首页
期刊简介
编委会
期刊在线
网络首发
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
出版伦理
AI使用声明
同行评审及出版流程
投稿模板
版权转让协议
期刊订阅
联系我们
编辑团队
联系方式
English
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
首页
期刊简介
编委会
期刊在线
网络首发
当期目录
过刊浏览
下载排行
浏览排行
引用排行
高级检索
作者须知
出版伦理
AI使用声明
同行评审及出版流程
投稿模板
版权转让协议
期刊订阅
联系我们
编辑团队
联系方式
English
留言板
尊敬的读者、作者、审稿人, 关于本刊的投稿、审稿、编辑和出版的任何问题, 您可以本页添加留言。我们将尽快给您答复。谢谢您的支持!
姓名
邮箱
手机号码
标题
留言内容
验证码
用户中心
作者投稿
作者查询
专家审稿
编辑办公
期刊信息
(2001年创刊 月刊 )
主 管:
中华人民共和国教育部
主 办:
长安大学
编辑出版:
《交通运输工程学报》编辑部
主 编:
沙爱民
地 址:
陕西省 西安市 南二环 路中段 长安大学《交通运输工程学报》编辑部
邮 编:
710064
电 话:
029-82334388
邮 箱:
jygc@chd.edu.cn
国内发行:
中国邮政集团有限公司陕西省报刊发行局
国外发行:
中国国际图书贸易集团有限公司
标准刊号:
ISSN
1671-1637
CN
61-1369/U
CODEN
JYGXAS
学报微信视频号
学报微信公众号
重要源期刊收录
更多>
《交通运输工程学报》收录信息
《铁路运输领域高质量科技期刊分级目录》T1级
《公路运输领域高质量科技期刊分级目录》T1级
美国《工程索引》(Ei Compendex)
《文摘和引文数据库》(Scopus)
日本科学技术振兴机构(JST)中国文献数据库
邮件订阅
RSS
2022年 第22卷 第3期
栏目
综述
交通信息工程及控制
上一期
|
下一期
选择全部
显示方式:
综述
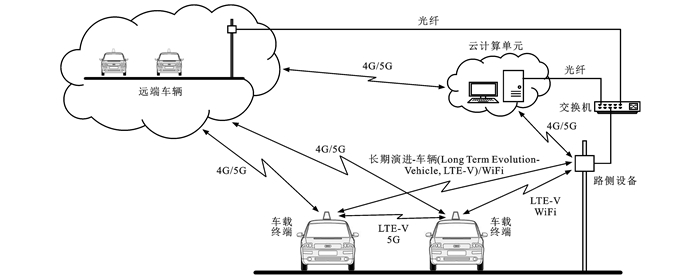
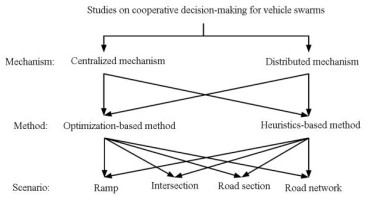
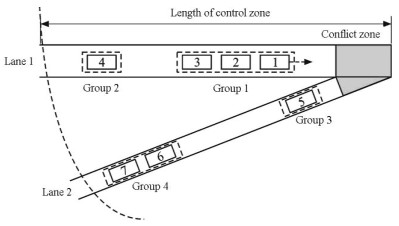
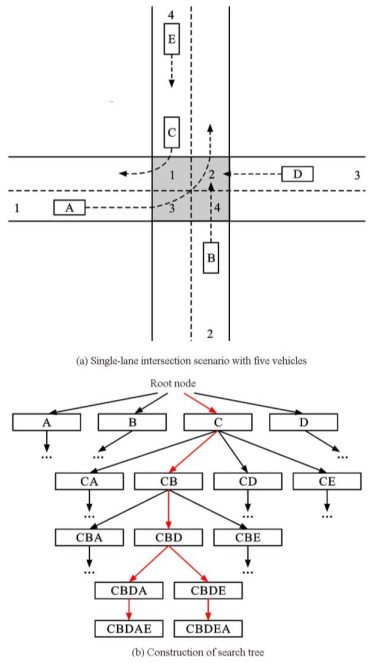
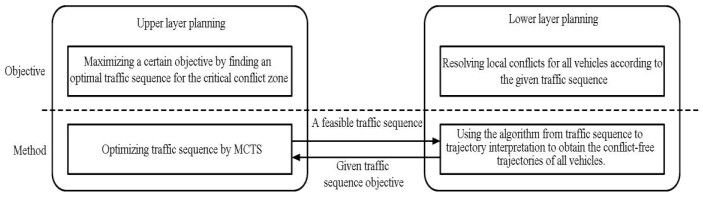
车路协同环境下车辆群体协同决策研究综述
张毅
,
裴华鑫
,
姚丹亚
摘要:
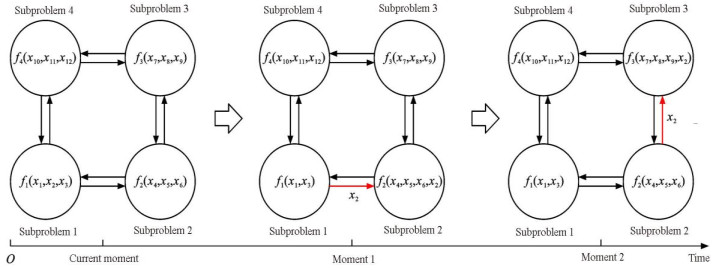
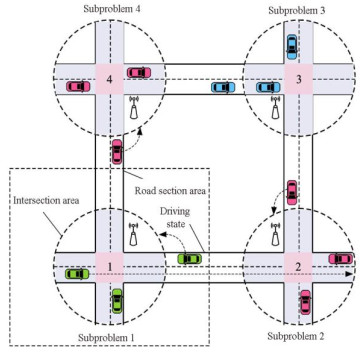
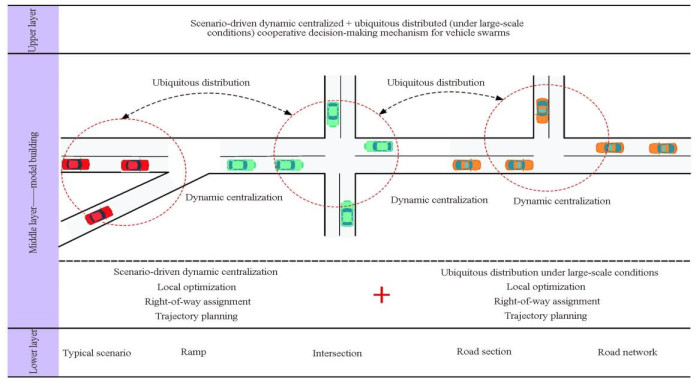
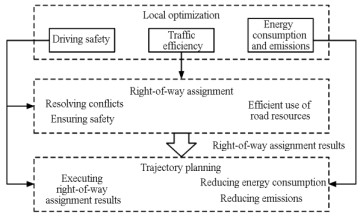
从车路协同环境下车辆群体协同决策机制、协同决策方法与典型应用场景方面分析了国内外车辆群体协同决策的研究现状;考虑车辆群体协同决策机制的不同,系统梳理了集中式和分布式2种决策机制的相关研究;针对车辆群体协同决策方法的多样性,以基于优化和基于启发式2类决策方法为主线,对比分析了不同决策方法的优劣;考虑车辆群体协同决策应用场景的不同,全面分析了匝道、路口、路段和路网等多个应用场景下车辆群体协同决策的相关理论与研究;考虑国内外车辆协同决策典型项目进展,分别梳理了中国、美国、日本和欧洲代表性车辆群体协同决策项目任务、建设与实施情况;从系统结构、普适模型和示范场景3个方面提出了未来车路协同环境下车辆群体协同决策的发展趋势。研究结果表明:集中式车辆群体协同决策机制有助于提升局部区域内的车辆通行性能,分布式车辆群体协同决策机制有助于提升全局范围内的交通运行状态;基于优化的车辆群体协同决策方法在特定场景下可最大程度提升决策效果,基于启发式的车辆群体协同决策方法在大多数场景下可获得可行的决策效果;由于不同场景下车辆群体协同决策问题的复杂性有所不同,需要在统一框架下做针对性建模。研究结果可为车路协同环境下新型混合交通系统的管理与控制提供参考。
更多>
2022, 22(3): 1-18.
doi:
10.19818/j.cnki.1671-1637.2022.03.001
摘要
(
5820
)
HTML
(
1594
)
PDF (6080KB)
(
857
)
引用
(
)
车路协同环境下混合交通群体智能仿真与测试研究综述
上官伟
,
李鑫
,
柴琳果
,
曹越
,
陈晶晶
,
庞豪杰
,
芮涛
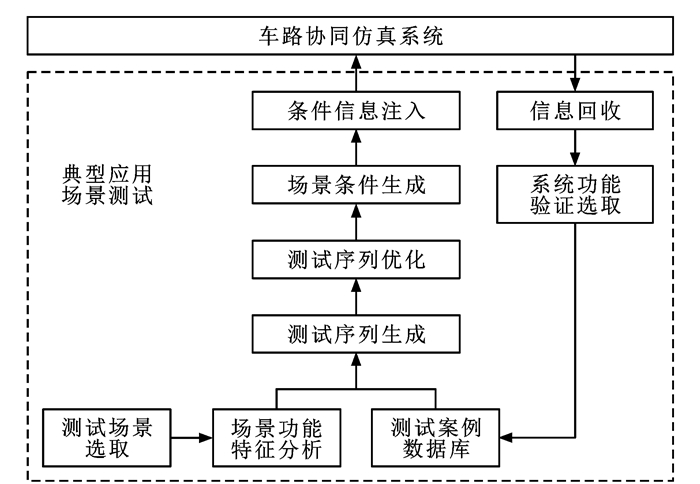
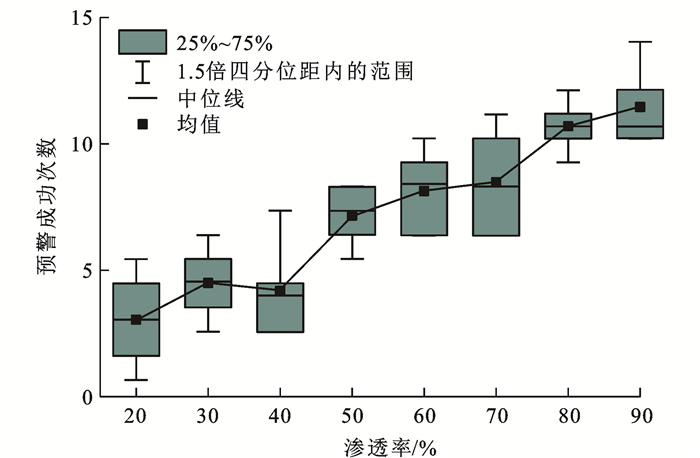
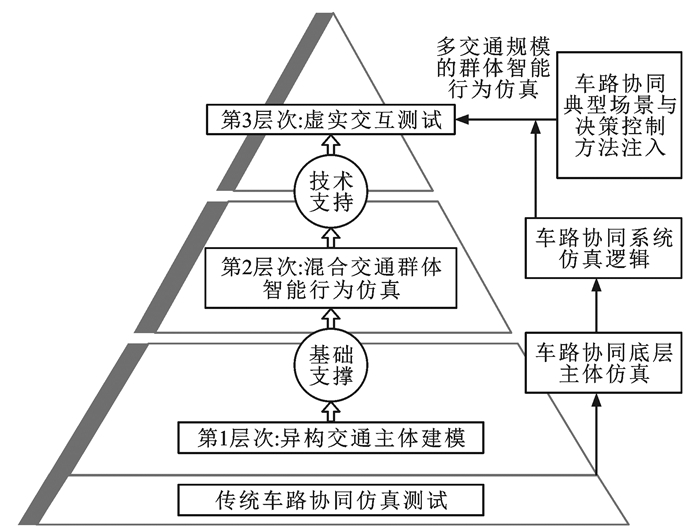
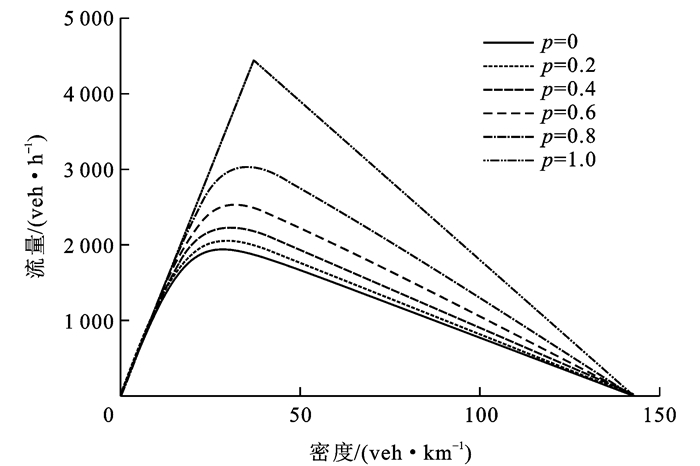
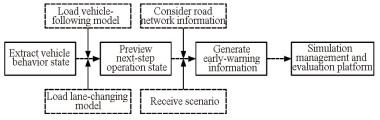
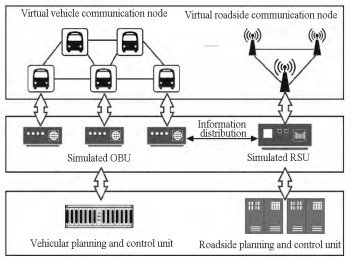
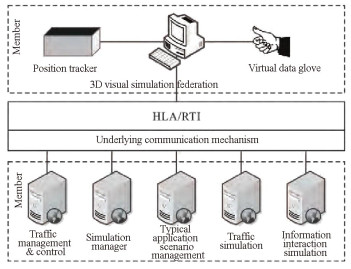
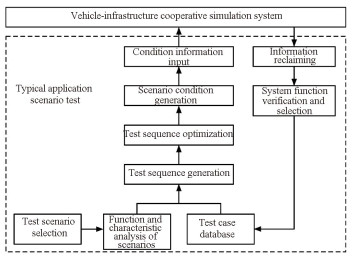
摘要:
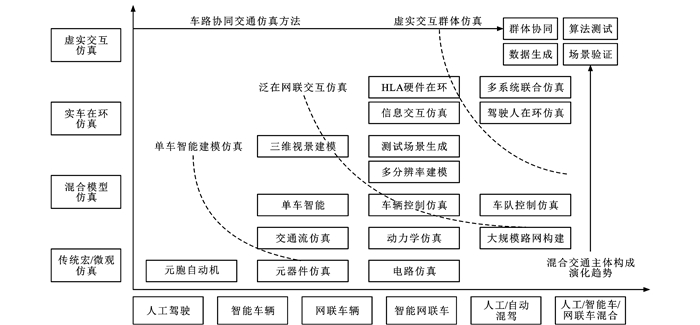
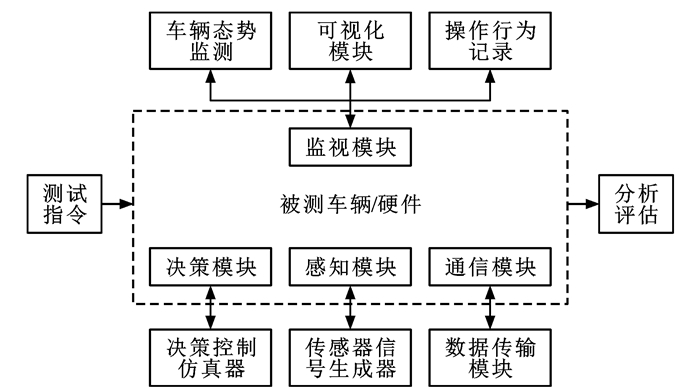
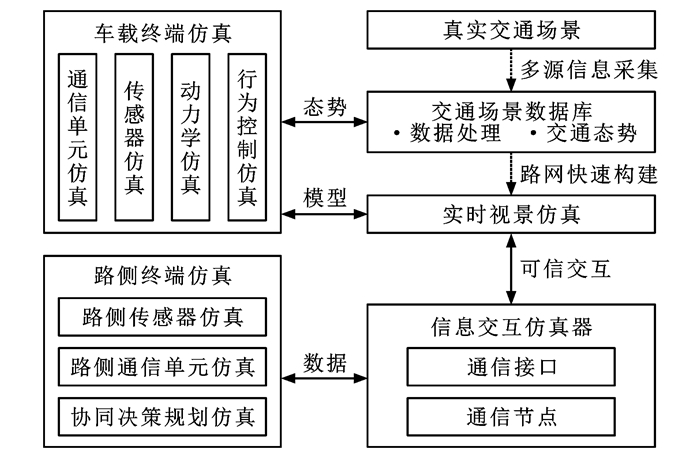
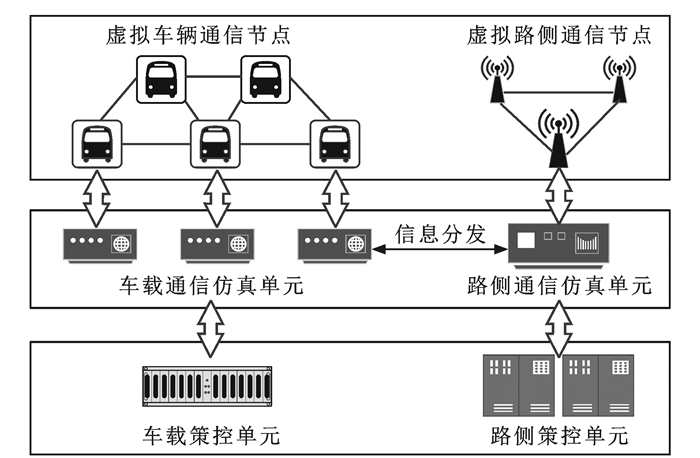
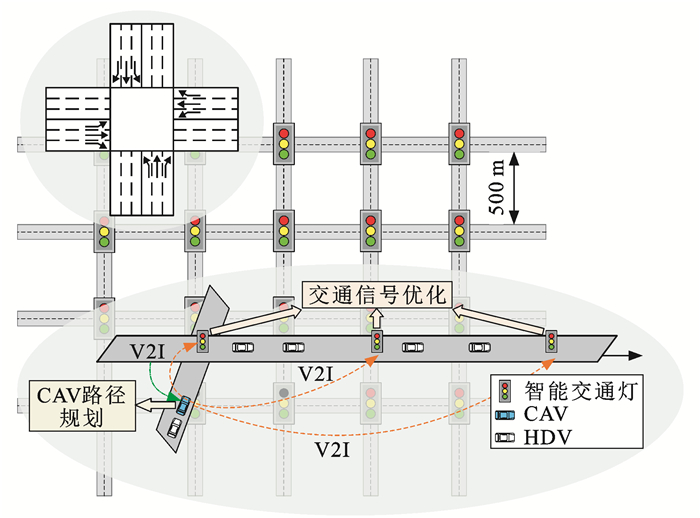
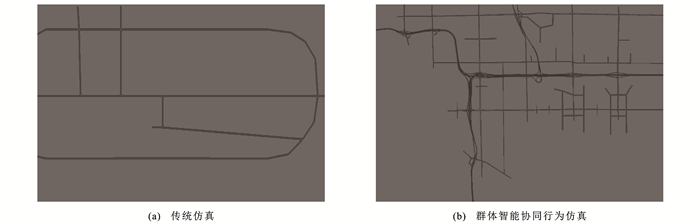
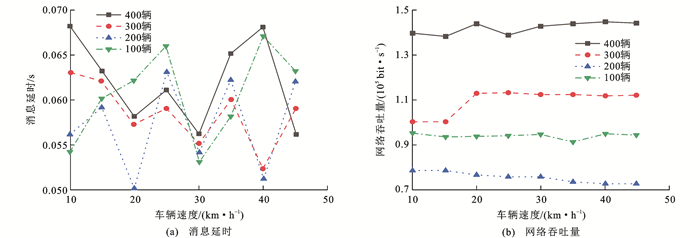
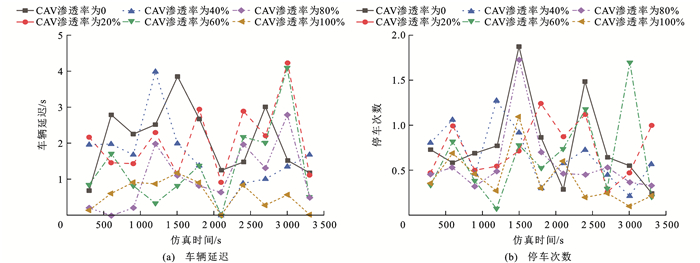
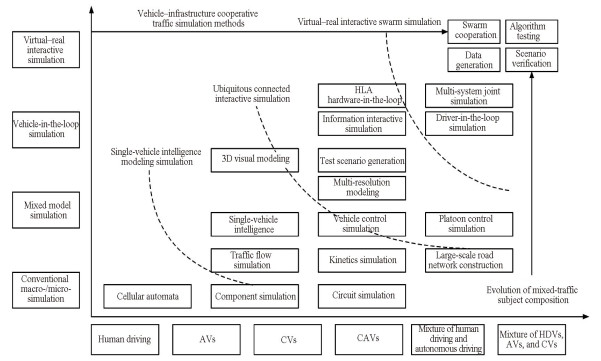
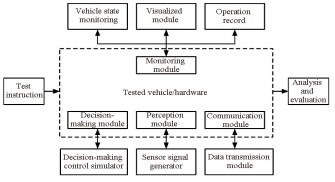
归纳了车路协同及其仿真测试技术的发展历程,并结合典型仿真结果探讨了萌芽期、起步期、发展期阶段下的仿真需求、经典方法与技术瓶颈;在此基础上,提出了基于交通主体建模、群体行为仿真、测试结果分析的3层新型虚实交互仿真测试架构;针对混合交通主体仿真需求构建了异构交通主体模型,解析了混合交通运行机理,以此作为仿真系统底层模型支撑;结合设计的虚实交互仿真测试架构,突破了混合交通群体智能场景生成技术,提出了混合交通群体智能仿真方法;在此基础上,选取交叉口和路段典型交通场景,开展了不同群体智能决策控制方法的仿真试验,以验证所提方法的效能;最后,总结了车路协同的未来发展方向和相关建议。研究结果表明:相比于传统仿真测试方法,提出的虚实交互仿真测试方法的系统仿真粒度从500 ms减小到100 ms以内,仿真规模从9个节点和500个交通主体提升到150个节点和2 000个交通主体,仿真场景数量由36个扩展到98个,实现了异构交通主体渗透率0~100%动态可调,有效提高了车路协同混合交通仿真测试的效率、规模和覆盖度;目前新型混合交通环境下车路协同仿真测试需求快速朝着群体化、智能化、规模化演变,开展基于虚实交互和运行环境数据模拟的车路协同群体智能仿真测试方法技术研究,将有力推动下一代智能交通系统的发展。
更多>
2022, 22(3): 19-40.
doi:
10.19818/j.cnki.1671-1637.2022.03.002
摘要
(
5458
)
HTML
(
1273
)
PDF (19201KB)
(
553
)
引用
(
)
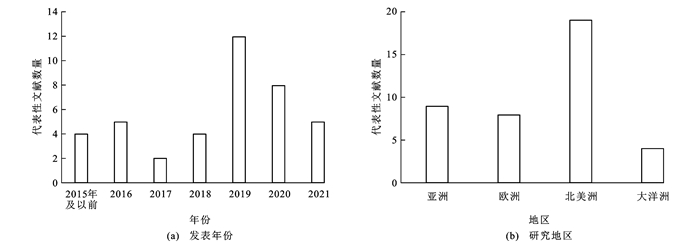
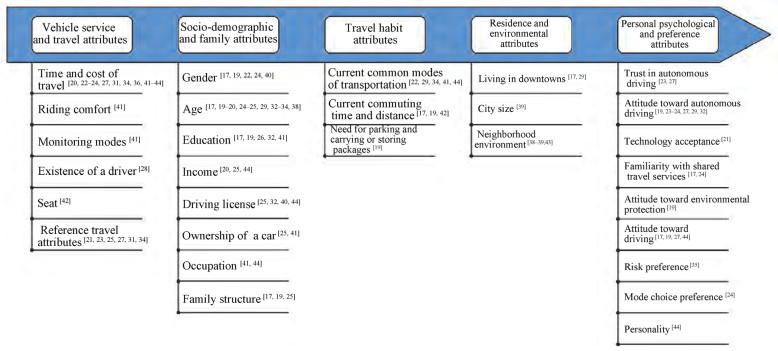
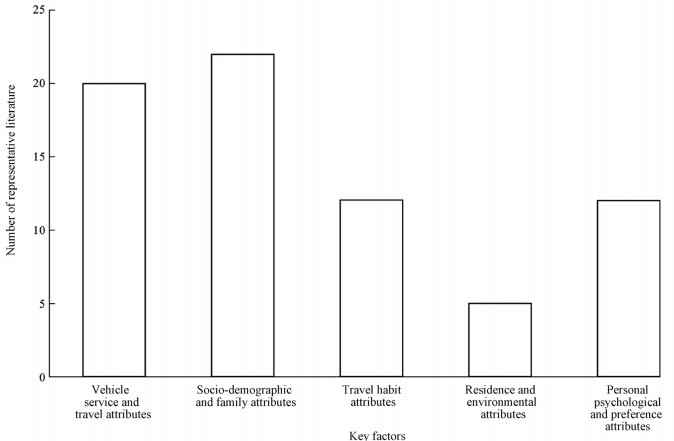
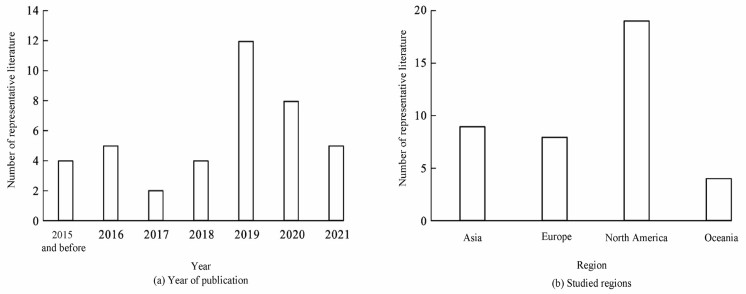
自动驾驶影响下的出行行为研究综述
李瑞敏
,
戴晶辰
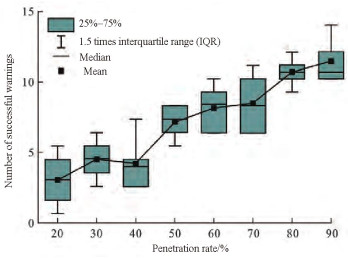
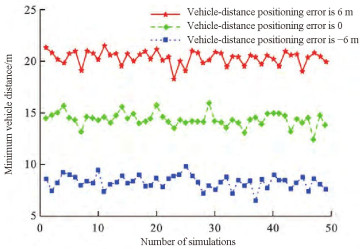
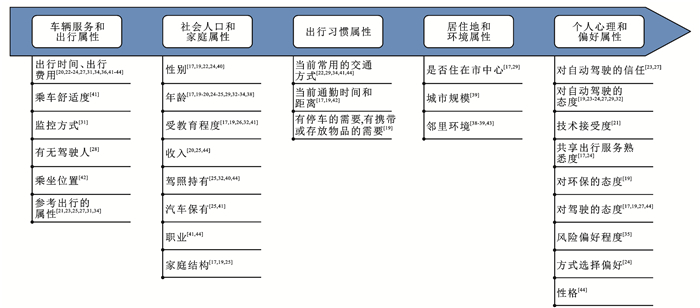
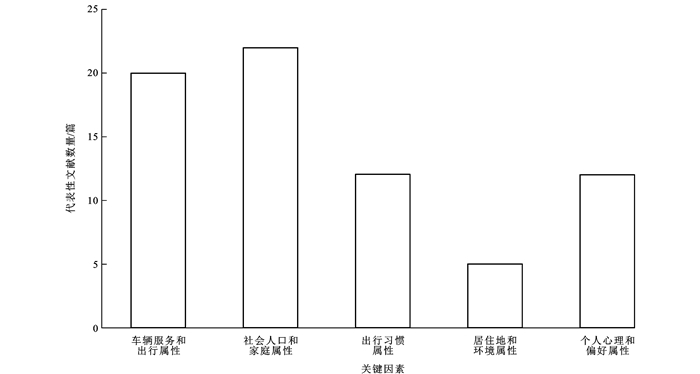
摘要:
从小汽车出行总需求、出行方式选择、在途时间利用三方面梳理了自动驾驶影响下的出行行为研究现状,分析了用于研究自动驾驶对出行行为影响的数据基础与研究方法,总结了影响自动驾驶环境下出行方式选择的关键因素,指出了出行行为研究存在的问题和未来发展方向。研究结果表明:出行总需求的相关研究主要关注当前服务不足人口的潜在出行,大多通过需求假设分析潜在的变化,在假设的可靠性和结果的准确度方面还存在不足;出行方式选择的相关研究显示车辆服务和出行属性、社会人口和家庭属性、出行习惯属性、居住地和环境属性、个人心理和偏好属性等是影响出行方式选择的关键因素,考虑到不同的研究对象、场景设计与分析方法,性别、年龄、持有驾照、家庭结构等因素对出行行为的具体影响还有待进一步检验;人们对自动驾驶时代在途时间利用的方式和受益程度的认知存在较大的不确定性与异质性,亟需理论模型来进一步讨论潜在的时间利用变化;基于自动驾驶对出行行为影响相关研究的局限性,提出了建立自动驾驶汽车的规范化描述和丰富数据采集方式,开展横向与纵向对比研究,加强各影响因素异质性的考量,辨析自动驾驶时代各类出行行为间的相互影响机制的改进方向。
更多>
2022, 22(3): 41-54.
doi:
10.19818/j.cnki.1671-1637.2022.03.003
摘要
(
4663
)
HTML
(
944
)
PDF (4588KB)
(
478
)
引用
(
)
交通信息工程及控制
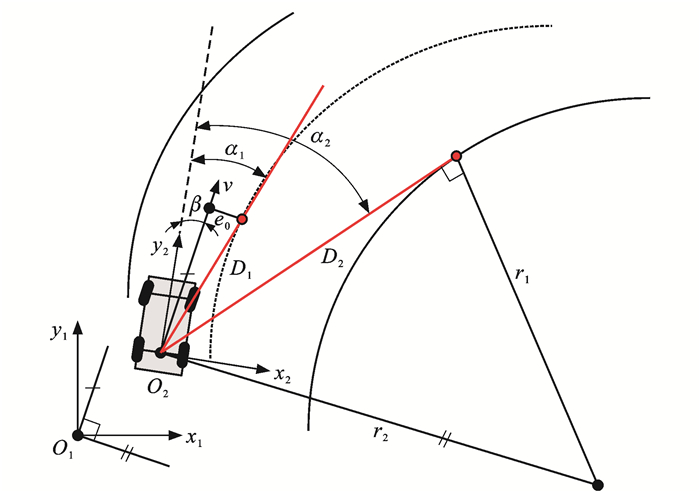
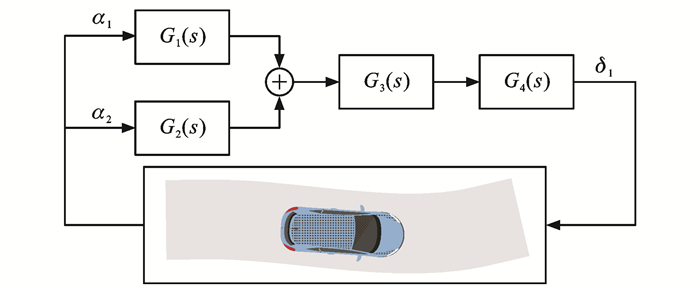
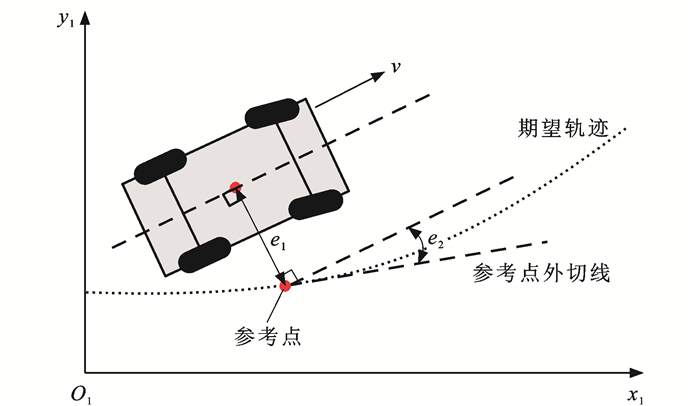
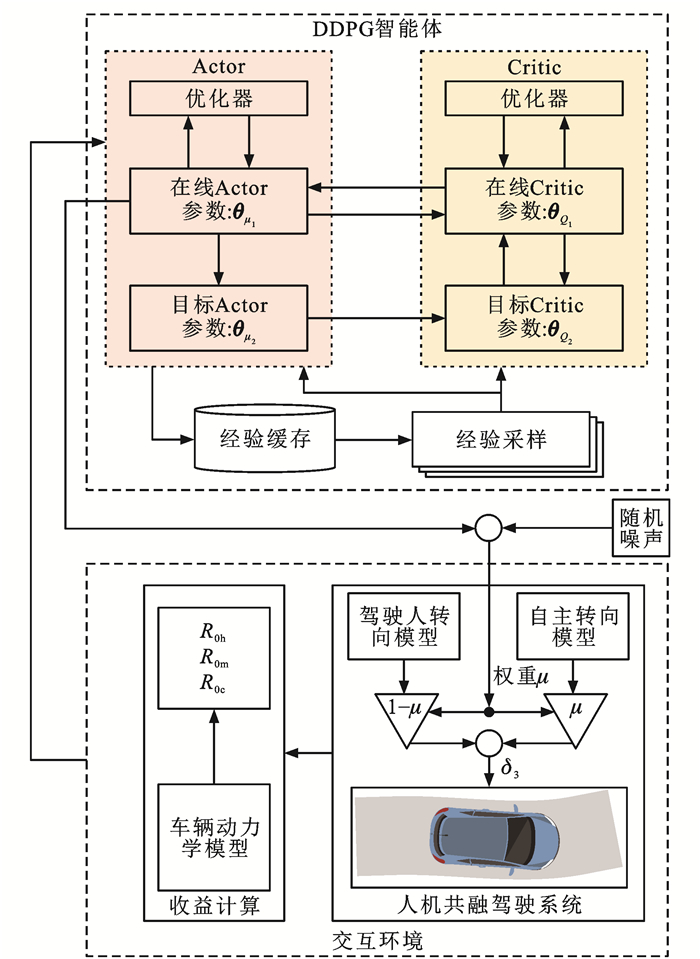
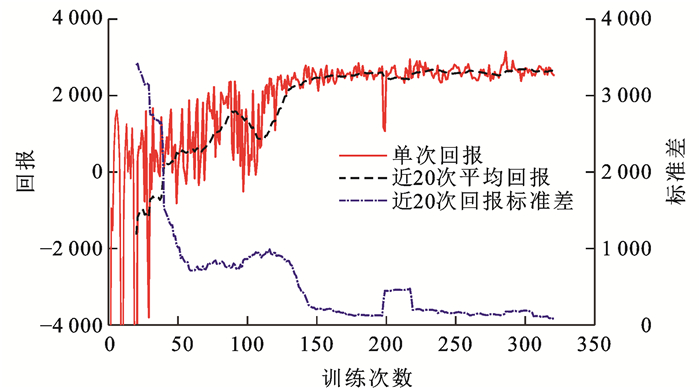
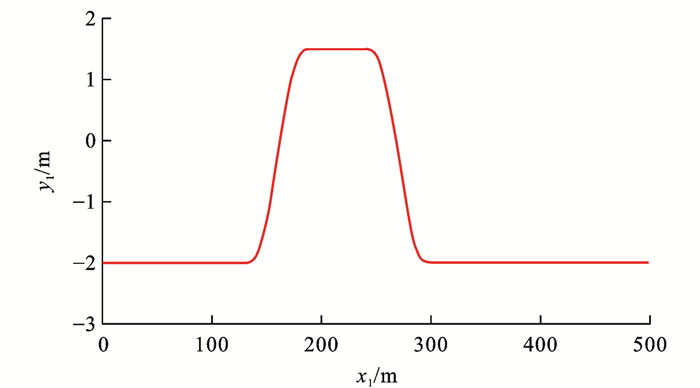
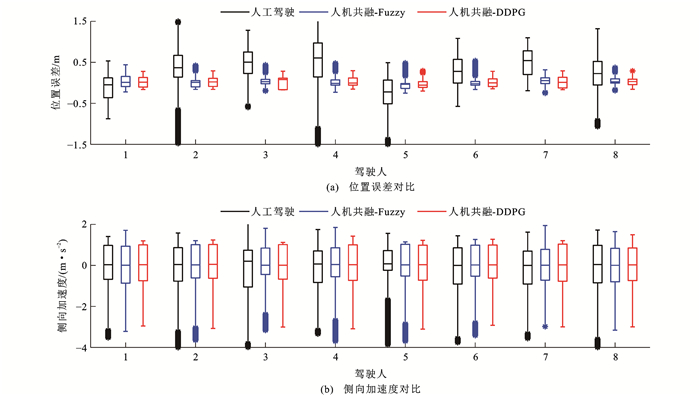
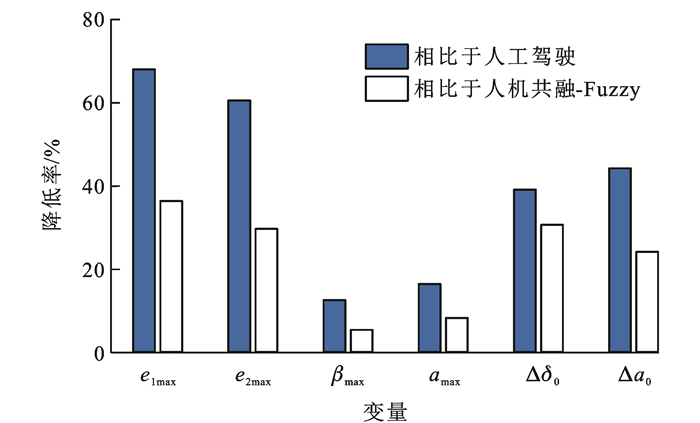
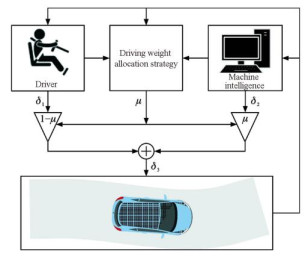
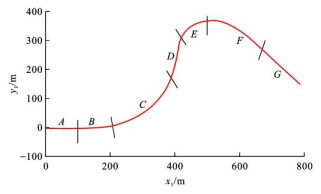
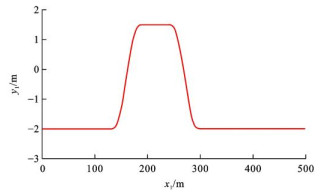
基于强化学习的智能车人机共融转向驾驶决策方法
吴超仲
,
冷姚
,
陈志军
,
罗鹏
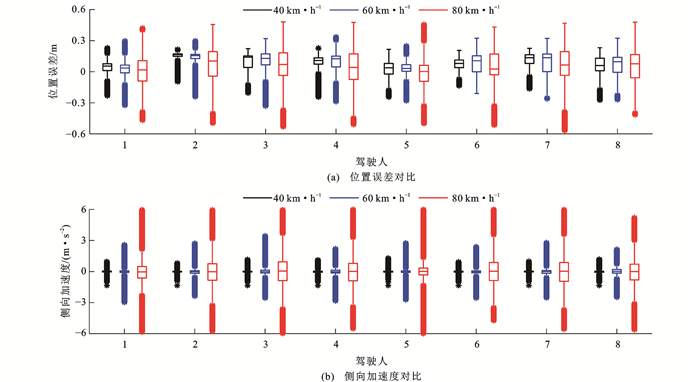
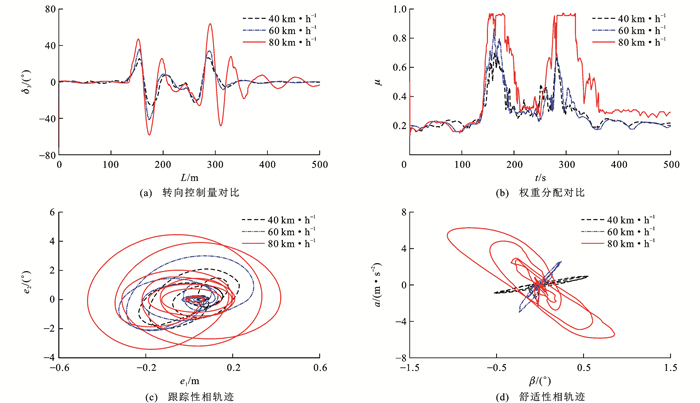
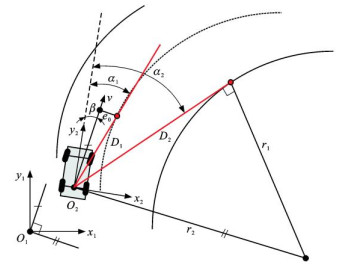
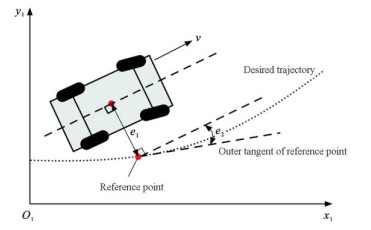
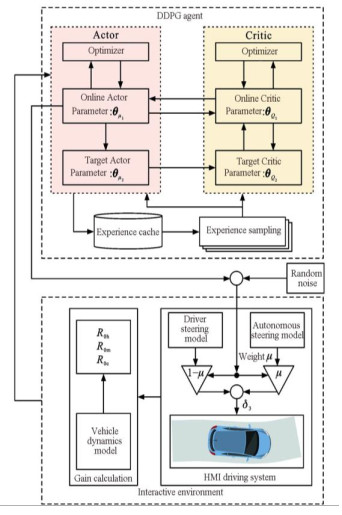
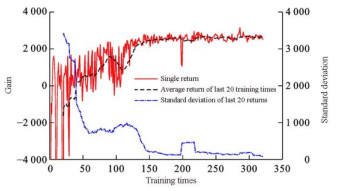
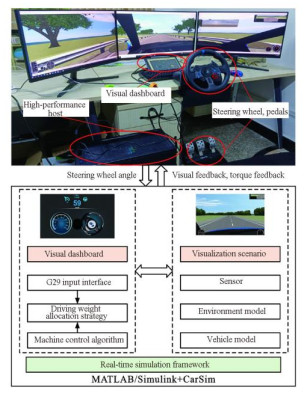
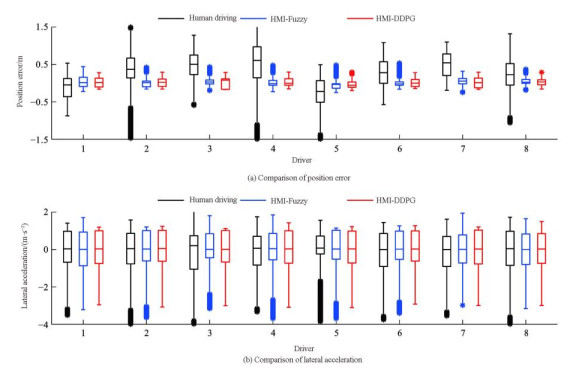
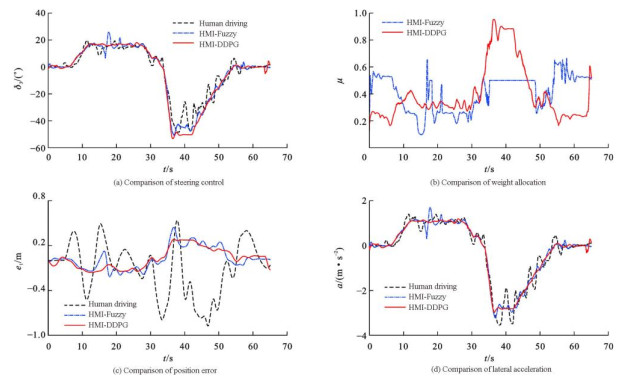
摘要:
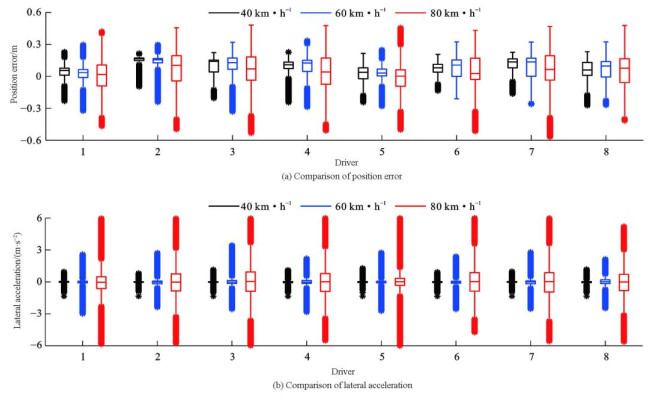
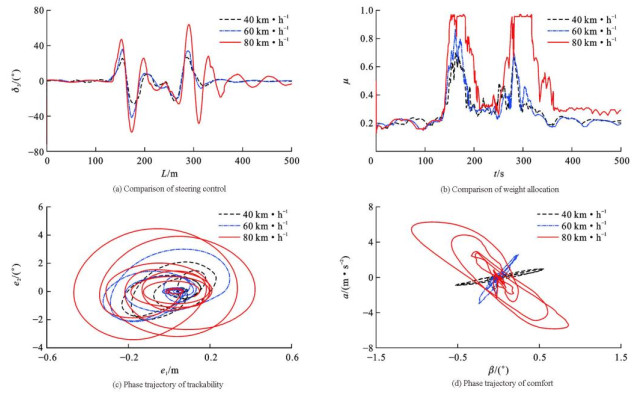
针对智能车人机共融驾驶系统中人和自主驾驶系统的驾驶权连续动态分配问题,尤其是因建模误差导致的权重分配方法适应性低的难题,提出了基于强化学习的人机共融转向驾驶决策方法;考虑驾驶人的转向特性,搭建了基于双点预瞄的驾驶人模型,并采用预测控制理论建立了智能车自主转向控制模型,构建了智能车人机同时在环的转向控制框架;基于Actor-Critic强化学习架构,设计了用于人机驾驶权分配的深度确定性策略梯度(DDPG)智能体,以曲率契合度、跟踪精确性和乘坐舒适性为目标,提出了基于模型的收益函数;构建了人机共融驾驶权分配强化学习框架,包含驾驶人模型、自主转向模型、驾驶权分配智能体以及收益函数;为了验证方法的有效性,招募了8位驾驶人开展共计48人次的模拟驾驶试验。研究结果表明:在曲率适应性验证中,人机共融-DDPG方法优于人工驾驶和人机共融-Fuzzy方法,跟踪性平均提升70.69%、39.67%,舒适性平均提升18.34%、7.55%;在速度适应性验证中,车速为40、60和80 km·h
-1
条件下,驾驶人权重大于0.5的时间占比分别为90.00%、85.76%、60.74%,且跟踪性相轨迹和舒适性相轨迹都能有效收敛。可见,提出的方法能够适应曲率和车速变化,在保证安全性的前提下提升了跟踪性和舒适性。
更多>
2022, 22(3): 55-67.
doi:
10.19818/j.cnki.1671-1637.2022.03.004
摘要
(
3519
)
HTML
(
894
)
PDF (13174KB)
(
413
)
引用
(
)
车路协同环境下群体车辆诱导与协同运行方法
上官伟
,
庞晓宇
,
李秋艳
,
柴琳果
摘要:
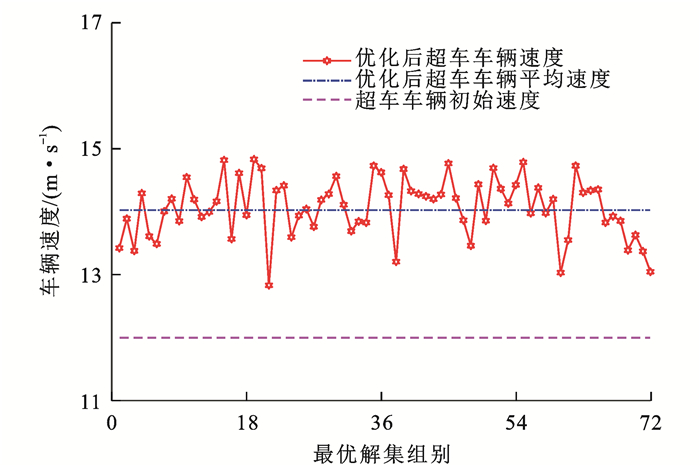
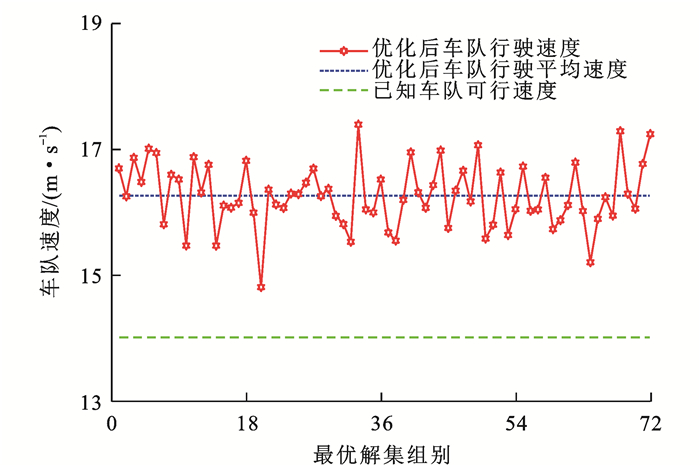
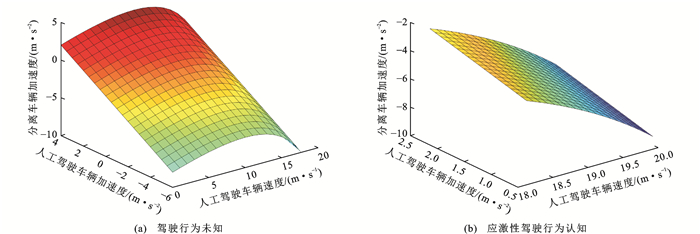
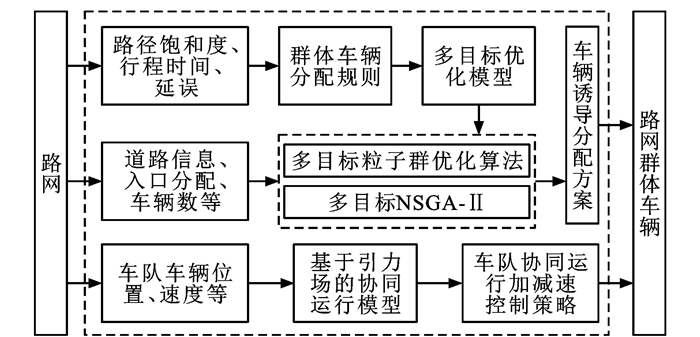
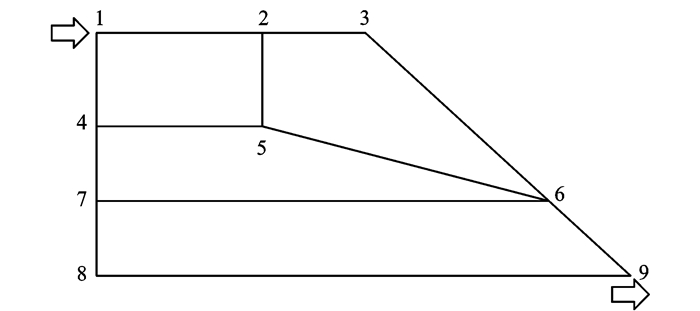
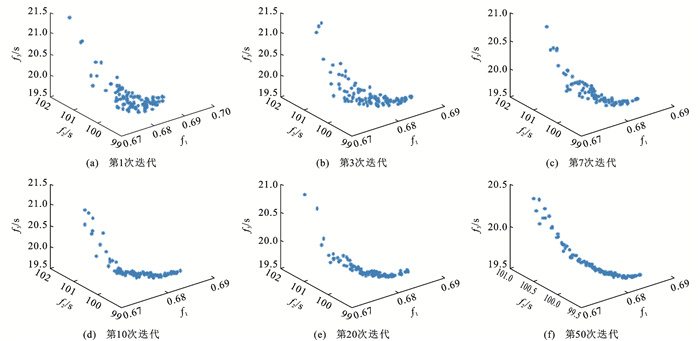
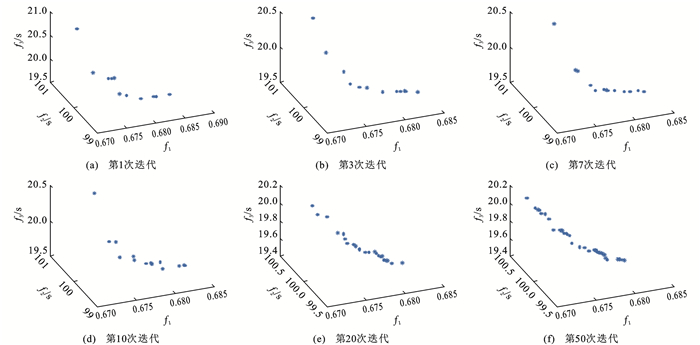
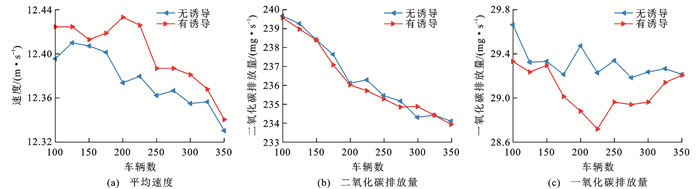
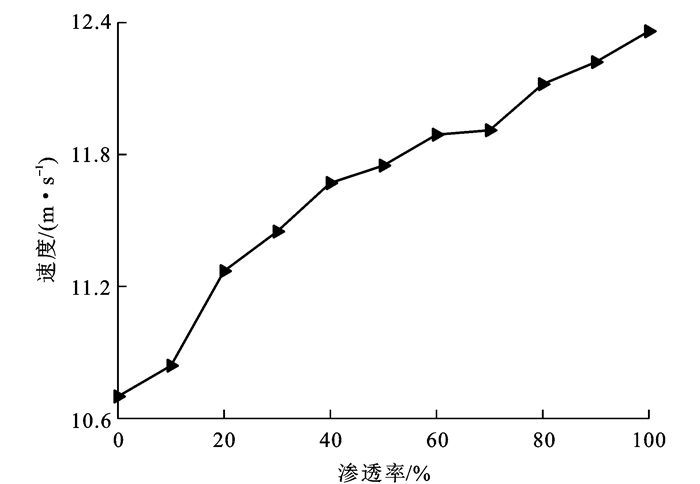
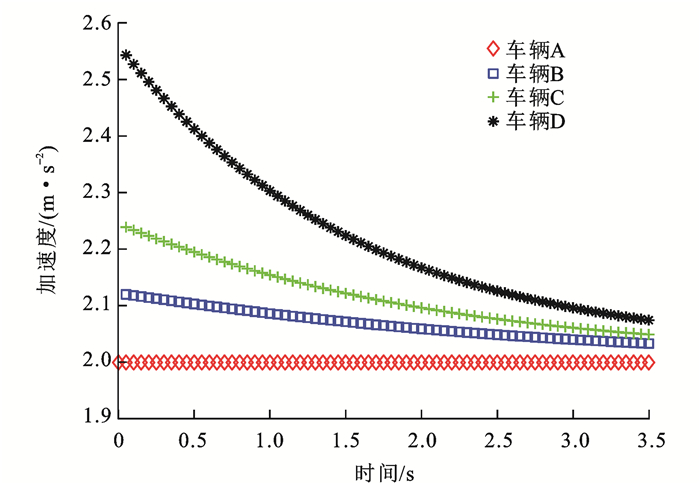
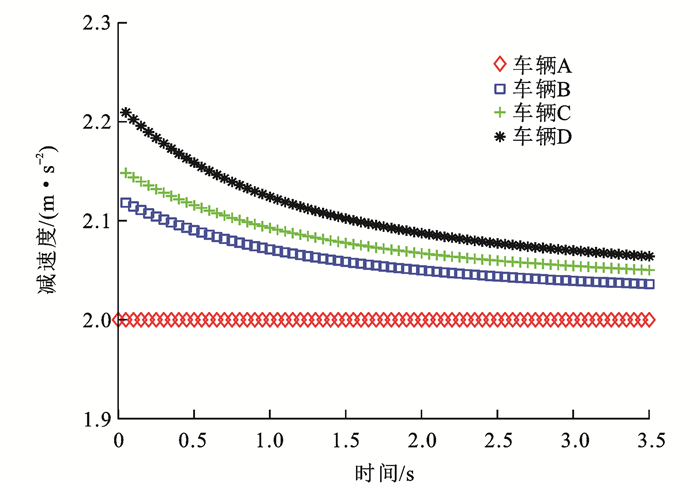
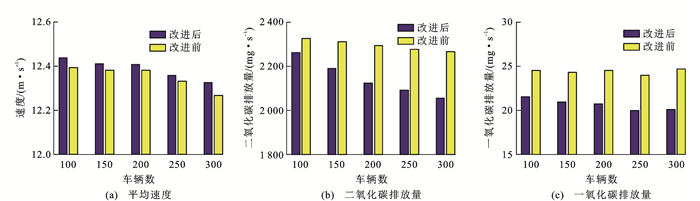
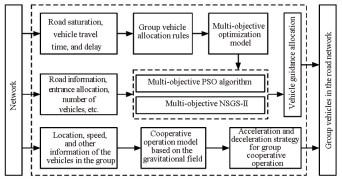
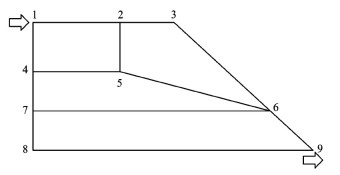
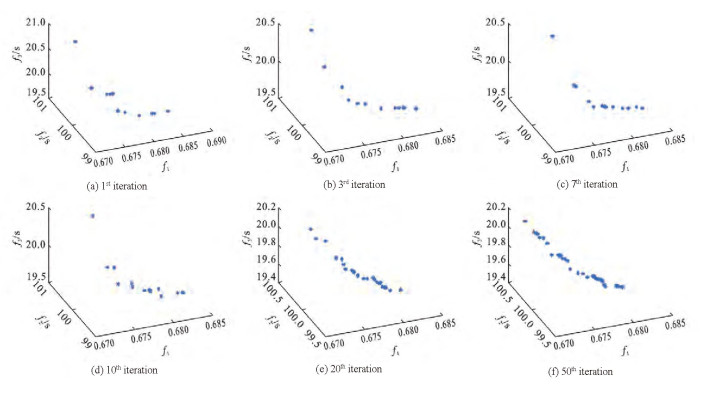
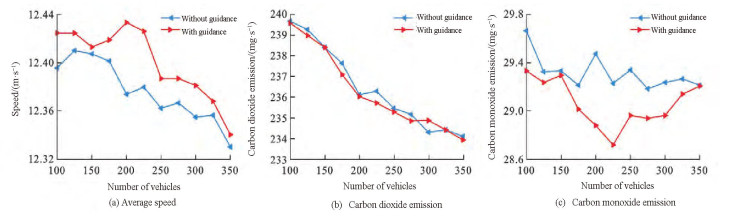
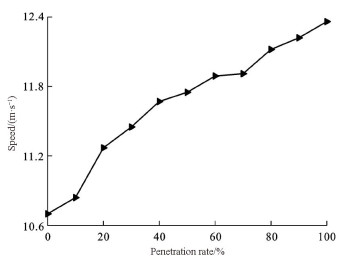
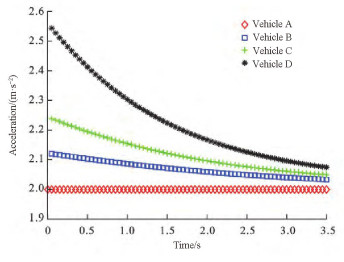
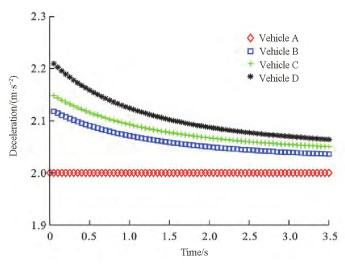
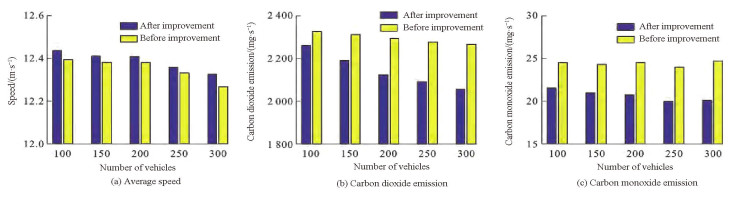
为解决城市发展带来的交通拥堵问题,发掘道路交通的潜力,提高车路协同环境下车辆在路网中的行驶效率,面向群体车辆提出了一种诱导优化方法和协同控制策略;在车辆诱导分配方面,在起始点和目的地之间的可达路径中,以交通效率最优、车辆排放最小为目标,设计了基于道路饱和度、车辆行程时间和延误的群体车辆分配规则,建立了群体车辆诱导分配优化模型,并用多目标非支配排序遗传算法-Ⅱ(NSGA-Ⅱ)和多目标粒子群优化算法进行求解;在车辆协同运行控制策略方面,基于引力场思想建立了多车协同运行模型,并提出了多车协同加减速策略;通过仿真验证比较了不同网联自动驾驶车辆(CAV)渗透率下的车辆诱导优化结果,同时仿真了车辆协同加减速策略,并将诱导优化方法和协同控制策略进行了联合仿真。仿真结果表明:多目标诱导分配方法可以提升车辆速度和环境效益,且群体车辆平均速度与CAV渗透率正相关;在四车组队行驶环境中,车辆协同加减速策略能够将车辆在加速和减速时的初始平均加速度分别提高15.0%和8.2%,让车辆快速达到目标速度,保障行车安全;在联合仿真环境中,路网群体车辆的加速度平均提高了11.6%,速度平均提高了1.6%,碳氧化合物排放量减少约4.9%。由此可见,提出的方法能够提高路网通行效率,降低车辆能源消耗,减少对环境造成的不良影响。
更多>
2022, 22(3): 68-78.
doi:
10.19818/j.cnki.1671-1637.2022.03.005
摘要
(
2329
)
HTML
(
668
)
PDF (7569KB)
(
288
)
引用
(
)
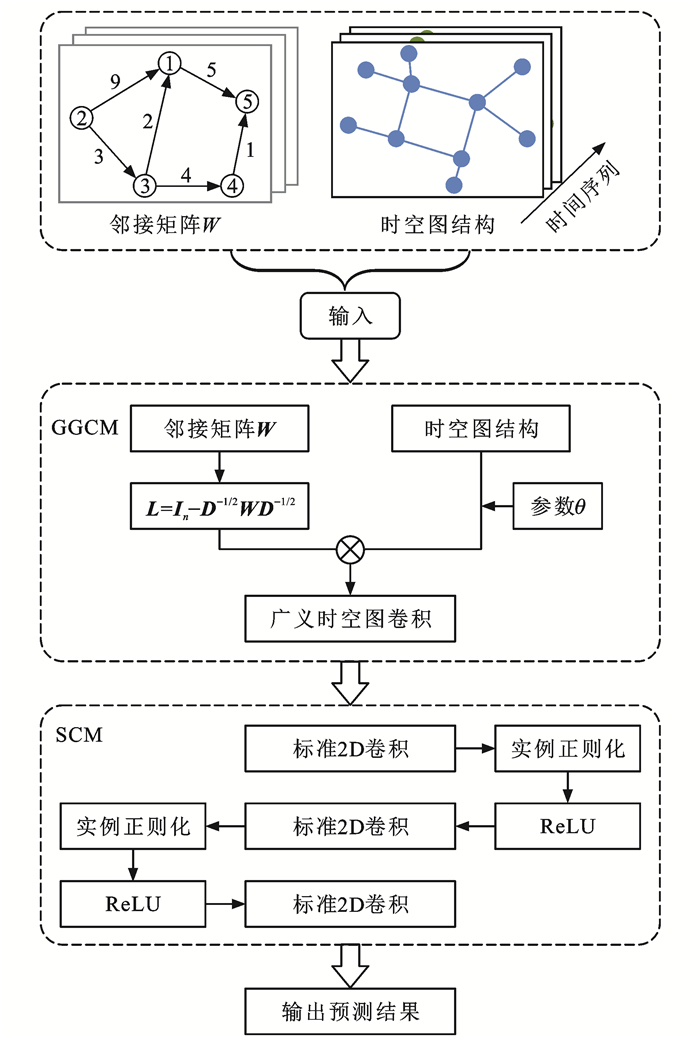
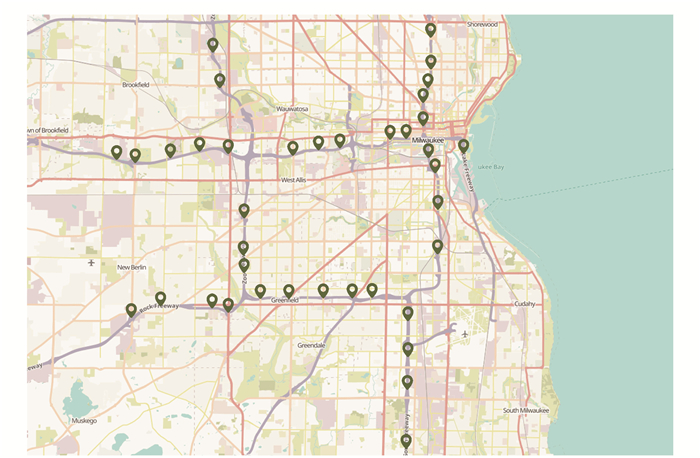
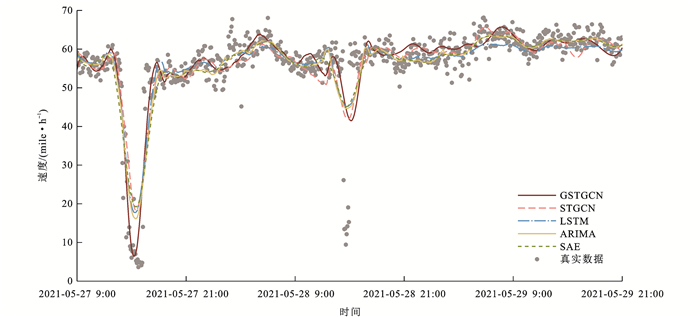
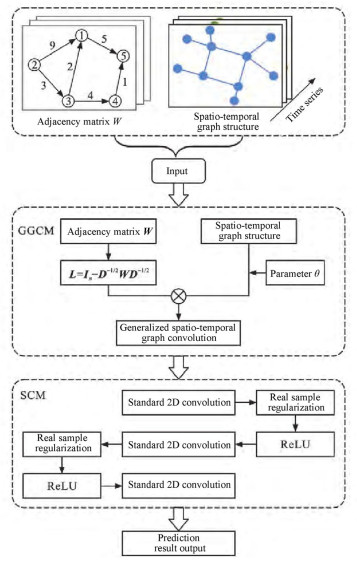
基于广义时空图卷积网络的交通群体运动态势预测
曲栩
,
甘锐
,
安博成
,
李林恒
,
陈志军
,
冉斌
摘要:
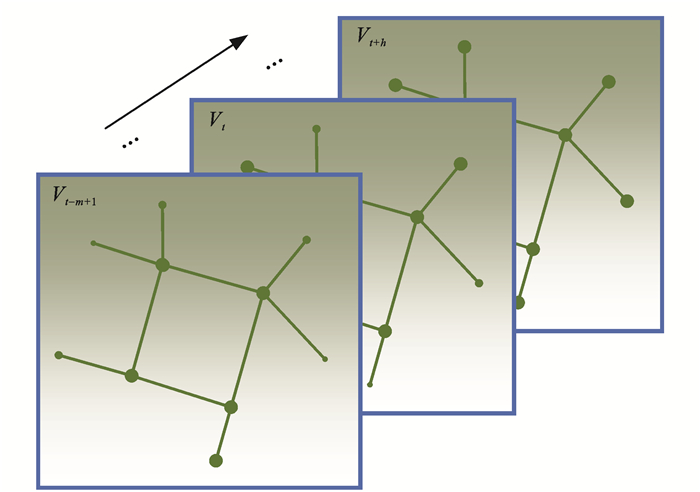
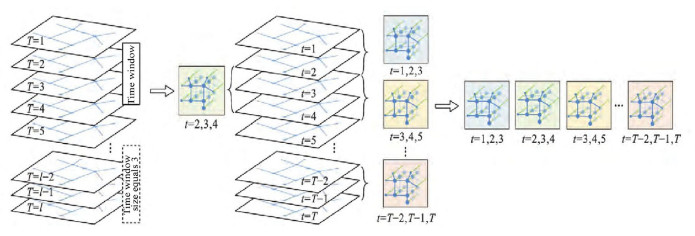
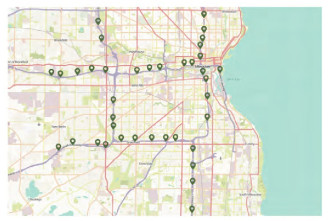
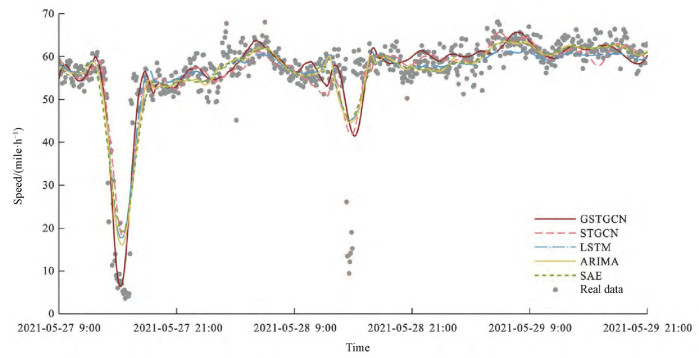
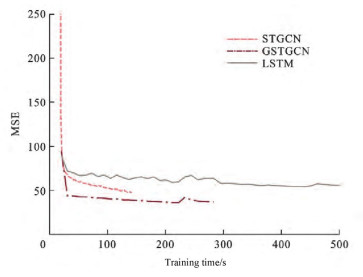
针对当前高速公路与城市快速路交通拥堵现象愈发严重,为交通管理与控制造成巨大困难的问题,提出了一种基于广义时空图卷积网络(GSTGCN)的交通速度预测模型;基于交通数据自身具有的复杂时空特性,定义了广义交通数据图结构,同时构建了广义图的邻接关系;基于图卷积网络基础理论,采用切比雪夫近似与一阶近似简化了图卷积操作的计算成本,建立了广义图卷积算子;结合广义图卷积模块、标准卷积模块与线性全连接层,提出了用于提取复杂交通数据时间、空间特征的GSTGCN模型;利用美国威斯康星州密尔沃基市快速路网上架设的38个检测器,在21个工作日以每5 min为单位记录了车辆速度、流量和占有率数据,测试了GSTGCN模型在该数据集上的短期交通速度预测精度与训练效率。分析结果表明:相较于传统自回归求和滑动平均(ARIMA)模型、长短时记忆(LSTM)模型以及近期的STGCN模型,GSTGCN模型在交通速度的均方根误差、平均绝对误差和平均绝对百分比误差指标上分别降低了22.79%、22.97%和16.73%;此外,GSTGCN模型的训练时长比STGCN模型和LSTM模型分别降低了5.17%和75.71%。可见,GSTGCN模型能够有效处理复杂交通时空数据结构,准确预测交通速度,并为交通管控提供交通群体的运动态势信息。
更多>
2022, 22(3): 79-88.
doi:
10.19818/j.cnki.1671-1637.2022.03.006
摘要
(
2884
)
HTML
(
936
)
PDF (7111KB)
(
276
)
引用
(
)
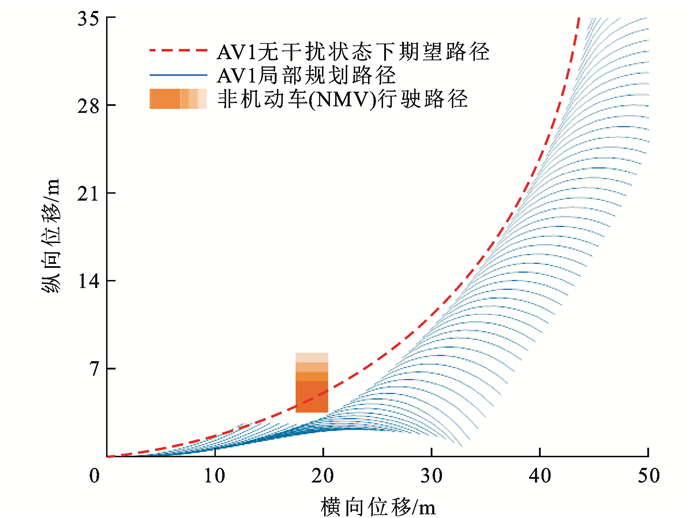
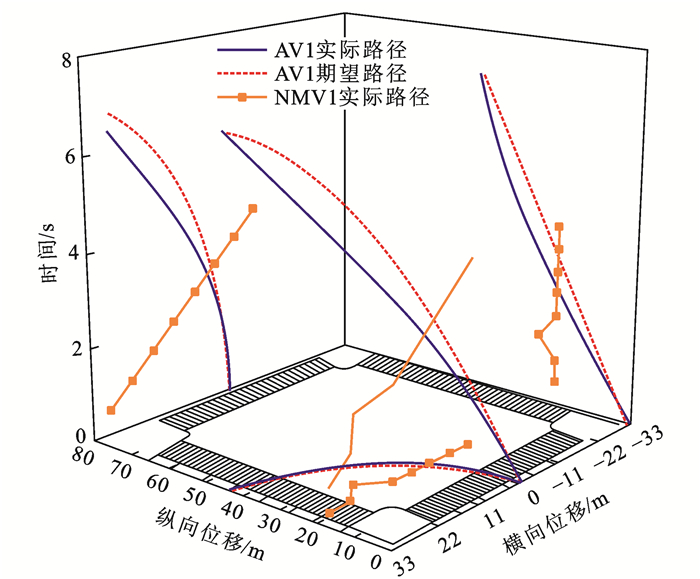
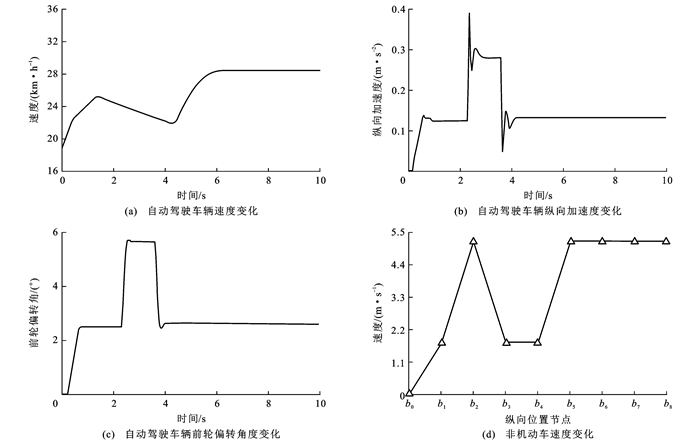
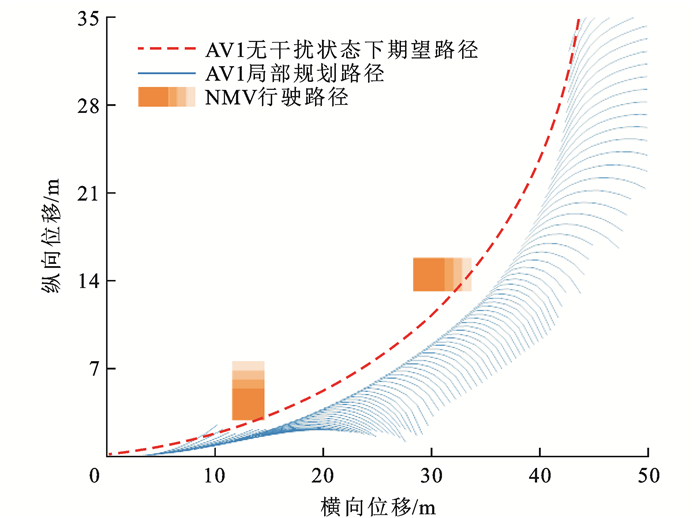
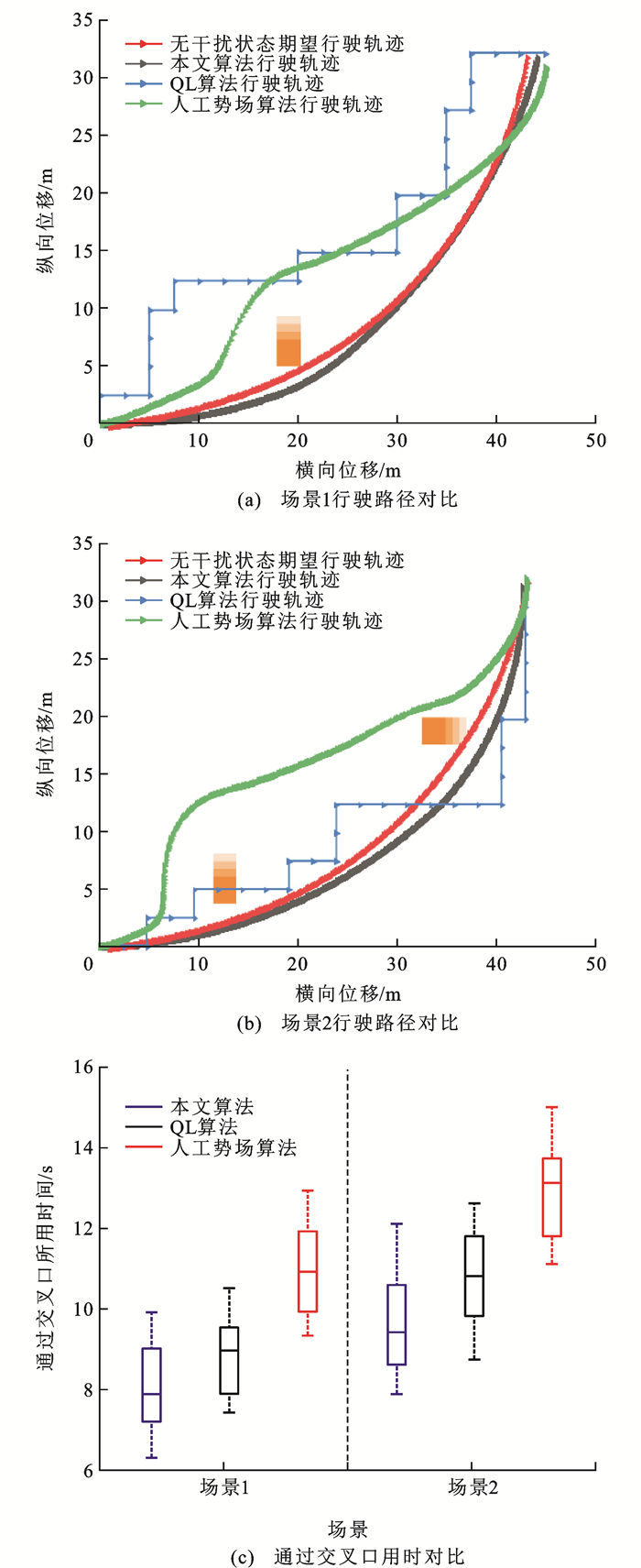
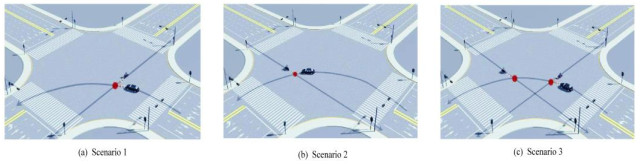
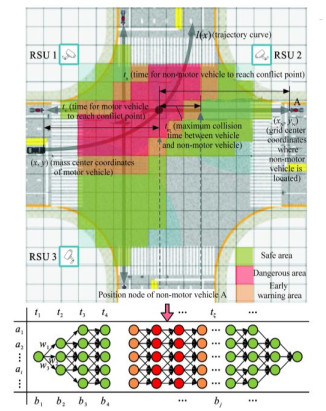
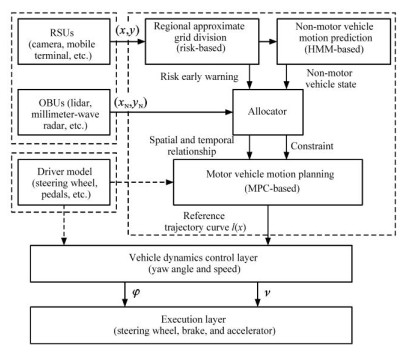
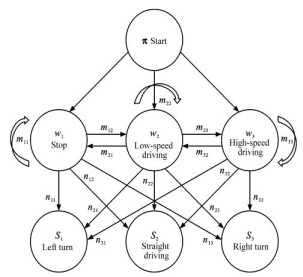
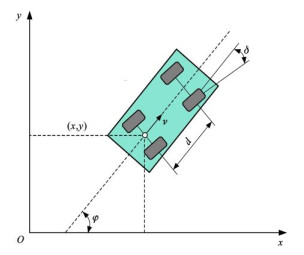
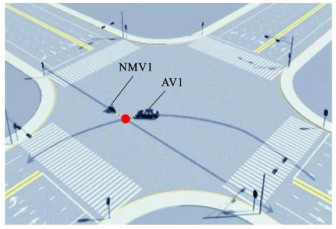
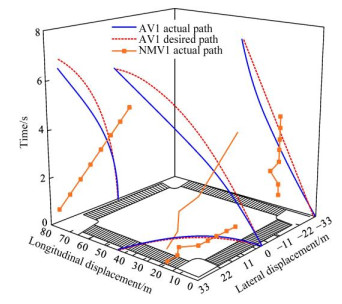
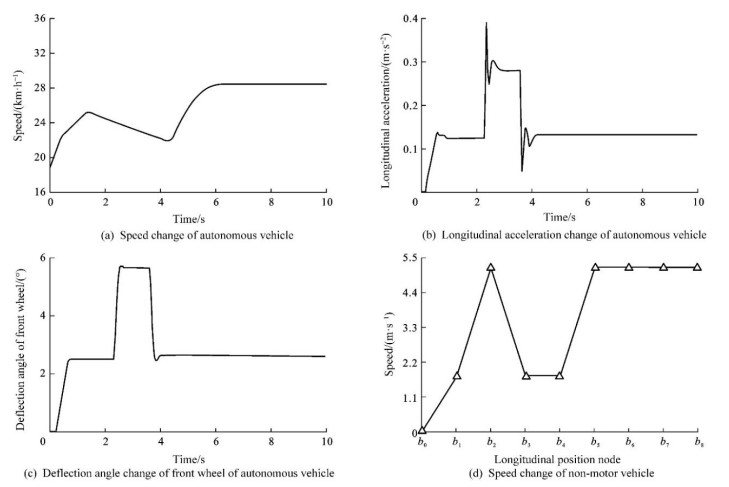
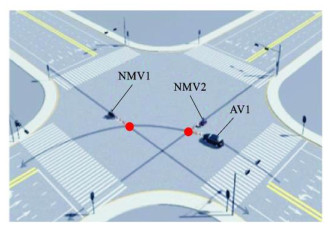
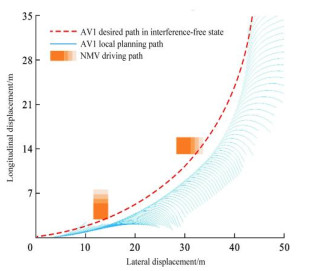
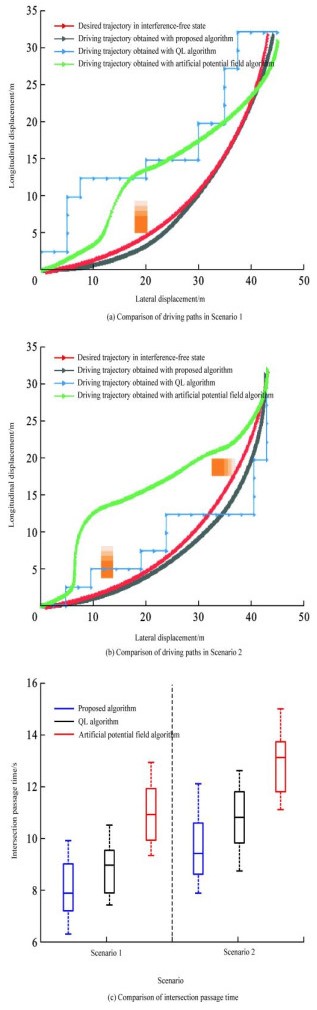
基于机非冲突近似网格风险评估的自动驾驶左转运动规划模型
王萍
,
齐旭东
,
杨静文
,
韩瑜
,
李立
,
汪贵平
,
姚俊峰
,
赵祥模
摘要:
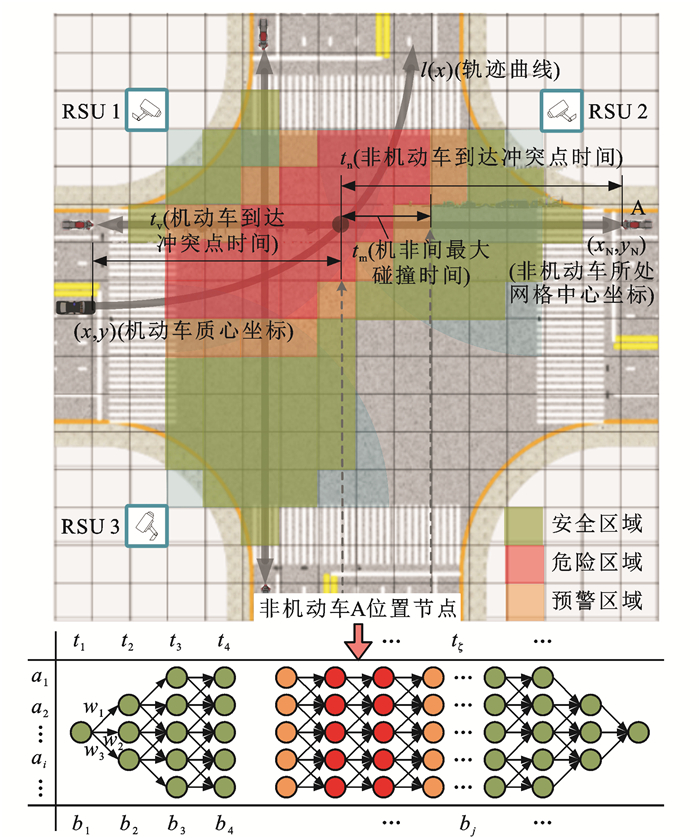
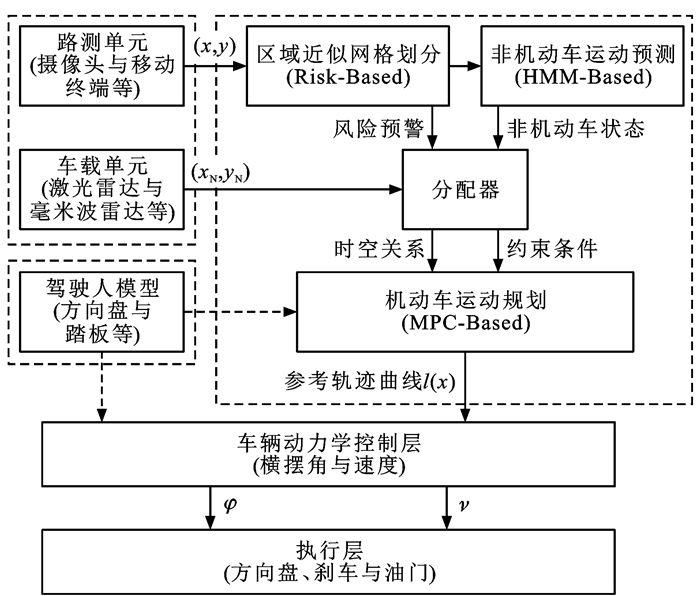
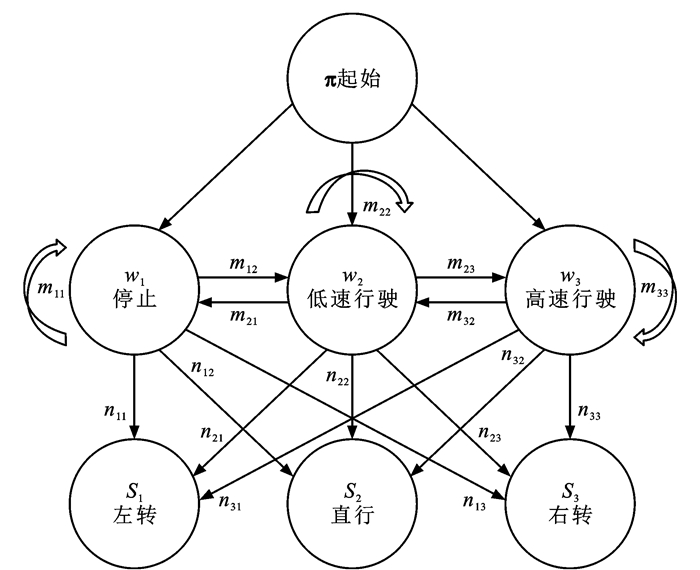
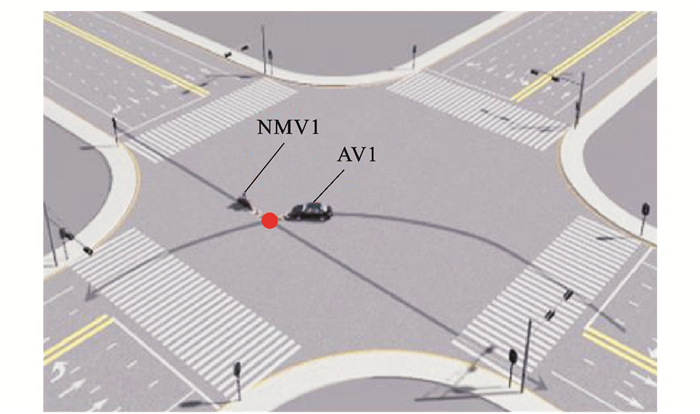
为了提高自动驾驶车辆在复杂机非混行交叉口行车安全性、舒适性和效率,提出了一种基于机非冲突近似网格风险评估的自动驾驶左转运动规划模型,并进行模型泛化;设定静态离散序列交叉口网格区域的划分规则,根据多状态通行行为概率转换关系,预测非机动车在细分网格中的运动状态,并动态评估机非冲突区域的风险等级;在此基础上,采用模型预测方法设计自动驾驶车辆的横纵向控制算法,通过自适应调节航向与速度实现跟踪期望轨迹并同步规避网格冲突区域;结合车辆动力学与外部交互环境等约束条件,开发交叉口四相位信号控制交通仿真平台,采用模型在环测试的方式,从效率优度、舒适性优度、实际规划路径与参考路径的偏移量等方面,验证了对左转机非冲突区域运动规划的有效性。研究结果表明:所提出模型能够有效动态提取和预测网格风险信息,确保自动驾驶车辆与驶入交叉口非机动车的安全交互、高效通行与驾驶舒适性,其规划路径的偏移量与同类算法相比最大可降低17.1%,通行效率最大可提高26.6%,舒适性优度最大可提高39.3%,实际路径跟踪表现出高效通过交叉口机非冲突区域和规划路径占用空间低的明显优势。
更多>
2022, 22(3): 89-103.
doi:
10.19818/j.cnki.1671-1637.2022.03.007
摘要
(
3403
)
HTML
(
950
)
PDF (11282KB)
(
256
)
引用
(
)
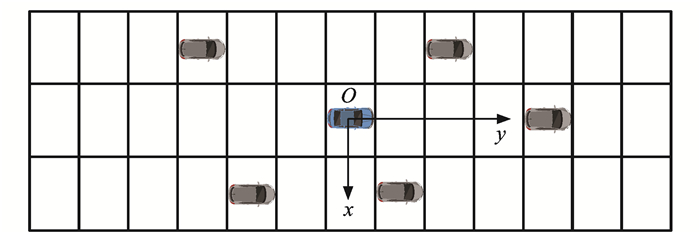
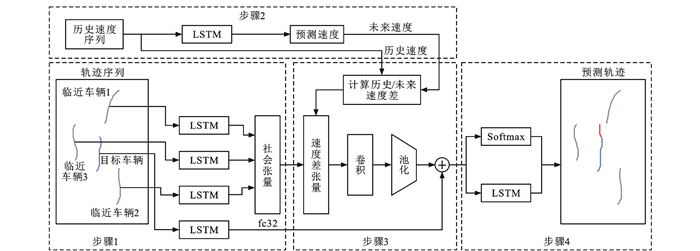
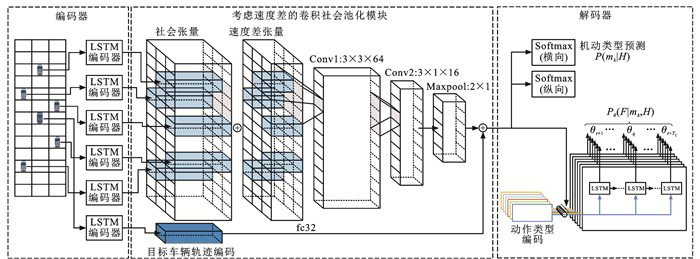
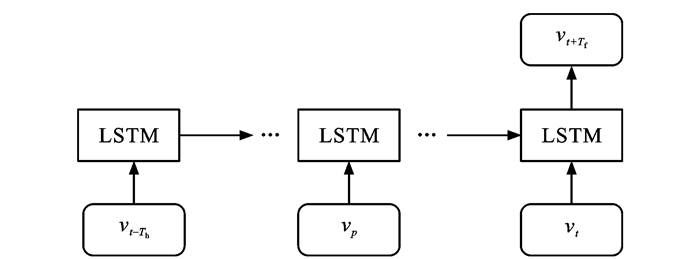
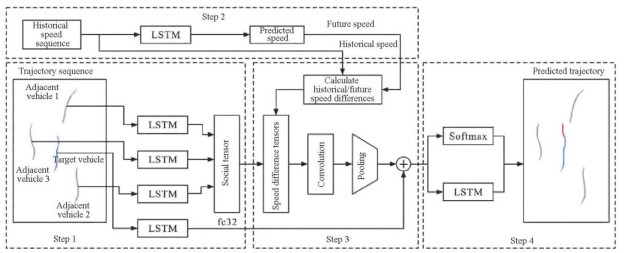
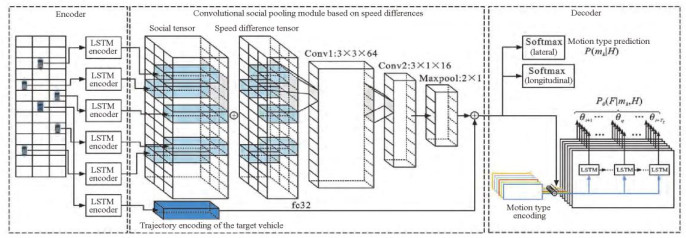
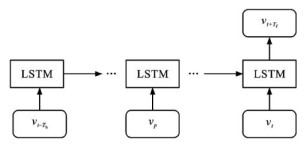
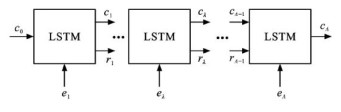
面向群体行驶场景的时空信息融合车辆轨迹预测…
李立
,
平振东
,
朱进玉
,
徐志刚
,
汪贵平
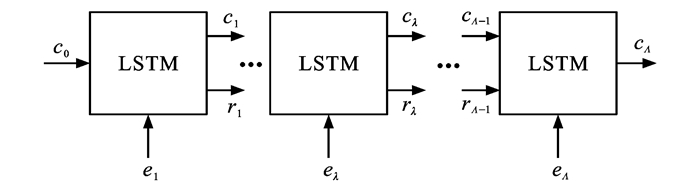
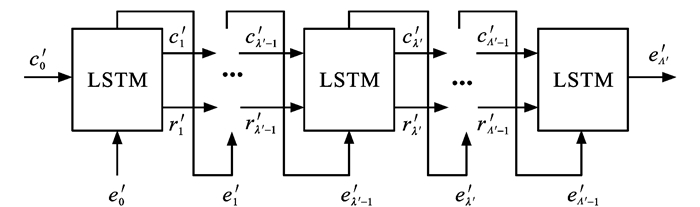
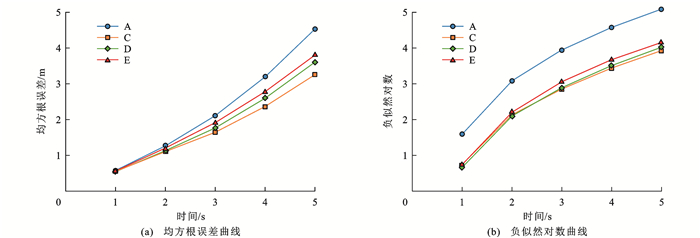
摘要:
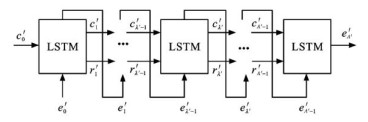
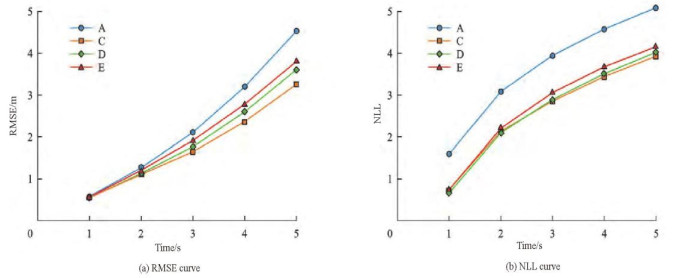
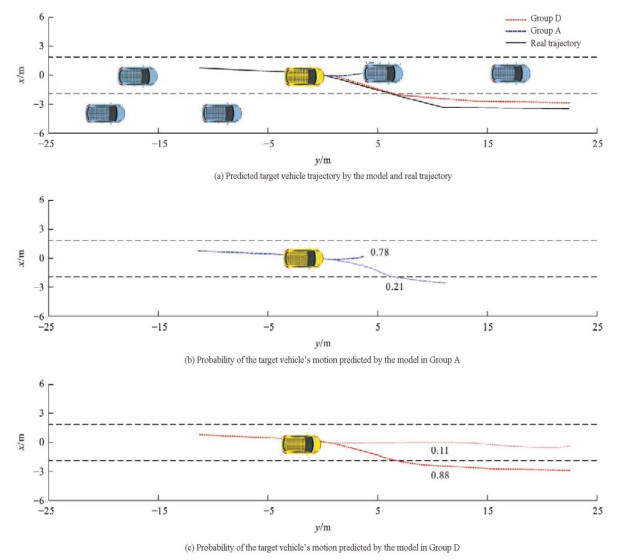
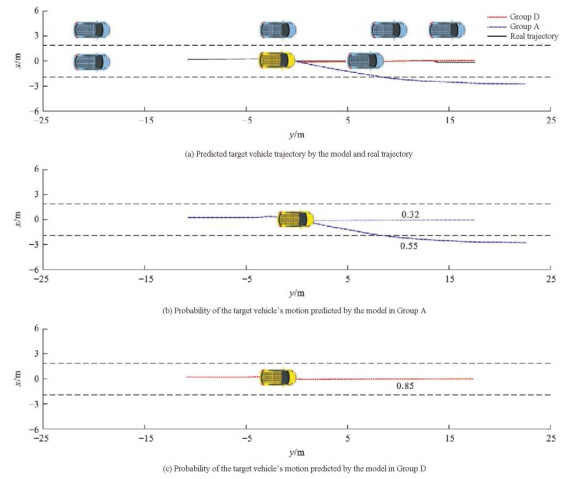
将车辆间时空交互信息融入卷积社会池化网络中,提出了一种面向群体行驶场景的有人驾驶车辆轨迹预测模型;使用长短时记忆(LSTM)网络预测群体车辆速度,基于此预测值计算群体车辆间的速度差;构造LSTM编码器捕捉群体车辆行驶轨迹的时间序列特征,设计卷积社会池化网络提取群体车辆间的空间依赖关系,使用LSTM解码器预测未来车辆各种动作的出现概率和相应轨迹,将具有最高出现概率的动作及其轨迹作为最终轨迹预测结果;使用真实轨迹数据集对所构建模型进行了参数标定和性能验证,测试了不同轨迹编解码与速度预测方法对模型性能的影响,确定了最优模型结构。计算结果表明:相较于历史速度,使用预测速度计算速度差作为模型输入可将均方根误差(RMSE)降低19.45%;相较于门控循环神经网络,使用LSTM进行速度预测可将RMSE降低4.91%;相较于原始卷积社会池化网络,所提出模型的轨迹预测误差在RMSE与负似然对数2个指标上分别降低了20.32%和21.04%,明显优于其他卷积社会池化网络变体;所提出模型与原始卷积社会池化网络计算耗时差距约3 ms,能够满足实时应用要求。
更多>
2022, 22(3): 104-114.
doi:
10.19818/j.cnki.1671-1637.2022.03.008
摘要
(
3073
)
HTML
(
1216
)
PDF (8168KB)
(
330
)
引用
(
)
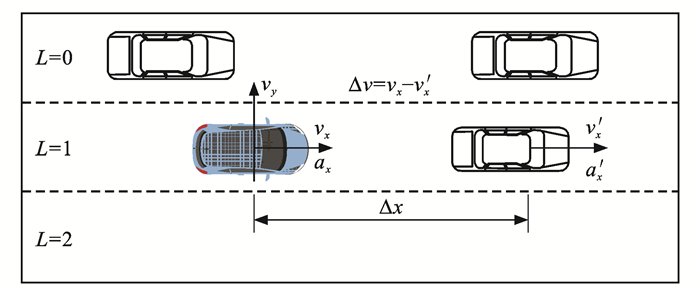
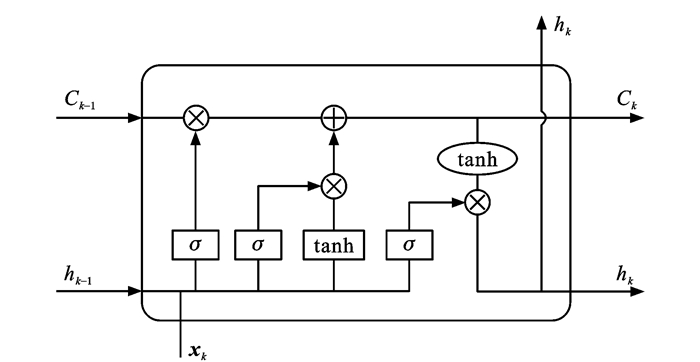
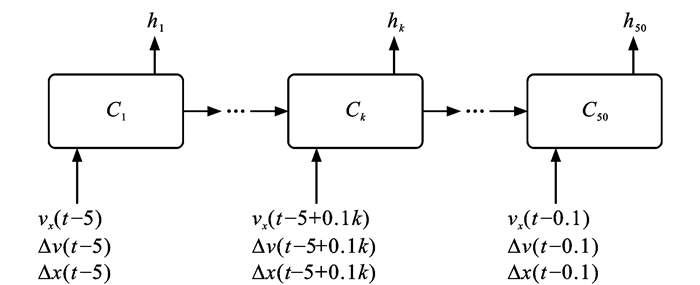
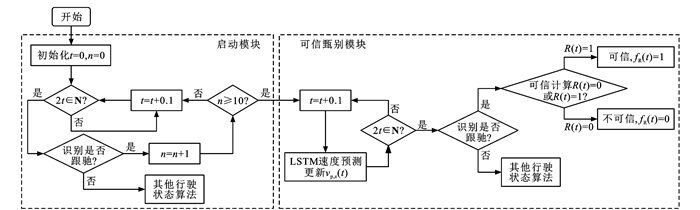
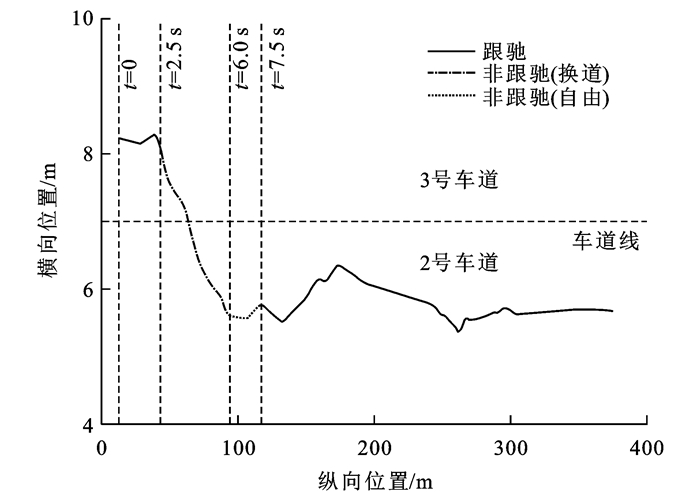
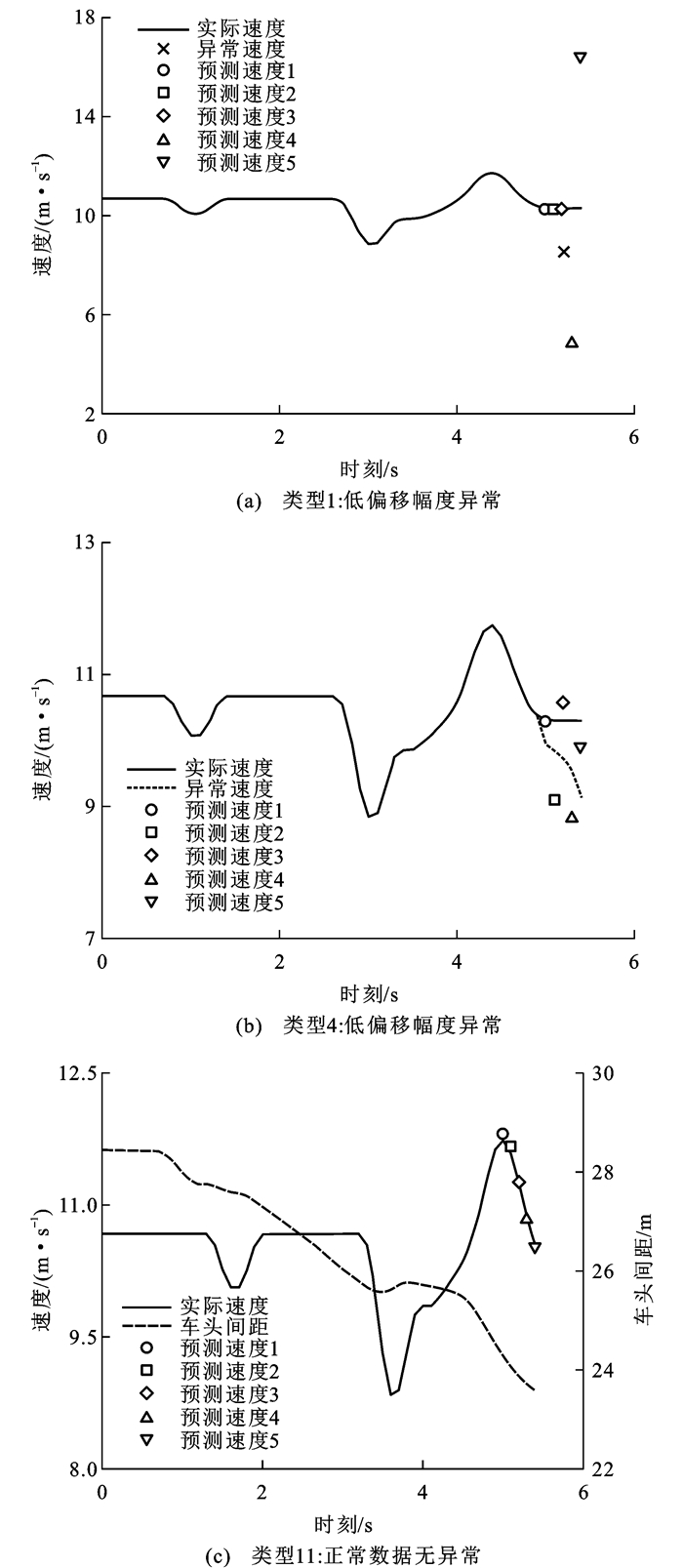
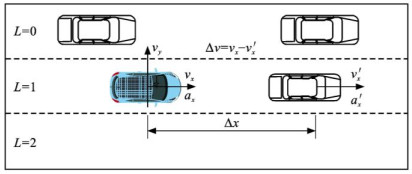
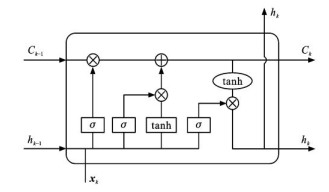
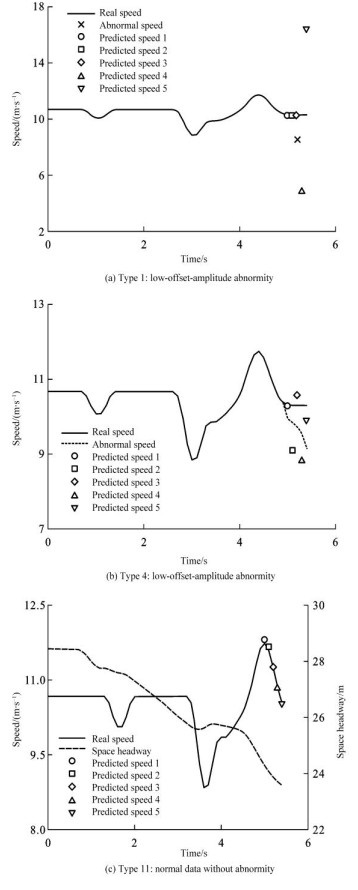
基于SVM-LSTM的车辆跟驰行为识别与信息可信甄别
史宇辰
,
晏松
,
姚丹亚
,
张毅
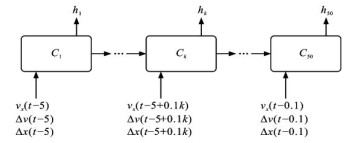
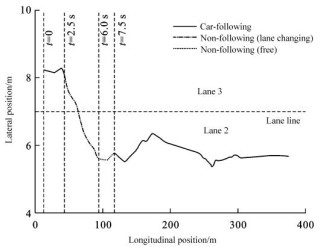
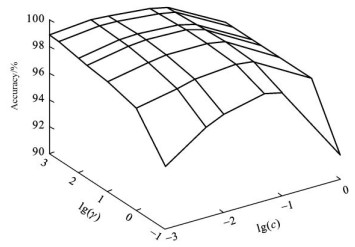
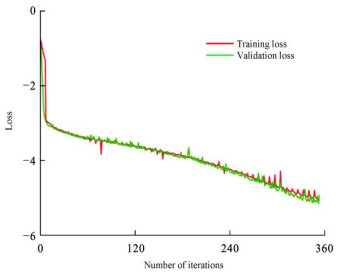
摘要:
为利用智能车路协同系统内实时交互信息有效提升交通系统的安全性,提出了基于交通业务特征的交通信息可信甄别方法;重点构建了基于支持向量机(SVM)-长短时记忆(LSTM)神经网络的车辆跟驰行为识别与信息可信甄别模型,包括基于SVM的车辆跟驰行为识别模型和基于LSTM神经网络的车辆跟驰速度预测模型;设定了表征车辆行驶状态的特征向量,基于SVM的车辆跟驰行为识别模型将车辆行驶状态分为跟驰与非跟驰;对于跟驰车辆,基于LSTM神经网络的车辆跟驰速度预测模型根据其历史数据进行速度预测;SVM-LSTM信息可信甄别模型通过检验跟驰车辆的预测速度与其实际速度的差是否在合理范围来判断车辆数据的可信性,实现信息的可信甄别;采用公开数据集对提出的模型进行了训练与测试,并构建了不同异常类型和异常幅度的多个异常测试数据集,对基于SVM-LSTM神经网络的车辆跟驰行为识别与信息可信甄别模型进行了验证。研究结果表明:基于SVM的车辆跟驰行为识别模型对车辆行驶行为识别的准确率达到了99%,基于LSTM神经网络的车辆跟驰速度预测模型的跟驰速度预测精度达到了cm·s
-1
数量级;基于SVM-LSTM神经网络的车辆跟驰行为识别与信息可信甄别模型在正常数据测试集与多个异常数据测试集上的甄别正确率达到了97%。由此可见,提出的方法可用于路侧设备(RSUs)对车载单元(OBUs)实时信息和车载单元间实时信息的可信甄别。
更多>
2022, 22(3): 115-125.
doi:
10.19818/j.cnki.1671-1637.2022.03.009
摘要
(
2550
)
HTML
(
799
)
PDF (3450KB)
(
226
)
引用
(
)
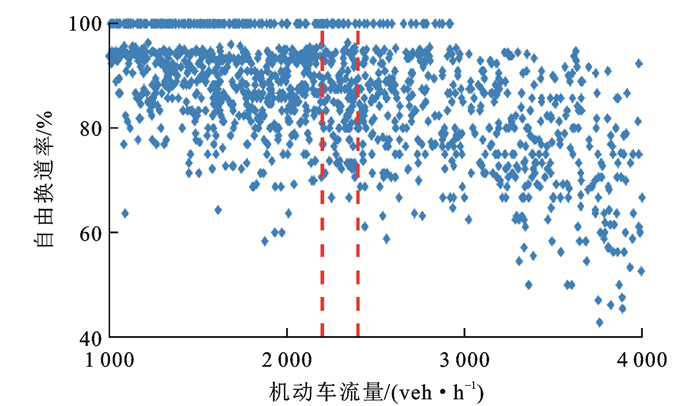
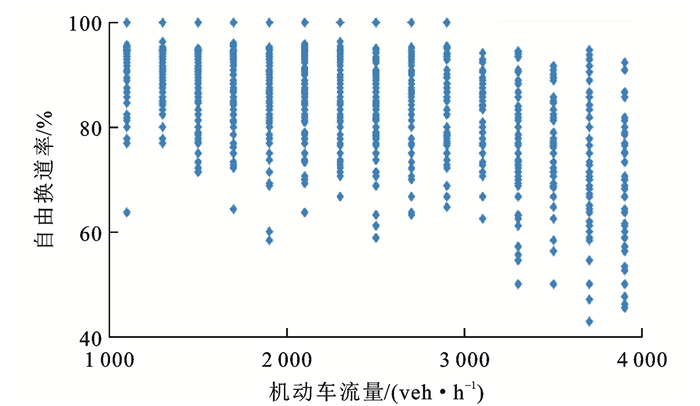
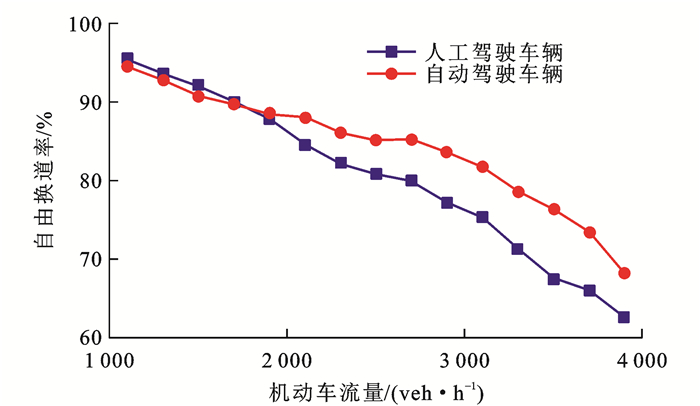
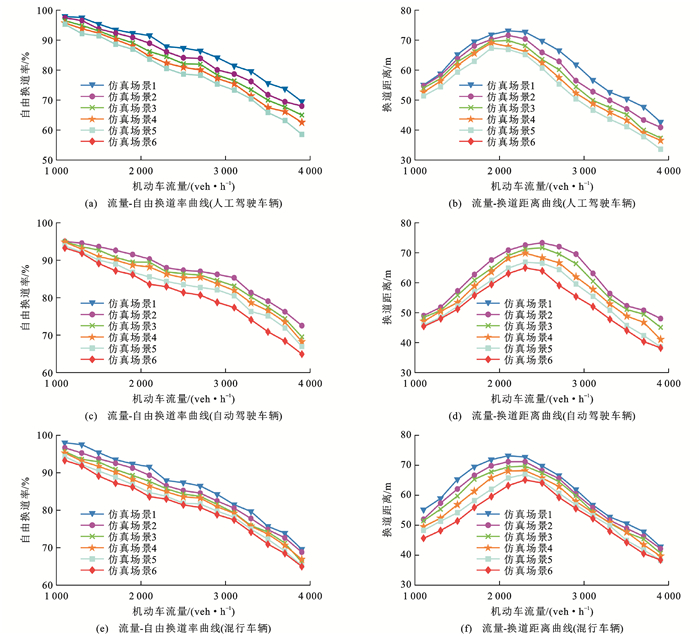
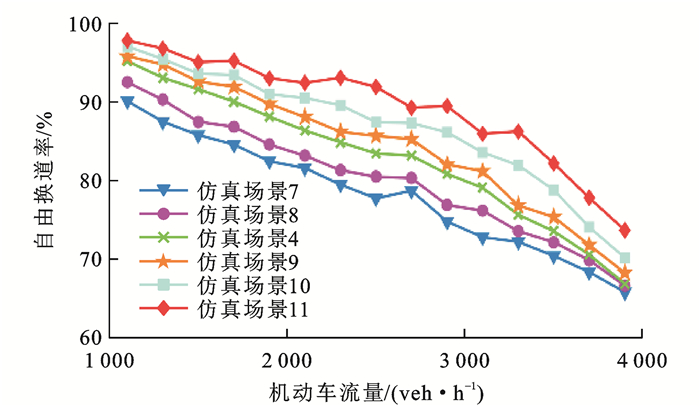
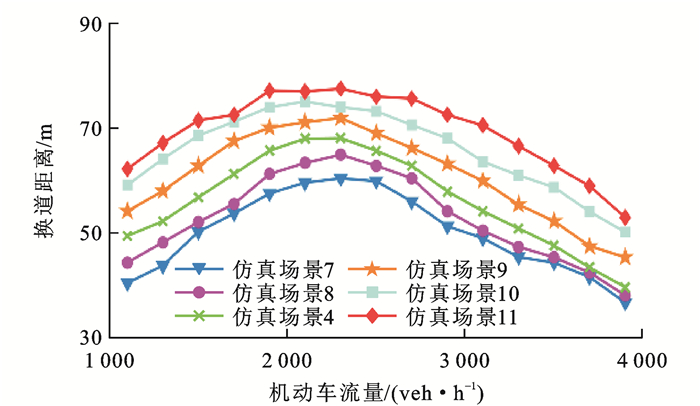
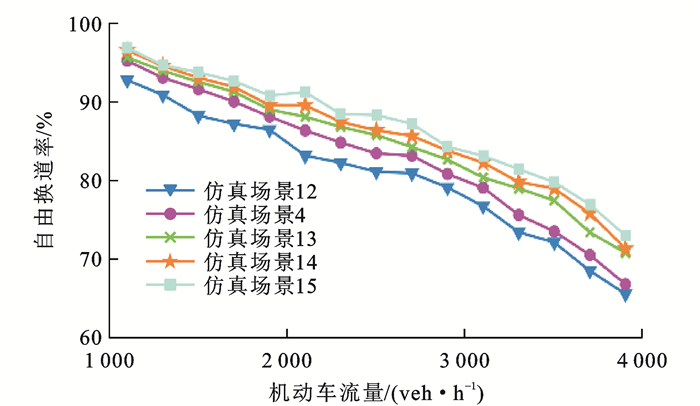
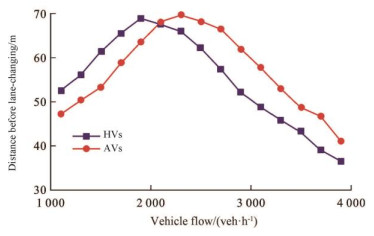
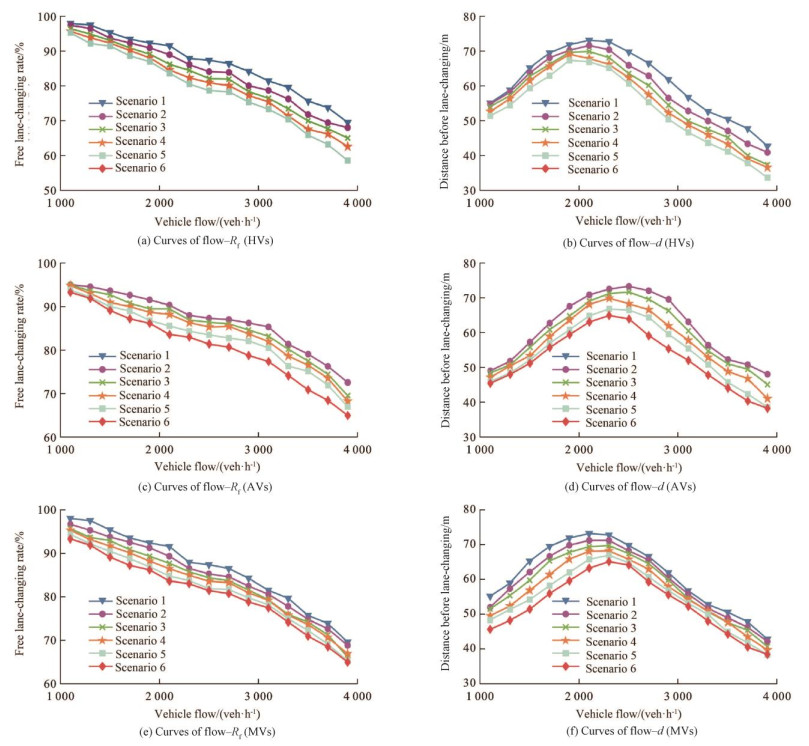
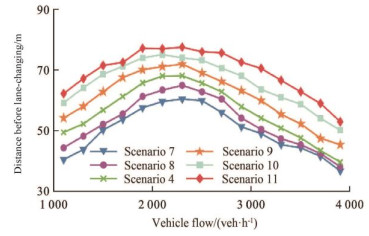
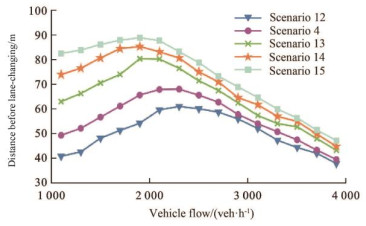
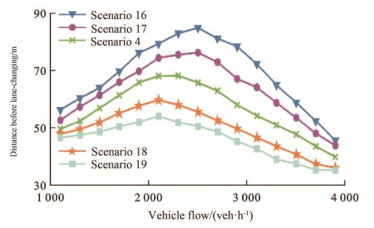
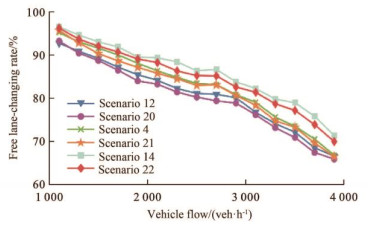
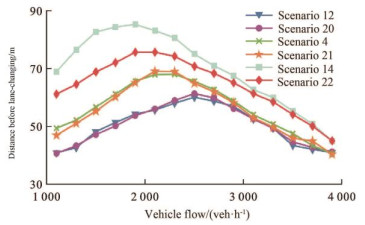
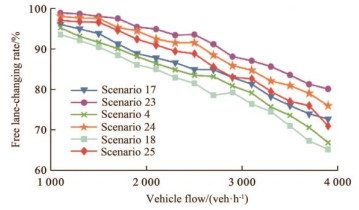
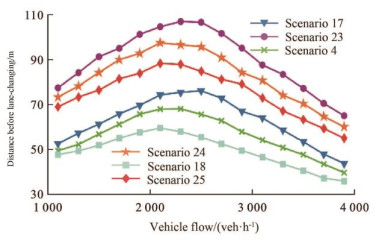
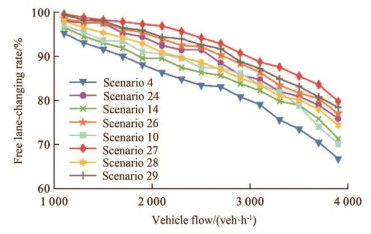
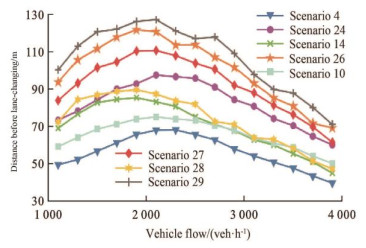
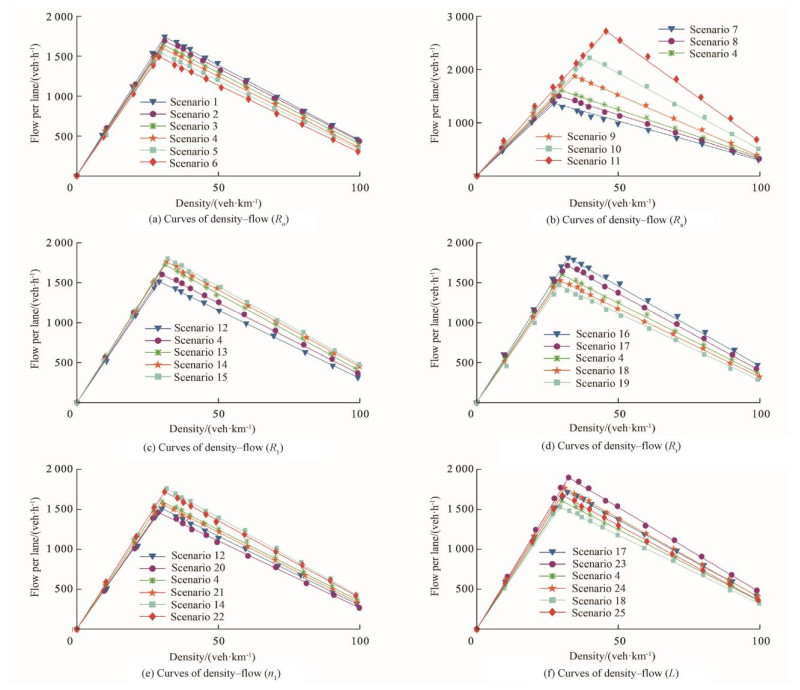
车路协同环境城市快速路分流区通行能力提升策略
李锐
,
冉斌
,
曲栩
摘要:
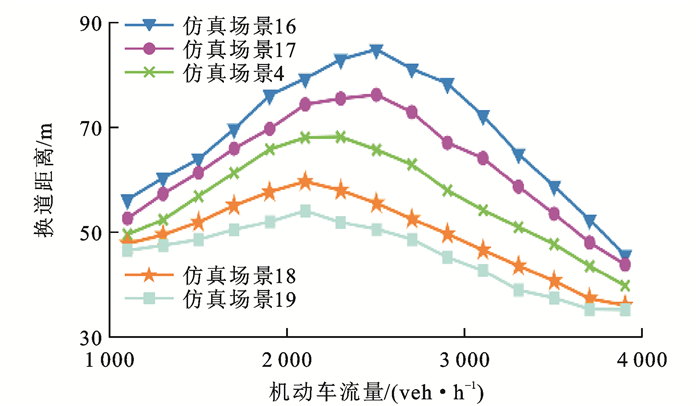
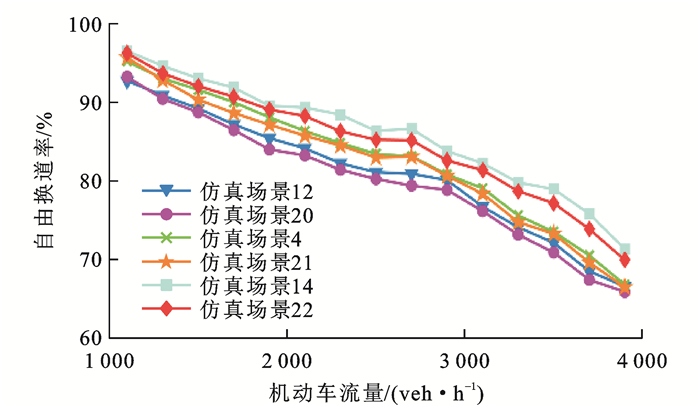
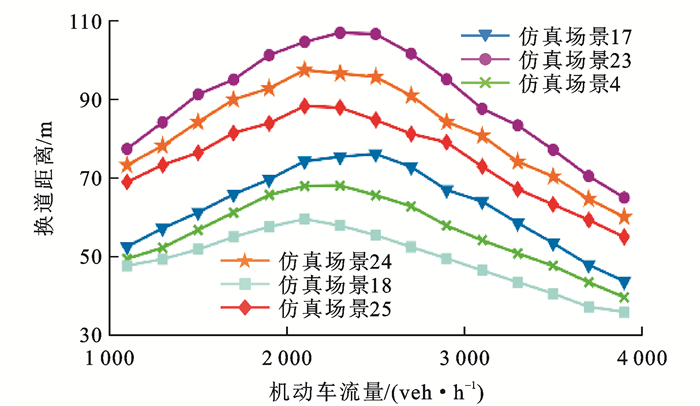
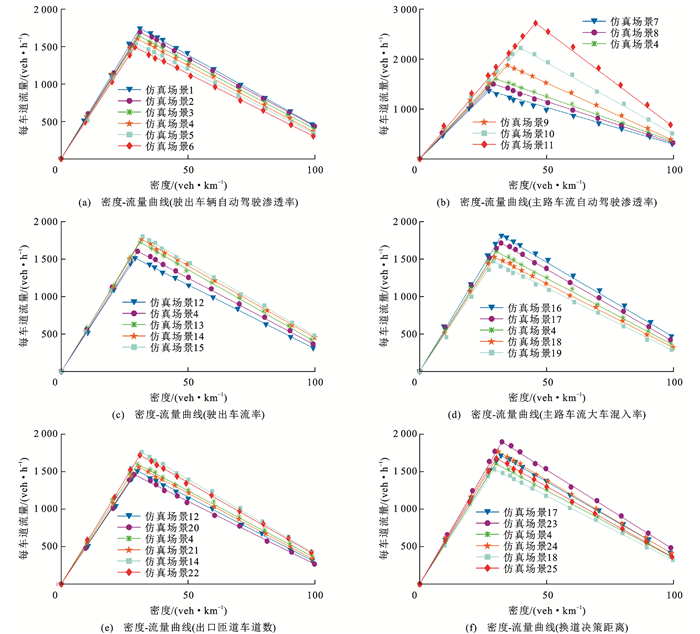
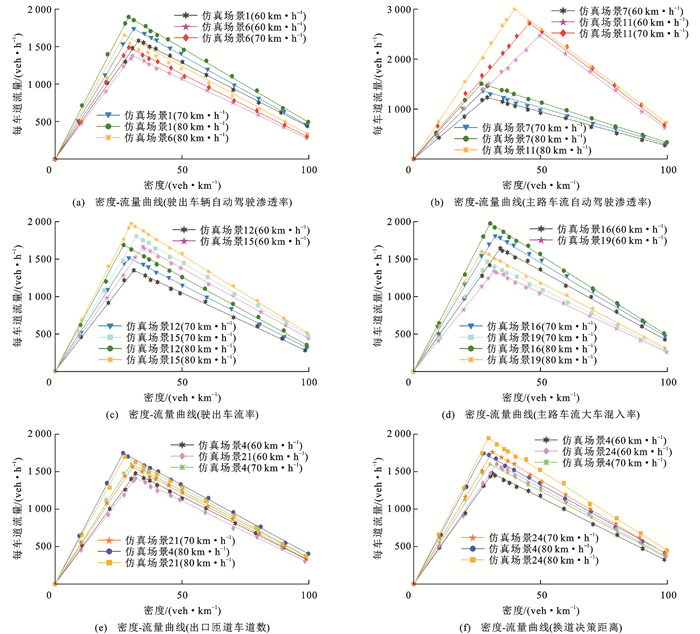
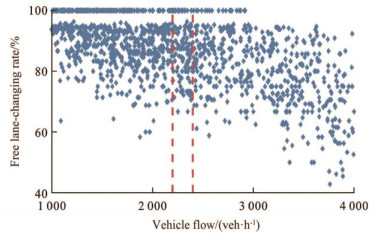
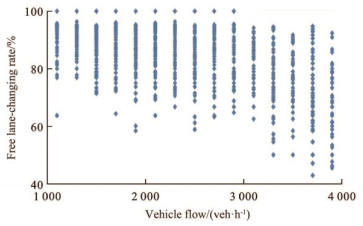
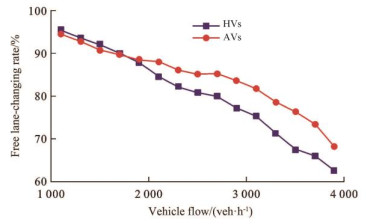
根据车路协同环境城市快速路分流区不同车型的自动、人工驾驶混合车流特征,引入动态加速度、可变换道概率改进元胞自动机模型车流运行规则;设计了考虑主路自动驾驶渗透率、大型车混入率、驶出自动驾驶渗透率、驶出车流率、出口匝道车道数、换道决策点距离等因素耦合作用的分流区换道仿真试验;对比分析了多因素耦合作用下驶出车辆自由换道率、平均换道距离等指标影响程度,研究了城市快速路分流区道路通行能力变化规律;提出了基于可变换道决策点距离的分流区道路混合车流通行能力提升策略。研究结果表明:分流区驶出车辆自由换道率越高,道路通行能力越大;主路车流自动驾驶渗透率对通行能力的影响最为显著,自动驾驶环境可达到人工驾驶环境道路通行能力的2倍;出口匝道车道数对通行能力的影响不显著,2条出口匝道比1条出口匝道的通行能力提升约3%;换道决策点距离对通行能力的影响较为显著,车辆换道决策点距离从100 m增加到150 m时,分流区道路通行能力可提高9.6%~10.6%。可见,可借助移动式交通标志提前引导车辆换道决策,显著提高分流区道路通行能力。
更多>
2022, 22(3): 126-138.
doi:
10.19818/j.cnki.1671-1637.2022.03.010
摘要
(
2540
)
HTML
(
702
)
PDF (16790KB)
(
258
)
引用
(
)
混行环境下网联信号交叉口车路协同控制方法
王润民
,
张心睿
,
赵祥模
,
吴霞
,
凡海金
摘要:
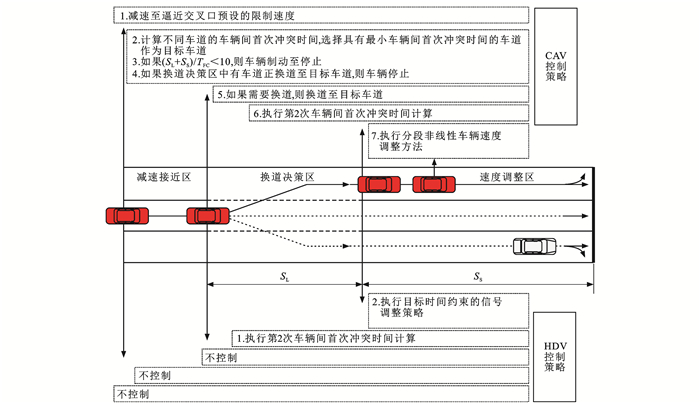
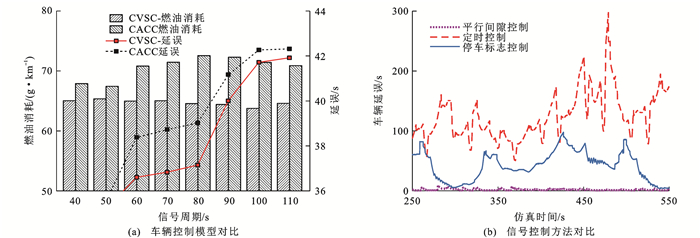
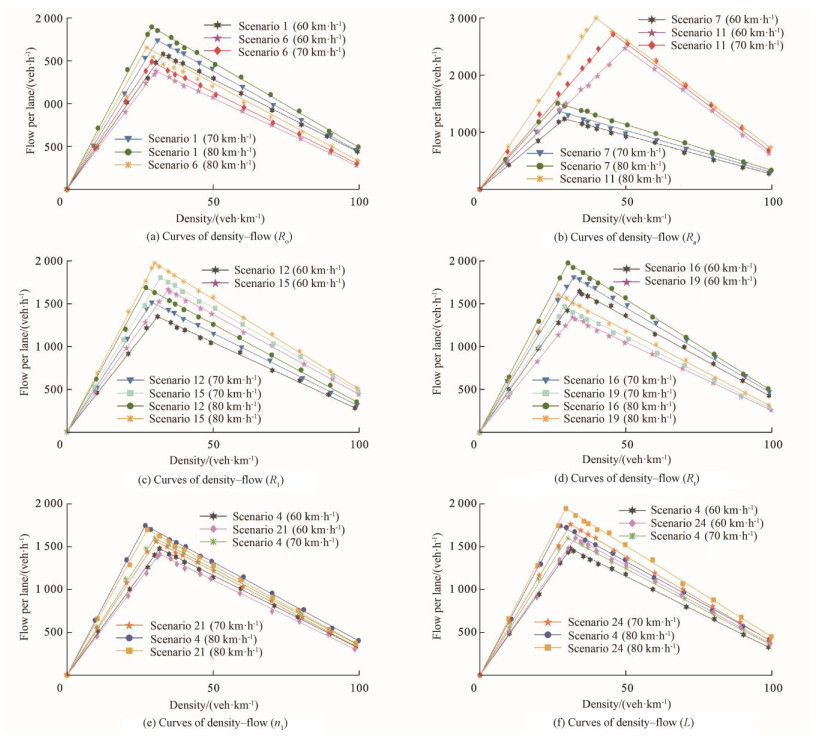
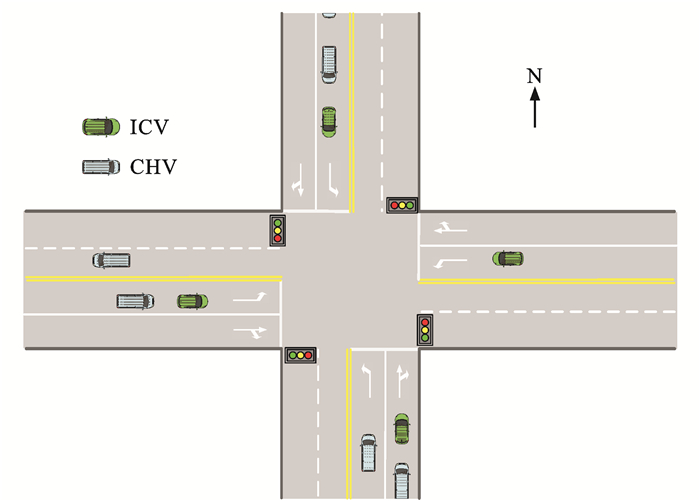
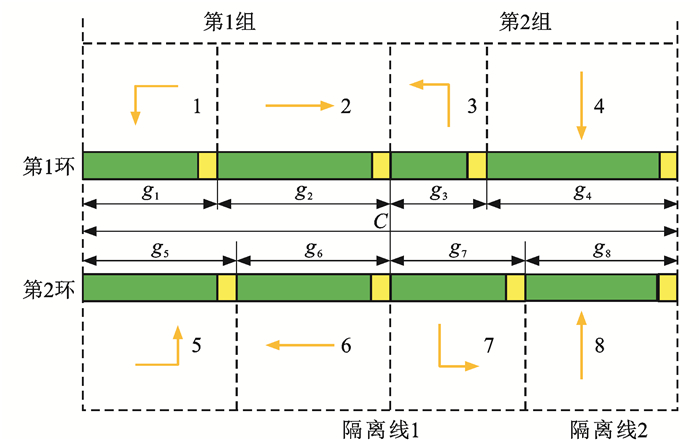
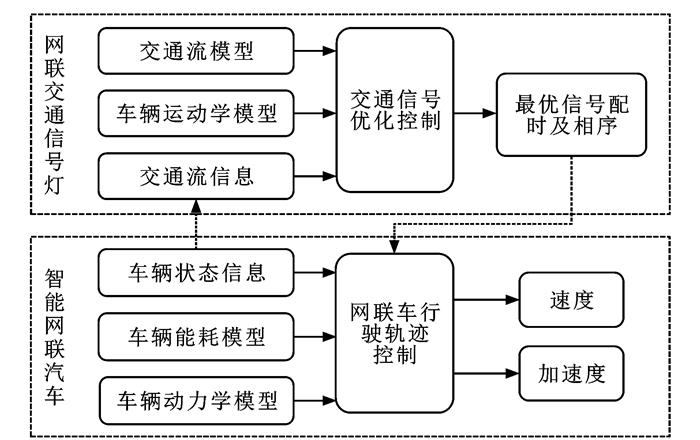
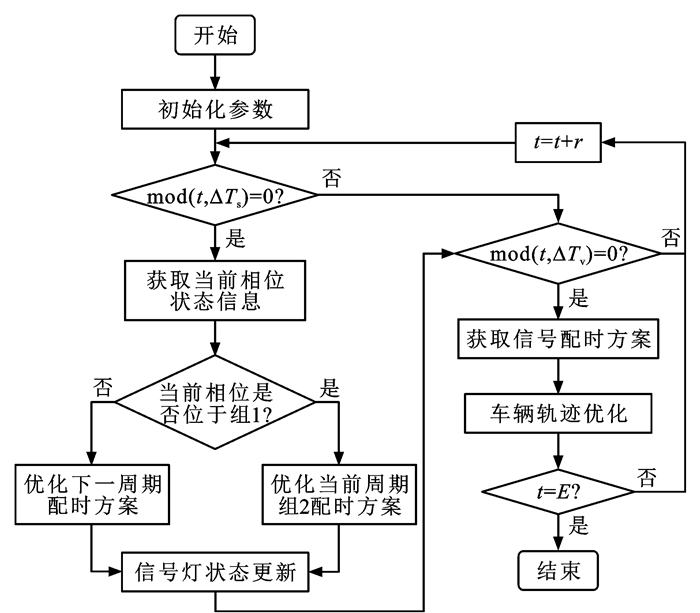
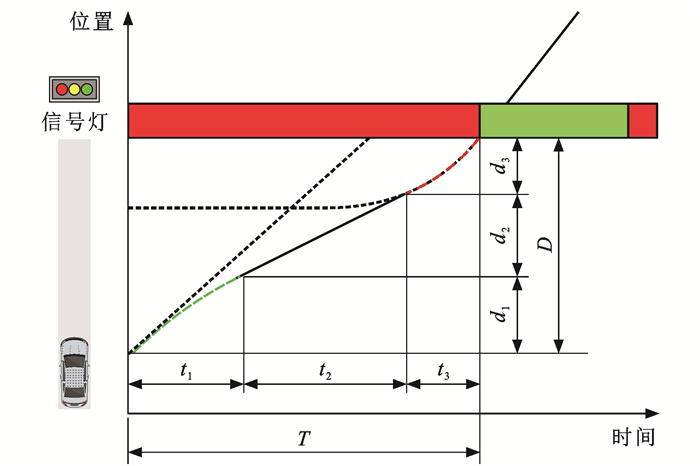
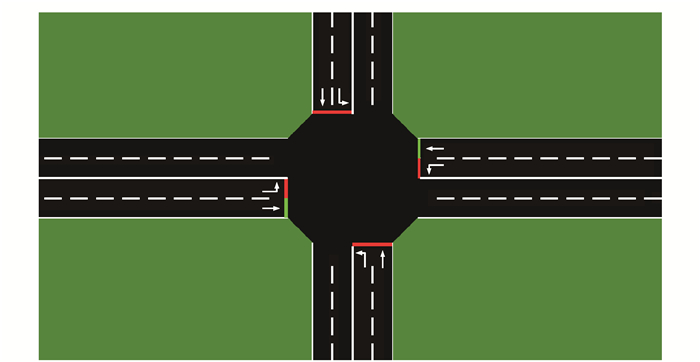
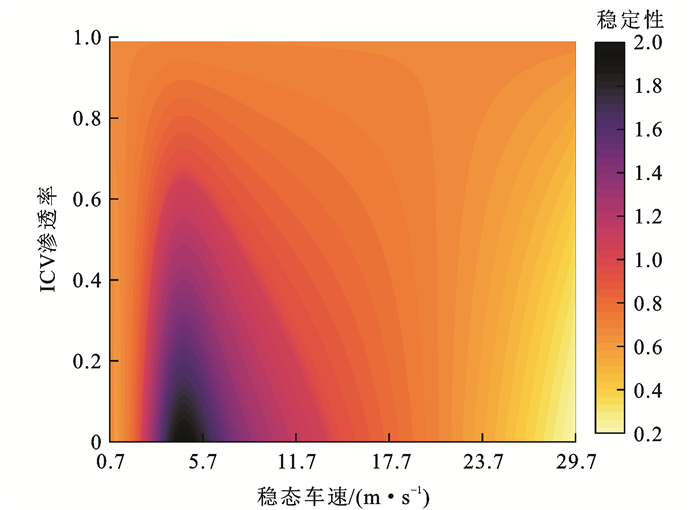
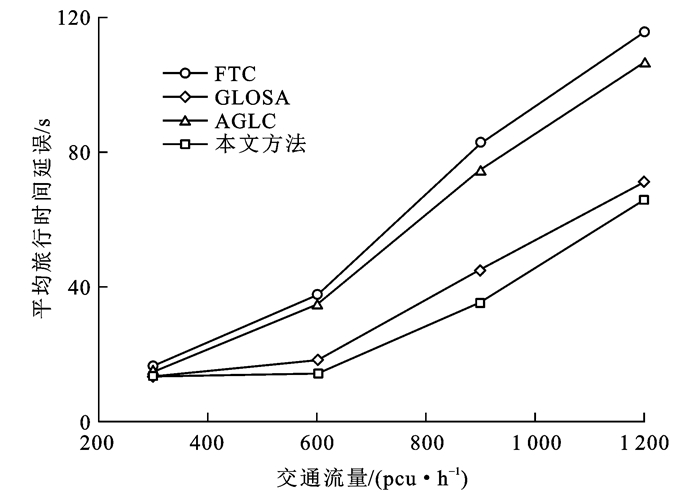
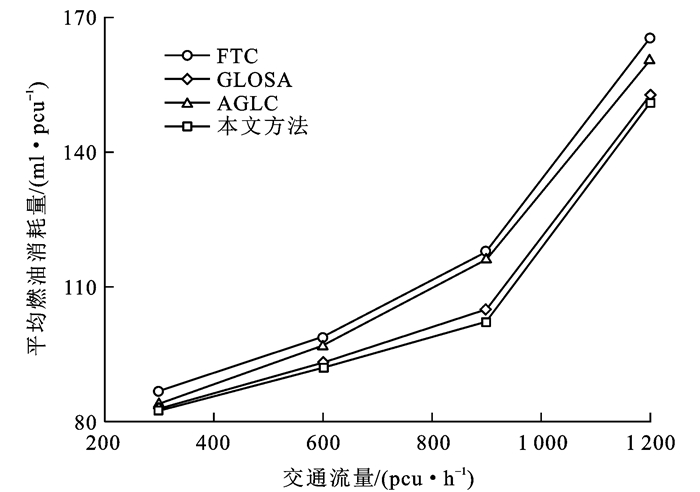
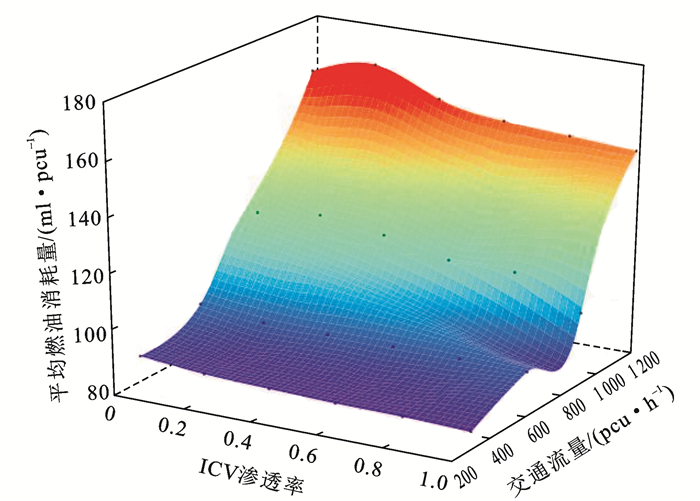
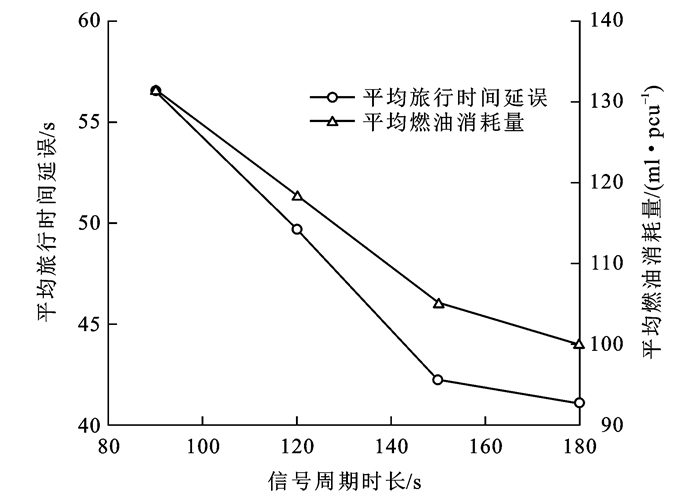
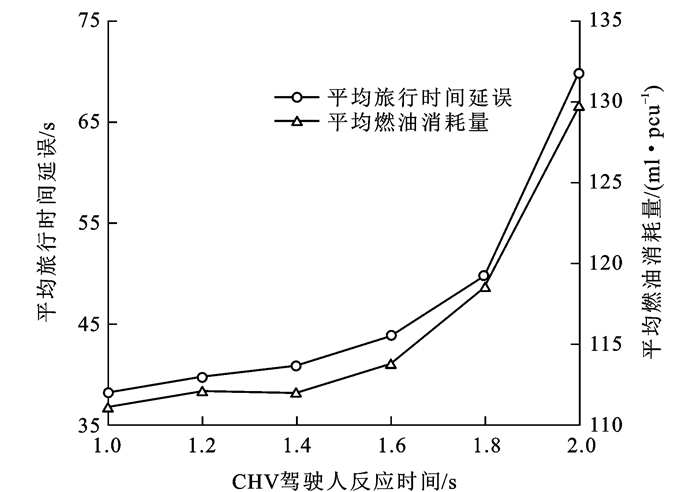
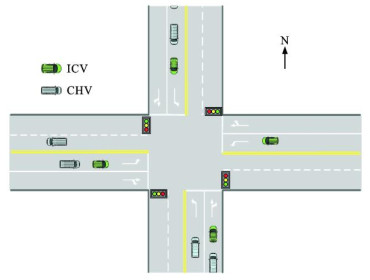
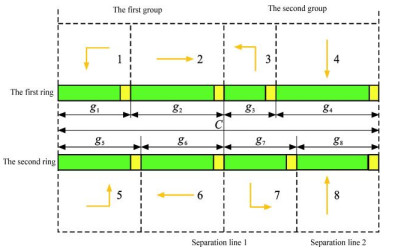
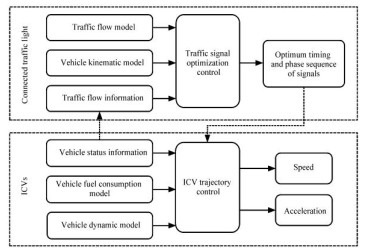
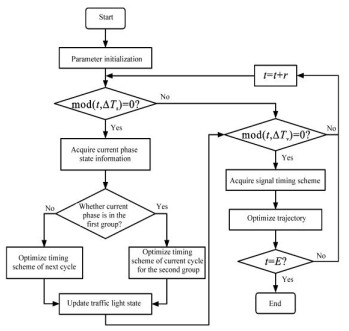
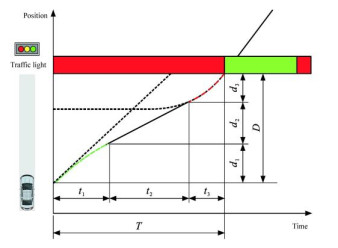
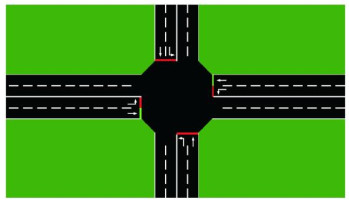
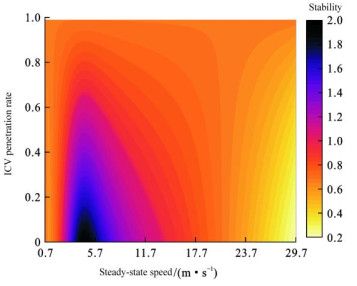
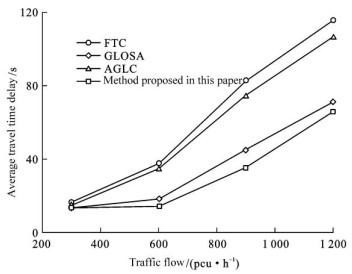
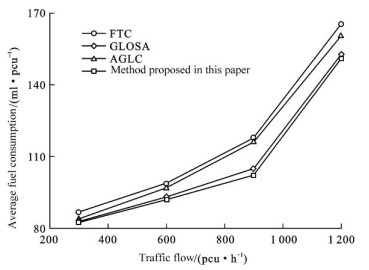
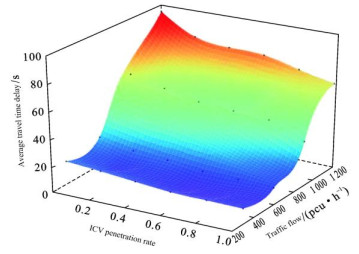
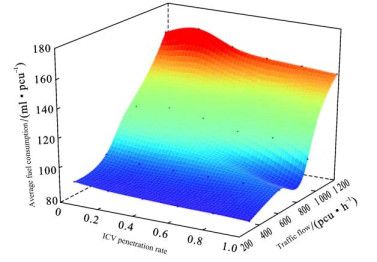
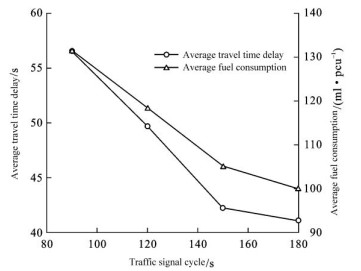
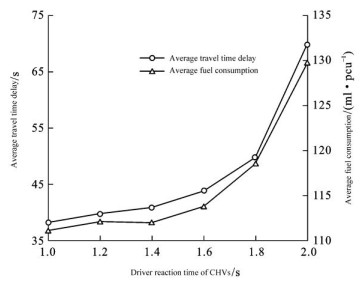
为了提高网联信号交叉口车路协同控制对真实交通环境的适应性,以智能网联汽车与网联人工驾驶汽车混行的典型交通应用场景为研究对象,通过构建八相位网联信号交叉口,研究了混行环境下的交通信号和网联车辆轨迹车路协同优化控制方法;在对场景中的网联车辆运动学特性和跟驰行为进行建模的基础上,构建了一种混行车辆编队方法;基于混行车队模型、安全约束与燃油消耗模型,建立了基于滚动优化的交通信号-车辆轨迹协同优化控制方法;基于异步分层优化思路,将该协同控制问题分解为上层交通信号优化与下层车辆轨迹优化两方面,以交叉口车辆行驶延误时间和燃油消耗量为优化目标,利用遗传算法和“三段式”轨迹优化法分别对交通信号优化问题与车辆轨迹优化问题进行求解;对不同稳态车速与智能网联汽车渗透率下构建的混行交通流的稳定性进行了验证,并通过仿真测试分析了所提出的协同优化控制方法的控制效能与关键参数对控制效能的影响。分析结果表明:在不同交通流量与智能网联汽车渗透率下,提出的控制方法均可有效提升交叉口通行效率与燃油经济性;在完全渗透环境下,较固定配时交通信号控制方法最高可分别提升57.3%和13.3%;随着智能网联汽车渗透率的增加,其控制效能不断提高,较无渗透条件最高可分别提升42.0%和14.2%;即使智能网联汽车渗透率仅达到20%,较无渗透条件也可以在交通效率方面实现20.4%的显著改善;较长的交通信号周期与较短的网联人工驾驶汽车驾驶人反应时间有助于协同控制效能的提升。
更多>
2022, 22(3): 139-151.
doi:
10.19818/j.cnki.1671-1637.2022.03.011
摘要
(
3785
)
HTML
(
1078
)
PDF (5621KB)
(
396
)
引用
(
)
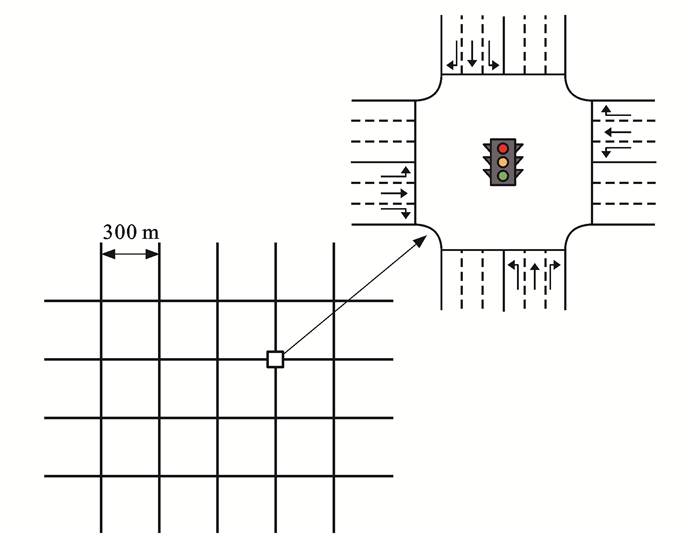
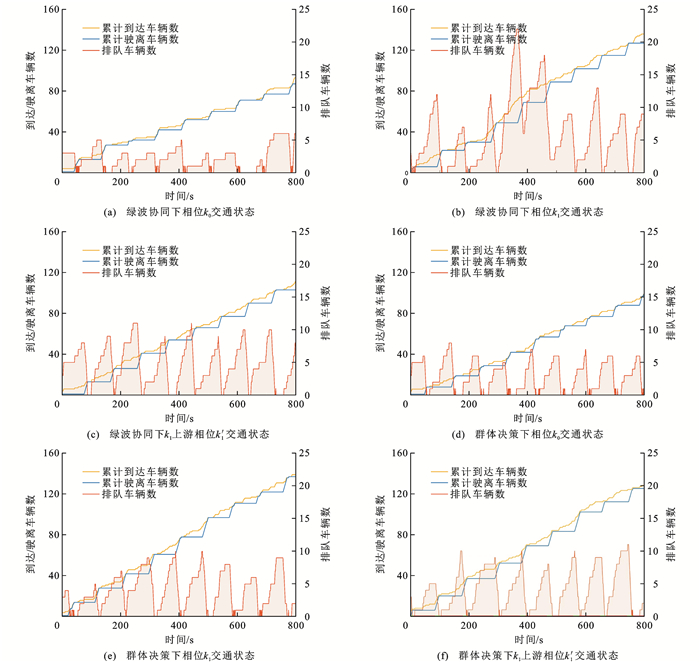
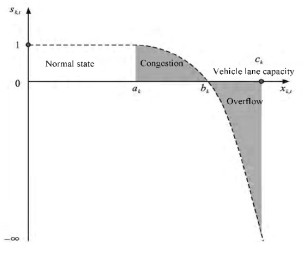
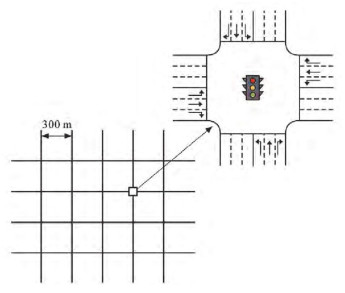
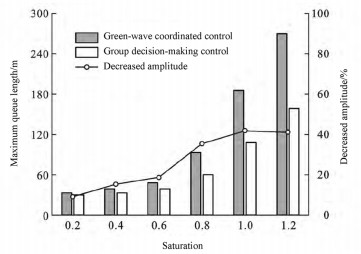
基于群体决策的多交叉口协同控制方法
马成元
,
朱际宸
,
赖金涛
,
张振
,
杨晓光
摘要:
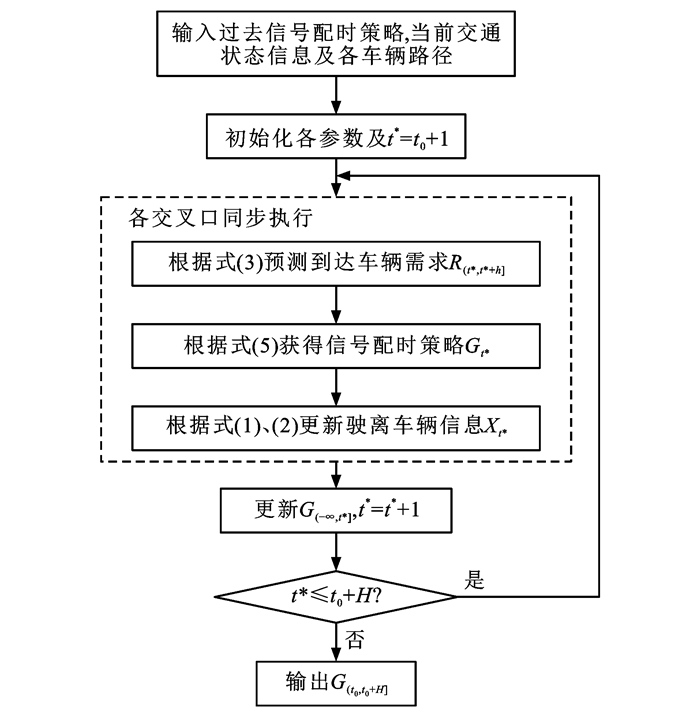
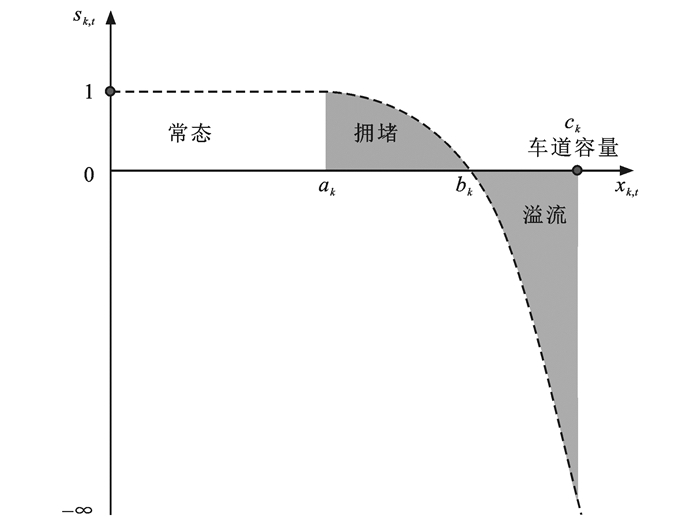
基于竞争-合作的群体决策机制,将单点信号优化构建为各相位的交叉口通行权的竞争过程,将多点协同构建为上下游相位之间的协作过程,提出了一种兼顾多交叉口协同效益和单交叉口控制优化的路网信号配时设计方法;利用车路协同环境下路网内车辆路径信息的可感知性,动态精准地量化解析上下游交通耦合关系;在此基础上建立了分层动态决策框架,在单层决策中剥离了上下游交叉口控制决策对本地决策的影响,解耦协同控制模型中路网交通状态和信号控制决策之间的复合关系;设计了基于交叉口内各交通流向竞争力的分布式信号配时决策算法,并通过仿真试验平台比较了群体决策协同控制方法与传统协同控制方法的控制效果。研究结果表明: 相较于传统协同控制方法,群体决策协同控制方法可动态适应路网交通需求,在交通效率和稳定性上具有显著优势,在不同饱和度的交通需求水平下可降低车均延误15%以上;在路网交通饱和度较高的情况下, 群体决策协同控制方法延误降低幅度可达19.2%,控制优势更加明显;由于群体决策协同控制方法可在下游交叉口进口道车辆排队过长时减少上游车辆流出,可降低路网最大排队长度超40%,有效规避路网溢流风险;通过对群体决策协同控制模型的分布式求解,可实现单次决策过程计算时间小于0.01 s,具有应用于大规模复杂路网的实时信号配时决策的潜力。
更多>
2022, 22(3): 152-161.
doi:
10.19818/j.cnki.1671-1637.2022.03.012
摘要
(
2415
)
HTML
(
853
)
PDF (7974KB)
(
241
)
引用
(
)
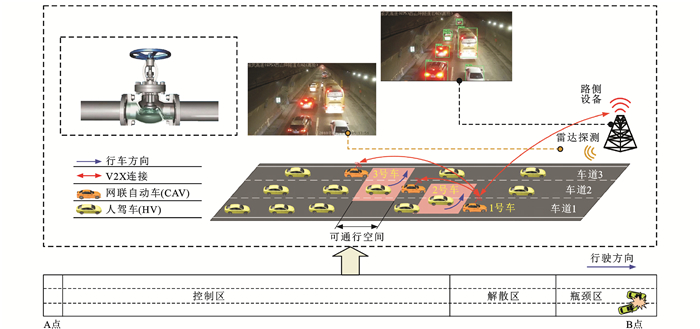
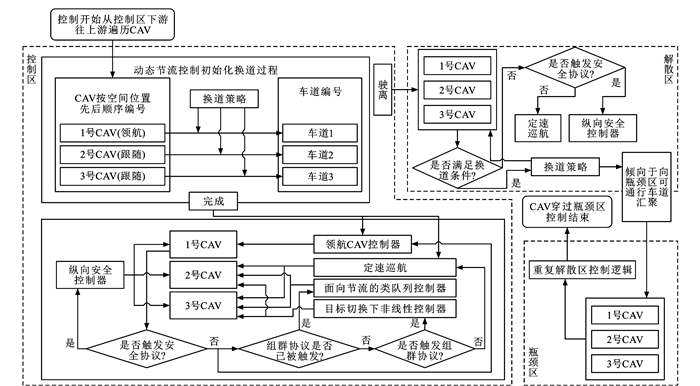
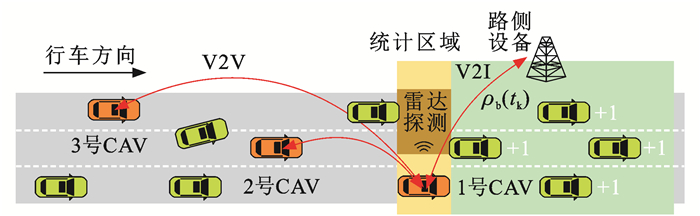
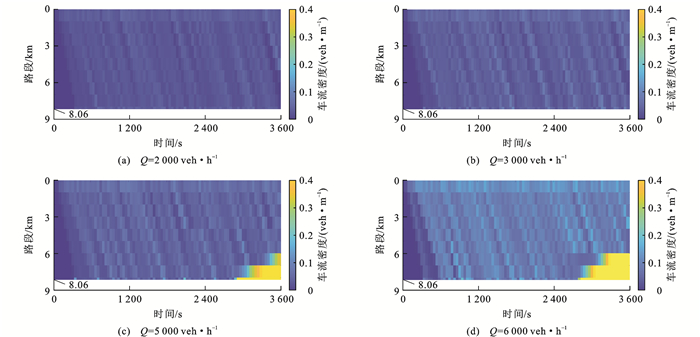
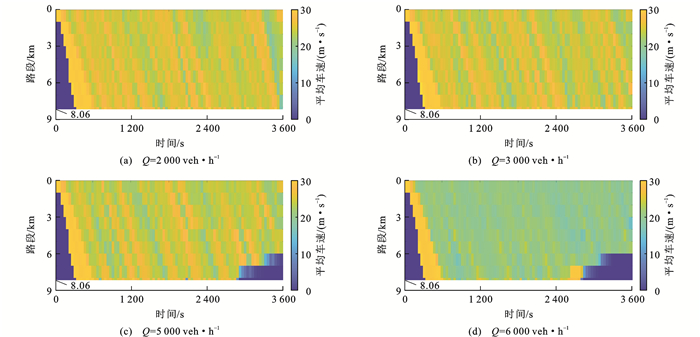
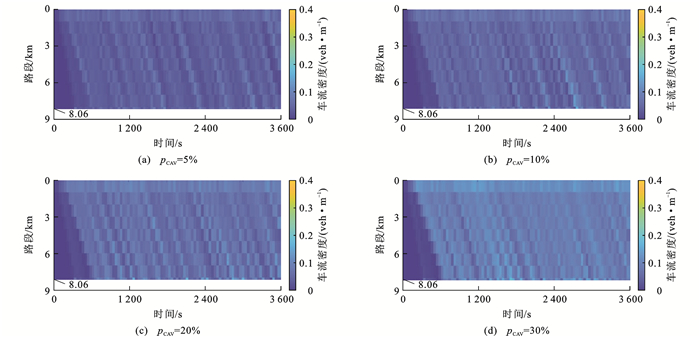
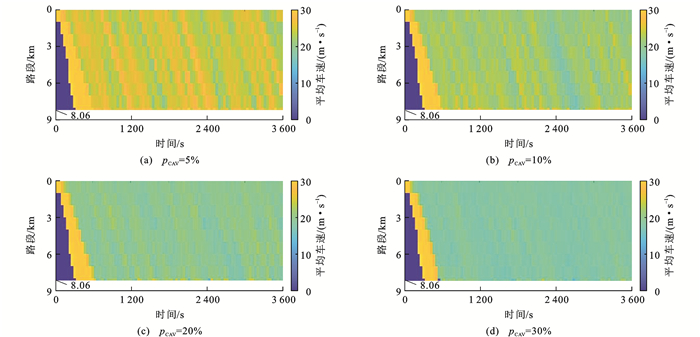
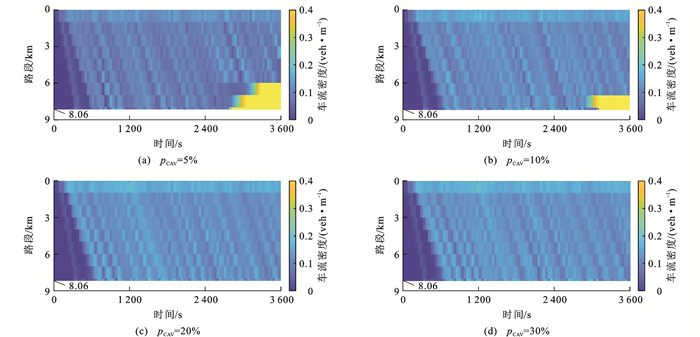
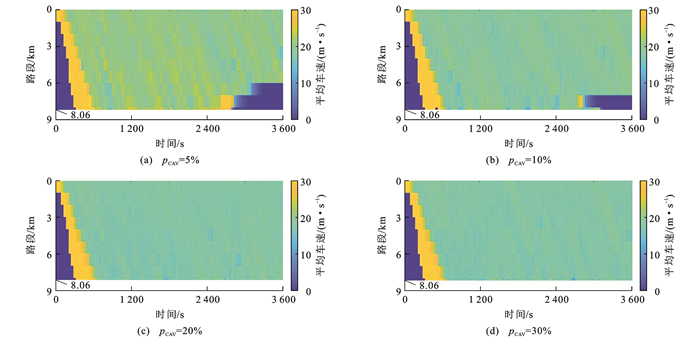
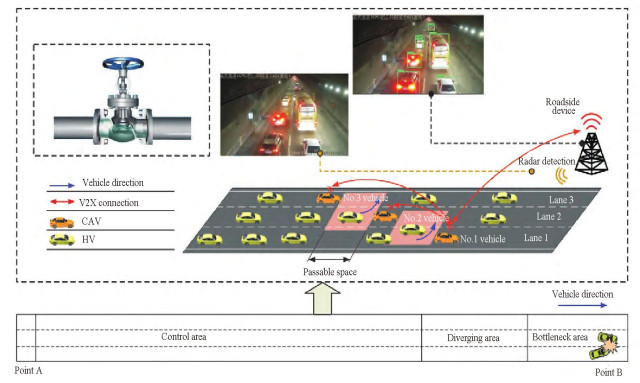
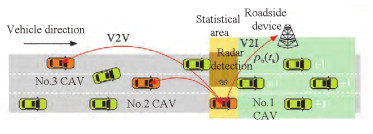
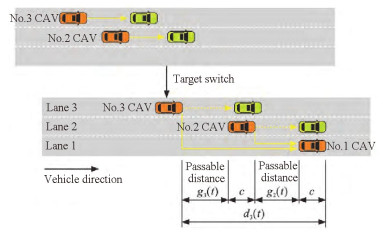
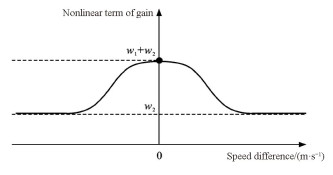
面向快速路交通瓶颈的混合交通群体节流控制策略
赵杭
,
赵敏
,
孙棣华
,
杜成
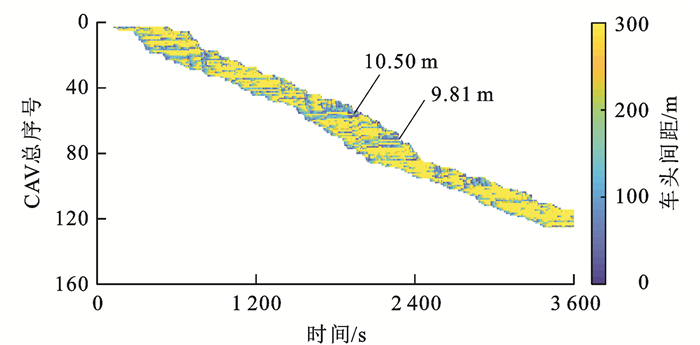
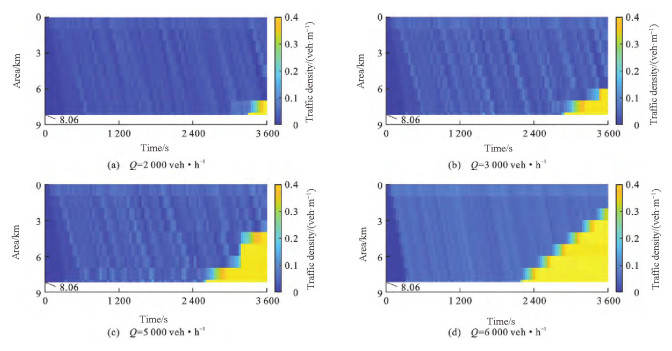
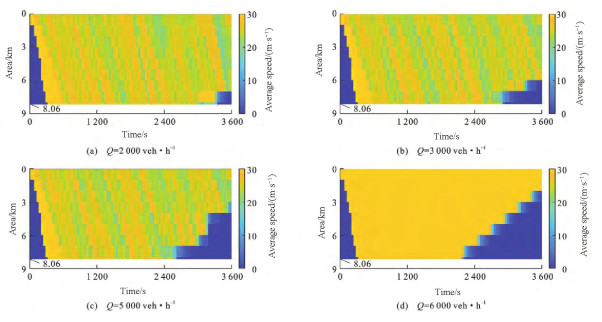
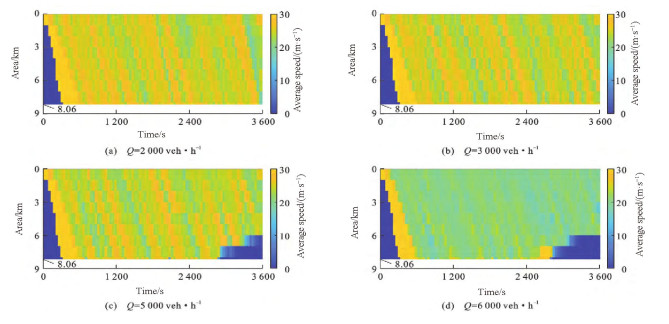
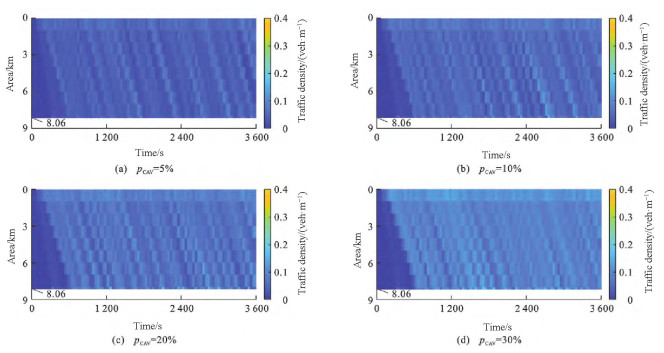
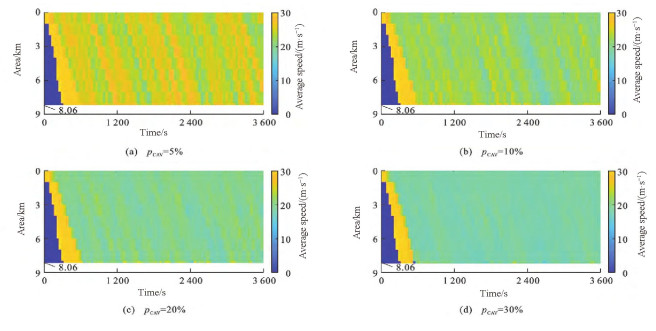
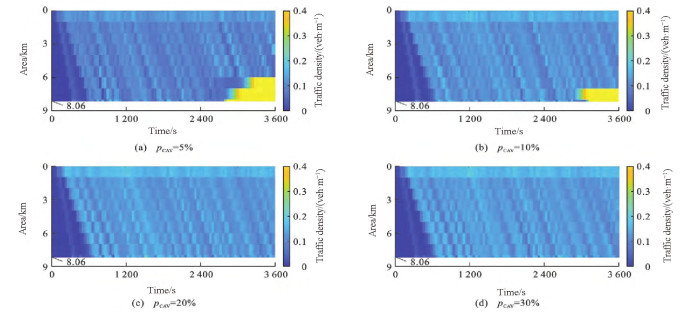
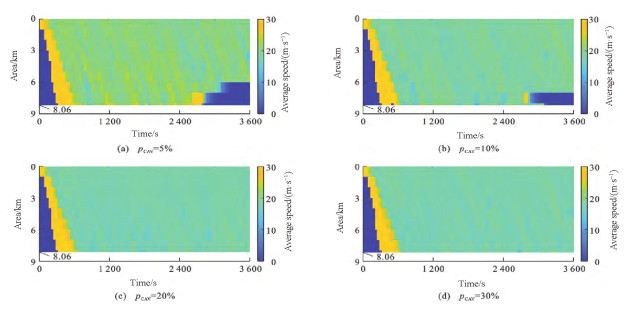
摘要:
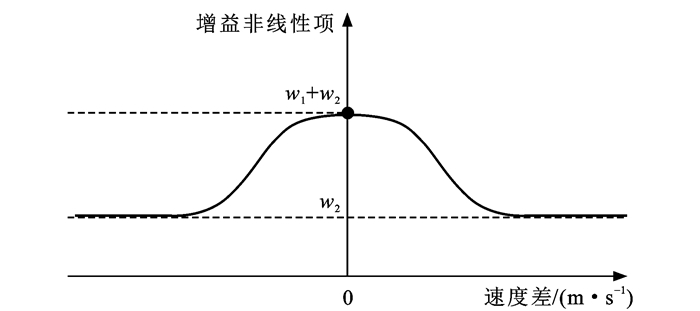
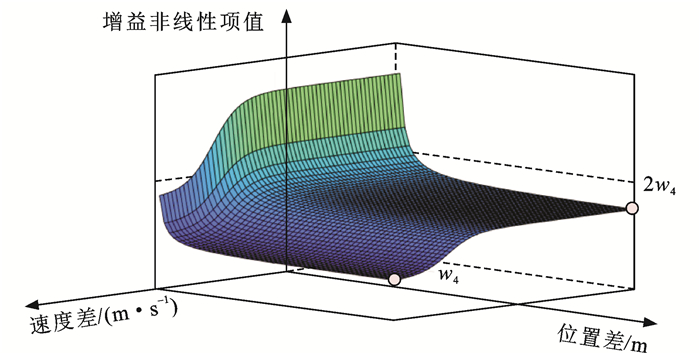
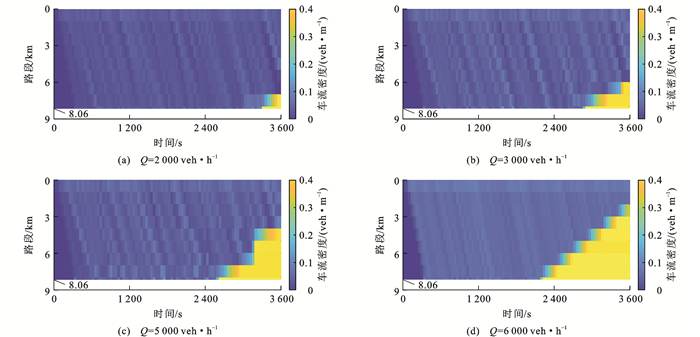
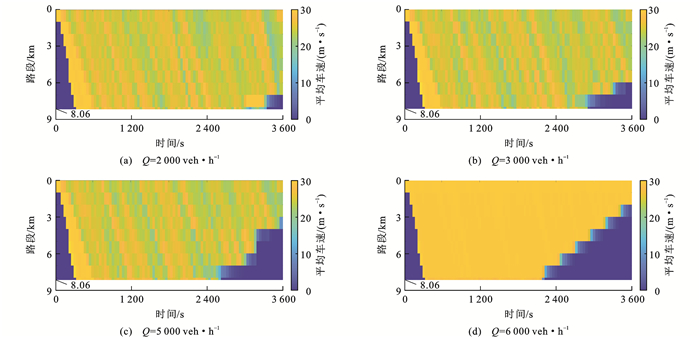
针对传统人驾车(HV)和网联自动车(CAV)组成混合交通条件下的快速路道路缩减瓶颈问题,从群体控制角度,提出了一种新的速度协调控制策略(简称节流控制策略);基于瓶颈交通状态和Greenshields模型,设计了领航CAV速度控制器;面向CAV节流群体组群过程的控制问题,提出了目标切换下的非线性控制器;构建了CAV节流群体类队列控制器,实现了基于瓶颈交通状态的群体形态与群体速度动态调节,进而联合领航CAV速度控制方法,周期性管控超过每组节流群体的车辆;提出了CAV纵向安全控制器来解决组群和群体演化过程的车辆安全问题。仿真结果表明:在快速路瓶颈路段下,对比传统交通系统,提出的动态节流控制策略CAV渗透率达到5%,在车流量分别为2 000、3 000、5 000、6 000 veh·h
-1
条件下,可对应分别提高通行效率约5.87%、16.97%、11.07%、10.25%;在固定车流量为3 000或6 000 veh·h
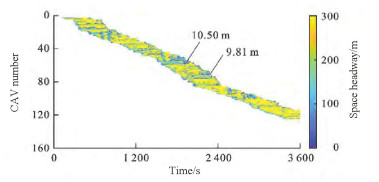
-1
的快速路混合交通瓶颈路段中,对比传统交通系统,若CAV渗透率分别为10%、20%、30%,受控交通系统的通行效率可提升约24%;通过对车头间距分析,受控CAV在节流全过程中无碰撞事故发生,且可与前车保持9 m以上安全距离。可见,节流控制策略在应对快速路瓶颈问题是有效的。
更多>
2022, 22(3): 162-173.
doi:
10.19818/j.cnki.1671-1637.2022.03.013
摘要
(
1684
)
HTML
(
628
)
PDF (17362KB)
(
221
)
引用
(
)
大规模路网中分布式车辆群体协同决策方法
裴华鑫
,
杨敬轩
,
胡坚明
,
张毅
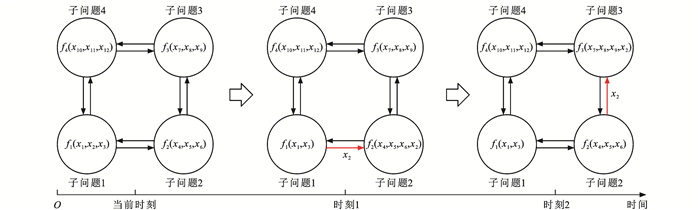
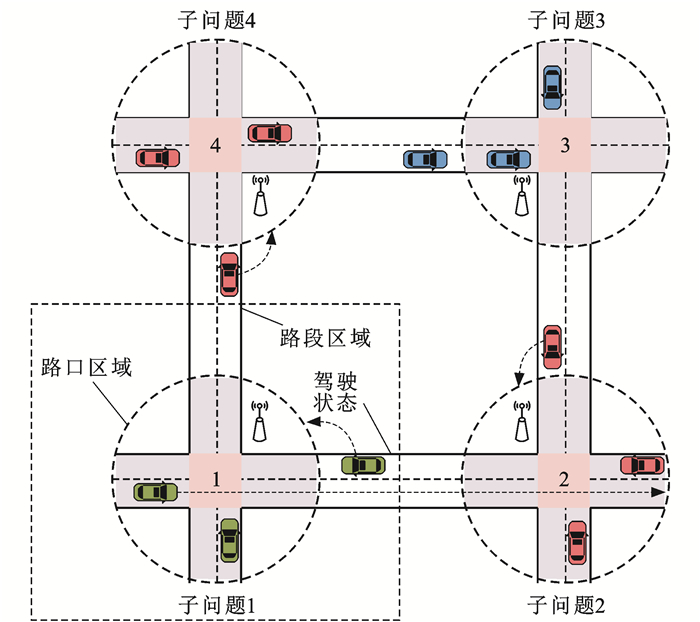
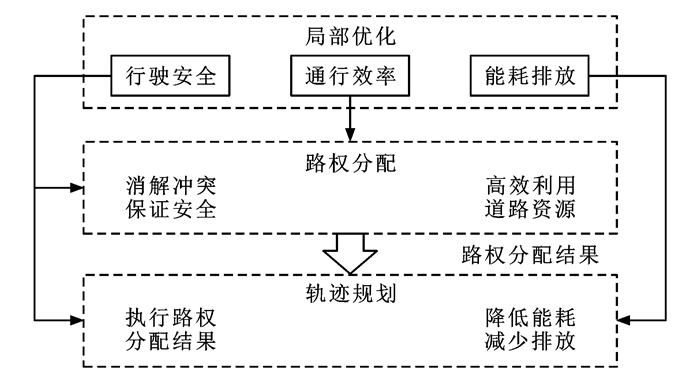
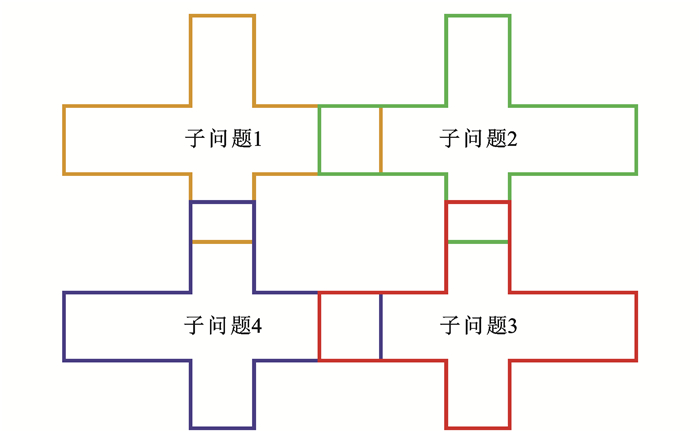
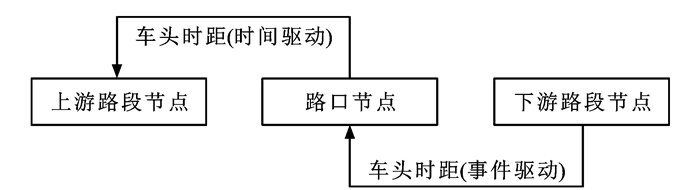
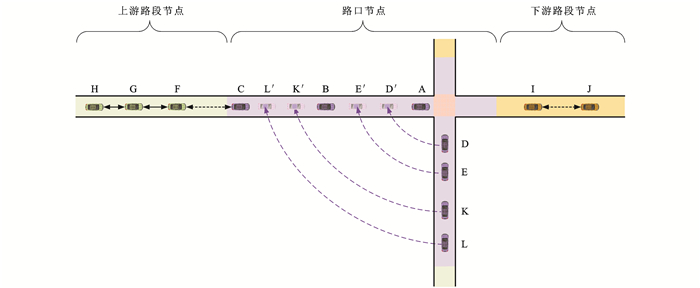
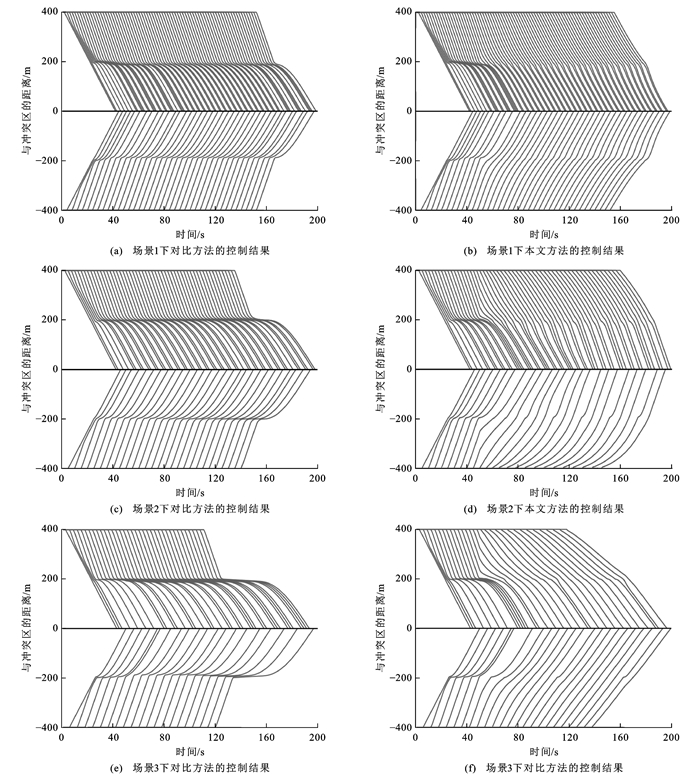
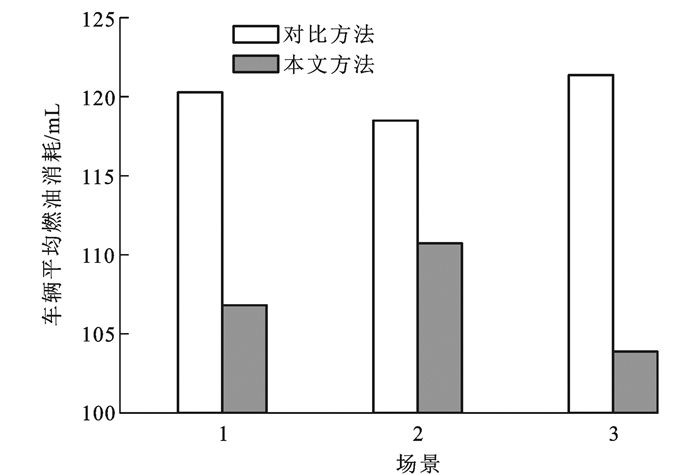
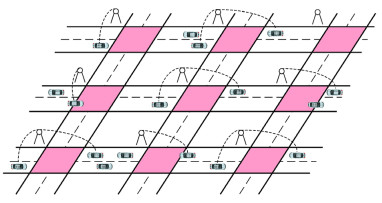
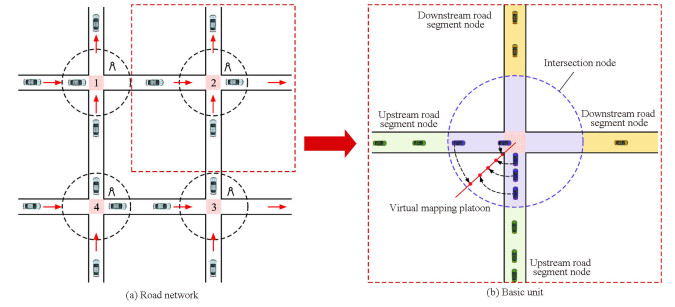
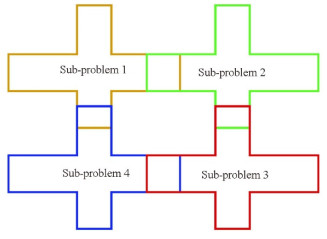
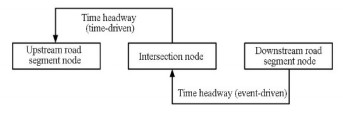
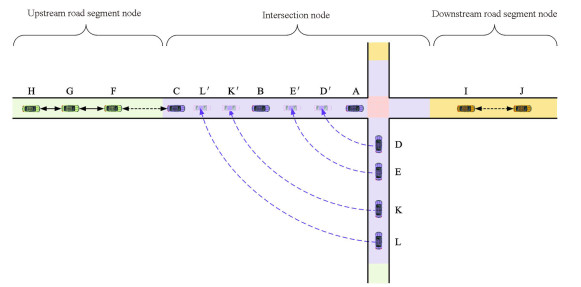
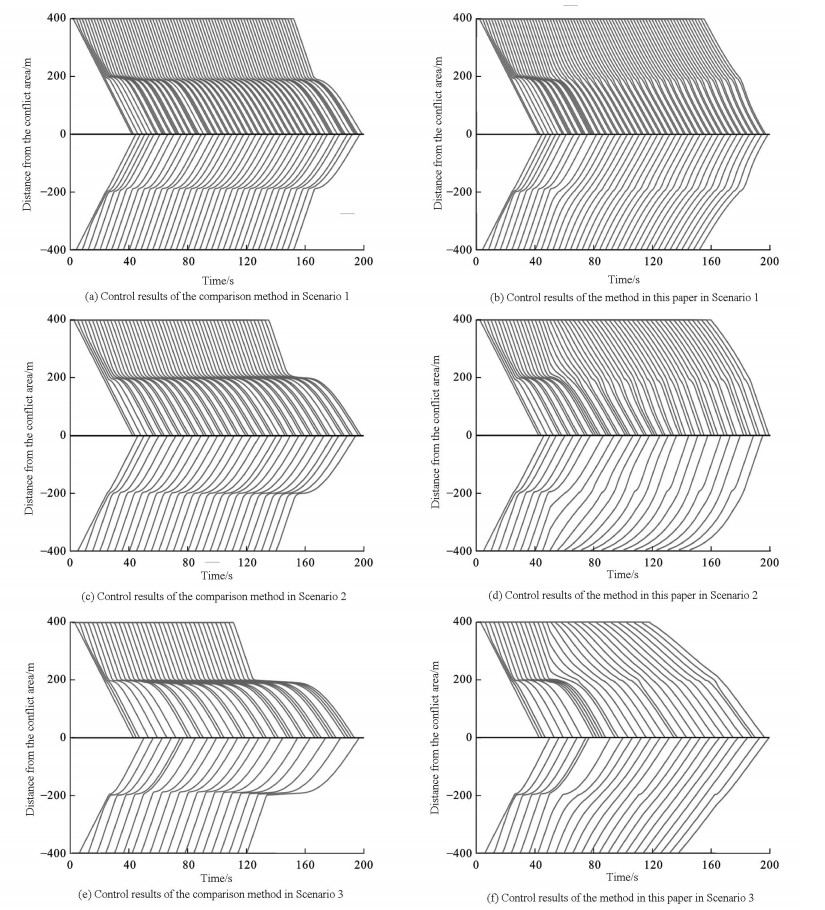
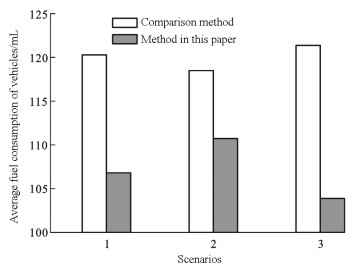
摘要:
为解决车路协同环境下大规模路网中车辆群体协同决策问题,提出了分布式车辆群体协同决策方法;在深入分析交通控制特性的基础上,构建了路网分解模型,将大规模协同决策问题分解成若干个同质小规模子问题,每个子问题覆盖了上游路段、路口和下游路段这3类不同交通区域;基于虚拟车辆映射技术构建了车辆群体协同决策模型,将路口区域二维车辆群体协同决策问题转化为一维问题;与路段区域内车辆群体协同决策方式相同,在路口区域内通过控制虚拟车队中车辆的等效车头时距来完成车辆之间的交互和冲突消解,进而采用统一的协同决策参数来解决各子问题中不同区域内车辆群体的协同决策问题;基于不同区域内车辆群体协同决策参数的统一化,设计了上、下游区域之间的协作机制来保证上游车辆在充分考虑下游交通状态的基础上做出合适的驾驶决策。仿真结果表明:在不同的交通需求设置下,采用提出的方法后,车辆在通过冲突区的过程中均具有平滑的时空轨迹,避免了车辆时空轨迹出现剧烈波动;相对于纯分布式方法,提出的方法在给定的仿真条件下可使车辆燃油消耗最大降低14%;因此,在大规模路网中实施提出的分布式车辆群体协同决策方法可有效降低冲突区对车流连续性的影响,从而保证了车辆安全、平稳、环保地行驶。
更多>
2022, 22(3): 174-183.
doi:
10.19818/j.cnki.1671-1637.2022.03.014
摘要
(
2051
)
HTML
(
725
)
PDF (6079KB)
(
244
)
引用
(
)
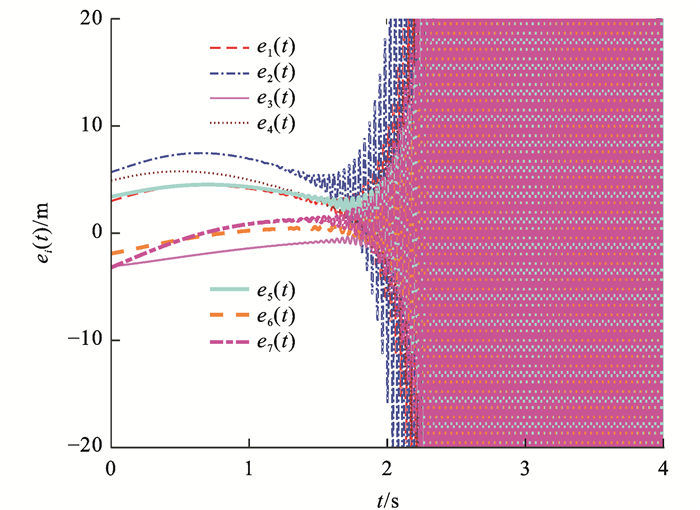
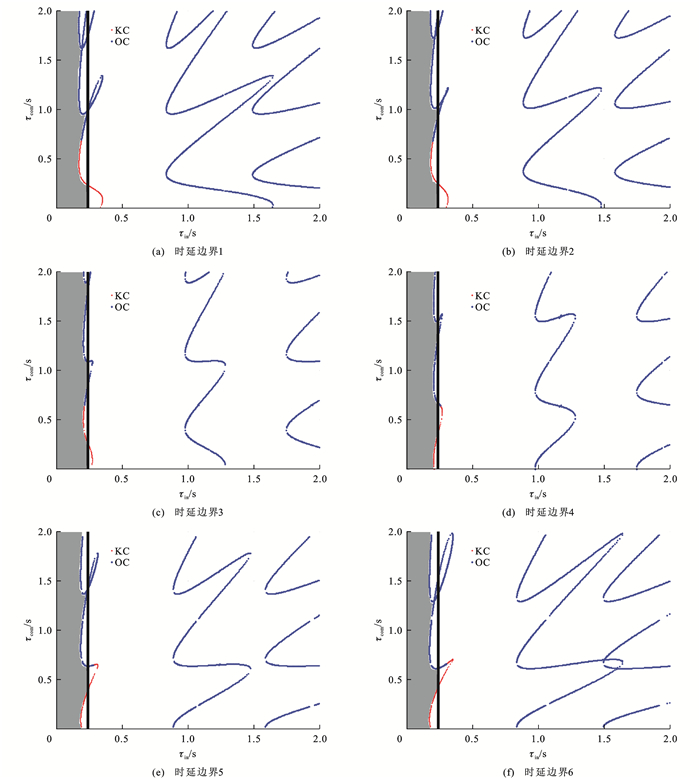
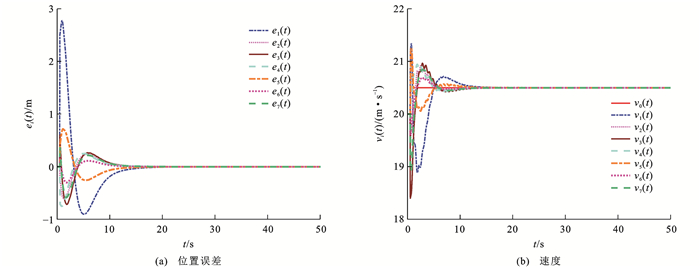
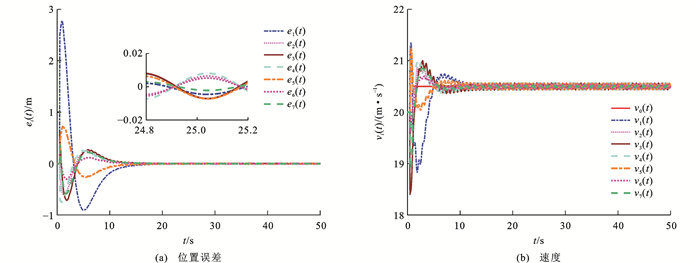
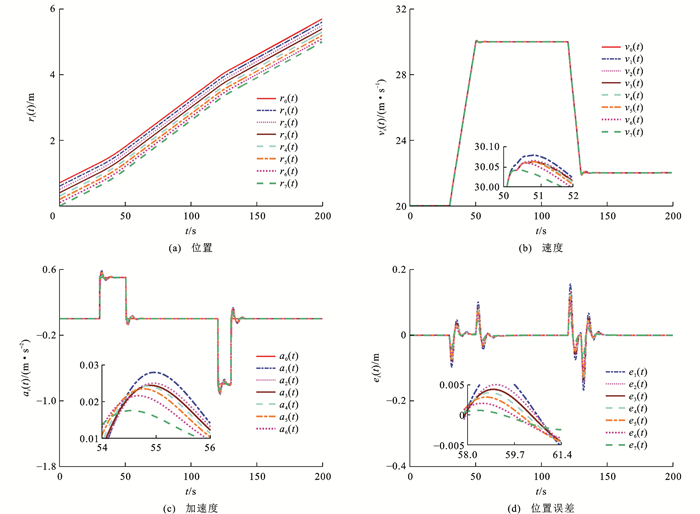
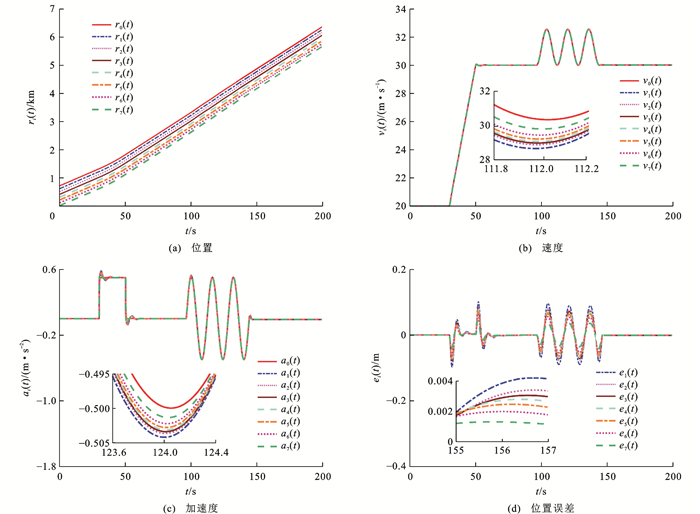
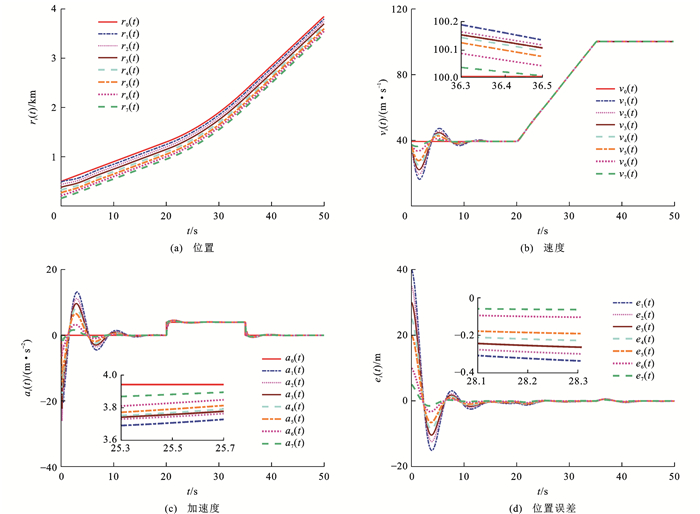
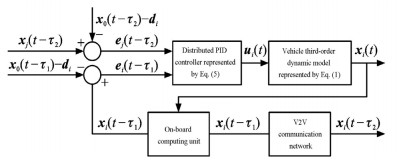
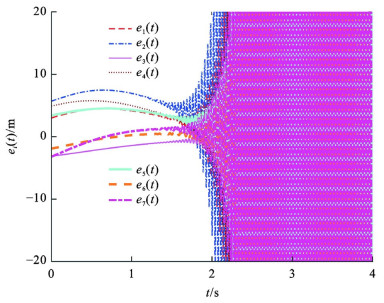
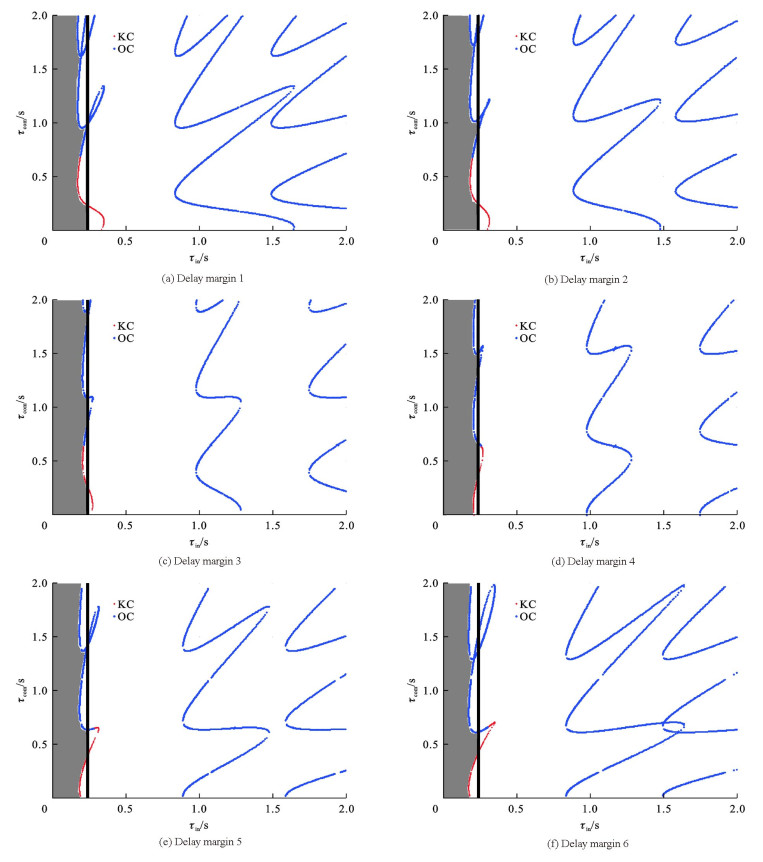
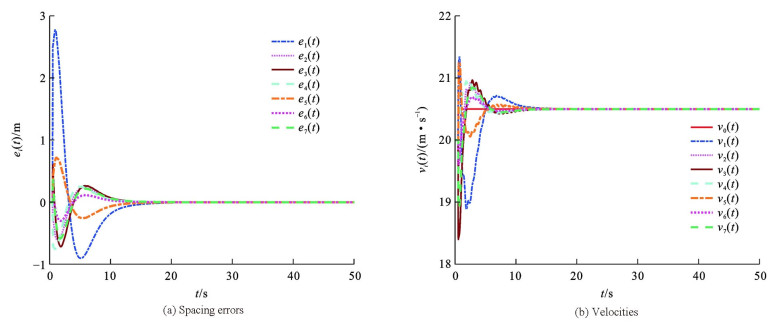
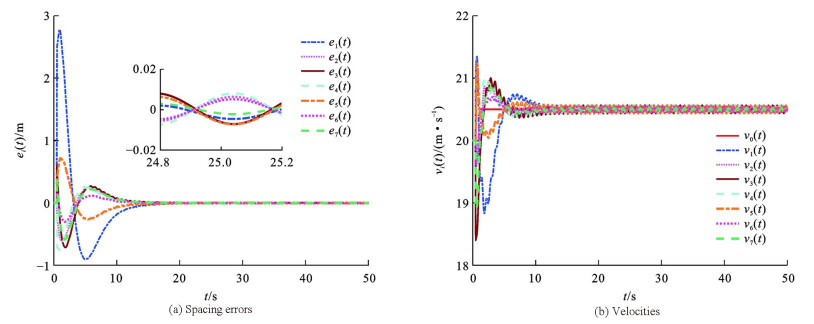
含输入时延与通信时延的车辆队列PID控制系统稳定性
朱旭
,
张泽华
,
闫茂德
摘要:
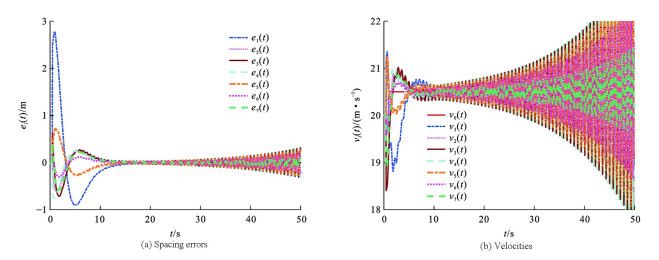
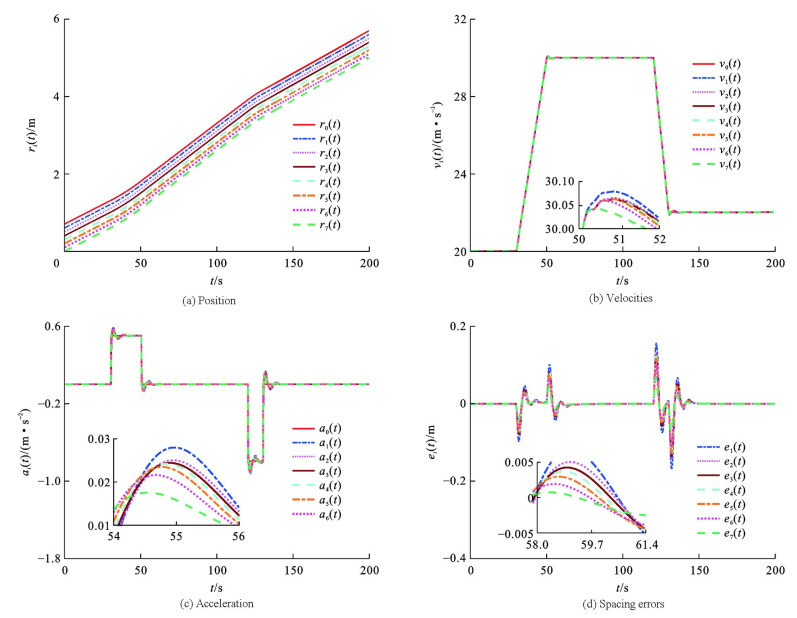
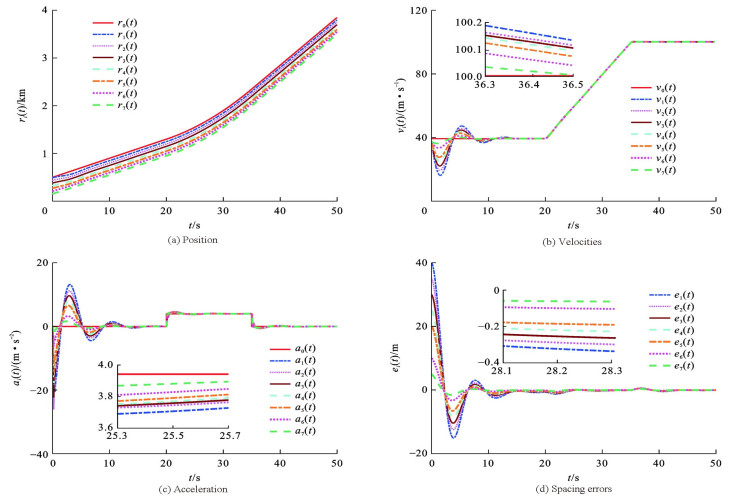
针对含输入时延与通信时延的车辆队列PID控制系统,分析了其内部稳定性和队列稳定性,研究了内部稳定的充要条件,求解了完整、精确的时延边界;在内部稳定性分析中,考虑输入时延与通信时延影响下车辆队列PID控制系统为中立型双时延系统的特点,结合Rekasius代换和劳斯表,提出了关于中立算子的系统强稳定充要条件;在此基础上,为了便于PID参数的快速选取,推导了一种形式更为简练的系统强稳定充分条件;在强稳定条件下,基于特征根聚类法求解了系统完整、精确的时延边界;针对具有奇数辆跟随车的车辆队列,推导了无关车辆队列规模的输入时延上界;在队列稳定性分析中,为了保证干扰和误差沿车辆队列向后传播不发散,分析了车间误差传递函数,给出了双时延影响下队列稳定的充分条件。仿真结果表明:在含输入时延与通信时延的分布式PID控制器作用下,车辆队列控制系统可同时保证内部稳定和队列稳定;车间状态误差可在15 s内快速减小并趋近于零;在所有车辆恒速行驶时,车间保持50 m期望安全距离;在领航车以0.5 m·s
-2
加速和0.8 m·s
-2
减速时,跟随车的速度和加速度随领航车变化,并在领航车速度稳定时一致;车辆队列在不同行驶工况下,由领航车加、减速引起的车间位置误差小于0.2 m,且沿车辆队列向后传播不发散。
更多>
2022, 22(3): 184-198.
doi:
10.19818/j.cnki.1671-1637.2022.03.015
摘要
(
2257
)
HTML
(
1026
)
PDF (16384KB)
(
267
)
引用
(
)
面向车路协同孪生仿真测试的多尺度滤波同步方法
邱威智
,
上官伟
,
柴琳果
,
褚端峰
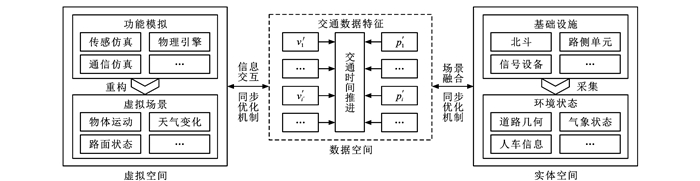
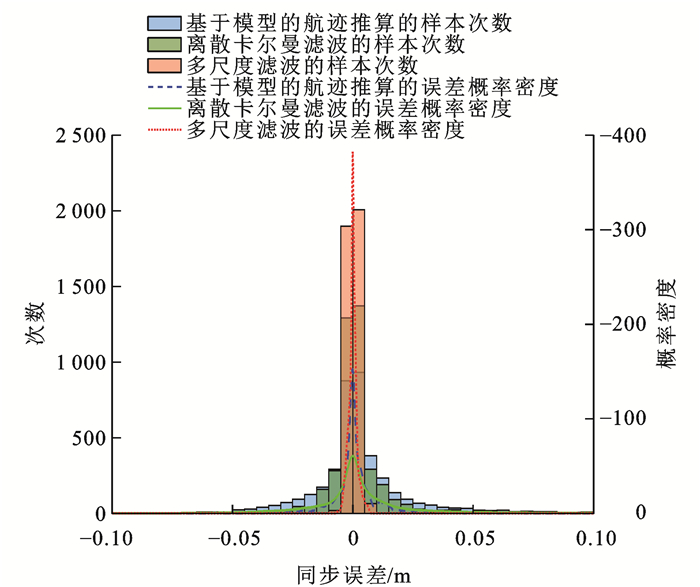
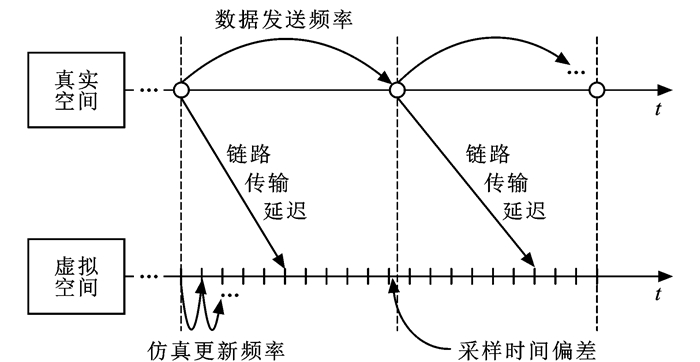
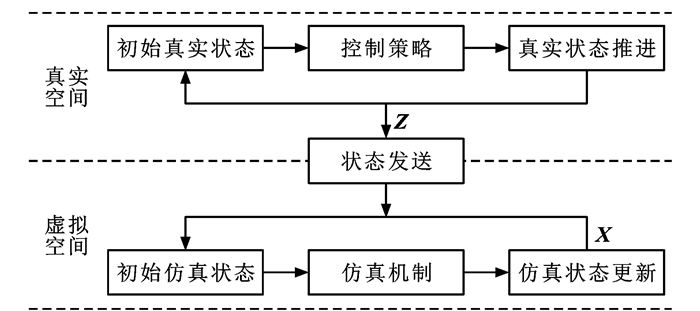
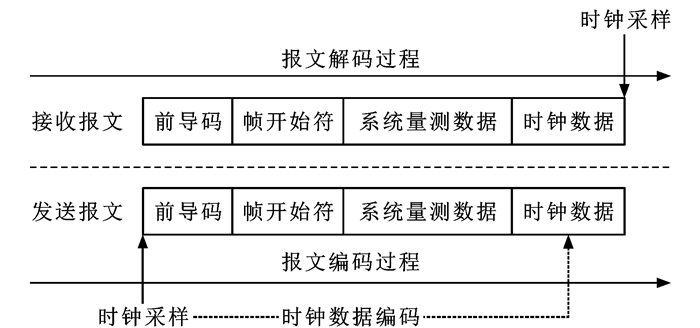
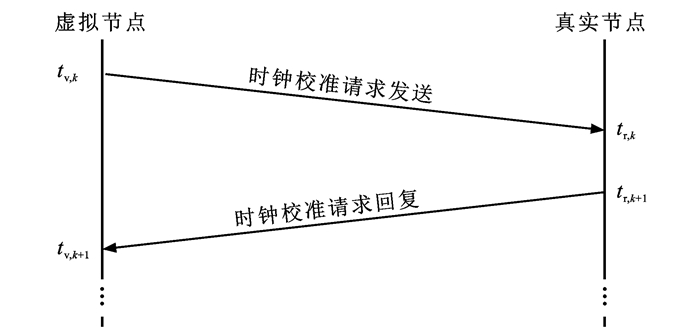
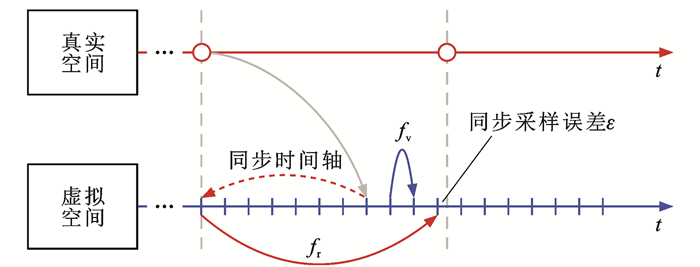
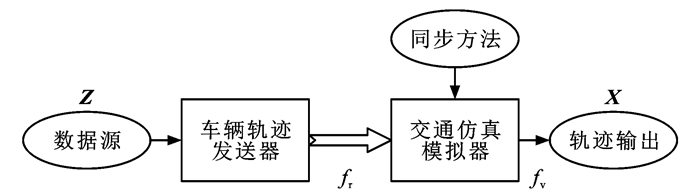
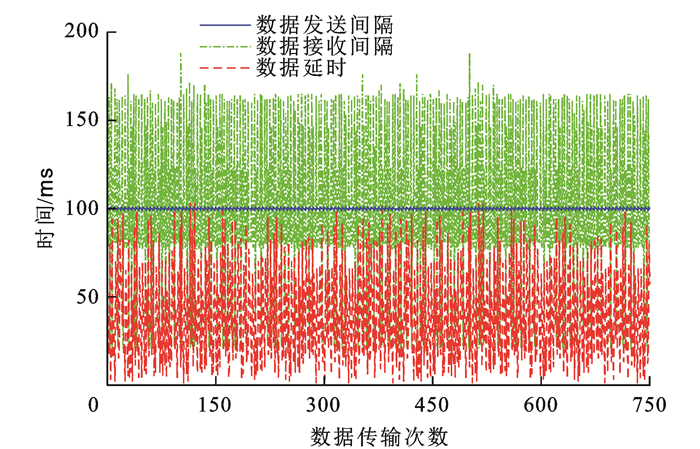
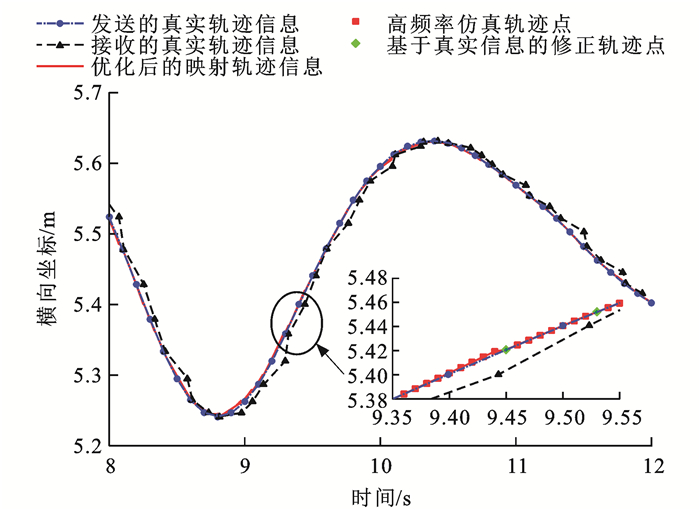
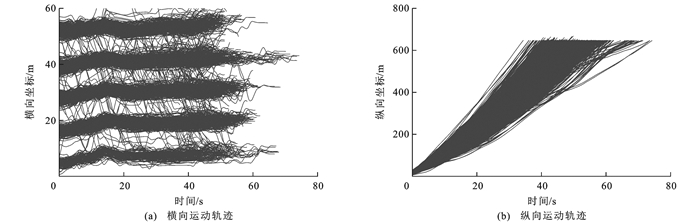
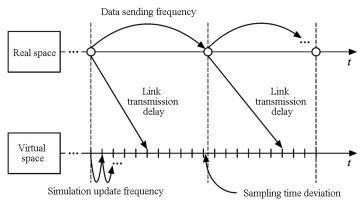
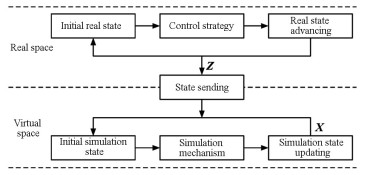
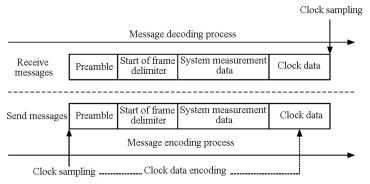
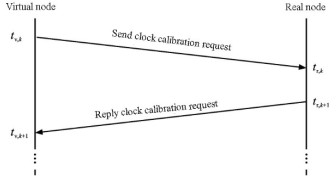
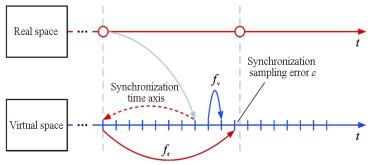
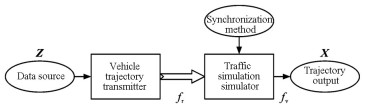
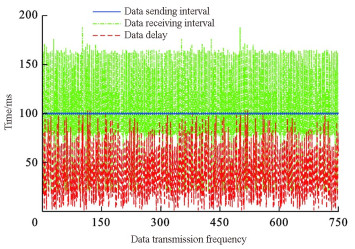
摘要:
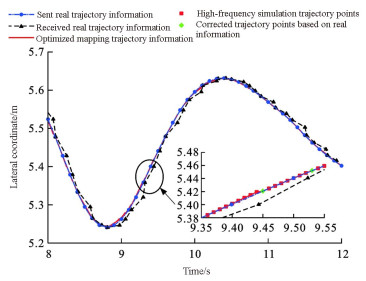
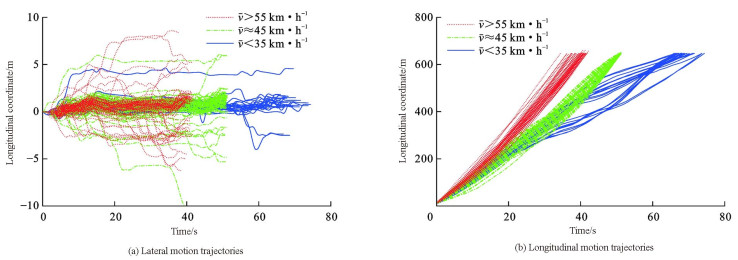
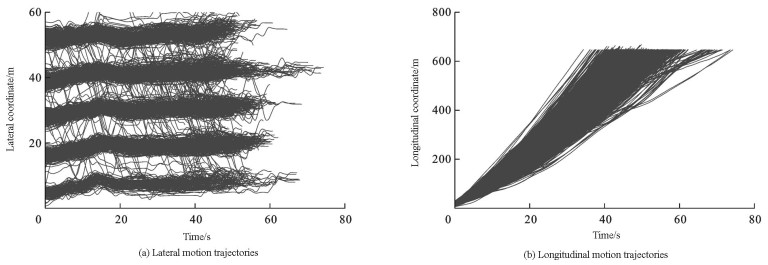
为提升车路协同孪生仿真测试系统的同步性能,明确了孪生主体的运行机理,分析了影响系统同步性能的干扰因素,建立了孪生状态同步映射模型; 针对孪生状态采样的时钟异步问题,设计了时钟误差估计策略,修正了孪生仿真测试系统的量测时间偏差; 在此基础上,结合卡尔曼滤波原理,引入多尺度滤波器更新机制,建立了考虑同步采样误差的量测噪声模型,提出了多尺度滤波同步优化方法; 最后,在搭建的孪生仿真测试原型系统中,选取NGSIM数据集的车辆轨迹开展试验。研究结果表明:在不同车辆速度条件下,提出的多尺度滤波同步优化方法能够保持良好的同步性能; 在横向坐标同步方面,平均绝对误差小于1 mm,99.5%的绝对误差控制在8 mm以内; 在纵向坐标同步方面,平均绝对误差小于9 mm,99.5%的绝对误差控制在38 mm以内; 在速度同步方面,平均绝对误差小于2.8 cm·s
-1
,99.5%的绝对误差控制在24 cm·s
-1
以内; 在偏航角同步方面,平均绝对误差小于1.1×10
-3
rad,99.5%的绝对误差控制在1.1×10
-2
rad以内; 与航迹推算方法相比,提出的方法能够在横向坐标、纵向坐标、速度和偏航角方面平均提升30.0%的同步精度,能够有效解决孪生主体的状态异步问题,可保障车路协同孪生仿真测试系统的实时同步与精准运行。
更多>
2022, 22(3): 199-209.
doi:
10.19818/j.cnki.1671-1637.2022.03.016
摘要
(
1933
)
HTML
(
555
)
PDF (7091KB)
(
168
)
引用
(
)
基于金字塔多尺度融合的交通标志检测算法
高涛
,
邢可
,
刘占文
,
陈婷
,
杨朝晨
,
李永会
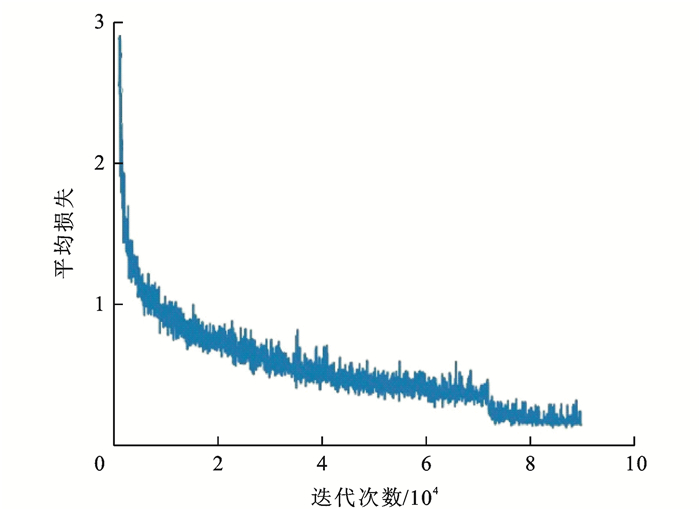
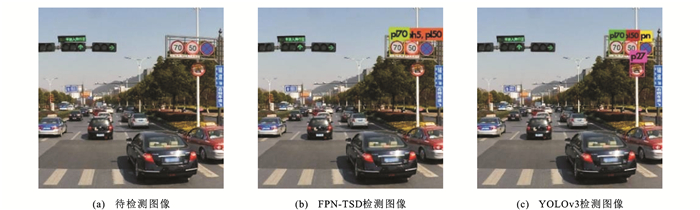
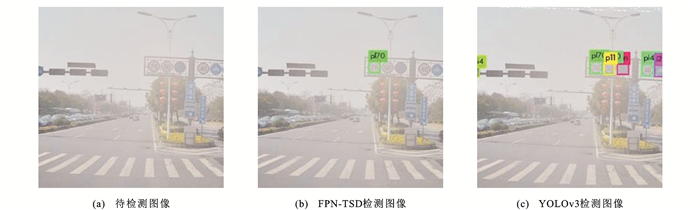
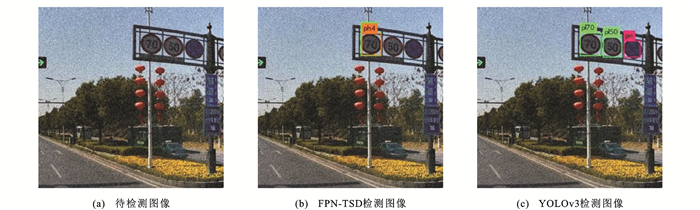
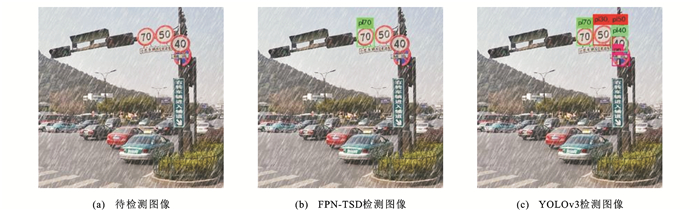
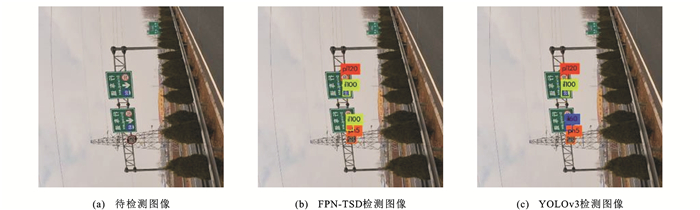
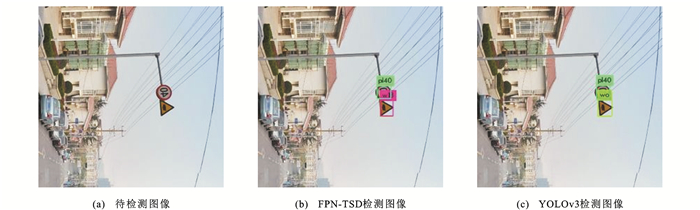
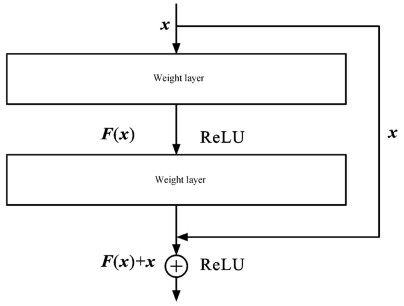
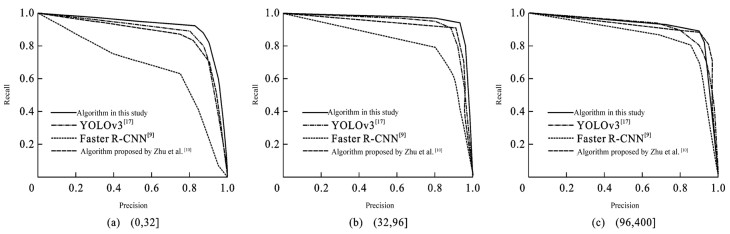
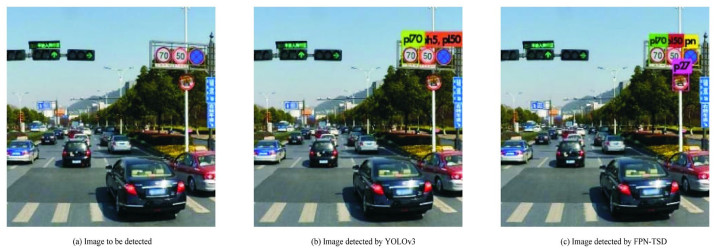
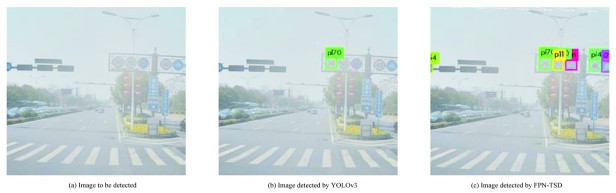
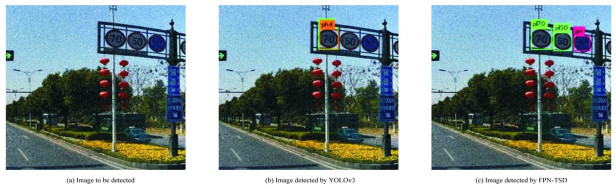
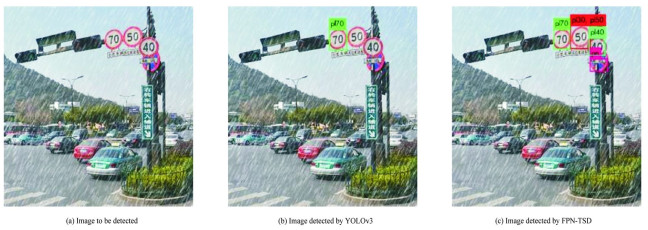
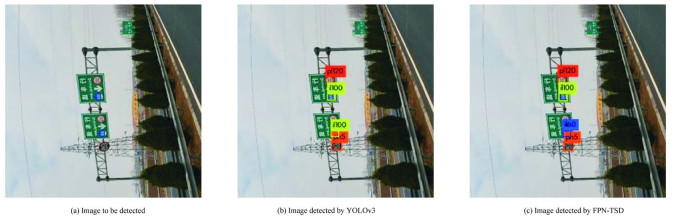
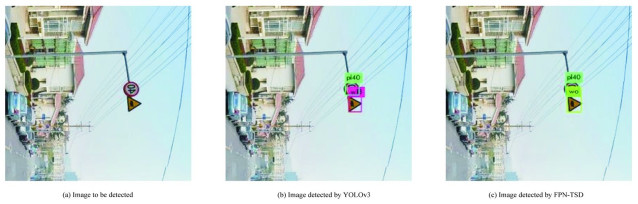
摘要:
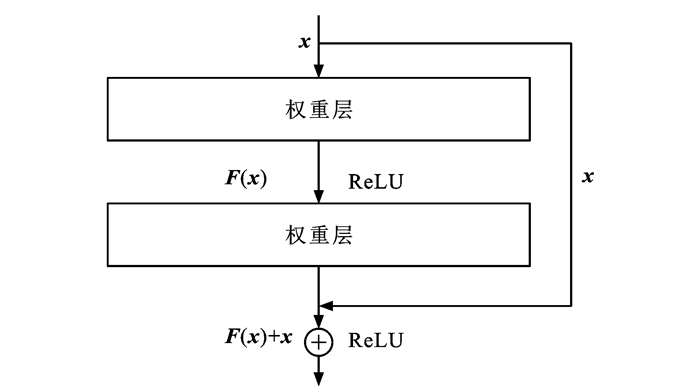
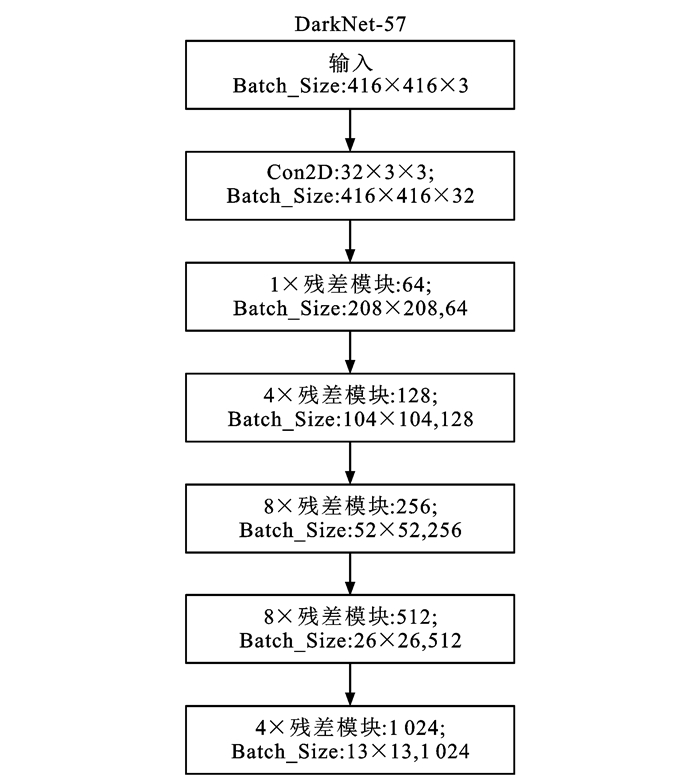
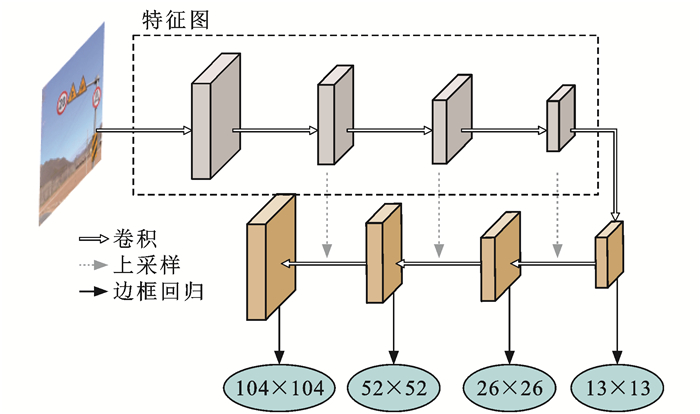
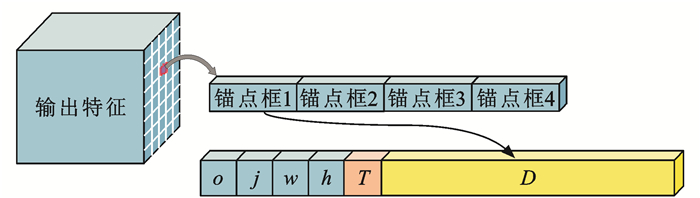
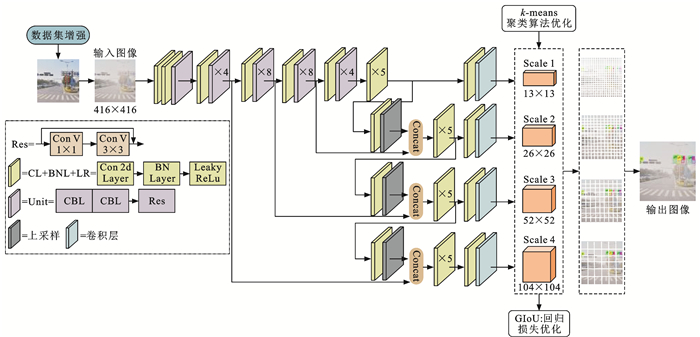
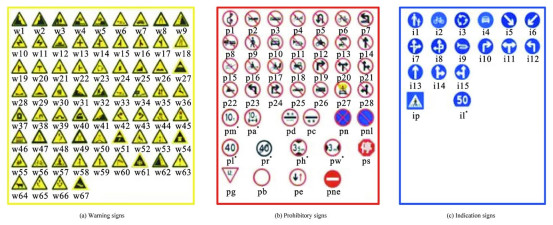
为了解决传统交通标志检测算法针对小目标交通标志检测时存在误检与漏检的问题,提出了一个基于金字塔多尺度融合的交通标志检测算法;为了提高算法对交通标志的特征提取能力,引入ResNet残差结构搭建算法的主干网络,并增加网络浅层卷积层数,以提取较小尺度交通标志目标更准确的语义信息;基于特征金字塔结构的思想,在检测结构中引入4个不同预测尺度,增强深层和浅层特征融合;为了进一步提高算法检测精度,引入GIoU损失函数定位交通标志的锚点框,利用
k
-means算法对交通标志标签信息进行聚类分析并生成更精准的先验框;为了验证算法的泛化性与解决试验所用数据集TT100K的类间不平衡问题,增强与扩充了数据集。试验结果表明:本文算法的精确率、召回率与平均精度均值分别达到了86.7%、89.4%与87.9%,与传统目标检测算法相比有显著提高;多尺度融合检测机制、GIoU损失函数与
k
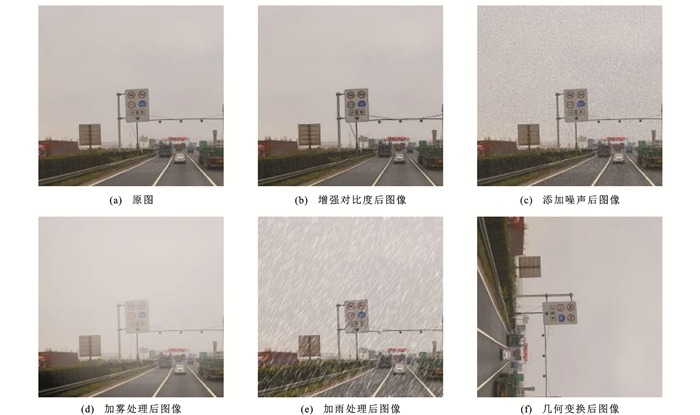
-means的引入能够不同程度提高算法的检测性能,使算法检测精确率分别提升4.7%、1.8%与1.2%;提出算法针对不同尺度交通标志检测时均有更优越的性能表现,在TT100K数据集中的(0, 32]、(32, 96]与(96, 400]尺度下的检测召回率分别达到90%、93%与88%;与YOLOv3相比,提出算法在不同天气、噪声与几何变换等干扰下均能实现对交通标志的正确定位与分类,证明了提出算法具有良好的鲁棒性与泛化性,适用于道路交通标志检测。
更多>
2022, 22(3): 210-224.
doi:
10.19818/j.cnki.1671-1637.2022.03.017
摘要
(
2403
)
HTML
(
930
)
PDF (28402KB)
(
188
)
引用
(
)
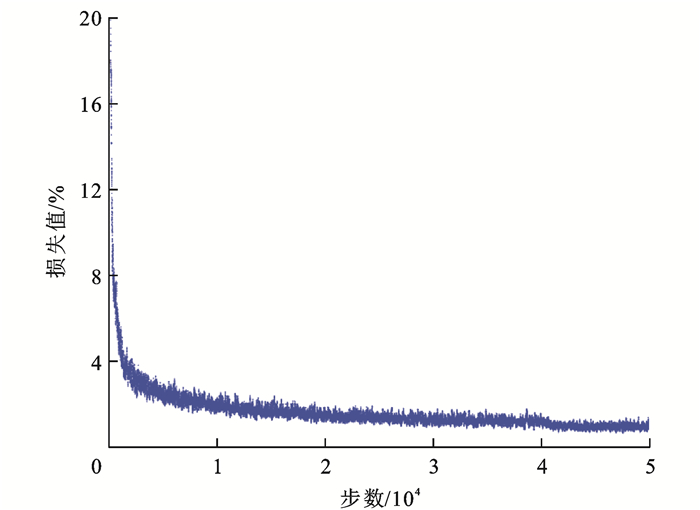
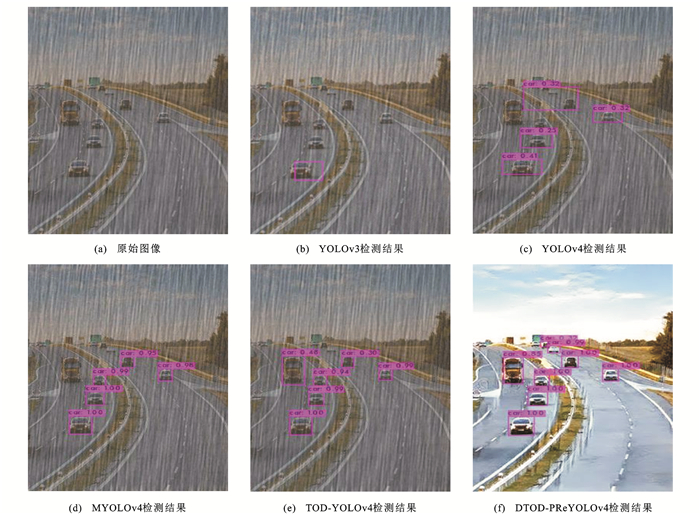
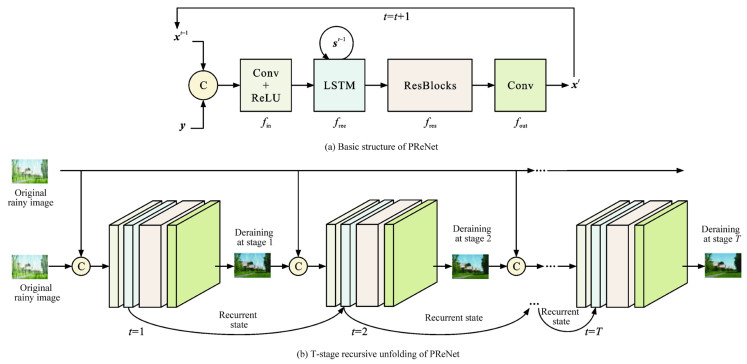
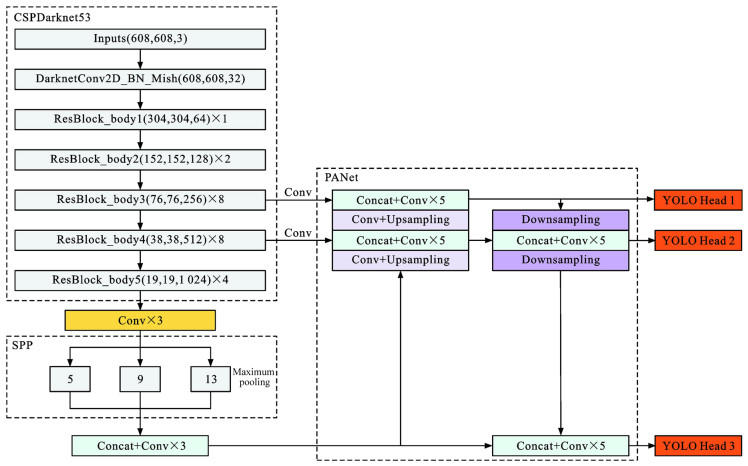
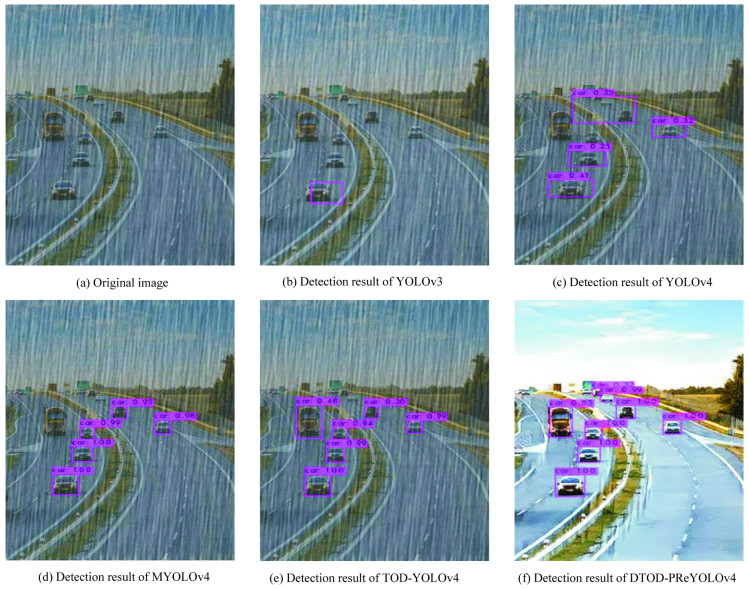
基于PReNet和YOLOv4融合的雨天交通目标检测网络
陈婷
,
姚大春
,
高涛
,
仇会会
,
郭昶鑫
,
刘占文
,
李永会
,
边浩毅
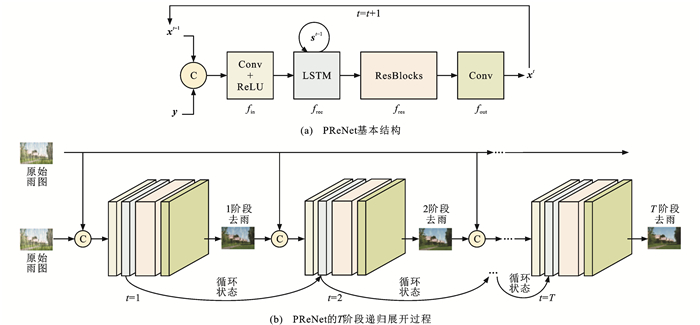
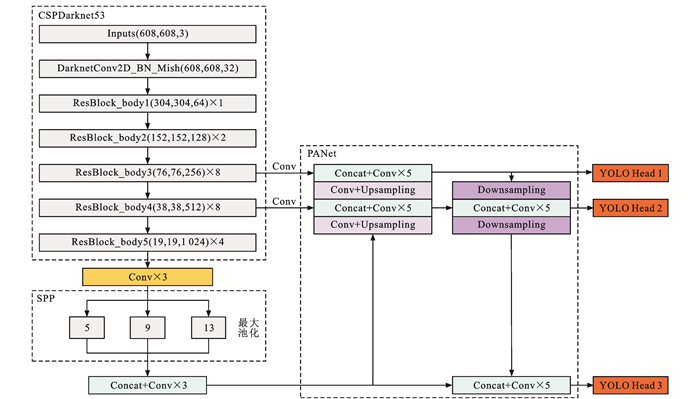
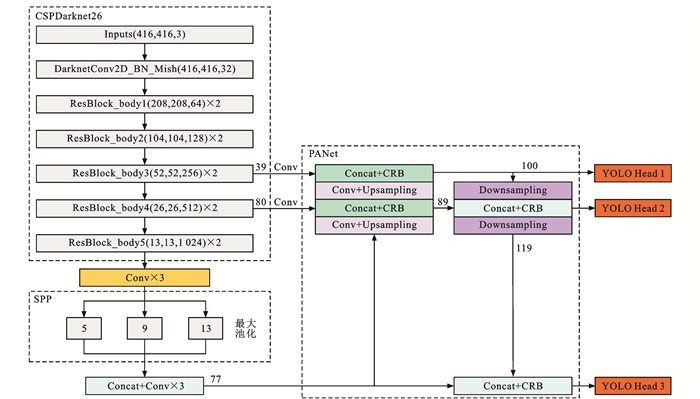
摘要:
为提高恶劣雨天交通环境下车辆目标检测精度,提出一种基于PReNet和YOLOv4融合的深度学习网络DTOD-PReYOLOv4,融合了改进的图像复原子网D-PReNet和改进的目标检测子网TOD-YOLOv4;将多尺度膨胀卷积融合模块和添加了挤压激励块的注意机制残差模块引入PReNet,获得的D-PReNet可更有效提取雨纹特征; 使用轻量化的CSPDarknet26代替YOLOv4骨干模块CSPDarknet53,为YOLOv4的颈部路径聚合网络模块添加复合残差块,同时采用
k
-means++算法取代原始网络聚类算法,获得的TOD-YOLOv4可在改善交通小目标检测精度的同时进一步提高检测效率; 基于构建的雨天交通场景车辆目标数据集VOD-RTE对DTOD-PReYOLOv4进行了验证。研究结果表明:与当前YOLO系列主流网络相比,提出的DTOD-PReYOLOv4对原浅层ResBlock_body1叠加残差块,可以更好地提取分辨率较小的特征; 对原深层ResBlock_body3、ResBlock_body4和ResBlock_body5进行裁剪,获得ResBlock_body3×2、ResBlock_body4×2和ResBlock_body5×2,可以有效降低卷积层冗余,提高内存利用率; 为PANet中的Concat+Conv×5添加跳跃连接形成CRB模块,可以有效缓解网络层数加深引起的小目标检测效果退化问题; 采用
k
-means++算法,在多尺度检测过程中为较大的特征图分配更加适合的较小先验框,为较小的特征图分配更加适合的较大先验框,进一步提高了目标检测的精度; 与MYOLOv4相比,精确率和召回率的调和平均值、平均精度、检测速度分别提升了5.02%、6.70%、15.63帧·s
-1
,与TOD-YOLOv4相比,分别提升了3.51%、4.31%、2.17帧·s
-1
,与YOLOv3相比,分别提升了46.07%、48.05%、18.97帧·s
-1
,与YOLOv4相比,分别提升了31.06%、29.74%、16.26帧·s
-1
。
更多>
2022, 22(3): 225-237.
doi:
10.19818/j.cnki.1671-1637.2022.03.018
摘要
(
3141
)
HTML
(
1144
)
PDF (26171KB)
(
313
)
引用
(
)
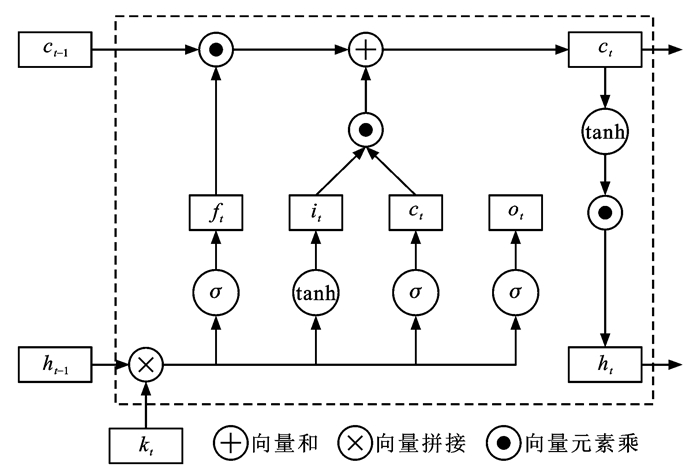
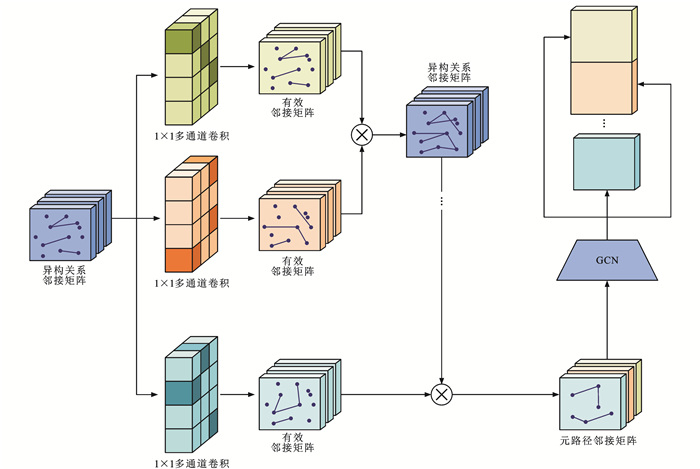
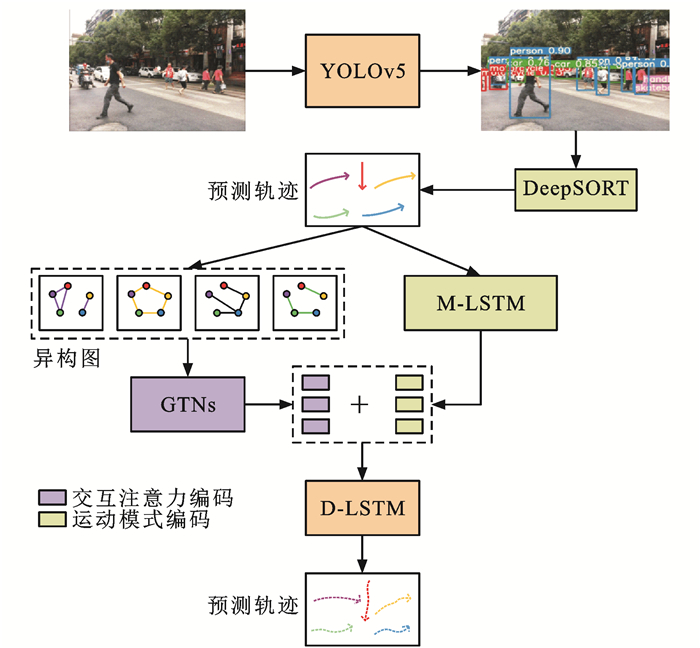
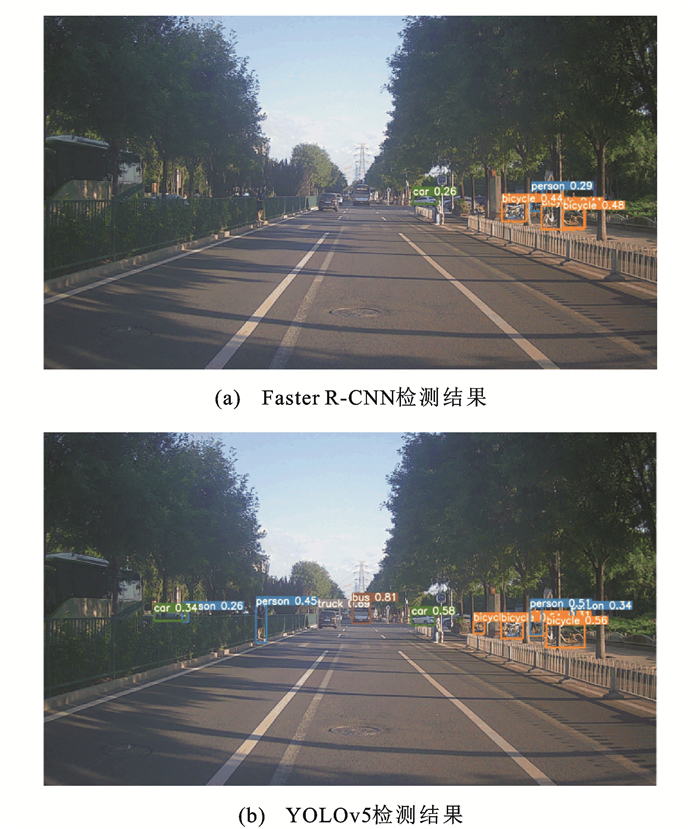
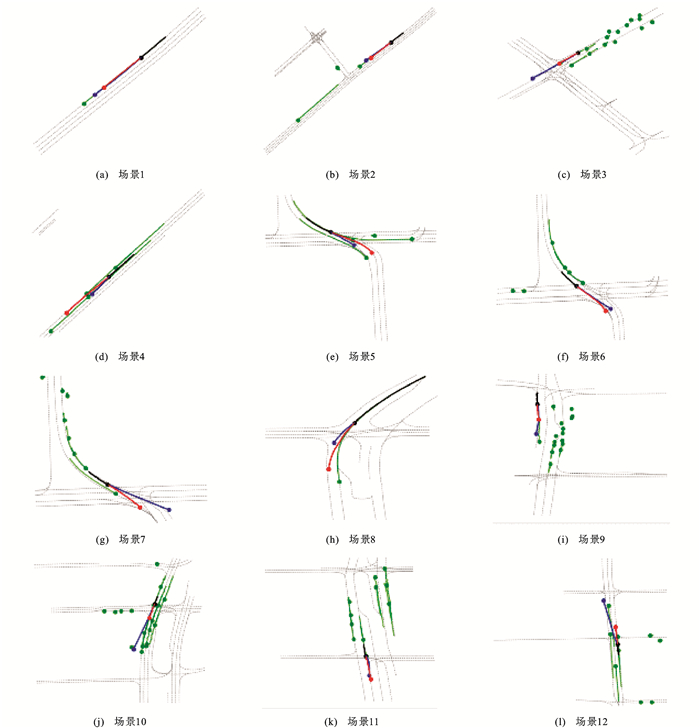
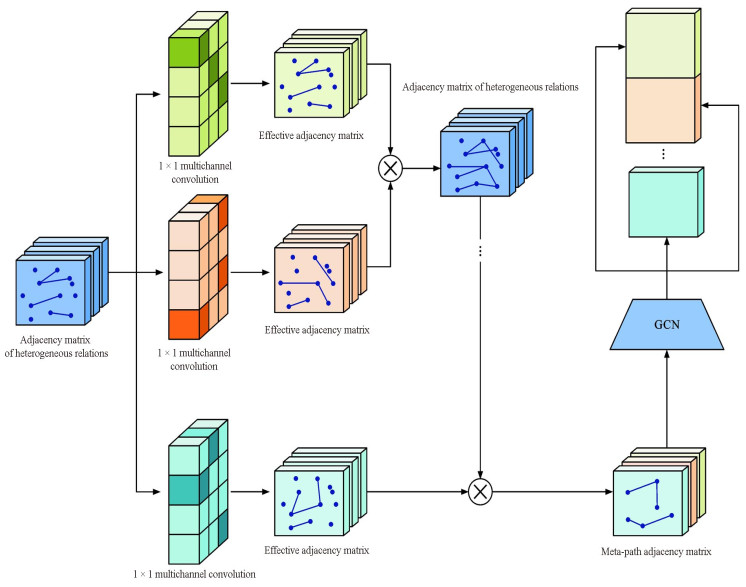
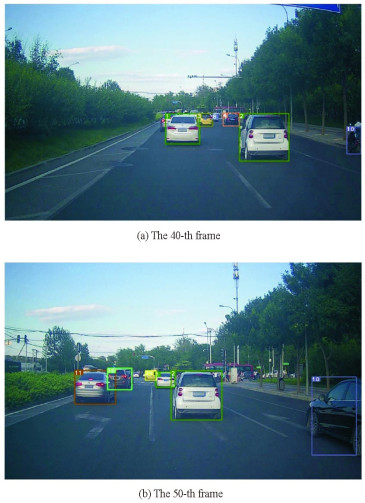
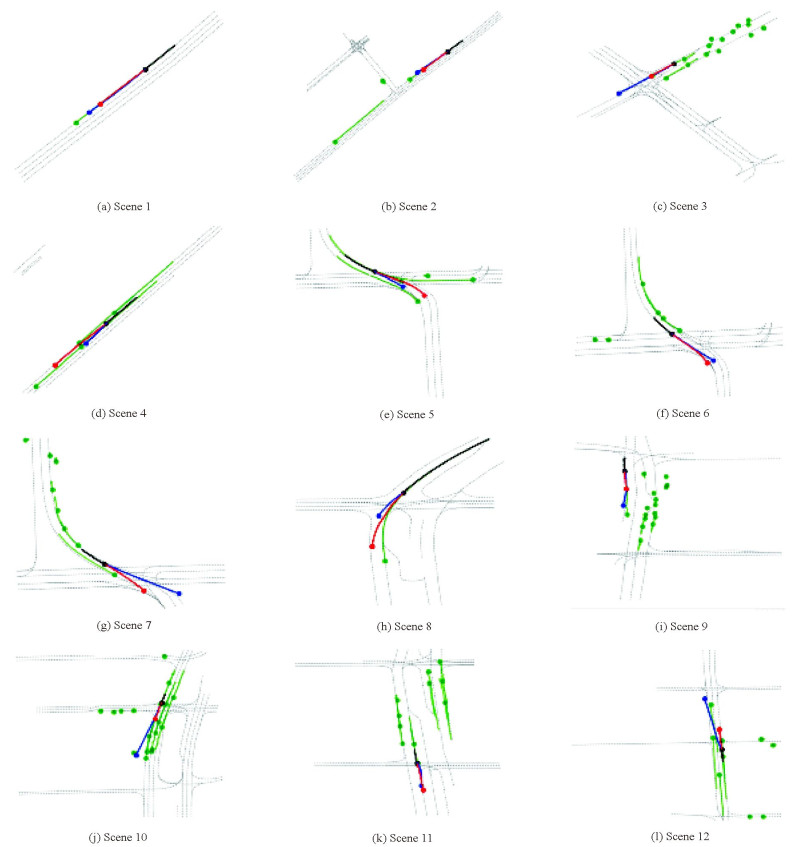
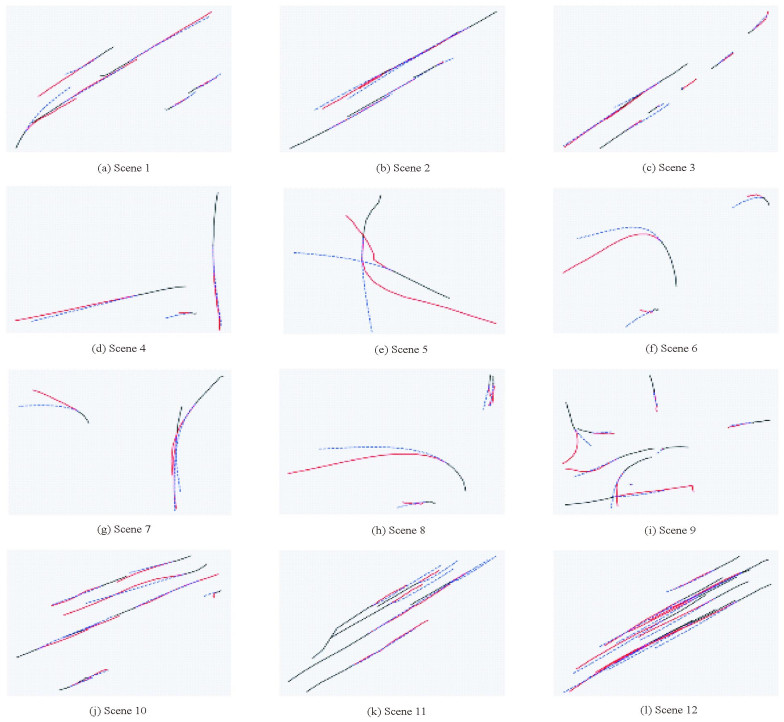
基于异构图学习的交通场景运动目标感知
杨彪
,
闫国成
,
刘占文
,
刘小峰
摘要:
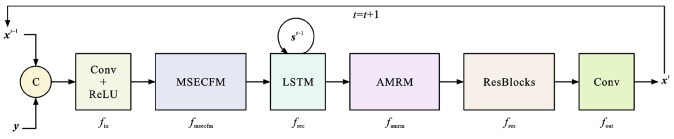
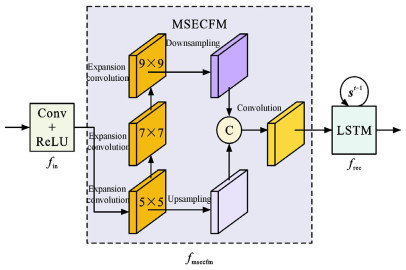
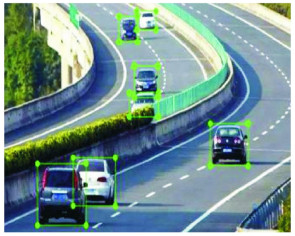
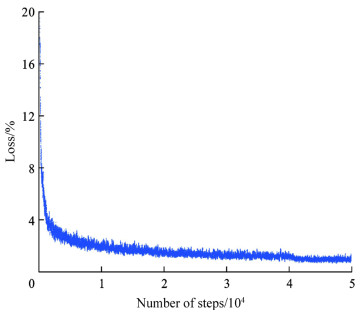
为了提高无人车在交通场景中的运行效率和运输安全,研究了基于异构图学习的交通场景运动目标感知; 考虑实际交通场景中运动目标之间的复杂交互关系对目标运动的影响,基于异构图学习提出了交通场景中多目标检测-跟踪-预测一体化感知框架; 结合YOLOv5和DeepSORT检测并跟踪运动目标,获得目标的运动轨迹; 使用长短期记忆(LSTM)网络从目标历史轨迹中学习目标的运动信息,使用异构图学习目标间的交互信息,以提高运动目标轨迹预测准确度; 使用LSTM网络对目标运动信息与交互信息解码得到目标未来轨迹; 为了验证方法的有效性,在公共交通数据集Argoverse、Apollo和NuScenes上进行了评估。分析结果表明:结合YOLOv5和DeepSORT可实现对运动目标的检测跟踪,对交通场景中的运动目标实现了75.4%的正确检测率和61.4%的连续跟踪率; 异构图能够有效捕捉运动目标之间复杂的交互关系,并且捕捉的交互关系能够提高轨迹预测精度,加入异构图捕捉交互关系后,运动目标的平均位移预测误差降低了63.0%。可见,考虑交通场景中运动目标之间的交互关系是有效的,引入异构图学习运动目标之间的交互关系可以感知运动目标的历史与未来运动信息,从而帮助无人车更好地理解复杂交通场景。
更多>
2022, 22(3): 238-250.
doi:
10.19818/j.cnki.1671-1637.2022.03.019
摘要
(
1711
)
HTML
(
709
)
PDF (19432KB)
(
175
)
引用
(
)
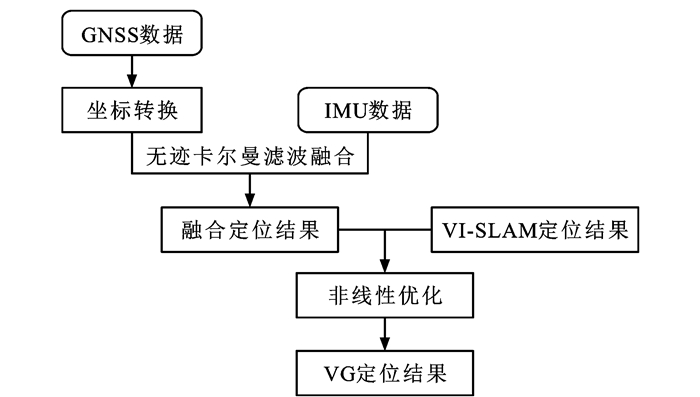
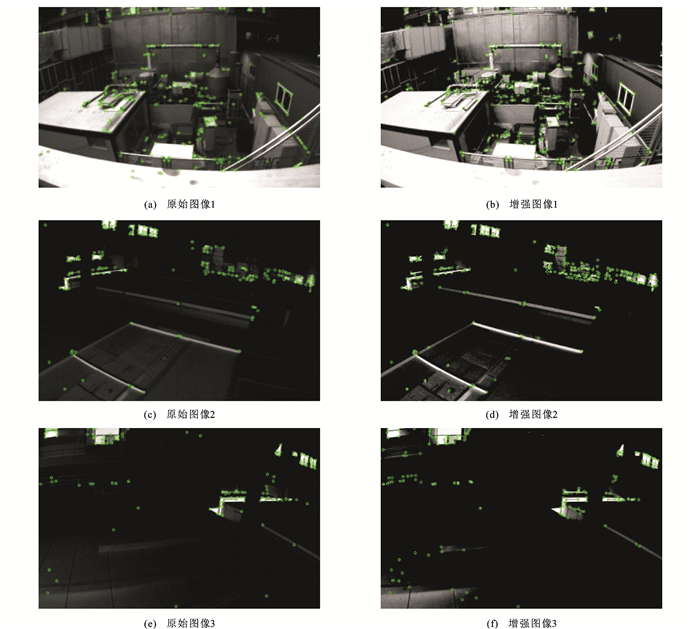
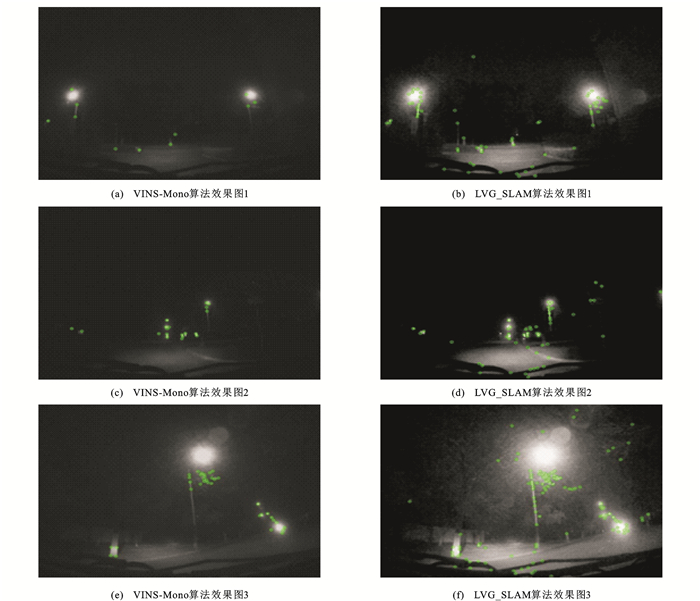
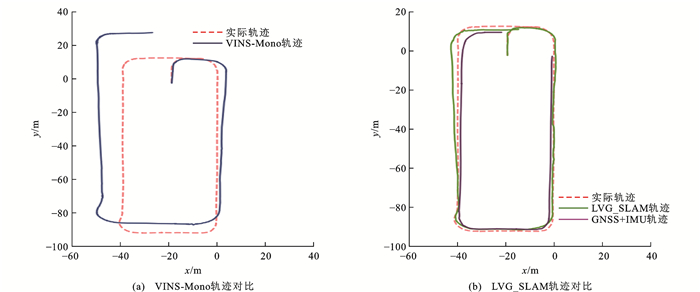
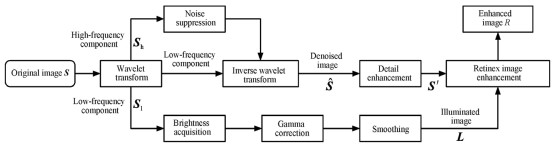
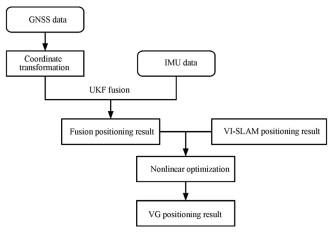
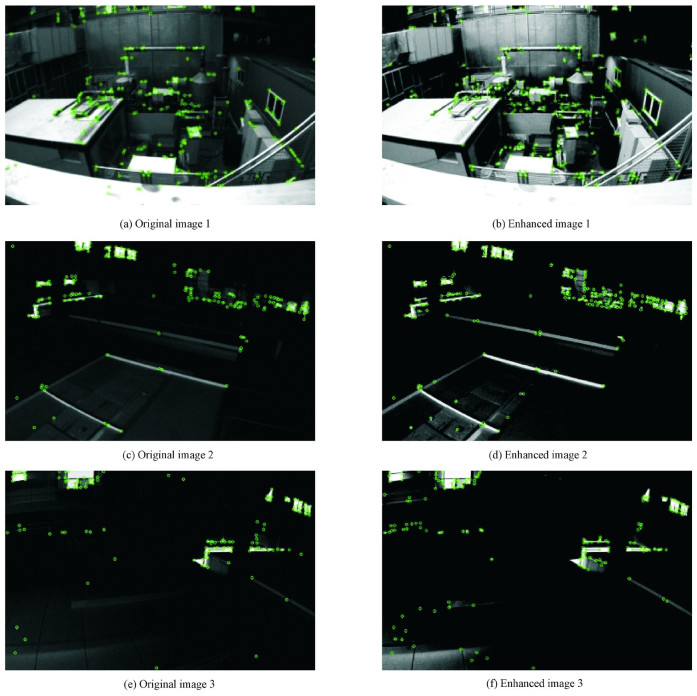
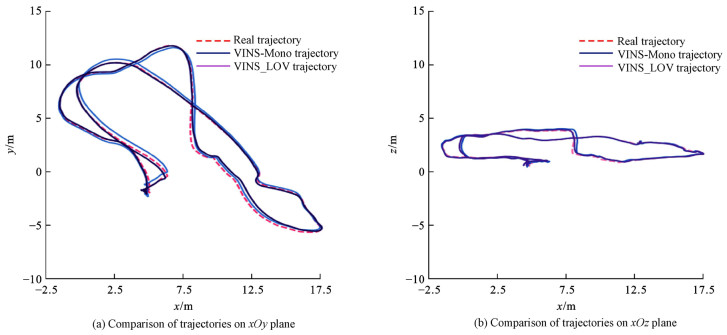
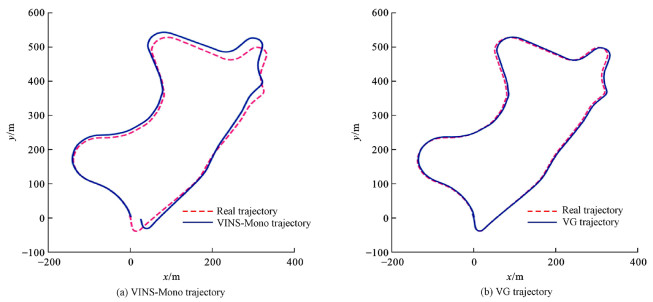
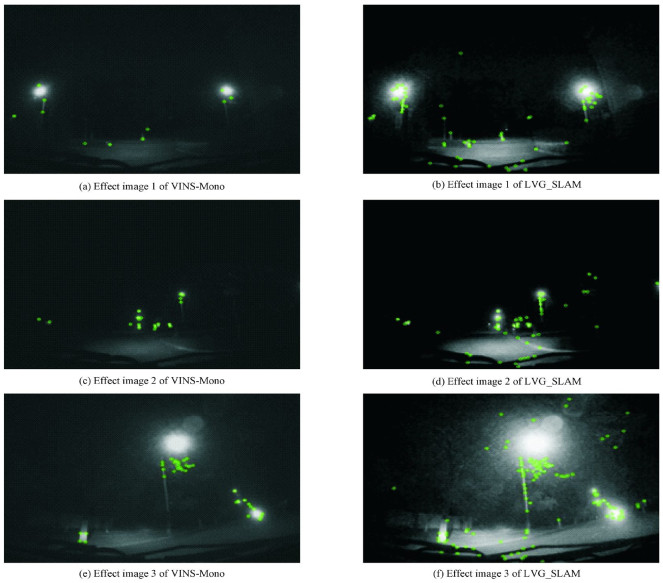
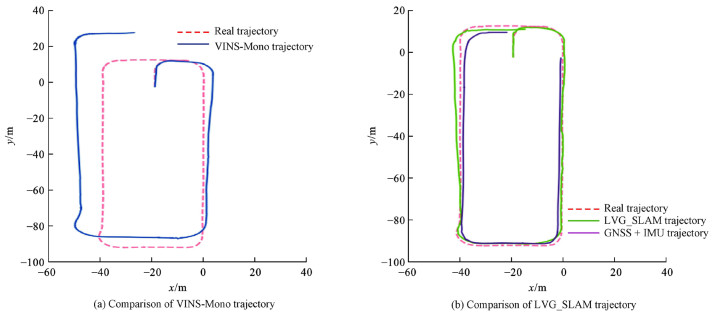
低可见度环境下基于同步定位与构图的无人驾驶汽车定位算法
高扬
,
曹王欣
,
夏洪垚
,
赵亦辉
摘要:
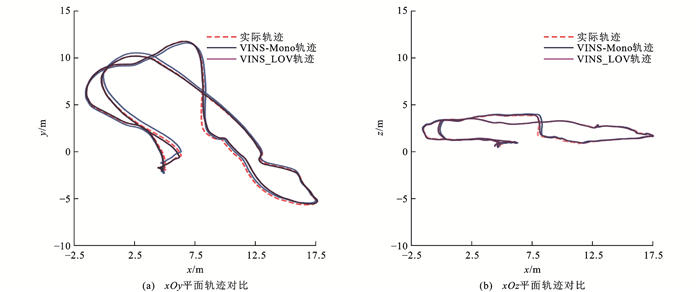
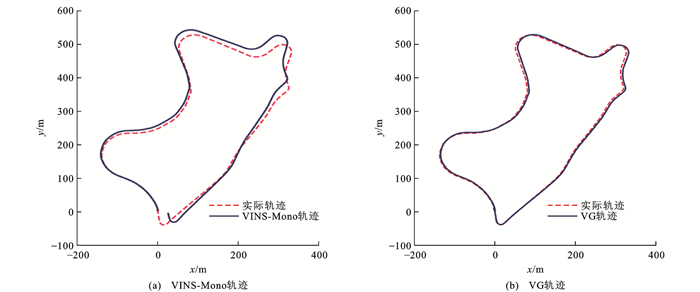
为在大范围低可见度环境下实现无人驾驶汽车的高精度定位,基于VINS-Mono算法的系统框架,在系统的前端与后端分别增添了RFAST弱光图像增强模块与VG融合定位模块,提出了一种融合定位算法LVG_SLAM; RFAST弱光图像增强模块采用小波变换将原始输入图像的细节信息与亮度信息分离,对于包含原始图像噪声的细节信息通过统一阈值和均值滤波2种方式实现噪声抑制,并利用双边纹理滤波算法进行细节增强,在此基础上,根据多尺度Retinex算法增强图像的对比度,提高低可见度环境下角点提取的成功率,从而保证图像跟踪的稳定性,改善定位算法的鲁棒性; 基于无迹卡尔曼滤波算法,VG融合定位模块将GNSS定位信息与惯性导航测量信息进行松耦合,融合定位结果作为约束引入VI-SLAM后端,通过联合非线性优化的方式减少累积误差对算法定位精度的影响。计算结果表明:相较于VINS-Mono算法,改进的LVG_SLAM融合定位算法在EuRoC与Kitti公开数据集上表现更加出色,均方根误差分别降低了38.76%与58.39%,运动轨迹更贴近真实轨迹; 在实际夜晚道路场景下,LVG_SLAM算法将定位误差控制在一定范围内,顺利检测到闭环使得定位表现得到大幅改善,均方根误差、平均误差、最大误差、中位数误差分别降低了79.61%、82.50%、71.31%、83.77%,与VINS-Mono算法相比,在定位精度与鲁棒性方面具有明显的优势。
更多>
2022, 22(3): 251-262.
doi:
10.19818/j.cnki.1671-1637.2022.03.020
摘要
(
1725
)
HTML
(
499
)
PDF (17931KB)
(
169
)
引用
(
)
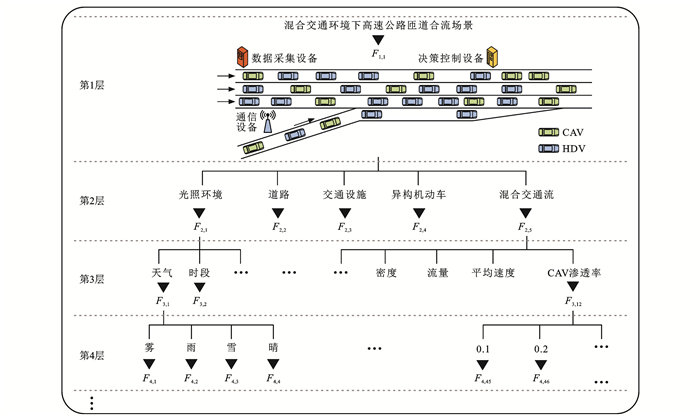
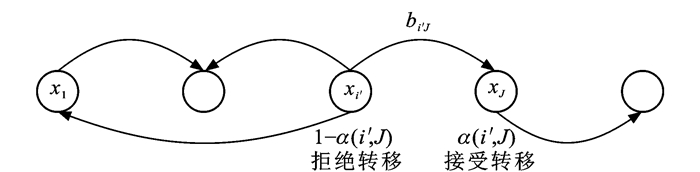
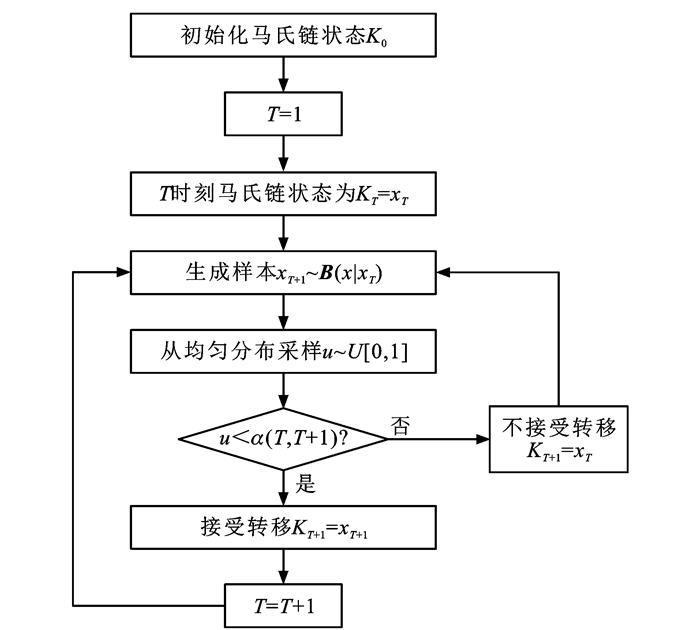
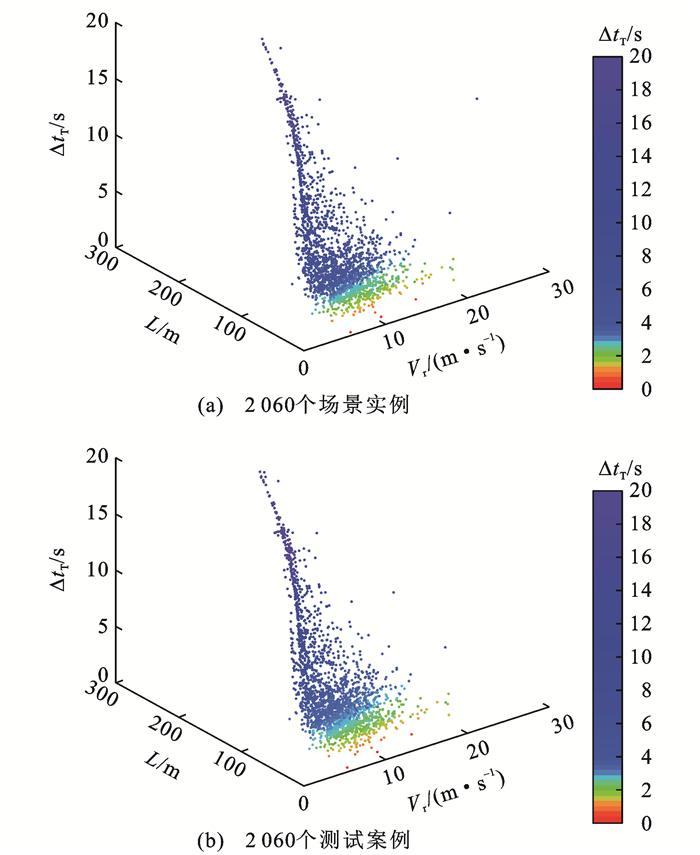
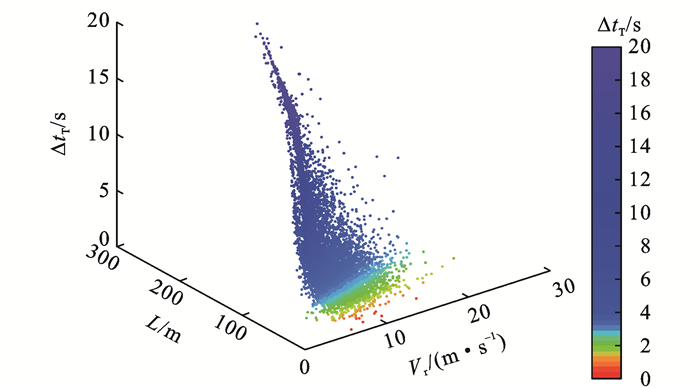
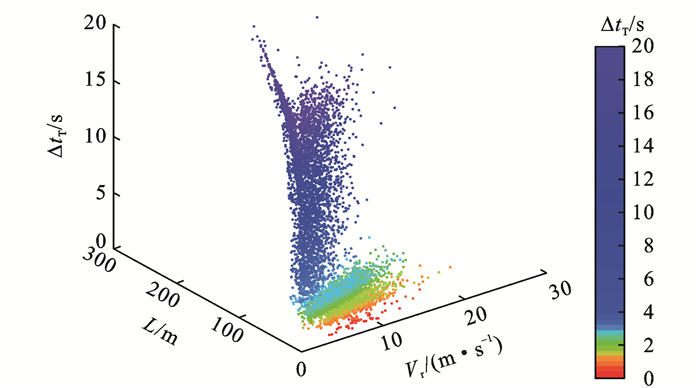
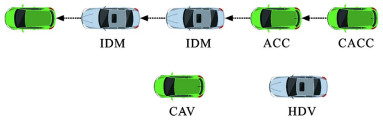
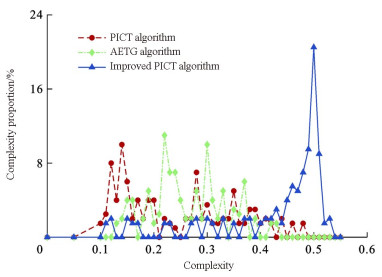
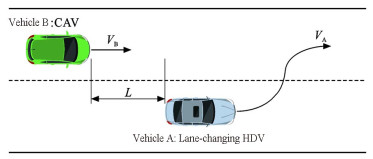
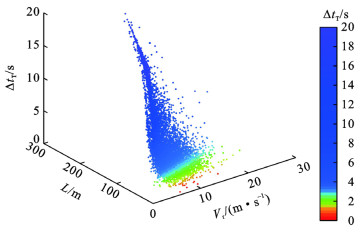
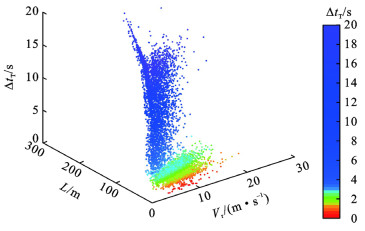
车路协同混合交通场景要素解析与测试案例生成
赵通
,
上官伟
,
柴琳果
,
郭蓬
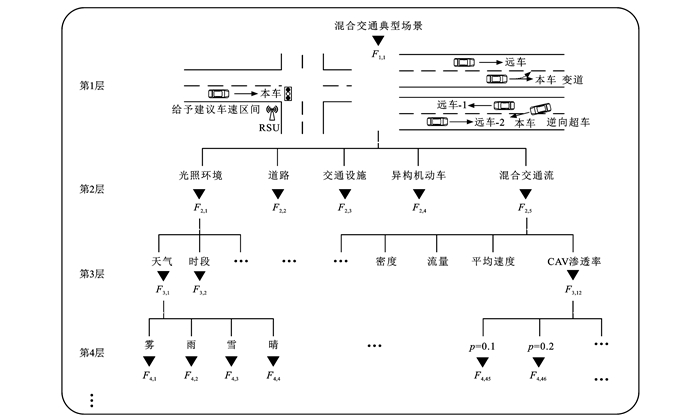
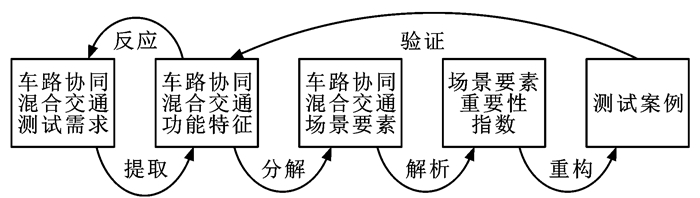
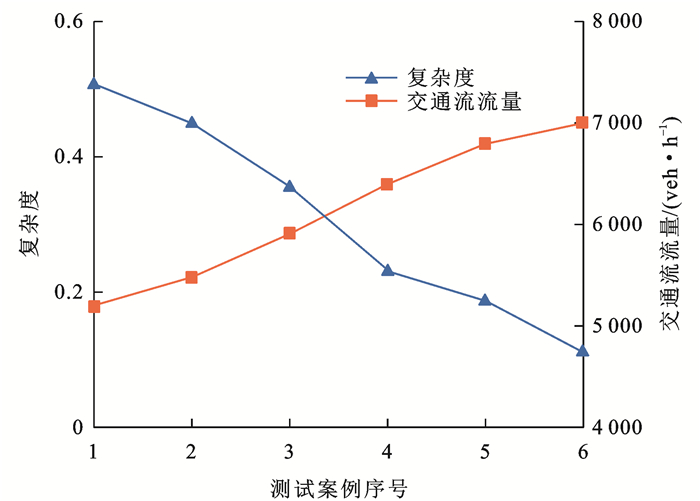
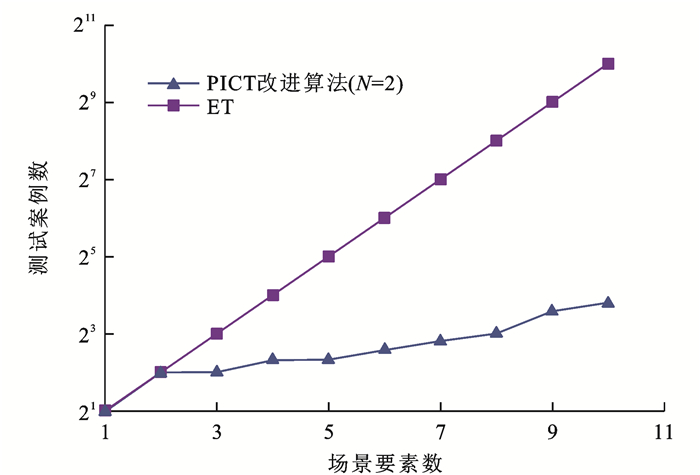
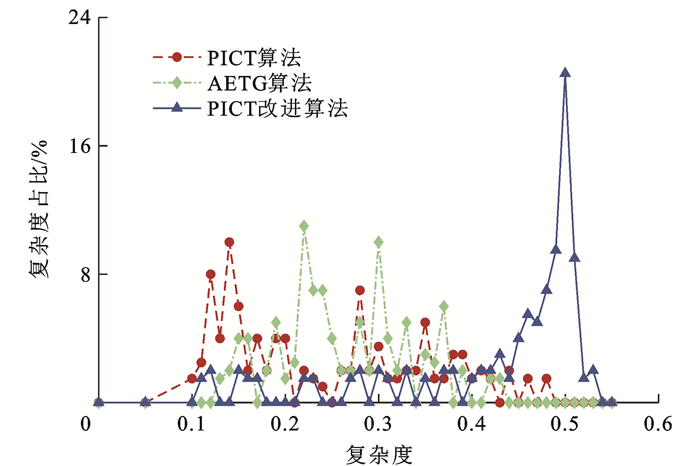
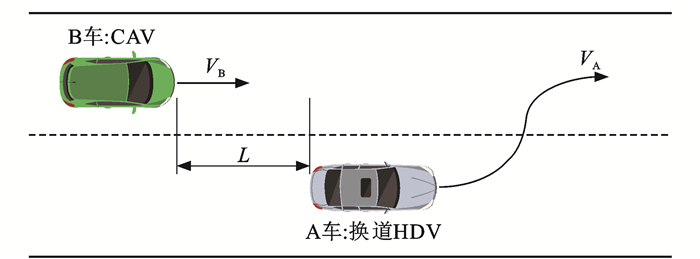
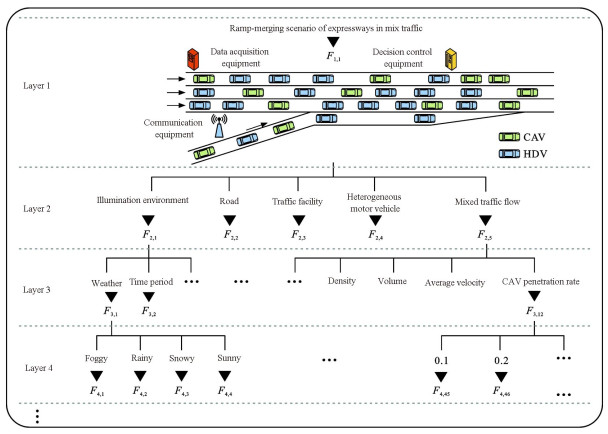
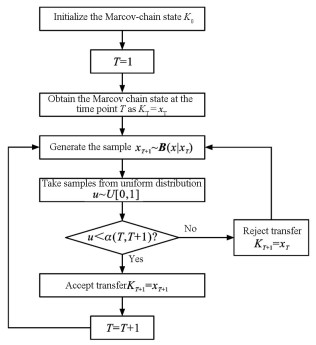
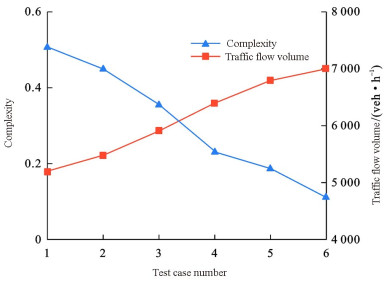
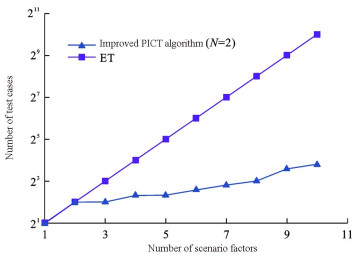
摘要:
面向混合交通环境下多车效率类和单车安全类场景测试需求,研究了基于混合交通场景要素解析的车路协同测试案例生成方法; 为提高测试案例的多样性和覆盖度,分析了混合交通特征要素相互作用机理,构建了混合交通场景要素层次模型,提出了场景要素重要度的一致性描述指标,并在此基础上建立了测试案例复杂度模型; 针对多车效率类场景仿真测试,提出了复杂度激励的组合测试案例生成方法,设计了场景要素强耦合组合策略; 针对单车安全类场景仿真测试,提出了基于复杂度聚类的蒙特卡洛测试案例生成方法,设计了风险场景特征参数抽样机制; 选取车路协同混合交通典型场景开展仿真试验,验证了提出的测试案例生成方法的有效性。研究结果表明,对于多车效率类混合交通高速公路匝道合流场景测试,提出的方法比传统成对测试方法的场景最大复杂度提高了11.93%,高复杂度场景占比提高了60.02%,测试案例覆盖度提高了12.08%;对于单车安全类车路协同换道预警场景测试,提出的方法比传统蒙特卡洛测试方法的危险场景数提高了195%,且其参数估计误差降低了5.95%,高风险场景数提高了119%,且其参数估计误差降低了4.78%。可见,提出的方法能够提高测试案例的多样性和覆盖度,有助于开展复杂环境和风险条件下车路协同系统功能测试,能够有效满足多车效率类和单车安全类场景测试需求。
更多>
2022, 22(3): 263-276.
doi:
10.19818/j.cnki.1671-1637.2022.03.021
摘要
(
3695
)
HTML
(
1153
)
PDF (7793KB)
(
289
)
引用
(
)
文章推荐
更多>
低空无人机物流公众接受度研究综述
智能飞行汽车:驱动未来城市空中交通
无人驾驶航空器自主探测与避让技术研究综述
铁道车辆齿轮箱动力学与故障诊断研究综述
FMEA/FMECA在船舶工程中的应用综述
关键词检索
所有
标题
作者
关键词
摘要
Doi
栏目
作者地址
基金
中图分类号
期刊检索
2026年
2025年
2024年
2023年
2022年
2021年
2020年
2019年
2018年
2017年
2016年
2015年
2014年
2013年
2012年
2011年
2010年
2009年
2008年
2007年
2006年
2005年
2004年
2003年
2002年
2001年
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第6期
第5期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
第4期
第3期
第2期
第1期
期刊动态
更多>
翟婉明院士莅临《交通运输工程学报》轨道交通方向青年编委会会议,指导办刊工作
《交通运输工程学报》“大宗固废在交通运输工程中的资源化利用”专刊征稿
《交通运输工程学报》“航空运输业与航空制造业融合下的前沿技术、装备与系统”专刊征稿
《交通运输工程学报》“水路交通智能技术与装备”专刊征稿
学报动态
《交通运输工程学报》“多年冻土区交通基础设施韧性提升技术” 专刊征稿启事
作者园地
更多>
关于文章中的中国地图
中图分类号
友情链接
更多>
《工程索引》(Ei Compendex)
《斯高帕斯数据库》(Scopus)
交通运输工程学报(CNKI)
长安大学学术期刊管理中心
交通运输工程学报(英文)
中国公路学报
×
Close
导出文件
文件类别
RIS(可直接使用Endnote编辑器进行编辑)
Bib(可直接使用Latex编辑器进行编辑)
Txt
引用内容
引文——仅导出文章的Citation信息
引文和摘要——导出文章的Citation信息和文章摘要信息
×
Close
引用参考文献格式