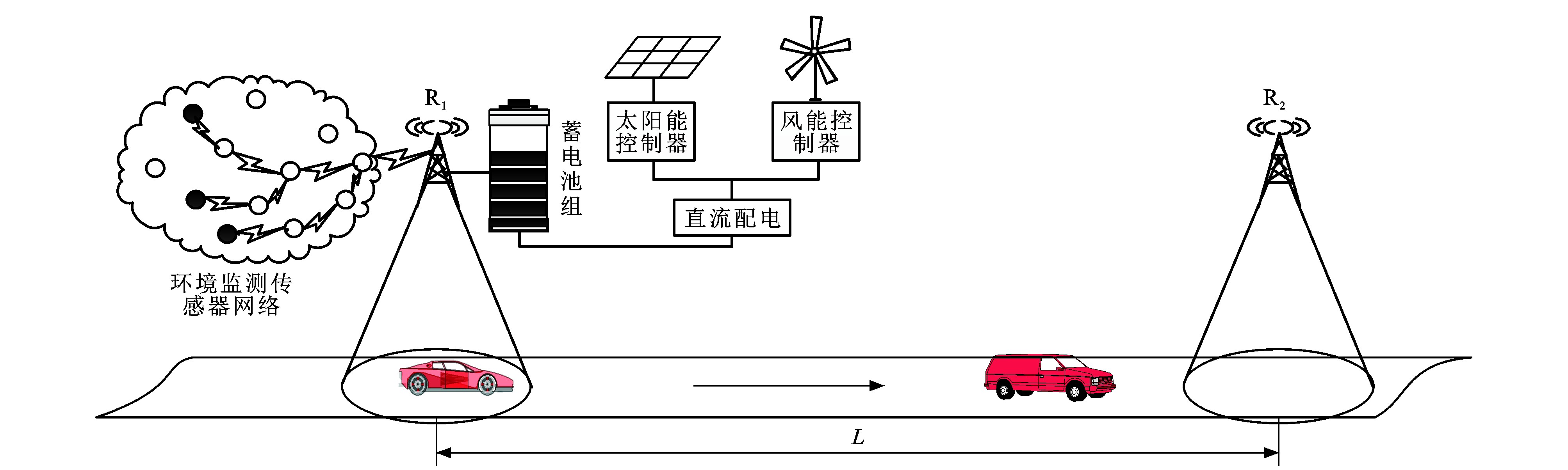
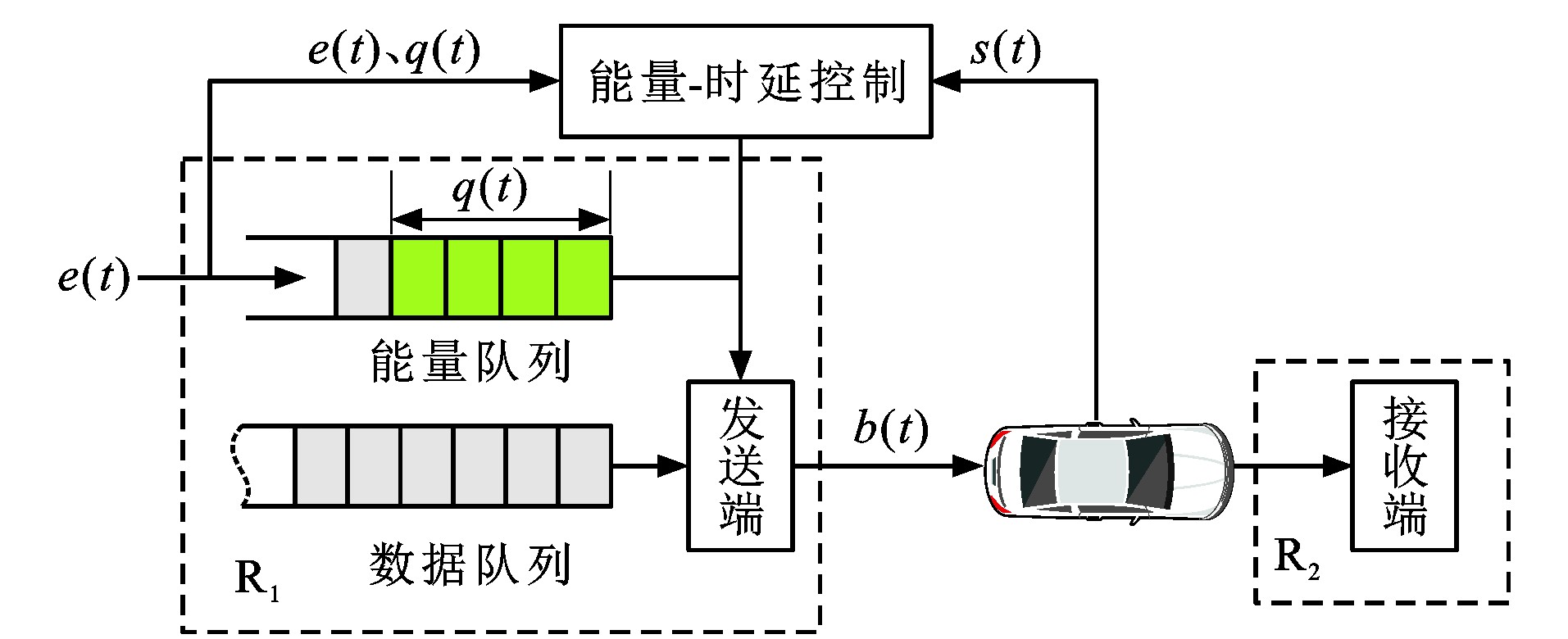
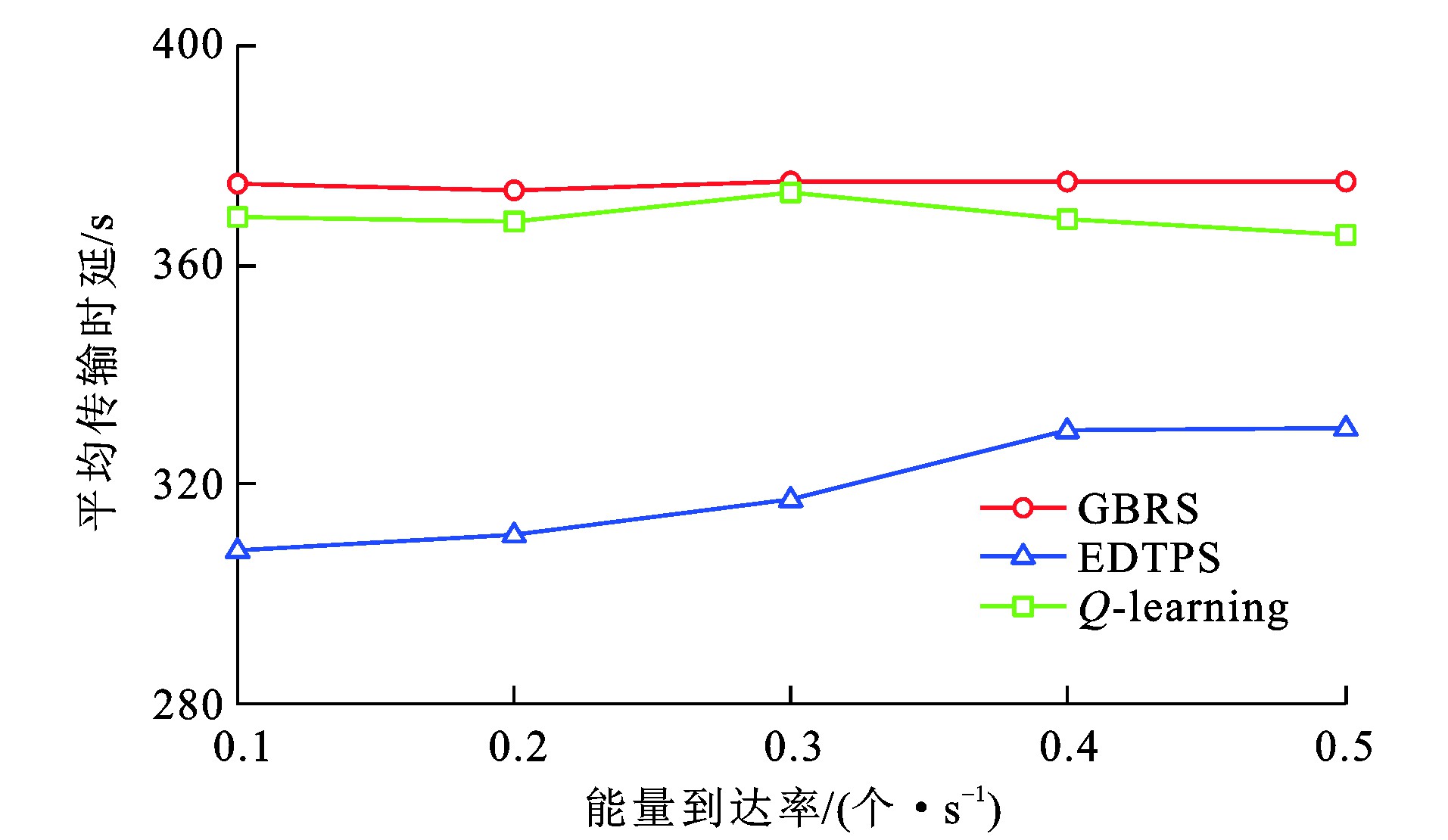
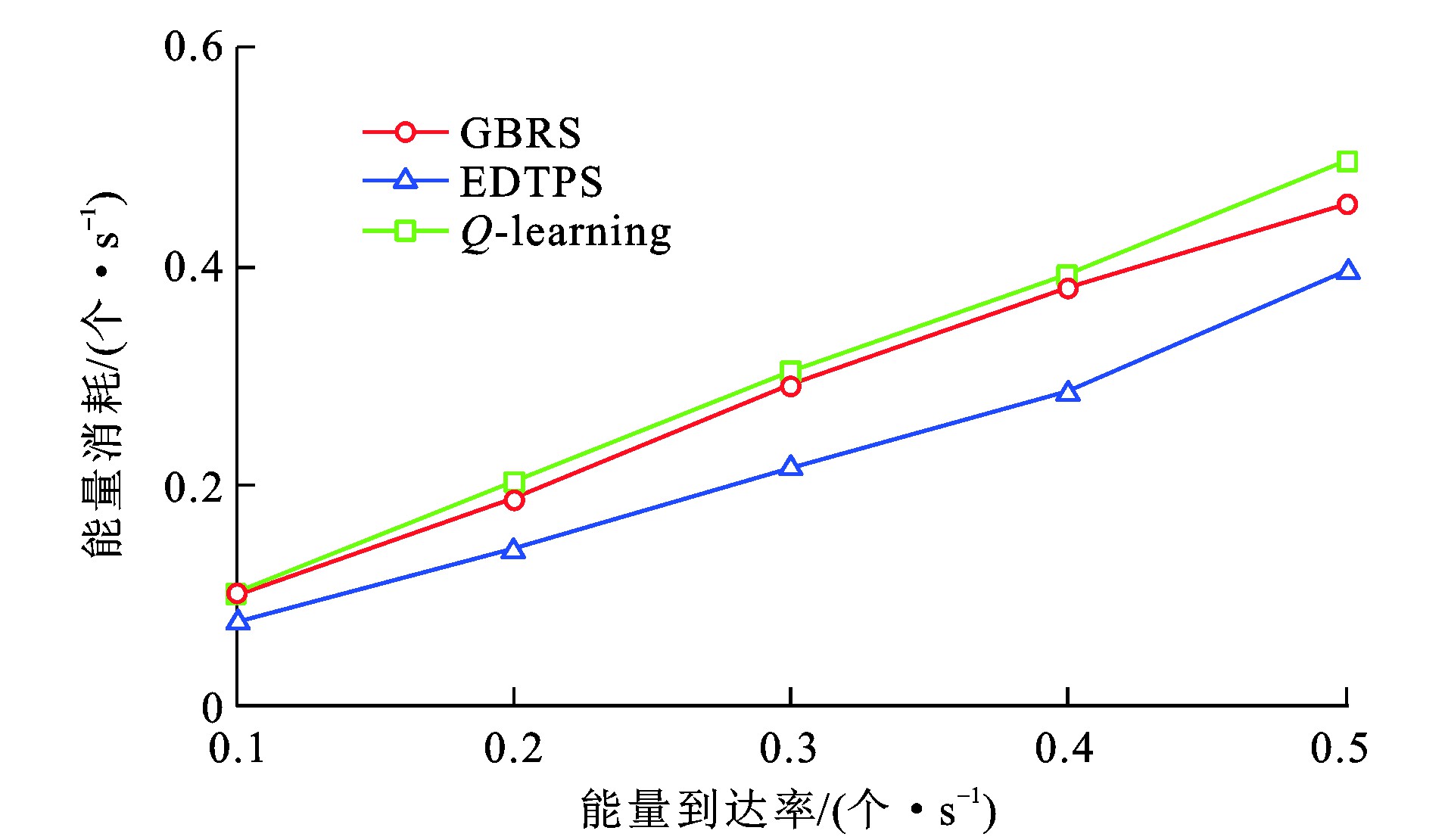
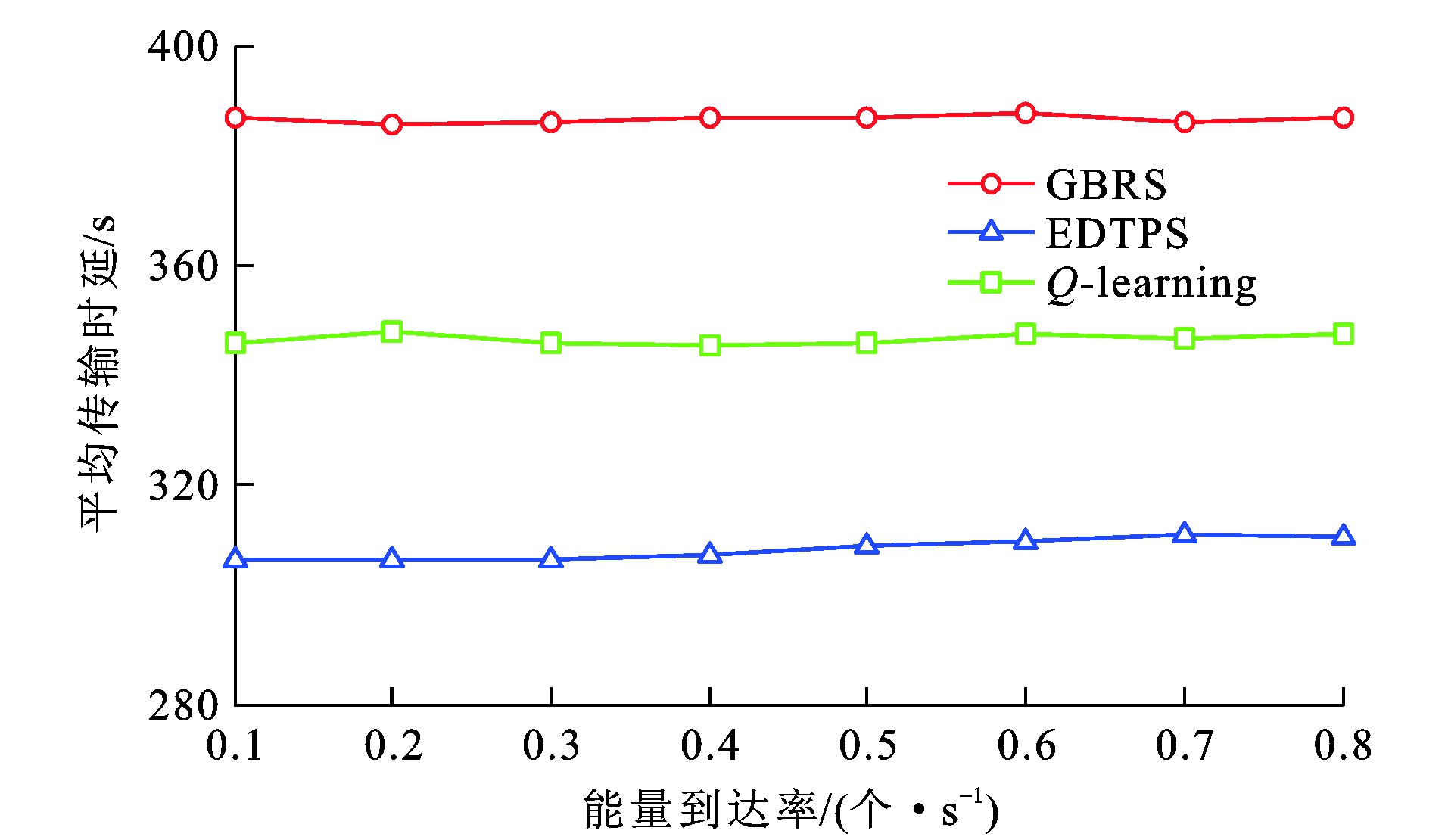
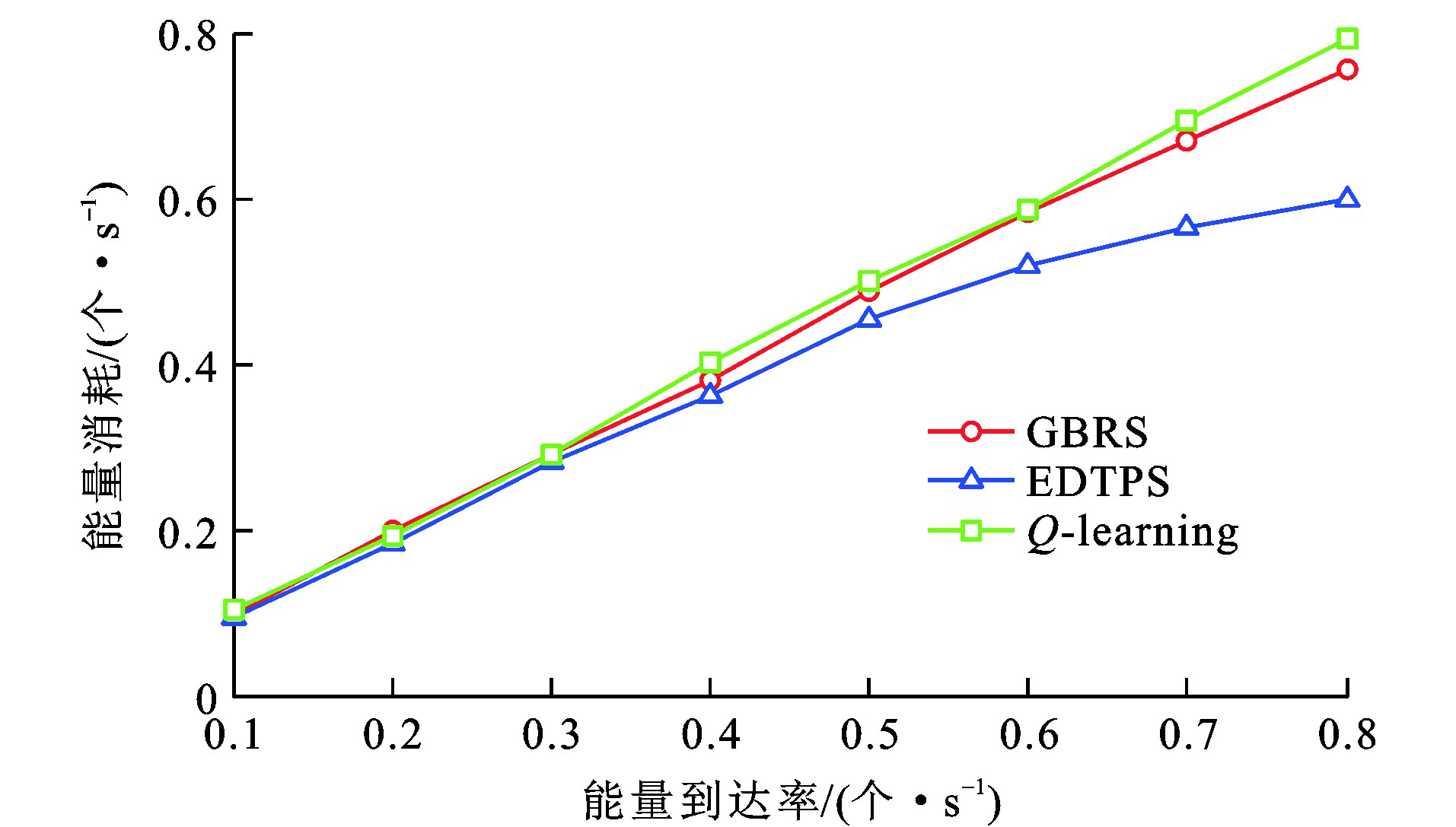
摘要:
考虑了自供电路侧单元在分组传输过程中能量收集、车辆到达与车速的随机性, 基于受限马尔科夫决策模型建立分组调度系统模型, 研究了分组平均传输时延与能量消耗; 分析了在能量队列约束下最小分组平均传输时延的优化问题, 提出了自供电路侧单元能量-时延均衡分组调度策略, 通过仿真试验分析了最优分组调度策略性能, 并与贪婪中继方案和
Q
-learning算法进行对比。仿真结果表明: 该分组调度策略具有双门限结构, 系统通过自供电路侧单元的能量队列状态以及到达车辆的车速状态确定决策变量, 使系统可以在考虑能量利用效率的前提下降低监测数据分组的平均传输时延, 保证自供电路侧单元在能量存储不溢出不耗尽的同时, 最小化系统分组平均传输时延; 在单分组发送模型中, 提出的分组调度策略的平均传输时延相比贪婪中继方案降低了15.7%, 相比
Q
-learning算法降低了13.5%;在批量分组发送模型中, 其分组平均传输时延相比贪婪中继方案降低了20.4%, 相比
Q
-learning算法降低了11.5%。
更多>
2020, 20(2): 161-171.
doi:
10.19818/j.cnki.1671-1637.2020.02.013
摘要
(
1730
)
HTML
(
419
)
PDF (2522KB)
(
386
)
引用
(
)
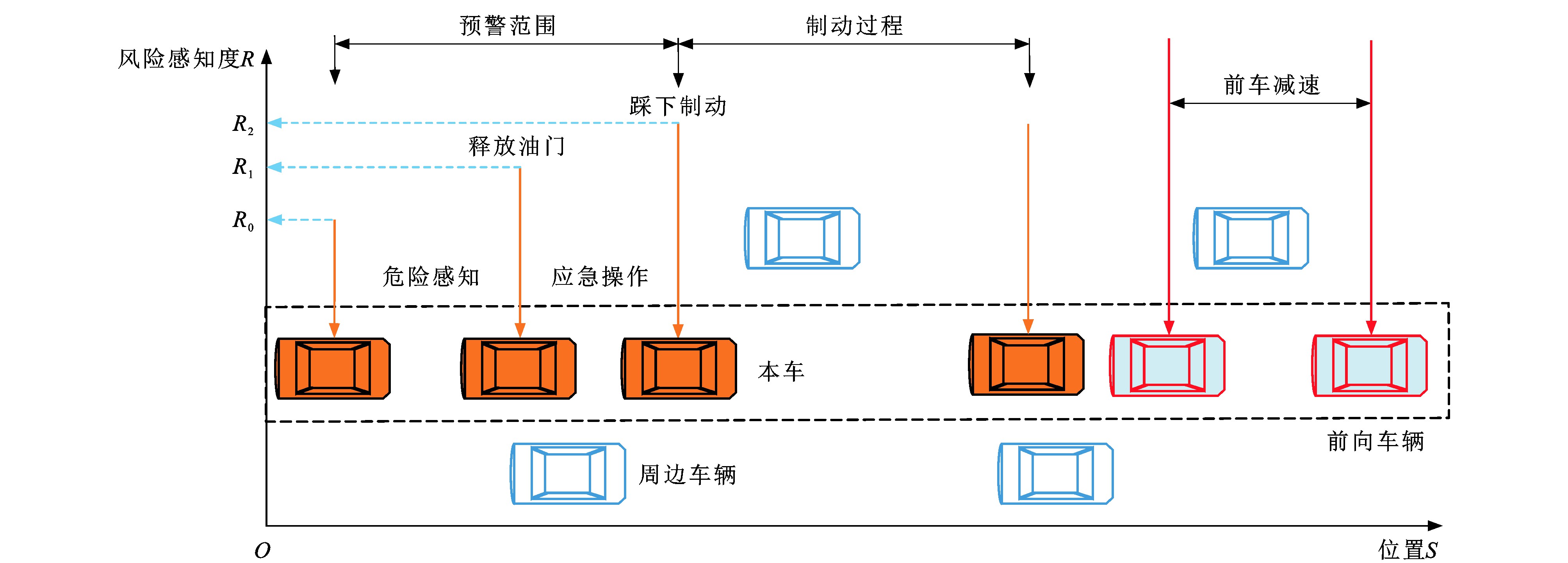
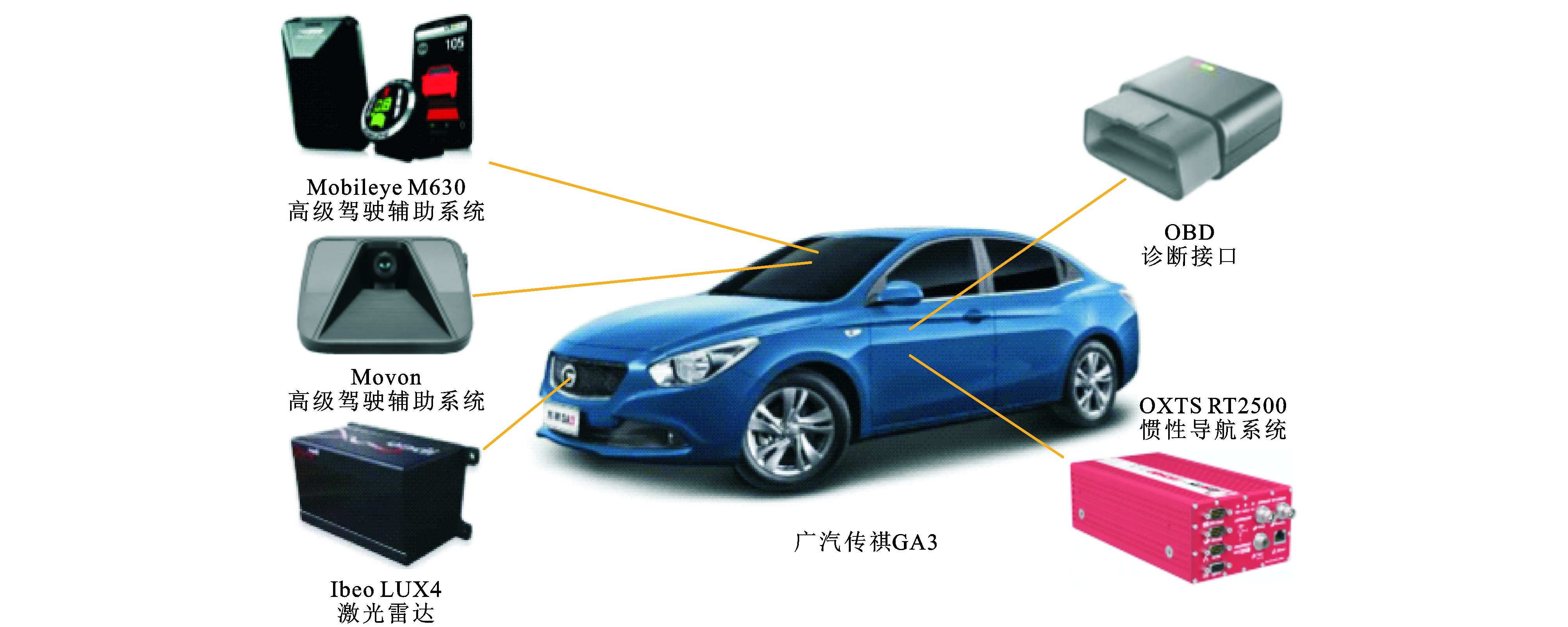
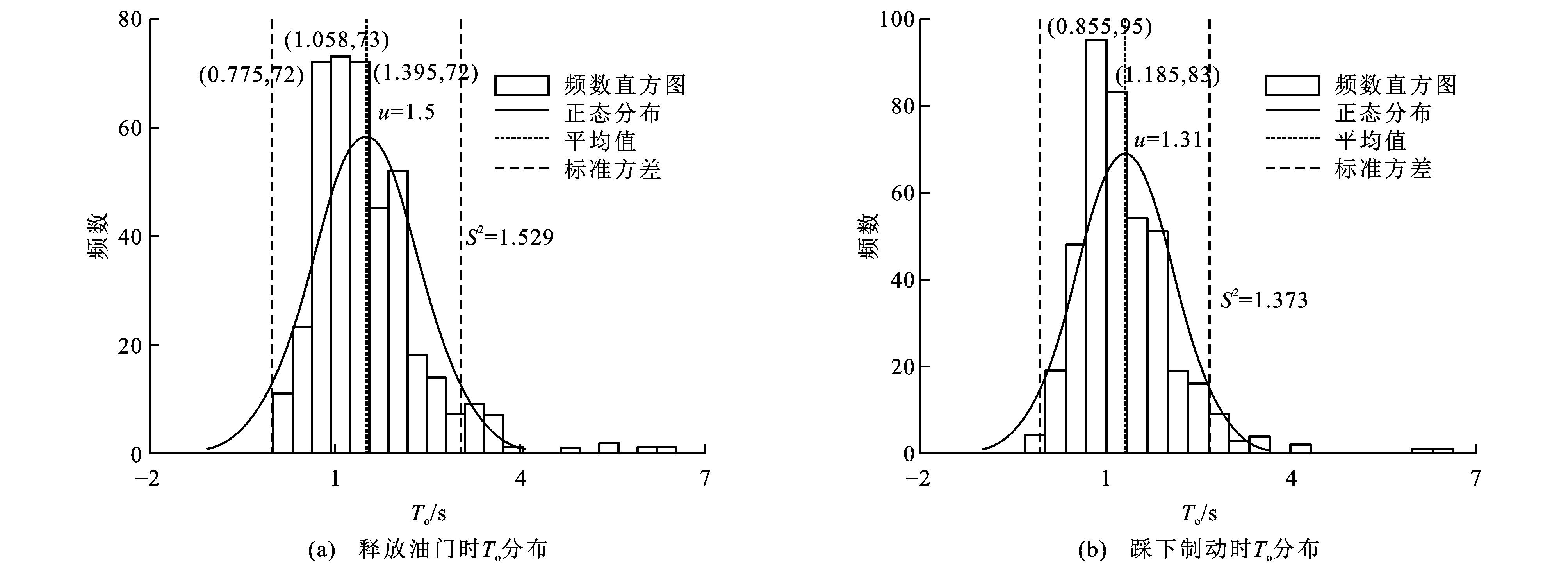
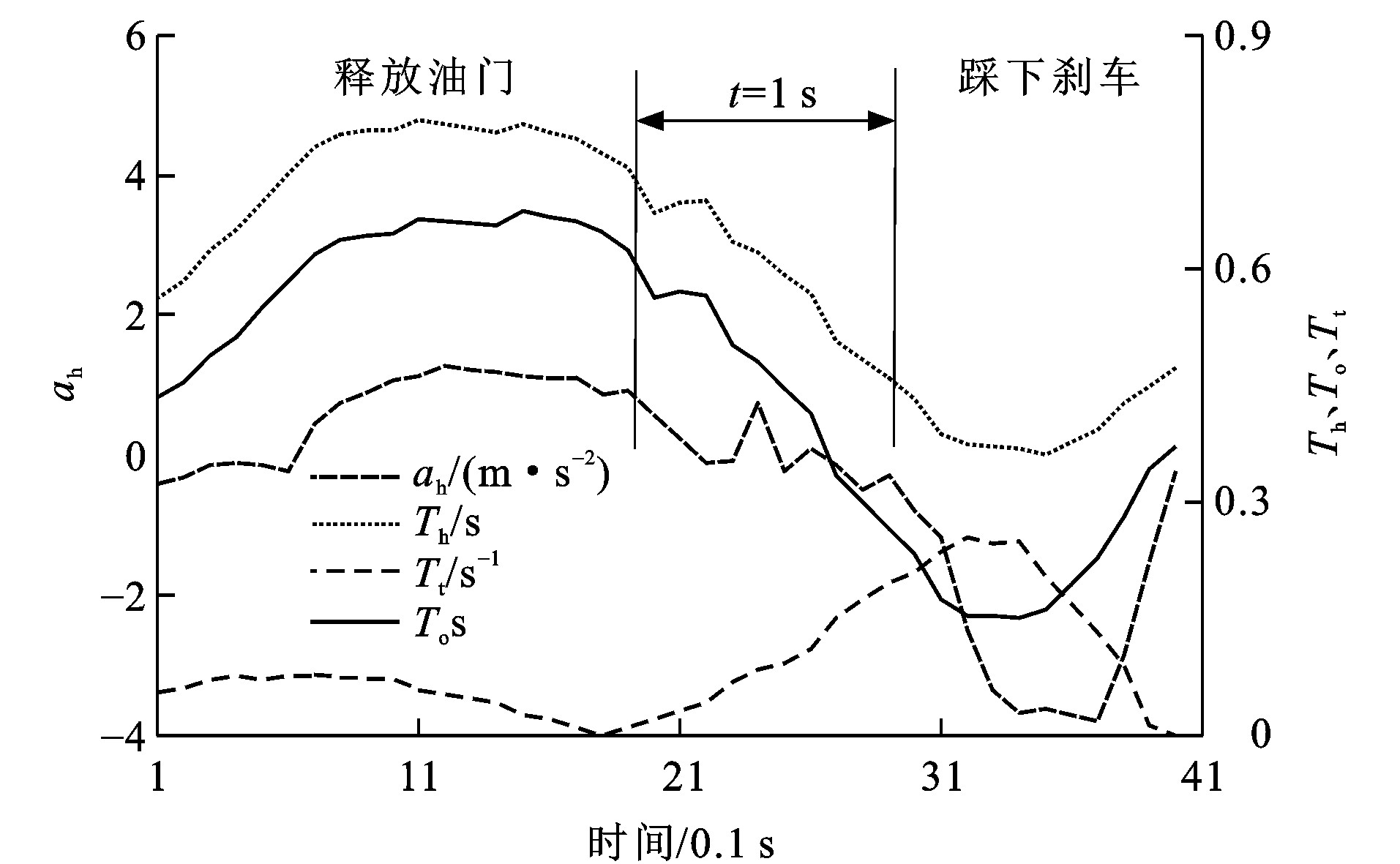
基于客观风险感知特性的前向碰撞预警算法优化与标定
吕能超
,
郑梦凡
,
郝威
,
吴超仲
,
吴浩然
摘要:
为提升高级驾驶辅助系统(ADAS)预警算法在复杂行车环境下的适应性, 提出了一种基于车辆运动学和风险感知特性的综合预警算法——客观风险感知(ORP)算法; 通过典型工况下的分析与推导, 表明其预警算法为THW、TTC和SM预警算法的综合形式; 为了标定预警算法的参数阈值, 开展了累计4 500 km自然驾驶试验, 最终筛选出409例有效临近碰撞事件, 提取了释放油门、踩下制动时刻的客观风险感知参数分布特征; 根据自然驾驶数据中提取的临近碰撞事件及其参数特征, 对风险预警算法参数进行标定; 在模拟驾驶环境下开发了前向碰撞预警算法, 通过4种风险场景开展了算法验证试验。研究结果表明: 基于自然驾驶数据的参数标定, 客观风险感知预警算法的两级预警参数阈值分别为1.4、0.8 s; 基于典型风险工况下的微观驾驶行为特性对比, 预警有效性方面ORP预警算法稍高于RP预警算法, 二者预警有效性显著高于TTC预警算法; 在预警算法下所有驾驶片段的最小碰撞时间均值方面, ORP预警算法为2.02 s, RP预警算法为1.90 s, TTC预警算法为1.65 s, 表明ORP预警算法能适应复杂风险环境下的风险辨识。基于大量实车试验参数标定与效果验证后, 所提出预警算法可用于高级驾驶辅助系统风险辨识。
更多>
2020, 20(2): 172-183.
doi:
10.19818/j.cnki.1671-1637.2020.02.014
摘要
(
2211
)
HTML
(
550
)
PDF (2822KB)
(
532
)
引用
(
)
多前车影响的智能网联车辆纵向控制模型
吴兵
,
王文璇
,
李林波
,
刘艳婷
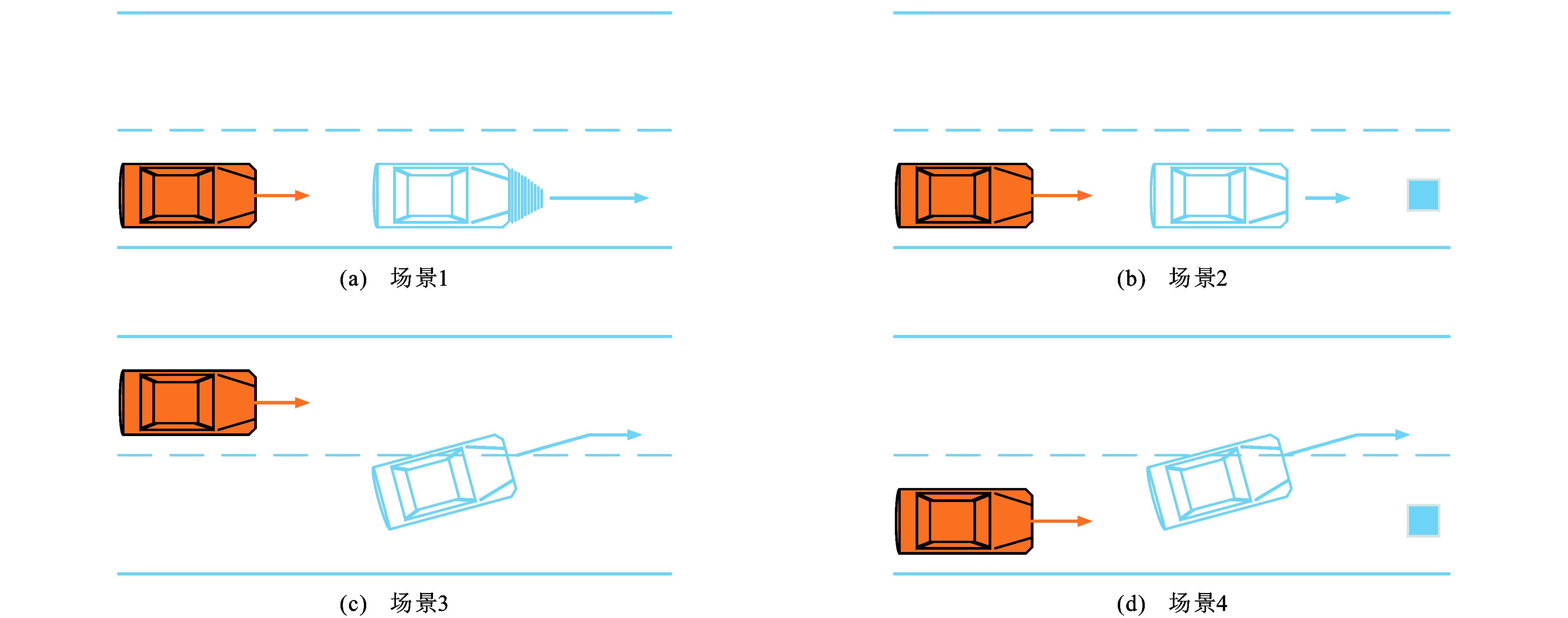
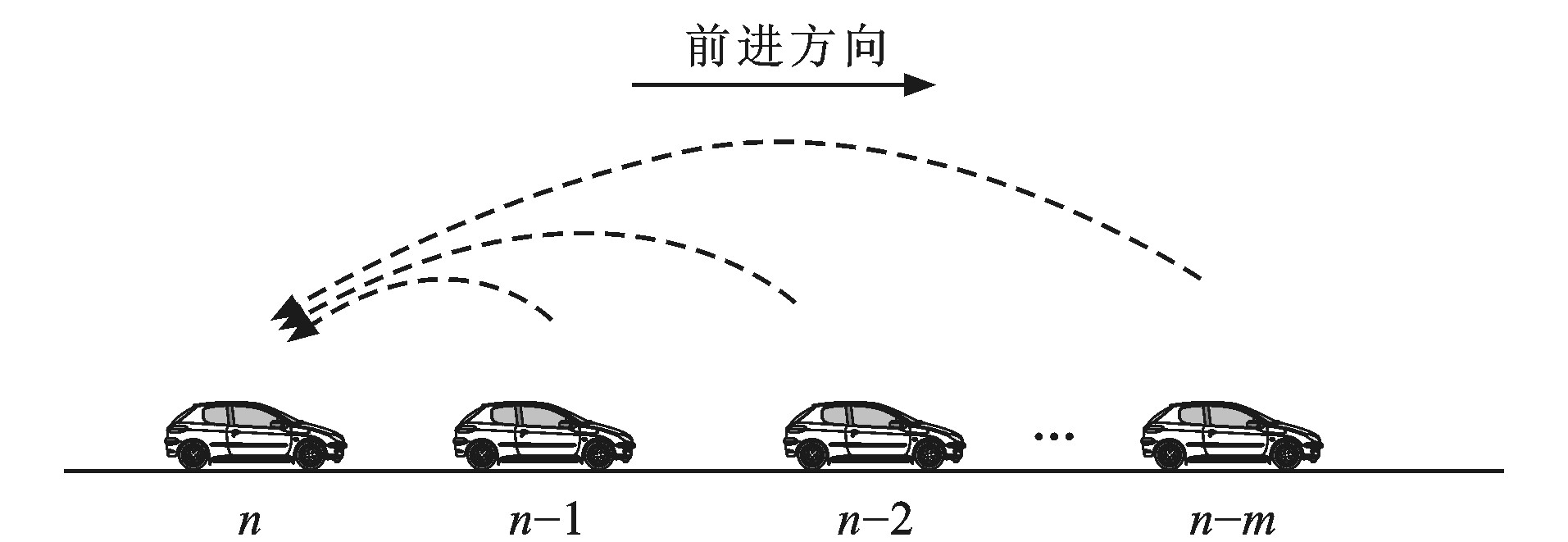
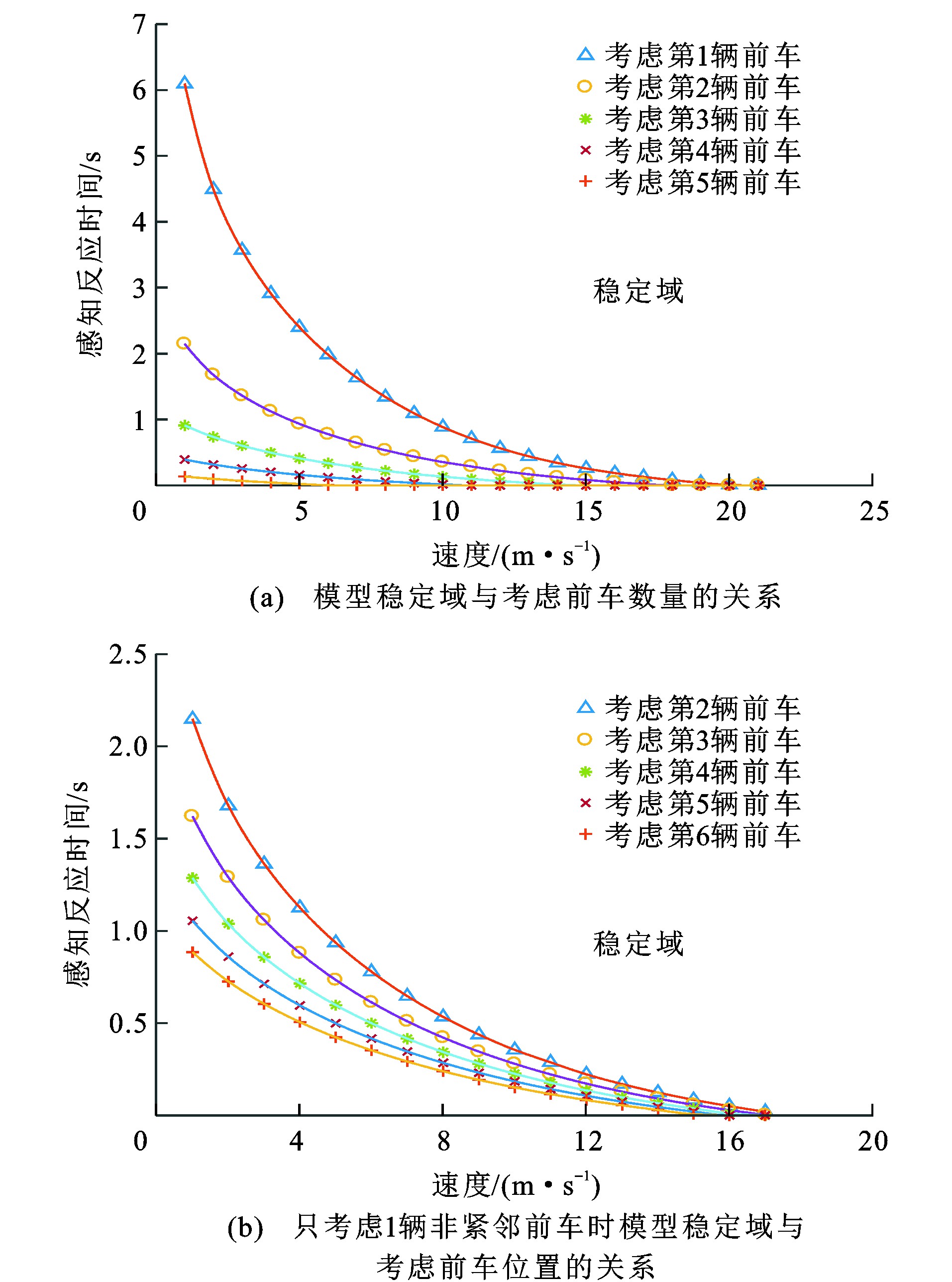
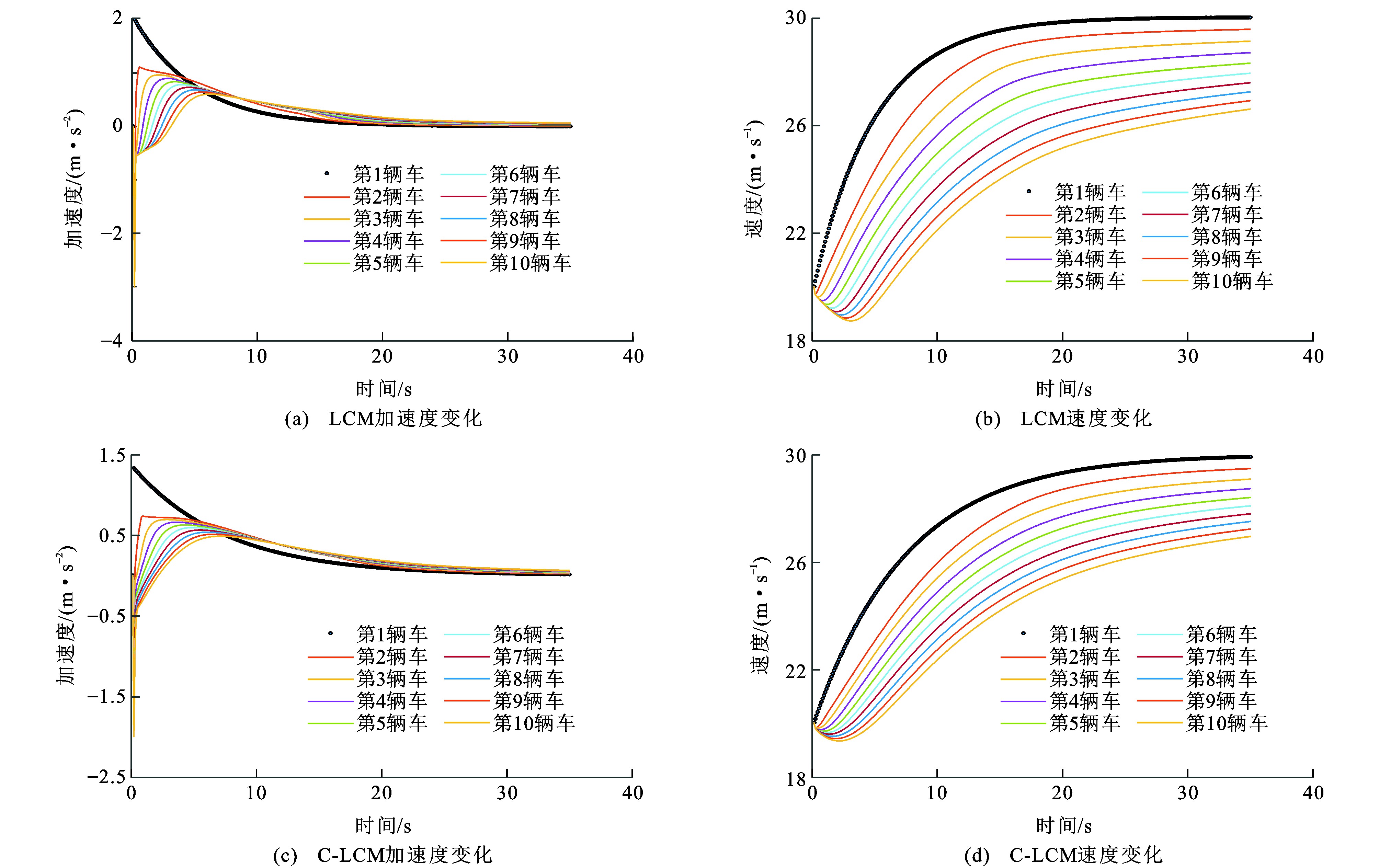
摘要:
为了更好地模拟智能网联车辆(CAV)的跟驰特性, 在纵向控制模型(LCM)的基础上考虑V2V环境下多辆前车速度和加速度的影响, 构建了智能网联环境下的纵向控制模型(C-LCM); 对LCM和C-LCM进行稳定性分析, 比较了2个模型的交通流稳定域, 确定了不同通信距离时C-LCM对交通流稳定域的影响; 设计数值仿真试验对加速和减速的常见交通场景进行模拟, 分析了在V2V通信条件下CAV的跟驰行为特征; 仿真分析了CAV不同通信距离以及不同渗透率影响下的交通流安全水平; 构建了包含不同CAV渗透率的混合交通流基本图模型。研究结果表明: 交通流稳定域随着考虑前车数量的增多而增大, 当只考虑1辆前车时, 前车与本车的间隔越远, 车辆速度系数对C-LCM稳定域的影响越大; C-LCM可以提前对多前车的行为做出反应, 更好地模拟CAV的动力学特征, 在减速情景中速度超调量从0.15减少为0.08, 最大速度延迟时间由7.5 s缩短为4.9 s, 在加速情景中速度超调量从0.07减少为0.04, 最小速度延迟时间由3.5 s缩短为2.6 s; 随着CAV渗透率的提升, 交通流的安全水平不断提升, 当通信范围内有4辆CAV时, 交通流的安全性能达到最高, 其TIT和TET指标的最大减少量分别为57.22%和59.08%;随着CAV渗透率的提升, 道路通行能力从1 281 veh·h
-1
提升为3 204 veh·h
-1
。可见, 提出的C-LCM可以刻画不同车辆的跟驰特点, 实现混合交通流建模, 并降低混合交通流的复杂性, 为智能网联车辆对交通流的影响分析提供参考。
更多>
2020, 20(2): 184-194.
doi:
10.19818/j.cnki.1671-1637.2020.02.015
摘要
(
2548
)
HTML
(
634
)
PDF (4293KB)
(
522
)
引用
(
)
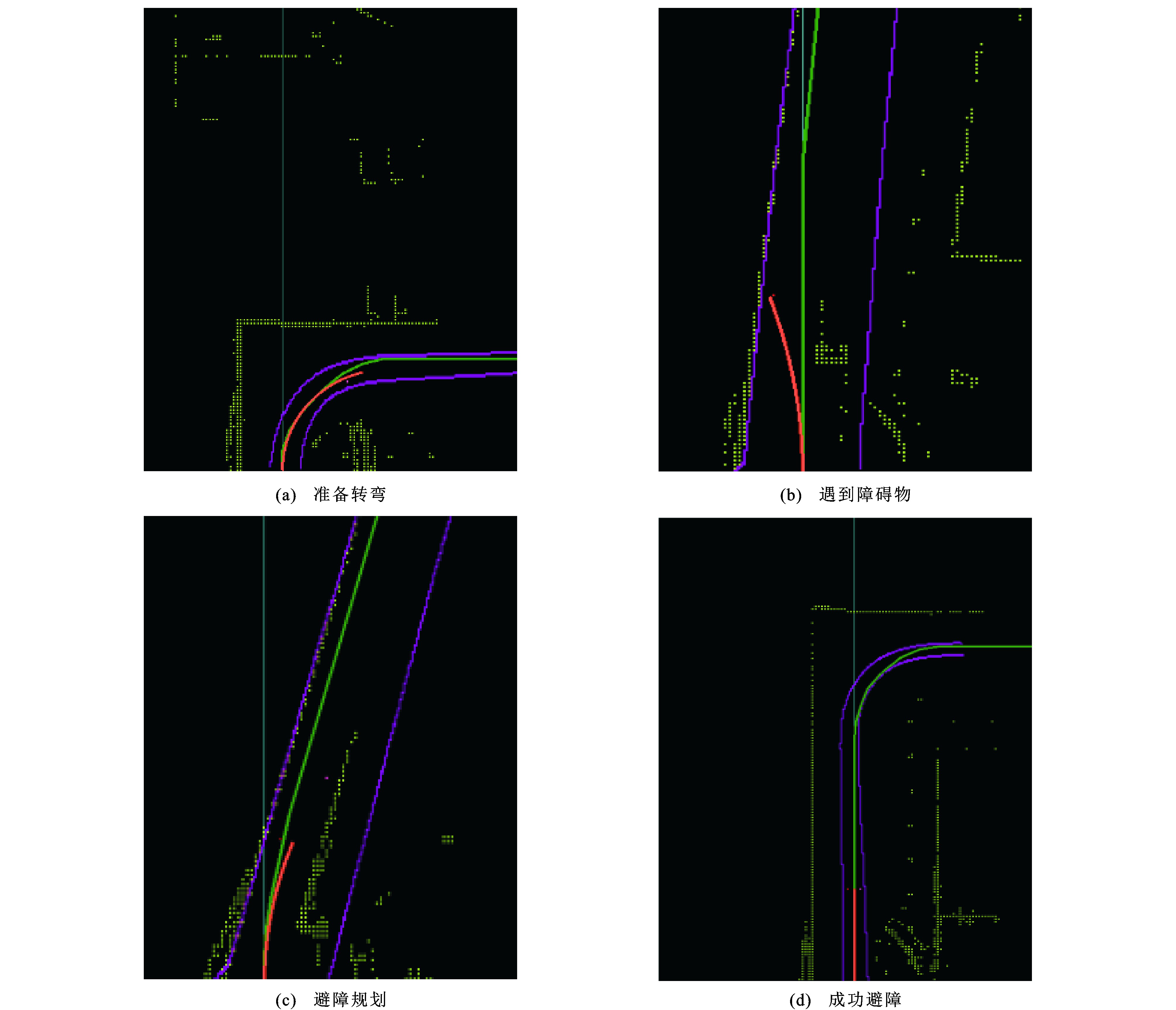
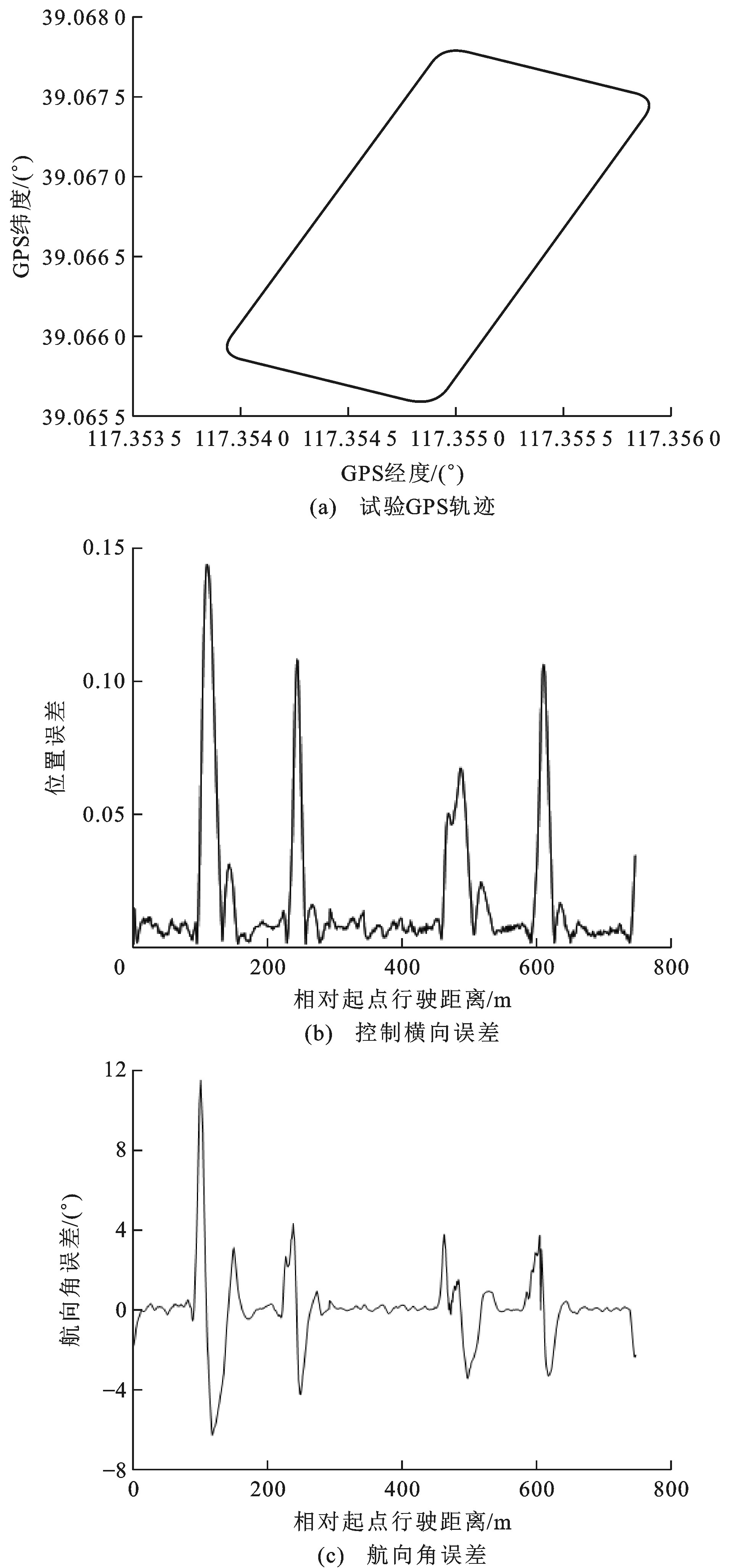
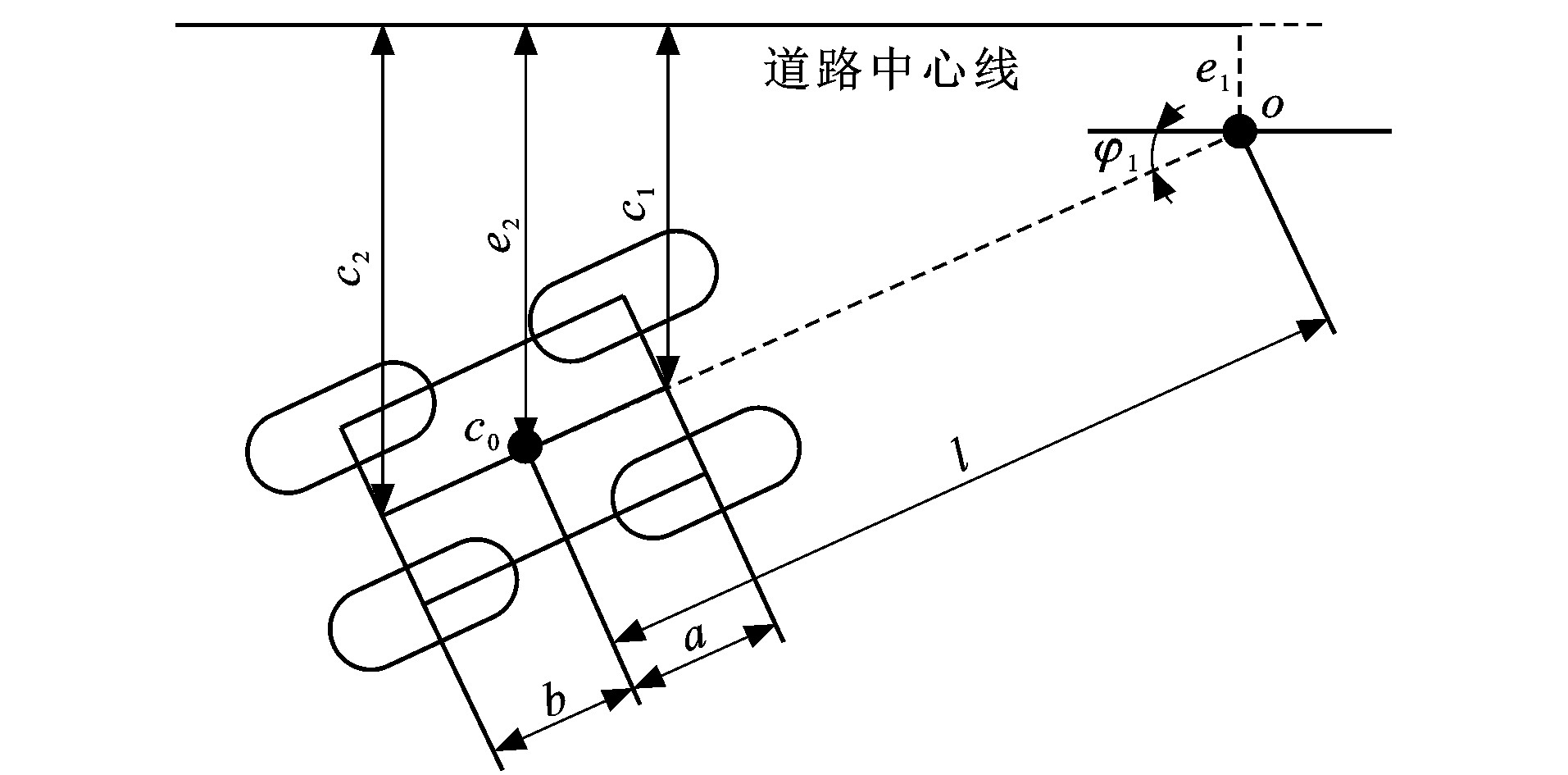
智能电动车弯曲道路场景中的避障路径规划
盛鹏程
,
罗新闻
,
李景蒲
,
吴学易
,
卞学良
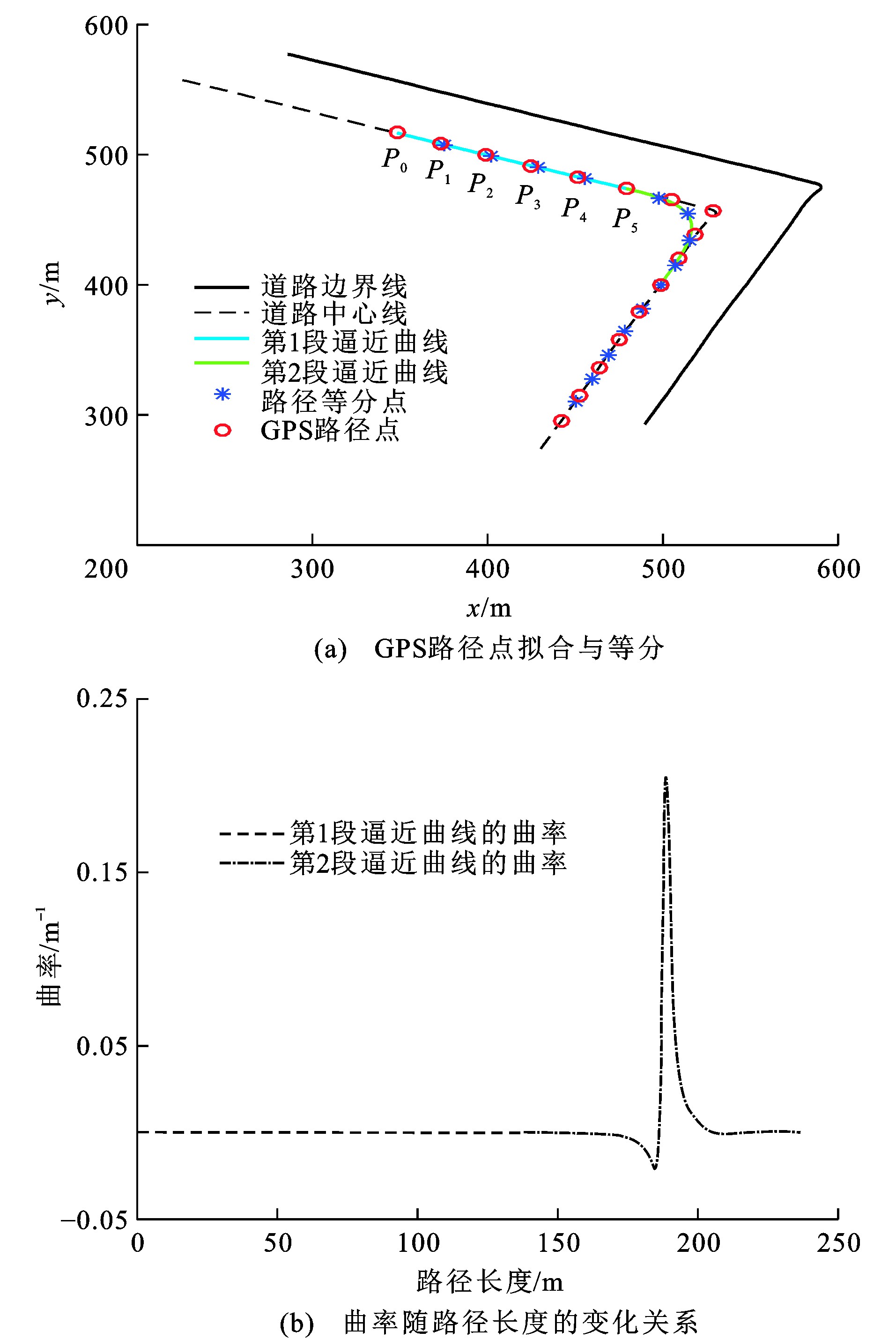
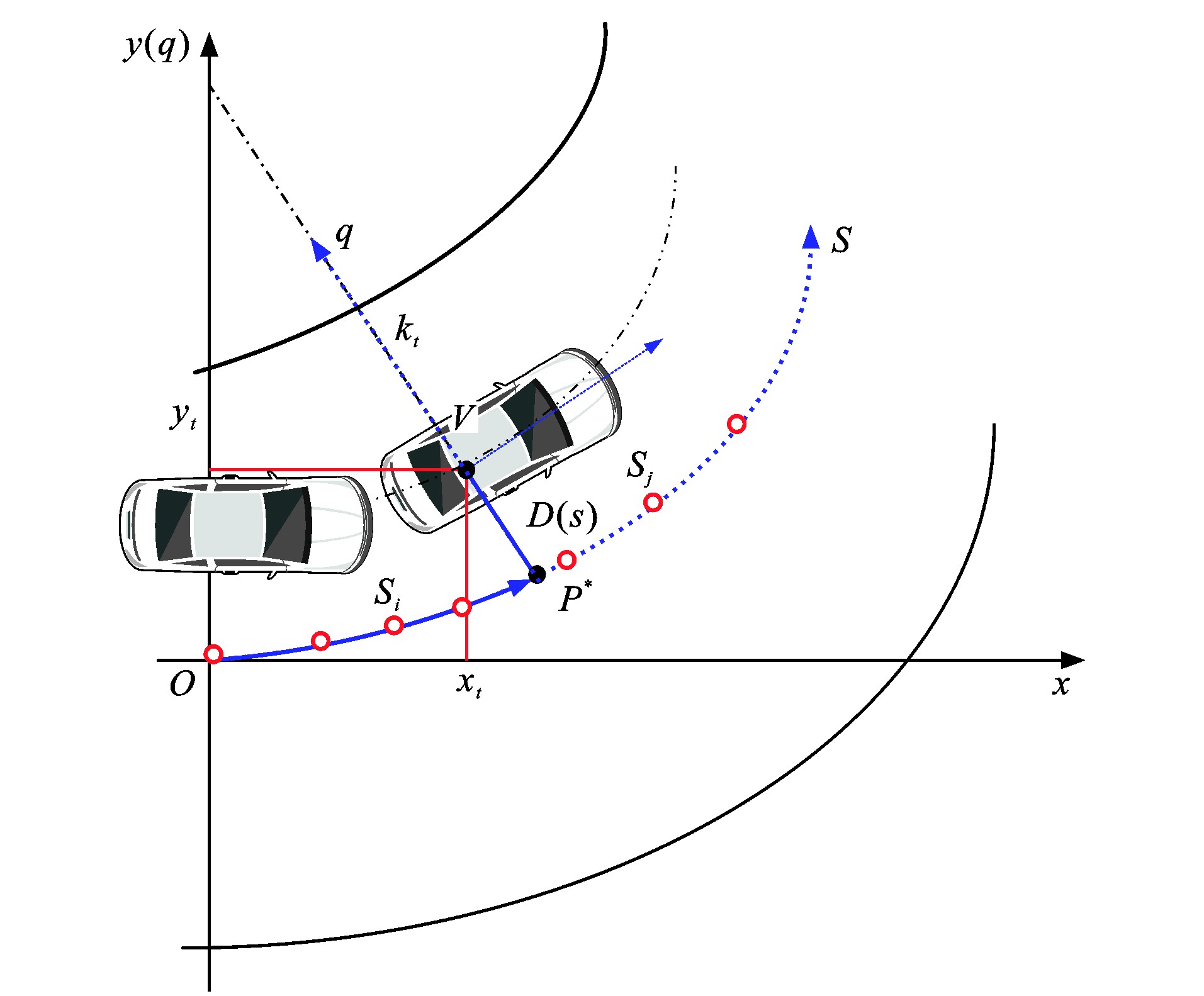
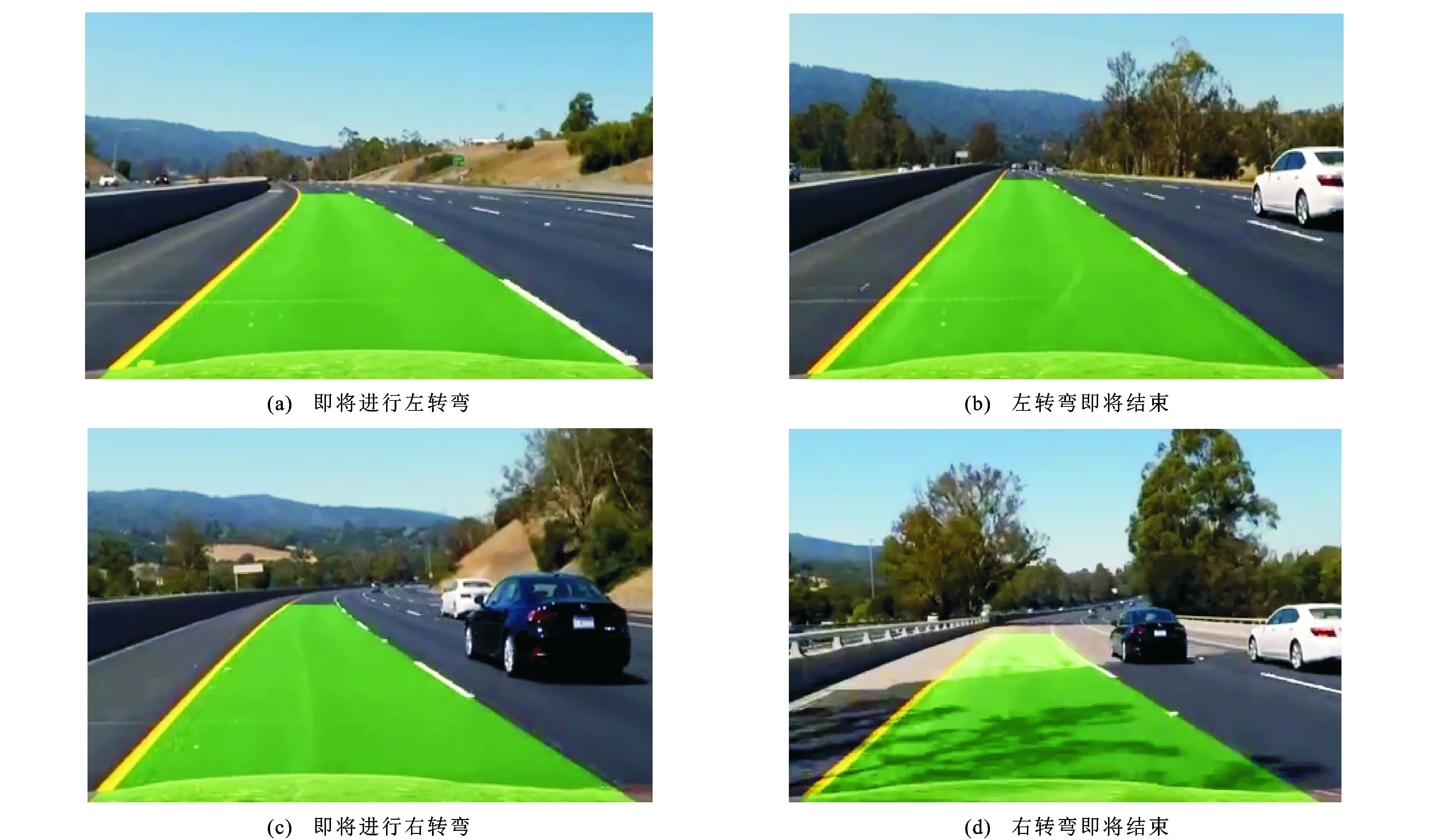
摘要:
为研究智能电动车在弯曲道路场景下进行避障规划的有效性, 提出了一种将笛卡尔坐标系转换为曲线坐标系的方法, 利用5次贝塞尔曲线对弯曲道路场景中的车道线进行逼近得到参考路径, 通过对参考路径进行弧长参数化, 以弧长为横坐标, 横向偏移为纵坐标的方法建立曲线坐标系, 根据车辆和子目标点在曲线坐标系中的位置关系, 采用3次多项式实时生成候选路径, 利用序列二次规划算法对候选路径进行优化; 为验证所提算法的有效性, 以某智能电动车为平台, 利用单目相机、64线激光雷达、工控机等设备搭建试验车, 通过Apollo平台对车辆在弯曲道路场景中的避障算法进行在线仿真, 在园区实车试验中对避障算法进行了GPS位置误差和航向角累计误差分析。研究结果表明: 在曲线坐标系中进行车辆弯曲道路场景下的避障路径规划, 能有效地描述规划路径曲率半径、车辆中心位置偏移车道线距离等信息, 容易确定自身车辆的可行驶区域、前方障碍物位置信息, 从而生成最优路径; 在园区场景的避障过程中, GPS位置误差发生在初始点、转弯点以及避障点, 最大误差为0.15 m, 航向角累计误差为12°, 突然增大的弯道位置误差主要由车辆姿态瞬时改变及障碍物匹配过程引起, 但是误差都能够很好地控制在一定范围之内, 利用曲线坐标系解决弯曲道路场景中的避障路径规划是可行的。
更多>
2020, 20(2): 195-204.
doi:
10.19818/j.cnki.1671-1637.2020.02.016
摘要
(
1910
)
HTML
(
484
)
PDF (4623KB)
(
512
)
引用
(
)
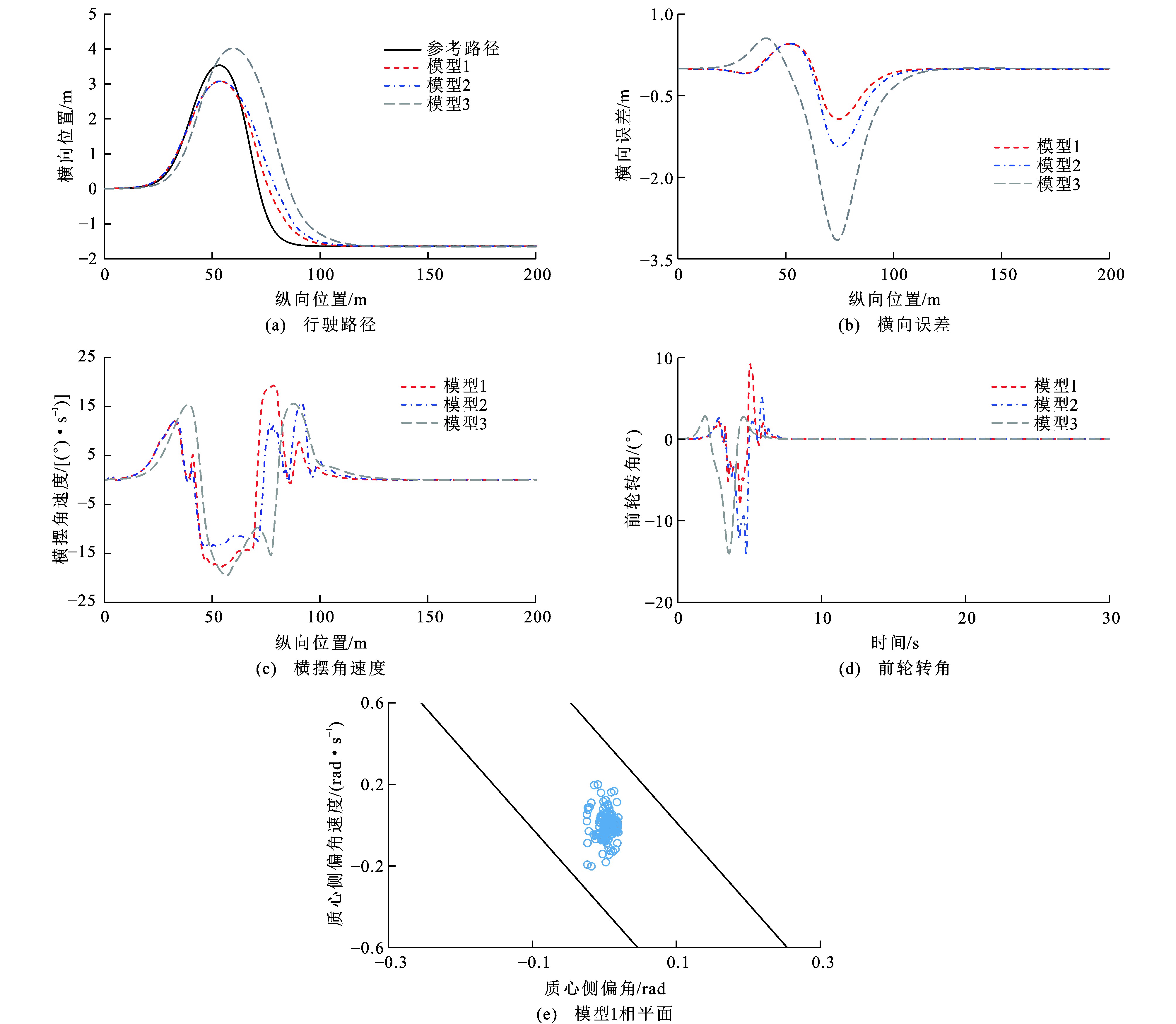
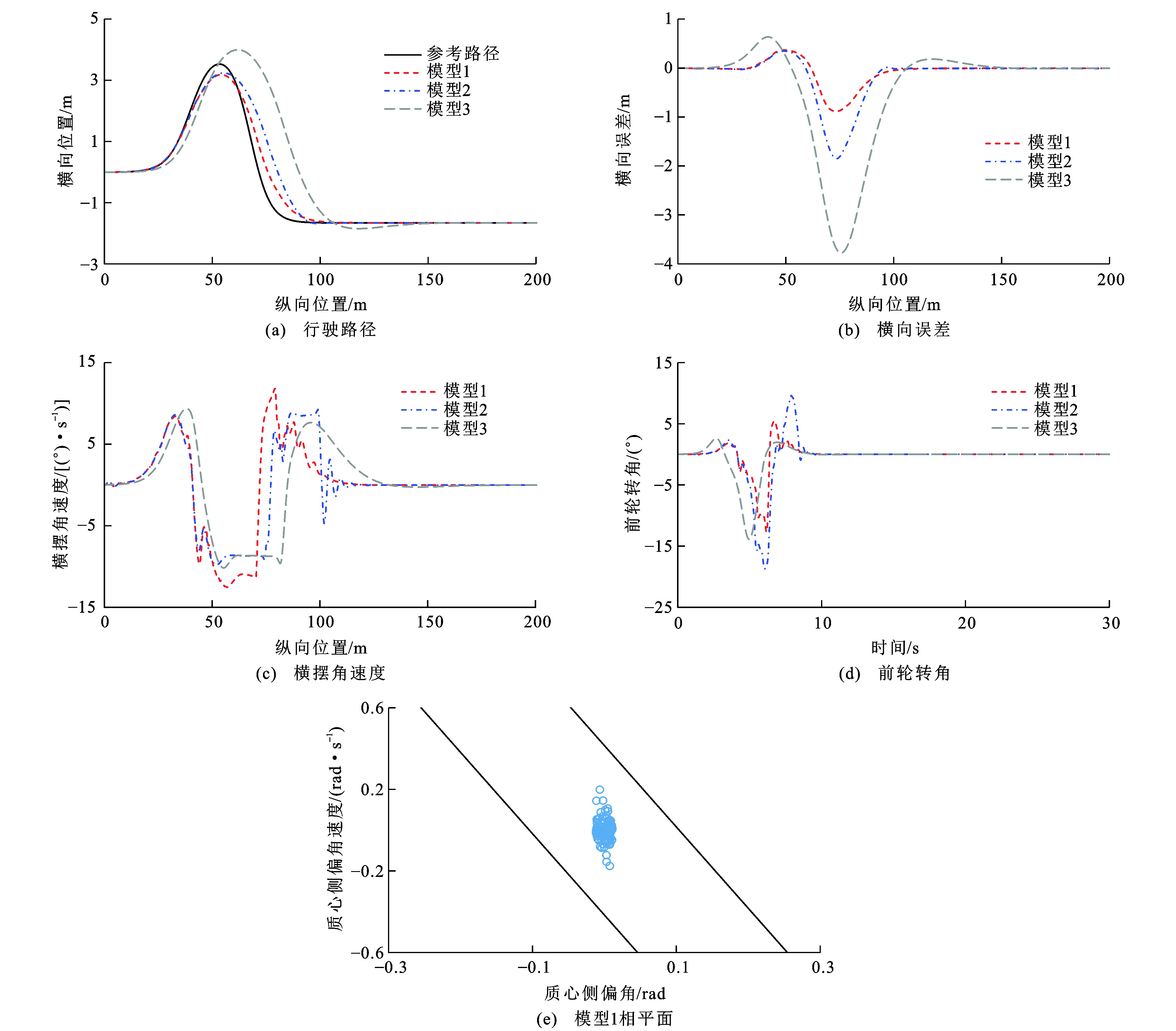
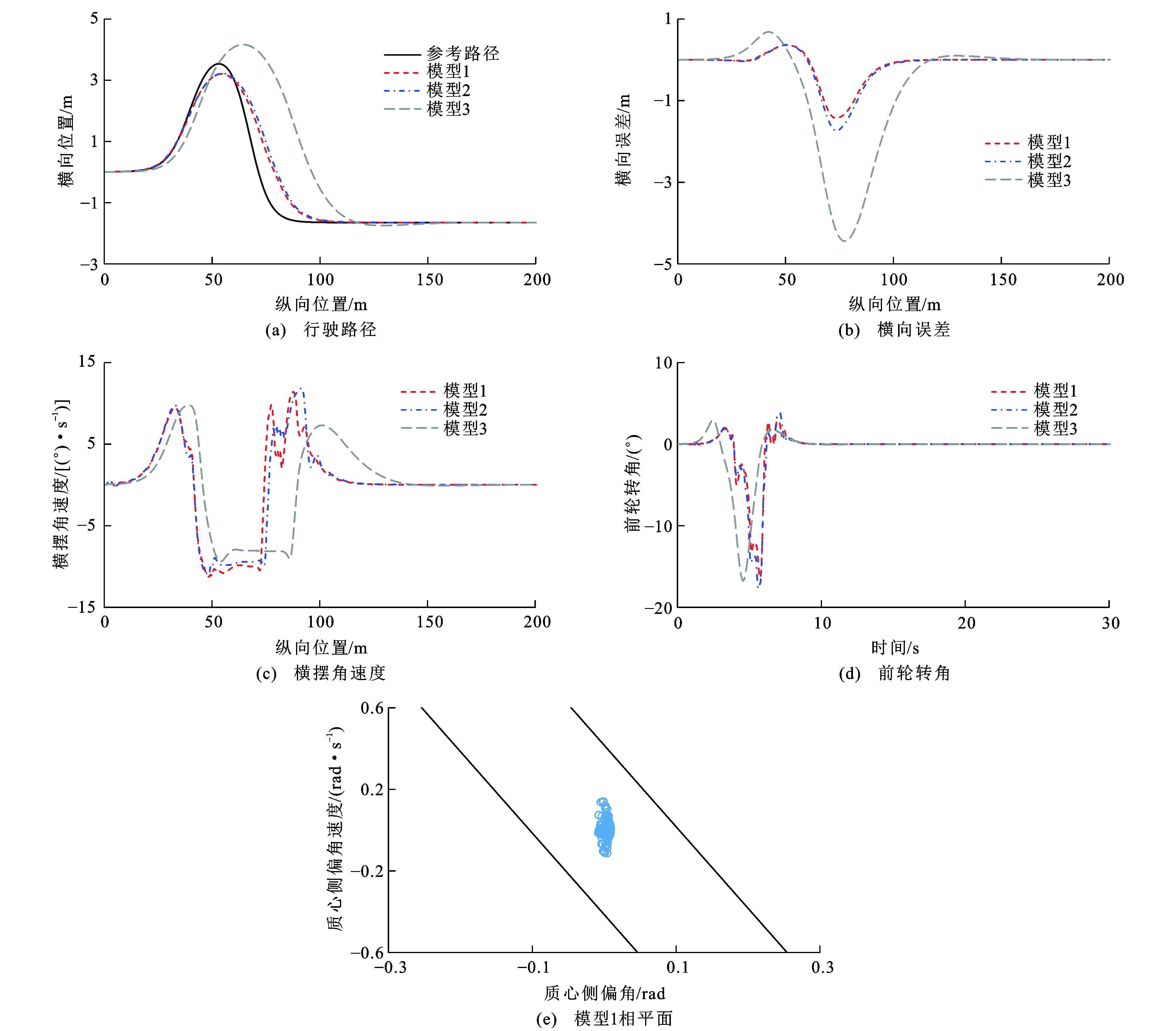
融合稳定性的高速无人驾驶车辆纵横向协调控制方法
李军
,
唐爽
,
黄志祥
,
周伟
摘要:
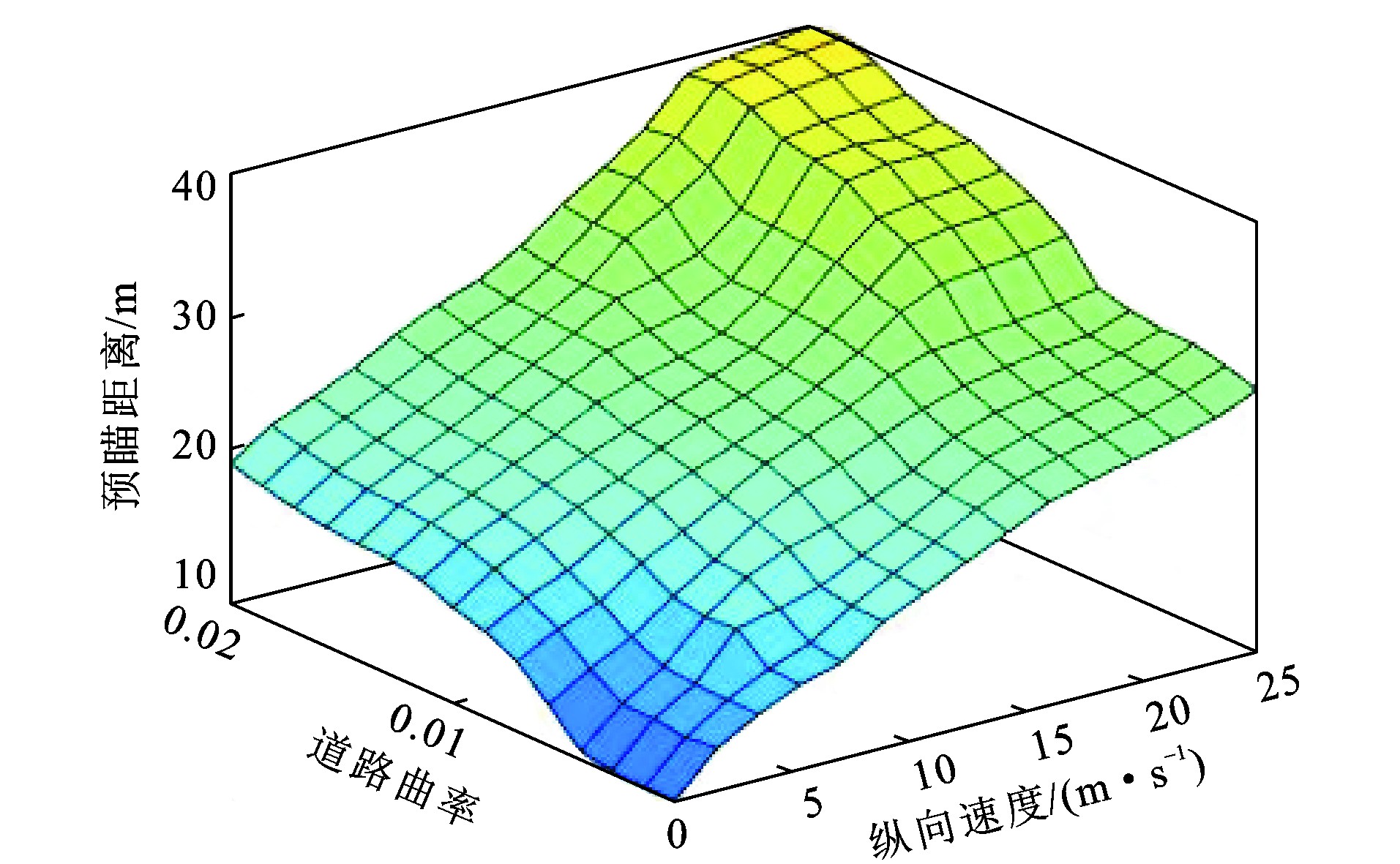
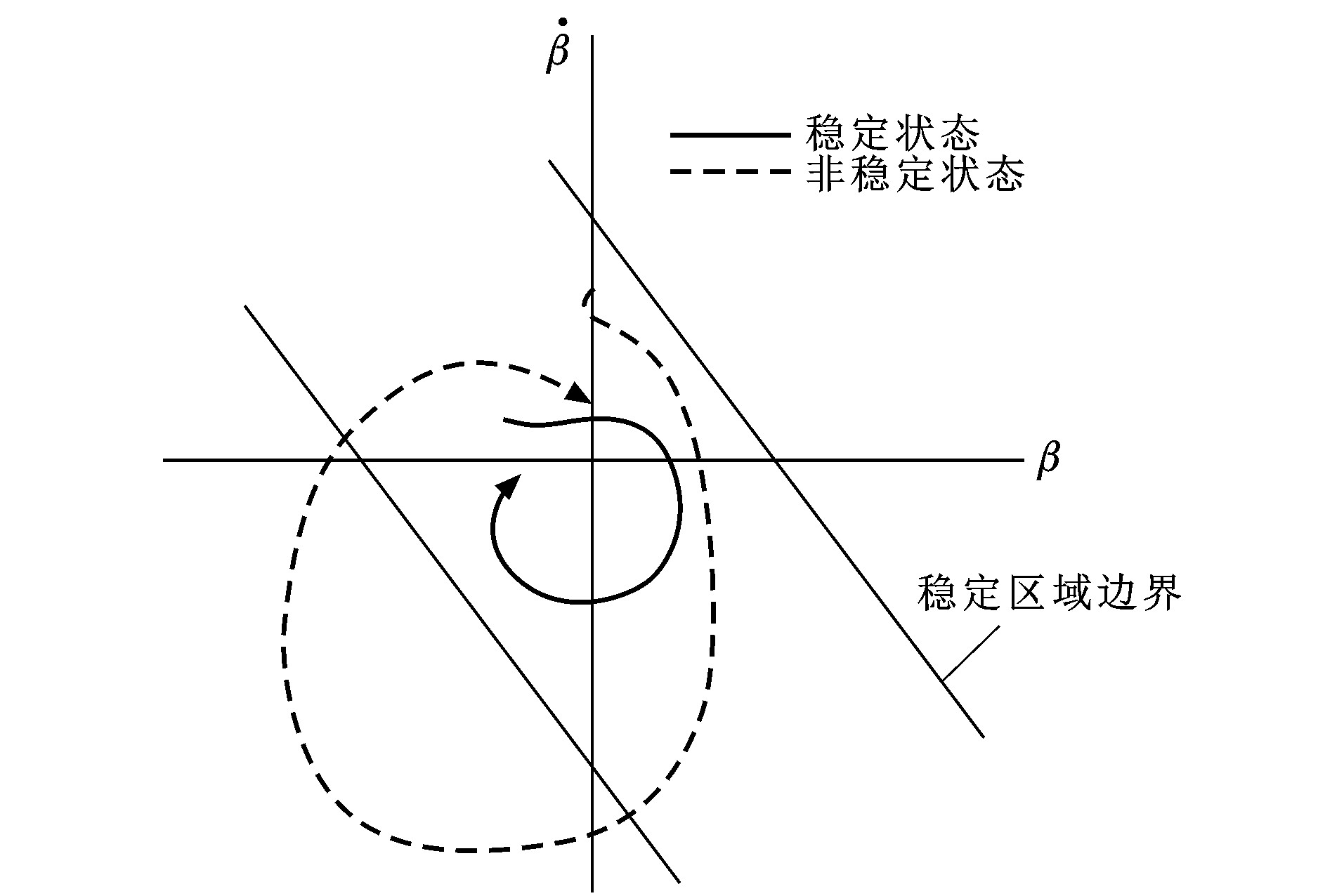
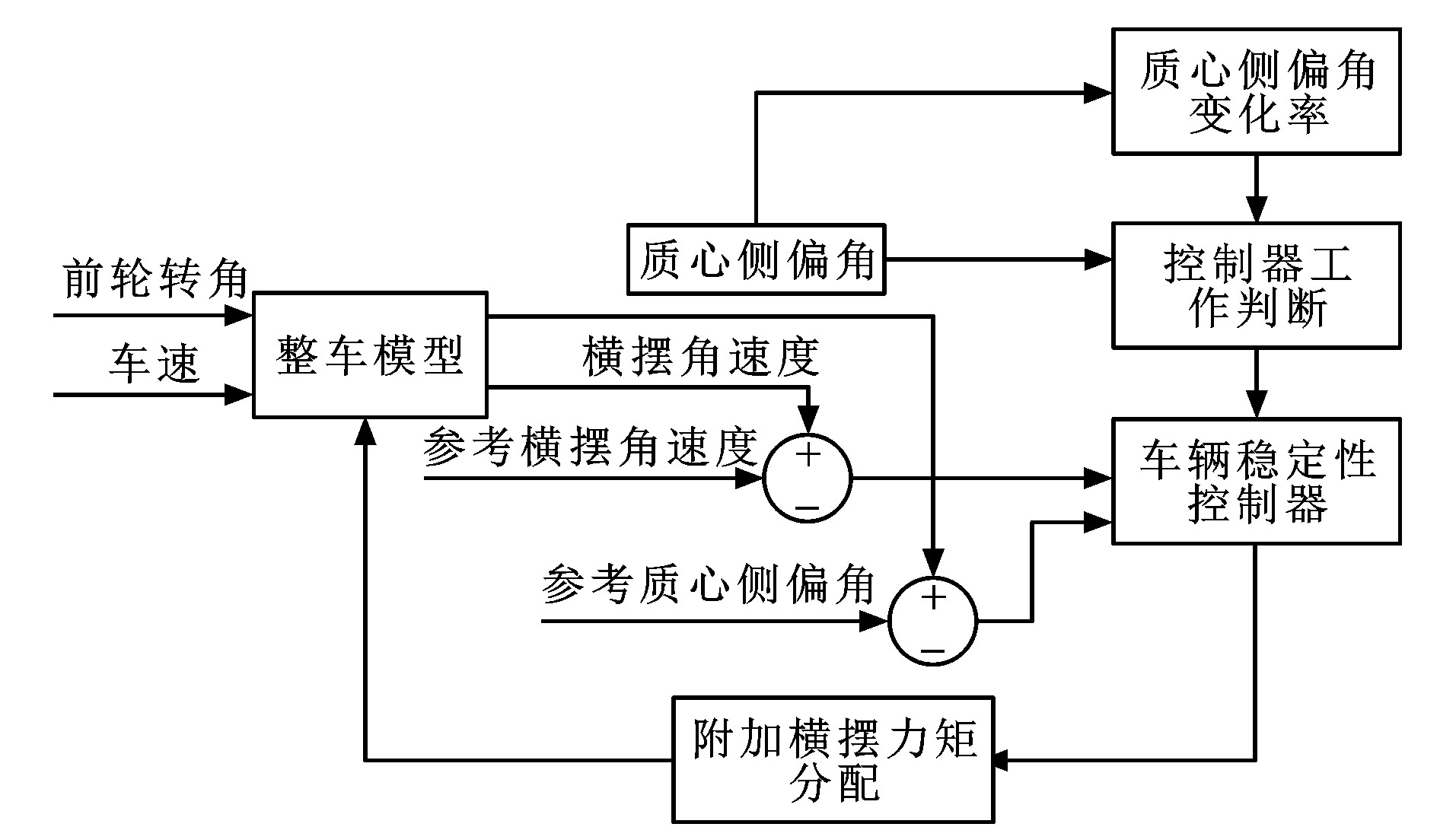
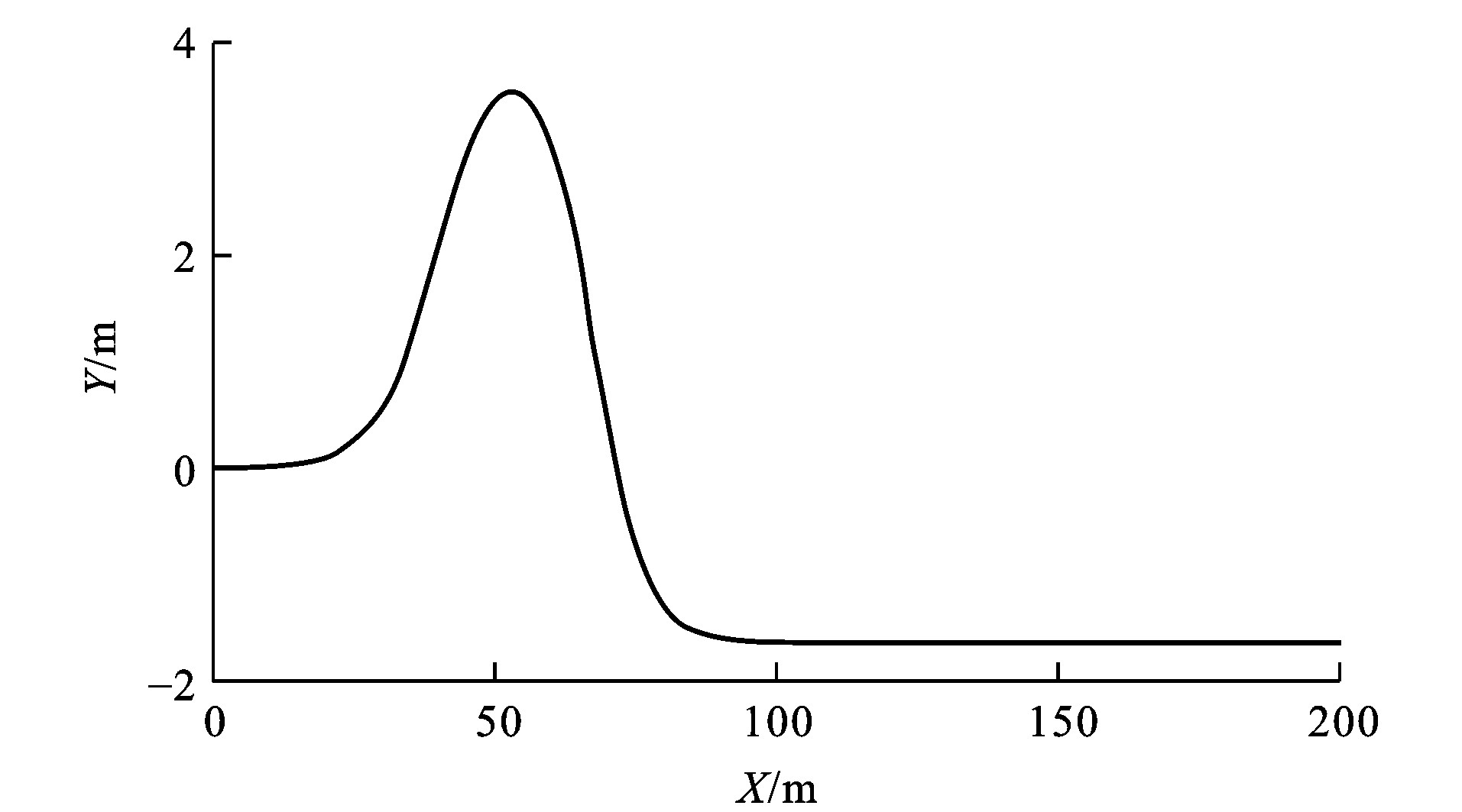
提出了一种纵横向协调控制的路径跟踪控制方法; 建立了车辆预瞄误差模型和考虑路面地形的高速车辆等效动力学模型, 以此引入道路曲率地形因素; 基于模糊规则设计了预瞄距离发生器, 解决预瞄误差模型中固定预瞄距离的问题; 建立了预测时域与道路曲率的函数关系, 运用模型预测控制算法求解前轮转角, 从而建立路径跟踪控制器; 运用指数模型表示车辆期望车速, 设计了比例积分微分纵向控制器控制车速以改善路径跟踪精度; 运用质心侧偏角相平面图表征车辆稳定性特征, 设计比例积分微分稳定性控制器以改善车辆稳定性。研究结果表明: 提出的控制方法能在不同附着系数路面上对车辆跟踪性能进行优化, 在干燥沥青路面以车速90 km·h
-1
行驶时, 与只运用模型预测控制算法进行路径跟踪控制的车辆相比, 最大横向误差可减少33%;在潮湿沥青路面以车速70 km·h
-1
行驶时, 与只运用模型预测控制算法进行路径跟踪控制的车辆相比, 最大横向误差可减少30%;在冰雪路面以车速55 km·h
-1
行驶时, 与只运用模型预测控制算法进行路径跟踪控制的车辆相比, 最大横向误差可减少16%。可见, 所提出的控制方法能有效改善路径跟踪精度。
更多>
2020, 20(2): 205-218.
doi:
10.19818/j.cnki.1671-1637.2020.02.017
摘要
(
2692
)
HTML
(
1074
)
PDF (9284KB)
(
570
)
引用
(
)
具有输入时滞的二轮自平衡车自适应滑模控制
薛晗
,
邵哲平
,
方琼林
,
马峰
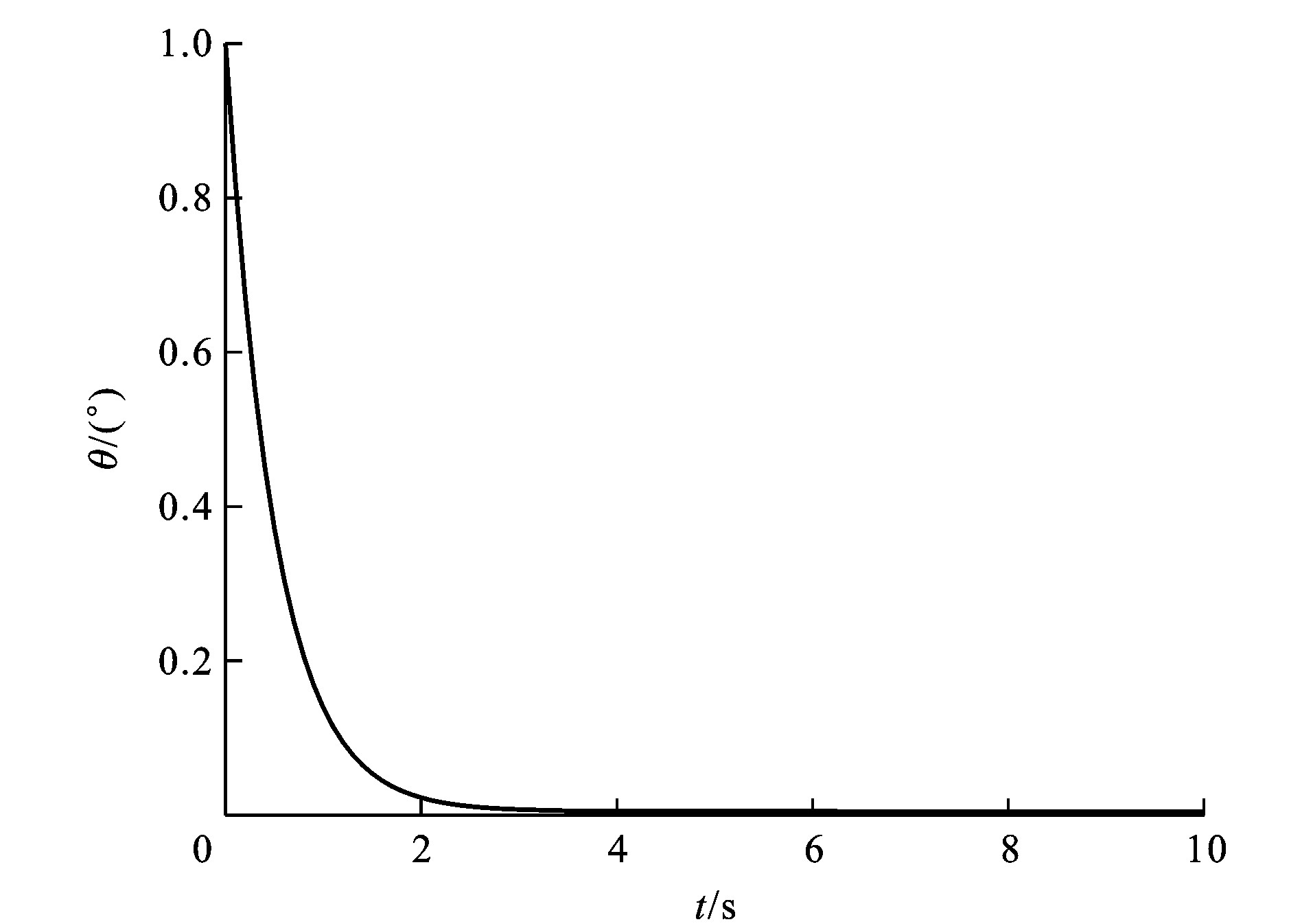
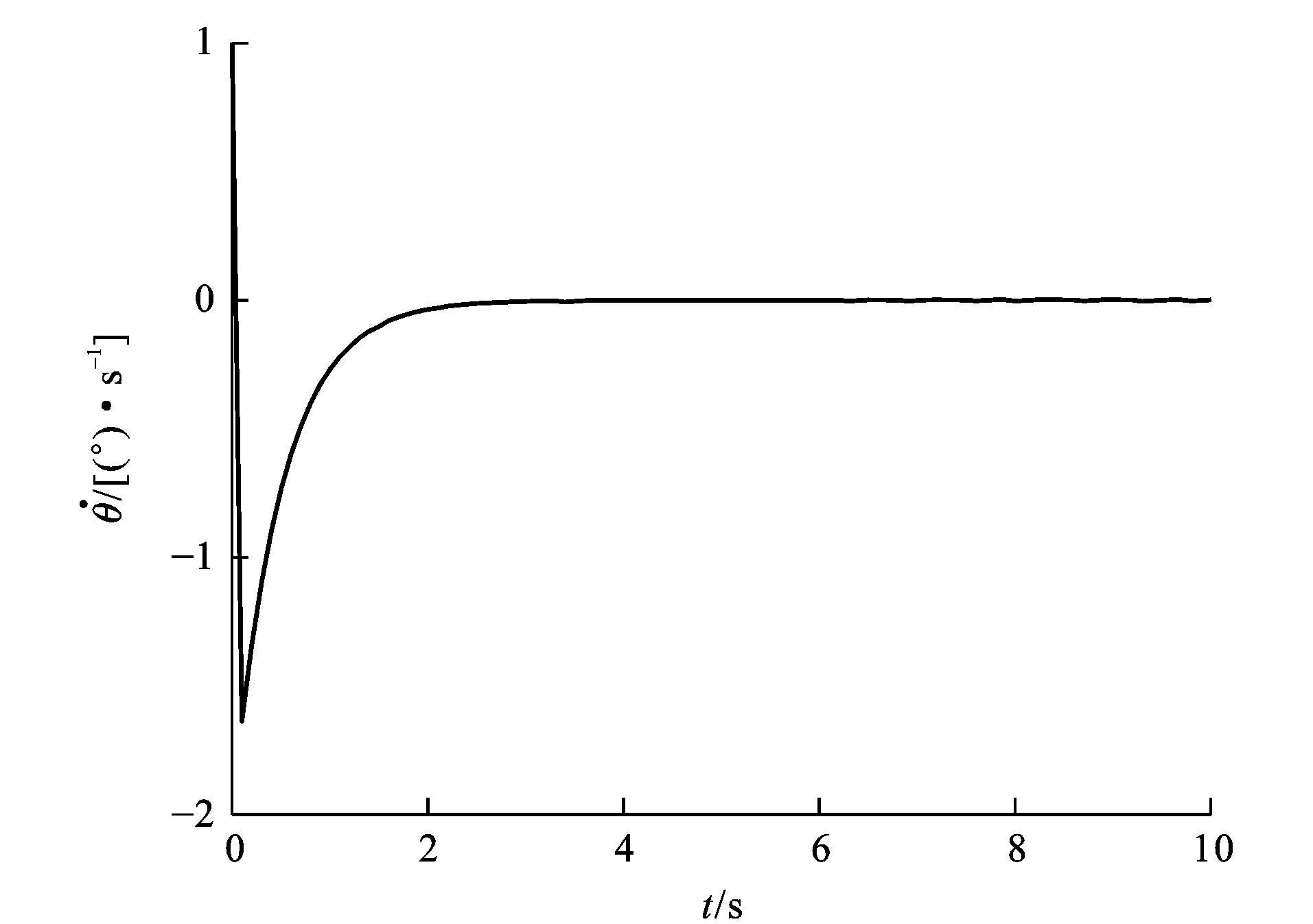
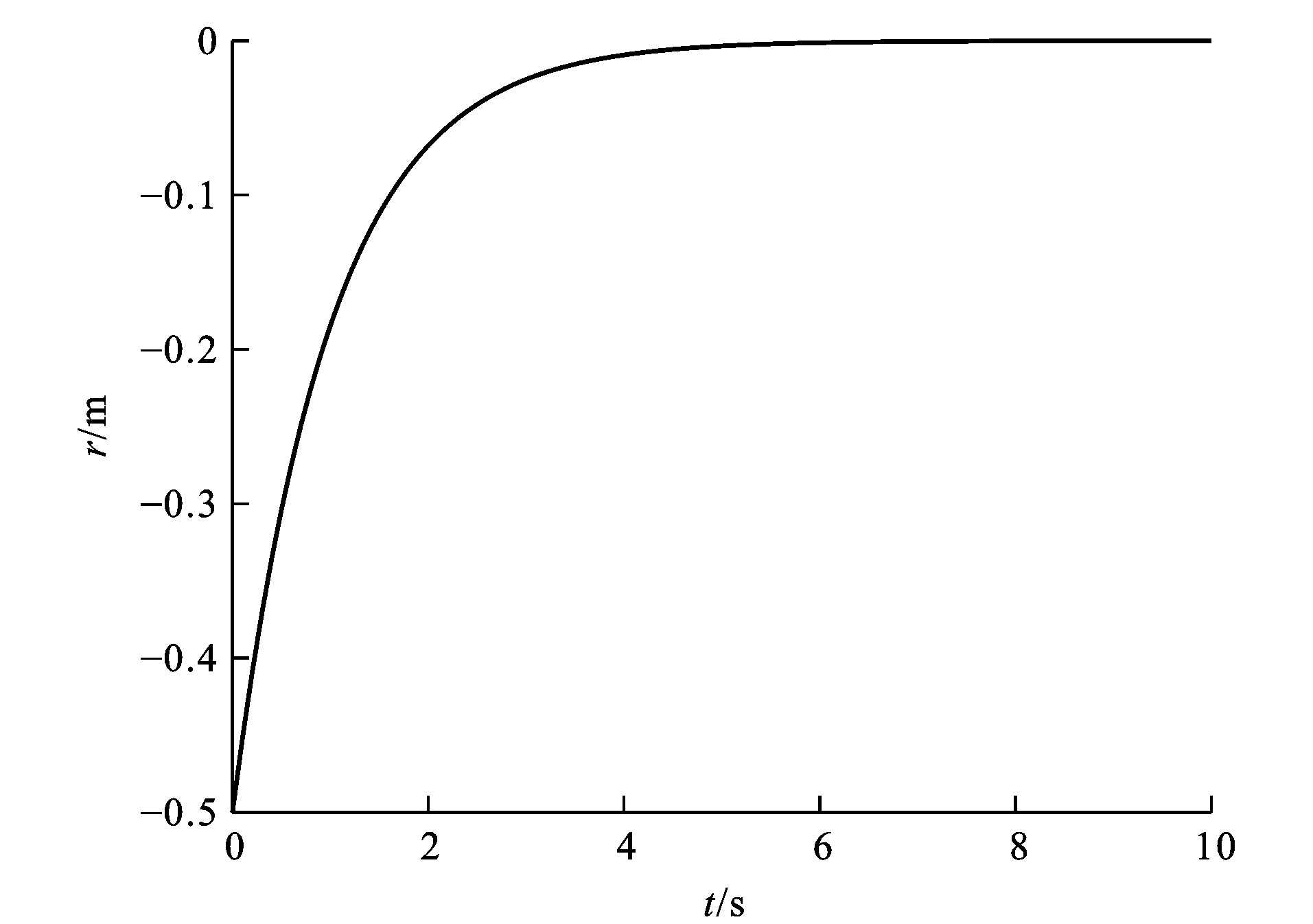
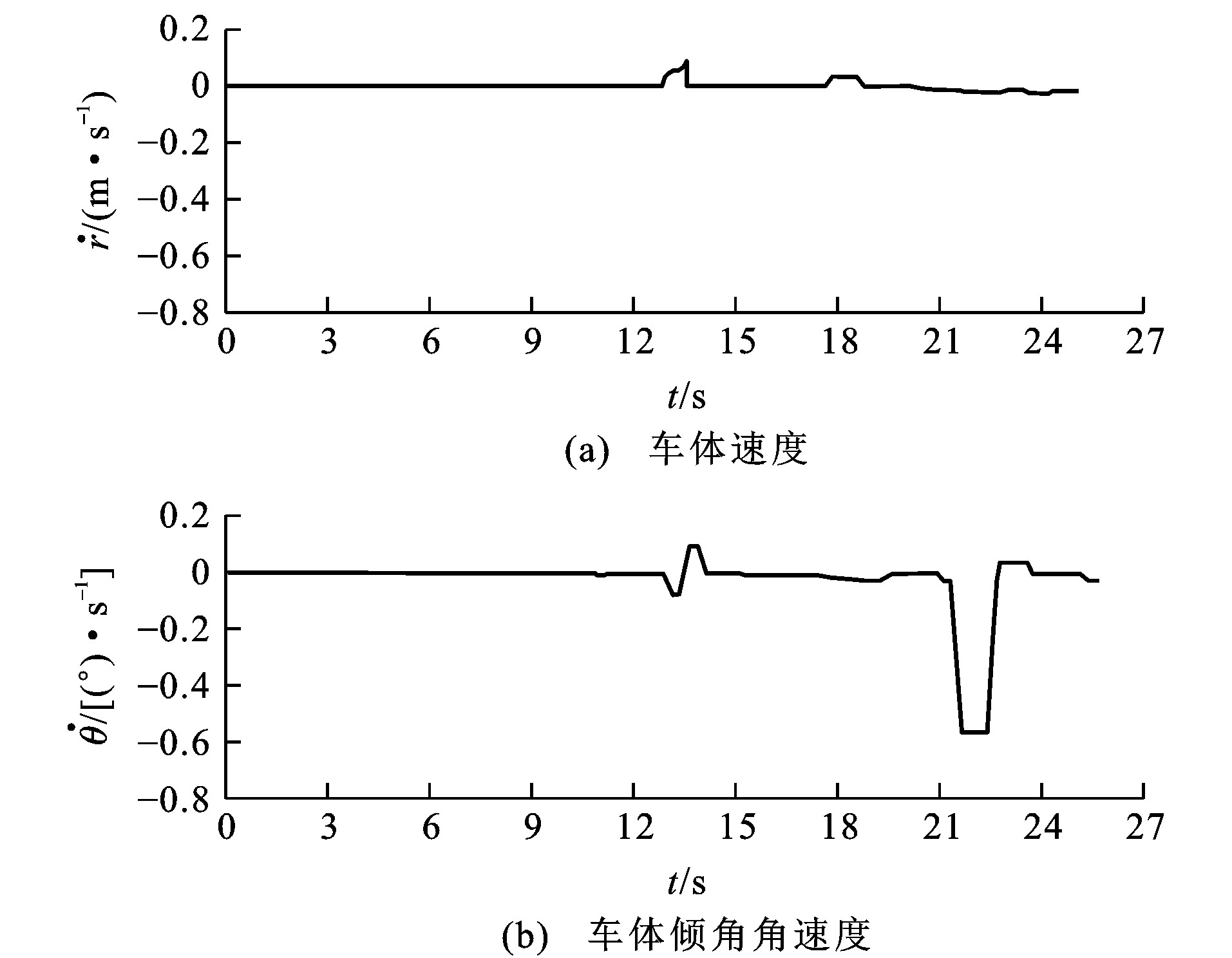
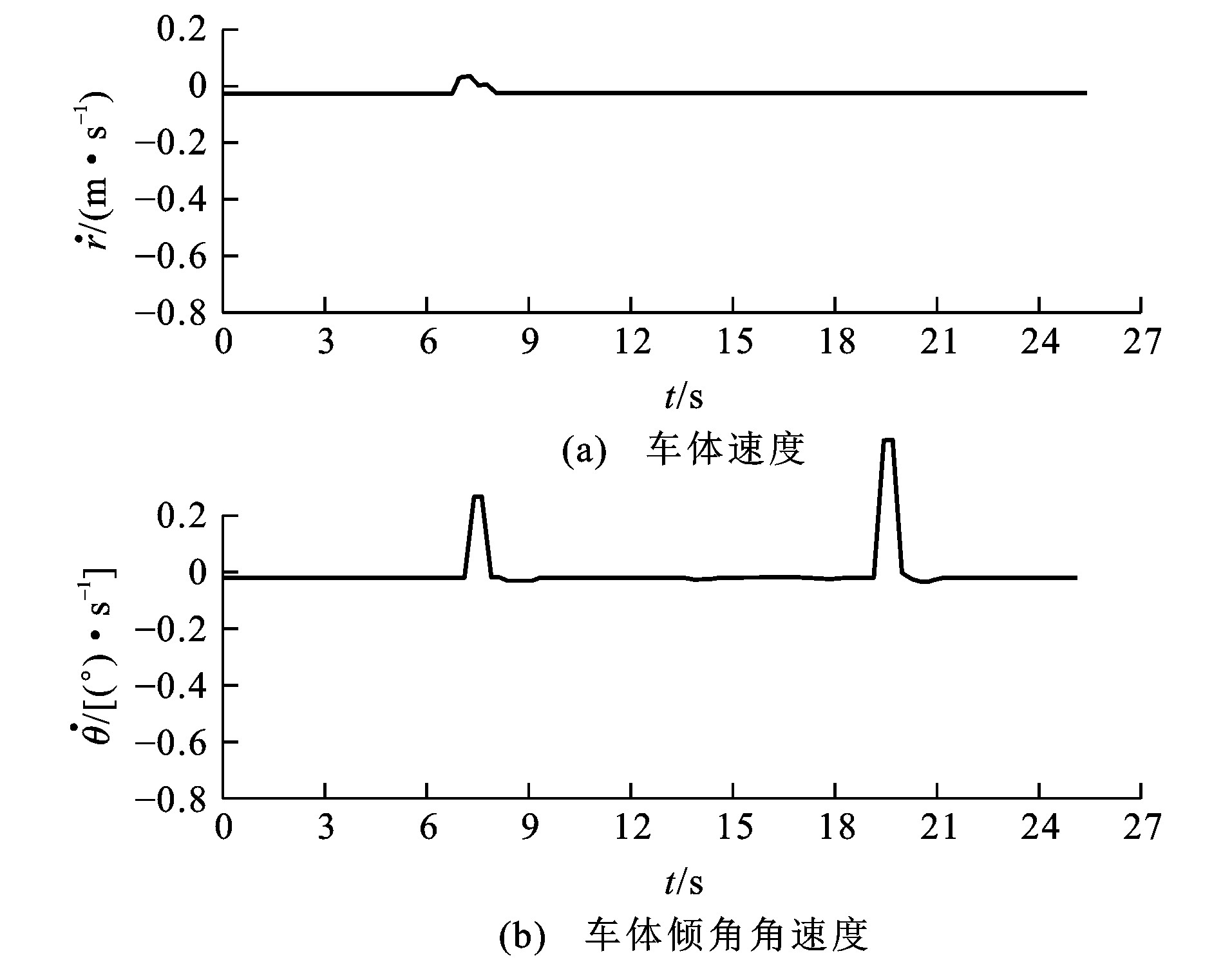
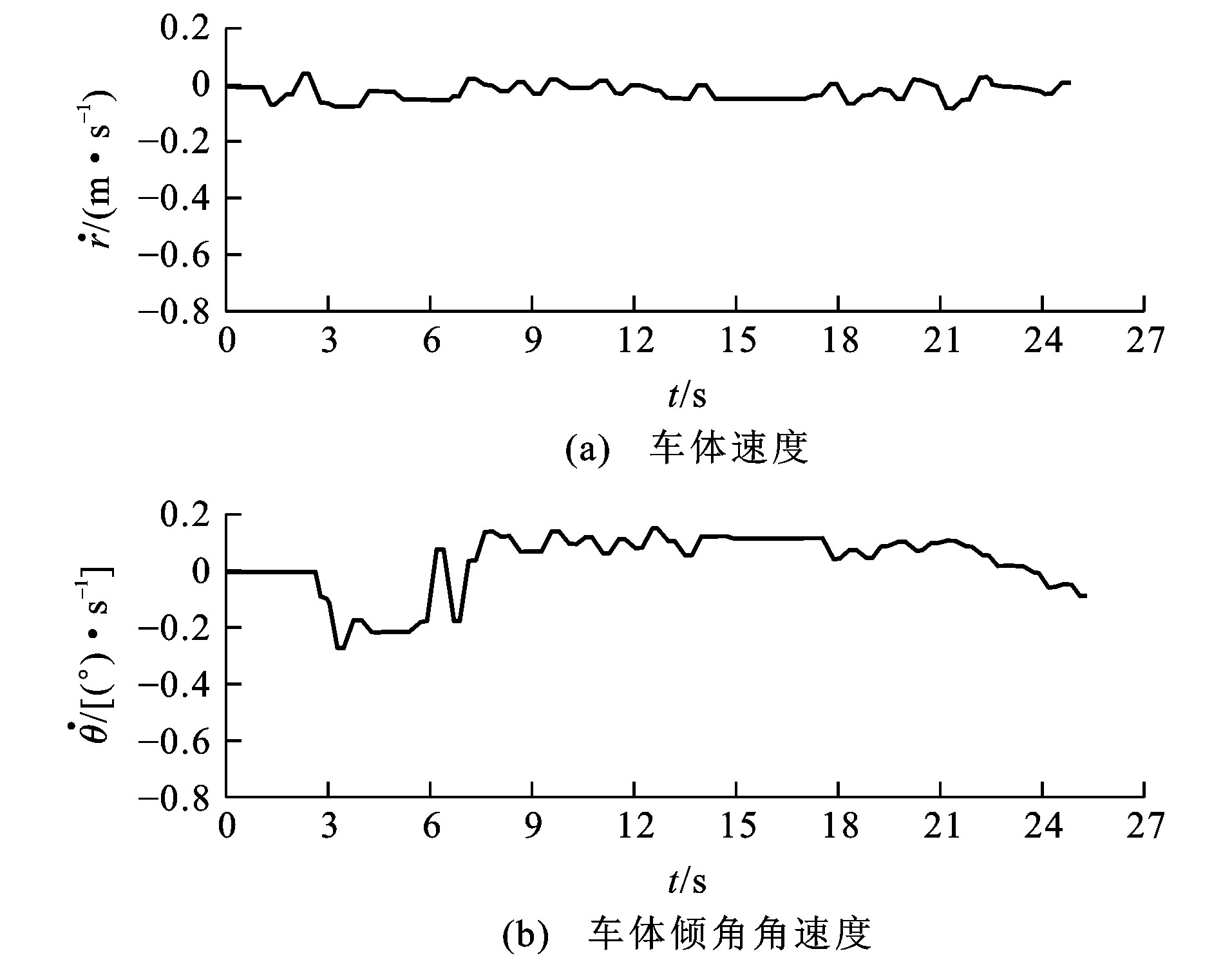
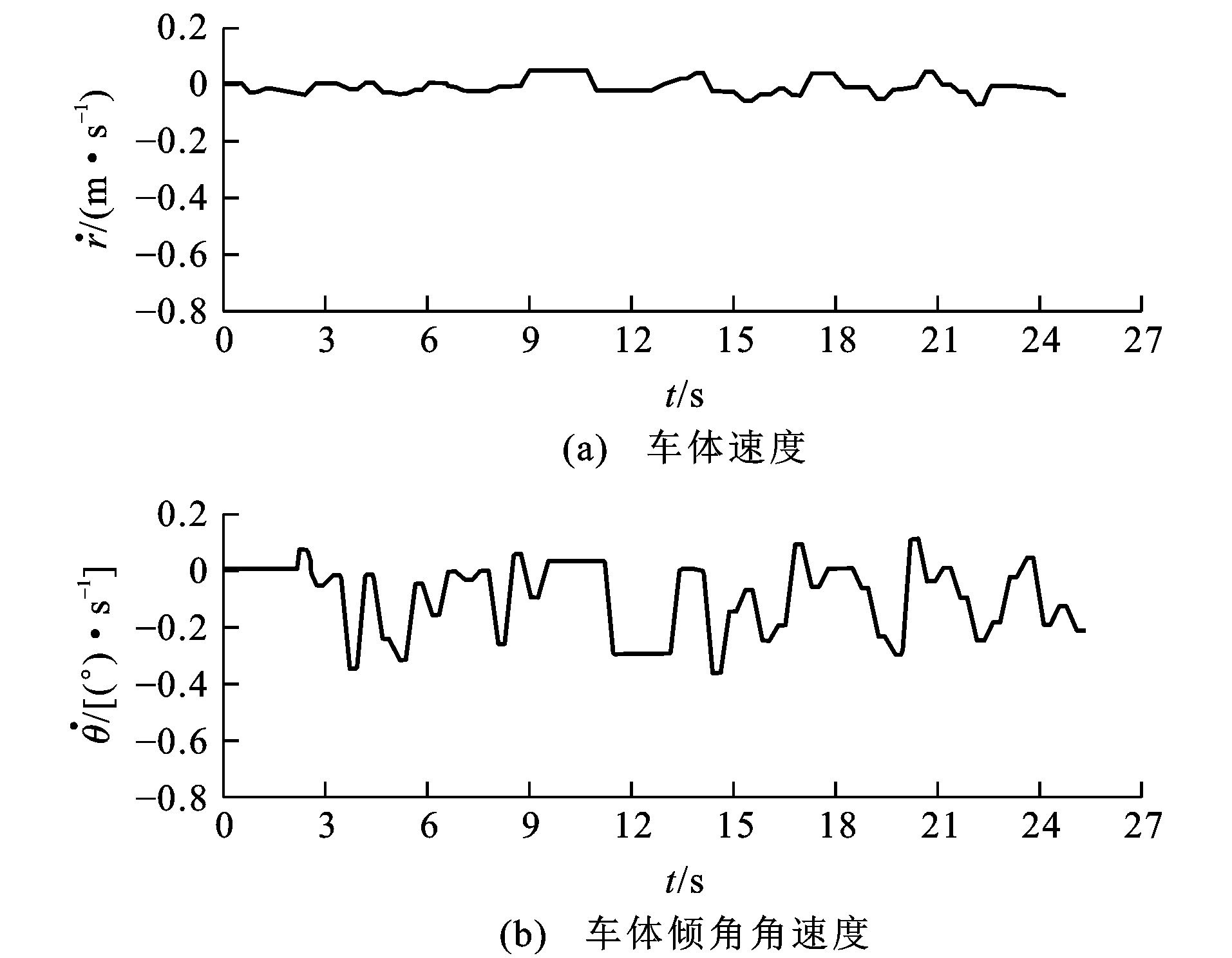
摘要:
对具有输入时滞的二轮自平衡车系统, 设计了一种自适应滑模控制算法; 采用拉格朗日函数建立二轮自平衡车系统的动力学数学模型, 并在系统模型中考虑实际中存在输入时滞, 以及在处理输入时滞时所引入的未知扰动; 对变换后的输入矩阵做奇异值分解, 进一步设计了对扰动参数具有自适应估计能力的自适应滑模控制器; 基于Lyapunov稳定性理论, 保证了闭环系统鲁棒渐近稳定; 试验采用陀螺仪MPU-6050以及加速度传感器构成小车姿态检测装置。分析结果表明: 当控制参数较小时, 系统的超调量较小, 然而系统的调节时间较长; 当控制参数较大时, 系统产生了较明显的超调量, 然而系统的调节时间缩短了; 当外加扰动较小时, 车体速度变化小于0.08 m·s
-1
, 倾角角速度变化小于0.6°·s
-1
; 当外加扰动较大时, 车体速度变化小于0.10 m·s
-1
, 倾角角速度变化小于0.8°·s
-1
; 初始倾角为5°时, 车体速度保持在0.005 m·s
-1
范围内, 倾角角速度保持在0.022°·s
-1
范围内; 初始倾角为10°时, 车体速度保持在0.007 m·s
-1
范围内, 倾角角速度保持在0.031°·s
-1
范围内。可见, 自适应滑模控制算法能在引入适量干扰和不同初始车体倾角的情况下, 使小车自主调整并迅速恢复稳定状态。
更多>
2020, 20(2): 219-228.
doi:
10.19818/j.cnki.1671-1637.2020.02.018
摘要
(
1712
)
HTML
(
381
)
PDF (2351KB)
(
408
)
引用
(
)
手动-自动驾驶混合交通流元胞传输模型
秦严严
,
张健
,
陈凌志
,
李淑庆
,
何兆益
,
冉斌
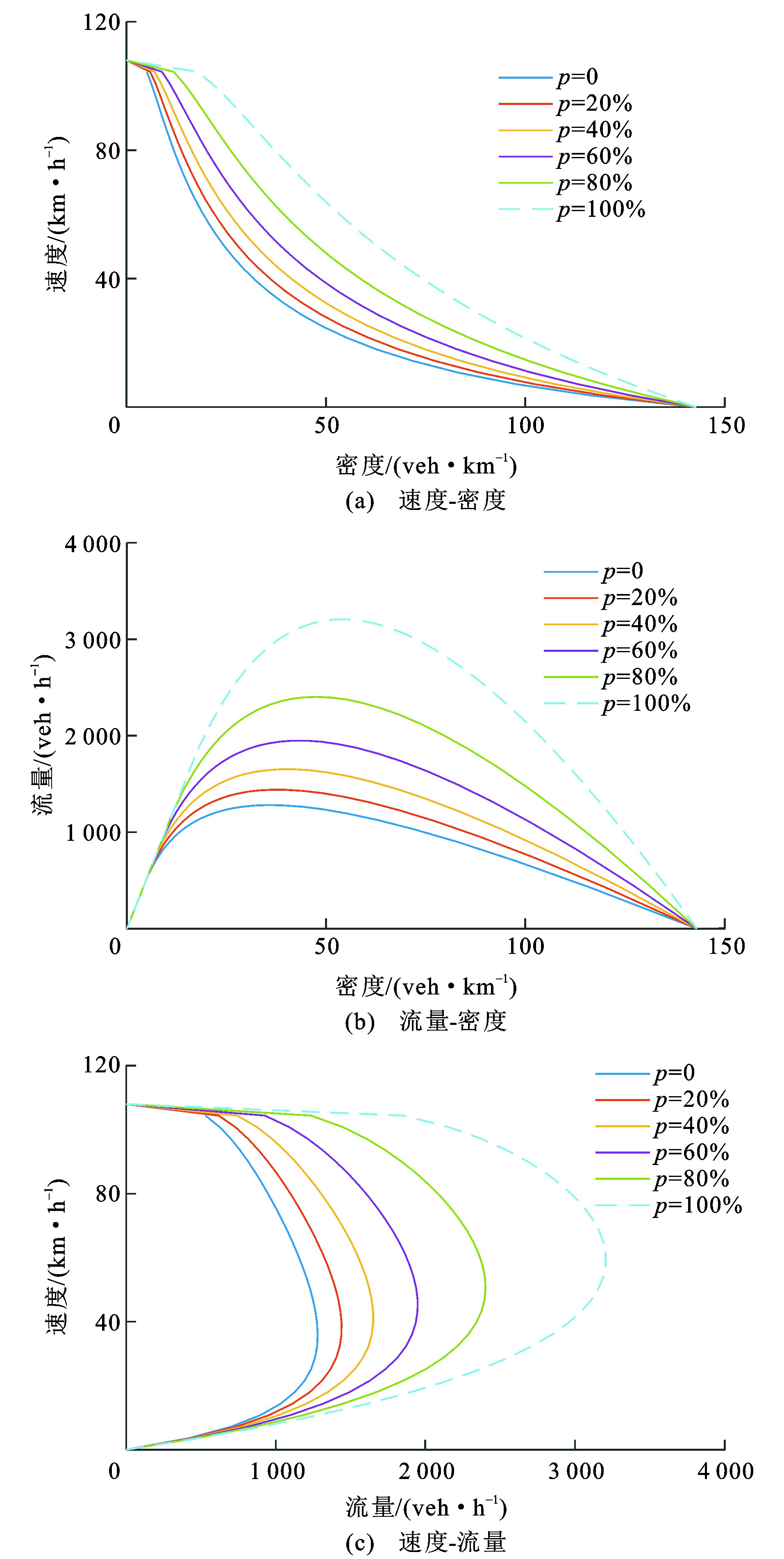
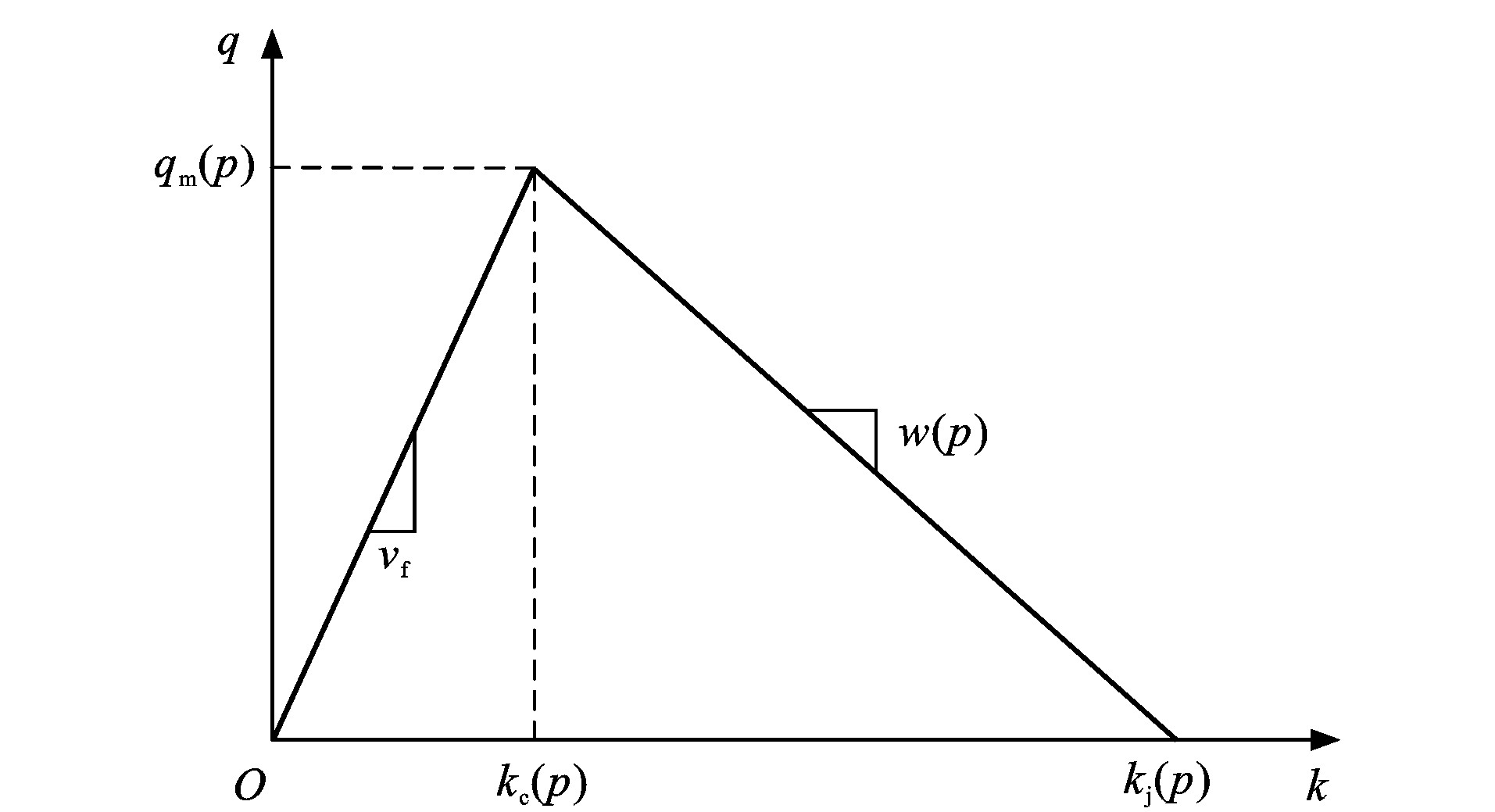
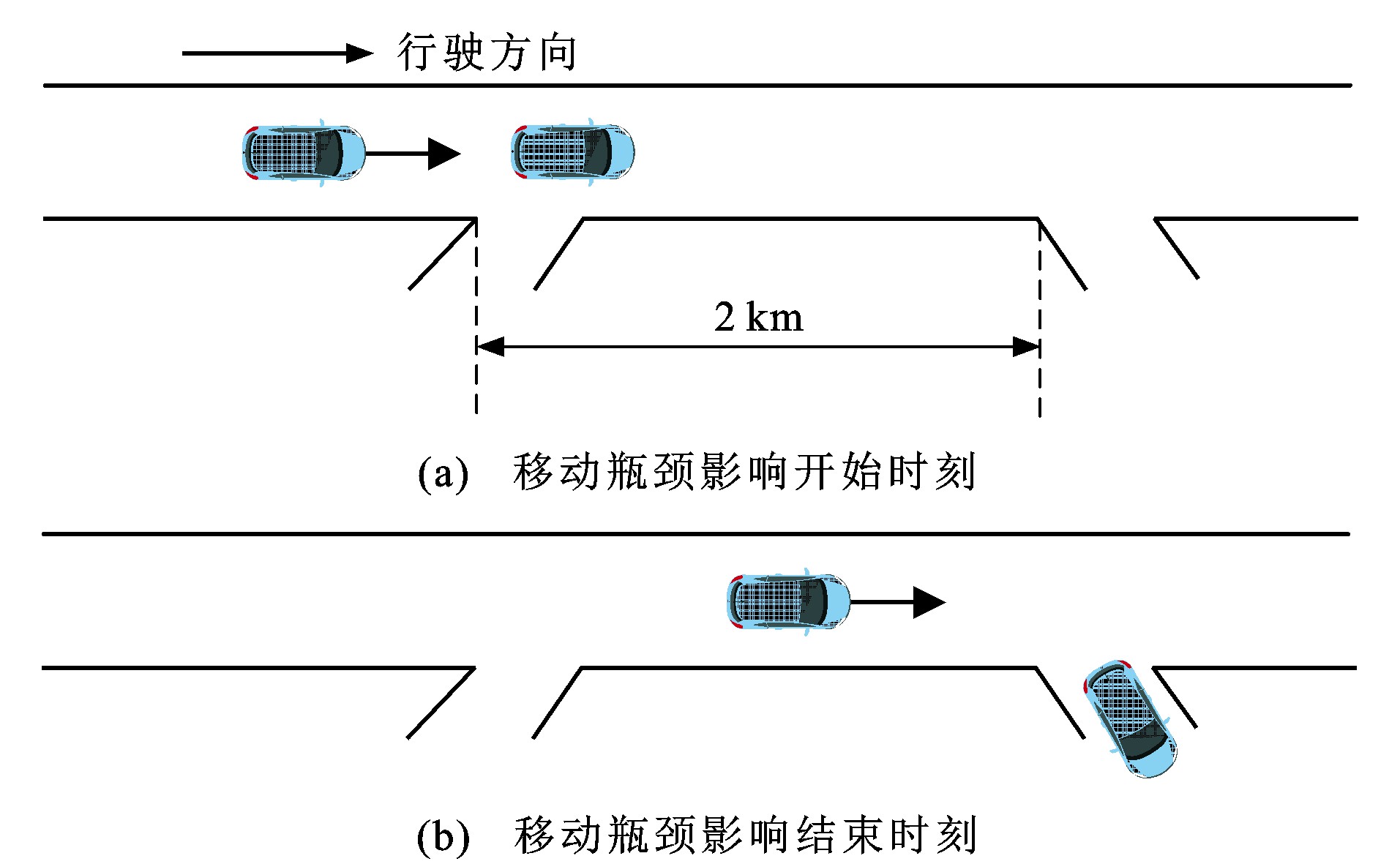
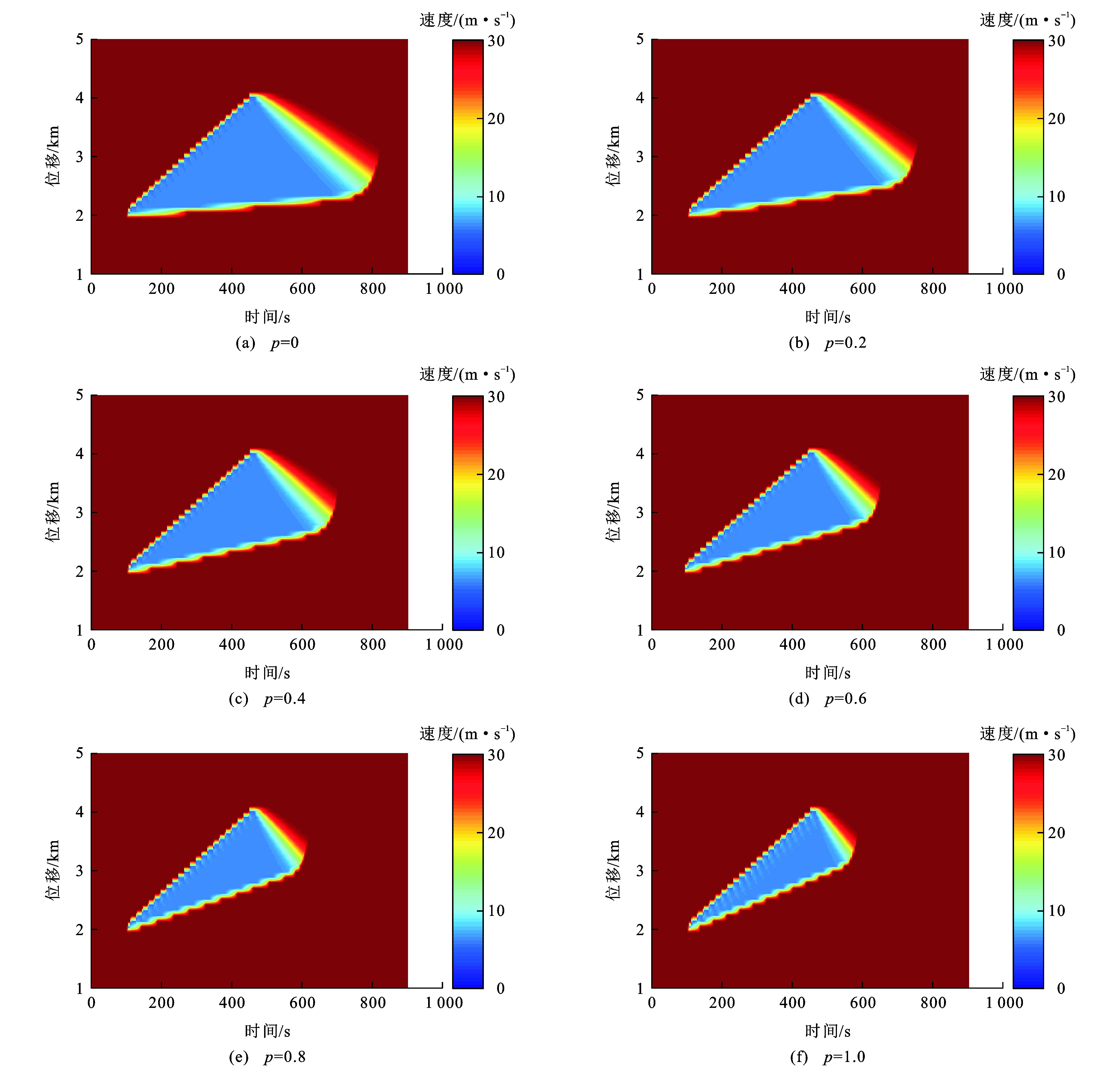
摘要:
为了分析自动驾驶车辆对交通流宏观特性的影响, 以手动驾驶车辆与自动驾驶车辆构成的混合交通流为研究对象, 提出了不同自动驾驶车辆比例下的混合交通流元胞传输模型(CTM); 应用Newell跟驰模型作为手动驾驶车辆跟驰模型, 应用PATH实验室真车测试标定的模型作为自动驾驶车辆跟驰模型; 计算了手动驾驶与自动驾驶车辆跟驰模型在均衡态的车头间距-速度函数关系式, 推导了不同自动驾驶车辆比例下的混合交通流基本图模型, 计算了混合交通流在不同自动驾驶车辆比例下的最大通行能力、最大拥挤密度以及反向波速等特征量, 依据同质交通流CTM理论建立了不同自动驾驶车辆比例下的混合交通流CTM; 选取移动瓶颈问题进行算例分析, 应用混合交通流CTM计算了不同自动驾驶车辆比例下的移动瓶颈影响时间, 应用跟驰模型对移动瓶颈问题进行微观数值仿真, 分析了混合交通流CTM计算结果与跟驰模型微观仿真结果之间的误差, 验证了混合交通流CTM的准确性。研究结果表明: 混合交通流CTM能够有效计算移动瓶颈的影响时间, 在不同自动驾驶车辆比例下, 混合交通流CTM计算结果与跟驰模型微观仿真结果的误差均在52 s以下, 相对误差均小于10%, 表明了混合交通流CTM在实际应用中的准确性; 混合交通流CTM体现了从微观到宏观的研究思路, 基于微观跟驰模型与目前逐步开展的小规模自动驾驶真车试验之间的关联性, 混合交通流CTM能够较真实地反映未来不同自动驾驶车辆比例下单车道混合交通流演化过程, 增加了模型研究的应用价值。
更多>
2020, 20(2): 229-238.
doi:
10.19818/j.cnki.1671-1637.2020.02.019
摘要
(
3569
)
HTML
(
886
)
PDF (4815KB)
(
647
)
引用
(
)
文章推荐
更多>
低空无人机物流公众接受度研究综述
智能飞行汽车:驱动未来城市空中交通
无人驾驶航空器自主探测与避让技术研究综述
铁道车辆齿轮箱动力学与故障诊断研究综述
FMEA/FMECA在船舶工程中的应用综述
关键词检索
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
期刊检索
2026年
2025年
2024年
2023年
2022年
2021年
2020年
2019年
2018年
2017年
2016年
2015年
2014年
2013年
2012年
2011年
2010年
2009年
2008年
2007年
2006年
2005年
2004年
2003年
2002年
2001年
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
期刊动态
更多>
翟婉明院士莅临《交通运输工程学报》轨道交通方向青年编委会会议,指导办刊工作
《交通运输工程学报》“大宗固废在交通运输工程中的资源化利用”专刊征稿
《交通运输工程学报》“航空运输业与航空制造业融合下的前沿技术、装备与系统”专刊征稿
《交通运输工程学报》“水路交通智能技术与装备”专刊征稿
学报动态
《交通运输工程学报》“多年冻土区交通基础设施韧性提升技术” 专刊征稿启事
作者园地
更多>
关于文章中的中国地图
中图分类号
友情链接
更多>
《工程索引》(Ei Compendex)
《斯高帕斯数据库》(Scopus)
交通运输工程学报(CNKI)
长安大学学术期刊管理中心
交通运输工程学报(英文)
中国公路学报
×
Close
导出文件
文件类别
RIS(可直接使用Endnote编辑器进行编辑)
Bib(可直接使用Latex编辑器进行编辑)
Txt
引用内容
引文——仅导出文章的Citation信息
引文和摘要——导出文章的Citation信息和文章摘要信息
×
Close
引用参考文献格式