首页
期刊简介
编委会
期刊在线
网络首发
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
出版伦理
AI使用声明
同行评审及出版流程
投稿模板
版权转让协议
期刊订阅
联系我们
编辑团队
联系方式
English
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
首页
期刊简介
编委会
期刊在线
网络首发
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
出版伦理
AI使用声明
同行评审及出版流程
投稿模板
版权转让协议
期刊订阅
联系我们
编辑团队
联系方式
English
留言板
尊敬的读者、作者、审稿人, 关于本刊的投稿、审稿、编辑和出版的任何问题, 您可以本页添加留言。我们将尽快给您答复。谢谢您的支持!
姓名
邮箱
手机号码
标题
留言内容
验证码
用户中心
作者投稿
作者查询
专家审稿
编辑办公
期刊信息
(2001年创刊 月刊 )
主 管:
中华人民共和国教育部
主 办:
长安大学
编辑出版:
《交通运输工程学报》编辑部
主 编:
沙爱民
地 址:
陕西省 西安市 南二环 路中段 长安大学《交通运输工程学报》编辑部
邮 编:
710064
电 话:
029-82334388
邮 箱:
jygc@chd.edu.cn
国内发行:
中国邮政集团有限公司陕西省报刊发行局
国外发行:
中国国际图书贸易集团有限公司
标准刊号:
ISSN
1671-1637
CN
61-1369/U
CODEN
JYGXAS
学报微信视频号
学报微信公众号
重要源期刊收录
更多>
《交通运输工程学报》收录信息
《铁路运输领域高质量科技期刊分级目录》T1级
《公路运输领域高质量科技期刊分级目录》T1级
美国《工程索引》(Ei Compendex)
《文摘和引文数据库》(Scopus)
日本科学技术振兴机构(JST)中国文献数据库
邮件订阅
RSS
2016年 第16卷 第6期
栏目
道路与铁道工程
载运工具运用工程
交通运输规划与管理
交通信息工程及控制
上一期
|
下一期
选择全部
显示方式:
道路与铁道工程
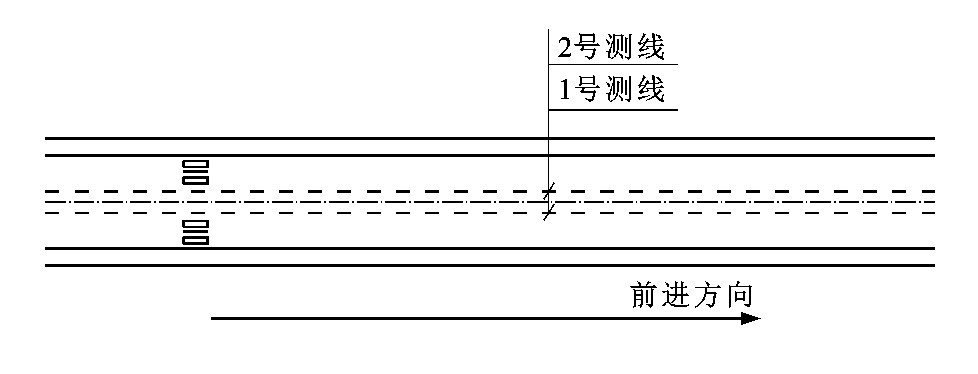
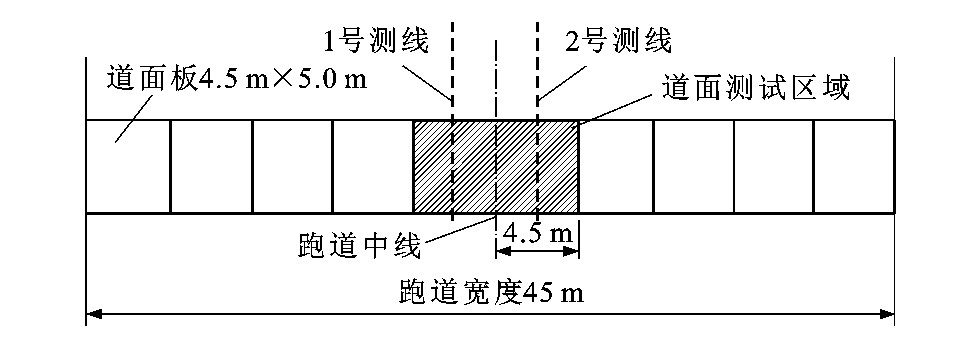
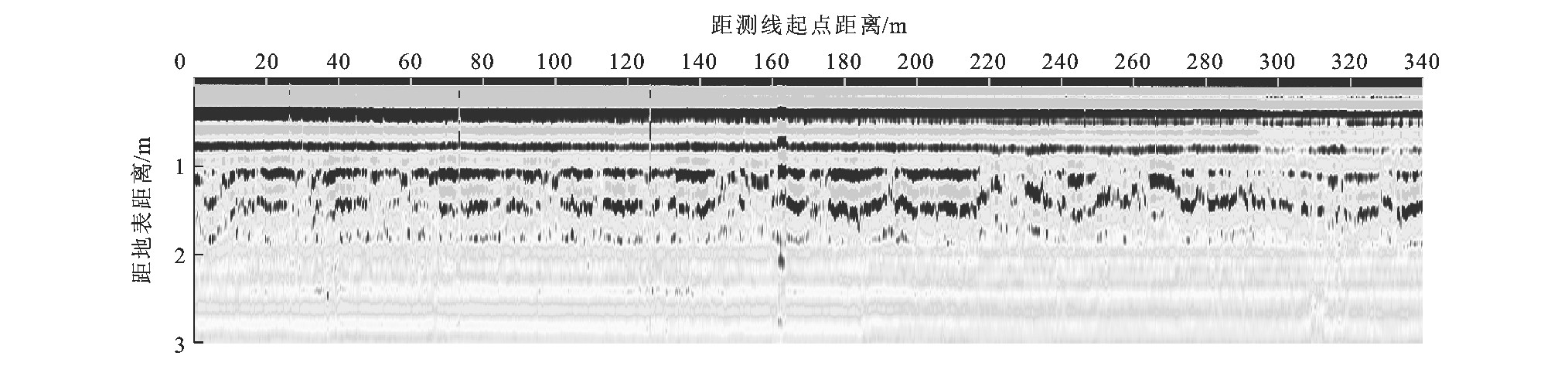
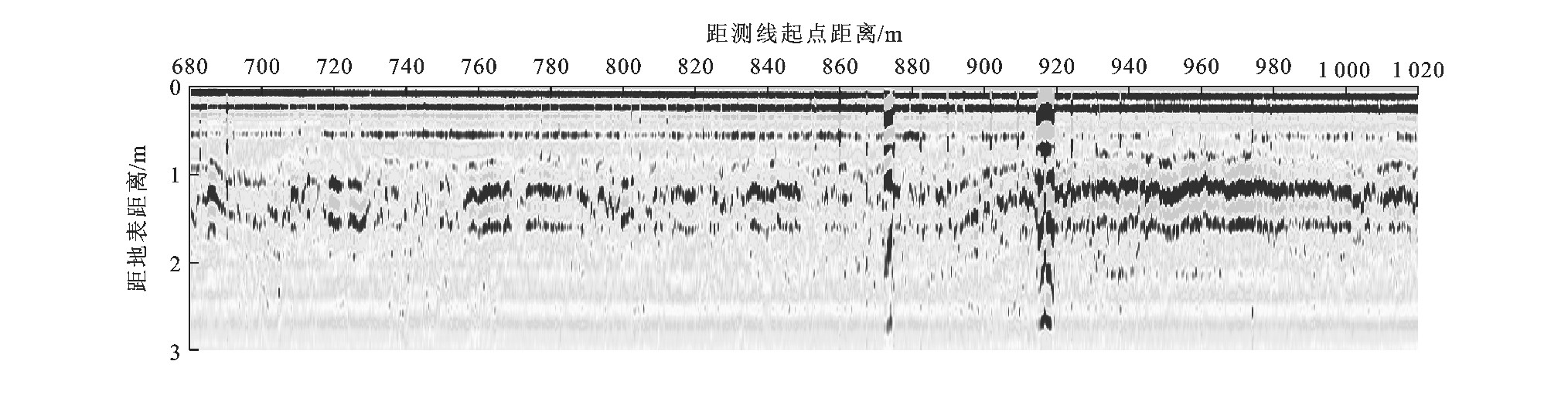
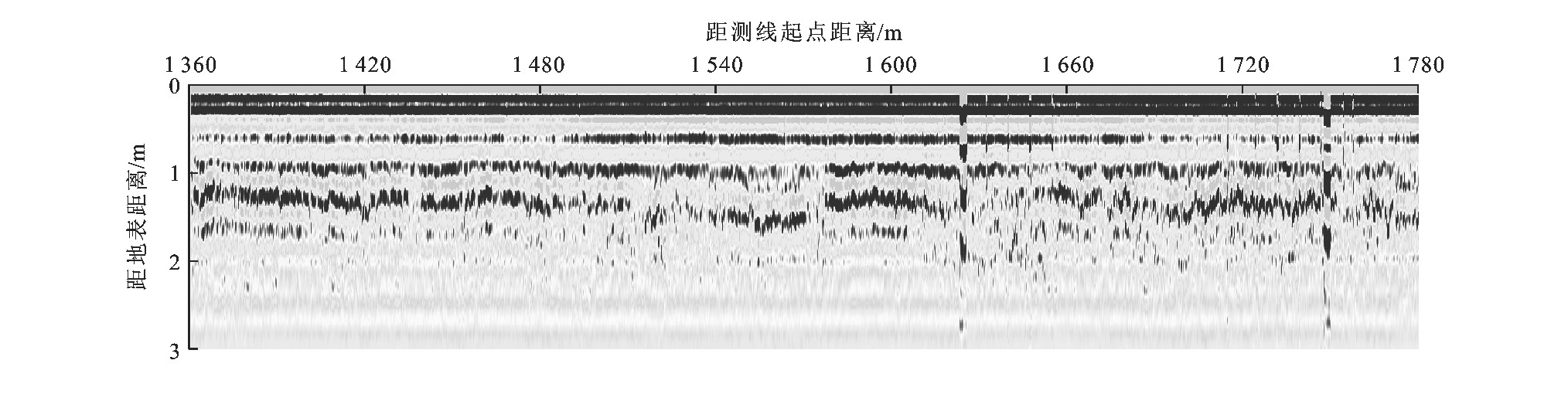
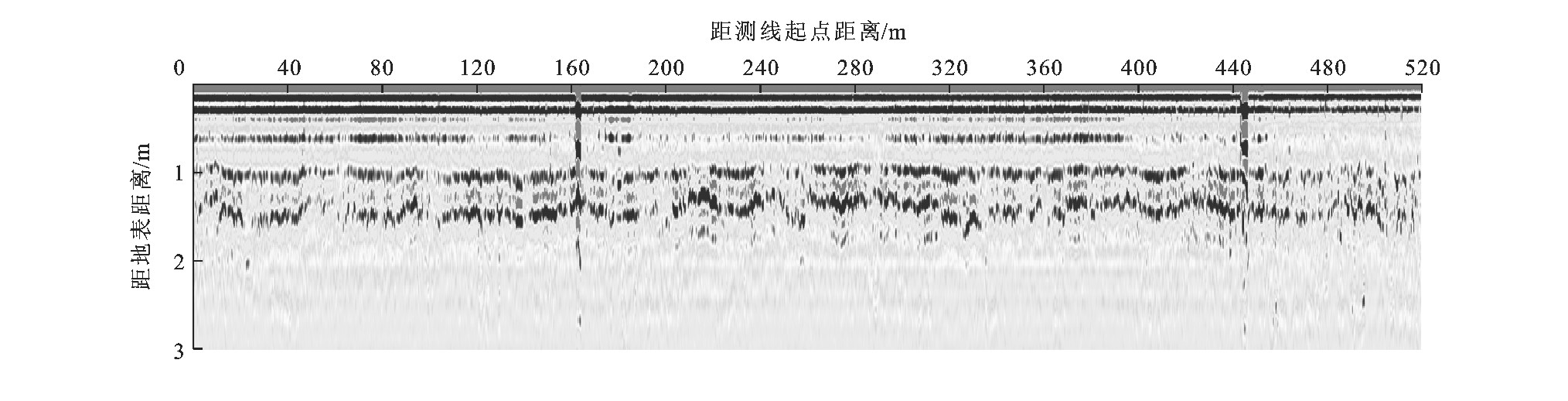
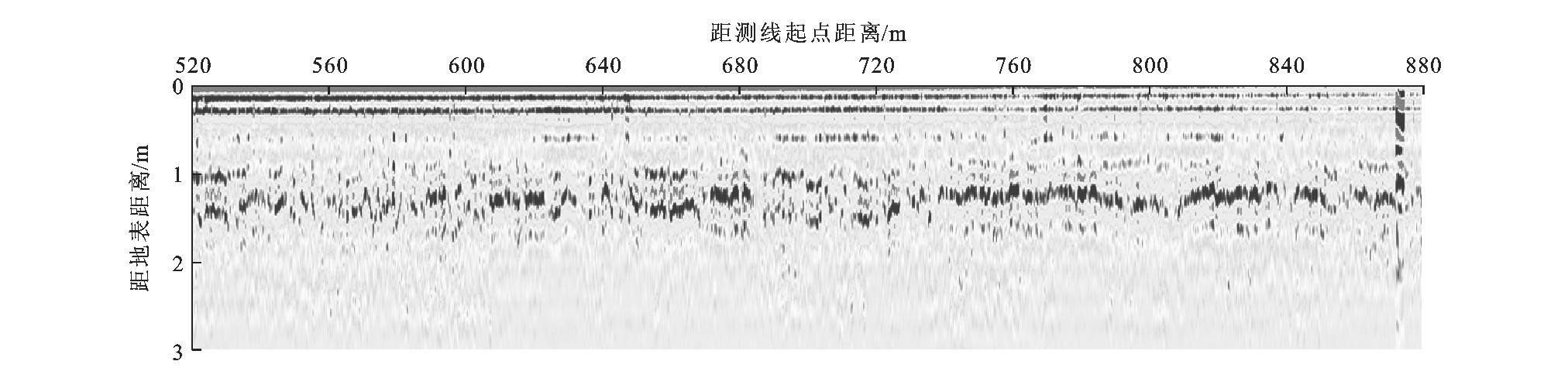
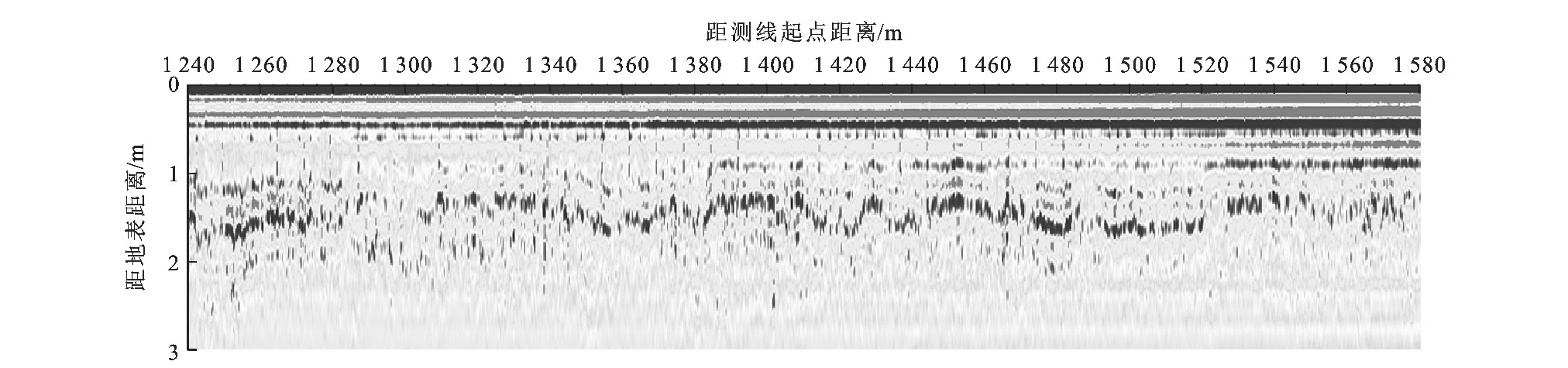
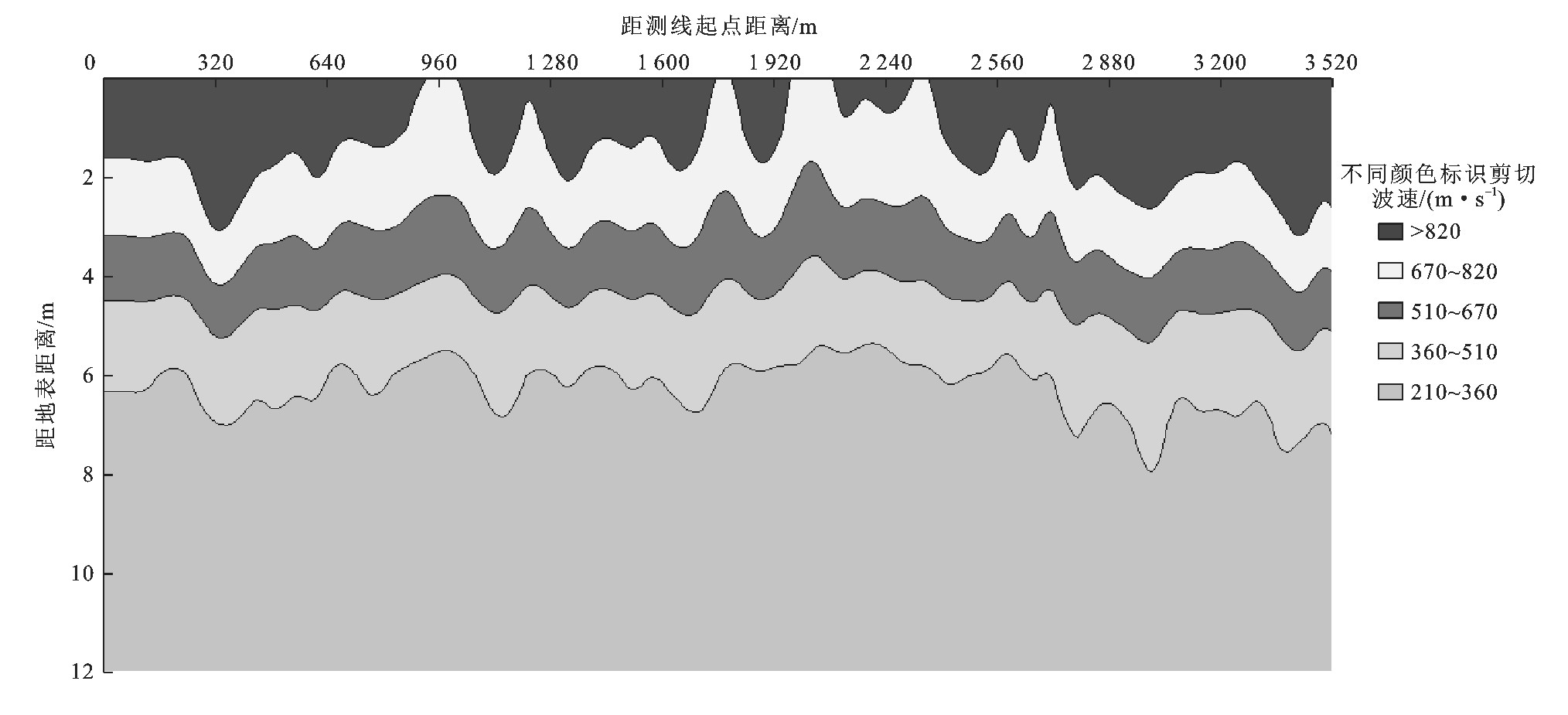
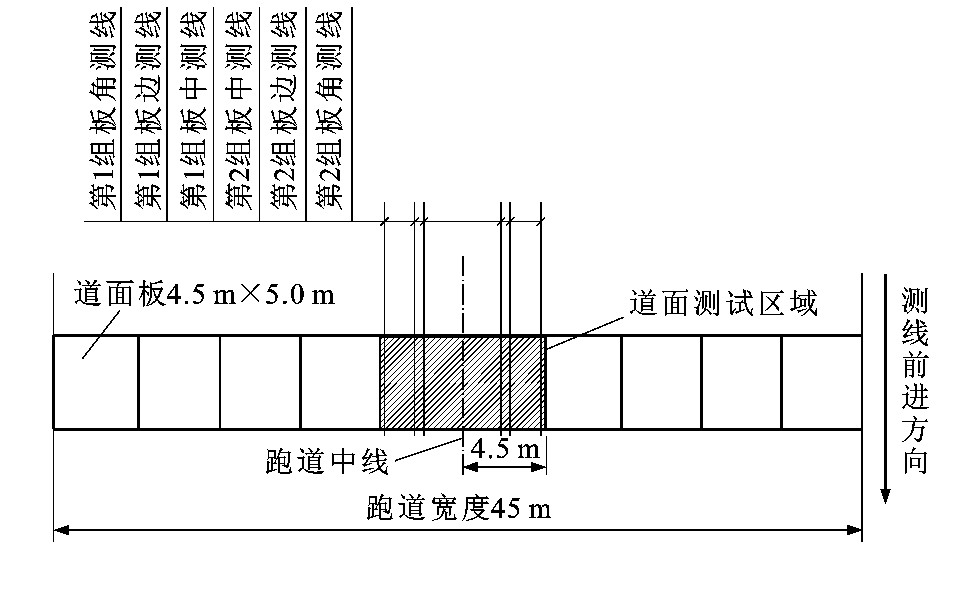
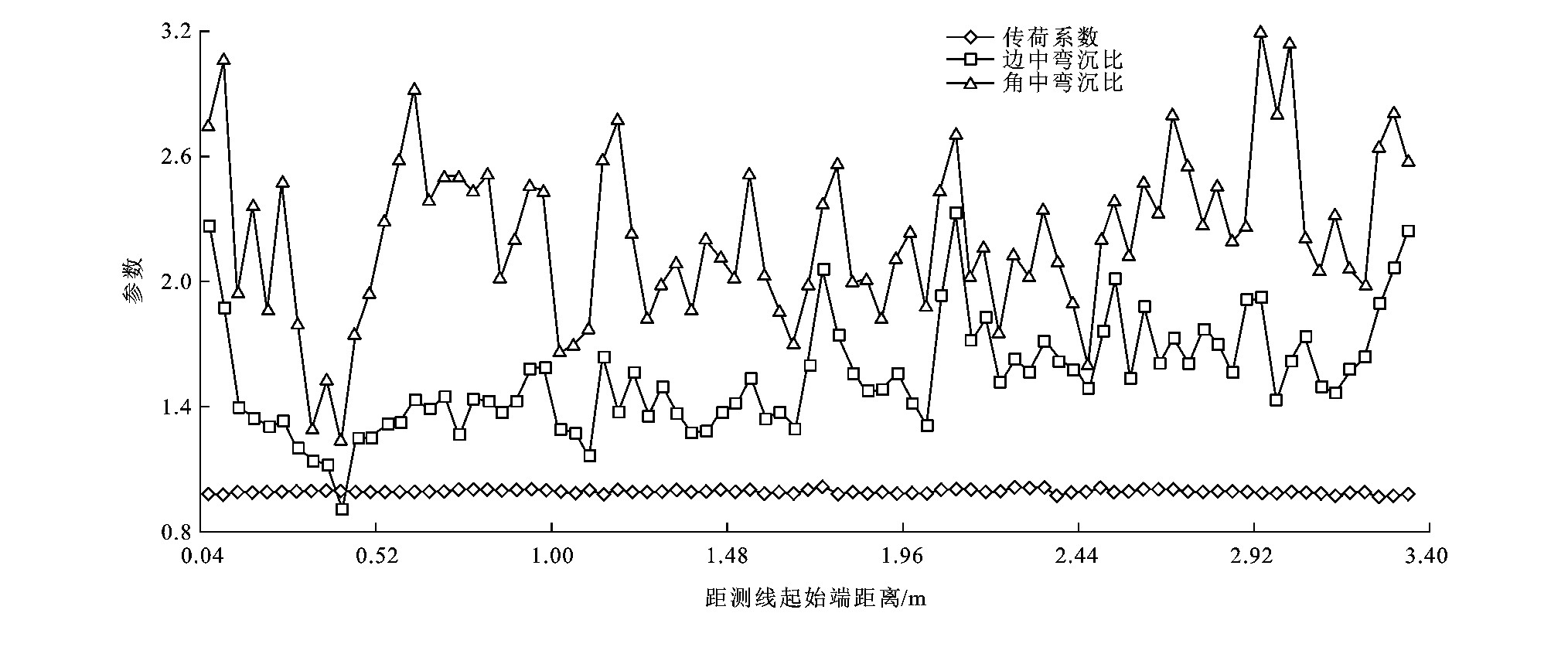
机场道面及其下部地基脱空的测试方法
张宇辉
,
张献民
摘要:
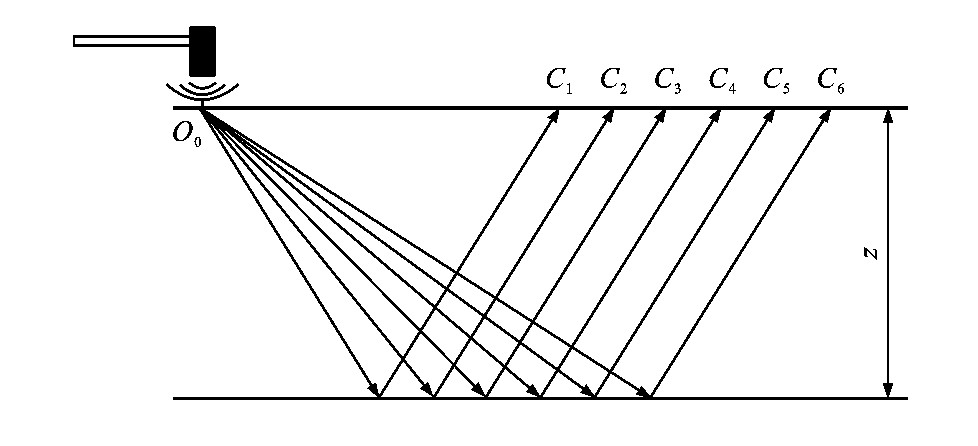
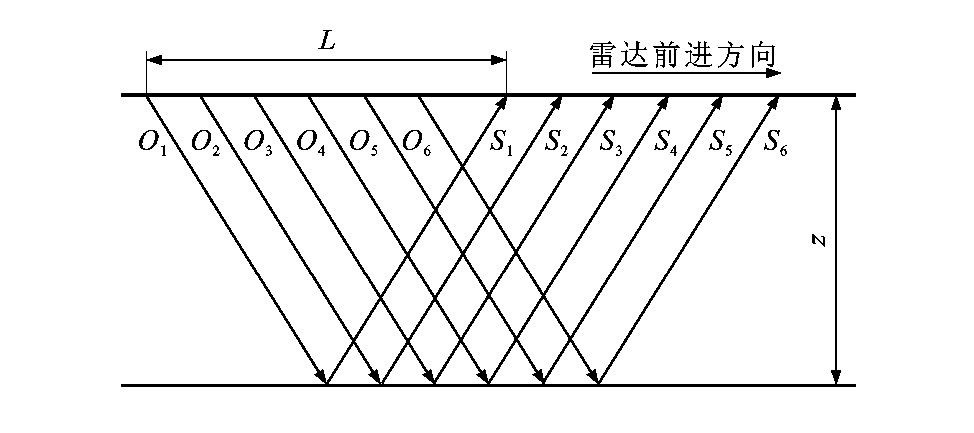
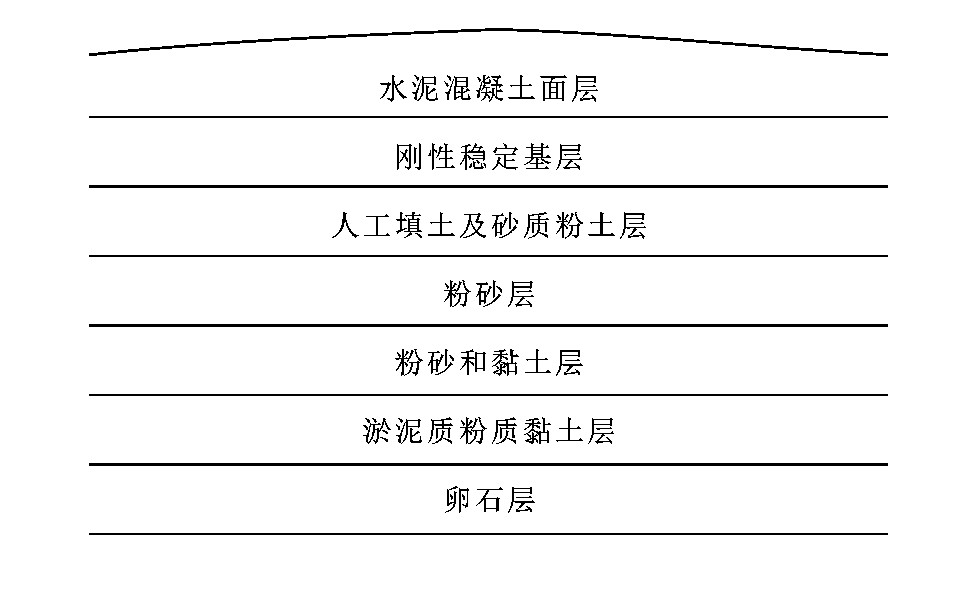
分析了机场跑道重锤式弯沉仪、探地雷达、面波与映像的测试结果, 判别了机场刚性道面板底部脱空、下部地基沉陷与地基空洞变形, 对比了不同脱空深度和位置下的波谱特点, 研究了基于应力波与电磁波的道面脱空测试方法的有效性与优越性, 并对测试精度进行现场钻芯验证。验证结果表明: 传统重锤式弯沉仪测试数据为道面表层荷载位移, 无法反映跑道道面板底部土基沉陷变形与脱空缺陷; 面波测试深度较大, 采样数据可反映道面板下部地基变形与脱空状态; 映像方法测试道面板底部反射波性状, 可实现对道面板结构层底部脱空的判定; 以上3种测试方法均为间隔采样, 受采样点数目限制, 对跑道整体状态代表性不足, 无法克服由采样点间距导致的评价误差; 探地雷达测试方法可实现连续状态测试, 测试范围覆盖率为100%, 且雷达测试数据与传统测试数据符合率为95%, 并经8样本点钻芯试验验证孔底脱空测试精度为87.5%, 但雷达测试结果对脱空的量化分析不足, 需依托面波测试与映像测试结果对脱空测试结果进行有效验证。
更多>
2016, 16(6): 1-11.
摘要
(
4258
)
HTML
(
408
)
PDF (5894KB)
(
3024
)
引用
(
)
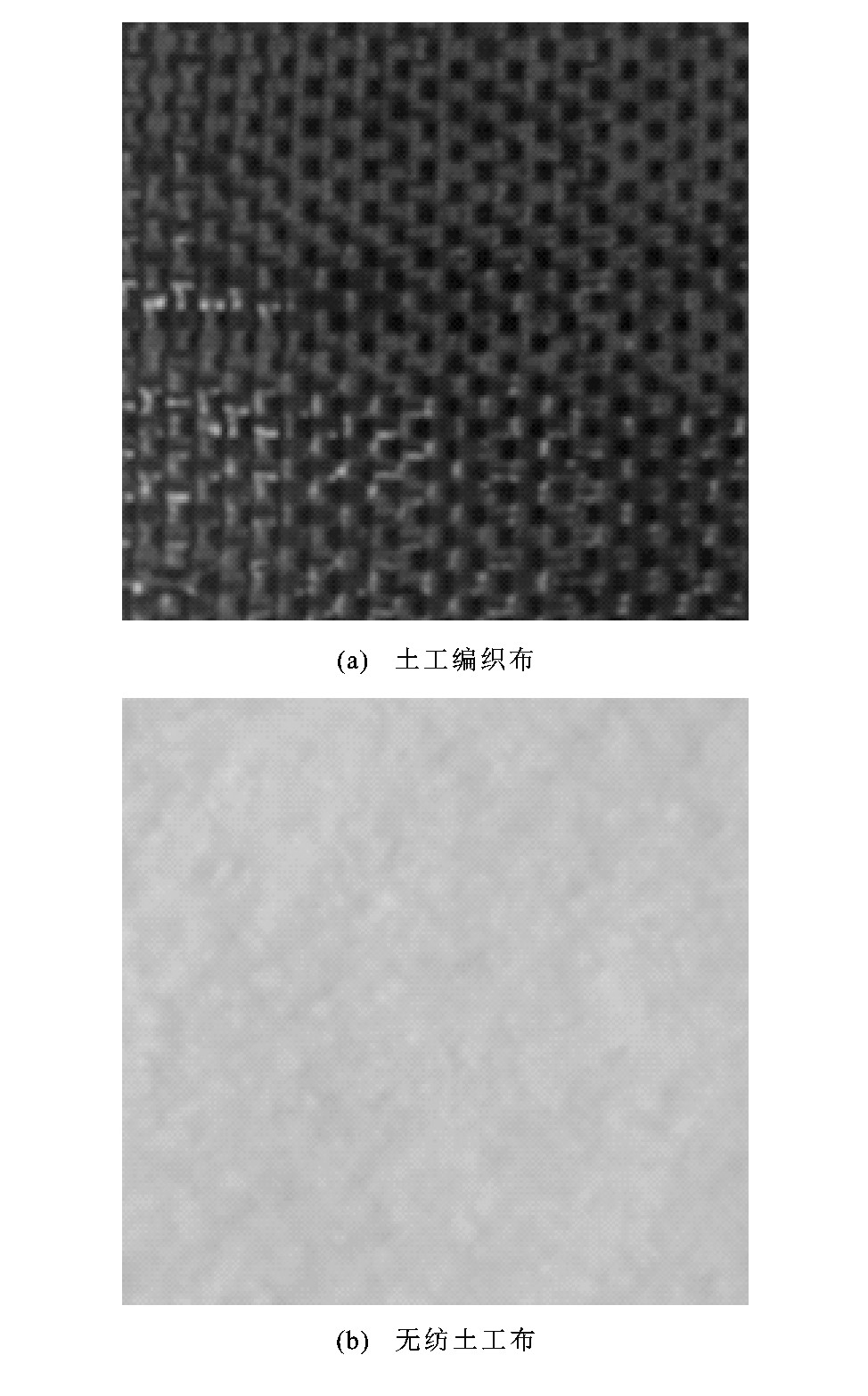
土工布与砂土界面循环剪切动力特性
王军
,
刘飞禹
,
王攀
,
耿雪玉
摘要:
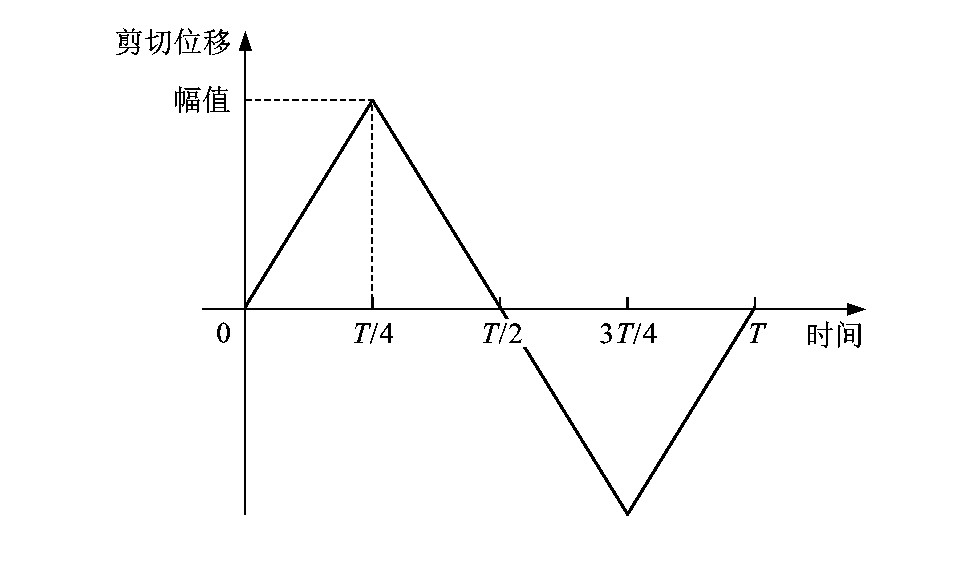
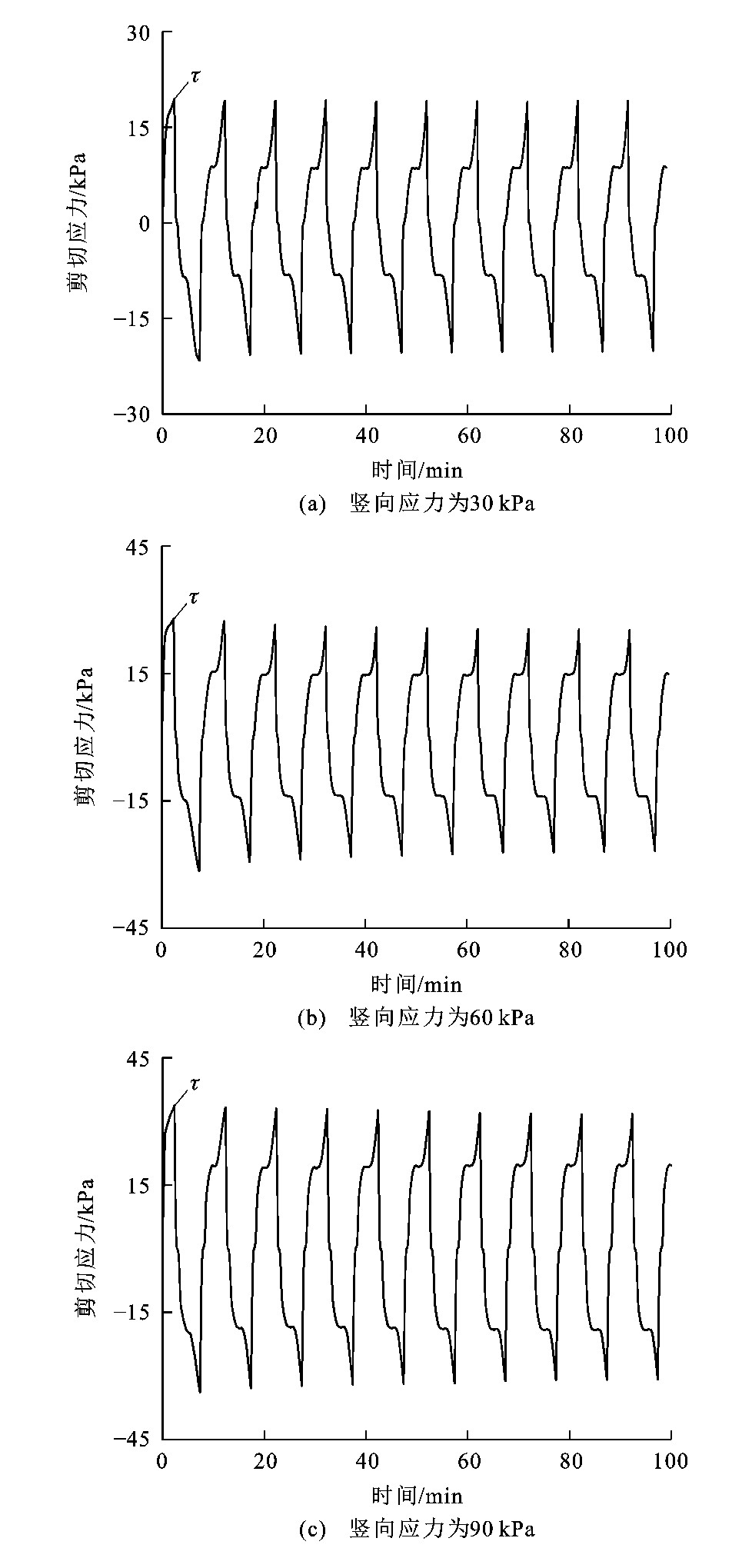
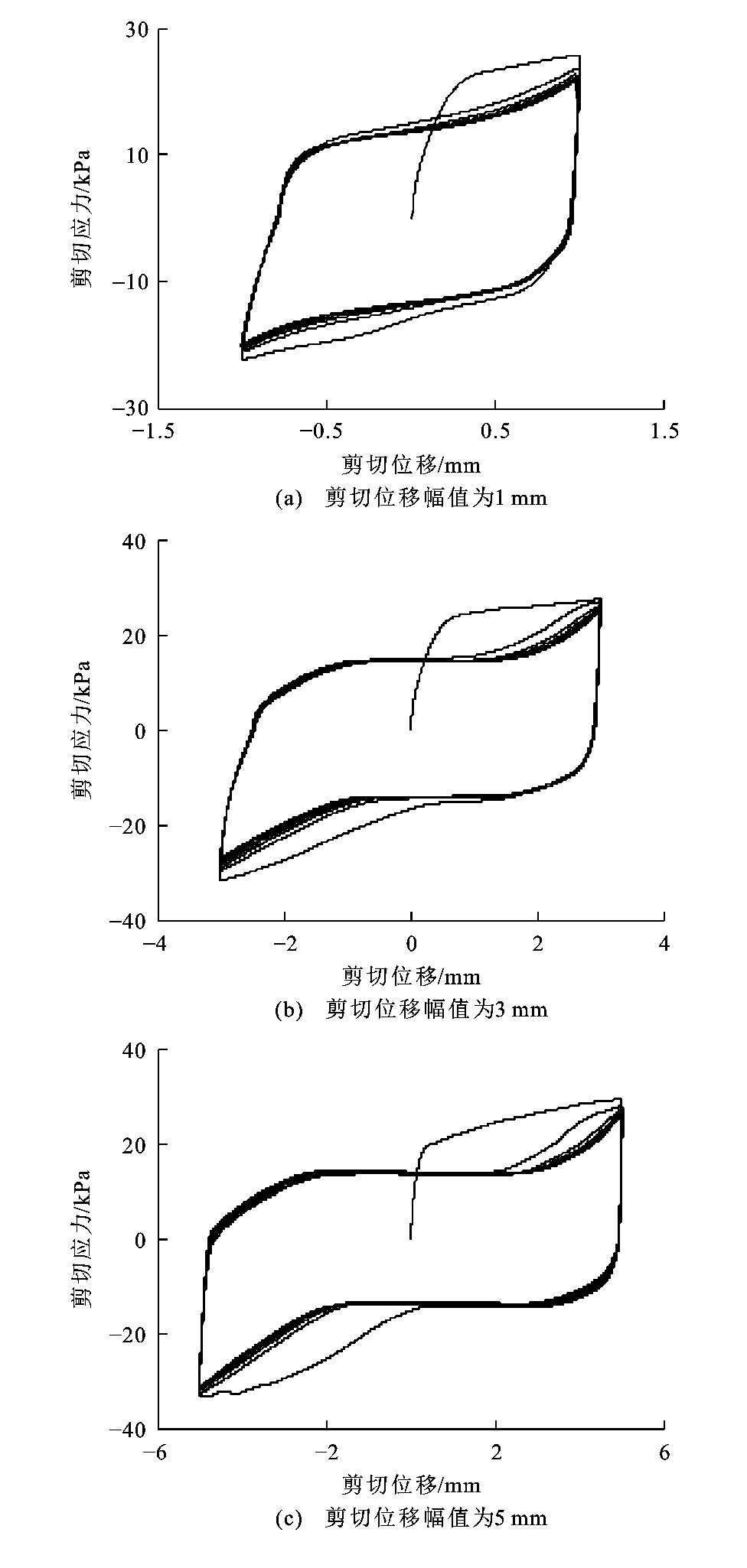
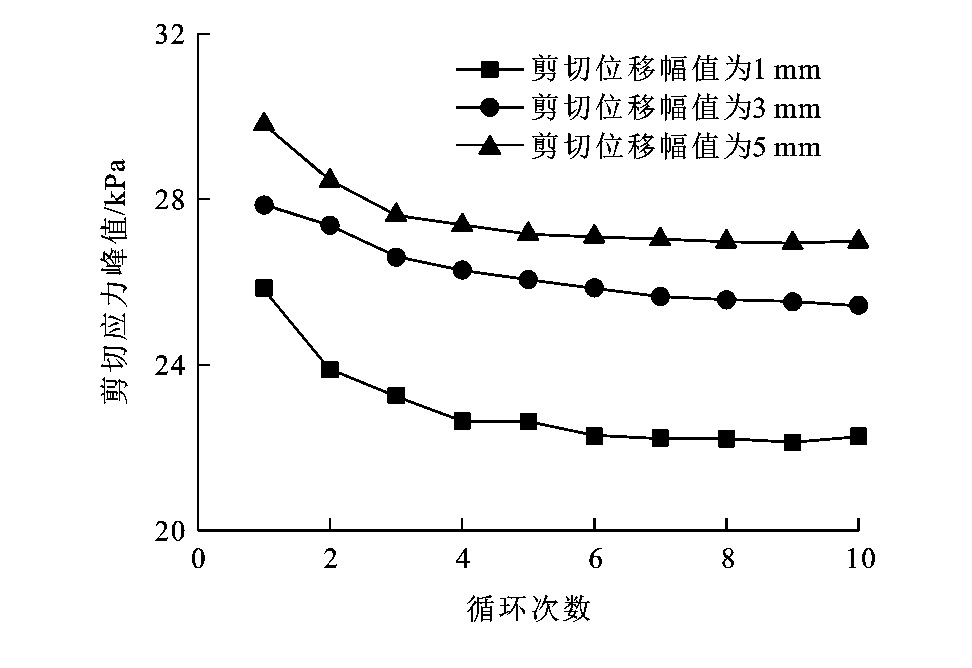
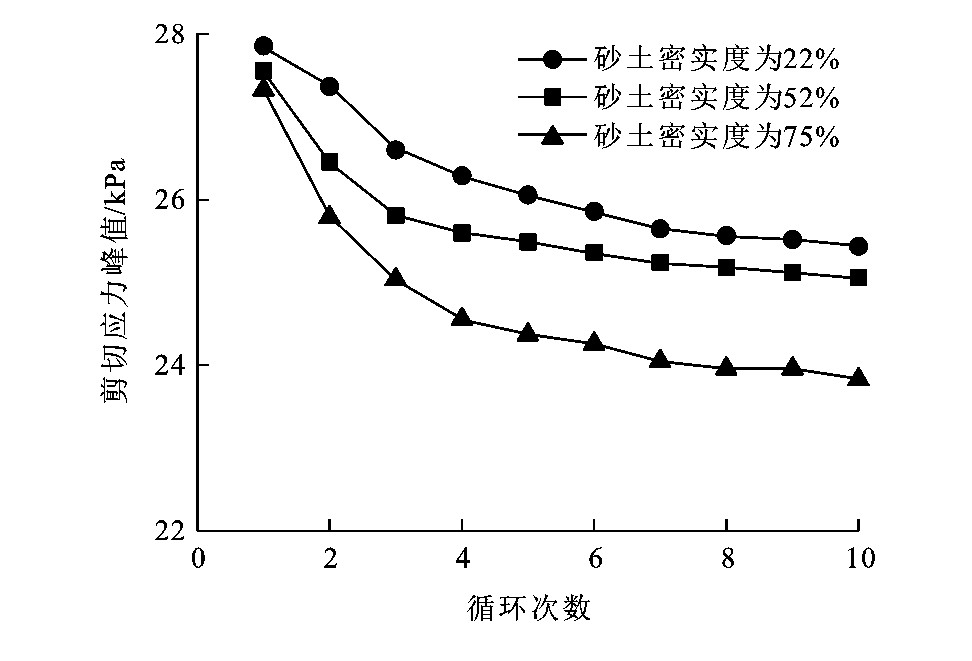
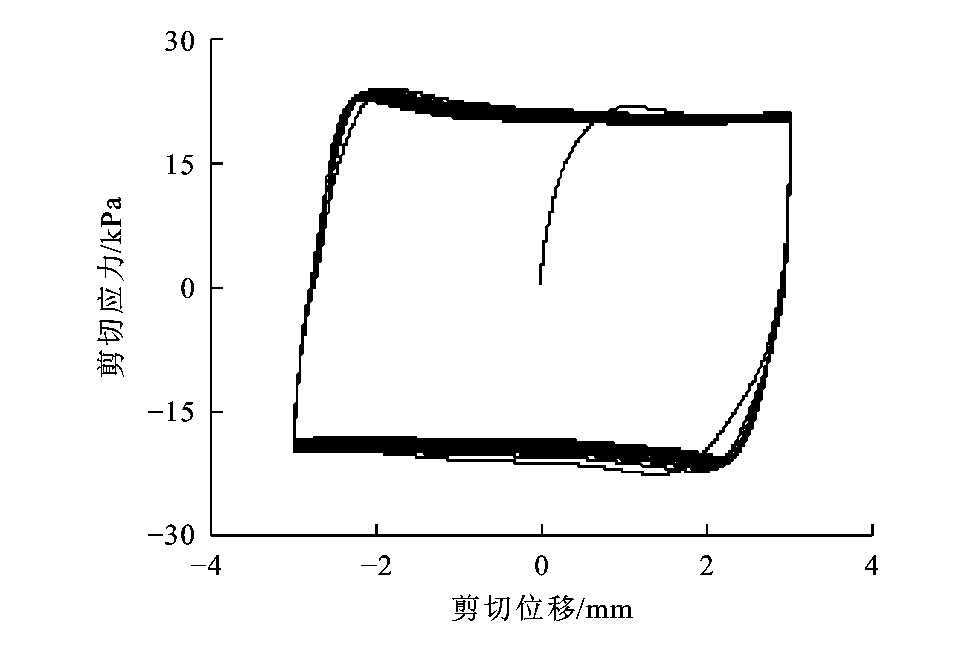
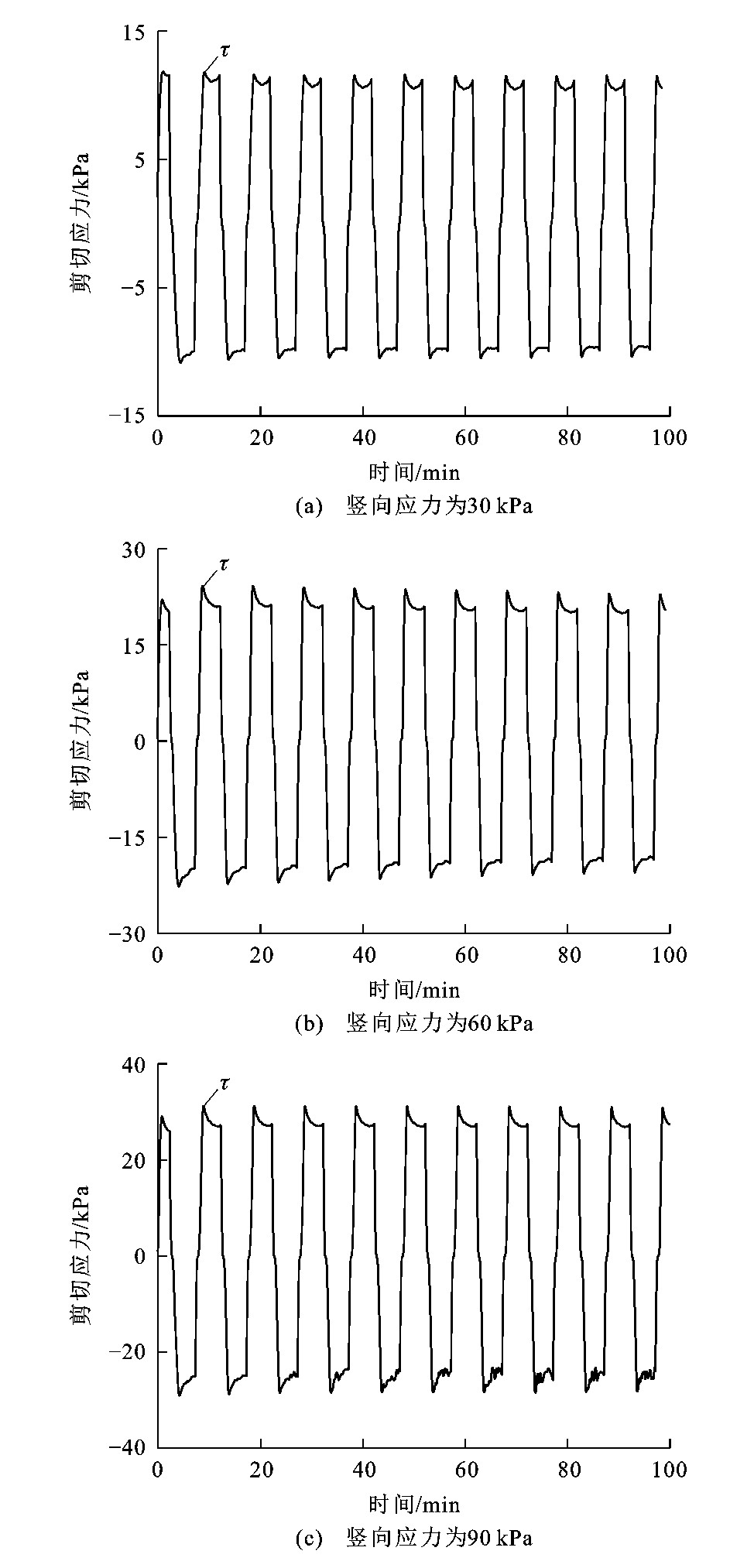
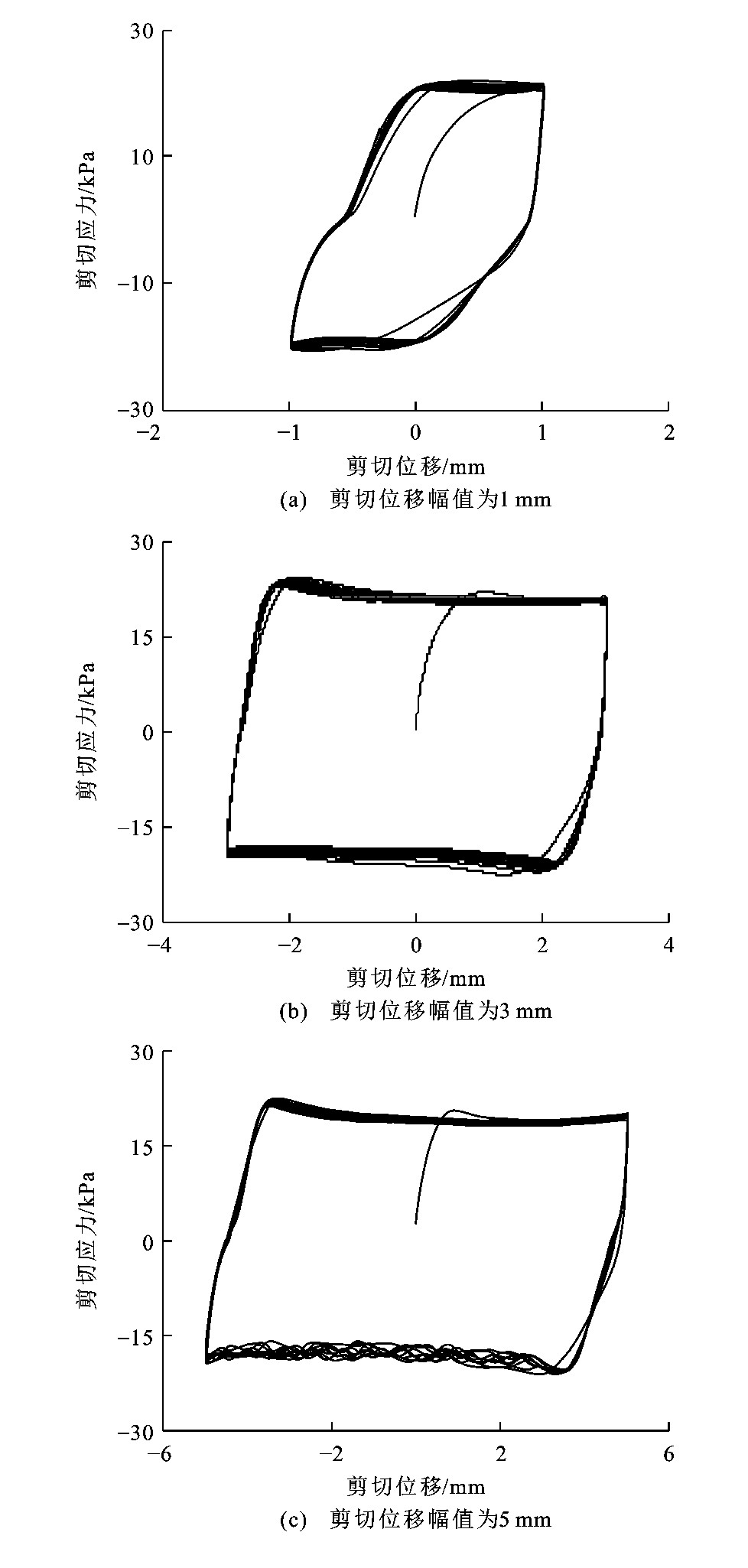
利用室内大型循环直剪仪进行了一系列筋土界面循环剪切试验, 筋材采用土工编织布和无纺土工布, 土体采用中国ISO标准砂, 在竖向应力分别为30、60、90 kPa, 剪切位移幅值分别为1、3、5 mm, 砂土密实度分别为22%、52%、75%时, 研究了竖向应力、剪切位移幅值、砂土密实度对筋土界面循环剪切特性的影响, 分析了循环剪切过程中2种土工布与砂土界面的剪切应力峰值和剪切应力-剪切位移的变化规律。研究结果表明: 2种土工布与砂土界面均会发生循环剪切软化现象, 但软化规律不同; 竖向应力从30 kPa增大到90 kPa时, 土工编织布与砂土界面循环剪切应力峰值增大了72.9%, 无纺土工布与砂土界面循环剪切应力峰值增加了167.5%, 表明竖向应力对土工编织布与砂土界面的循环剪切特性影响明显; 剪切位移幅值分别为1、3、5 mm时, 土工编织布与砂土界面剪切应力峰值分别为25.9、27.9、29.8 kPa, 无纺土工布与砂土界面剪切应力峰值分别为21.8、23.8、22.6 kPa, 表明随着剪切位移幅值增大, 土工编织布与砂土界面剪切应力峰值随之增大, 而无纺土工布与砂土界面剪切应力峰值先增大后减小; 在3种砂土密实度下, 土工编织布与砂土界面剪切应力峰值之间的最大差值不超过2 kPa, 无纺土工布与砂土界面剪切应力峰值之间的最大差值不超过3 kPa, 表明砂土密实度对2种土工布与砂土界面的循环剪切特性影响不明显。
更多>
2016, 16(6): 12-20.
摘要
(
4079
)
HTML
(
421
)
PDF (1264KB)
(
2842
)
引用
(
)
砂夹层黄土路基水分迁移规律
晏长根
,
邹群
,
许昱
,
万琪
,
石玉玲
,
马刚峰
摘要:
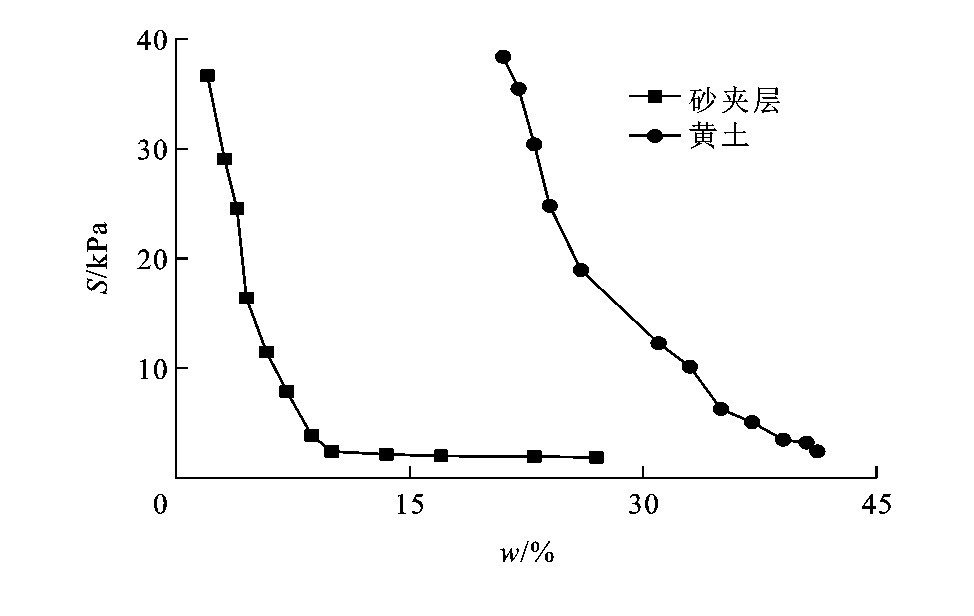
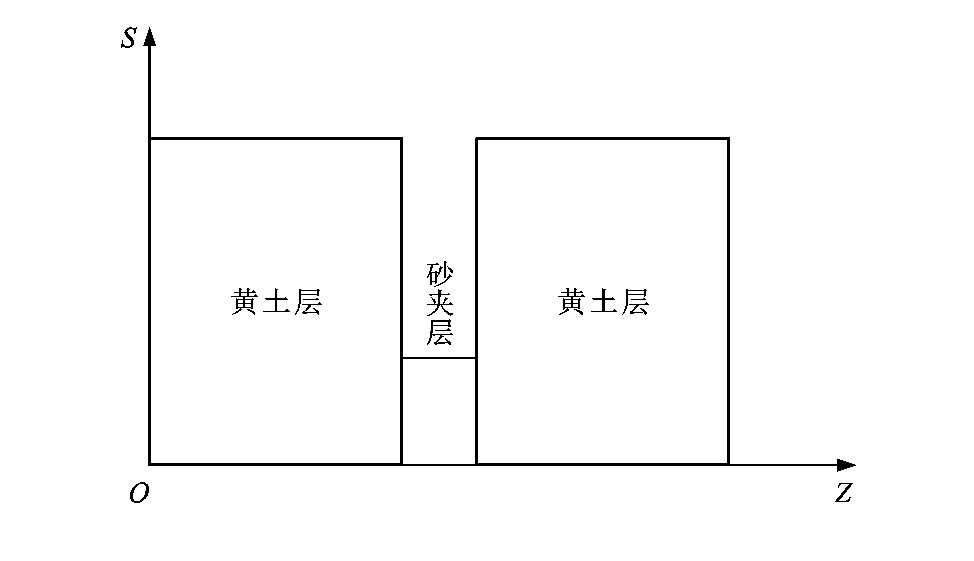
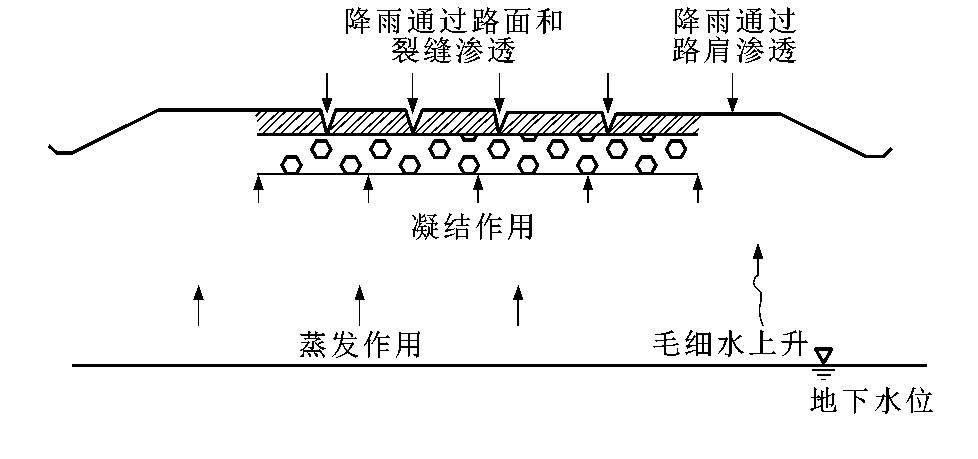
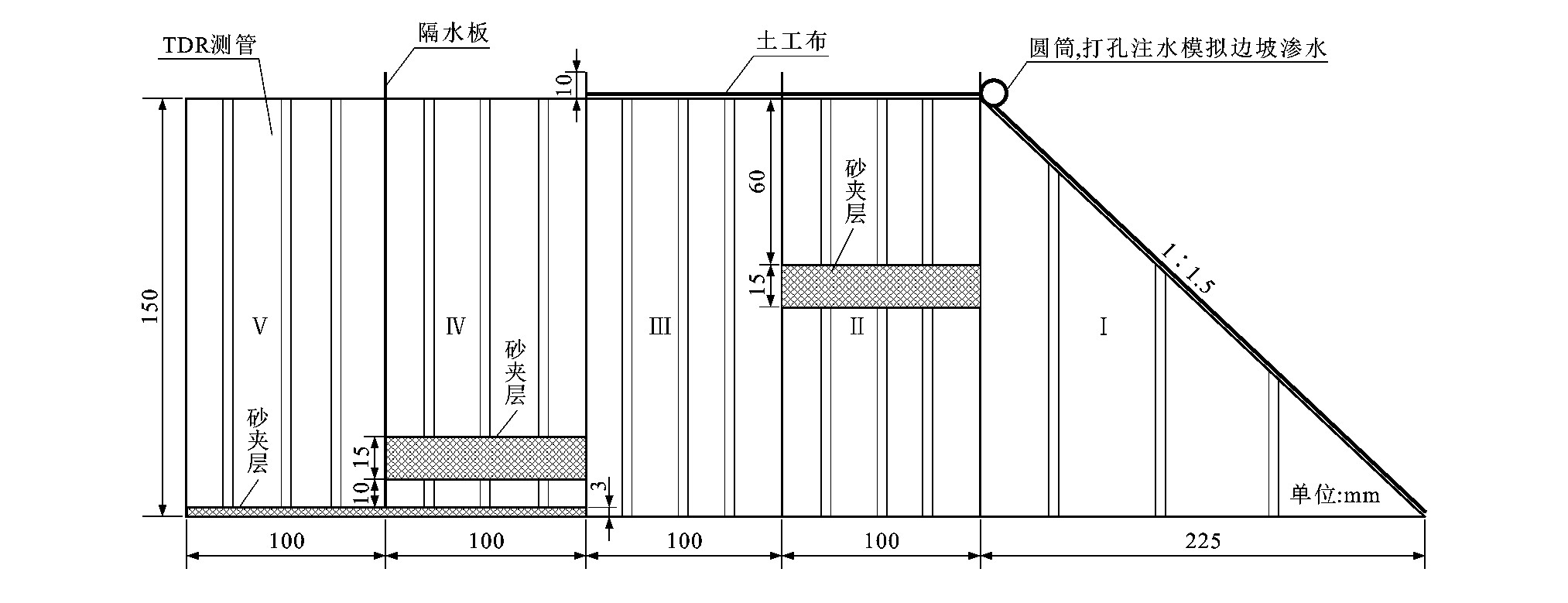
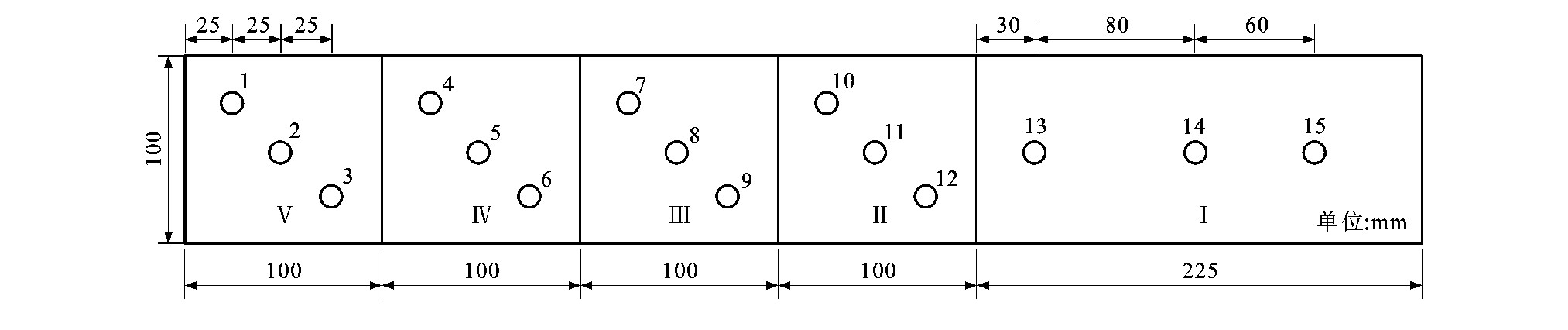
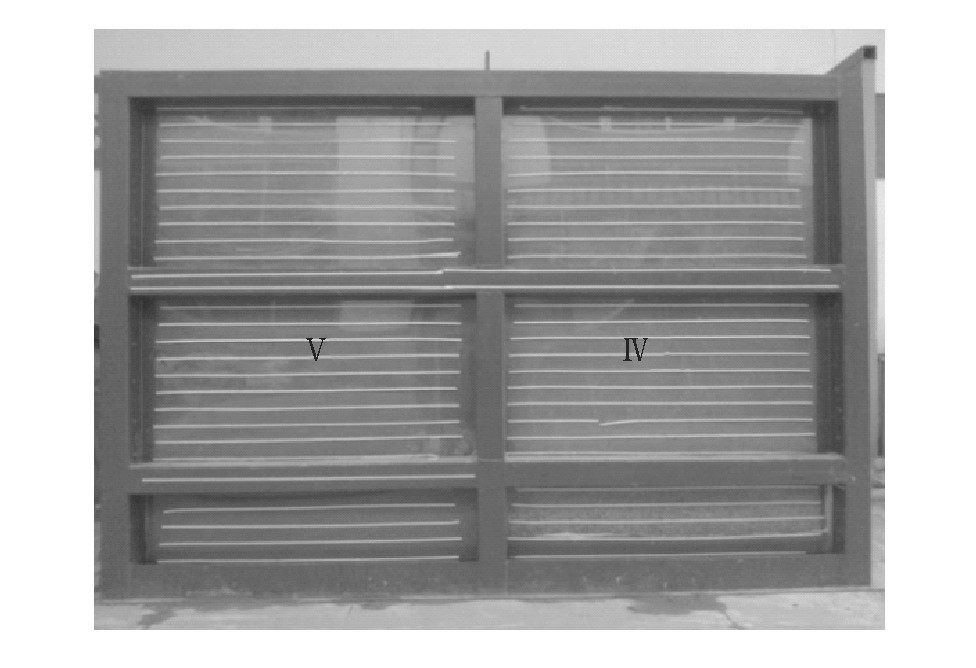
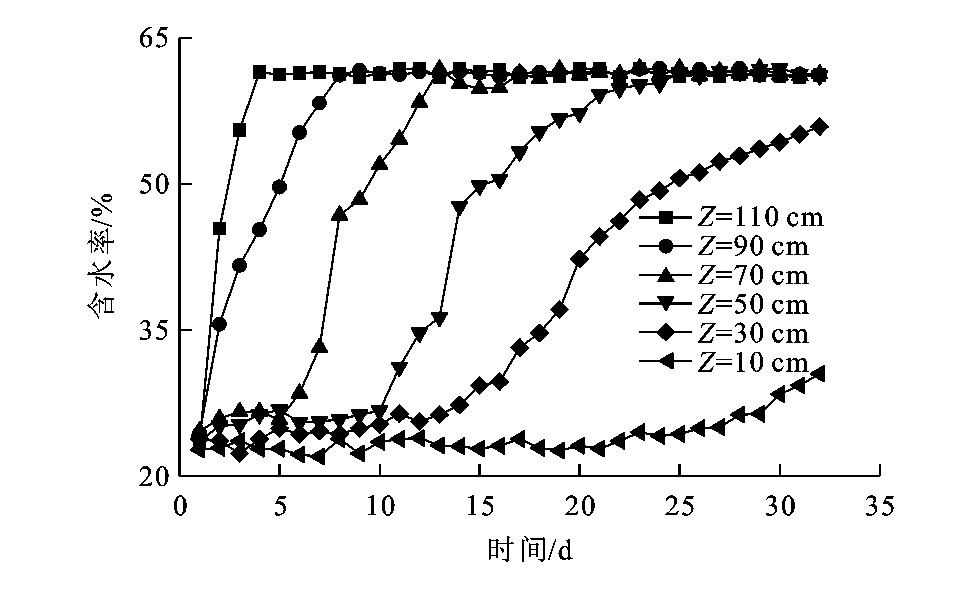
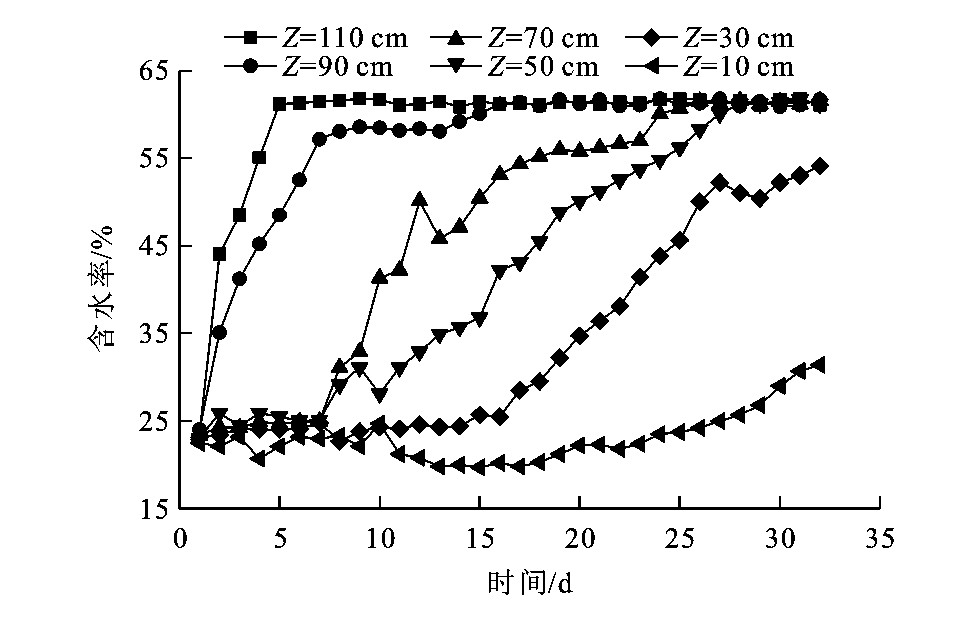
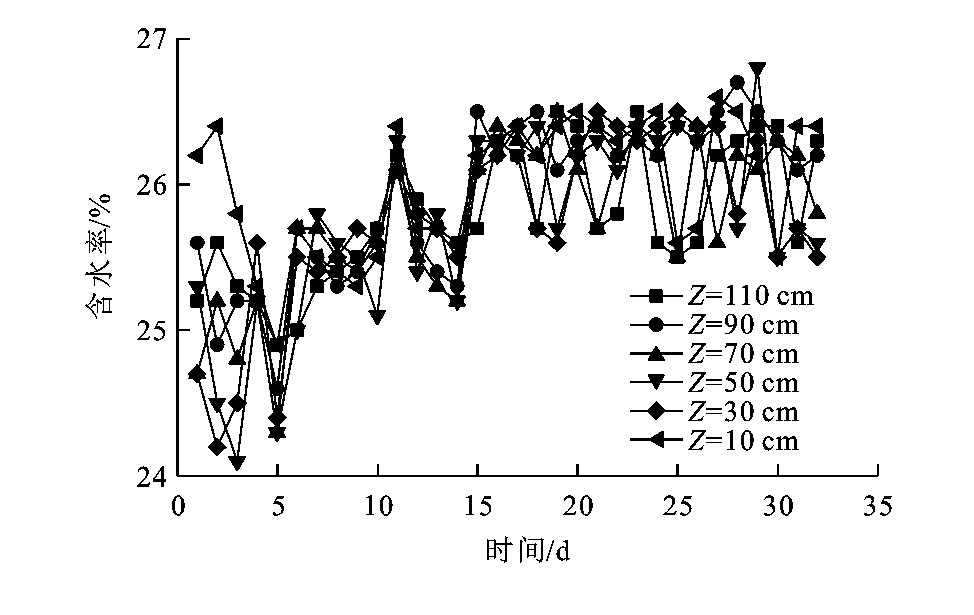
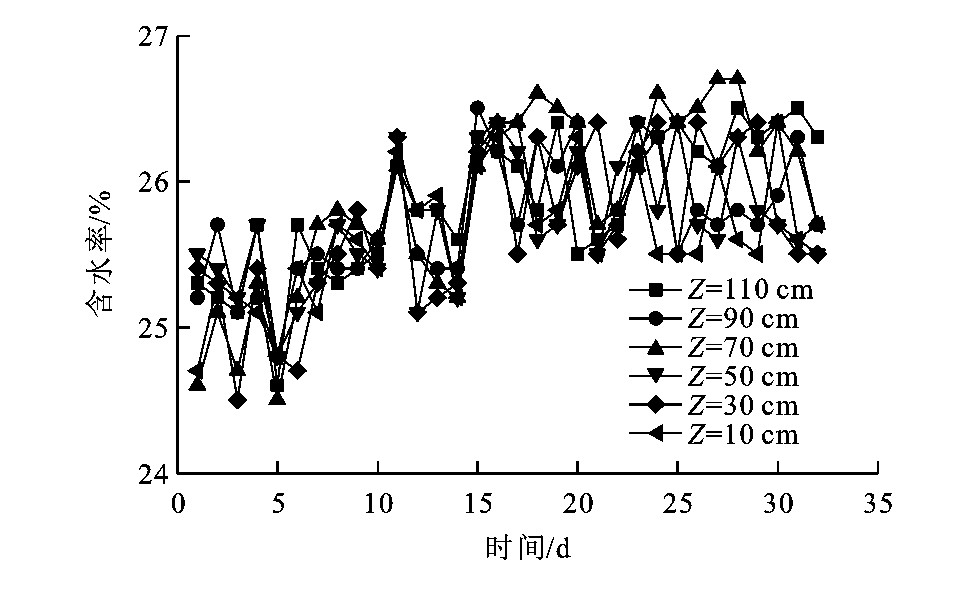
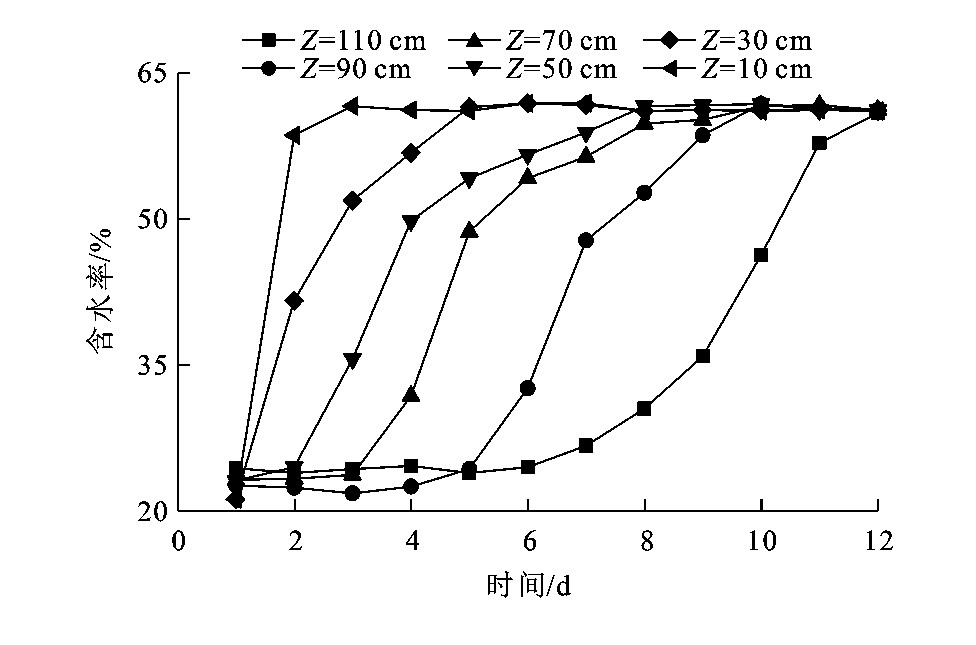
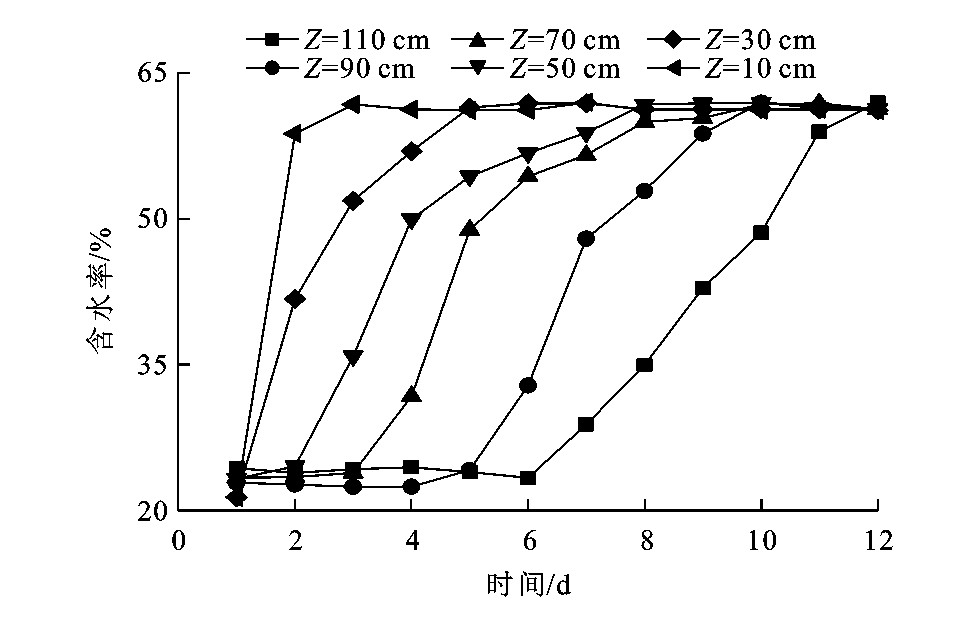
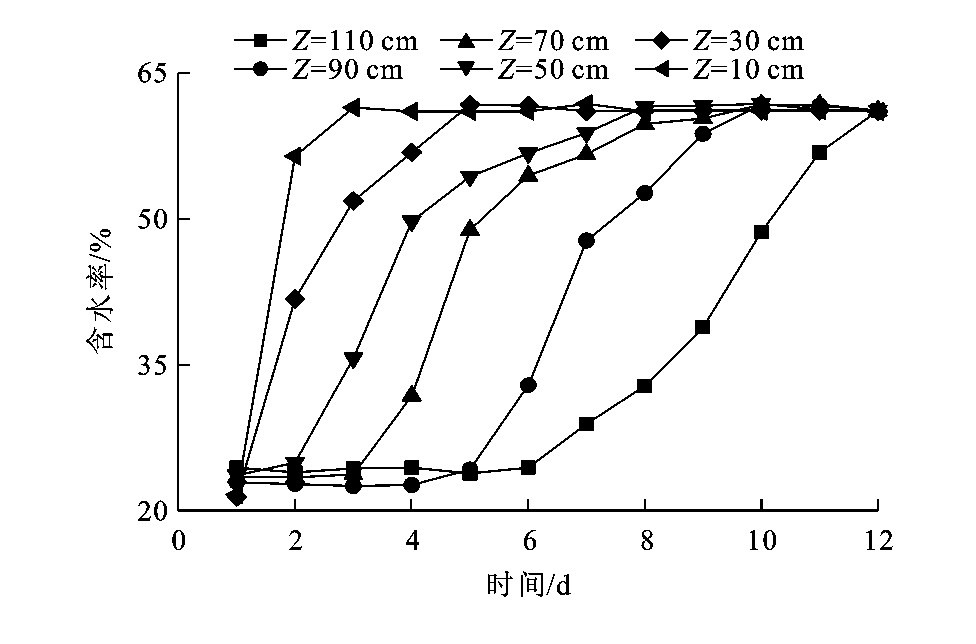
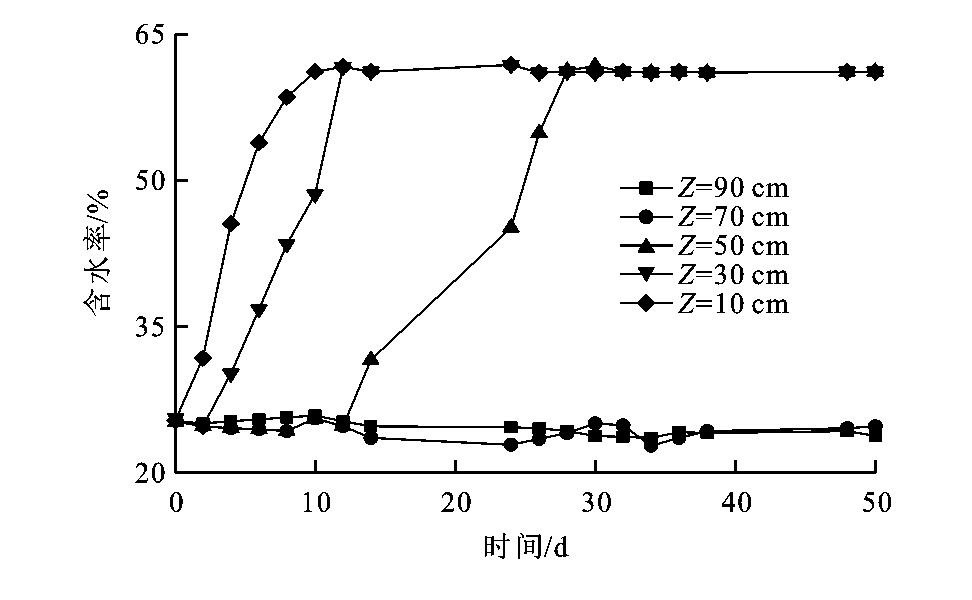
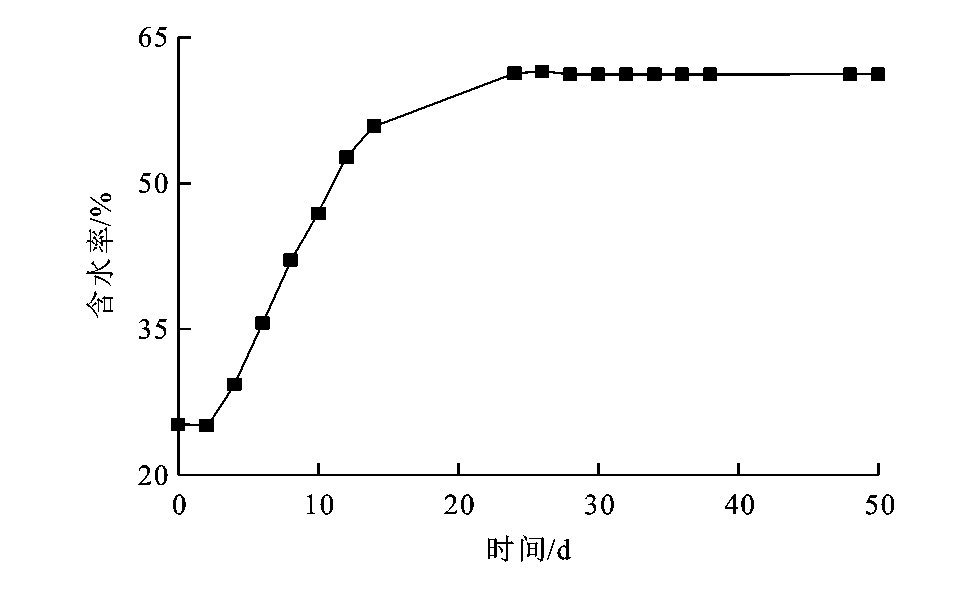
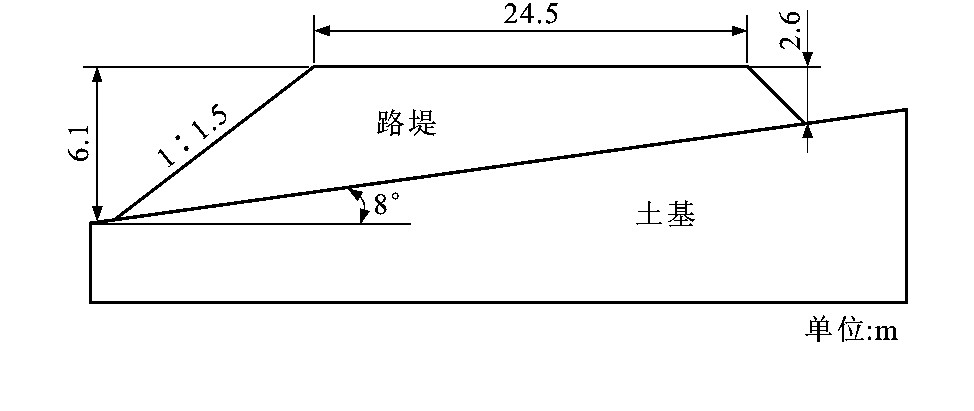
以十天高速公路黄土路基为依托, 基于土水势原理提出了在路基土层放置砂夹层来减小黄土层浸水沉陷的发展, 采用室内模型试验, 在黄土路基中部与底部设置砂夹层, 模拟了路基毛细水上升、顶面渗水与边坡渗水的情况, 分析了路基含水率变化规律及其对路基整体强度和稳定性的影响, 并证实了砂夹层的减水阻渗效应。研究结果表明: 黄土路基模型初期水分迁移很快, 中、后期迁移越来越慢; 底部设置砂夹层的路基模块在地下水位上升32d内的体积含水率为24%~27%, 纯黄土路基模块的中、下部(路基顶面0.5m以下)的体积含水率约为60%, 水分最终的影响深度达到了1.2m;在纯黄土路基模块顶面渗水12d后, 体积含水率均超过了60%, 而在中部设置了砂夹层的路基模块在夹层下15cm处(路基顶面0.8m以下)的体积含水率小于40%, 在25cm处体积含水率小于30%。可见, 在压实黄土路基底部与中部设置砂夹层能够阻隔毛细水的上升和减缓水分下渗, 减小了路基内部含水率, 提高了路基的整体稳定性和强度。
更多>
2016, 16(6): 21-29.
摘要
(
4506
)
HTML
(
571
)
PDF (1051KB)
(
2586
)
引用
(
)
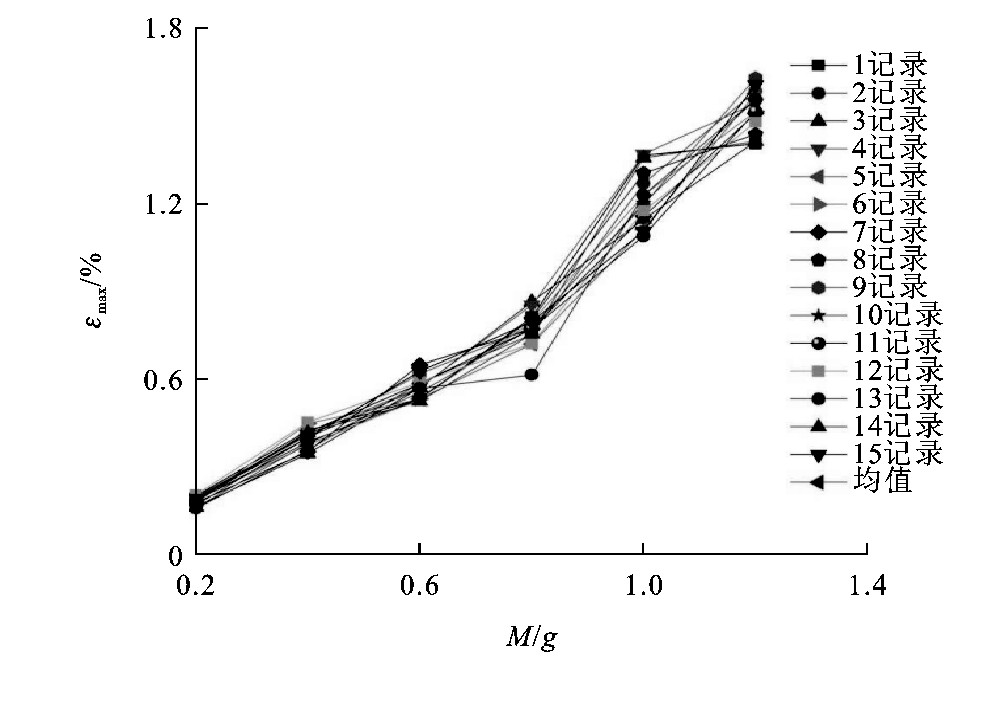
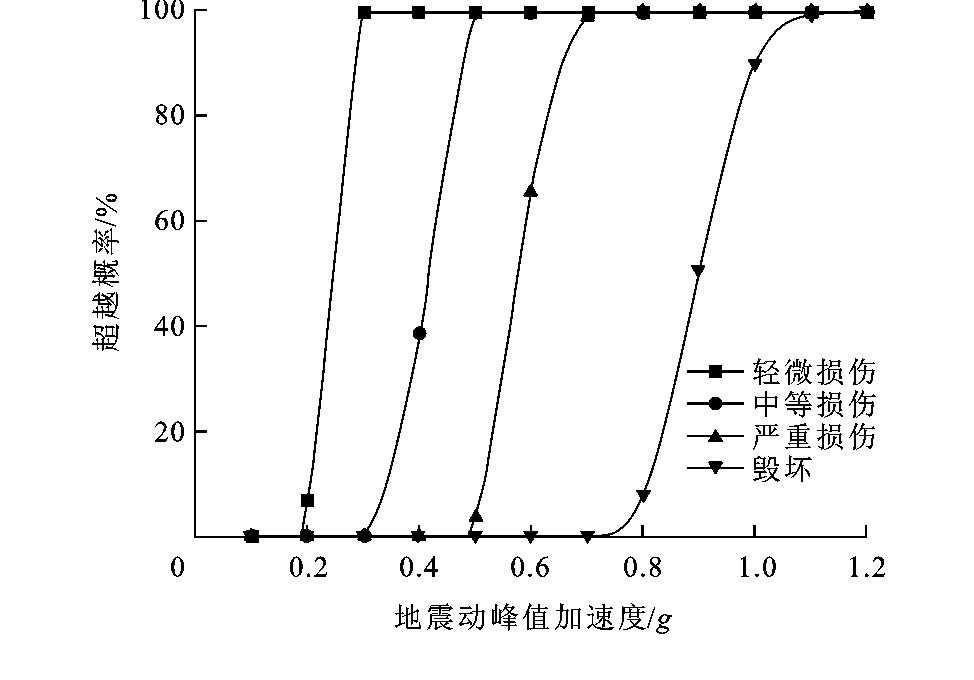
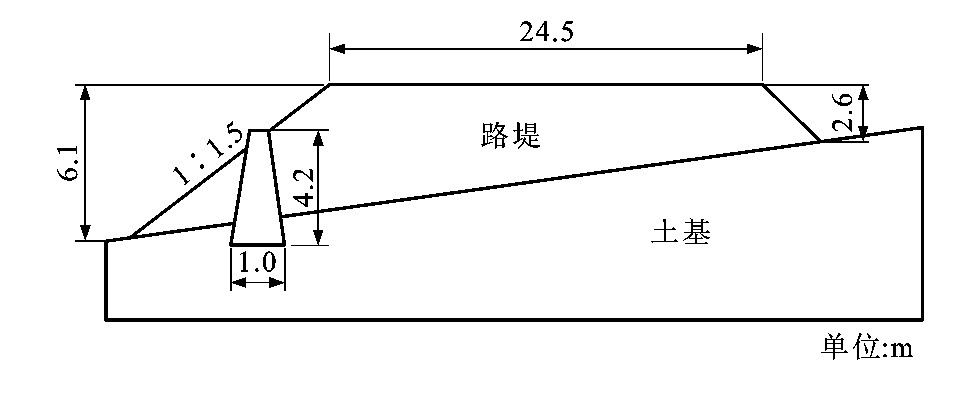
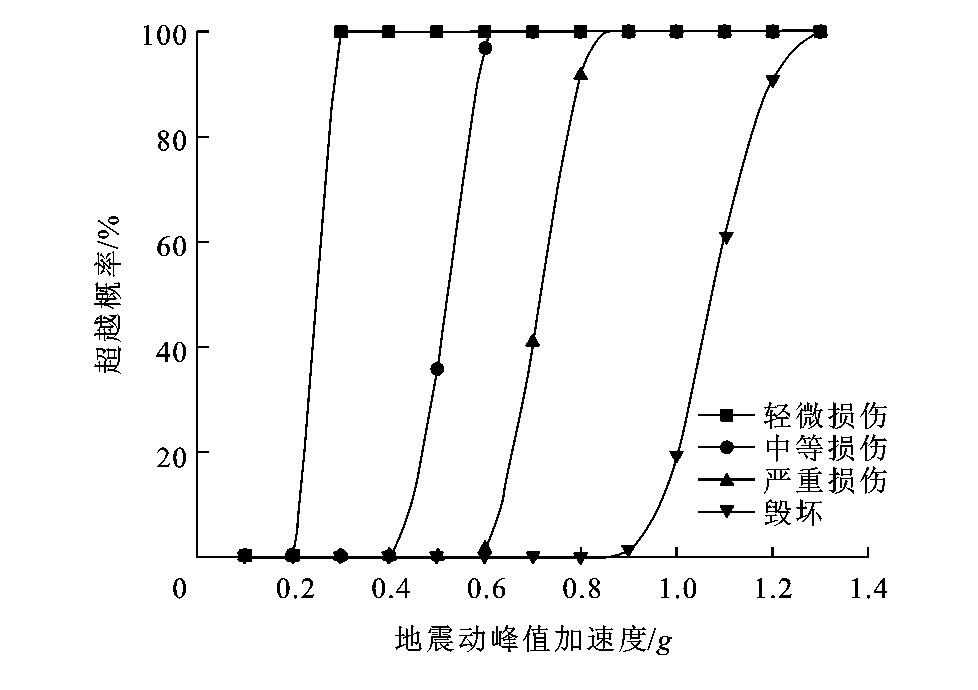
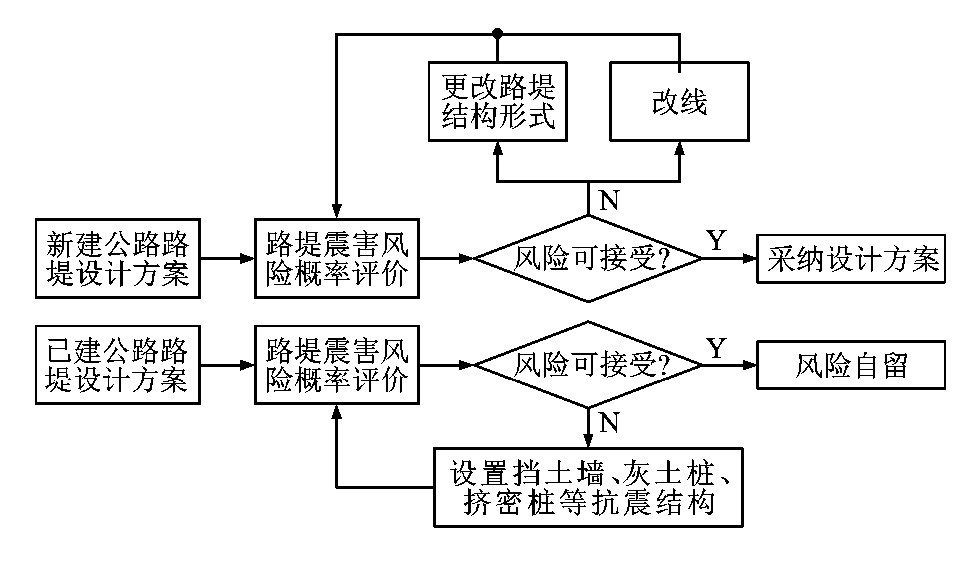
基于Monte Carlo方法的路堤震害风险概率评价
尹超
,
王晓原
,
刘菲菲
,
田伟
,
AMELANI
摘要:
以连云港-霍尔果斯高速公路K1125+470处路堤为研究对象, 在路堤震害损伤判别、路堤结构形式和地震动输入确定的基础上, 采用增量动力分析和概率性地震需求分析相结合的方法绘制了路堤震害易损性曲线, 评价了路堤震害易损性; 将路堤震害风险概率定义为场地地震危险性与路堤震害易损性的卷积, 并提出相关计算方法; 研究了场地地震烈度概率分布模型和地震烈度与地震动峰值加速度转换关系, 提出了未来50年内地震动峰值加速度的概率分布函数; 基于Monte Carlo方法进行了无挡土墙和有挡土墙路堤的震害风险概率评价, 验证了挡土墙对提高路堤抗震性能的积极作用。研究结果表明: 当地震动峰值加速度达到0.6g时, 无挡土墙路堤超越严重损伤的概率为65.910%, 达到0.8g时, 超越严重损伤的概率为99.995%, 说明无挡土墙路堤的震害易损性较高; 未来50年内无挡土墙路堤发生严重损伤和毁坏的风险概率为29.07%, 发生基本完好和轻微损伤的风险概率为31.97%;未来50年内有挡土墙路堤超越严重损伤的风险概率比无挡土墙路堤低7.9%, 发生基本完好和轻微损伤的风险概率比无挡土墙路堤高12.14%, 说明挡土墙可以显著降低路堤震害风险; 以路堤未来50年发生毁坏的风险概率40%为风险可接受度对路堤进行抗震设计和加固。
更多>
2016, 16(6): 30-38.
摘要
(
4181
)
HTML
(
515
)
PDF (669KB)
(
2547
)
引用
(
)
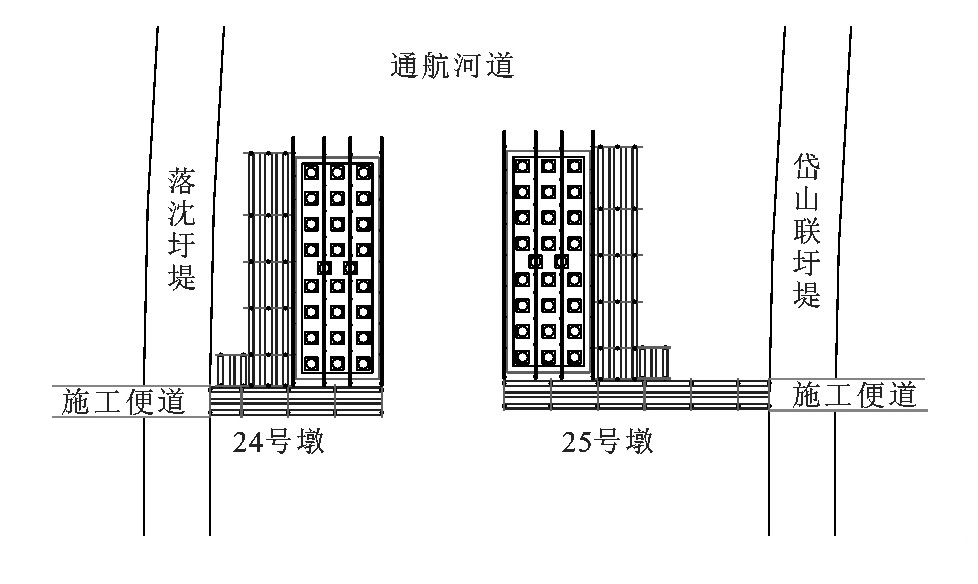
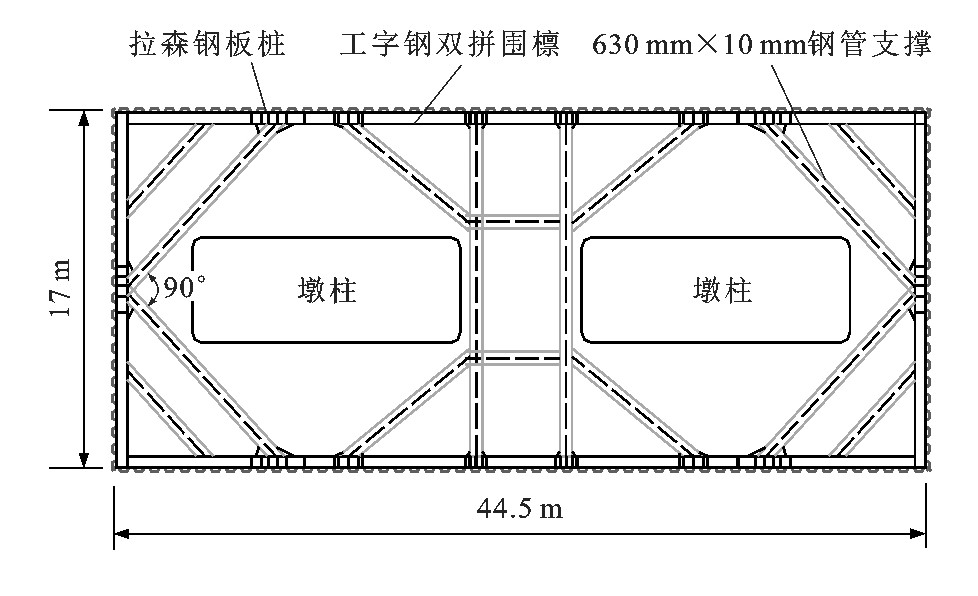
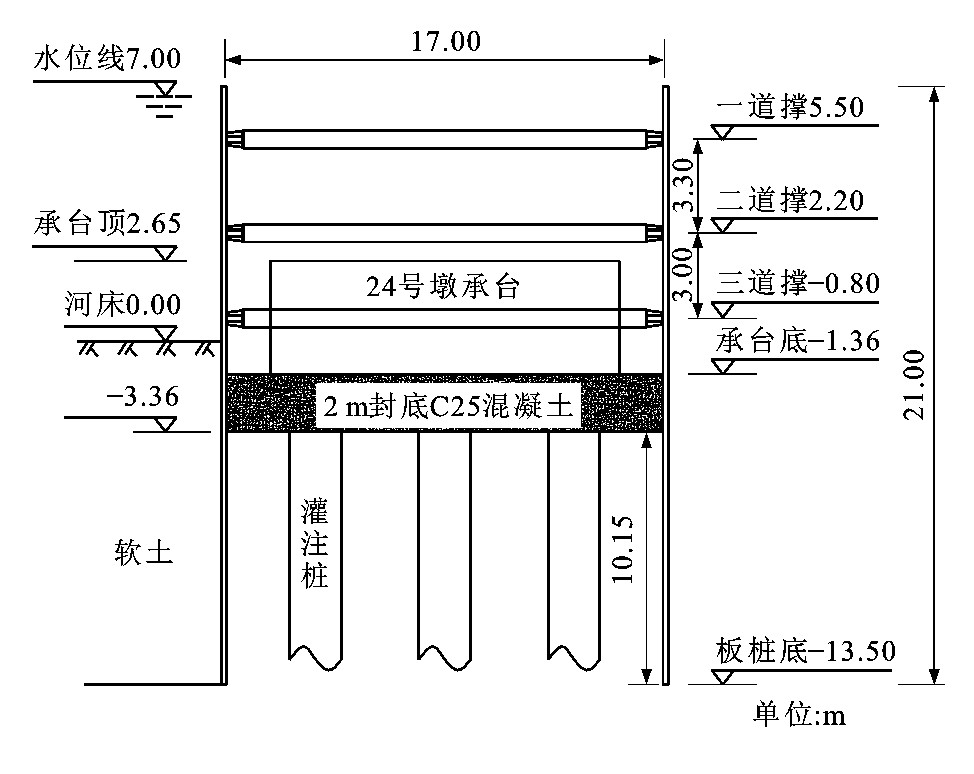
基于增量法钢板桩围堰的安全性计算方法
戴良军
,
朱大勇
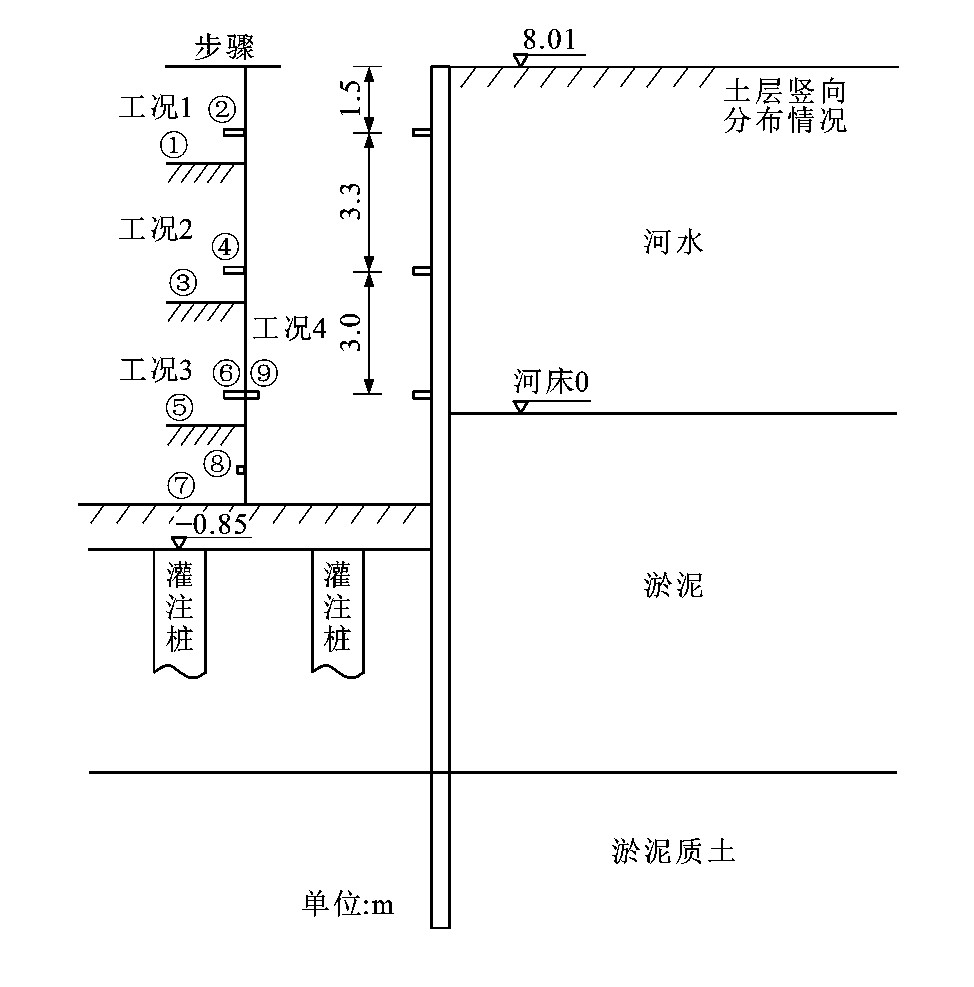
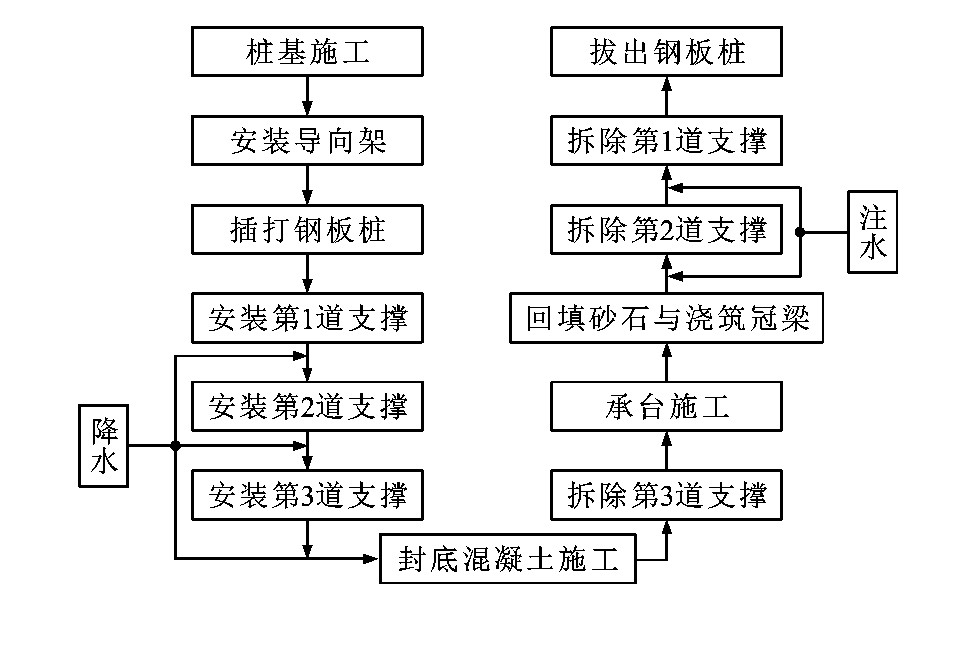
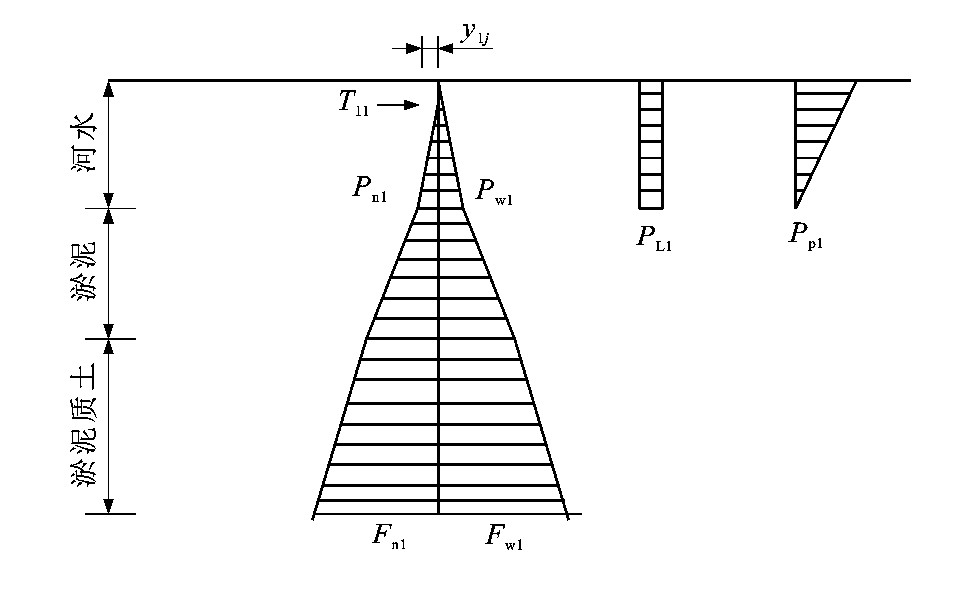
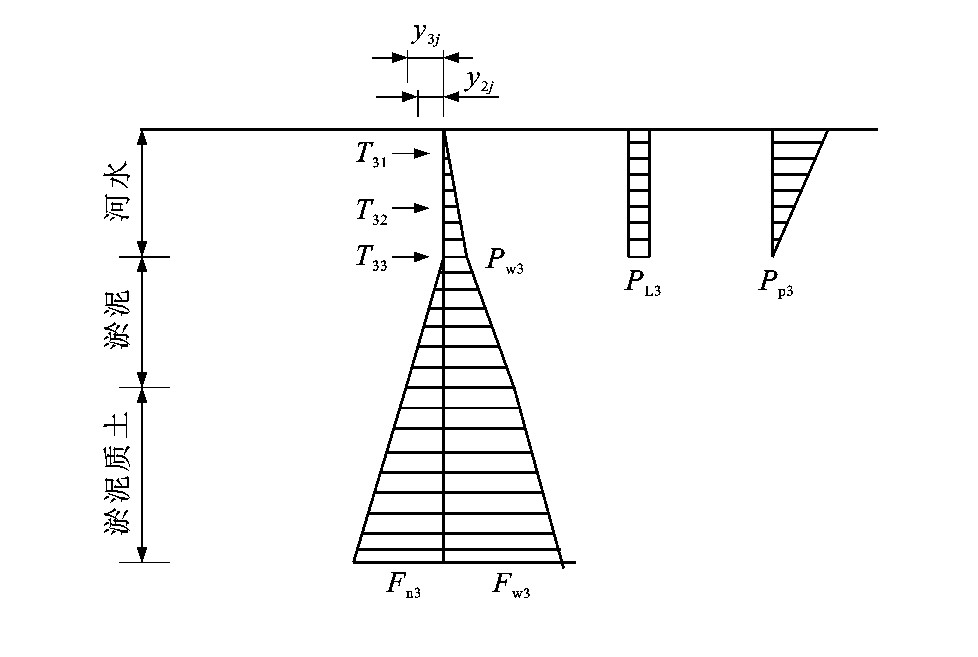
摘要:
分析了现有的钢板桩计算理论, 计算了钢板桩围堰的土压力、静水压力、流水压力、波浪力与支撑力; 分析了钢板桩围堰的施工工序, 将钢板桩视为非线性弹性地基梁, 建立了基于增量法的非线性弹性地基梁挠曲微分方程, 计算了地基土水平抗力系数、钢板桩弯曲变形系数与内外荷载增量, 研究了钢板桩围堰各工况下受力与变形; 基于裕溪河大桥桥墩基础的钢板桩围堰, 验算了钢板桩围堰的内力、变形、强度、整体稳定性、抗倾覆安全性与抗隆起安全性。计算结果表明: 钢板桩最大位移为38.12 mm, 小于规范值80 mm; 钢板桩最大许用应力为168.60 MPa, 小于规范值218.52 MPa; 管桩最大许用应力为112.29 MPa, 小于规范值174.07 MPa; 钢板桩围堰整体稳定安全系数为2.8, 大于规范值1.3;4种工况下抗倾覆安全系数分别为3.4、2.8、2.9、1.9, 大于规范值1.2;根据普朗德尔理论与太沙基理论计算的抗隆起安全系数分别为3.1和3.5, 大于规范值1.6。可见, 基于增量法钢板桩围堰的安全性计算结果满足相关规范要求, 计算方法合理、可靠。
更多>
2016, 16(6): 39-47.
摘要
(
4591
)
HTML
(
748
)
PDF (834KB)
(
3741
)
引用
(
)
载运工具运用工程
机车与车辆间车钩连挂稳定性
邹瑞明
,
马卫华
,
罗世辉
摘要:
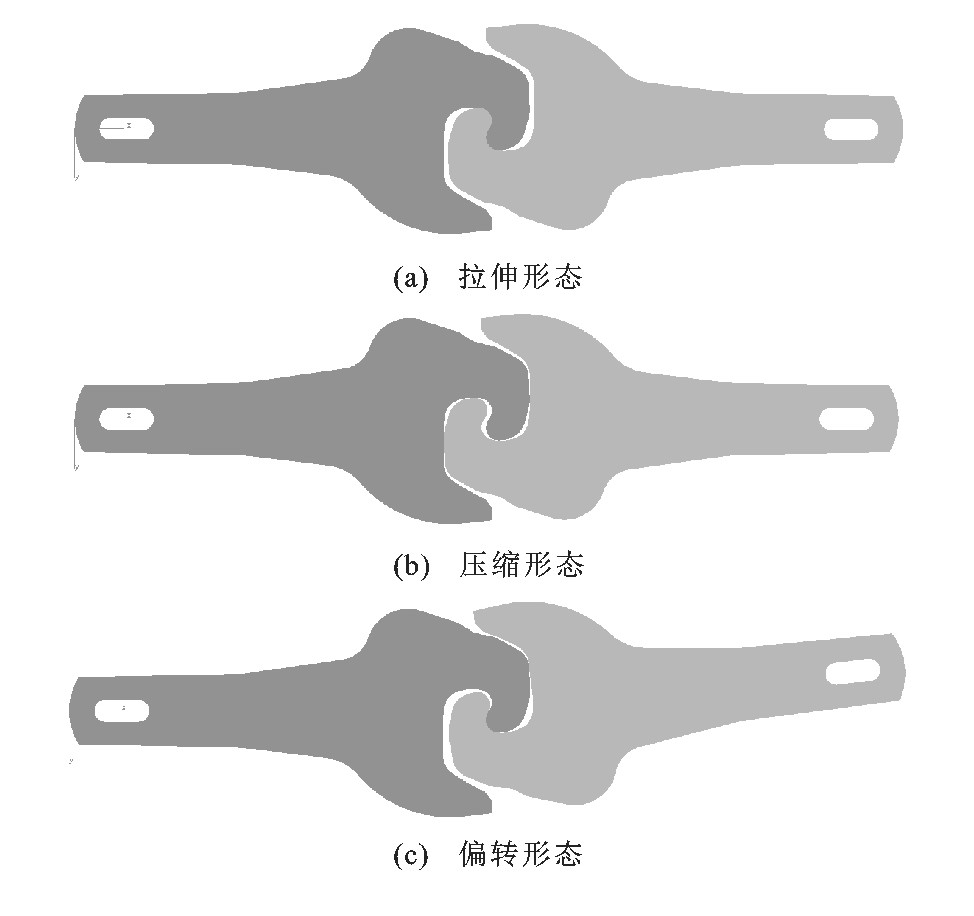
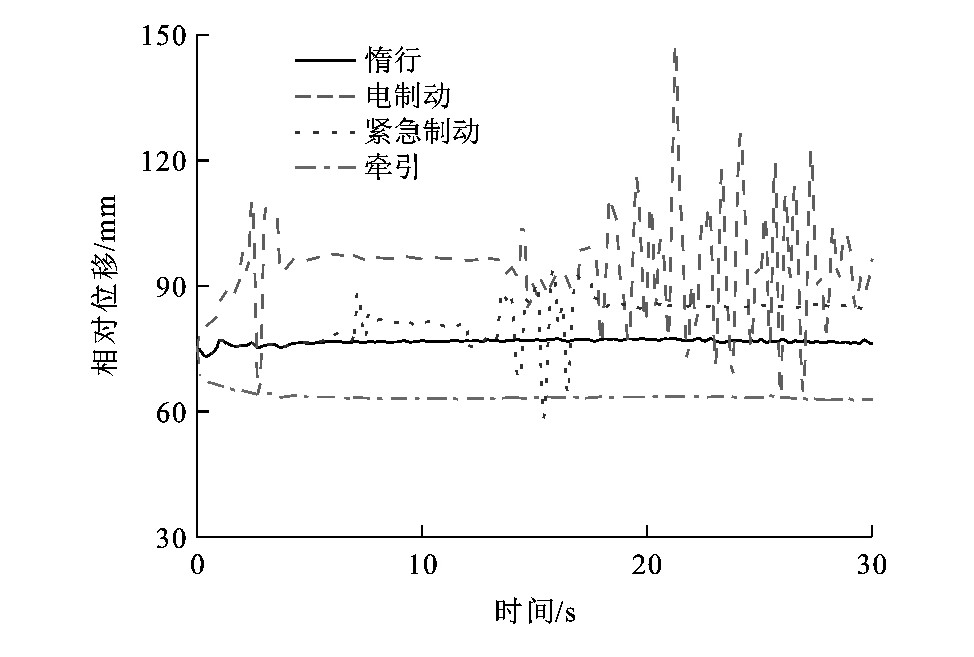
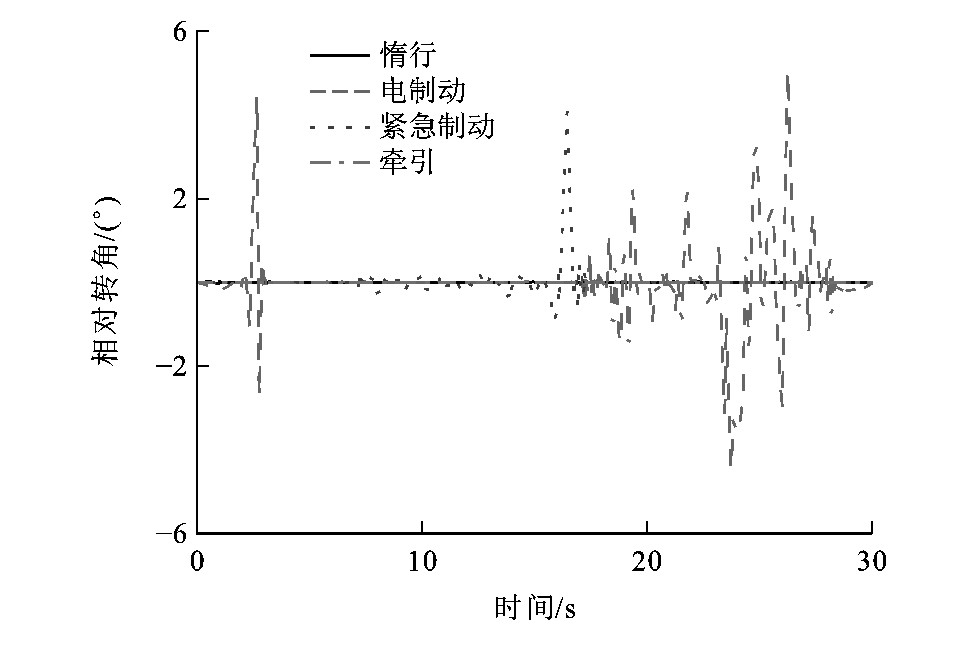
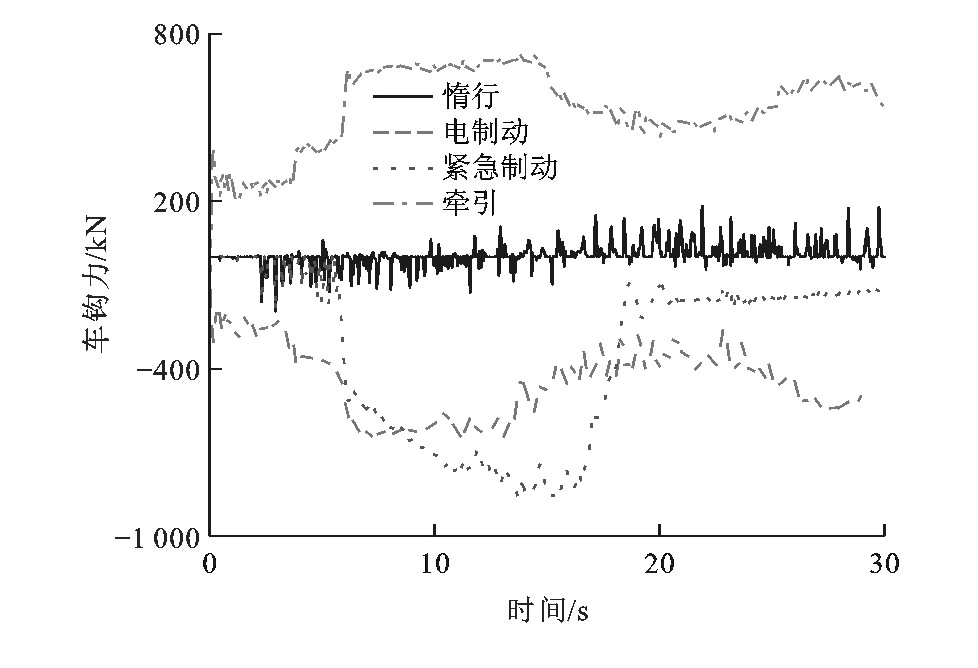
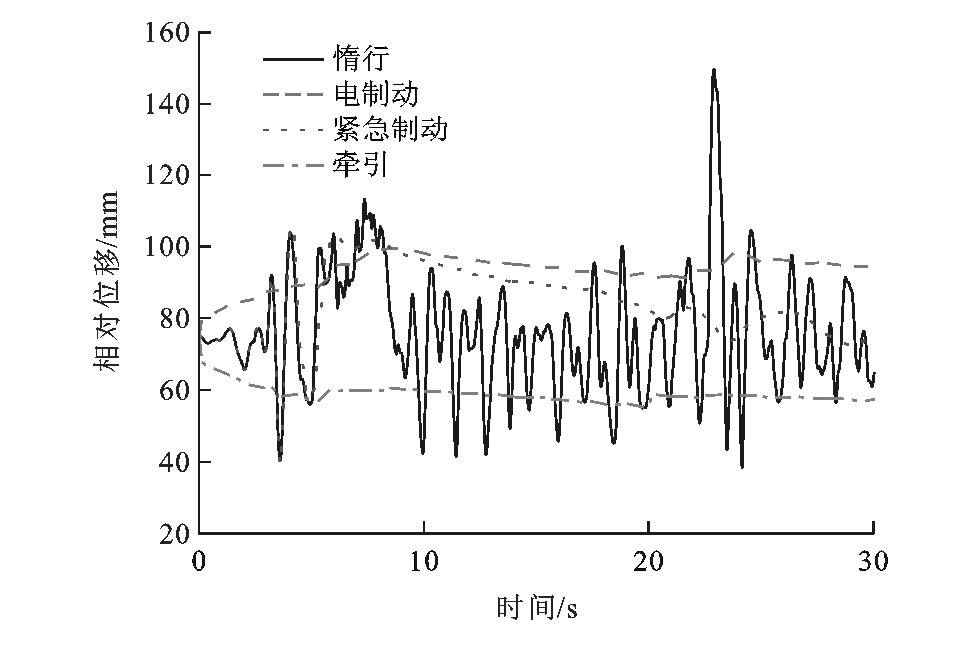
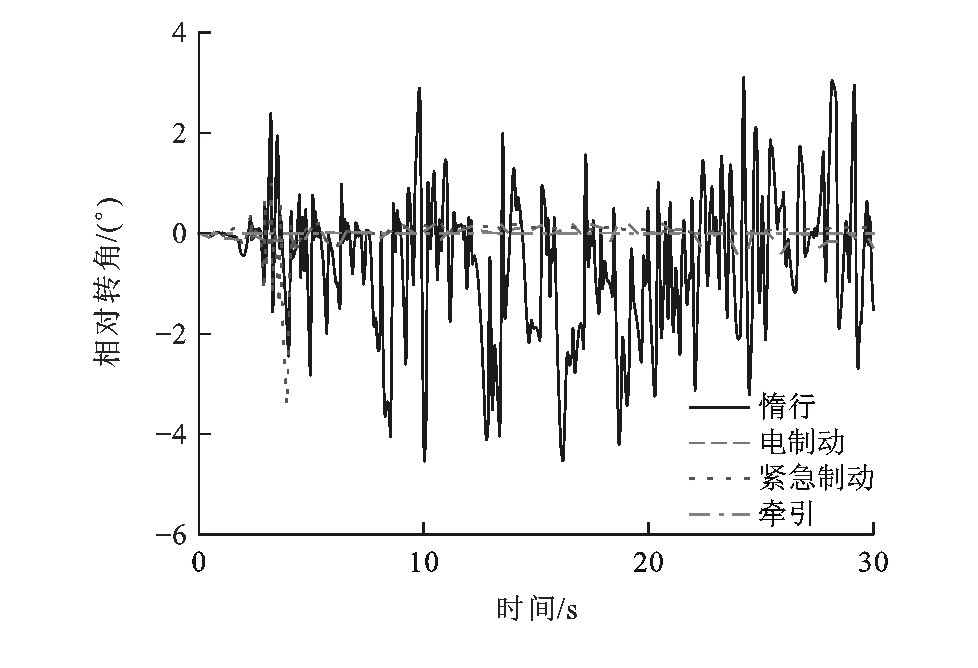
为了明确机车车辆间车钩的连挂稳定性, 提出了多边形接触模型, 模拟车钩连挂面之间的接触和摩擦, 即钩头轮廓面表层采用多边形建模, 以判定接触区域, 并对接触区域进行离散化处理, 通过弹性基础模型求解接触力, 由法向接触力和切向相对速度决定对应的摩擦力, 结合《机车车辆车钩连接轮廊》(TB/T 2950—2006)、干涉分析和有限元计算验证了建模方法的可靠性; 组建了能够反映中部机车动力学特性及其钩缓装置动态行为的重载列车动力学模型, 对列车在不同工况下通过1.2%长大下坡道和300m半径曲线时机车车辆间车钩的连挂稳定性进行了分析。分析结果表明: 车钩力对车钩连挂面之间的相对运动具有较大的影响, 稳定的车钩力能够使车钩连挂面之间产生法向接触力, 若车钩连挂面之间存在相对运动或相对运动的趋势时, 便会产生相应的切向摩擦力以阻止连挂车钩之间的相对运动, 当车钩力出现波动或者较小时, 连挂车钩容易处于自由间隙状态, 因此, 不足以产生足够的约束作用而出现较大的相对运动, 此时的最大垂向相对位移达到149.5 mm, 在通过300 m半径曲线时, 水平面内也会产生最大为4.5°的相对转角以补偿车钩的偏转行为。
更多>
2016, 16(6): 48-54.
摘要
(
4237
)
HTML
(
447
)
PDF (1432KB)
(
3731
)
引用
(
)
永磁同步电机开路故障容错补偿控制
白洪芬
,
朱景伟
,
秦俊峰
摘要:
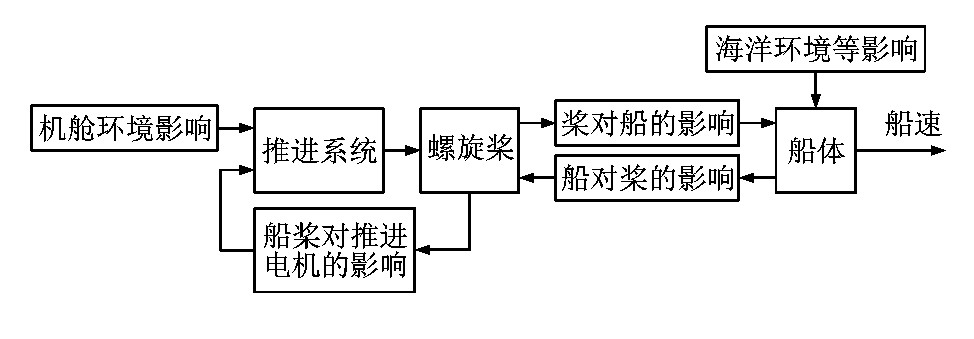
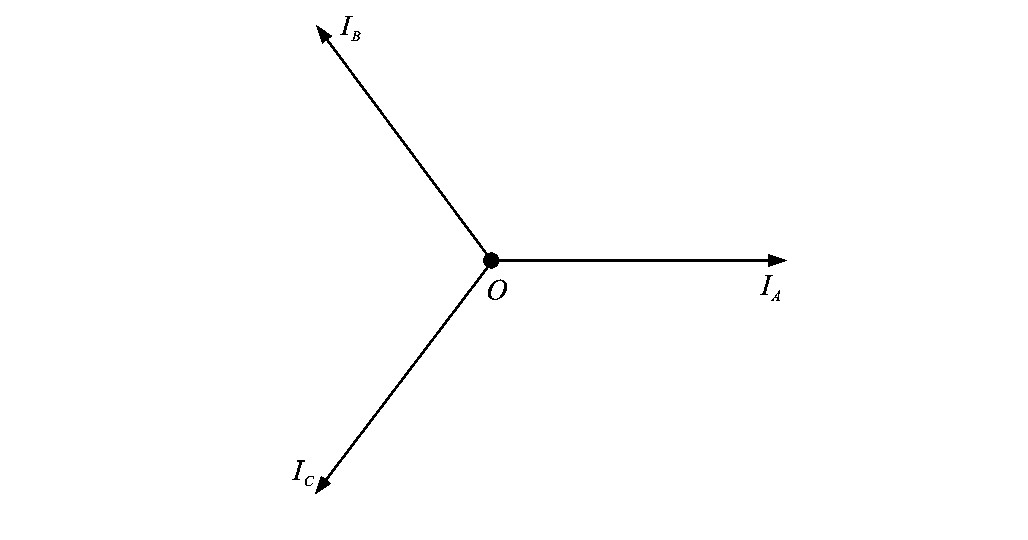
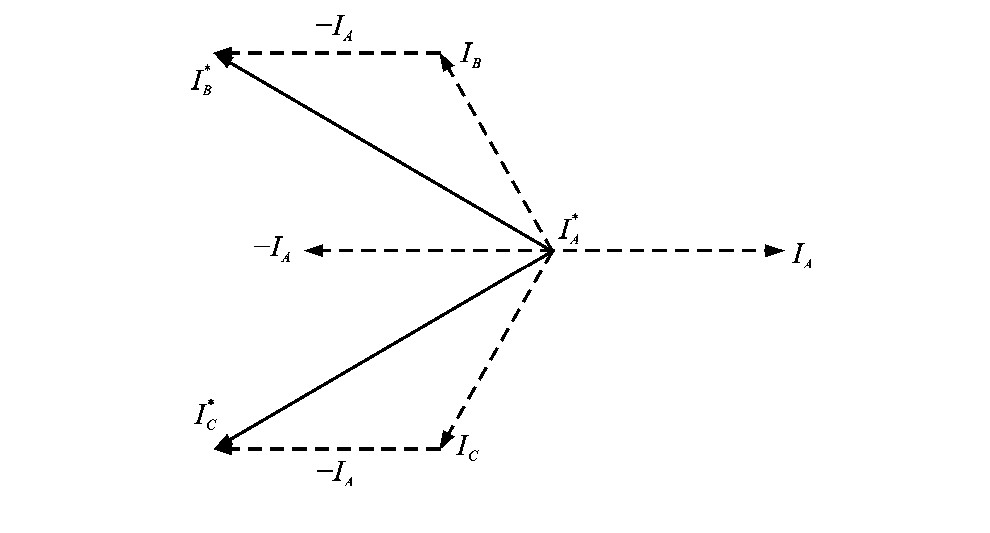
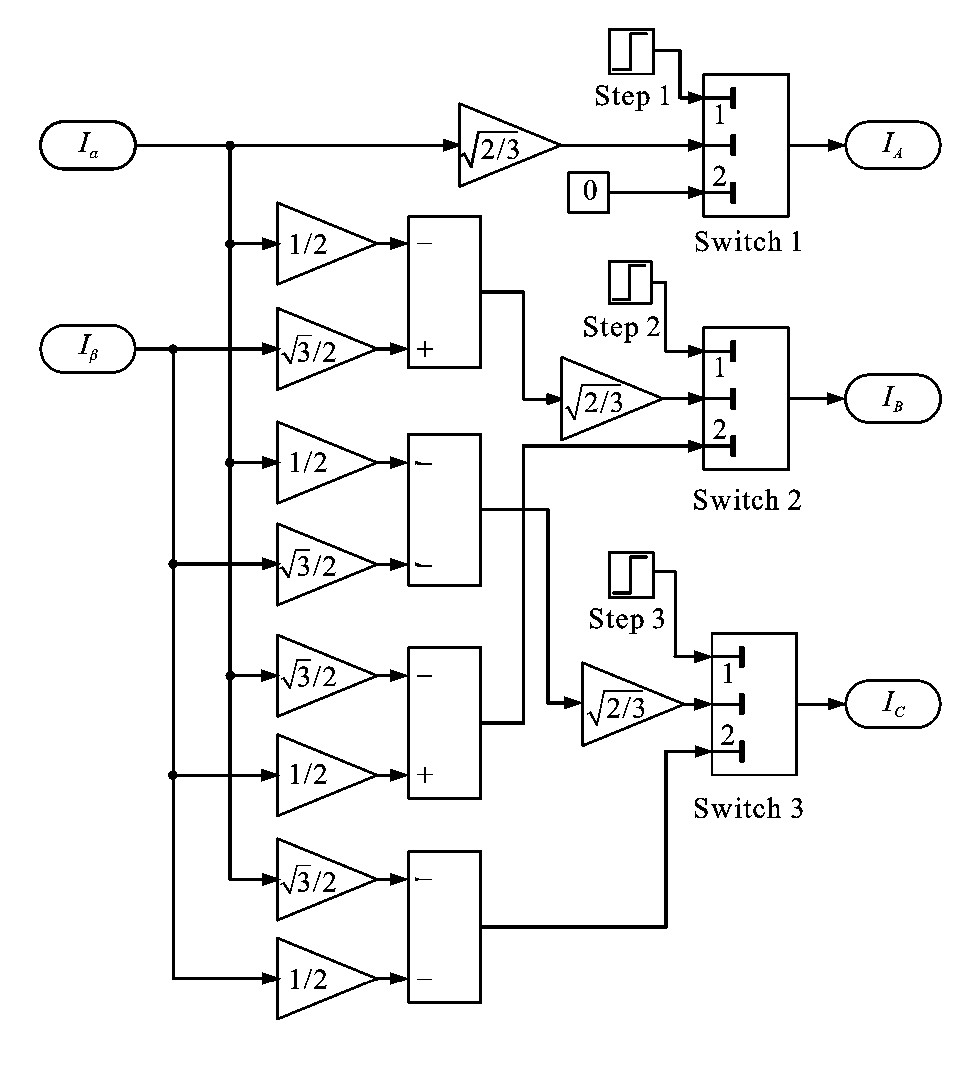
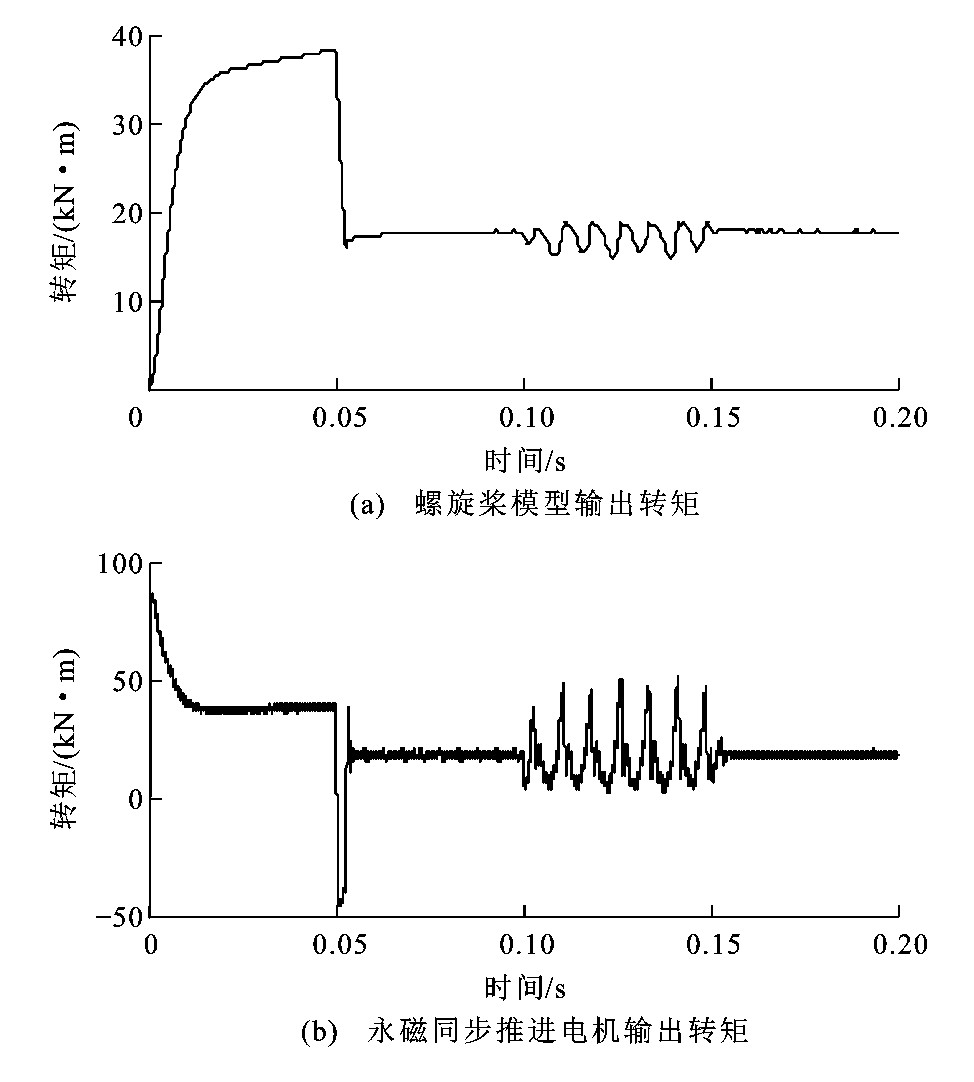
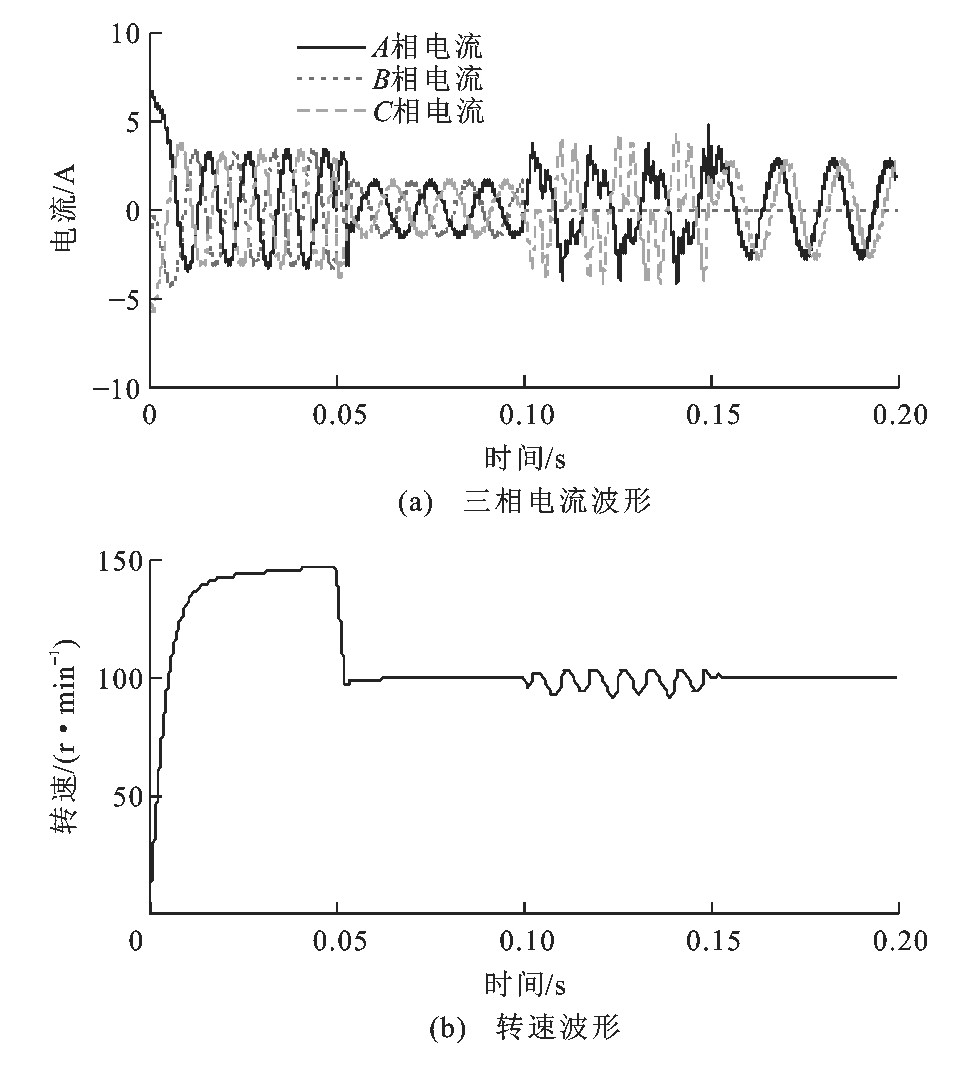
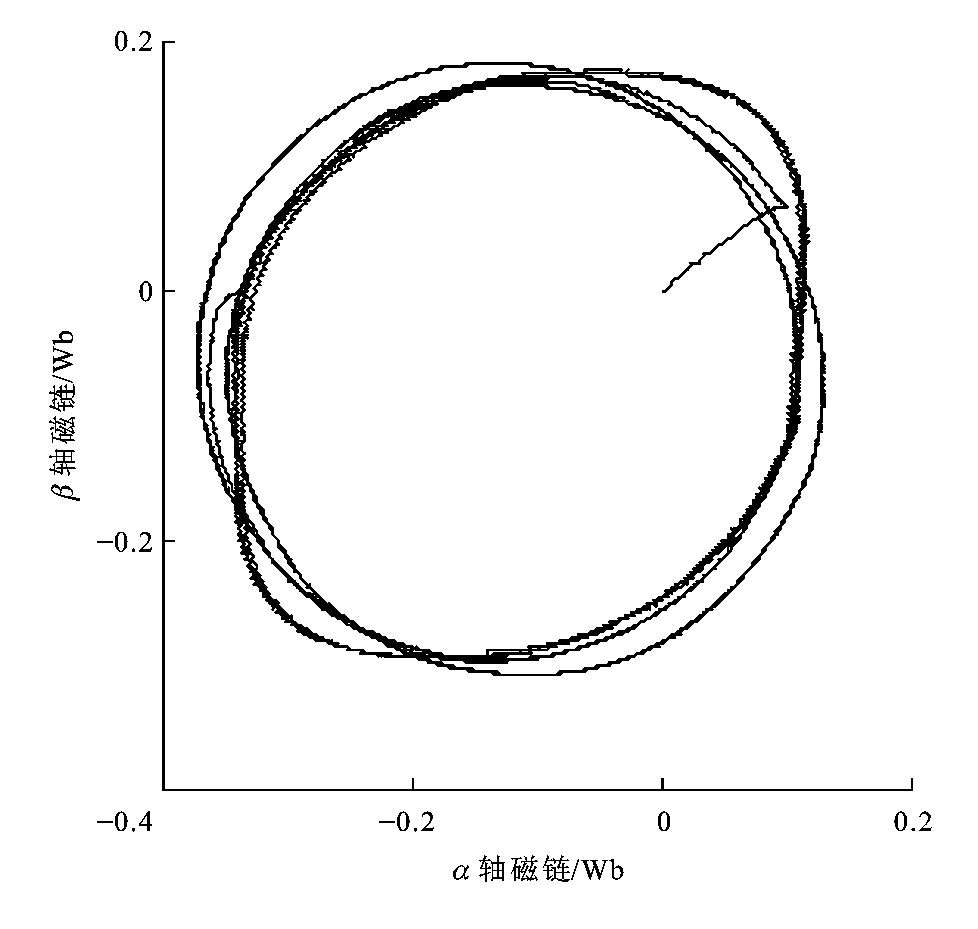
基于磁动势不变原则的故障容错补偿控制策略, 在研究正常情况下船用永磁同步电机磁动势数学模型的基础上, 建立了一相开路故障下磁动势数学模型。在电机发生一相开路故障时, 通过改变其余无故障两相电流的大小和夹角, 以保证故障前后电机的合成磁动势不变, 进而使得空间电压矢量脉宽调制控制策略在电机控制中仍适用。结合船舶电力推进系统模型, 在MATLAB/Simulink中建立船舶电力推进系统的整体仿真模型, 并对转矩、转速、电流等参数进行分析。仿真结果表明: 在无故障情况下, 螺旋桨模型输出转矩脉动和电机的转矩、电流、转速脉动分别约为0.85%、5.90%、6.25%、2.01%, 电机运行性能良好。在一相开路故障下, 若未采用容错补偿控制策略, 螺旋桨对故障响应较为强烈, 输出转矩脉动达到22.2%, 进而导致推进电机输出转矩、电流、转速均出现较大的波动, 分别约为82%、50%、33%, 且电机定子磁链轨迹为不稳定的椭圆; 采用基于磁动势不变原则的矢量容错补偿控制策略后, 螺旋桨输出转矩会恢复到稳定值, 脉动约为1.02%, 推进电机也会重新稳定运行, 转矩、电流及转速脉动均明显下降, 分别约为6.20%、6.78%、2.22%, 与无故障时的脉动范围基本相同, 电机定子磁链轨迹恢复为同故障前一致的圆形。可见, 采用故障容错补偿控制策略, 可以保证推进电机在正常情况和一相绕组开路情况下均能正常工作, 且螺旋桨负载与推进电机性能匹配良好。
更多>
2016, 16(6): 55-62.
摘要
(
4251
)
HTML
(
490
)
PDF (683KB)
(
3689
)
引用
(
)
基于时间延迟模型的多目标优化检查决策方法
陆晓华
,
左洪福
,
白芳
摘要:
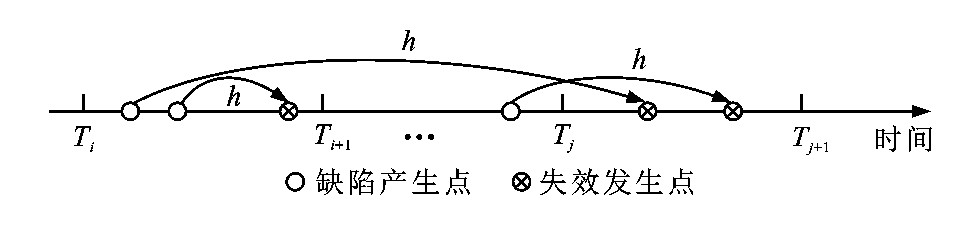
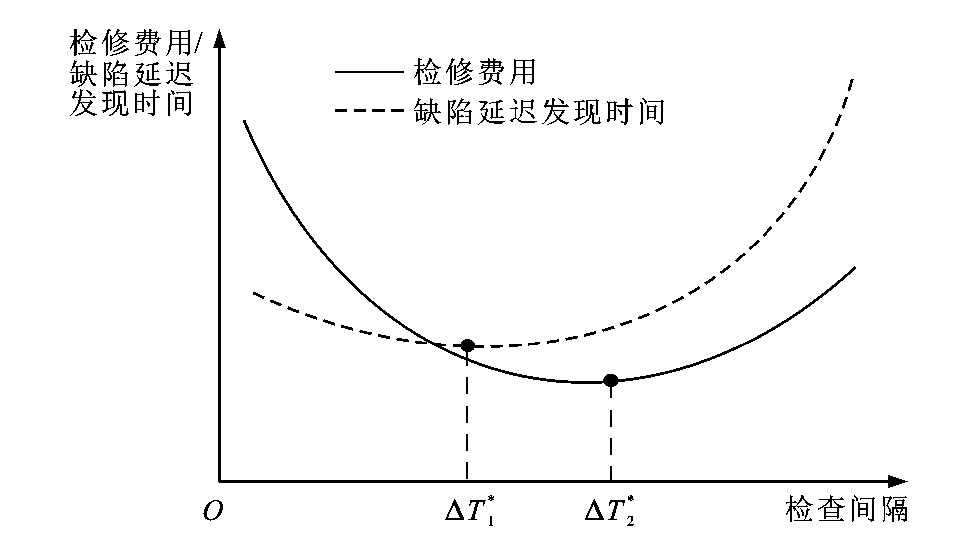
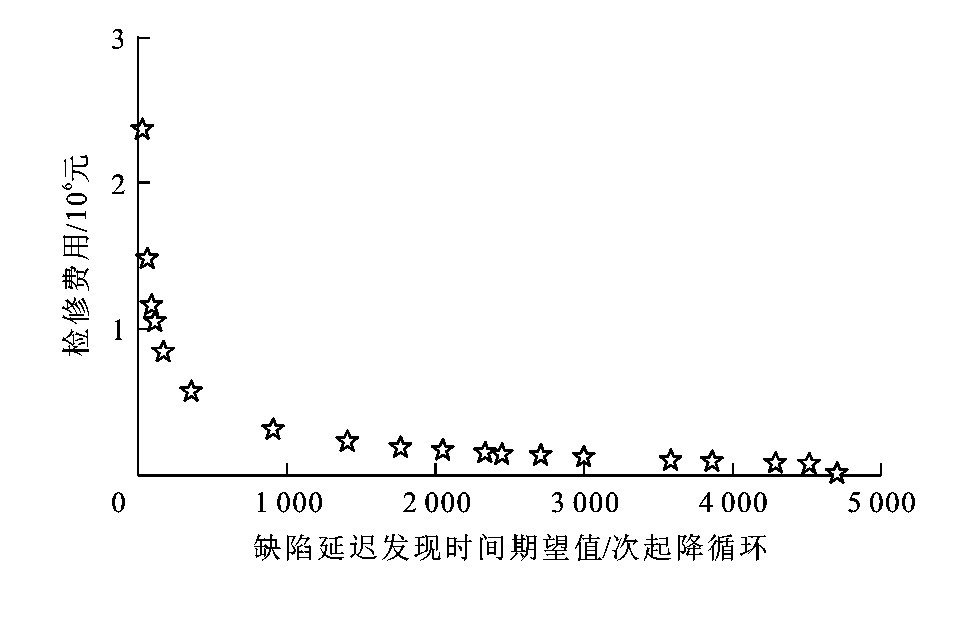
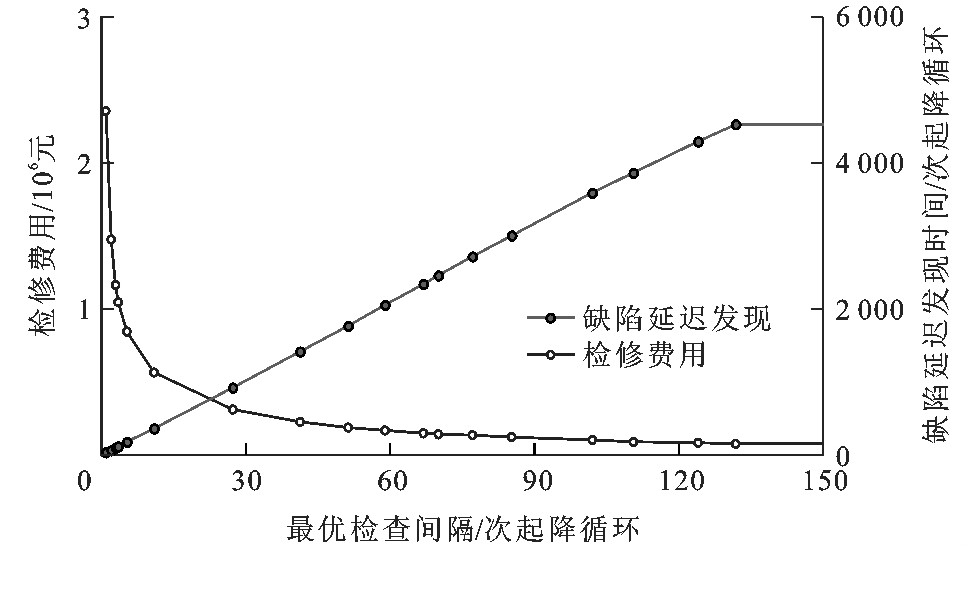
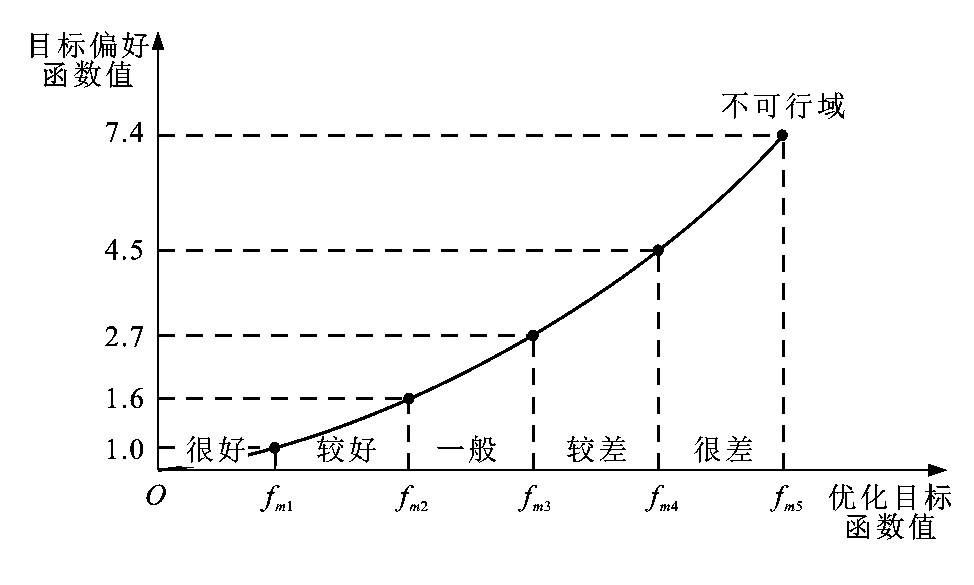
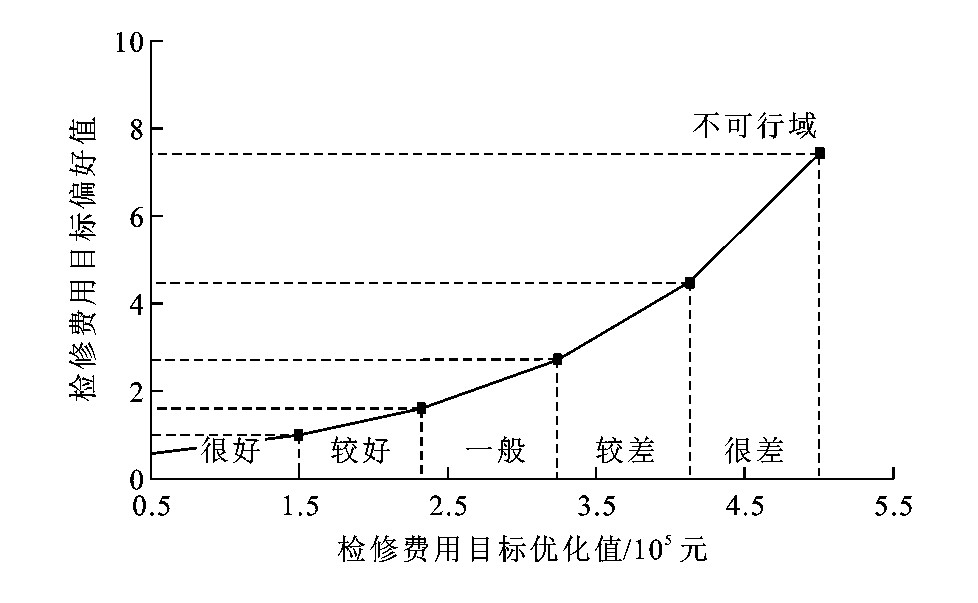
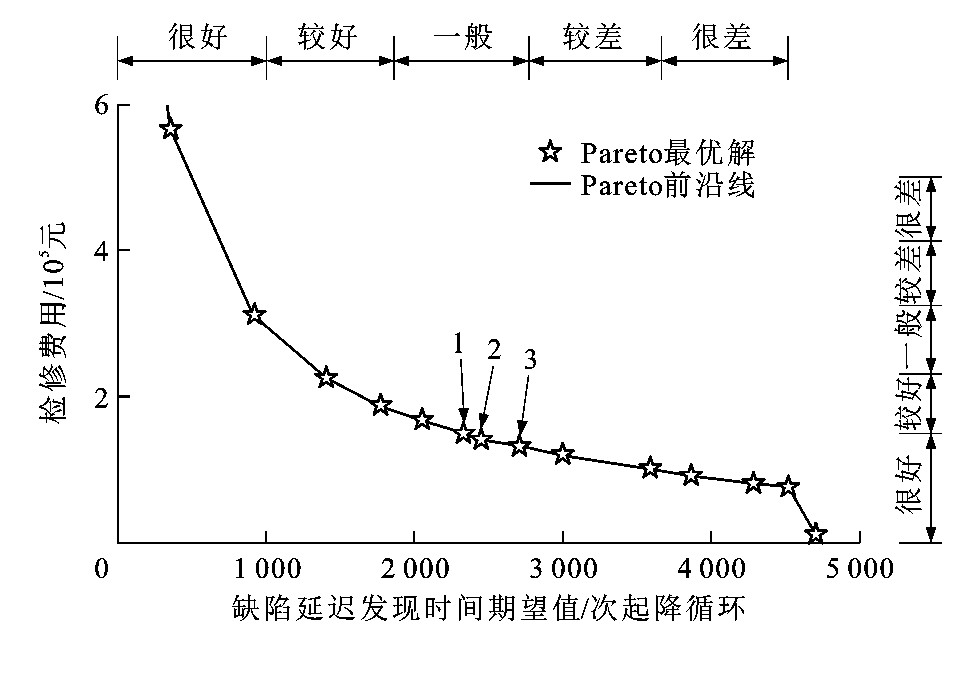
根据某航空公司货运机队的某型发动机HPTACC系统在某一周期内的预防性检查计划、检查发现的缺陷以及失效维修记录, 分析了系统在运行过程中将缺陷延迟发现时间作为安全性优化目标、将检修费用作为经济性优化目标的可行性。在预防性检查时刻发现缺陷的检修策略下, 推导了在各检查时刻基于时间延迟模型的缺陷数期望值和缺陷延迟发现时间期望值概率计算式。在缺陷退化为失效被及时发现并进行更换维修的检修策略下, 推导了在各检查间隔期内基于时间延迟模型的失效发生次数期望值概率计算式。基于2种检修策略下的概率公式, 建立了系统在给定寿命周期内的似然函数, 建立了检修费用和缺陷延迟发现时间的期望值双优化目标函数式, 运用了改进的非支配排序遗传算法优化得到双目标函数的Pareto最优解集。根据决策者的目标偏好及其分界值对应的检修费用及缺陷延迟发现时间的经验估计值, 分别确定了系统在寿命周期内的检修费用和缺陷延迟发现时间的目标偏好函数, 通过目标偏好函数划分区间确定Pareto最优解集中各最优解的偏好区间。基于收集的检修信息和提出的方法, 对决策者将缺陷延迟发现时间期望值目标偏好定为一般、将检修费用期望值目标偏好定为很好的偏好要求进行实例分析。分析结果表明: 最优检查间隔决策约为67、70或77次起降循环, 这些检查间隔为决策者进行多目标相对最优的精确决策提供细化和更精简的选择参考。
更多>
2016, 16(6): 63-71.
摘要
(
4252
)
HTML
(
647
)
PDF (682KB)
(
3795
)
引用
(
)
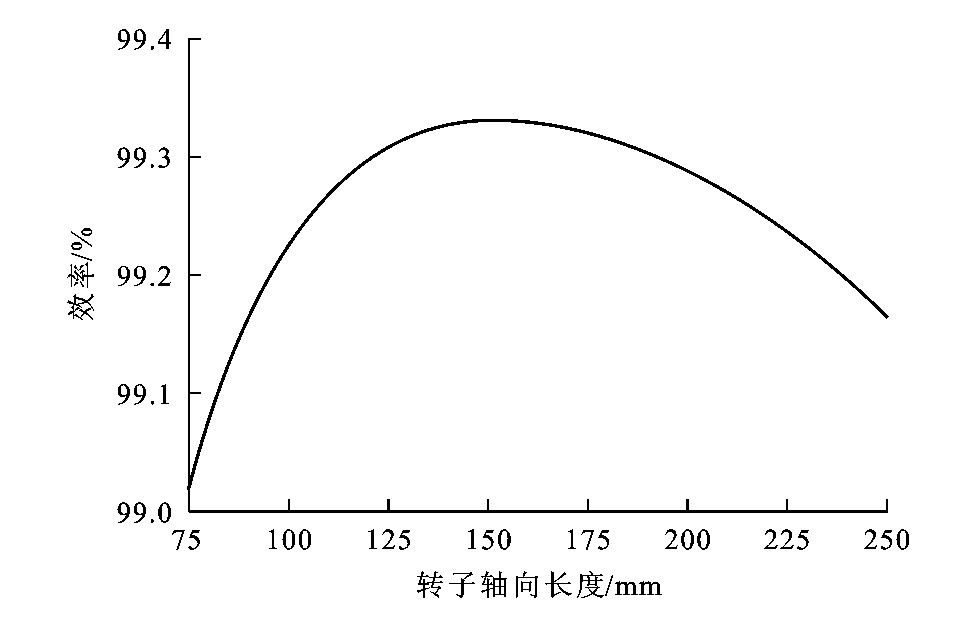
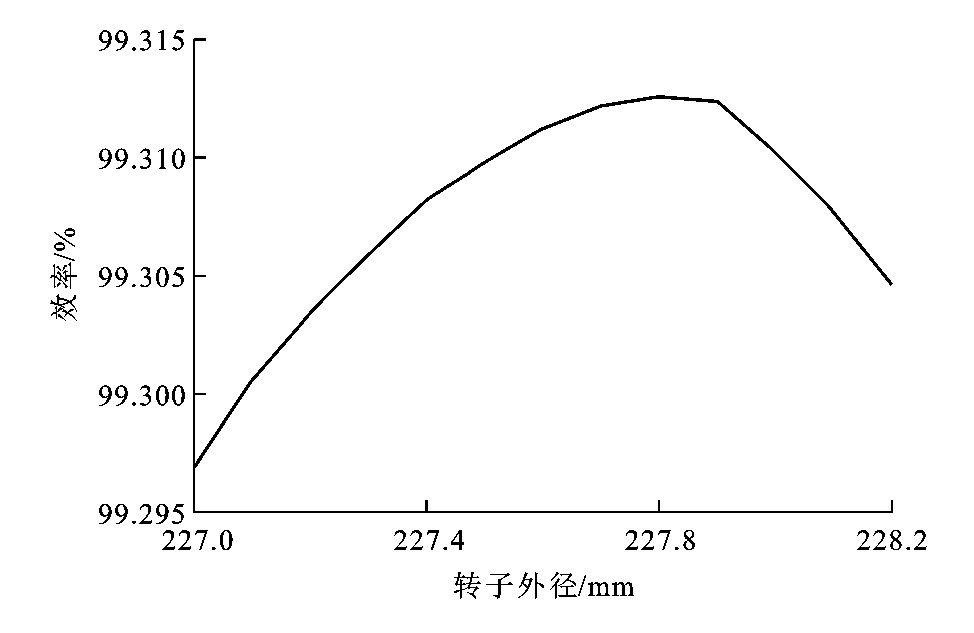
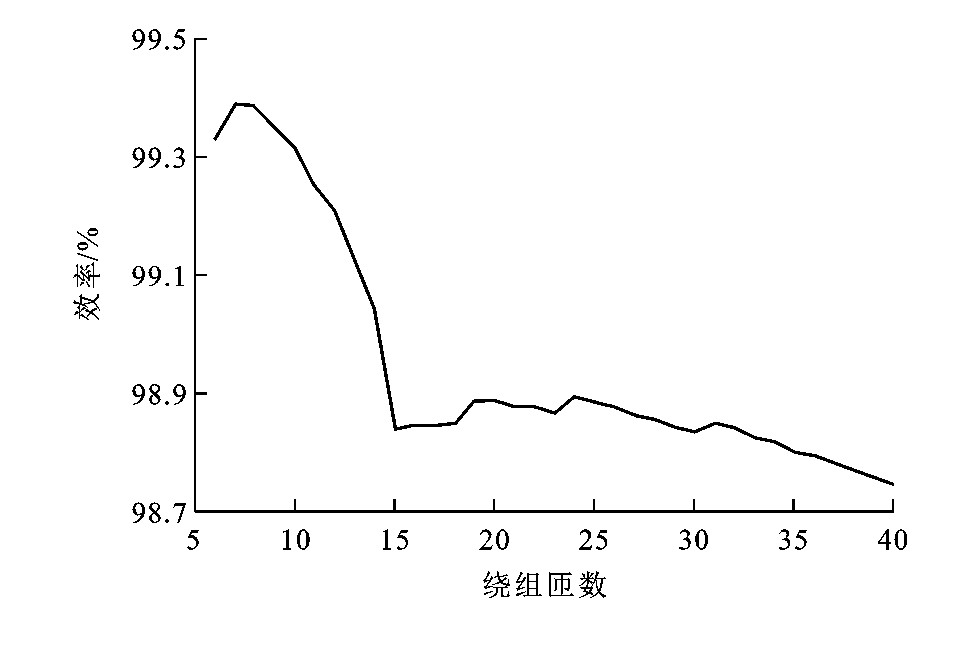
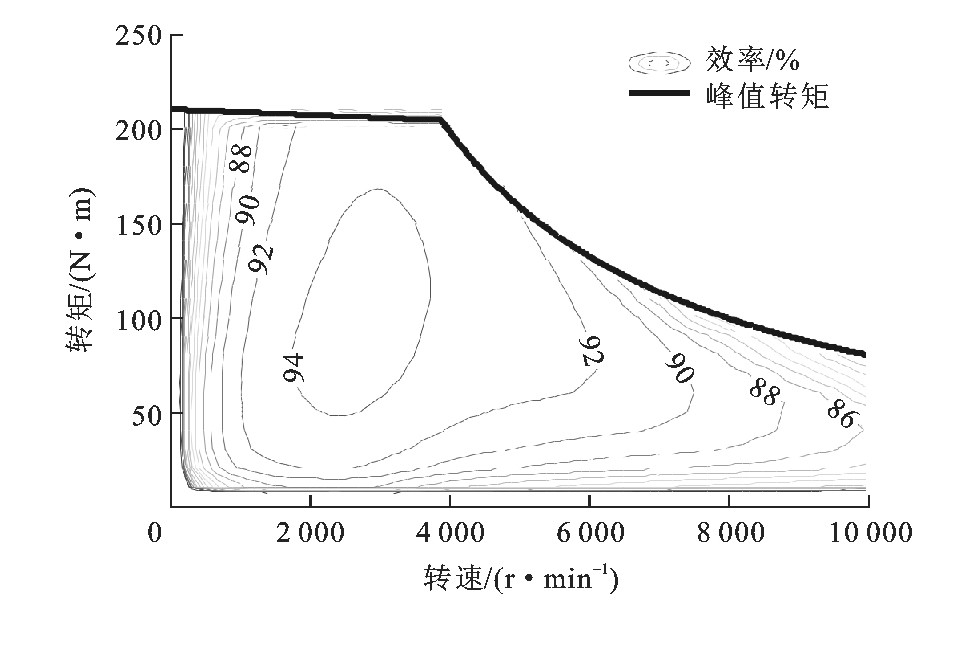
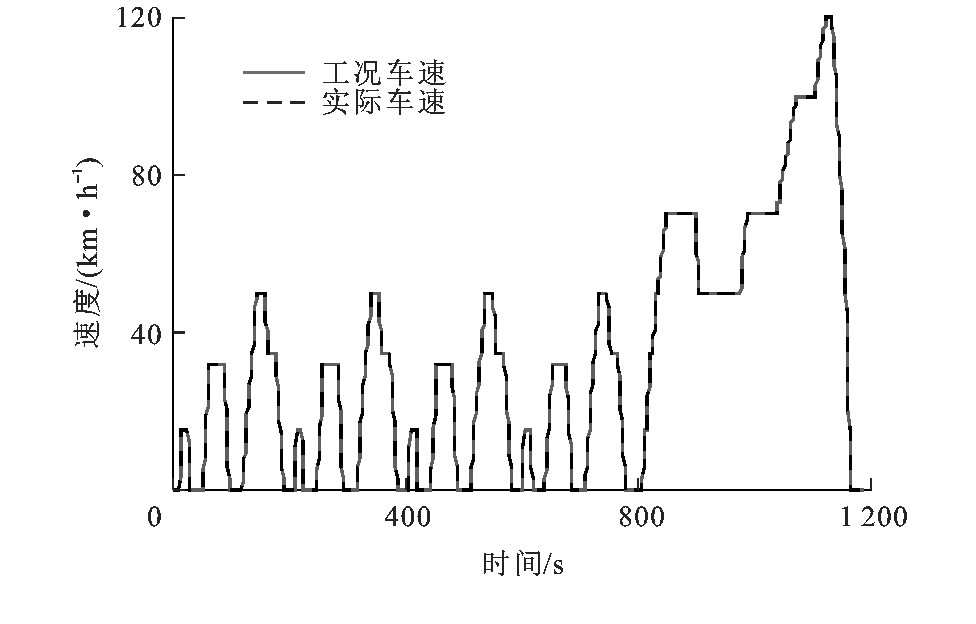
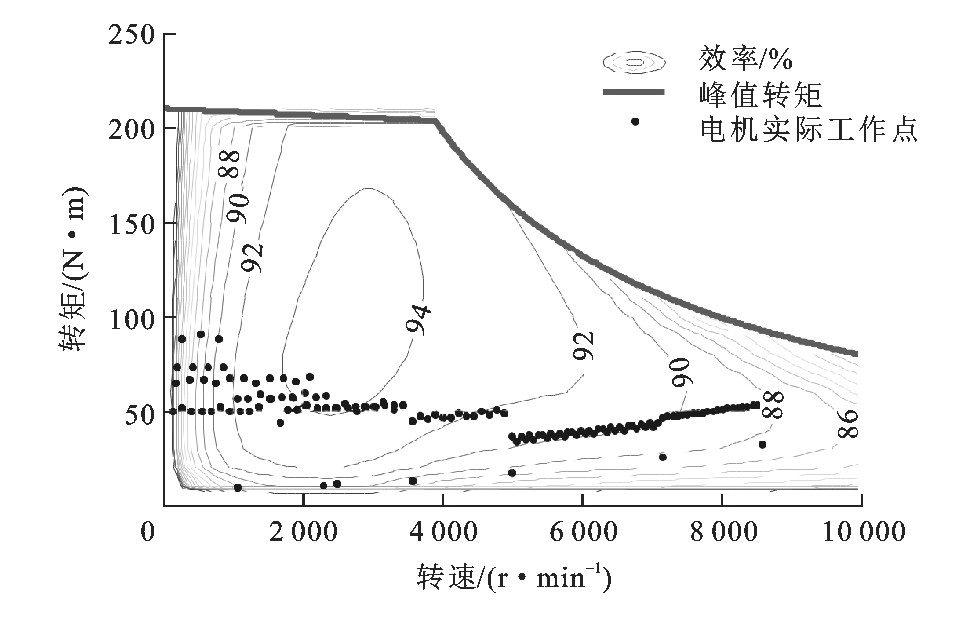
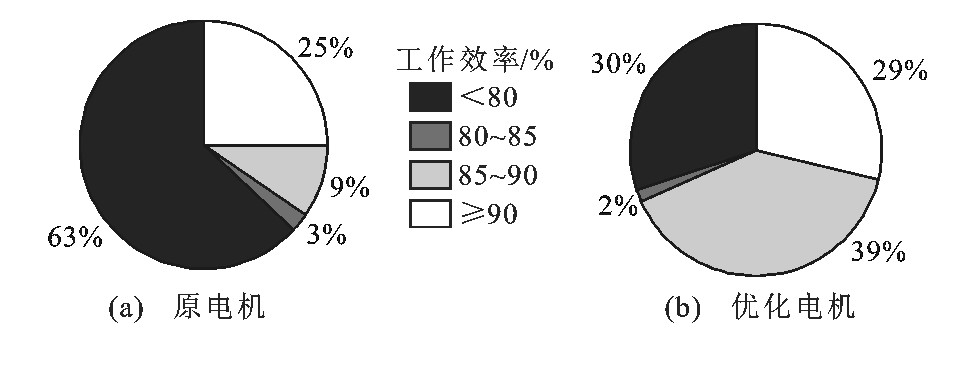
电动汽车驱动电机结构参数优化设计
王军年
,
刘健
,
初亮
,
王庆年
,
吴坚
摘要:
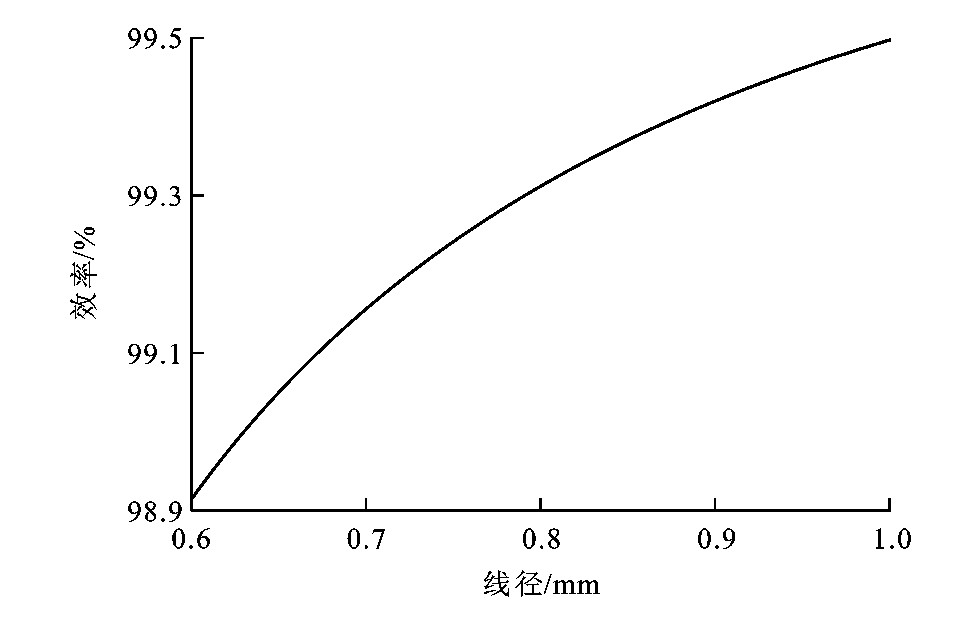
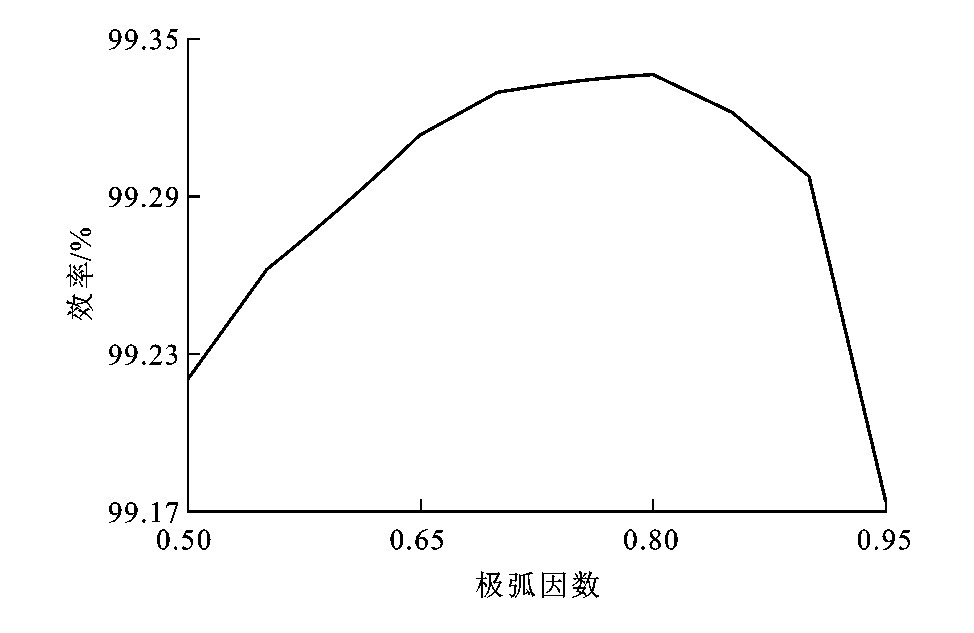
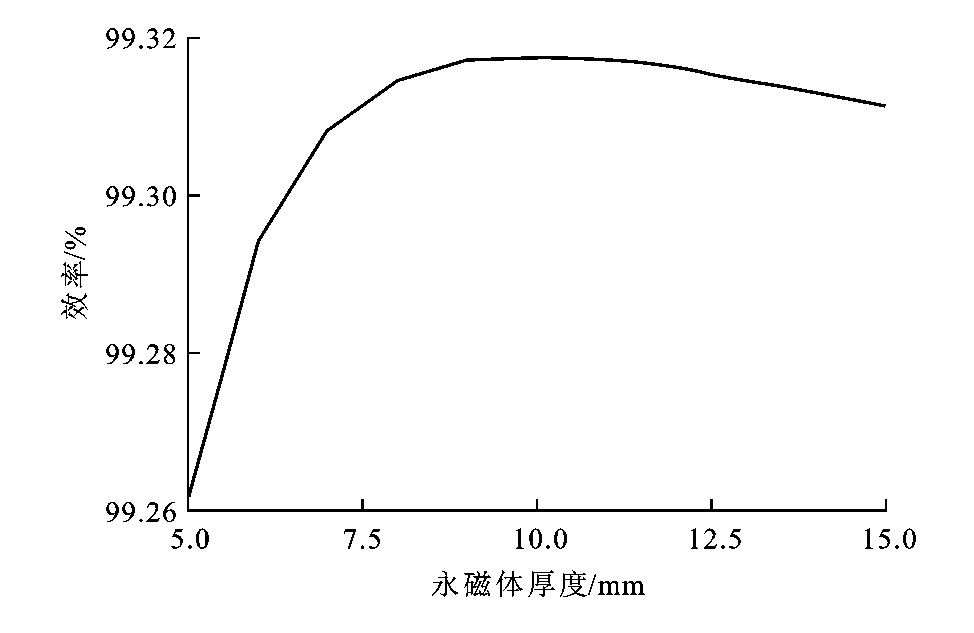
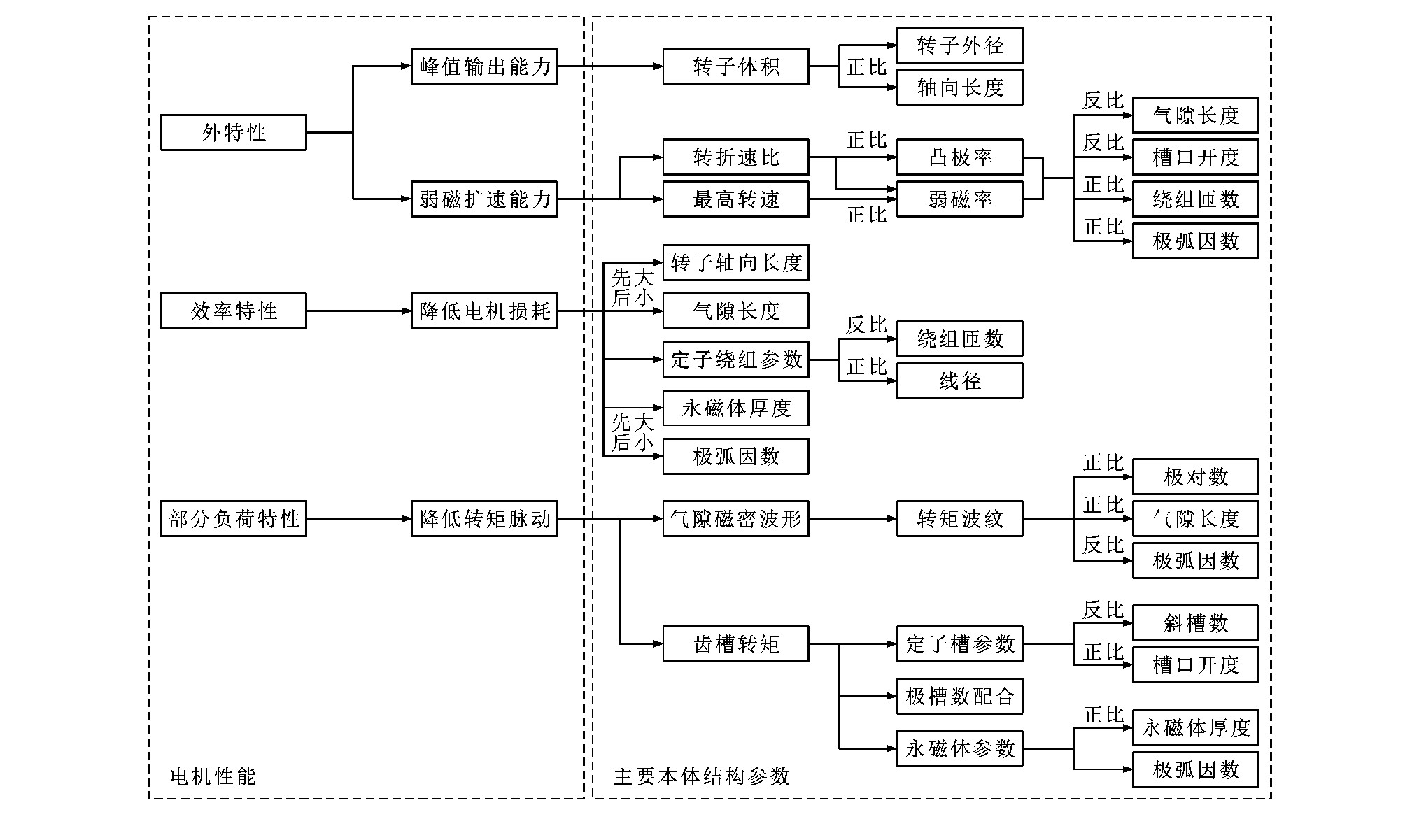
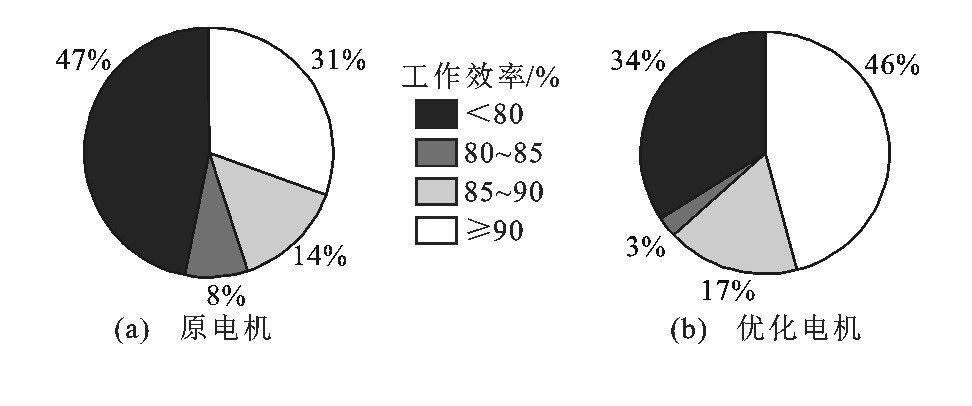
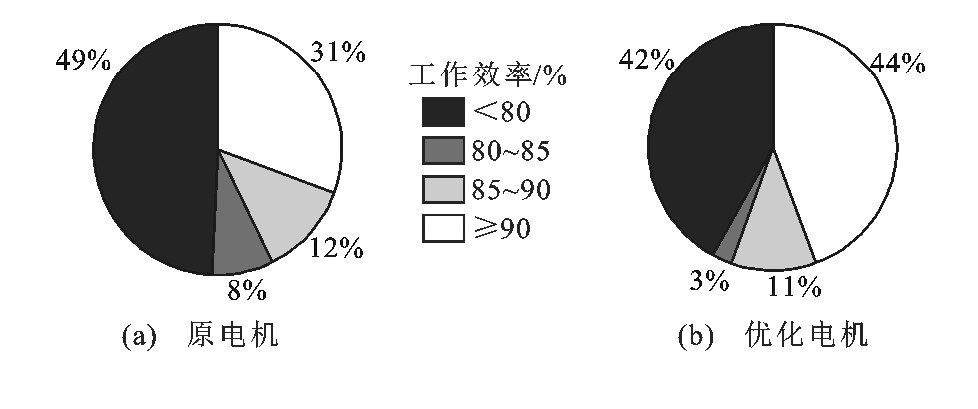
在研究电动汽车驱动电机参数匹配过程中, 提出了一种驱动电机结构参数优化设计方法。在已知电机基本参数基础上, 分析了电机轴向长度、转子外径、绕组匝数、线径、极弧因数、永磁体厚度等参数对电机效率的影响。建立了电机主要本体结构参数与效率特性的映射关系, 提出了电机本体结构参数的初始设计和优化设计流程。利用优化设计得到的电机效率特性, 通过正向仿真整车模型, 在4种典型工况下进行了整车的经济性仿真验证。仿真结果表明: 在外特性方面, 优化电机相比初始电机的转矩脉动明显降低, 其中恒转矩区域降低为14%, 恒功率区域不超过40%, 且最高效率提升为94%;在整车经济性方面, 优化电机在NEDC、UDDS、JC08、1015工况使整车单位里程能耗分别降低7.1%、6.7%、4.1%、2.9%, 平均为5.2%。可见, 优化设计方法在满足整车动力性需求的前提下, 改善了电机在高效率区间的工作点分布, 显著提高了电机在高转速、低转矩范围的平均效率; 设计方法能更好地提升电机的驱动效率, 为从整车性能要求出发的电动汽车驱动电机本体结构参数优化设计提供理论指导。
更多>
2016, 16(6): 72-81.
摘要
(
4655
)
HTML
(
617
)
PDF (1739KB)
(
3947
)
引用
(
)
船舶机舱协作式模拟训练智能评估
段尊雷
,
任光
,
张均东
,
曹辉
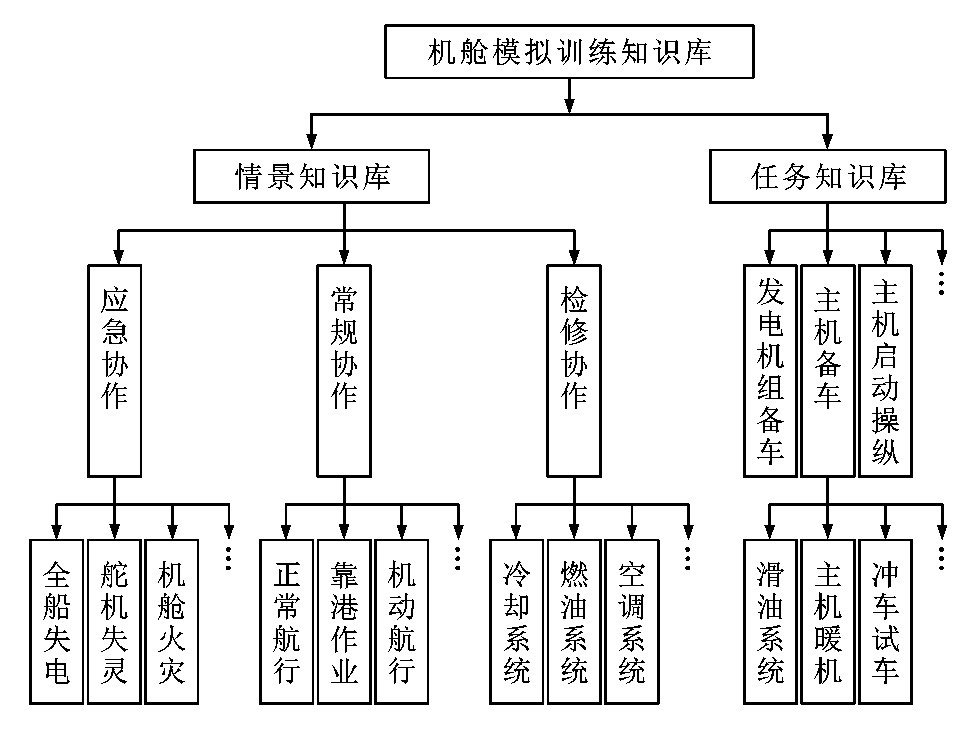
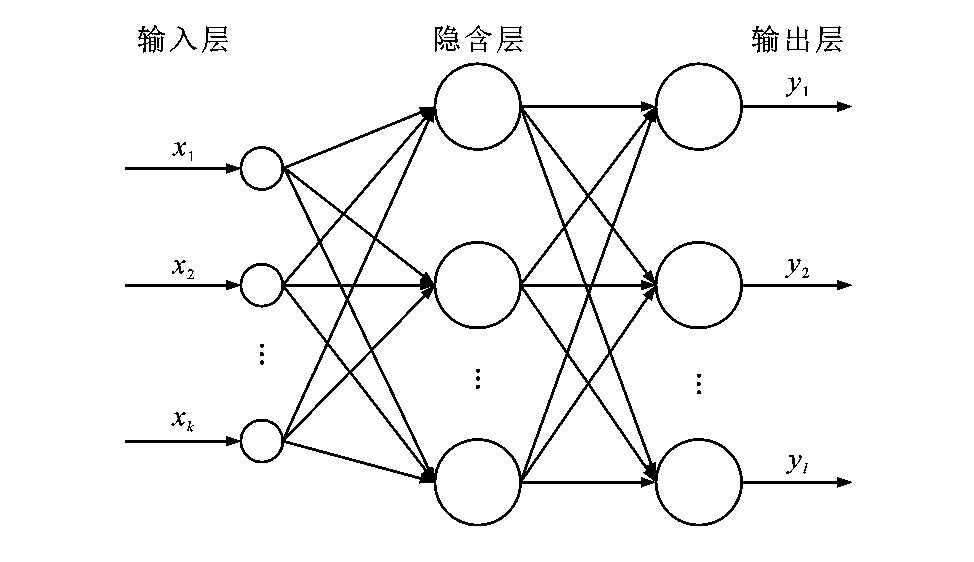
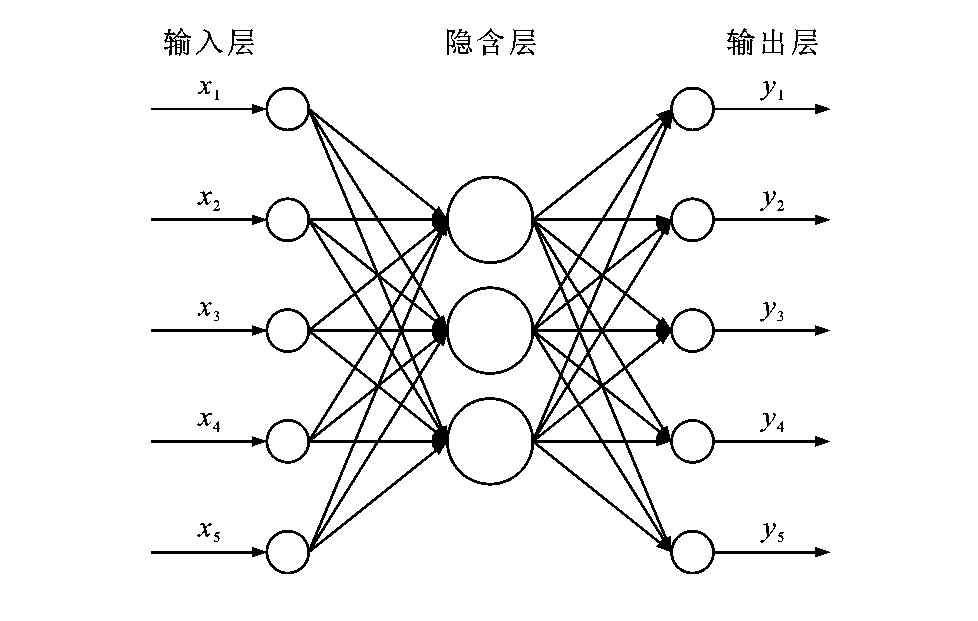
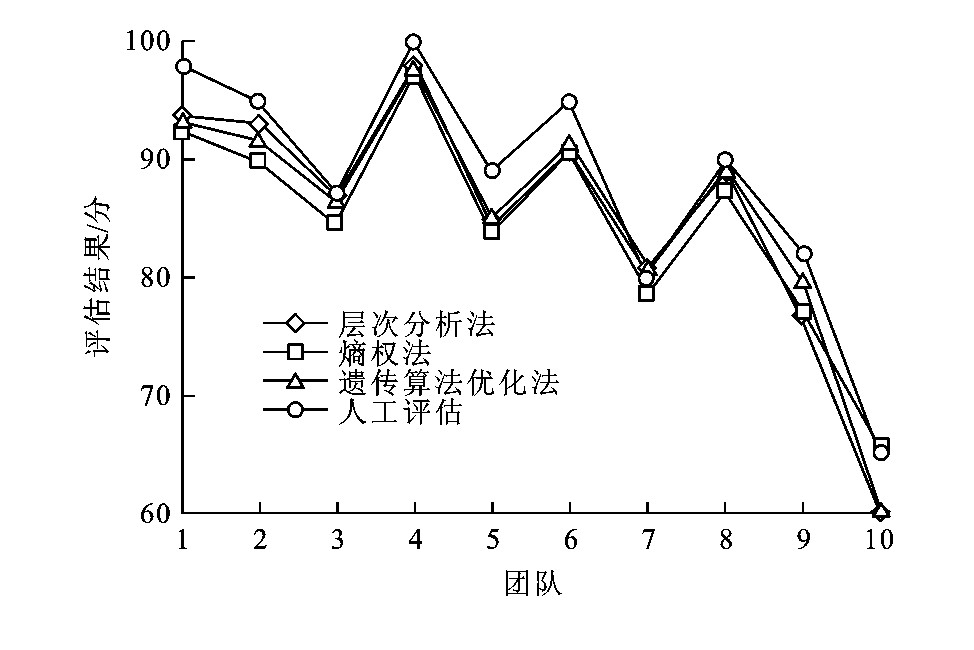
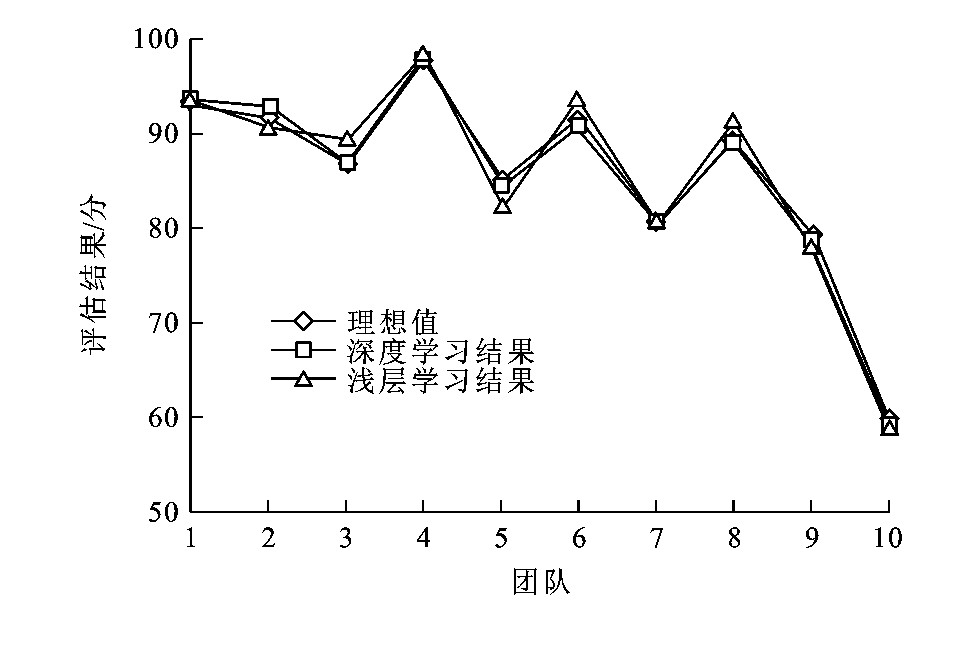
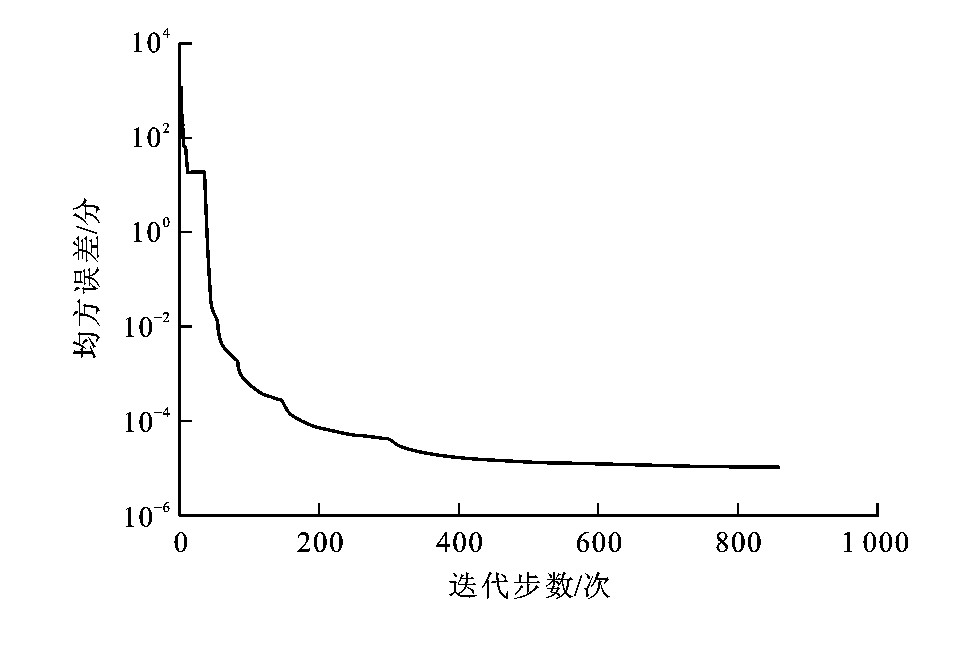
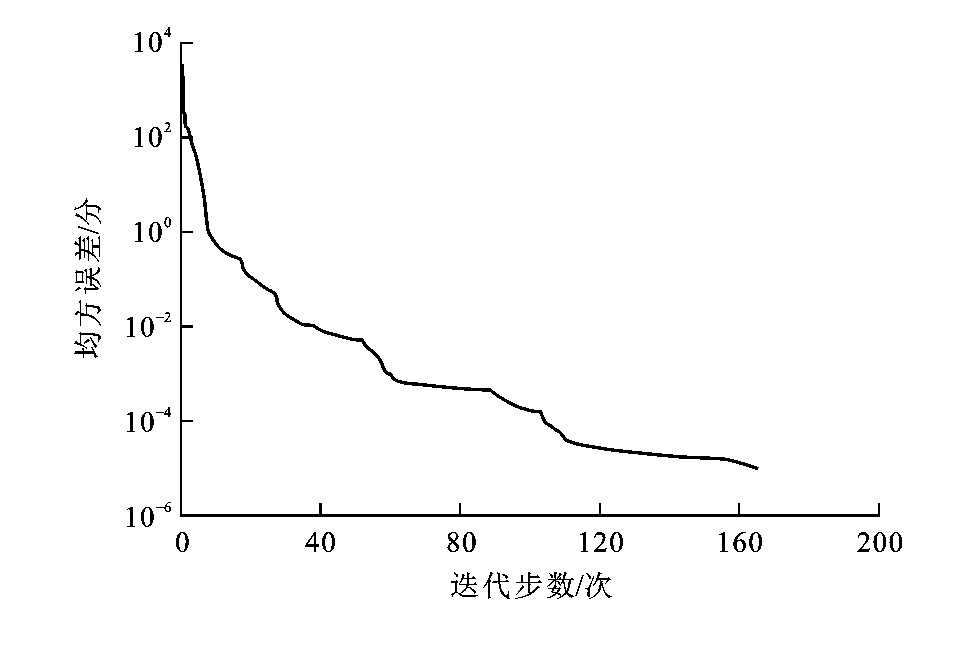
摘要:
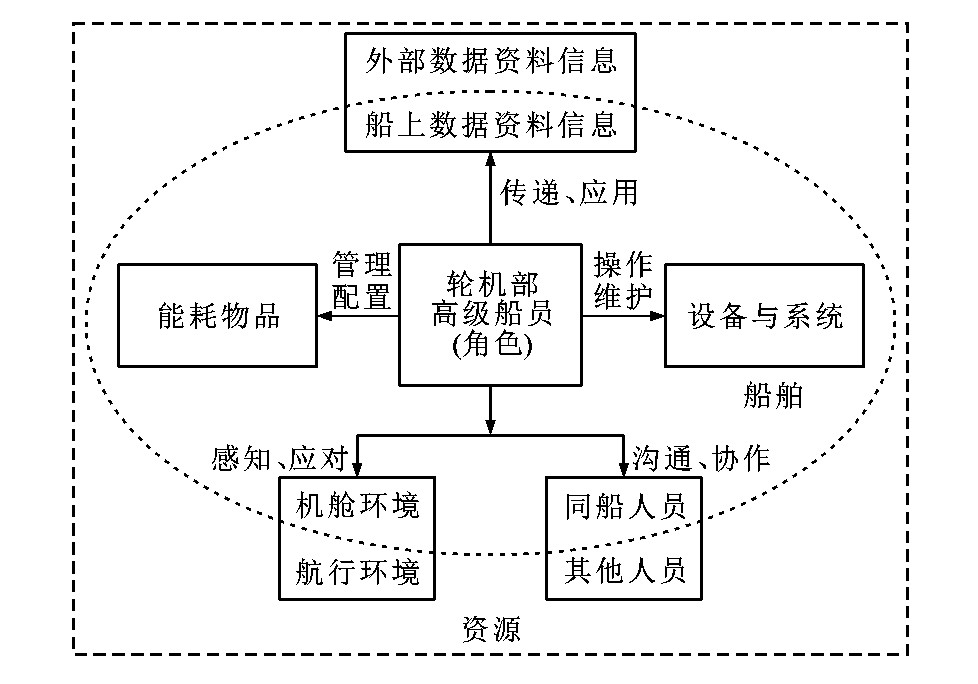
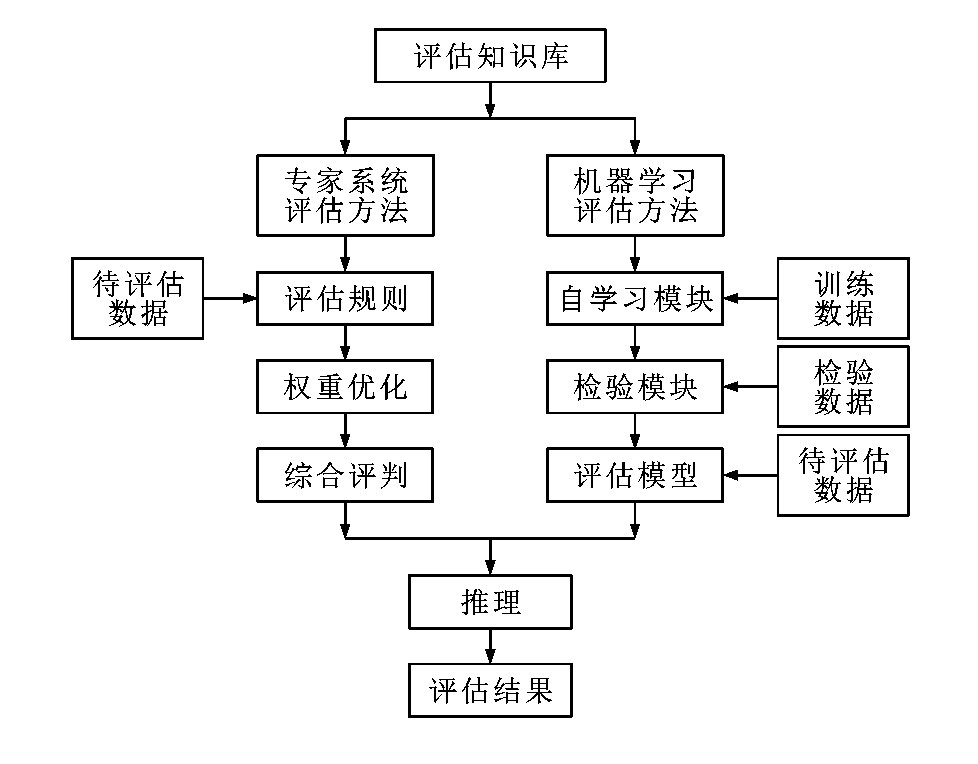
基于人-机-环境系统工程理论, 研究了船舶机舱模拟训练评估问题, 建立了船舶的角色-任务-资源系统协作训练模型, 提出了基于专家系统和机器学习的智能评估方法, 并用于改进三维机舱协作训练系统; 建立了船舶机舱模拟训练情景知识库、任务知识库和评估指标体系, 结合专家经验和评估规范提取评估规则, 采用遗传算法优化后的权重对数据进行多重模糊综合评判; 针对实际的评估问题构造合适的机器学习网络结构, 利用BP神经网络和深度学习算法具备的自学习优势, 以简化运算步骤; 将评估指标数据进行归一化处理后作为评估模型的输入数据, 将评估结果作为目标数据, 采用稀疏自动编码器对大量数据样本进行特征变换, 深入学习样本特征并用于分类评估, 经反复训练后得到较好的评估模型; 对基于专家系统和机器学习的智能评估方法进行了对比分析。分析结果表明: 经遗传算法优化的评估结果误差明显较小, 平均绝对误差为0.761分, 平均相对误差为0.983%, 均方误差为0.938分, 最大误差为2.263分, 最小误差为0.248分; 对于较简单任务的评估, 基于机器学习评估的最大绝对误差为3.521分, 最小绝对误差为0.304分, 较好的深度学习评估网络的所有指标的评估误差均可小于1分。
更多>
2016, 16(6): 82-90.
摘要
(
4696
)
HTML
(
732
)
PDF (566KB)
(
3670
)
引用
(
)
交通运输规划与管理
基于空间聚类分析的南海主要航线提取方法
王加胜
,
刘永学
,
杨昆
,
李满春
,
孙超
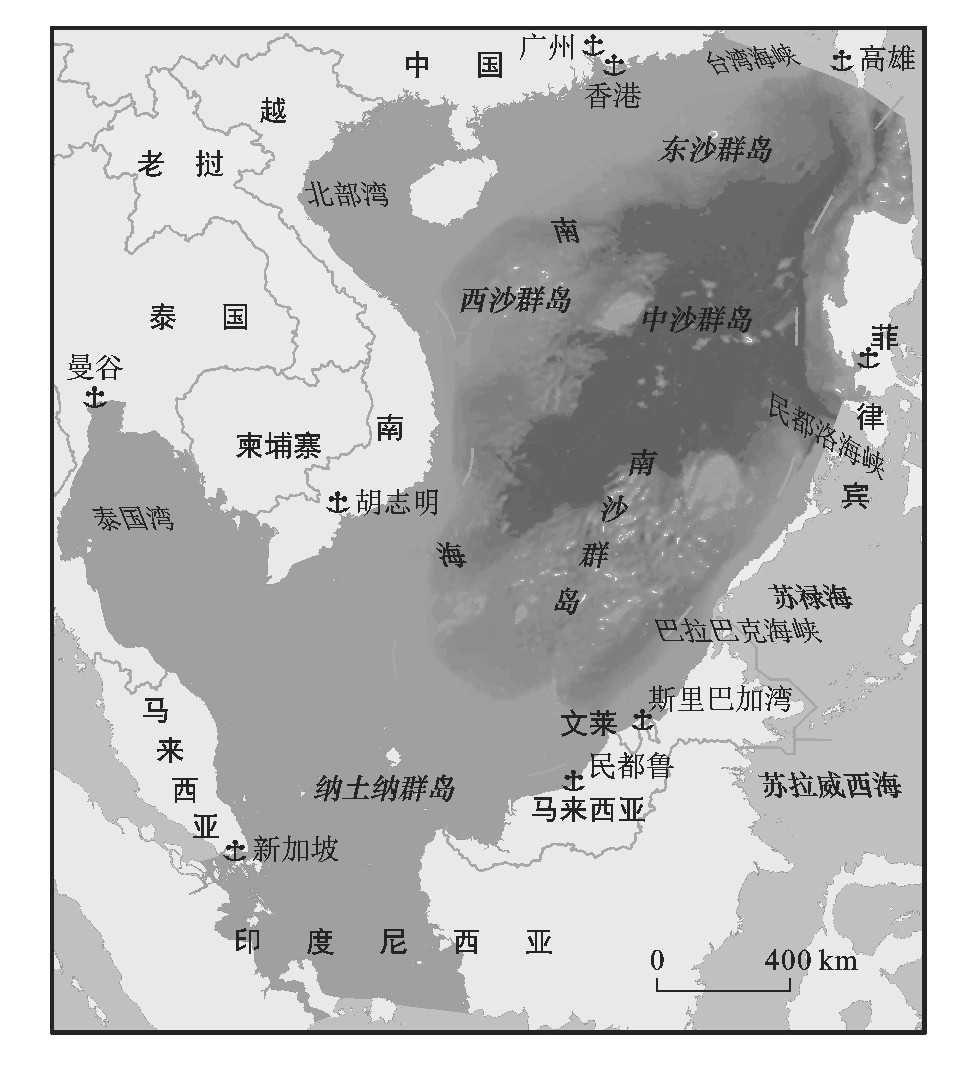
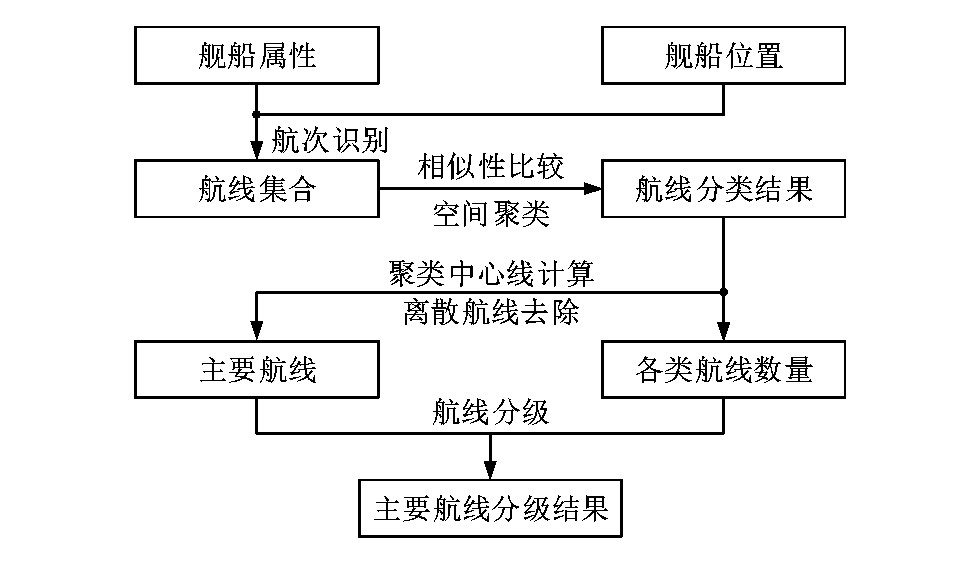
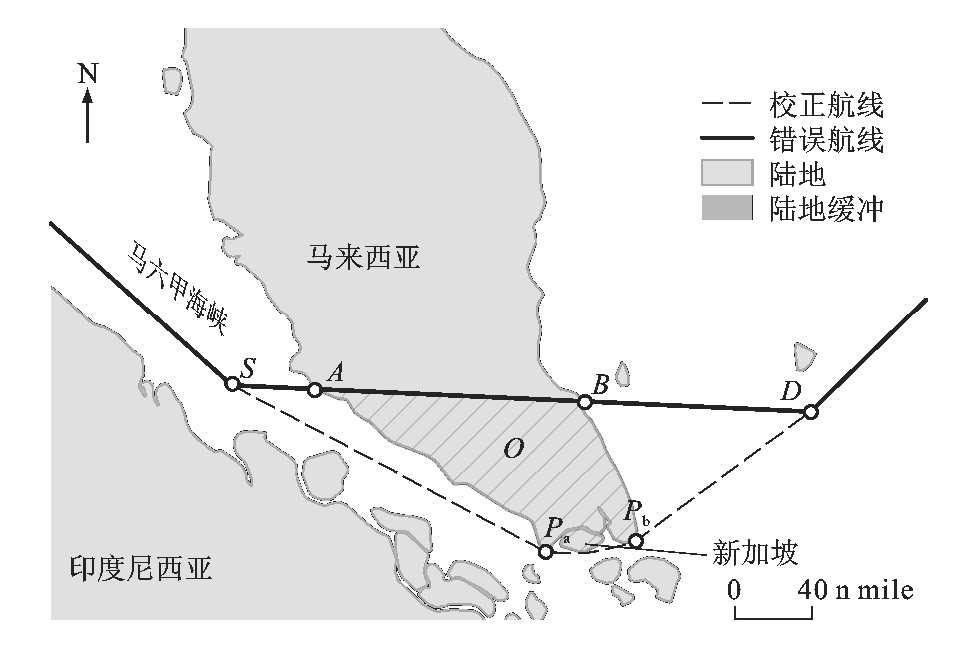
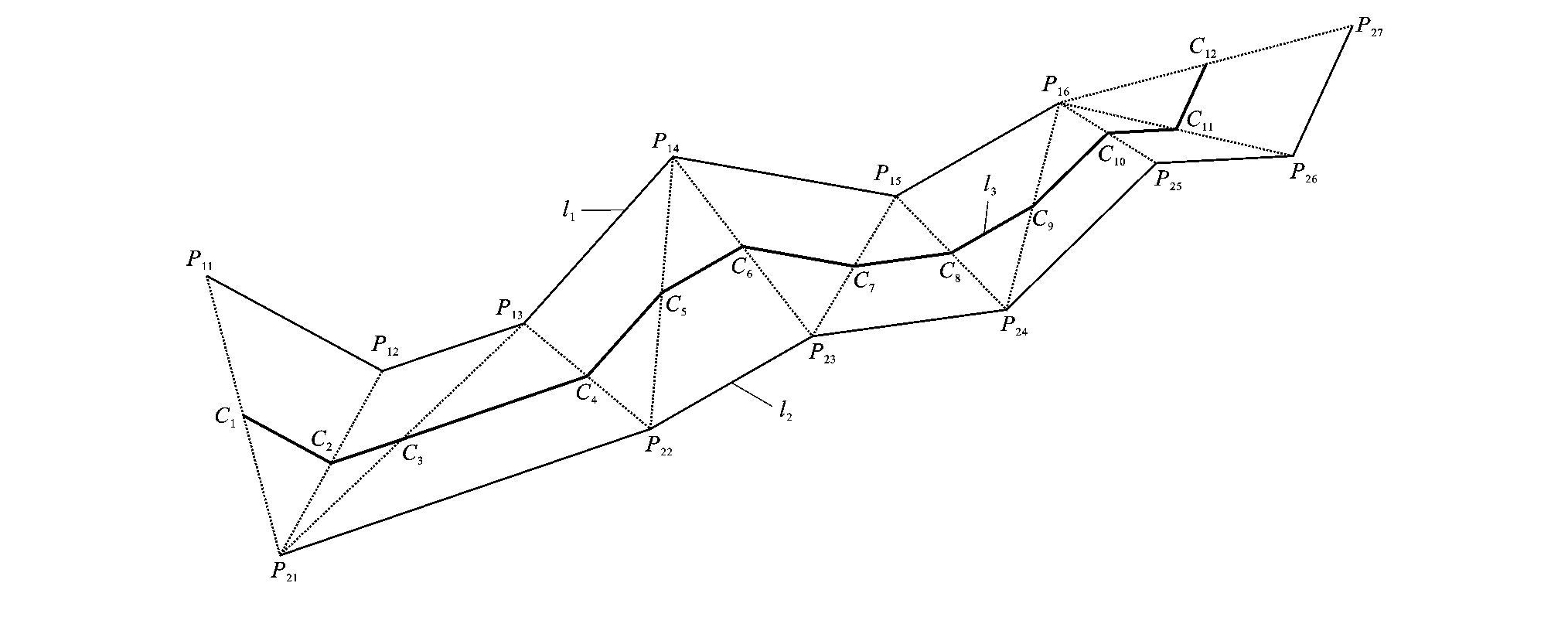
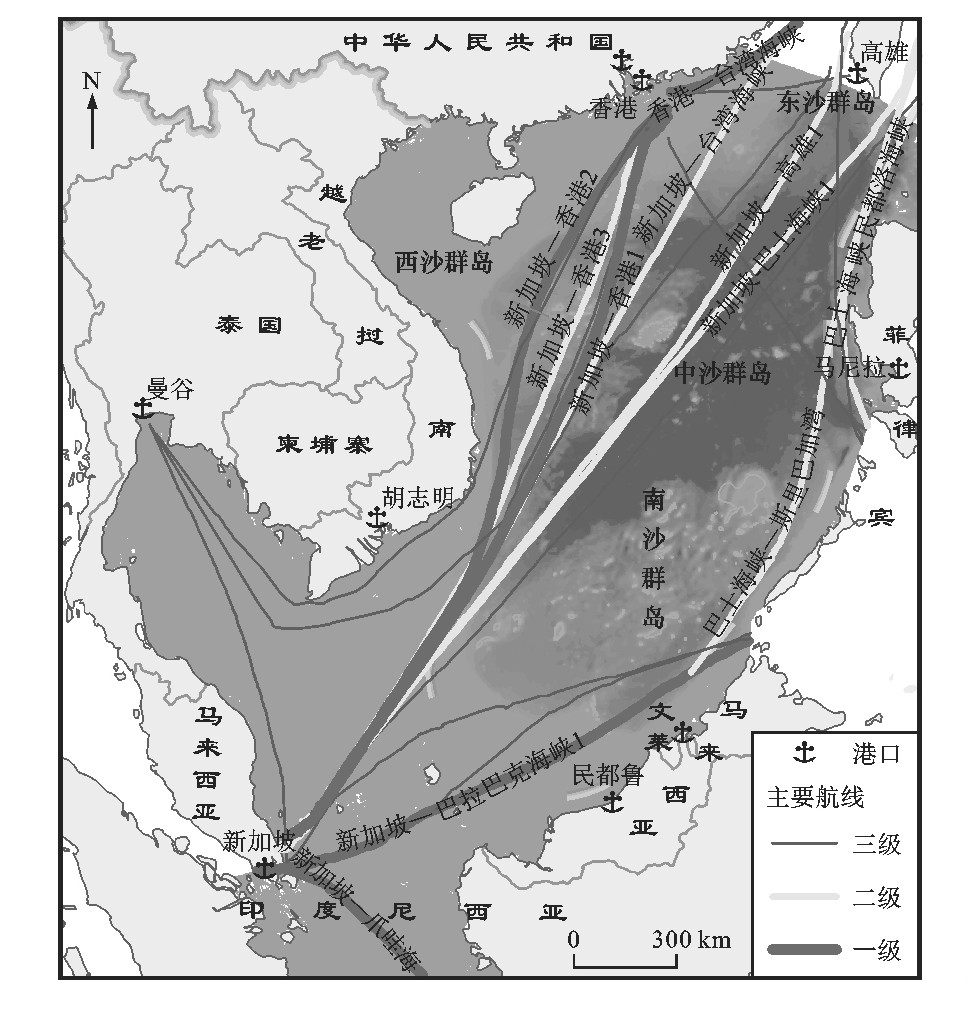
摘要:
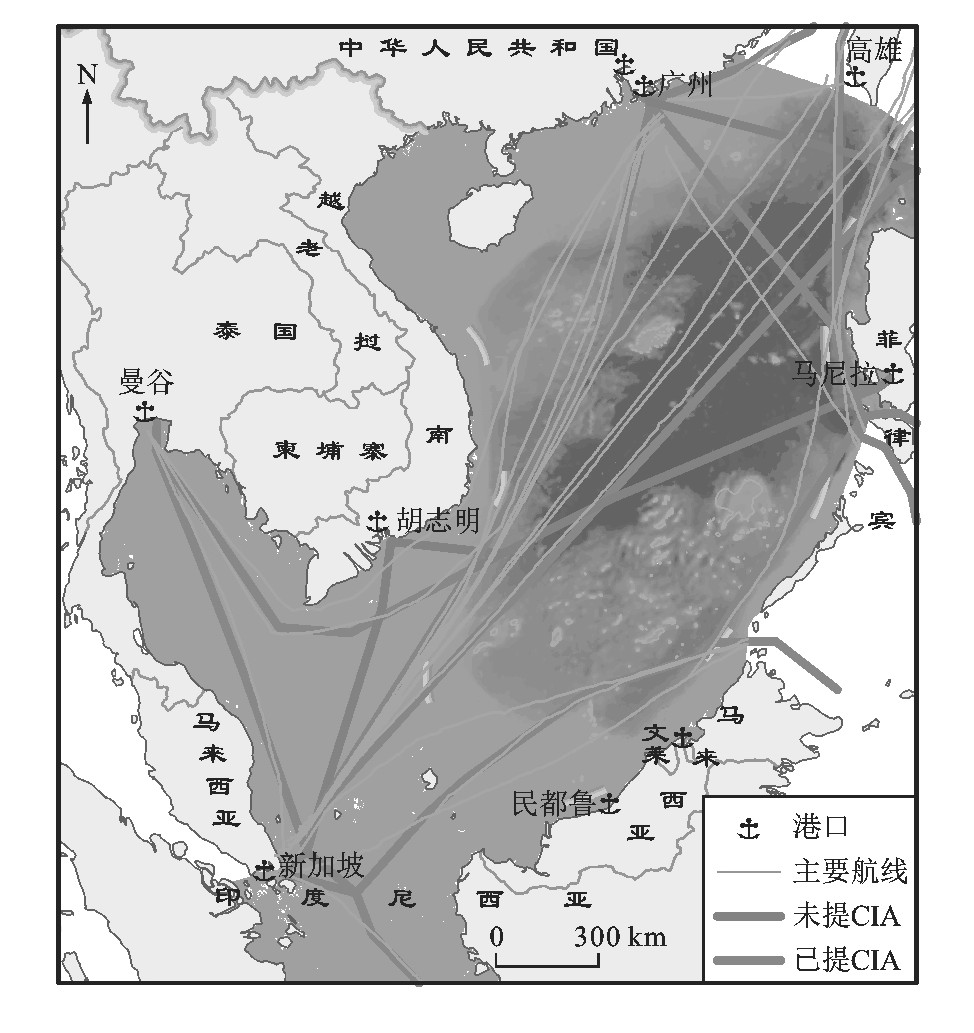
提出了一种基于空间聚类分析的南海主要航线提取方法, 利用2001~2014年VOSClim舰船数据, 通过航线生成、航线聚类、聚类中心线提取得到了南海主要航线提取与分级结果, 将提取结果与美国中央情报局所得航线进行对比, 对南海主要航线分布特征进行分析。分析结果表明: 提取出21条南海主要航线, 一~三级航线分别有5、6、10条; 在21条南海主要航线中, 经过南沙群岛周边海域的航线多达14条; 在5条一级航线中, 分布在南海北部、西部和南部的航线分别有1、2、2条; 重要性指数由高到低的前5条航线依次为新加坡—香港、香港—台湾海峡、新加坡—巴拉巴克海峡、新加坡—巴士海峡、新加坡—高雄航线; 南海主要航线以西南—东北向为主, 新加坡、香港为南海最重要的2个交通枢纽。
更多>
2016, 16(6): 91-98.
摘要
(
4210
)
HTML
(
399
)
PDF (2510KB)
(
2773
)
引用
(
)
大气稳定度对海面人工稀氧区形成的影响
金良安
,
刘文鹏
,
高占胜
,
郑智林
摘要:
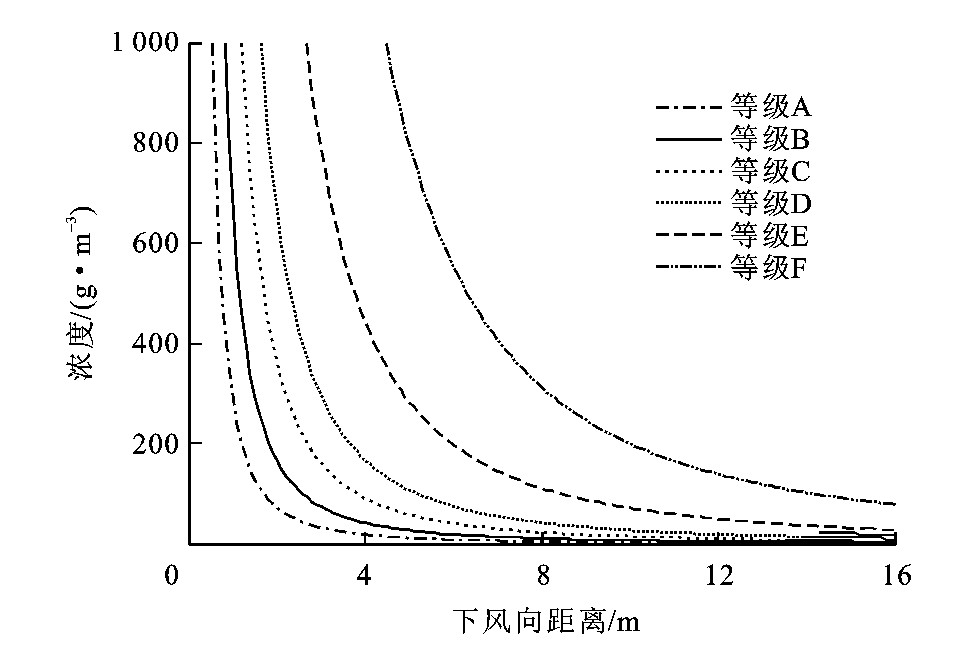
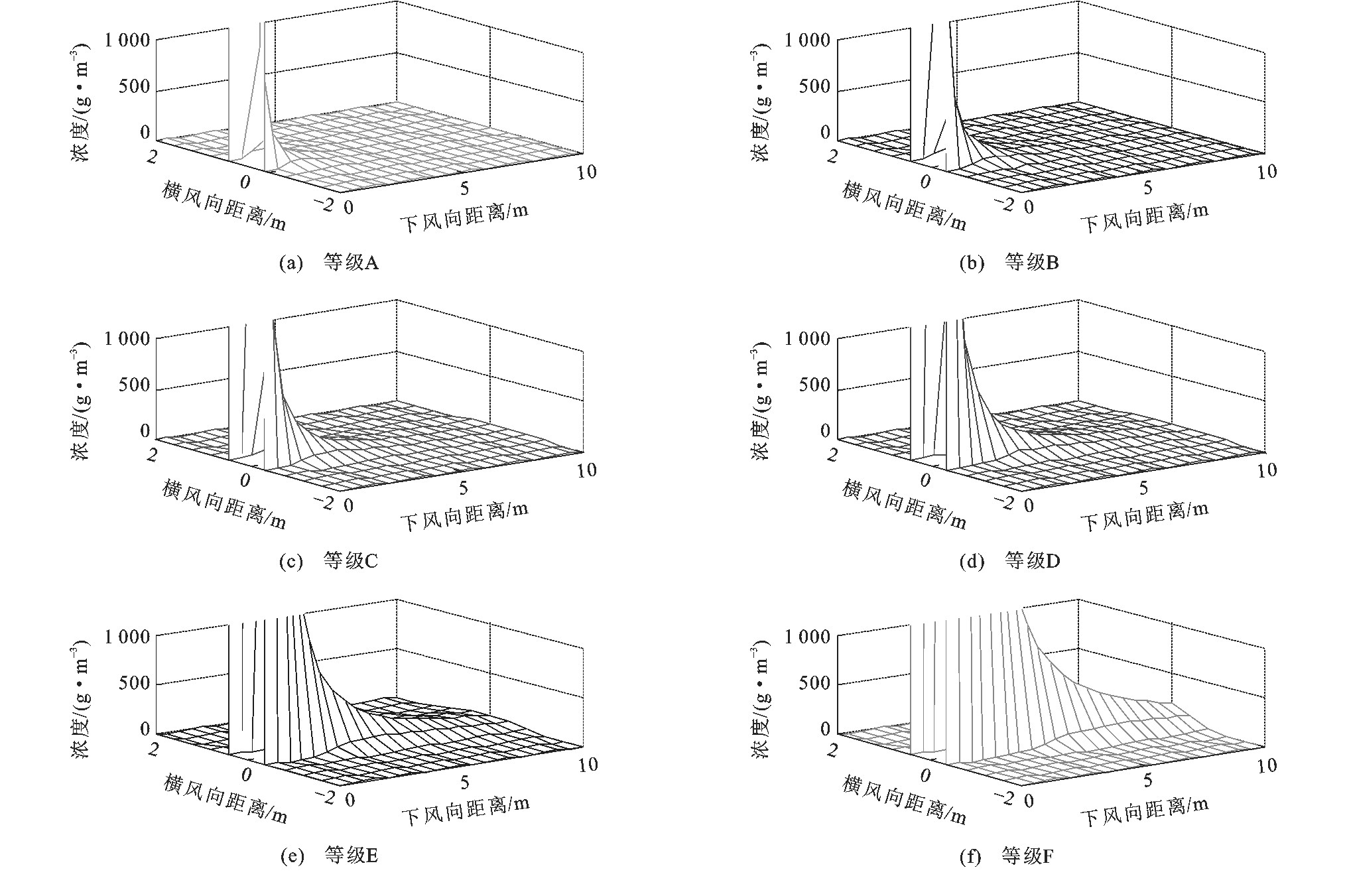
针对水中释放气体形成的特定稀氧区, 利用MATLAB和高斯烟羽模型模拟分析了6种大气稳定度等级(A~F)下不同位置的气体浓度变化情况, 绘制了相应的等浓度曲线和曲面, 给出了大气稳定度对稀氧区形成的具体影响规律。分析结果表明: 连续点源的几何高度为0, 抬升高度近似为0, 有效源高度近似为0;在同一下风向距离处与海面同一位置处, 气体浓度从低到高对应的大气稳定度等级依次为A~F; 等浓度曲线覆盖面积、等浓度曲面覆盖区域从小到大对应的大气稳定度等级依次为A~F。可见, 随着大气稳定度的提高, 气体的停留时间增加, 浓度升高, 贴近海面扩散的趋势明显, 有利于有效半径更大稀氧区的形成和维持。
更多>
2016, 16(6): 99-106.
摘要
(
3858
)
HTML
(
446
)
PDF (2124KB)
(
2375
)
引用
(
)
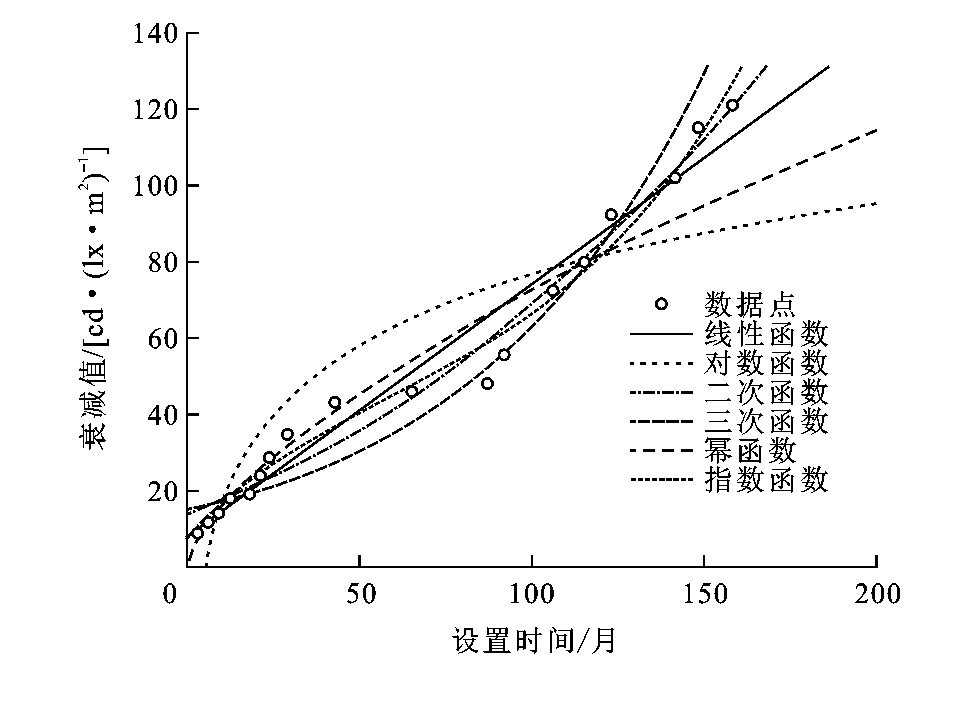
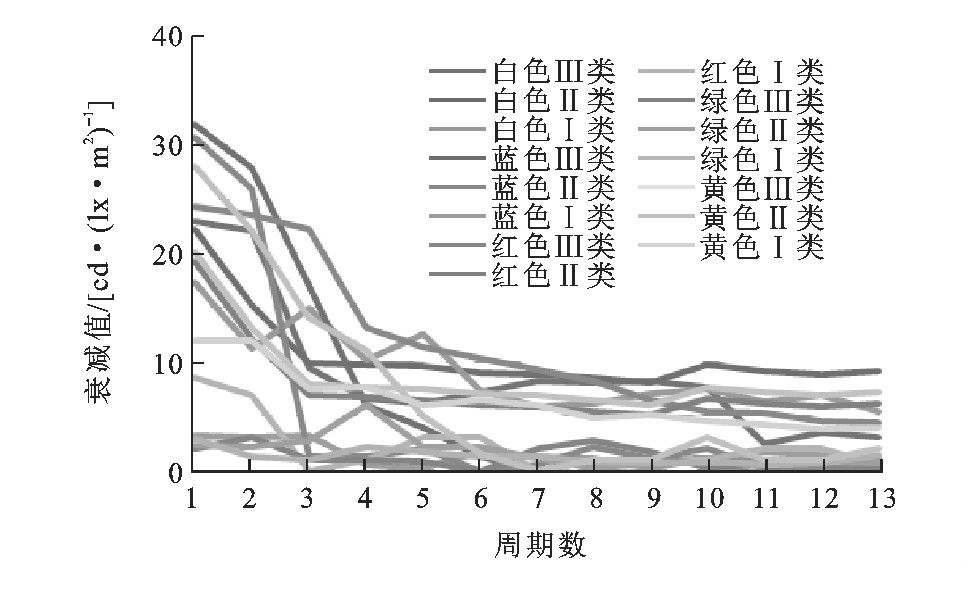
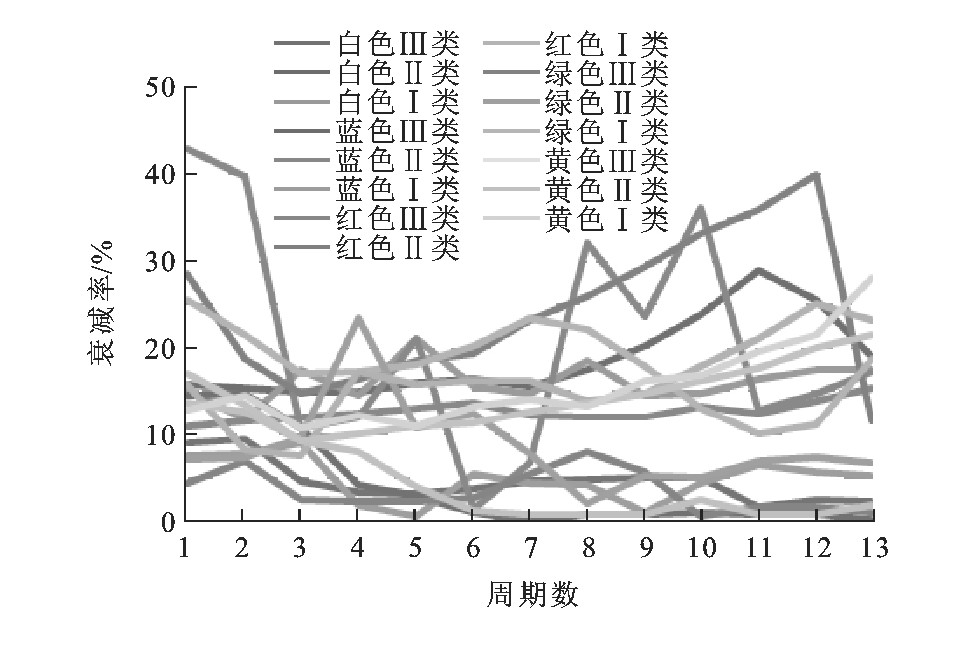
公路交通标志反光膜逆反射系数衰减规律
陈艳艳
,
姜明
摘要:
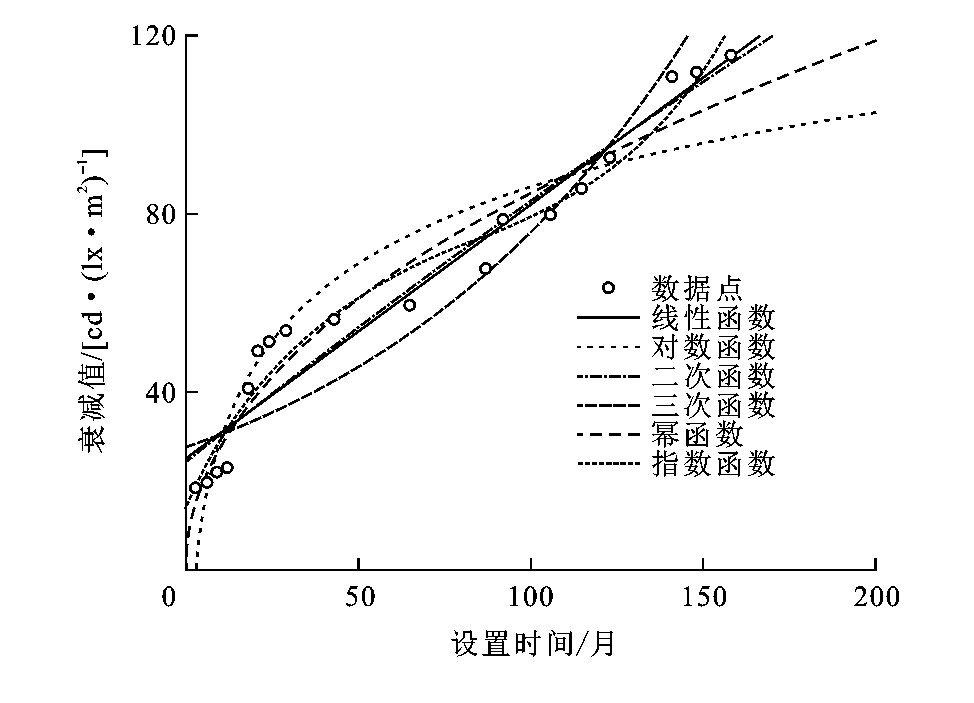
对设置在交通运输部北京试验场的230个交通标志反光膜样本进行了连续13年的逆反射系数观测, 建立了不同颜色、不同类别的交通标志反光膜逆反射系数衰减值的预测模型, 分析了逆反射系数随设置时间的衰减规律。分析结果表明: 白色Ⅰ~Ⅲ类反光膜逆反射系数衰减值的预测模型分别为三次函数、对数函数、三次函数模型, 决定系数分别为0.581、0.732、0.559;红色Ⅰ~Ⅲ类反光膜逆反射系数衰减率的变化幅度分别为16.0%、28.0%、42.0%, 其他颜色反光膜逆反射系数衰减率的变化幅度小于21%。可见, 逆反射系数衰减值的二次函数、三次函数模型具有更好的拟合性, 不同颜色、不同类别反光膜的逆反射系数衰减规律存在显著差异, 但衰减均随着设置时间的延长而逐渐减缓。
更多>
2016, 16(6): 107-113.
摘要
(
4347
)
HTML
(
558
)
PDF (1086KB)
(
2612
)
引用
(
)
临时养护区CMEM模型的微观仿真参数标定
高天智
,
陈宽民
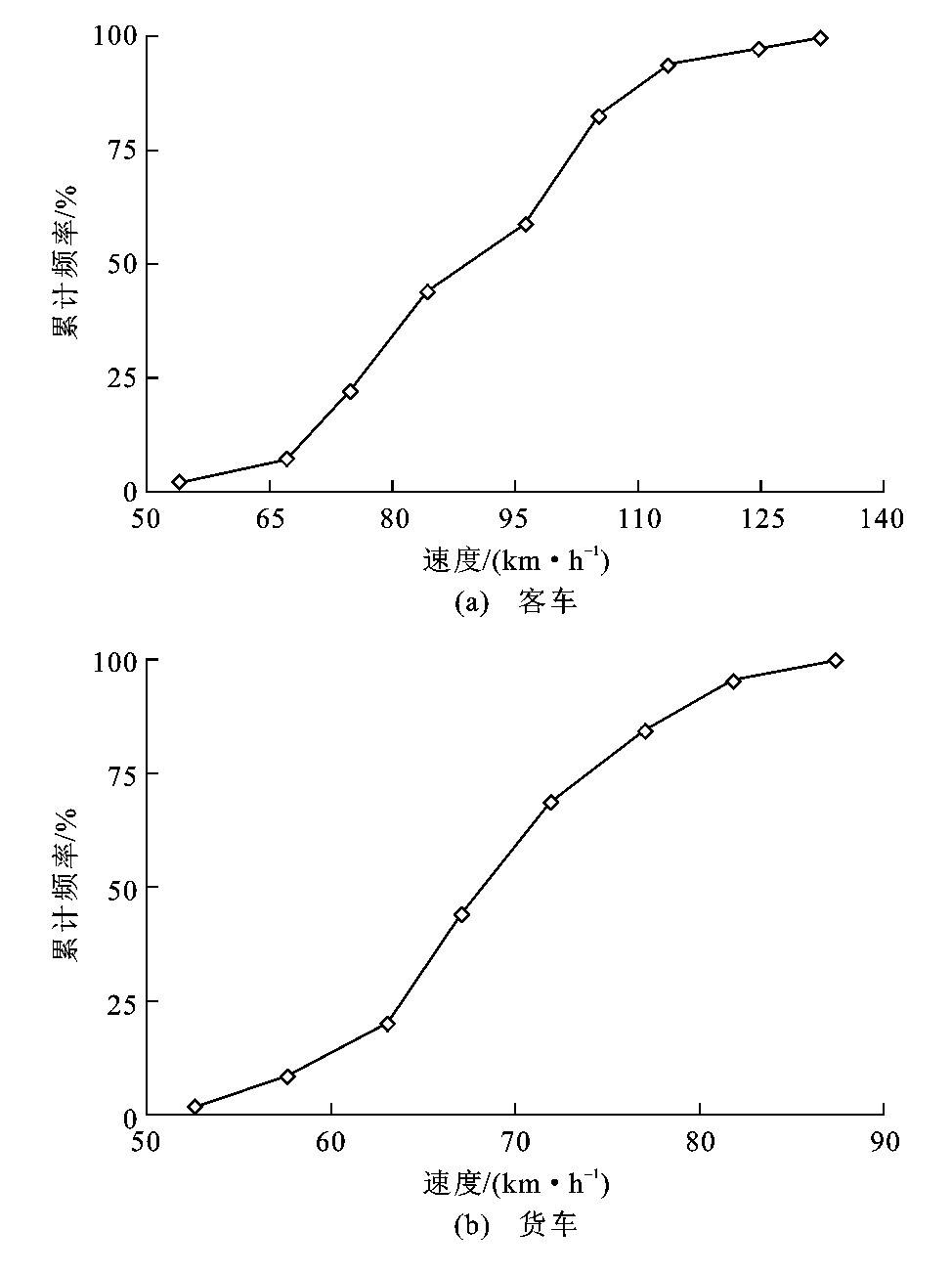
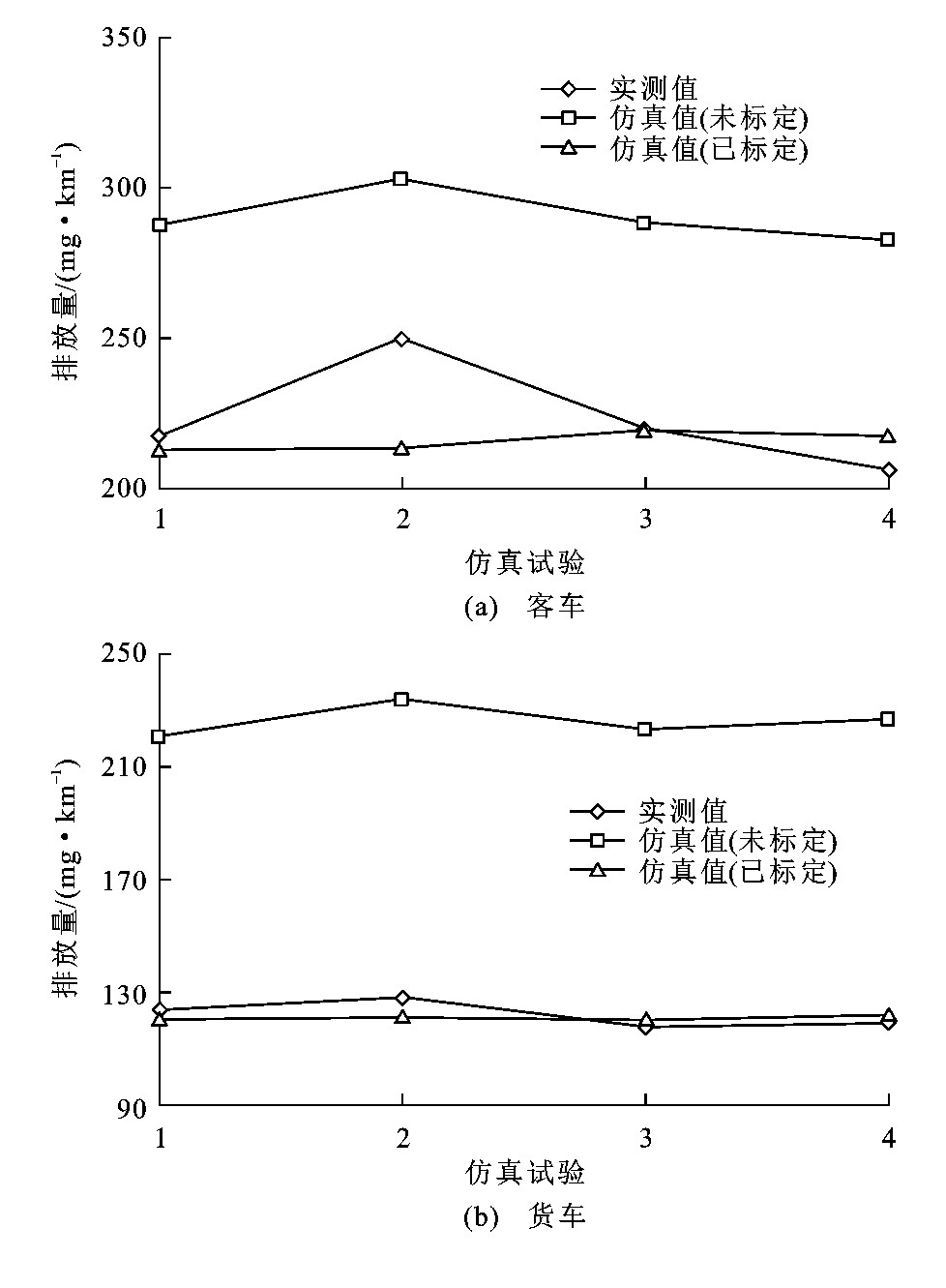
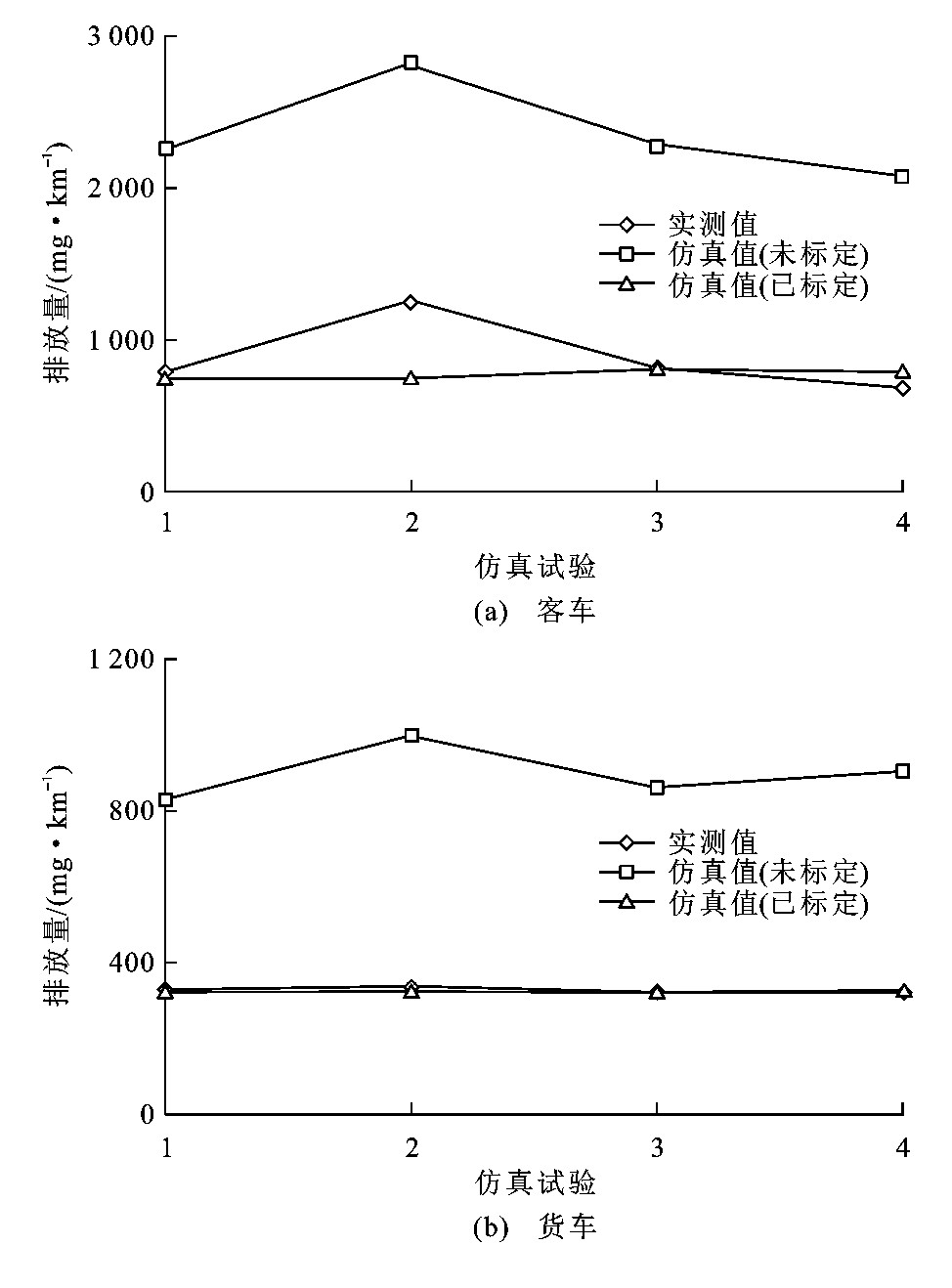
摘要:
为了保证汽车尾气排放计算的准确性, 对临时养护区微观仿真模型进行参数标定。以河南许尉高速公路某临时养护区为例, 通过现场调查获取交通数据, 建立VISSIM交通仿真模型。根据实测数据对交通量与交通组成等宏观参数进行标定, 对期望速度、期望加速度采用特征点数值进行微观参数标定。利用正交试验法标定车头时距、跟车变量、进入跟车状态的阈值和振动加速度4种跟车模型参数。根据有效的仿真结果确定了期望速度与行驶速度之间的数值关系。利用有效的仿真数据结合CMEM模型进行临时养护区汽车尾气排放量计算, 得到了基于路段平均速度的尾气排放计算公式。分析结果表明: 宏观参数标定后的仿真速度与实测速度存在明显差异, 客车与货车速度的平均相对误差分别为11.36%与35.12%;结合微观参数标定后, 仿真速度与实测速度的平均相对误差均控制在3%以内, 客车与货车的期望速度分别为行驶速度的1.270、1.165倍; 仿真模型标定后的尾气排放量与实测值的相对误差均小于7%, 模型标定效果显著。
更多>
2016, 16(6): 114-124.
摘要
(
3891
)
HTML
(
281
)
PDF (1310KB)
(
2454
)
引用
(
)
基于离散时间的定价与舱位控制联合决策
高金敏
,
乐美龙
,
曲林迟
摘要:
为使航空公司收益最大化, 将旅客订票与退票看作2个独立的随机过程, 利用泊松分布模拟整个预售期内旅客订票过程, 运用负指数分布模拟旅客退票过程, 从运用价格控制需求的角度出发建立了基于离散时间的航空机票定价与舱位控制联合决策模型, 采用动态规划的求解思想和方法对模型进行了求解, 确定在合适的时间段以何种价格销售机票, 设置每个时间段机票销售的数量限制, 通过一个算例对模型进行了验证。分析结果表明: 2~9折与全价机票应分别提前60.00、56.58、52.87、48.83、44.38、39.44、33.88、27.51、20.09d开始销售, 订票限制应分别为3、43、79、111、141、171、199、227、290。联合决策模型具有有效性和实用性, 可作为航空公司进行合理定价和舱位控制的参考。
更多>
2016, 16(6): 125-131.
摘要
(
3812
)
HTML
(
368
)
PDF (419KB)
(
2526
)
引用
(
)
交通信息工程及控制
基于CS-SD的车载环境下实时行人检测模型
郭爱英
,
徐美华
,
冉峰
,
王琪
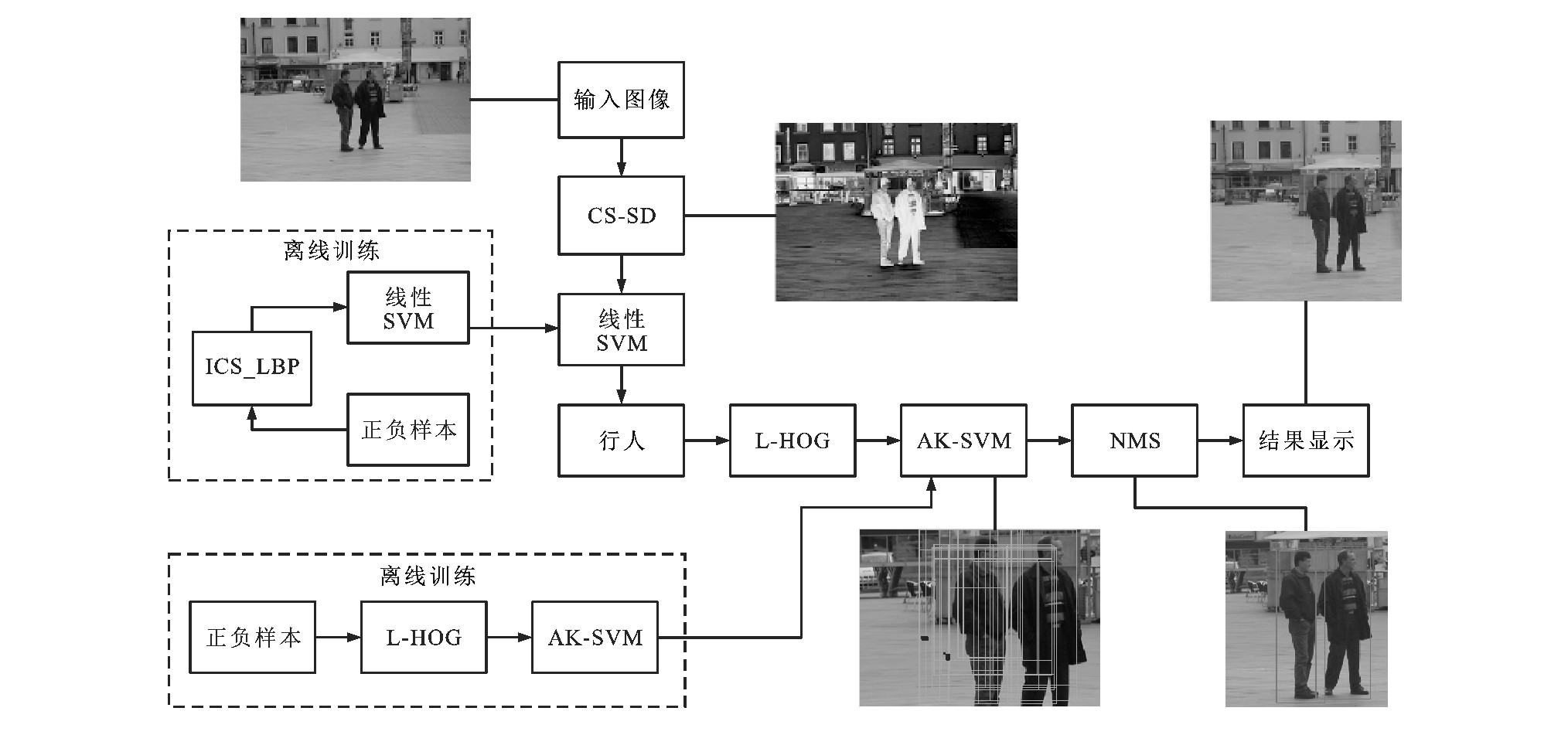
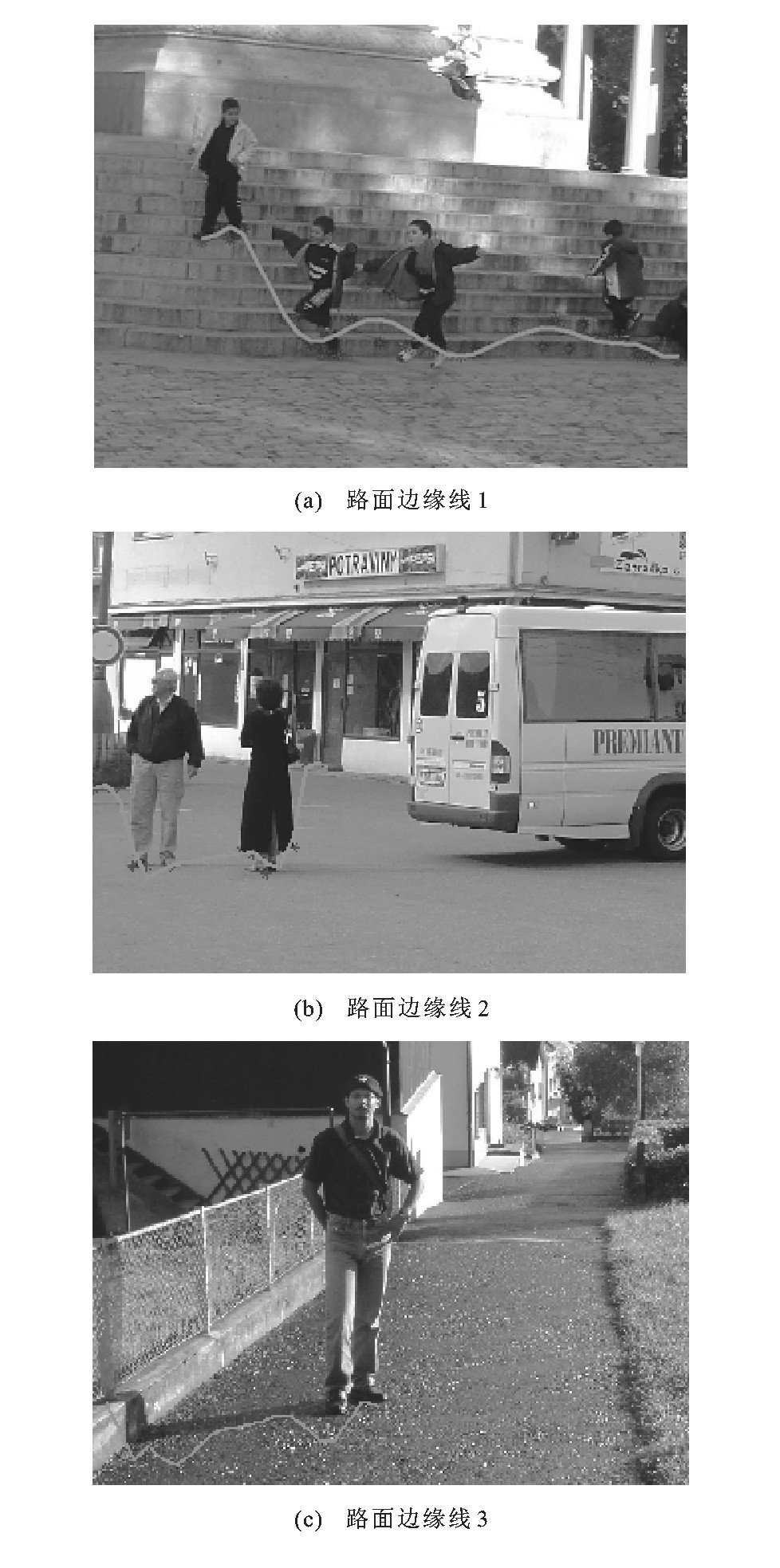
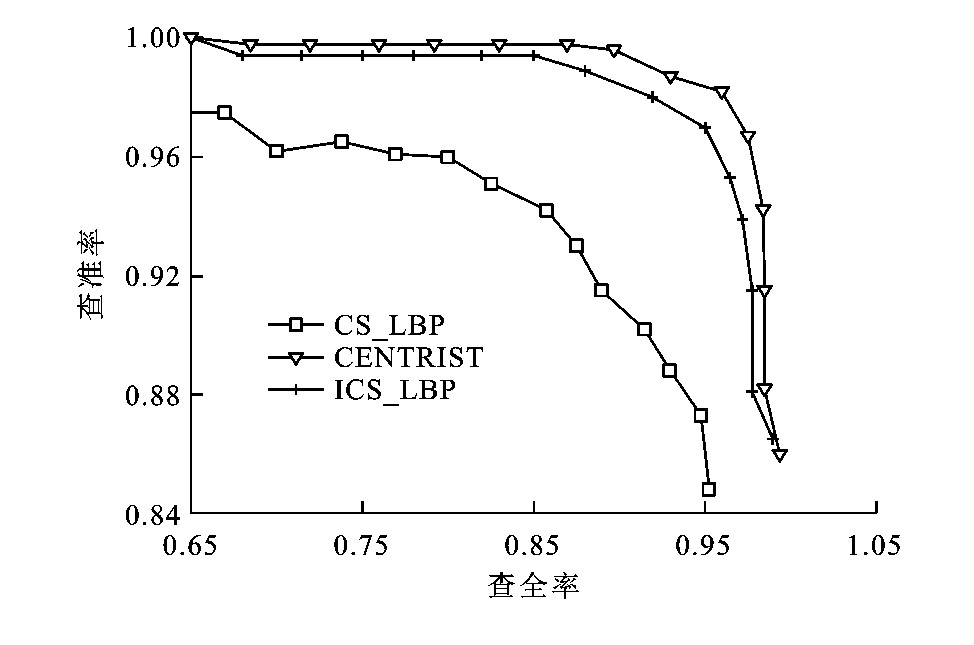
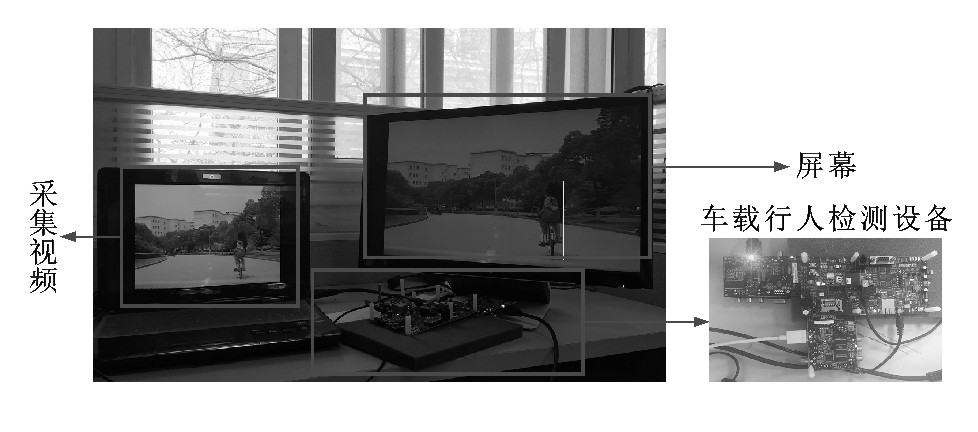
摘要:
针对车辆辅助驾驶系统中行人检测的实时性问题, 提出一种基于路面边缘线标定结合显著性纹理检测(CS-SD) 的算法和定位方向梯度直方图(L-HOG) 的行人检测模型, 应用CS-SD算法替代穷尽搜索快速标定图像中的行人区域, 应用L-HOG快速提取行人特征, 并采用附加核心的支持向量机(AK-SVM) 进行高效目标分类。分析结果表明: 在个人计算机上对包含832个行人的500幅图像进行检测时, 模型正确检测720个行人, 检测率为86.5%, 误检率为4.1%, 检测时间为39ms; 在基于BF609的车载行人检测系统上对包含988个行人的48 400幅图像进行检测时, 模型正确检测861个行人, 漏检127个行人, 误检13个行人, 检测速度为20fps。可见, 提出的行人检测模型在不降低检测率的前提下, 可以达到满意的检测速度, 并且可以用于实时行人检测车载设备。
更多>
2016, 16(6): 132-139.
摘要
(
3710
)
HTML
(
340
)
PDF (3421KB)
(
2842
)
引用
(
)
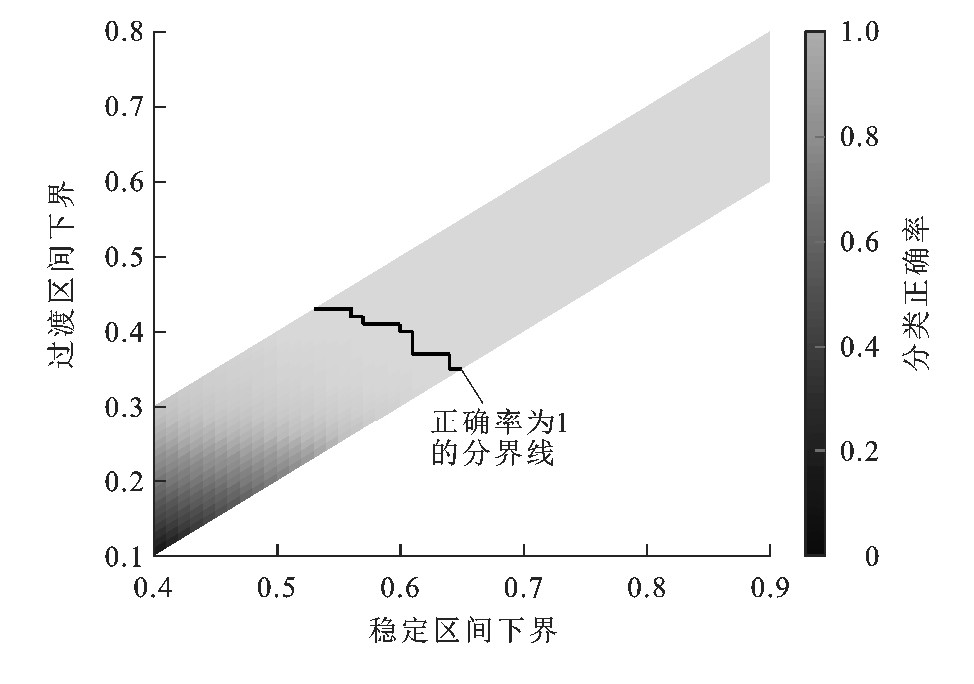
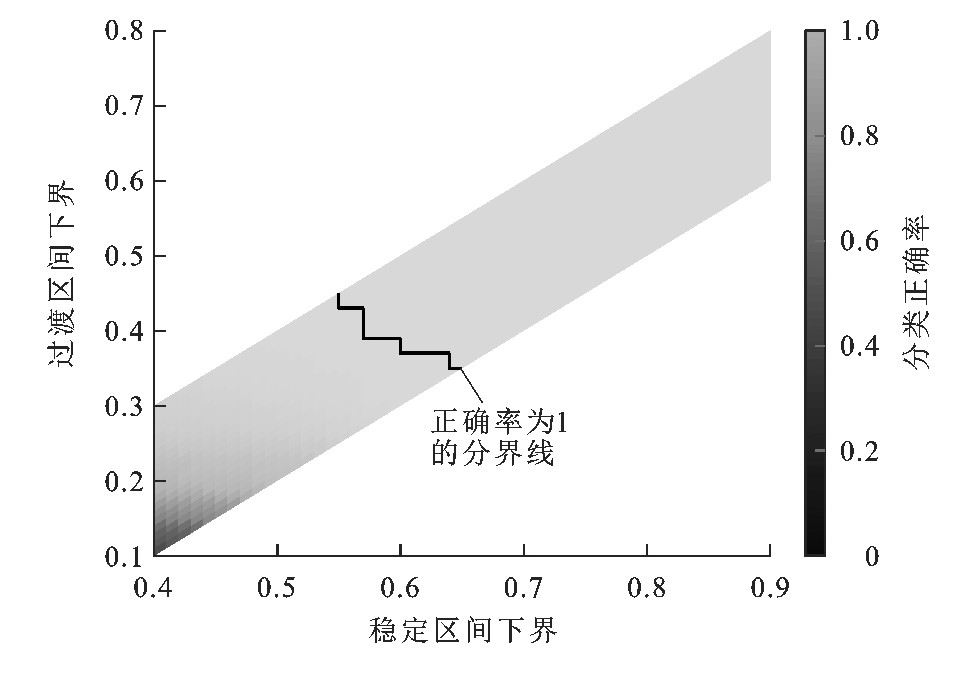
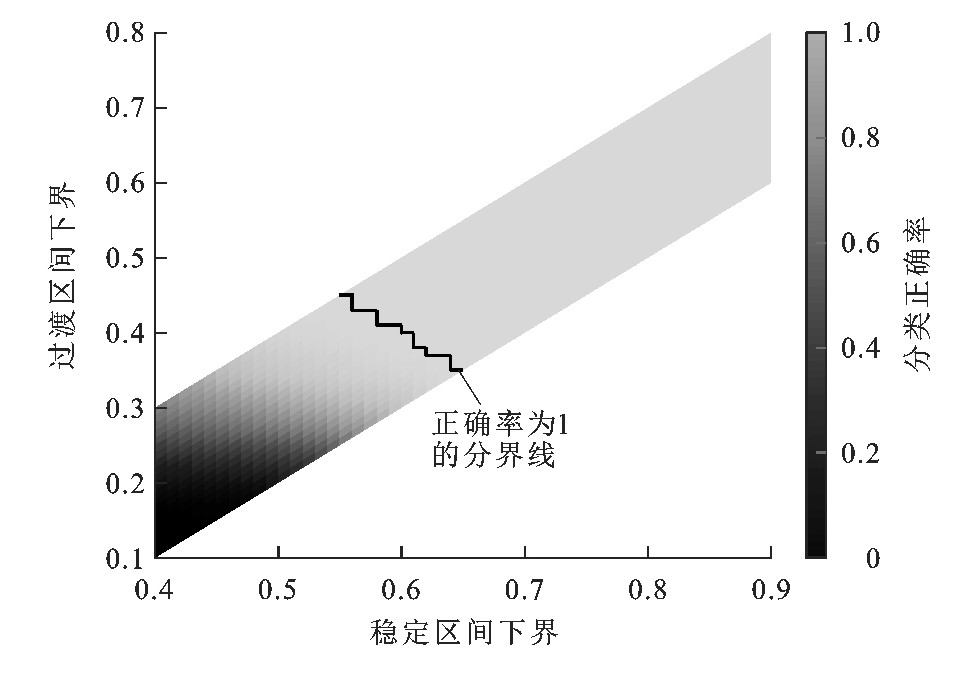
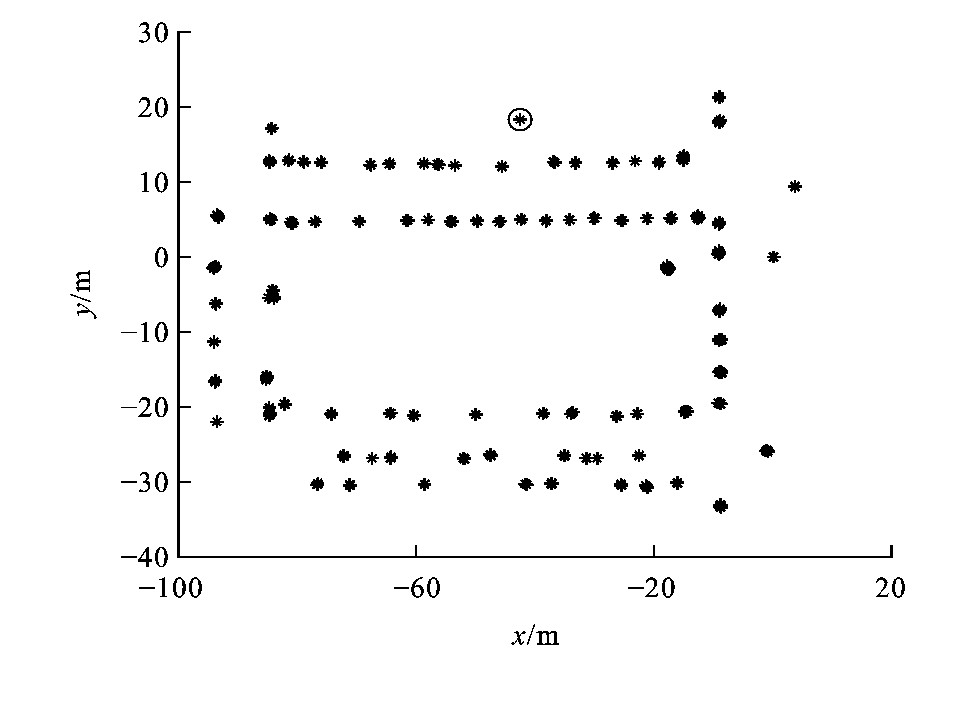
无人车行驶环境特征分类方法
康俊民
,
赵祥模
,
徐志刚
摘要:
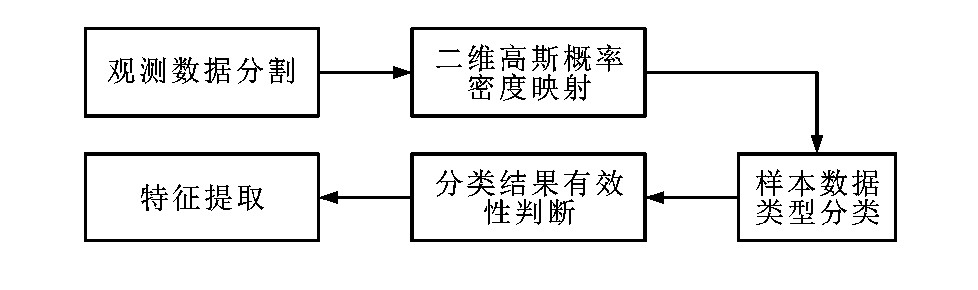
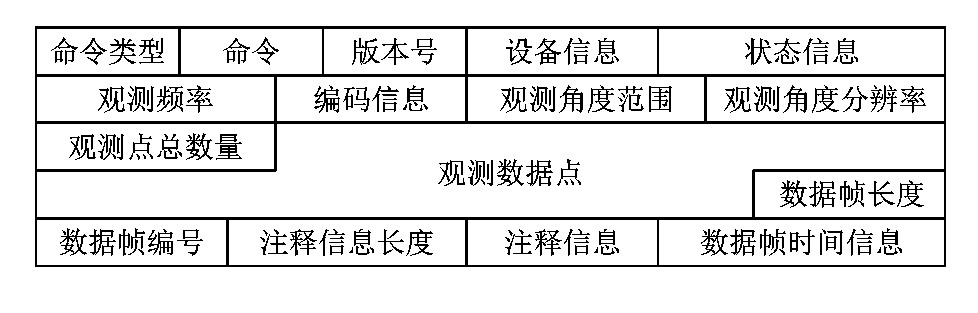
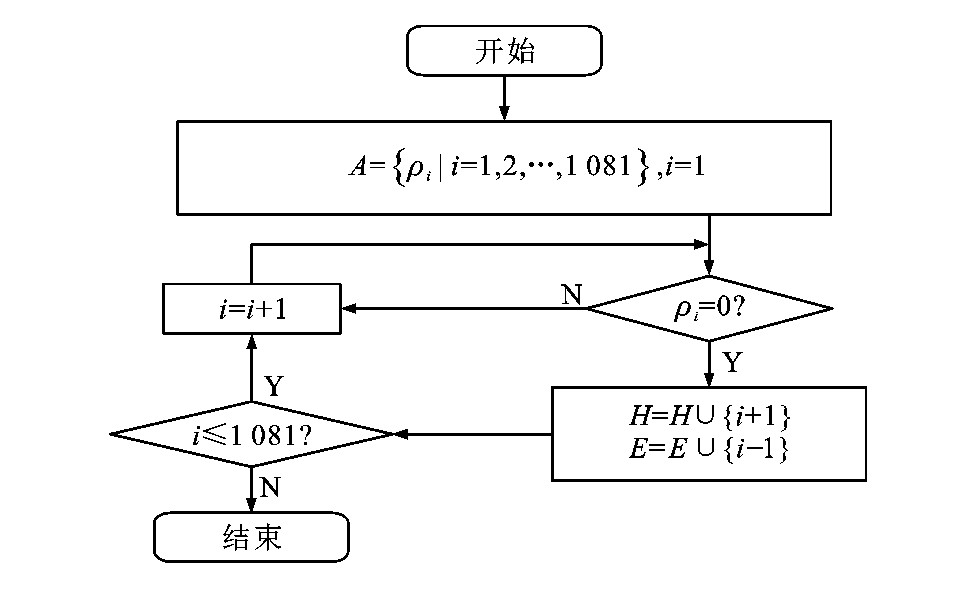
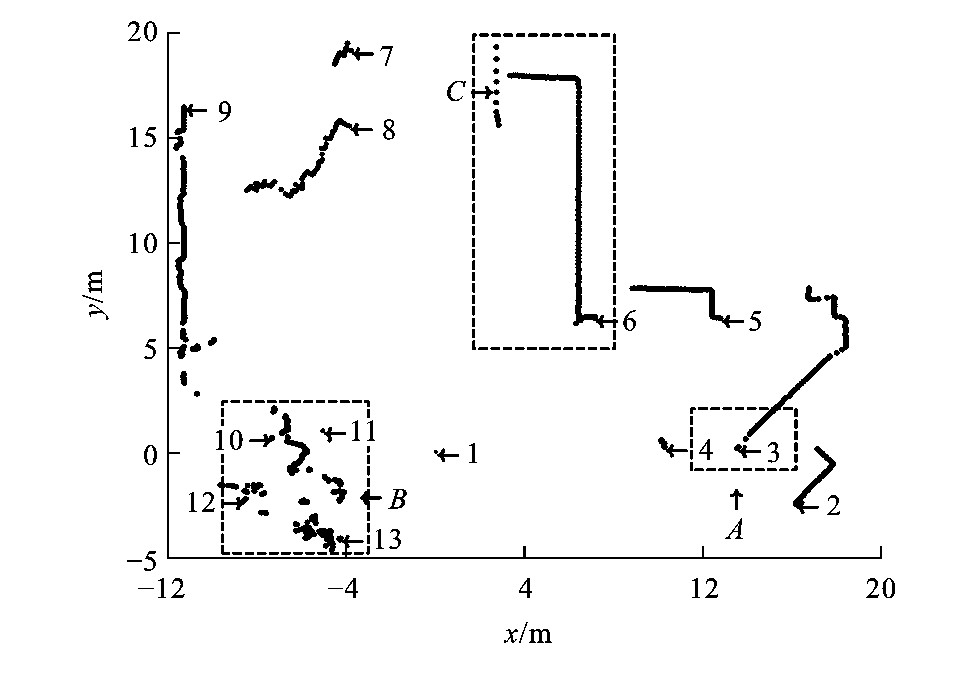
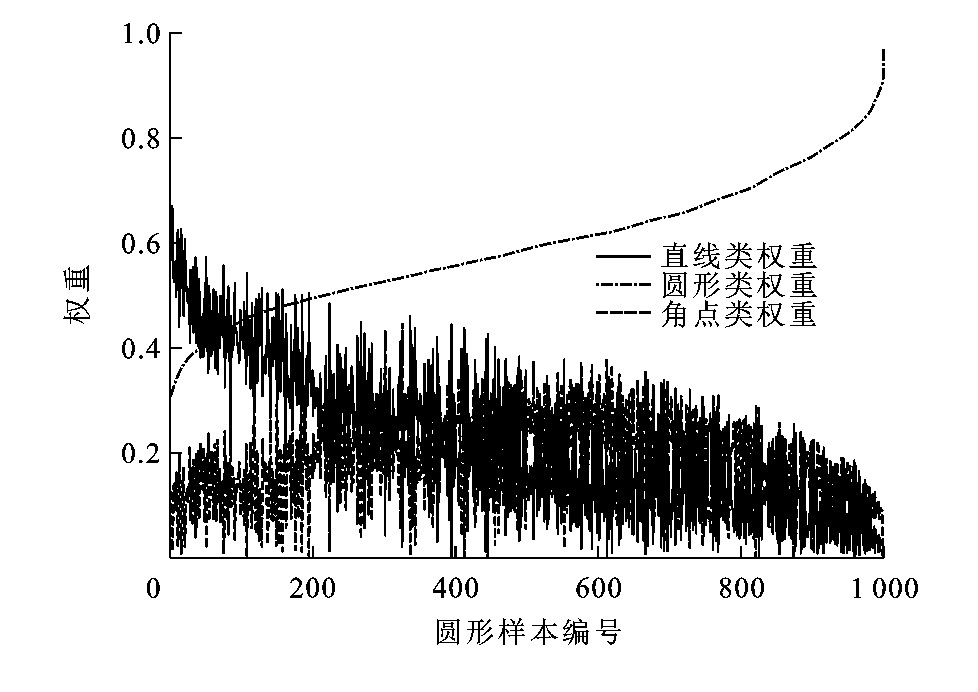
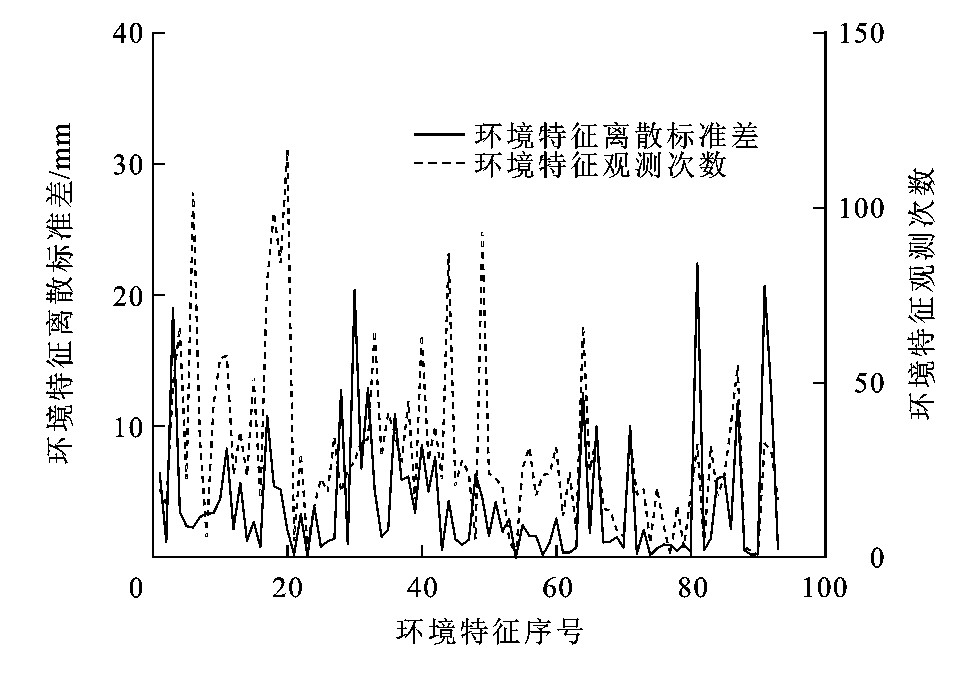
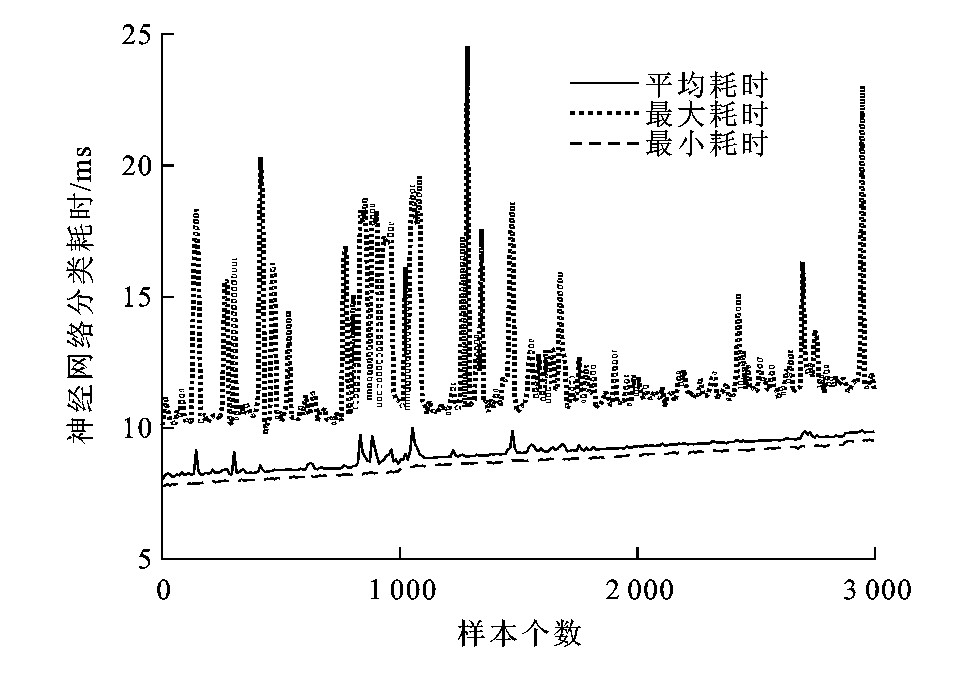
为了提高车载2D激光雷达对城市环境障碍物的分类能力与环境地图创建精度和无人车自主行为决策的安全性与准确性, 提出了一种基于机器学习的环境特征分类方法。将2D激光雷达的观测数据帧分割为独立的数据段, 每个数据段中包含一个环境障碍实体; 在数据段的二维高斯概率密度空间中, 以概率密度的等高线椭圆轴长、对数似然值和最大概率密度作为人工神经网络的样本数据元素, 利用人工神经网络完成数据段分类; 利用人工神经网络输出值的权重对分类的有效性进行判定, 仅保留有效的环境特征, 并对分类完成的观测数据进行特征提取。计算结果表明: 在同一个试验场景中, 当分类有效性判定条件被设定为分类稳定区间为[0.55, 1], 分类过渡区间为[0.45, 0.55), 分类无效区间为[0, 0.45)的宽松条件时, 共识别出98个环境特征, 同一环境特征的多次观测数据的分类提取结果之间的最大标准差为30.7 mm, 多个环境特征的平均标准差为5.1mm; 当分类有效性判定条件设定为分类稳定区间为[0.65, 1], 分类过渡区间为[0.35, 0.65), 分类无效区间为[0, 0.35)的严格条件时, 共识别出93个环境特征, 同一环境特征的多次观测数据的分类提取结果之间的最大标准差为22.0mm, 多个环境特征的平均标准差为4.2mm, 因此, 提出的分类方法的噪声容忍能力强, 分类精度高。
更多>
2016, 16(6): 140-148.
摘要
(
5479
)
HTML
(
332
)
PDF (972KB)
(
2628
)
引用
(
)
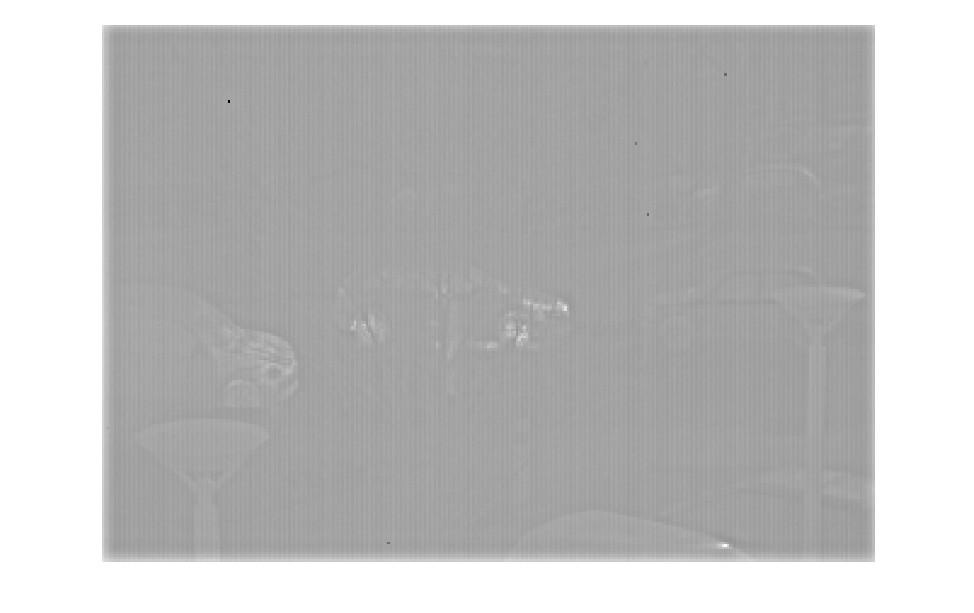
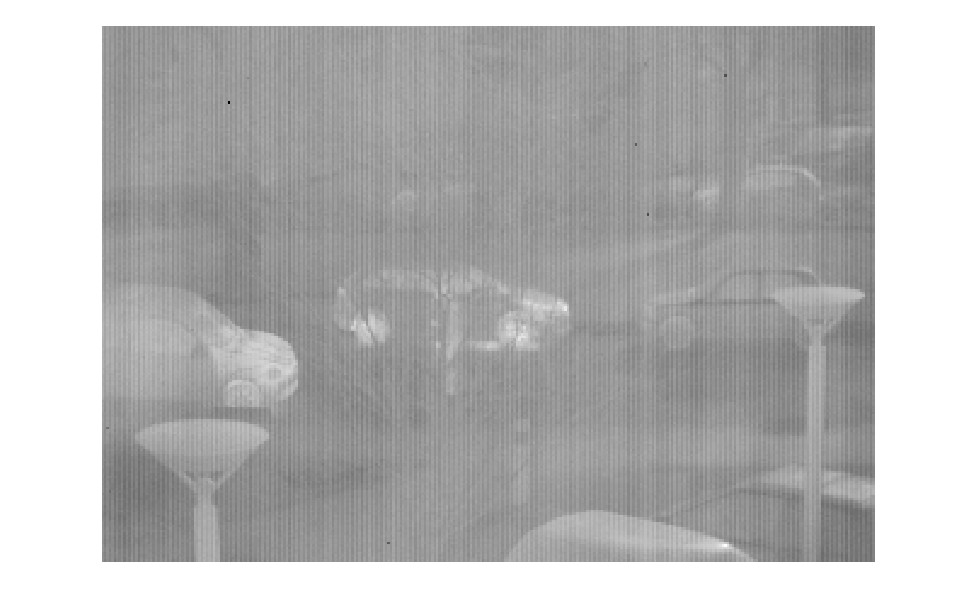
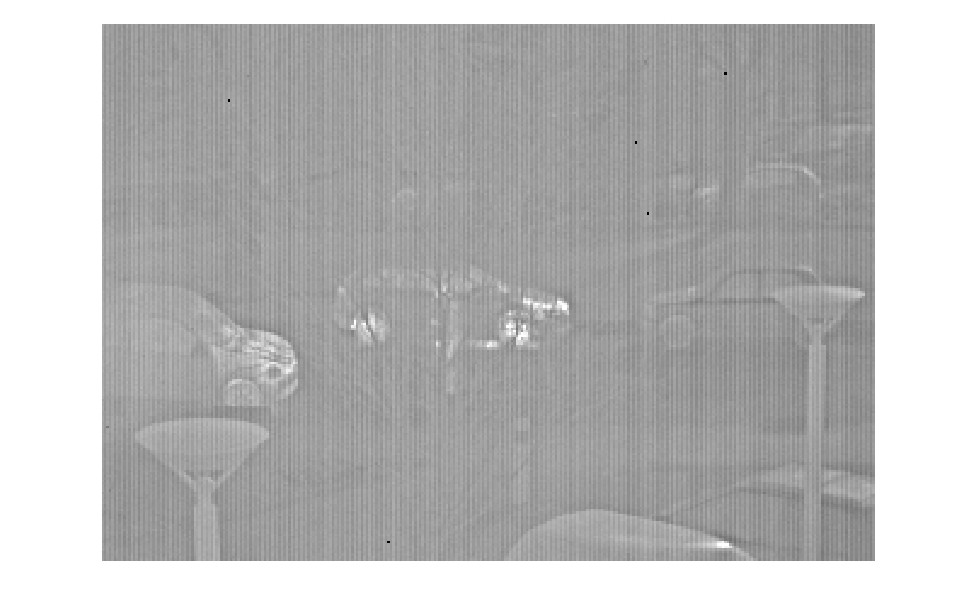
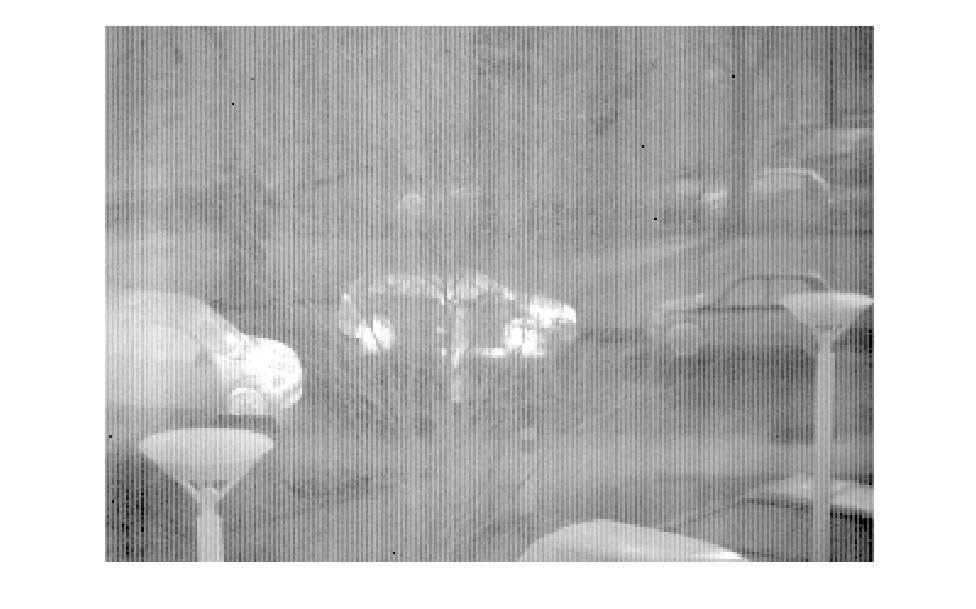
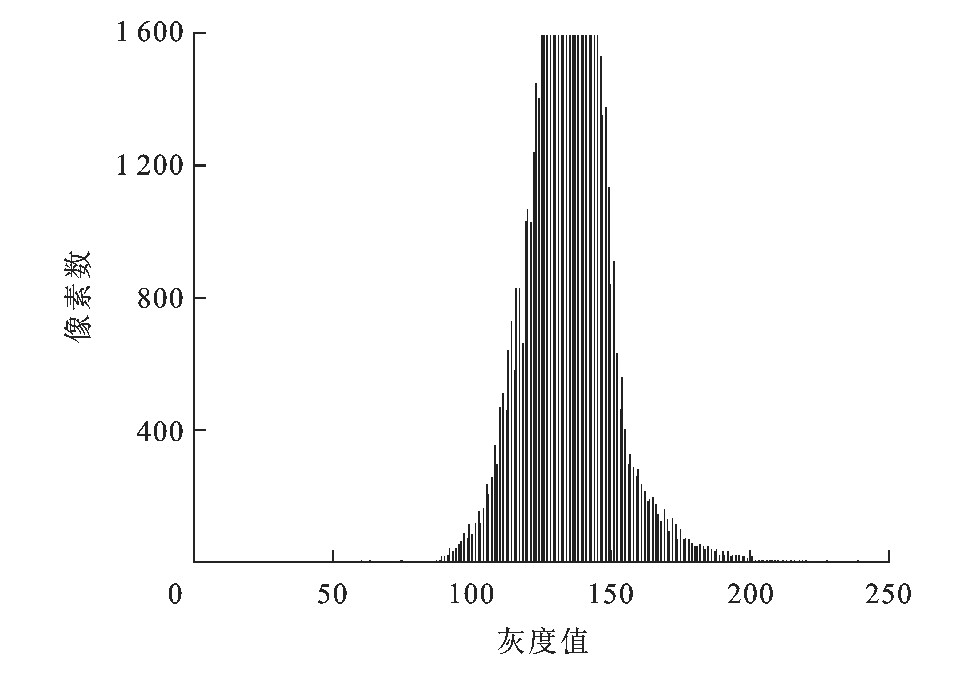
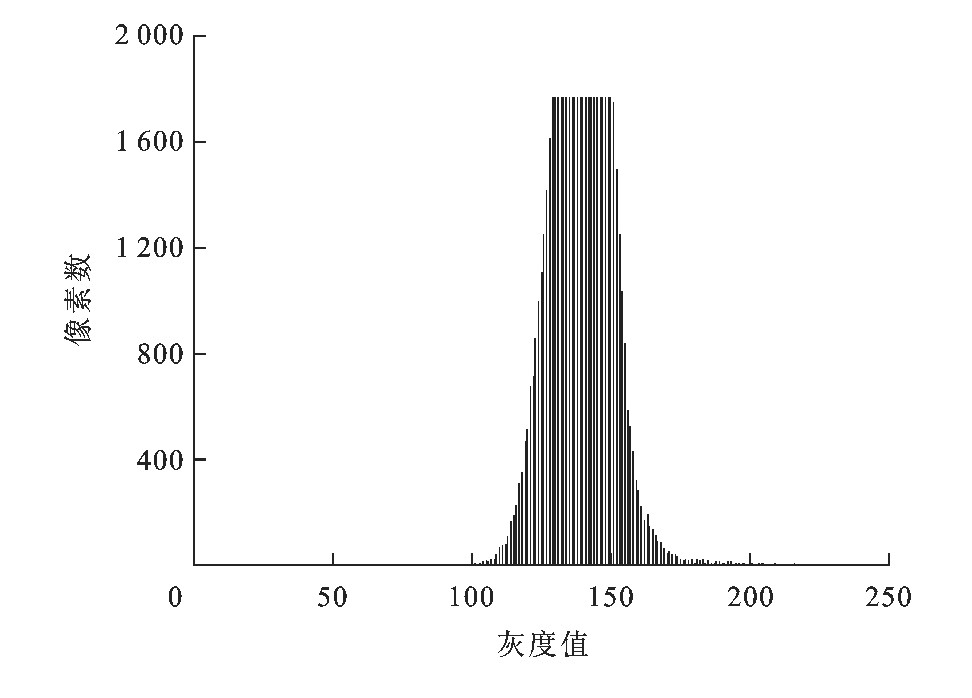
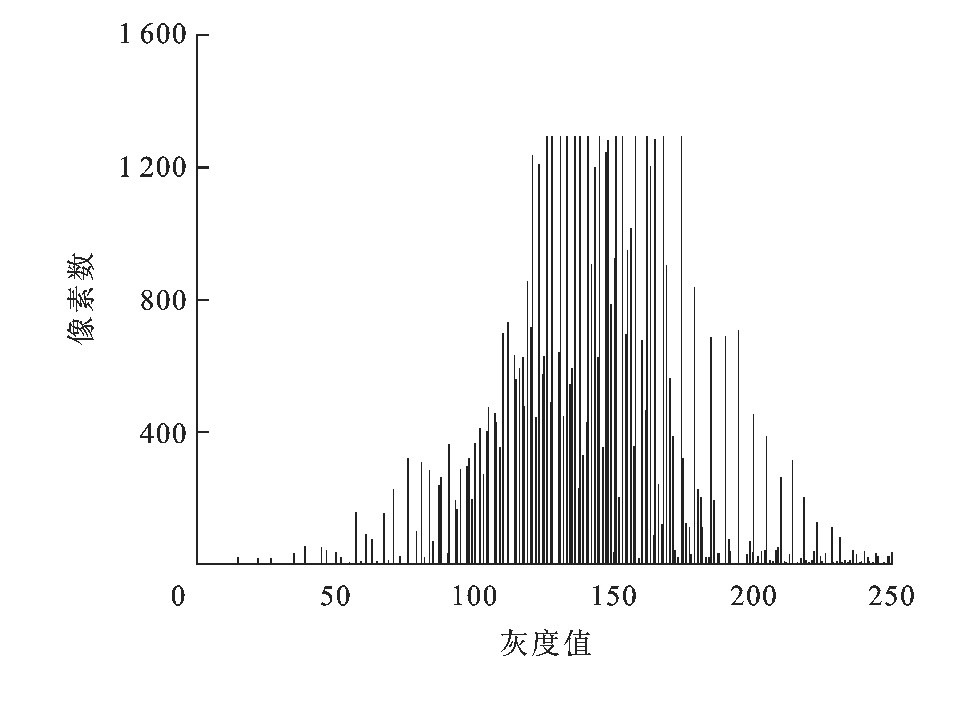
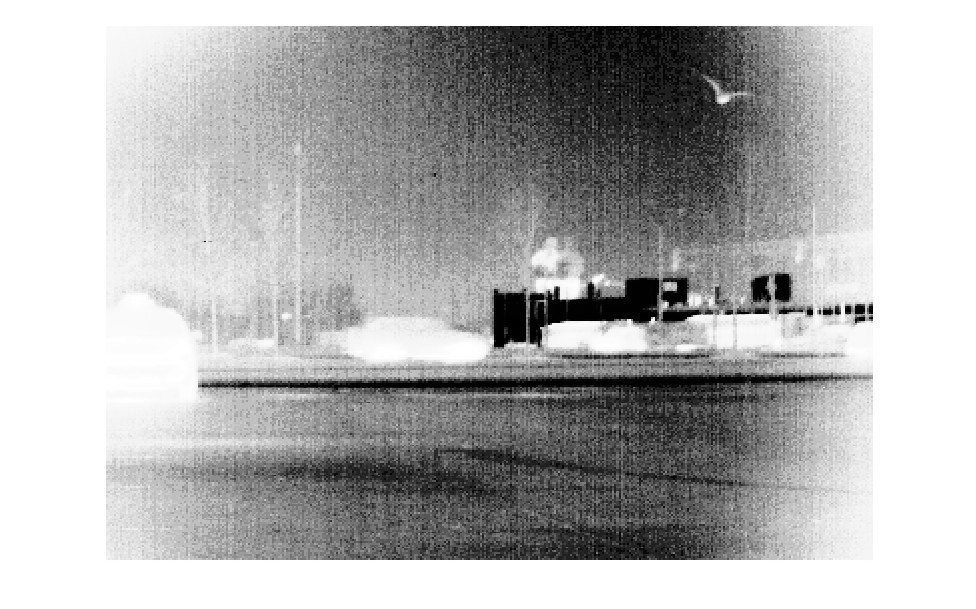
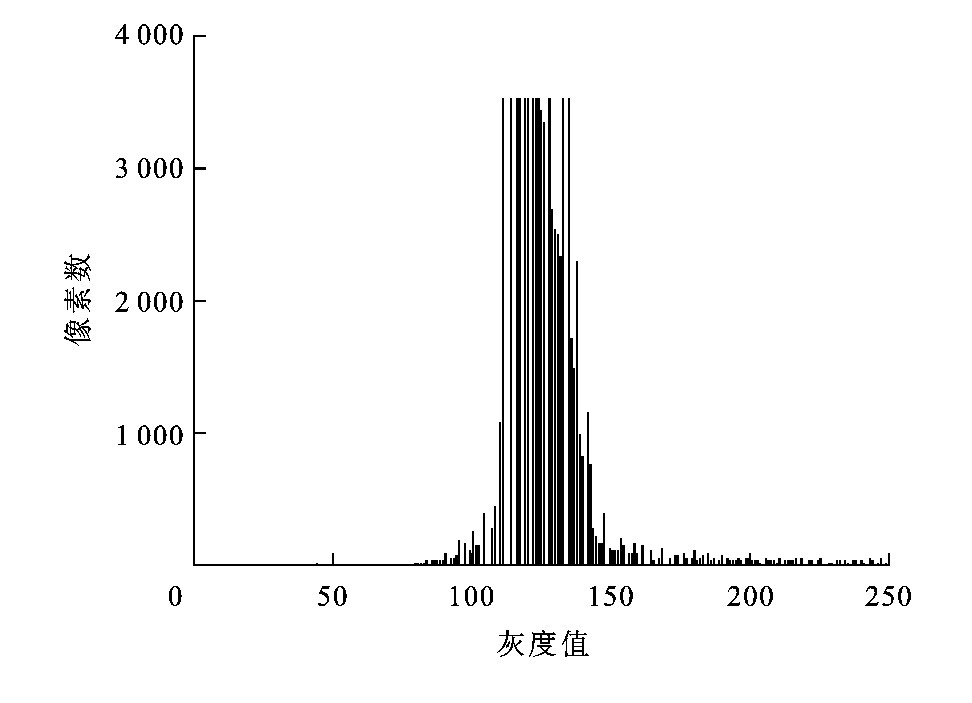
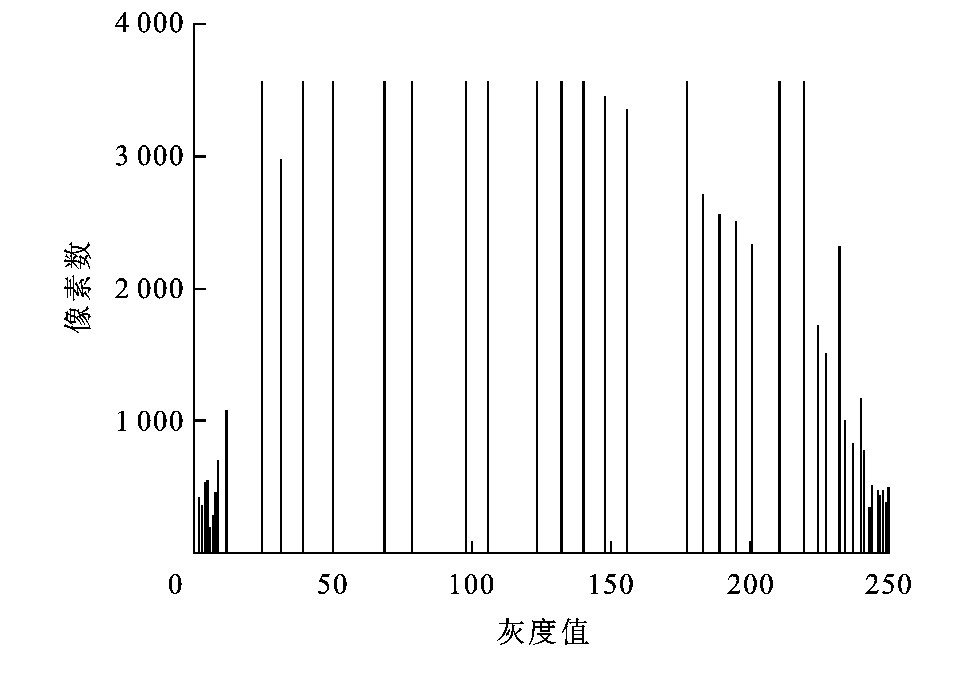
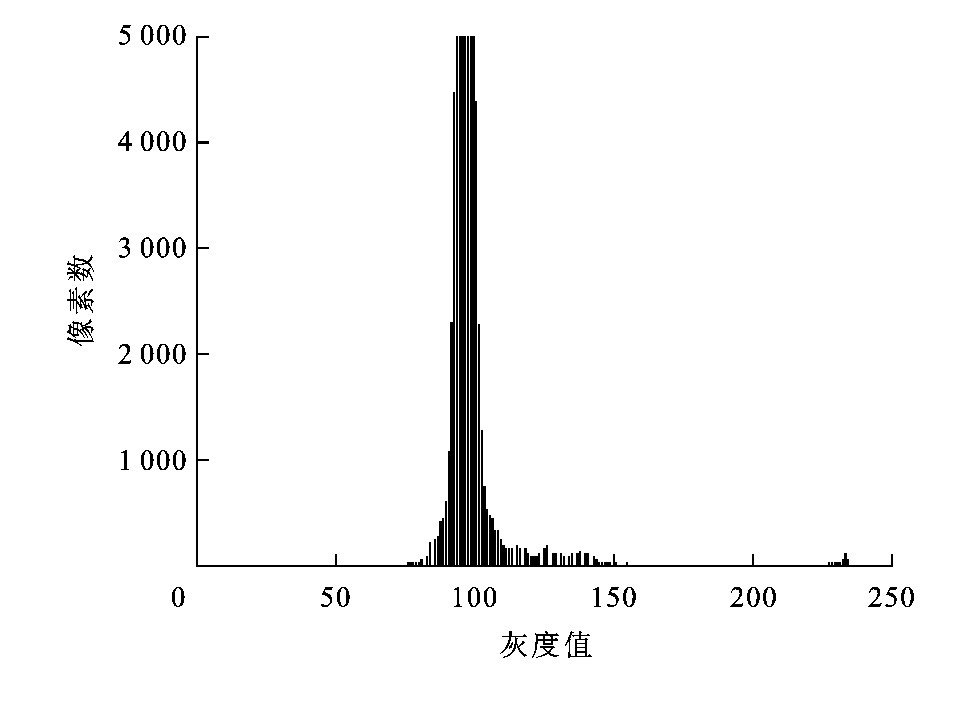
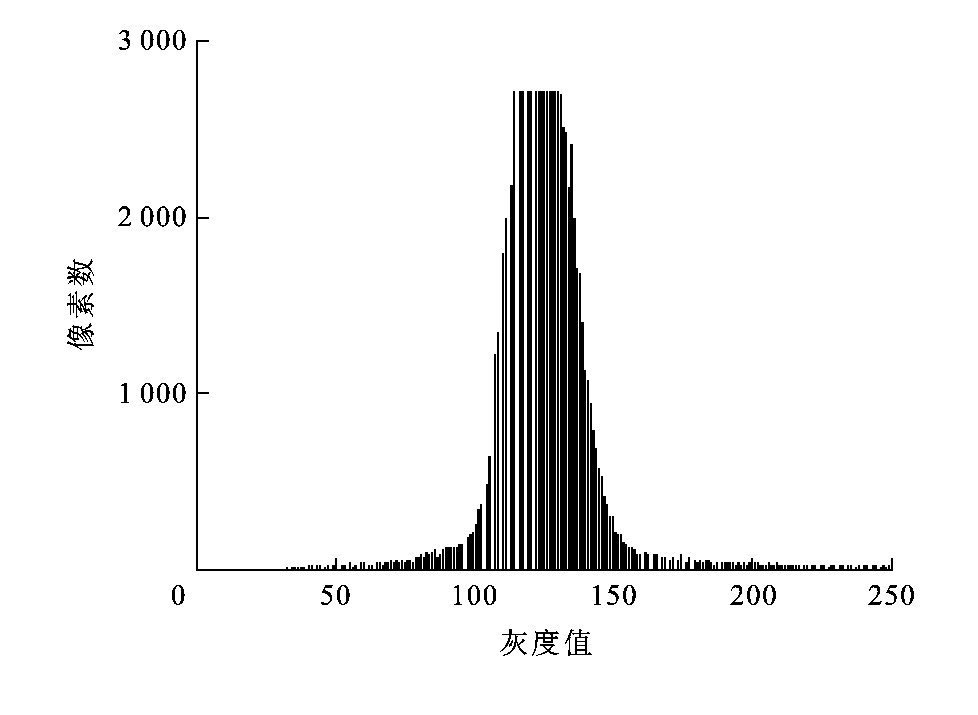
结合暗原色优先和Gamma校正的红外交通图像增强算法
顾明
,
郑林涛
,
刘中华
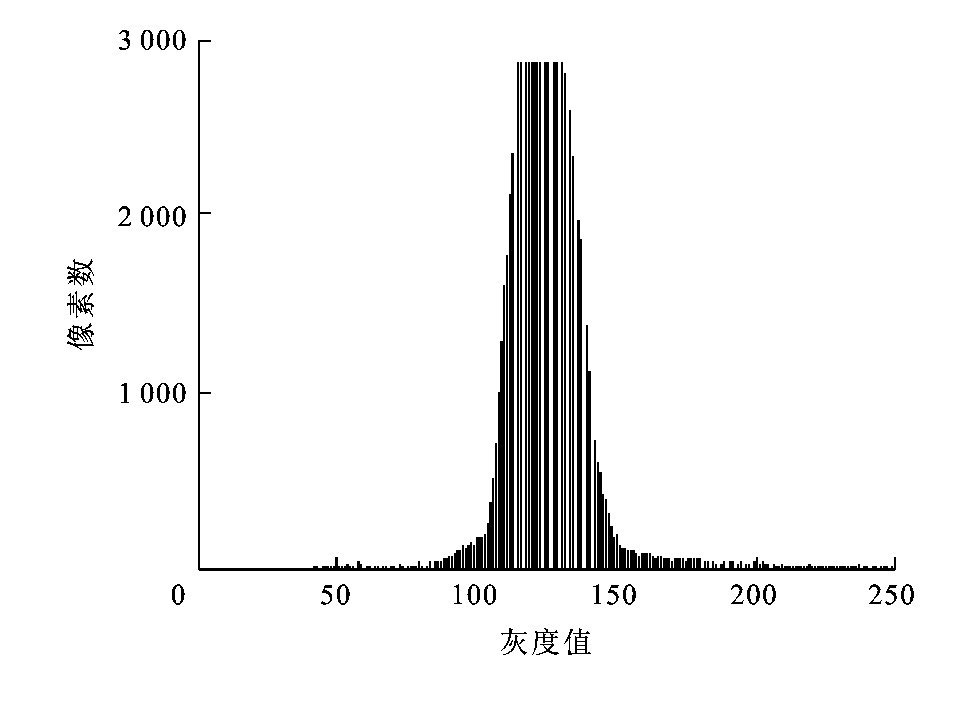
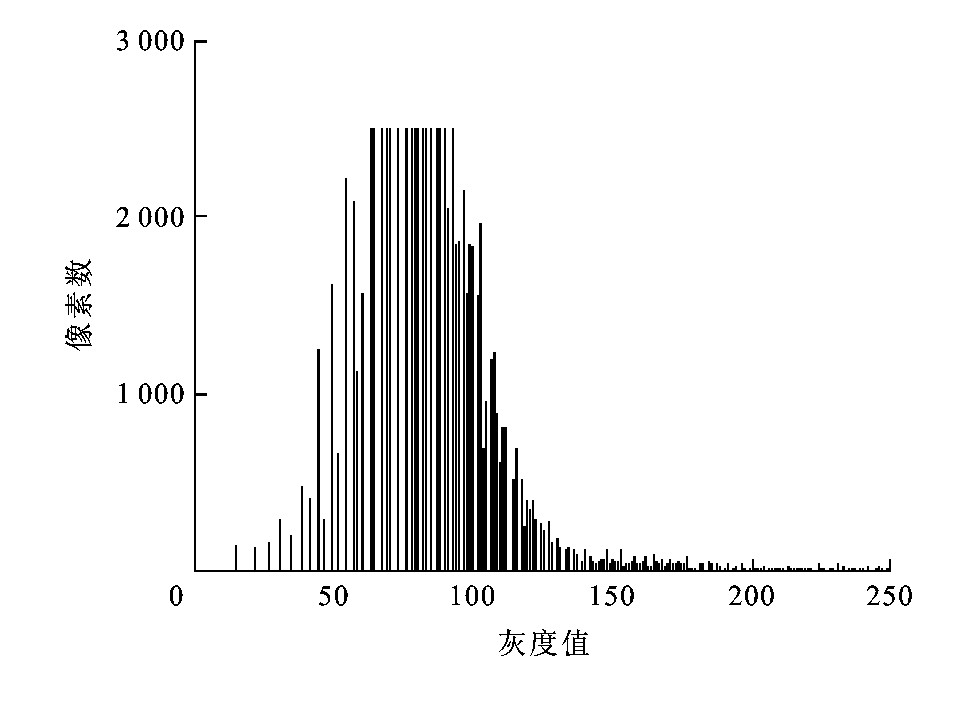
摘要:
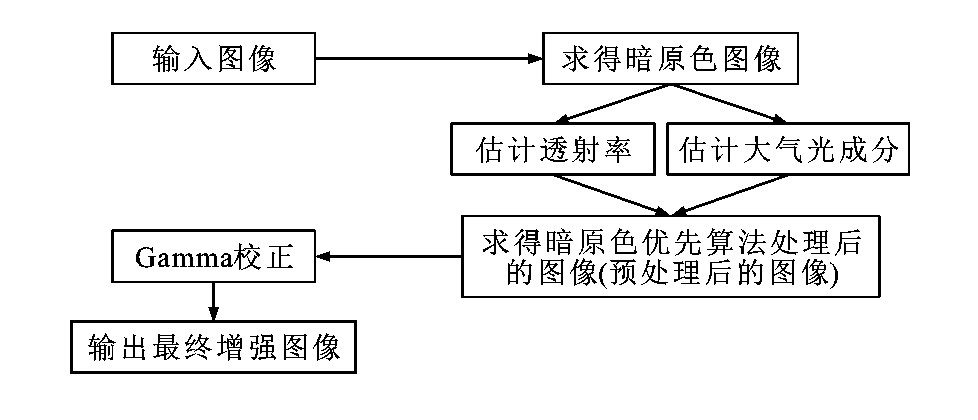
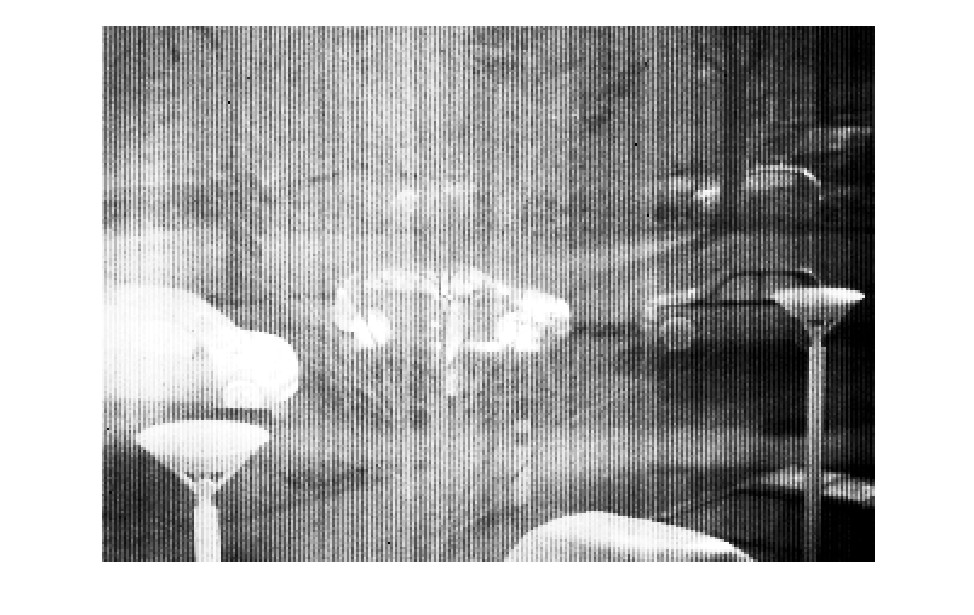
为了有效提高智能交通监控设备采集到的红外交通图像的视觉质量, 将可见光图像去雾的方法引入红外交通图像的增强处理过程中, 提出一种结合暗原色优先和Gamma校正的红外交通图像增强新算法, 首先采用暗原色优先算法对原始降质红外交通图像进行处理而得到初步增强的图像, 然后使用Gamma校正算法对初步增强的图像亮度进行调节, 并将新算法与其他常见的红外图像增强算法进行图像增强效果的对比分析。试验结果表明: 两幅原始红外交通图像的信息熵分别为4.71、5.07, 经过新算法处理后信息熵分别增加到6.45、5.92;两幅原始红外交通图像的灰度标准差分别为6.90、19.14, 经过新算法处理后灰度标准差分别增加到31.17、32.35;新算法的信息熵计算值大于他他算法的计算值。可见, 新算法的增强效果优于其他常见的红外图像增强算法, 它能显著改善红外交通图像的视觉效果, 为图像的后续处理与分析奠定良好的基础。
更多>
2016, 16(6): 149-158.
摘要
(
4098
)
HTML
(
516
)
PDF (3683KB)
(
2494
)
引用
(
)
《交通运输工程学报》2016年(第16卷)总目次
2016, 16(6): 159-159.
摘要
(
2284
)
PDF (312KB)
(
120
)
引用
(
)
文章推荐
更多>
低空无人机物流公众接受度研究综述
智能飞行汽车:驱动未来城市空中交通
无人驾驶航空器自主探测与避让技术研究综述
铁道车辆齿轮箱动力学与故障诊断研究综述
FMEA/FMECA在船舶工程中的应用综述
关键词检索
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
期刊检索
2026年
2025年
2024年
2023年
2022年
2021年
2020年
2019年
2018年
2017年
2016年
2015年
2014年
2013年
2012年
2011年
2010年
2009年
2008年
2007年
2006年
2005年
2004年
2003年
2002年
2001年
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
期刊动态
更多>
翟婉明院士莅临《交通运输工程学报》轨道交通方向青年编委会会议,指导办刊工作
《交通运输工程学报》“大宗固废在交通运输工程中的资源化利用”专刊征稿
《交通运输工程学报》“航空运输业与航空制造业融合下的前沿技术、装备与系统”专刊征稿
《交通运输工程学报》“水路交通智能技术与装备”专刊征稿
学报动态
《交通运输工程学报》“多年冻土区交通基础设施韧性提升技术” 专刊征稿启事
作者园地
更多>
关于文章中的中国地图
中图分类号
友情链接
更多>
《工程索引》(Ei Compendex)
《斯高帕斯数据库》(Scopus)
交通运输工程学报(CNKI)
长安大学学术期刊管理中心
交通运输工程学报(英文)
中国公路学报
×
Close
导出文件
文件类别
RIS(可直接使用Endnote编辑器进行编辑)
Bib(可直接使用Latex编辑器进行编辑)
Txt
引用内容
引文——仅导出文章的Citation信息
引文和摘要——导出文章的Citation信息和文章摘要信息
×
Close
引用参考文献格式